By exploiting the ISS(Input-to-StateStable/Stability) properties of the investigated systems, it is thus possible to guarantee that the proposed controllers are able to stabilize globally or to regulate the considered systems locally. In [11], they presented an algorithmic inverse optimal design for a class of feedforward systems and provided a detailed insight into the structure of the target system in the feedforward recursion. The first consists in the design of the ideal sliding variable, σ, with unitary relative degree, ρ, with respect to the discontinuous control law, u(t).
In the initial design phase, we must anticipate the dynamics of the sliding mode, and then design the sliding variable with the goal of stabilizing it. However, accurate differentiators are used in the simulation results to recover information related to system state variables that are assumed not to be measured in a realistic scenario. In addition, it should be noted that the case considered in this dissertation covers the presence of parametric uncertainties, exogenous disturbances and device nonlinearities.
Introduction
- Motivation
- State-of-the-Art of the Control Algorithms for Blood Glucose Regulation
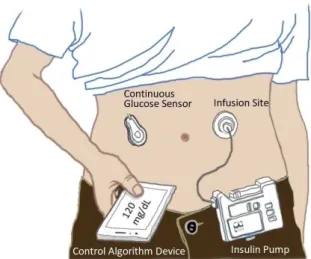
- Dual-Hormone Strategy
- Contributions
- Chapter Outline
1 REGULATION OF BLOOD GLUCOSE IN PATIENTS WITH TYPE 1 DIABETES USING FEEDBACK-CONTROL SLIDING MODE. Two different control strategies are proposed: First Order Sliding Mode Control (FOSMC) and Non-Single Terminal Sliding Mode Controller (NSTSMC). The output-feedback version of the proposed algorithms using higher-order sliding mode (HOSM) differentiators is also discussed and evaluated.
The subsequent two sections deal with the sliding mode control algorithms applied to achieve the control objectives.
Compartmental Systems
Subsequently, an exact differentiator based on Higher-Order Sliding Modes (HOSM) is discussed in section 1.9.
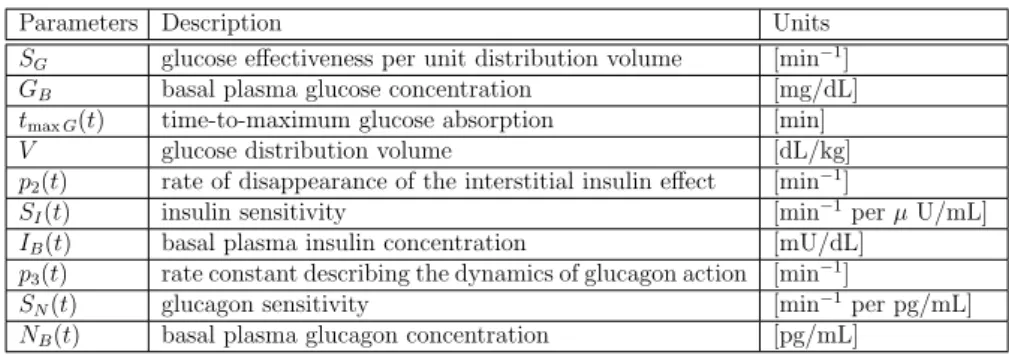
Mathematical Model
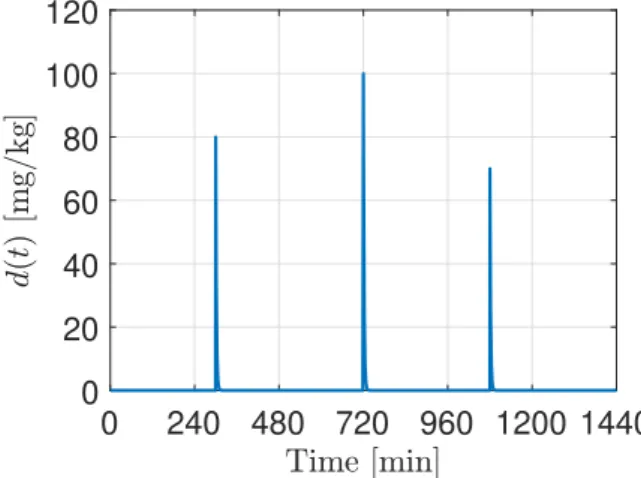
The author of the extended model [66] identifies the model parameters for three separate periods of the same day to imitate the circadian rhythm of three real subjects.5. From this point on, the numerical values of all model parameters will be referred to this topic. The time and delay in the unit step function are measured in minutes.
During the development of the stability analysis, the system parameters will be considered uncertain in such a way that its limits are known and described by.
Methodology and Control Objectives
Glycemic Curve
An illustrative record of the glycemia of a healthy subject over 24 hours is shown in Figure 2. It is the glycemic curve of a healthy subject whose organism is able to safely regulate blood glucose and avoid hypoglycemic and hyperglycemic cases [60]. ]. Figure 3, on the other hand, illustrates the glycemic curve of a patient with type 1 diabetes who strives to control blood glucose through regular exercise, a balanced diet, and multiple daily injections.
Using this graphic, we can see that standard open-loop insulin pump therapy cannot maintain blood glucose levels within safe limits 24 hours a day. The contrast between this type of therapy and the closed-loop control strategy will become more apparent in Section 1.10, when simulation results of the control algorithms used here are presented. The manufacturer of this sensor considers the safe blood glucose range to be between 80 and 140 [mg/dL], as shown on the vertical axis.
Food Ingestion as Input Disturbances
Bihormonal Actuator
First-Order Sliding Mode Control: Design and Stability Analysis
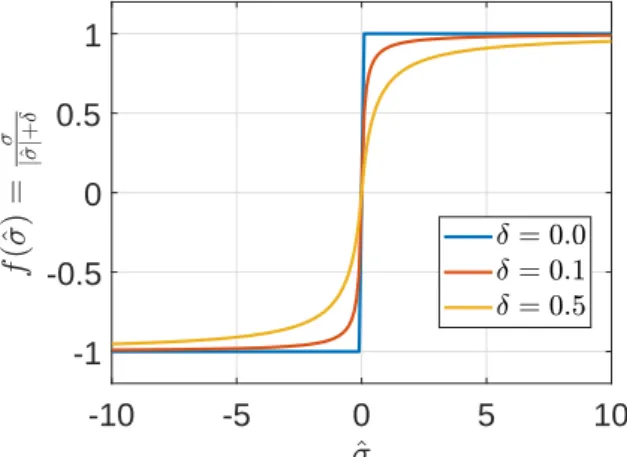
Boundary Layer for Chattering Alleviation
There are some problems inherent in the traditional sliding mode controller, such as: discontinuous control action and the so-called chattering effect. On the other hand, according to Figure 5, when δ 6= 0, the function f(ˆσ) is continuous and thus is the control actionu.
Terminal Sliding Mode Control: Design and Stability Analysis
Continuous NSTSMC for Chattering Alleviation
HOSM Exact Differentiators for Output Feedback
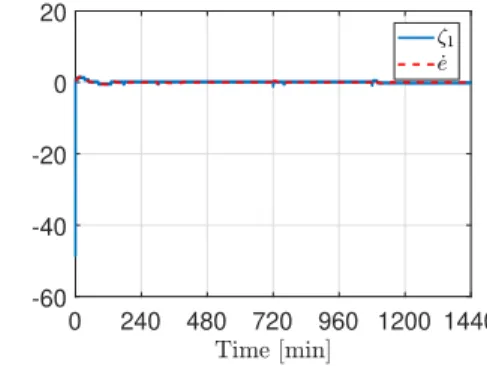
In this chapter, it is chosen to work with two different control strategies called First-order sliding mode control and non-singular terminal sliding mode control. An issue that arises in this context is the necessity of error-derived signal in Theorems 1 and 2. In this section, an exact differentiator based on High-Order Sliding Modes (HOSM) is applied to overcome this drawback.
In addition to its ability to provide the correct derivative of the output error e ∈ R, it provides the attenuation of small high-frequency noises [81]. Assuming that these upper bounds are constant and are available for controller design, an upper bound for the absolute value of the second time derivative ofe(t) can be obtained. These values were chosen from the numerical values of parameters (20)-(25), which, in turn, can be consulted in [66].
Numerical Examples
- Discontinuous FOSMC with Estimate of Sliding Variable
- Continuous FOSMC with Estimate of Sliding Variable
- Discontinuous Non-singular Terminal Sliding Mode Control
- Continuous Non-Singular Terminal Sliding Mode Control
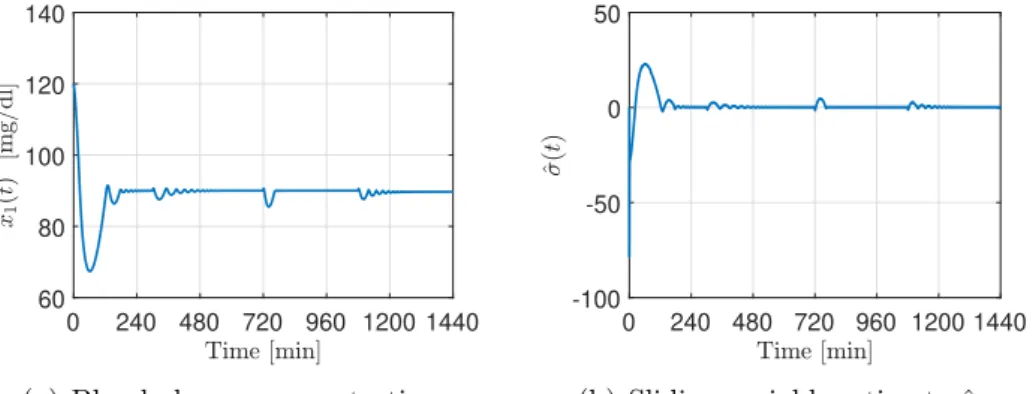
Figure 6(a) illustrates the ability of the controller to safely regulate blood glucose and avoid hypoglycemic and hyperglycemic episodes over the assessed period. The positive control action represents insulin injection into the organism of the patient with T1DM, while the negative control action represents glucagon injection. Since the control action can be understood as the union of the negative and the positive control actions, we can conclude that Figure 7 depicts the control action, which is particularly discontinuous and counts with the presence of chatter.
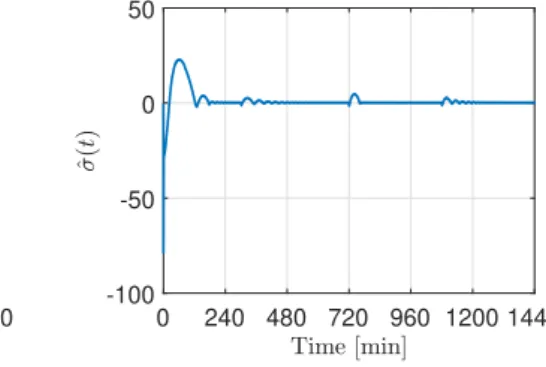
Therefore, an estimate of the ideal sliding variableσ can be constructed from ˆσ, which in turn guarantees that the ideal sliding state. It was said that the knowledge of this variable was necessary for the construction of the sliding surfaceσ = 0. In this sense, it is important to emphasize that neither the differentiator gain nor the modulation function of the controller is able to overlimit the amplitude of ˙d( t) in the moments that occur right after each of the daily meals.
For this reason, precisely in these moments, it is clear that the construction of the sliding surface, σ = 0, is not possible, as depicted in Figure 6(b). This phenomenon is characterized by small oscillations in the system output that can impair the performance of the control system. However, the chatter effects can be reduced by implementing the technique described in Section 1.7.1: the Boundary Layer [35].
As for the non-single terminal sliding mode controller, Figure 12(a) illustrates the ability of the controller to safely regulate and avoid the blood glucose. As a result, the regulation of blood glucose is granted, provided that a large amount of hormone is injected into the patient's bloodstream during the day.
Introduction
2 GLOBAL STABILIZATION FOR A CLASS OF HYPERCHAOTIC SYSTEMS WITH A CASCADE NORMS OBSERVER USING SECURE COMMUNICATION. Instead of using standard observers, we used cascaded norm observers to construct a norm bound for the unmeasured state vector in the proposed output feedback scheme. In addition, the developed controller is used for secure communication, where the main ingredients of the proposed recipe are fast synchronization and indirect encryption based on the concepts of sliding modes, peer-to-peer and average control.
Here, the term indirect refers to the fact that the message is not directly sent to the receiving device. Finally, it is worth noting that the control strategy presented here can be applied to a wide class of hyperchaotic systems to provide global stability properties using only output feedback, as discussed in the conclusions.
Seventh Dimension Hyperchaotic System
Filippov's definition [106] for the solution of discontinuous differential equations is assumed throughout the paper, since the input(s) is a switching-based control signal to be defined later. To avoid clutter, only the u symbol, without the t argument, represents a switching control law which is not a common function often when sliding mode occurs. On the other hand, we denote the extended equivalent control byu(t) (instead of ofueq(t)), which, by definition, is partially continuous.
Note that u can always be replaced by u(t) on the right-hand side of the differential equations. Moreover, the control action is chosen to be in the ODE describing the x5 dynamics, because by doing so, the output variable x5 has unitary relative degree, which makes the project of the controller simpler, since it does not need the derivatives of the output not. signal. Its chaotic behavior is illustrated in the case where no control action is applied and the system is free from disturbances.
![Figure 18 presents some of the state variables from the system (92)–(98). The initial condition chosen is x(0) = [ 0 1 0 1 0 1 0] T](https://thumb-eu.123doks.com/thumbv2/123dok_br/19794648.0/53.892.343.590.948.1105/figure-18-presents-state-variables-initial-condition-chosen.webp)
Cascade Norm Observers
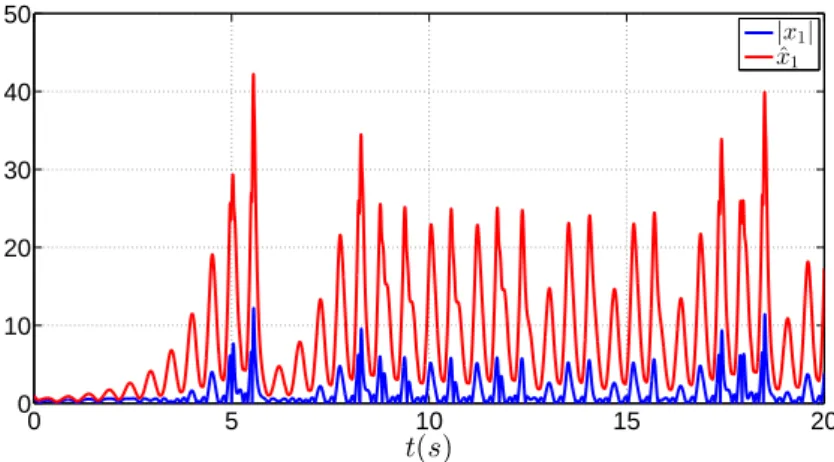
On the other hand, the solution of the norm observer differential equation (103) is given by. Using the equation theorem [106], there exists an upper bound ¯1(t)fory˜1(t) that satisfies the differential equation. 127) By integrating both sides of the above equation, we arrive at the solution. It is well known that the chaotic orbits remain at least within a bounded region of the state space even when x5 = 0, since the system (92)–(98) has two positive Lyapunov exponents [105].
Therefore, the cross terms xixjxk for i 6= j 6= k vanish if one of the variables eventually converges to zero. In the case of the state variable x2, the ISS property from (97) is verified with respect to the variable x6. Briefly, we can conclude that x5 goes to zero by the direct action of the controller, while the other state variables of the hyperchaotic system converge exponentially due to the ISS property of each of the subsystems in (92)–( 98).
The state of the closed-loop system is forced to reach an equilibrium point, as shown in Figure 21. Moreover, it is worth noting that the synchronization of such chaotic systems is nothing more than achieving the stabilization of the fault dynamics. In addition, the proposed sliding mode controller appears to be an attractive methodology for synchronization, as the convergence of the output signal can be achieved in finite time, and the convergence of other state variables is exponential and is also robust to exogenous disturbances.
Moreover, in a possible application, we could replace the fixed gain differentiator presented here with a variable gain differentiator [115] to reduce the sensitivity of the closed-loop control system to the measurement error/noise. Best paper presentation in the session “Epidemic Modeling and Control” of the 22nd International Conference on Systems Theory, Control and Computing (ICSTCC 2018), IEEE - Institute of Electrical and Electronics Engineers, Sinaia, Romania, October 2018. Blood glucose control in patients with diabetes type 1 through Output-Feedback Sliding Mode Control.
Output feedback generalization of variable-gain superspinning sliding mode control via global HOSM differentiators.
![Figure 2: Glycemia of a health subject (figure adapted from [1])](https://thumb-eu.123doks.com/thumbv2/123dok_br/19794648.0/27.892.297.626.322.524/figure-2-glycemia-health-subject-figure-adapted-1.webp)
![Figure 3: Blood glucose regulation of a DMT1 subject by means of a medical diet. The manufacturer of this sensor considers the safe blood glucose range to be between 80 and 140 [mg/dL], as indicated in the vertical axis.](https://thumb-eu.123doks.com/thumbv2/123dok_br/19794648.0/27.892.259.683.926.1052/figure-glucose-regulation-subject-manufacturer-considers-indicated-vertical.webp)