Ix Momento de massa do sistema na direção x Iy Momento de massa do sistema na direção y Iz Momento de massa do sistema na direção z .. momento de massa em relação a um eixo deslocado da referência eixo Jx Momento de inércia para fundações estaqueadas na direção x. Jy Momento de inércia para fundações estaqueadas na direção y Jz Momento de inércia para fundações estaqueadas na direção z K coeficiente de mola.
Sistema com Um Grau de Liberdade
Vibrações Livres
- Vibrações Livres Não-Amortecidas
- Vibrações Livres Amortecidas
O movimento expresso pela equação (12) pode ser representado por um diagrama vetorial de Argand, Figura 3, no qual os vetores ortogonais x0 e x0 circulam em torno do ponto. É importante ressaltar que para pequenos valores da razão de amortecimento que ocorrem na dinâmica estrutural, a frequência d do movimento amortecido pode ser tomada como a frequência natural do sistema.

Resposta a uma Excitação Harmônica
A variação do ângulo de fase θ, que representa o atraso da resposta em relação à força excitante, com a relação de frequência β é mostrada na Figura 6, Lima e Santos (2008). Ao apresentar a resposta permanente do sistema não amortecido, observou-se a condição de ressonância (β=1), que corresponde a um crescimento ilimitado da resposta.

Sistemas com Vários Graus de Liberdade
As equações de movimento para um sistema com múltiplos graus de liberdade podem ser obtidas utilizando o princípio de D'Alembert, Clough e Penzien (1975). Substituindo as expressões dos vetores FR, FA, FI, equações (53) a (55) em (56), temos a equação matricial do movimento. Portanto, na análise dinâmica de sistemas lineares com múltiplos graus de liberdade, é conveniente representar os deslocamentos da estrutura utilizando modos normais.
Desta forma, a resposta dinâmica é obtida resolvendo cada uma das equações em coordenadas normais e sobrepondo os resultados para calcular a resposta nas coordenadas originais. A primeira realiza a integração direta das equações de movimento, e a segunda consiste em expressar a carga na forma de séries de Fourier (séries senoidais), determinando a amplificação do sistema para cada uma delas.
Introdução
Dados Básicos
O projetista deve analisar estes parâmetros para que as dimensões da base sejam dispostas de acordo com os critérios de segurança.
Requisitos Gerais de Fundação de Máquinas
Requisitos Específicos de Fundações em Estacas
A distância no plano entre os dois pontos, projetada segundo uma das dimensões (no plano) do bloco de coroamento, não deve ultrapassar 5% desta dimensão. Como exigência mínima, deverá ser utilizada uma penetração de 60 cm para o reforço das estacas no bloco (observando os comprimentos mínimos de ancoragem calculados conforme NBR e embutimento de 30 cm para estacas metálicas).
Critérios de Cálculo
O centro de gravidade da estaca e o centro de gravidade do conjunto fundação + máquina devem estar na mesma vertical. Portanto, o índice de Poisson pode ser interpretado como a razão entre as deformações transversais e longitudinais e, por ser um coeficiente, essa quantidade é adimensional. I é o momento de massa de m em torno de um eixo x paralelo a x' e passando pelo centro de gravidade de m.
Para avaliar o comportamento dinâmico da máquina, o N-1848 sugere a utilização de NBR de acordo com a faixa de severidade e classificação. Portanto, é necessário conhecer os parâmetros elásticos do solo, que podem ser resumidos como o Módulo de Elasticidade do Solo (E) e o Índice de Poisson.

Ensaio Crosshole
O método preferido é usado quando são necessários resultados de alta qualidade para grandes projetos. O método opcional é uma alternativa a um teste mais simples onde não há necessidade de um alto grau de precisão nos resultados. Neste método, nem todos os procedimentos devem ser seguidos, porém, D4428-07 alerta que seus resultados devem ser utilizados com cautela.
Essas informações são utilizadas como entrada para análises estáticas e/ou dinâmicas, como forma de avaliar módulo de cisalhamento, módulo de elasticidade, coeficiente de Poisson ou simplesmente para determinar desvios entre furos. A velocidade da onda é calculada a partir do tempo de viagem da onda e da distância entre os buracos.
Correlações Empíricas
Um aspecto importante a ser mencionado é a correção energética do teste SPT, que nem é comentada na maioria das correlações encontradas, Freitas (2009). Esses autores mostraram que o número de acertos no teste, N, é inversamente proporcional à energia que atinge o topo do conjunto da haste, pelo menos para N até 50. Portanto, a padronização do número de acertos do NSPT é necessária para permitir a comparação de correlações de diferentes países.
Portanto, o valor de N60 é determinado com base em fatores de correção (Cadotado) obtidos a partir da média dos valores sugeridos por Decourt et al.

Introdução
O Programa PLAXIS
Sub-rotinas
- Entrada de Dados (Input)
- Fase de Cálculo (Calculation)
- Saída de Dados (Output)
- Resultados Gráficos (Curves)
O programa PLAXIS Versão 8, utilizado nesta tese, é utilizado para tratar análises bidimensionais de elementos finitos. Ambos os modelos levam a um problema bidimensional de elementos finitos com dois graus de liberdade de translação por nó (direções x e y). Quando a geometria do modelo estiver totalmente definida e as propriedades do material aplicadas, é necessário que a geometria seja dividida em elementos finitos para que o problema possa ser processado na fase de cálculo.
Se o modelo de elementos finitos também contiver elementos estruturais, o PLAXIS calcula as forças nesses elementos. Na fase de representação gráfica, curvas como tempo ou carga versus deslocamento, tensão versus deformação e até mesmo trajetórias de tensão ou deformação de pontos previamente selecionados na rede de elementos finitos podem ser geradas.

Modelos Constitutivos
Módulo de Dinâmica
- Aplicação das Cargas
- Restrições
- Parâmetros para Modelagem
- Fase de Cálculo (Calculation)
Na fase de cálculo, a fase em que serão introduzidas as cargas dinâmicas deverá ser calculada utilizando a opção de análise dinâmica. Duas caixas de carga (A e B) podem ser utilizadas no PLAXIS para cargas distribuídas ou pontuais, cada caso pode ser ativado de forma independente. Semelhante às cargas distribuídas, existem dois casos de carga (A e B) que podem ser ativados de forma independente.
No módulo dinâmico PLAXIS existem as chamadas bordas absorventes, que se destinam a absorver o excesso de tensão criado pelas cargas dinâmicas que podem ser refletidas. No entanto, estes podem ser usados para determinar a velocidade de propagação das ondas de compressão (P) e cisalhante (S) e amolecimento do solo.
Elementos Finitos
PILAY
Para analisar um problema é necessário inserir todas as propriedades da estaca, como o comprimento total, o raio externo, a área da seção transversal, os momentos de inércia e torção, o peso específico, o coeficiente de Poisson e o módulo de elasticidade do material. Em relação ao solo, é necessário mencionar o número de camadas, a espessura de cada camada e para cada camada: a velocidade da onda cisalhante, a gravidade específica e o coeficiente de Poisson.
BLOCKSOLVER
Dados do Estudo de Caso
- Dados da Fundação
- Subsolo
- Máquina
- Instrumentação
- Avaliação do Solo
- Resultados
Os valores do módulo de elasticidade (E) e do módulo de cisalhamento (G) apresentados na Tabela 11 são obtidos diretamente das velocidades das ondas de compressão e cisalhamento. A Tabela 12 apresenta os valores obtidos para as mesmas grandezas a partir da correlação com o número de acertos Nspt do teste de som de impacto (Equação (71)). Os valores do índice de Poisson especificado baseiam-se no perfil geotécnico aprovado e seguem os valores sugeridos pela N-1848/2010 da Petrobras, reproduzidos na Tabela 3.
Os resultados de Machado (2010), expressos na Tabela 13, foram obtidos através do cálculo básico realizado analiticamente utilizando o método da mola elástica linear sem peso e utilizando programas de computador. Segundo Machado (2010), os valores de campo medidos no mancal entre o motor e a bomba foram de 1,7,10-5 m nas direções vertical e horizontal.

Máquina
O estudo de caso consistirá na análise dinâmica de uma situação real descrita no Capítulo 6 e será realizado através do módulo de dinâmica do programa informático PLAXIS 2D.
Bloco
Dados do Subsolo
Modelagem
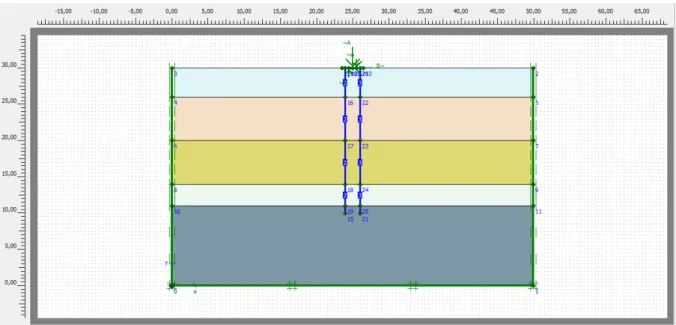
- Geometria
- Malha
- Aplicação das Cargas
- Subsolo
- Elementos Estruturais
O primeiro é atribuído na fase de entrada e o segundo na fase de cálculo e tem a função de acionar cargas dinâmicas: Carga ativa = multiplicador dinâmico x valor de entrada. Se adotarmos um multiplicador dinâmico de 1,87 (de forma que um dos valores após a divisão se torne unidade), obtemos os valores de entrada: Valores de entrada = carga ativa/multiplicador dinâmico. A Tabela 18 apresenta os resultados do ensaio Crosshole CH3, a partir dos quais são obtidos os valores da velocidade de propagação das ondas de compressão e cisalhamento.
Os valores de Nspt apresentados na Tabela 19 são os resultados da média aritmética entre todos os inquéritos disponíveis, conforme Tabela 6.12 de Machada (2010). Segundo Machado (2010), os valores do natural e do índice de Poisson são os valores médios das camadas.
Resultados
¹ - As velocidades calculadas pelo programa PLAXIS 2D foram divididas por 2 para permitir a comparação da velocidade limite com a velocidade efetiva conforme item 6.13 da N-1848 revisão C. Neste item serão analisados dois modelos diferentes no programa PLAXIS 2D onde a carga vertical é aplicada com excentricidades de 0,50 m e 1,00 m e os resultados das análises serão discutidos e comparados com o modelo do Capítulo 7 (sem excentricidade) .

Modelo 1 – Excentricidade de 50 cm
Modelo 2 – Excentricidade de 100 cm
Resultados
Os resultados para ambos os modelos, bem como os resultados da instrumentação, serão brevemente apresentados na tabela 23. ¹ - As velocidades calculadas pelo PLAXIS 2D foram divididas por 2 para permitir a comparação da velocidade limite com a velocidade efetiva, conforme ponto 6.13 da revisão N - 1848 C. Comparando os resultados da instrumentação com os deslocamentos horizontais das duas excentricidades aplicadas, pode-se dizer que o resultado é praticamente o mesmo.
O estudo de caso feito no Capítulo 7 com o programa Plaxis 2D considerou uma análise de deformação plana, enquanto o programa BLOCKSOLVER resolve um problema tridimensional. No texto a seguir, considera-se o efeito de uma estaca isolada submetida à excitação harmônica vertical para simular o mesmo efeito tridimensional em ambos os programas.

Modelo do PLAXIS
Para simular o efeito tridimensional no programa Plaxis 2D, a estaca isolada é considerada um caso assimétrico. A entrada de excitação harmônica vertical em ambos os programas foi selecionada aleatoriamente para fins de comparação de resultados.

Modelo do Blocksolver
Resultados
Resumo dos resultados
A partir dos resultados obtidos na análise do efeito 3D no modelo, constatou-se que a variação dos deslocamentos foi da ordem de 9%.
Estudo de Caso – Modelo no Estado Plano de Tensões
Podemos então observar que os valores de deslocamento medidos estão muito próximos dos calculados pelo programa PLAXIS 2D. Com base nos resultados obtidos no programa PLAXIS 2D, a velocidade horizontal (4,5 mm/s) estaria no limite aceitável para N-1848 na faixa de severidade B, o que é considerado satisfatório. Os resultados do programa Plaxis 2D são ligeiramente melhores que as medições experimentais devido ao fato de que a análise axissimétrica leva em consideração apenas parcialmente o efeito de amortecimento da radiação, ao contrário da resposta tridimensional realista.
Como sugestão para trabalhos futuros, recomenda-se comparar as análises aqui apresentadas com resultados obtidos através da aplicação do programa PLAXIS 3D, comparando os resultados com abordagens de deformação plana. Dissertação de mestrado, Faculdade de Engenharia da Universidade do Estado do Rio de Janeiro, Rio de Janeiro, Brasil, 2009.