2 discutiremos a foliação do espaço e como o tensor de Riemann pode ser escrito em termos de curvaturas extrínsecas e intrínsecas. Portanto, as projeções do tensor de Ricci estão nas outras direções. 24), temos que o escalar de curvatura pode ser reescrito como
Lista de Exercícios
Por exemplo, o grupo de Lie associado a um grupo de difeomorfismo de um parâmetro (conforme definido na Seção 1) é o conjunto de R reais com a operação de adição. Um resultado importante da teoria dos grupos de Lie é que um grupo pode ser descrito por uma álgebra de Lie conexa,6 sem questões globais sobre a topologia do grupo.
Espaços Homogêneos
Quando consideramos o efeito do grupo sobre uma variedade, temos que os campos vetoriais associados à álgebra de Lie do grupo são exatamente os campos Killing, e que a álgebra comutadora desses campos é um homomorfismo da álgebra de Lie do grupo . Observe que o subgrupo GT possui as mesmas órbitas do grupo de simetria e, além disso, os vetores de sua álgebra de Lie são linearmente independentes, e a dimensão deste subgrupo é igual à dimensão da variedade sobre a qual atua.
Espaços Homogêneos e Isotrópicos
Portanto, como γab é constante em toda a variedade, podemos escolher γab = δab, onde δab =diag(1,1,1), o que significa que inicialmente escolhemos eaµeaνγµν|p =δab. Portanto, como matrizes 3×3 antissimétricas formam um espaço linear tridimensional, podemos convenientemente escolher uma base eaµ tal que abc seja completamente antissimétrica com 123 = 1. Como Θab é constante em hipersuperfícies, então £raΘab = 0 48) Consequentemente, temos que Θab ∝δab, ou seja,.
Lista de Exercícios
3, reduzimos o número de componentes a serem determinados e procedemos à derivação das equações de movimento para graus de liberdade não fixos usando a relatividade geral (GR). Utilizando a identidade reduzida de Bianchi (Eq. 8) e as equações de Einstein, obtemos que o TEM deve satisfazer.
Lista de Exercícios
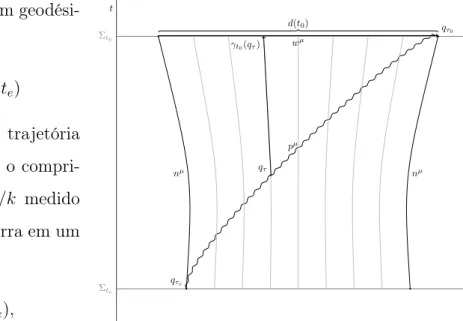
A coordenada α associada ao campo vetorial via Eq. 52) é simplesmente o tempo real medido pelos observadores isotrópicos descritos por nµ. Como é convencional na literatura, também definimos a quantidade h =H0/(100 km s−1Mpc−1) que chamamos de constante de Hubble adimensional. Caracteriza-se pela relação entre densidade de energia e pressão, além da evolução da temperatura.
Com o valor de H2(t), podemos definir a densidade crítica no tempo t, ρc = H2/κ∗, de modo que necessariamente teremos Ke = 0 se a densidade de energia do universo for igual à crítica. Usando esta equação de estado na equação 82) vemos que ρ é constante como esperado e da mesma forma que fizemos para líquidos definimos a densidade ΩΛ0 =R2HΛ/3. Além da radiação, descrevemos o universo como contendo uma densidade de partículas frias Ωm0 (mc2 kBT), ou seja, descritas por um fluido semelhante a poeira.
Como no momento em que este limite é atingido a densidade total de energia é dominada pela radiação (Ωr0x4 Ωm0x3), a aproximação semelhante à poeira é suficiente.
Evolução Para um Único Fluido
Em outras áreas da física, um processo de média é geralmente usado para determinar o valor de fundo e definir a perturbação como a diferença entre uma quantidade e sua média. Em vez de definir um procedimento de média para determinar o modelo de fundo, assumiremos que o modelo de fundo é FLRW e que a diferença entre ele e o modelo real (também chamado de modelo perturbado) é pequena. Neste caso acontece, como referimos no início deste capítulo, que a definição de perturbação é ambígua, uma vez que a definição do modelo de fundo é arbitrária.
A questão é: de que diferentes maneiras podemos definir a métrica de fundo gµν na variedade M de modo que δgµν seja pequeno. Porém, se fizermos uma mudança de coordenadas em M gerada por −uµ, este tensor será novamente dado por Tν1ν2..νm. É neste sentido que alguns livros didáticos ou artigos de revisão referem-se à mudança de medida como uma mudança de coordenadas onde estão as quantidades de fundo.
Neste trabalho, todas as mudanças de calibre serão seguidas por uma mudança de coordenadas, de modo que os tensores definidos na variedade de fundo M◦ se tornem invariantes.
Quantidades Perturbadas
Em geral, as partes escalar, vetorial e tensorial (nas hipersuperfícies e não na variedade M) da perturbação métrica são definidas como projeções usando um sistema de coordenadas anexado à variedade de fundo. A variedade de fundo possui um conjunto bem definido de seções espaciais nas quais temos homogeneidade e isotropia, que definem um campo covetor nµ =−∂µα. Este campo é normalizado no contexto da métrica de fundo e, portanto, terá uma norma diferente de menos um na métrica perturbada.
Para evitar objetos mistos, podemos criar uma seção arbitrária em M para que ela difira das seções de M◦ apenas na primeira ordem. Suponha que a métrica de fundo tenha curvatura espacial zero, neste caso δR = R - Rb é invariante de calibre, mas Rb fornece a curvatura espacial de alguma seção espacial arbitrária definida em M, ou seja, δR é invariante de calibre, mas depende da escolha de hipersuperfícies em M. As perturbações simples, por outro lado, são completamente definidas em cada variedade; eles podem ser invariantes de calibre se o valor de fundo for zero, mas sua interpretação é complicada porque estamos comparando objetos definidos em diferentes seções espaciais.
Vale a pena notar que no caso do FLRW, a única perturbação simples que podemos definir independentemente das seções espaciais é o tensor de Weyl, que é zero na métrica de fundo e, portanto, δCµναβ é invariante de calibre e não depende da escolha de hipersuperfícies. , o que simplifica sua interpretação física.
Decomposição das Perturbações
Mas primeiro a projeção. depende apenas do valor de fundo de mˆµ, uma vez que Cµναβ é zero na métrica de fundo. Notamos também que a comutação de derivadas espaciais e derivadas de Lie na direção normal cancelam-se mutuamente quando atuam em qualquer tensor, ou seja, Operador Laplace – Beltrami D2 ≡DµDµ ou seja Podemos decompor as perturbações do vetor Bµ da seguinte forma. onde B é uma função arbitrária e Bµ um campo vetorial espacial com divergência zero, ou seja, γ[Bµ].
Assim, a equação Bµ=Bµ−DµD−2DαBα define um campo covetorial único de divergência zero associado a Bµ. Isto mostra, portanto, que a equação 101) define uma decomposição única para o campo covetorial Bµ. Com isso, temos que Fν está determinado de forma inequívoca e portanto a decomposição na equação, mas vale ressaltar que esta decomposição só foi possível devido à forma especial da métrica de fundo e, consequentemente, à curvatura das hipersuperfícies. Outros termos que poderiam aparecer são do tipo DµD2Bµ, mas usando a regra de comutação dada na equação 100), podemos ver que esta quantidade será escrita como DµD2Bµ = D2DµBµ+ 2KDµBµ e é portanto uma função de DµBµ.
Portanto, se tivermos uma equação diferencial escalar, sabemos que ela envolverá apenas as perturbações escalares φ, B, ψ e E.
Cinemática dos Campos Vetoriais
Isto mostra que numa equação vetorial, a parte escalar da equação é satisfeita independentemente. Em suma, dada uma equação tensorial do tipo Mµν = 0, também linear nas perturbações, temos que o traço fornece uma equação que deve ser satisfeita independentemente, ou seja, Mµµ = 0. A parte sem rastros Mtµν ≡ Mµν −γµνMµµ/ 3 = 0 fornece a segunda equação escalar quando a dupla divergência é removida, ou seja, DµDνMtµν = 0.
Portanto, não há a priori nenhum tipo de particionamento nem campos de vetores privilegiados como acontece se for da variedade FLRW (ver Seção 3). O próximo passo é definir o projetor de hipersuperfície definido por gˆµν como ˆ. 117) Observe que se o campo mˆµ não for perpendicular às hipersuperfícies, não definirá seções espaciais e o projetor γˆµν não terá o mesmo significado. Podemos agora calcular a curvatura externa associada ao campo mˆµ. Como este campo não é necessariamente geodésico, a curvatura externa é dada por Θbµν ≡ ˆ. onde o termo previsto é dado por γ[Fµνγnγ] =γ. 121) Se substituirmos este resultado pela curvatura externa, escrevemos como 122) Utilizando a métrica perturbada para aumentar o índice Θbµν, obtemos também uma versão com um índice covariante e outro contravariante. e o colapso da equação acima produz um traço conhecido como escalar de expansão perturbada. 122) vemos que a vorticidade é dada por.
Como discutimos acima, mˆµ não é necessariamente geodésico, então a segunda grandeza cinemática que nos interessa é a aceleração das curvas definidas por mˆµ, ou seja,. 128) Substituindo este resultado pela aceleração obtemos.
Curvatura das Hipersuperfícies
Neste caso vale a pena notar que o tensor Rbµναβ não possui as mesmas simetrias que um tensor de Riemann (ver Eq. 7). Em termos do tensor Υανβ acima, a projeção espacial torna-se. 139) Alternativamente, podemos expressar esta perturbação diretamente em termos das perturbações da métrica, ou seja, Podemos obter a projeção normal das perturbações no tensor de Ricci usando os índices ν e β na Eq.
Variáveis Invariantes de Calibre
Os termos vetoriais de Cµν também se cancelam, portanto a perturbação na projeção espacial da curvatura das hipersuperfícies de fundo depende apenas de ψ e Wµν. Como escolhemos as mesmas hipersuperfícies para descrever as variáveis cinemáticas para as métricas de fundo e perturbadas, os covetores nˆµ e nµ são normais (ˆγνµnµ= 0 e γνµnˆµ= 0) em relação às duas métricas. Se tivéssemos utilizado a métrica de fundo, teríamos gµνnνγµα = 0, ou seja, Bα mede a componente espacial adquirida por qualquer covetor temporal quando mapeado em um vetor usando a métrica perturbada.
Analogamente, um vetor espacial uµ em relação à métrica de fundo (γ[uµ] = uµ) também é espacial em relação à métrica perturbada, ou seja, γˆ[uµ] =γ[uµ] +δγνµuν =uµ. Entretanto, quando mapeamos para um covecur usando a métrica perturbadaµˆgµν, ele obtém uma componente temporal uµˆgµνnν = −uµBµ, onde novamente teríamos uµgµνnν = 0 se usássemos a métrica de fundo. Portanto, vemos que a presença de E faz com que os vetores ortogonais na métrica de fundo não sejam ortogonais na métrica perturbada.
Qualquer combinação linear com os coeficientes definidos no múltiplo de fundo também será invariante.
Lista de Exercícios
Nas seções 11 e 12 apresentamos os métodos de Máxima Verossimilhança e Mínimos Quadrados, respectivamente, a partir dos quais obtemos os estimadores para os parâmetros cosmológicos. Nas Seções 14 e 15, apresentamos o Perfil de Verossimilhança e os métodos da Matriz de Fisher usados para calcular regiões de confiança.
Estimadores
O método da Máxima Verossimilhança é uma técnica para estimar os valores dos parâmetros ~θ dado o conjunto de dados finito xi. Como o logaritmo é uma função monotonicamente crescente, os valores dos parâmetros que maximizam a probabilidade também maximizam logL(~θ;xi). Para obter a região do espaço de parâmetros onde a probabilidade de obtenção do dado {yi} é maior ou igual a 1−p, ou seja, para obter a região de confiança, utilizamos o método Perfil de Verossimilhança.
No caso em que, por exemplo, desejamos obter a região de confiança no subespaço (θ1, θ2), a hipótese H1 consistirá na manutenção destes parâmetros. Dado o nível de confiança 1−p da região, calculamos o valor de χ2ν=2 a partir da equação (213) e desta forma podemos obter os valores de θ1 e θ2 que satisfazem a equação (214). O custo computacional do cálculo de regiões de confiança com o método do perfil de verossimilhança pode ser muito alto, especialmente quando muitos parâmetros são estimados simultaneamente.
Esta é uma aplicação de um teorema que afirma que, no limite assintótico, o inverso da equação (219) é um estimador da matriz de Fisher. Portanto, para obter a região de confiança25 dos parâmetros θ1 e θ2, por exemplo, mantendo todos os outros fixos, basta calcular a equação paramétrica da elipse (ver a. 25 A região de confiança obtida com a matriz de Fisher aproxima-se assintoticamente da região de confiança do perfil de verossimilhança, da mesma forma que a distribuição dos estimadores é assintoticamente gaussiana.42]). No caso em que os parâmetros θi, onde i 6= 1,2 são livres, a região de confiança é obtida a partir da matriz inversa.
