Metodologia para estimativa de estados e alocação de equipamentos de medição em sistemas de distribuição de energia elétrica. Metodologia para estimativa de estados e alocação de equipamentos de medição em sistemas de distribuição de energia elétrica.
CONSIDERAÇÕES INICIAS
Por esta razão, a estimativa de estado tem sido considerada uma ferramenta fundamental de apoio ao operador do sistema. Neste cenário, novas tecnologias e técnicas surgiram para resolver problemas relacionados à estimativa de modos SDE onde a disponibilidade de dados é menor em comparação ao segmento de transmissão.
REDES DE DISTRIBUIÇÃO INTELIGENTES
O conceito de redes inteligentes abre um leque de possibilidades que precisam ser exploradas para melhorar as condições de funcionamento do sistema elétrico. Portanto, o papel do estimador de condição é crucial em sistemas modernos de gerenciamento de energia devido à variedade de aplicações que dependem de dados precisos em tempo real para considerar a situação operacional do SEP [16].
OBJETIVO
É importante ressaltar também que a abordagem multiobjetivo é importante para oferecer às concessionárias de distribuição de energia soluções diversificadas e de qualidade dentro de um universo de alternativas de planejamento, para a seleção orientada da solução que melhor se adapta às suas circunstâncias e necessidades. Por fim, a consideração de sistemas de medição modernos, como o UMF, para o segmento de distribuição é motivada pela importância e atualidade do assunto à luz dos conceitos de redes inteligentes e de autocura aplicáveis às redes elétricas atuais.
PUBLICAÇÕES DECORRENTES DO TRABALHO
Outra contribuição desta tese é a inclusão de conceitos de dominância de Pareto, aplicáveis a problemas de otimização multiobjetivo, na metaheurística utilizada, denominada Modified Monkey Search (MMS) e baseada na técnica Monkey Search (MS), de forma inédita. . Em outras palavras, a otimização multiobjetivo via metaheurísticas MMS integradas aos conceitos de Pareto caracteriza outra inovação da presente proposta.
ESTRUTURA DA PROPOSTA DE TRABALHO
CONSIDERAÇÕES INICIAIS
Este processo é conhecido como estimativa de estado e motiva a pesquisa através da alocação ideal de equipamentos de monitoramento para garantir a observabilidade do sistema e a eficácia do estimador de estado, combinado com a minimização dos custos de investimento associados [24]–[37] . Em relação aos equipamentos utilizados para monitorar os sistemas de transmissão e distribuição, destacam-se os medidores inteligentes (MI) e as unidades de medição fasorial (UMF), que estão incluídos nas opções de investimento para estimativa de estados, visando uma resposta rápida e eficiente às diferentes condições de operação [ 38 ].
UNIDADES DE MEDIÇÃO FASORIAL
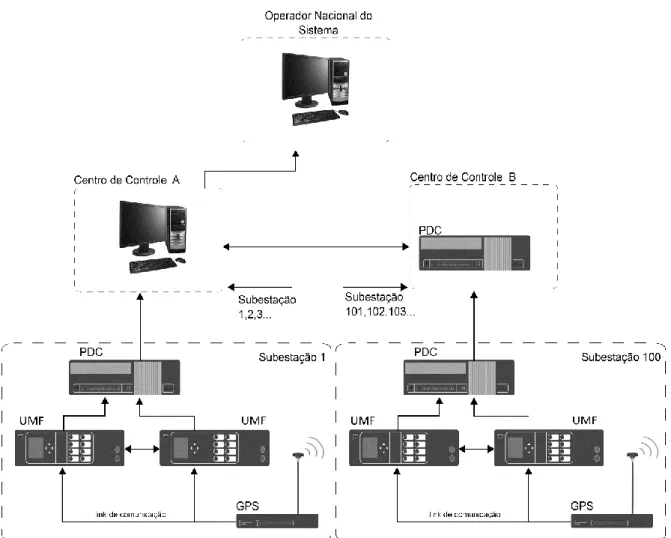
Sistema de Medição Fasorial
PDC (Phasor Data Concentrator): o concentrador de dados fasoriais possui uma série de funcionalidades, incluindo: (i) receber, organizar, disponibilizar e distribuir as medições fasoriais enviadas em tempo real; (ii) armazenamento de dados; Link de comunicação: um canal de comunicação transfere dados entre um UMF e um PDC e envia informações entre PDCs em diferentes áreas do sistema.
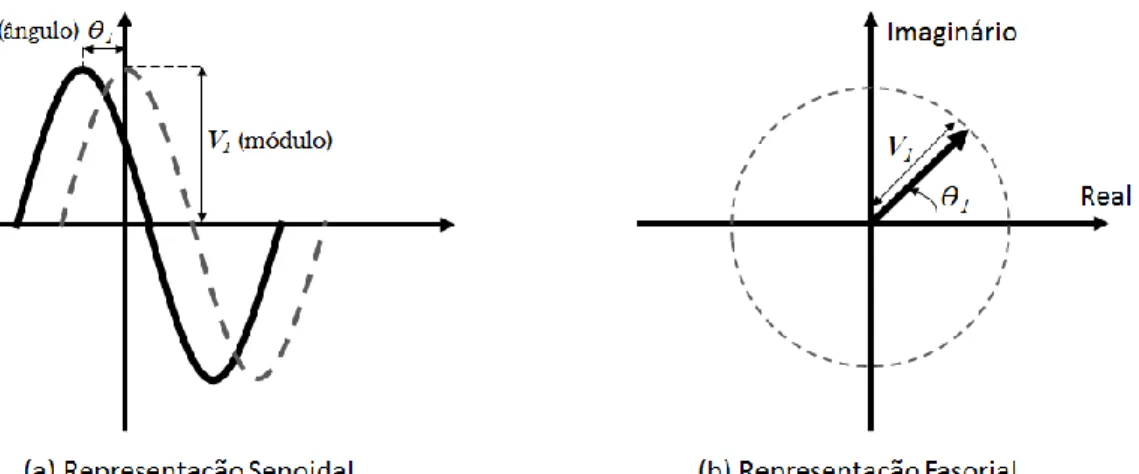
Medida Fasorial
A forma de transmissão de dados pode ser via linhas telefônicas, redes de baixa e média tensão, sistemas modernos baseados em tecnologia wireless e cabos de fibra óptica. Porém, outros UMFs possuem apenas alguns canais, o que permite a medição da tensão terminal e de uma das correntes nos ramos adjacentes [42].
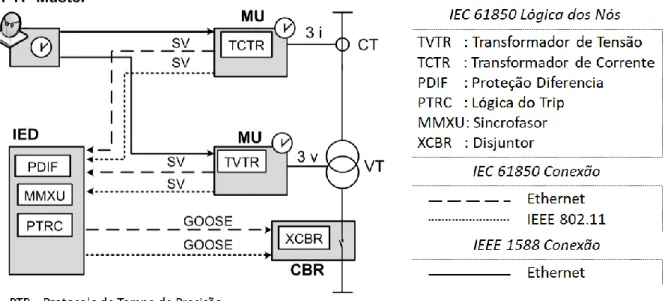
Norma IEC 61850
MEDIDORES INTELIGENTES
Evolução dos Sistemas de Monitoramento
Devido aos avanços tecnológicos, o processo de automação de redes traz os benefícios de confiabilidade, qualidade e segurança, além de garantir maior eficiência no monitoramento e localização de falhas e na restauração de energia [49]. A Figura 2.5 mostra o desenvolvimento do processo de integração de sistemas e equipamentos inteligentes no projeto e operação de sistemas de distribuição [49].
Tipos de Plataforma de Comunicação
Como os medidores inteligentes estão conectados diretamente aos centros de distribuição de energia, mesmo que haja perda de comunicação com os consumidores, esses equipamentos podem identificar prováveis pontos de falha e informar o centro para o devido reparo. Além disso, paralelamente a esta operação, existe o comportamento dinâmico do sistema, que pode realizar possíveis manobras automaticamente para reduzir o número de consumidores sem energia, ou seja, reduzir a área desenergizada, gerando benefícios para o consumidor e para o concessionária frente aos índices de confiabilidade exigidos.
ESTUDOS ENVOLVENDO UMF E MI NA TRANSMISSÃO
Em [56], a atribuição do número mínimo de UMFs é determinada tendo em conta a indisponibilidade de canais de comunicação e cortes de energia em determinadas agências. Utilizando uma abordagem semelhante, em [60] a alocação de UMFs é determinada considerando o tratamento de vários requisitos, como observabilidade total e otimização do processo de estimativa de estado.
ESTUDOS ENVOLVENDO UMF E MI NA DISTRIBUIÇÃO
Como a implementação completa da instrumentação é economicamente inviável, os processos de estimativa de status são essenciais para controlar a operação. O desempenho da aplicação de IMs para estimar estados e melhorar a observabilidade de um sistema é avaliado em [74]-[76].
ETAPAS DO PROCESSO DE ESTIMAÇÃO DE ESTADOS
Método do mínimo valor absoluto
Para esta suposição, técnicas de programação linear foram utilizadas para formular e resolver o processo de estimação de estado como um problema de programação linear. 87] propuseram resolver o problema LAVM através do método Simplex de programação linear, adaptando restrições de igualdade e desigualdade no restante da medição, melhorando o desempenho e também a eficiência computacional do algoritmo proposto.
Estimador de Máximo de Verossimilhança
A função objetivo de minimização deste método consiste na soma da diferença entre os valores absolutos das grandezas estimadas e das grandezas medidas com as restrições da equação de medição. Já em [88], o método do ponto interior (MPI) foi utilizado para resolver o problema de programação linear para o problema de estimação de estado LAVM, que se mostrou mais eficiente em termos de convergência e tempo computacional comparado ao considerado em [87 ] via Simplex. .
Método de processamento de dados afetados por erros
ALTERNATIVAS PARA APERFEIÇOAMENTO DO PROCESSO DE
- Filtro de Kalman
- M-Estimador
- Filtro de Raiz Quadrada
- Inteligência Artificial
O método do filtro de Kalman tem a desvantagem de ser incapaz de lidar com grandes mudanças na carga e na produção. A técnica do Filtro de Raiz Quadrada reduz o nível de incerteza nas medições, economiza tempo de computação e uso de memória em comparação com a técnica tradicional do filtro de Kalman.
CONSIDERAÇÕES FINAIS
Redes Neurais Artificiais (RNAs) são uma ferramenta bastante promissora no processo de estimação de estados, uma vez que este problema consiste no processo de otimização das variáveis de estado da rede. Esses vetores de estado previstos são então usados na fase de filtragem para obter uma melhor previsão das variáveis de estado e melhores estimativas dos vetores de estado com o mesmo tempo computacional dos métodos convencionais.
CONSIDERAÇÕES INICIAIS
COMPOSIÇÃO DO ESTIMADOR DE ESTADOS DC
O procedimento para obtenção do estado estimado (𝑥̂) do sistema consiste em resolver a equação (3.4) para que o desempenho do processo de estimação do estado seja avaliado com o índice da equação (3.2).
VARIÁVEIS DE ESTADO
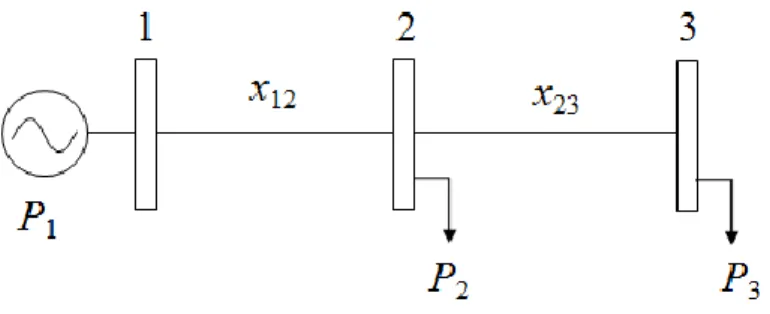
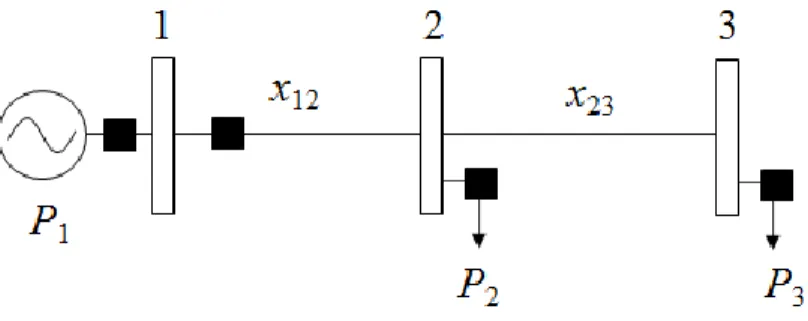
O modelo de rede requer a definição das variáveis do sistema, as equações de balanço de potência ativa para as barras 1, 2 e 3 e, por fim, a definição das variáveis de estado. Porém, ao definir as variáveis de estado 𝑃̂1 e 𝑝̂12, por exemplo, e mesmo conhecendo esses valores inicialmente, as demais variáveis permanecem indefinidas pelo modelo de equação de rede anterior.
EQUAÇÕES DAS MEDIDAS
Variáveis de estado: Como existem oito variáveis de problema e seis equações de rede independentes, duas variáveis (nv – ne) podem ser escolhidas como variáveis de estado, por exemplo 𝜃̂2 e 𝜃̂3. Assim, o modelo de mensuração é baseado nas relações do modelo de rede entre as variáveis de estado e a variável medida.
RESOLUÇÃO DO PROBLEMA DE ESTIMAÇÃO DC
Assim, com todos os valores definidos, é possível obter estimativas das variáveis de estado através da equação (3.4), obtendo assim o sistema de equação (3.10). Para tanto, os resultados do sistema da equação (3.10) são aplicados à equação (3.9.a), obtendo-se as estimativas inerentes às medições conforme equação (3.11.a), bem como os resíduos conforme equação (3.11 ) .b) .
COMPOSIÇÃO DO ESTIMADOR DE ESTADOS AC
Para obter as correções ∆𝑥̂𝑛, é necessário linearizar as equações não lineares h(x) em torno do ponto xn, obtendo-se assim a equação (3.17). Se reescrevermos esta equação com o Gn definido e usarmos (3.18.b), obteremos a expressão de atualização final como na equação (3.21).
FUNÇÃO NÃO LINEAR PARA O SEP
Durante esse processo, o vetor de correção ∆𝑥̂𝑛 é encontrado pela equação (3.21), que atualiza o vetor estimado pela equação (3.16), até que o critério de parada, dado por uma tolerância () para o resíduo máximo, seja alcançado conforme a equação . (3.22).
COMPOSIÇÃO DA MATRIZ JACOBIANA H
ESTIMAÇÃO DE ESTADOS COM DIVERSIDADE DE MEDIDAS
Etapa 1 – Processamento de dados de menor precisão
Onde e1 é o vetor de erros de medição, representado como variáveis aleatórias gaussianas com matriz de covariância da etapa 1, denotada por R1-1. Atribuindo valores iniciais às variáveis de estado e aplicando o processo iterativo do método WLS, as variáveis 𝑥̂(1) podem ser estimadas conforme (3.31.a), onde G1 é a matriz de ganhos dada em (3.31.b) . [74].
Etapa 2 – Pós-Processamento de dados de tensão
Etapa 2 – Pós-Processamento de dados de tensão e corrente
Observe que a matriz de covariância do erro de estimativa de estado 𝑊𝑥̂. 2) na equação (3.36) é definido para o vetor de estado em coordenadas retangulares. Como a estimativa de estado é avaliada em termos de módulos e ângulos, a matriz de covariância é transformada para sua forma polar, (𝑊𝑥̂. 2) inclui a variância do módulo de tensão 𝜎|𝑥̂.
CONSIDERAÇÕES FINAIS
Assim, a equação atualizada é agora dada por (3.35) onde 𝑥̂𝑟𝑒𝑡(2) é o vetor de estimativas da Etapa 2 em coordenadas retangulares. A covariância da estimativa global 𝑥̂𝑟𝑒𝑡(2) = [𝑥̂𝑟𝑒𝑎𝑙(2) 𝑥̂𝑖𝑚𝑎𝑔(2) ]𝑇 é dada por uma equação de 3, 36, e pode ser usada pela equação de Gauss, sob 36) certeza da avaliação .
CONSIDERAÇÕES INICIAIS
METODOLOGIA PROPOSTA PARA ESTIMAÇÃO DE ESTADOS
Modelo de Fluxo de Potência Ótimo Modificado (E-OPF)
Qg Qg Limites inferior e superior da variável representativa de potência reativa de saída da barra k. Os limites do balanço de potência ativa e reativa do E-OPF são dados pelas equações (4.4.b) e (4.4.c), respectivamente.
Representação da Carga
Deve-se enfatizar que as restrições de tensão permitem e aceleram a convergência, mesmo para uma única medida de módulo de tensão e ângulo de fase, tornando o E-OPF uma ferramenta robusta para realizar o processo de estimativa de estados de tensão SDE, com poucas medições disponíveis. Portanto, as forças de carga são estimadas dentro de uma faixa determinada pelo seu comportamento histórico.
METODOLOGIA DE PLANEJAMENTO DE MEDIÇÃO – ABORDAGEM
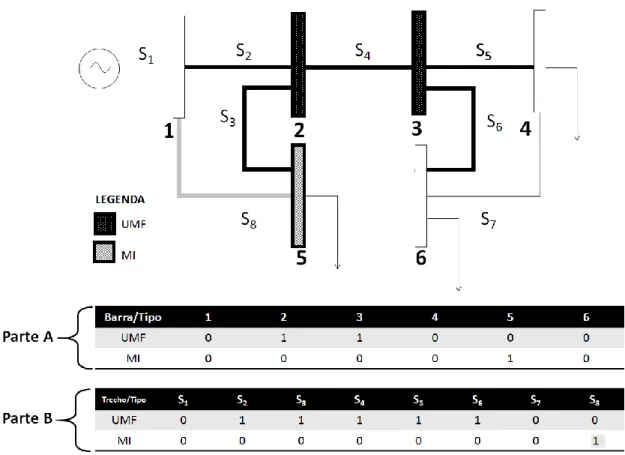
Na ilustração da Figura 4.2, o vetor superior armazena as decisões de investimento em UMF e o vetor inferior em MI. Cada configuração candidata é avaliada usando a função objetivo em (4.8), que inclui a precisão do processo de estimativa de estado e o custo de investimento.
METODOLOGIA DE PLANEJAMENTO DE MEDIÇÃO – ABORDAGEM
- Formulação de um Problema Multiobjetivo
- Conjunto Ótimo de Pareto
- Função de aptidão
- Aplicação do Método de Pareto para o Problema de Planejamento Proposto
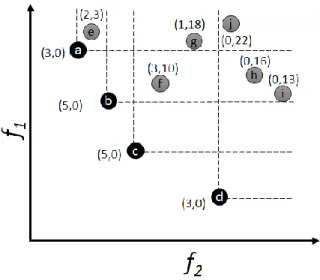
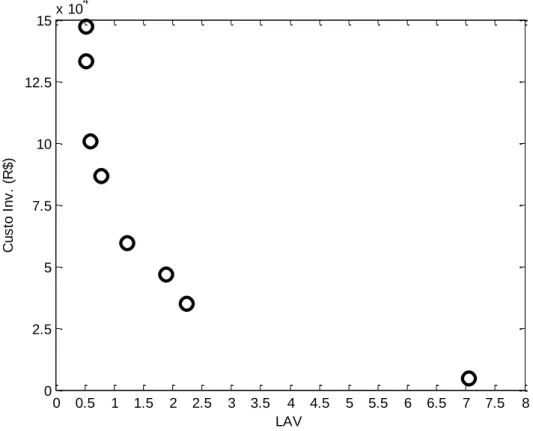
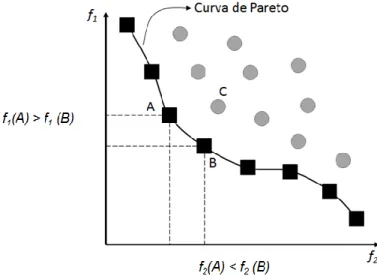
A Figura 4.3 ilustra uma superfície de Pareto para um problema de minimização de função com dois objetivos. Para ilustrar, a Figura 4.5 mostra uma curva de Pareto do tipo (Min x Min) para duas funções objetivo f1 e f2, onde algumas soluções são representadas por pares ordenados codificados como (forcai, sforcai).
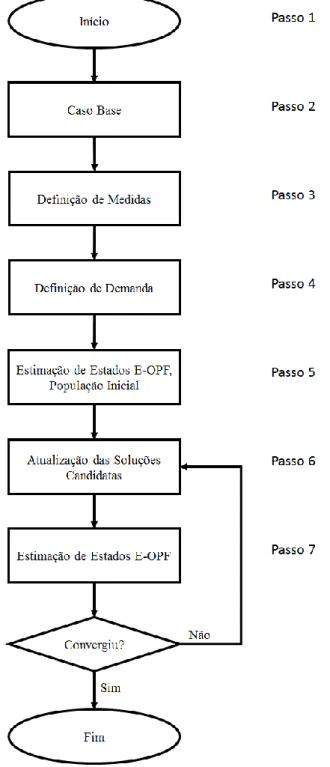
FLUXOGRAMA DA METODOLOGIA DE PLANEJAMENTO PROPOSTA
Na abordagem multiobjetivo, a melhor solução candidata não dominada da árvore MMS inicial, referente à população inicial de soluções candidatas, é determinada com base na função de aptidão da equação (4.16). A evolução da solução candidata não dominada através da geração de novos candidatos conforme mencionado é governada pela função de aptidão na equação (4.16).
SISTEMA TUTORIAL
A matriz A começa vazia enquanto a matriz P armazena as soluções da Tabela 4.3, mas codificada conforme mostrado na Figura 4.2. A Tabela 4.7 apresenta os valores da função de aptidão, formulada na equação (4.16), para as soluções candidatas incluídas na matriz A.
CONSIDERAÇÕES FINAIS
CONSIDERAÇÕES INICIAIS
Além disso, para fins de validação do E-OPF proposto, os resultados obtidos pelo novo método, nas mesmas condições de cada simulação, são comparados com os de outra técnica de estimação de estado já consolidada na literatura, o método dos Pesos Mínimos Quadrados. desenvolvido para esse fim nesta tese. A influência da localização dos sistemas de medição é avaliada através de uma técnica de alocação Exhaustive Search (BE), vinculada ao E-OPF, envolvendo o UMF como opção de investimento.
SISTEMA DE 14 BARRAS
Sistema 14 barras, Condição 1
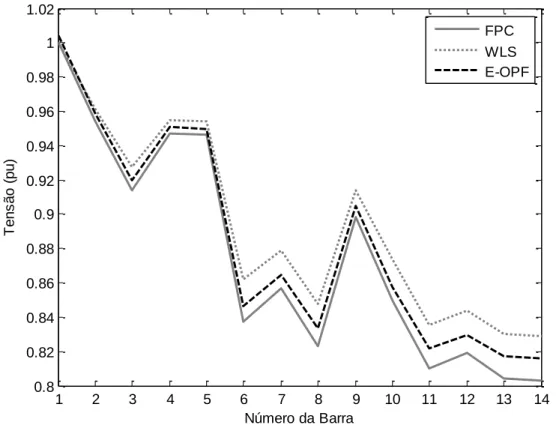
A Tabela 5.2 apresenta os valores máximo, mínimo e médio de FOB definidos pela ligação de DEE e LAV, equação (4.4.a), obtidos nestas simulações. Porém, os valores estimados pelo E-OPF estão mais próximos dos valores exatos do FPC em comparação ao estimador WLS, o que comprova a eficácia do método proposto.
Sistema 14 barras, Condição 2
- Condição 2.1 - Minimização do índice DEE
- Condição 2.2 - Minimização da FOB constituída de DEE e LAV
Avaliando as soluções da Tabela 5.4 e Tabela 5.5, observa-se que embora o DEE seja um pouco mais eficiente na condição 2.1 do que na condição 2.2, os índices baseados em LOW são muito superiores na condição 2.1 do que na condição 2.2, garantindo um FOB maior para a condição 2.1, ou seja, com qualidade inferior, pois o objetivo é minimizar o FOB. Como resultado, a condição 2.2 apresenta melhor equilíbrio entre os objetivos DEE e LAV e, portanto, favorece um FOB menor, ou seja, com maior qualidade.
Sistema 14 barras, Condição 3
O E-OPF deve ser capaz de estimar a condição da rede para todas as configurações com base nas medições fornecidas pelas unidades de medição fasorial atribuídas no sistema. Pode-se observar na Tabela 5.8 que mesmo analisando de forma desacoplada, ou seja, determinando o ponto de alocação ótimo para uma determinada topologia do sistema analisado e utilizando-o para outras topologias, constatou-se que há uma redução para todos os FOBs era.
SISTEMA DE 33 BARRAS
Sistema 33 barras, Condição 1
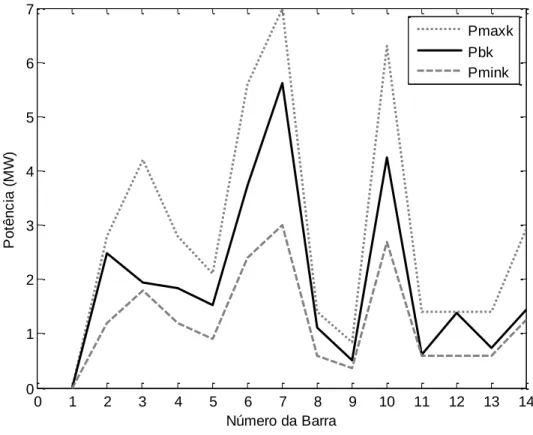
É importante ressaltar que, assim como no sistema de 14 barras, os valores relativos às exigências de carga ativa e reativa servem para avaliar o desempenho do método obtido através do ponto de operação aleatório (Pbk) em uma faixa historicamente definida. com limites (Plmaxk e Plmink) como pode ser visto na Figura 5.10. A Figura 5.12 e a Figura 5.13 mostram o módulo de tensão e o ângulo de fase por barra obtidos por FPC (valores reais) e estimados pelos algoritmos E-OPF e WLS.
Sistema 33 barras, Condição 2
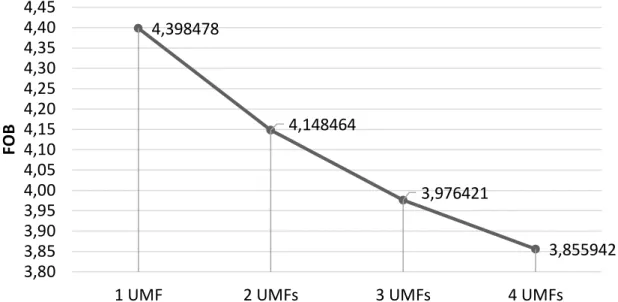
Pode-se observar que o E-OPF resultou na estimativa e nos índices FOB mais baixos em comparação ao WLS também para este sistema, confirmando a eficácia do método proposto sob condições de baixa redundância de medição. A Figura 5.15 mostra o número de simulações E-OPF exigidas pelo processo BE para encontrar as melhores soluções para partição e unidades de medida '4'.
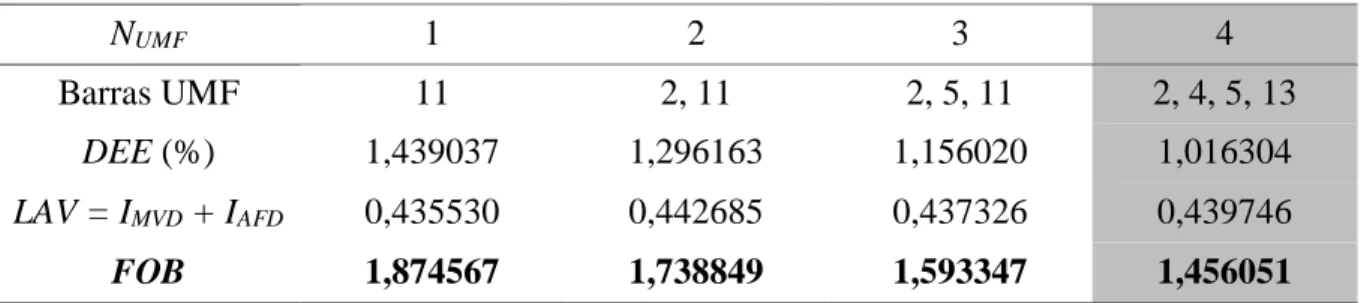
Sistema 33 barras, Condição 3
Embora a redução para as duas topologias adicionais não seja tão significativa, de acordo com os valores da Tabela 5.15, ainda é válida, uma vez que a alocação utilizada teve como objetivo otimizar a configuração original. Em comparação com a Tabela 5.14 para uma única UMF, os resultados da Tabela 5.15 para quatro unidades são melhores, como esperado devido ao aumento da redundância dos medidores.
CONSIDERAÇÕES FINAIS
Pode-se observar na Tabela 5.15 que o desempenho do estimador E-OPF não é significativamente afetado pelas mudanças topológicas consideradas, o que indica sua robustez e aplicabilidade em SDE com recursos operacionais. Para tanto, medidores inteligentes e unidades de medição de fase são considerados opções de investimento para a metodologia proposta, que visa maximizar o desempenho do processo de avaliação de condição com o menor custo de aquisição.
RESULTADOS PARA O MODELO DE PLANEJAMENTO MONO-OBJETIVO
Sistema 33 barras, Análise A
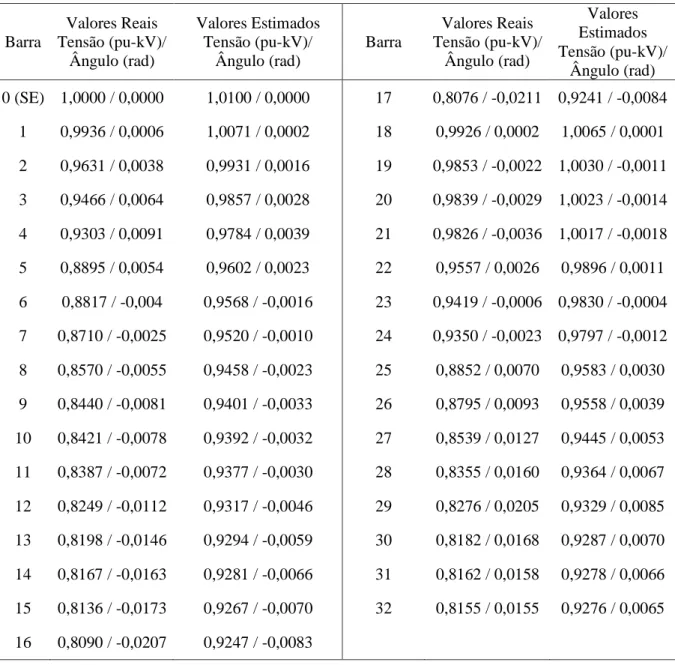
A Tabela 6.1 apresenta os valores reais das variáveis de estado obtidas a partir da solução convencional de fluxo de potência, juntamente com os valores estimados utilizando apenas pseudomedições e medições do SE, ou seja, sem alocação de equipamentos adicionais. como UMF ou MI. Por outro lado, se for alocado apenas o MI, mesmo em todas as faixas, os índices de avaliação aumentam, aumentando o FOB, em relação ao ponto ótimo da tabela 6.3, devido à menor acurácia do MI em relação ao UMF.
Sistema 33 barras, Análise B
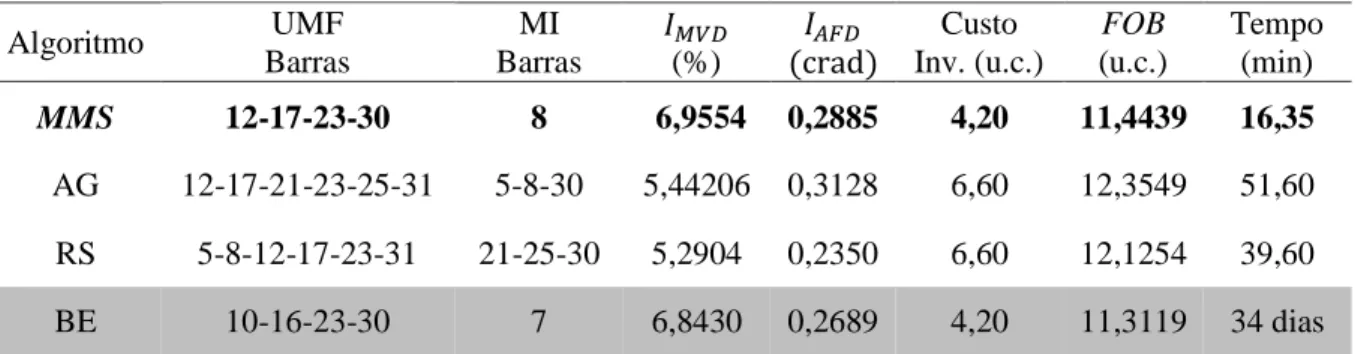
Já na Tabela 6.5, percebe-se que a distribuição de UMF e/ou MI apenas nos terminais alimentadores também não é a melhor alternativa, pois os melhores resultados obtidos na Tabela 6.3 (MMS e BE) apresentam valores mais elevados FOBs pequenos e determinar a separação de uma UMF na faixa '8' (no meio do alimentador) e nas faixas '30', próximo ao final do alimentador, mas não exatamente no final dele. A Tabela 6.7 apresenta os melhores resultados obtidos a partir da metaheurística proposta, das técnicas utilizadas como comparação e do procedimento Exhaustive Search (BE).
RESULTADOS PARA O MODELO DE PLANEJAMENTO MONO-OBJETIVO E
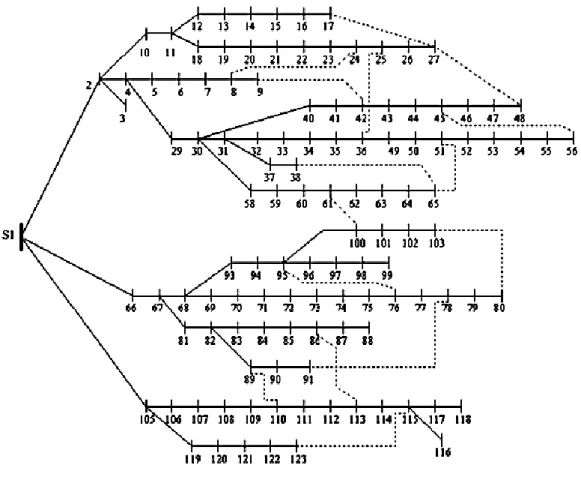
Sistema de 119 barras
A Tabela 6.8 apresenta os resultados obtidos nas simulações das etapas (a) e (b) para definição dos parâmetros α, β e γ, conforme descrito anteriormente. A Tabela 6.10 apresenta os resultados obtidos pelo algoritmo MMS proposto e outras metaheurísticas desenvolvidas para fins de comparação envolvendo parâmetros FOB e tempo de cálculo.
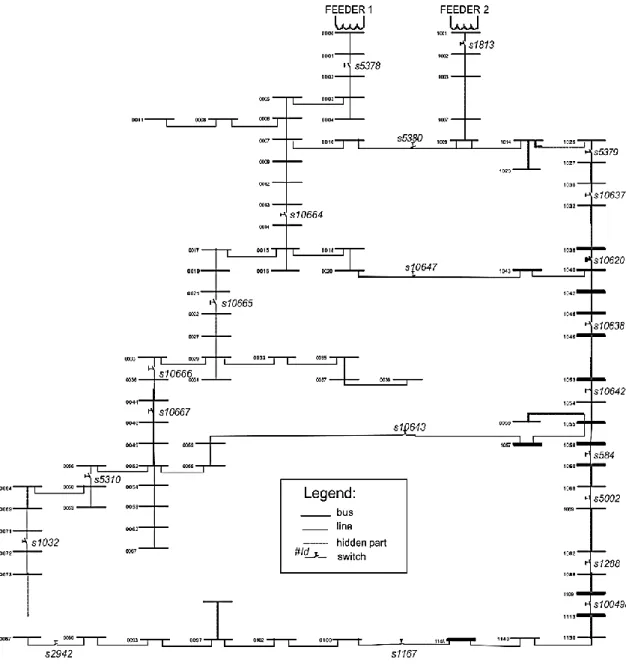
Sistema de 476 barras
Pode-se observar pelos resultados da Tabela 6.10 que a alocação estabelecida pelas ferramentas de busca MMS, AG e RS possui um número maior de MIs alocados do que UMFs, ou seja, é alocado um número maior de IMs que uma decisão da UMF implicaria em canais ociosos, dada a condição monofásica do sistema de distribuição. Esta configuração do medidor permite a medição de correntes em seis seções, sendo quatro delas monitoradas pelo P600 e duas pelo PQ700, conforme Tabela 6.10.
RESULTADOS PARA O MODELO DE PLANEJAMENTO MULTIOBJETIVO
Planejamento Multiobjetivo - sistema de 119 barras
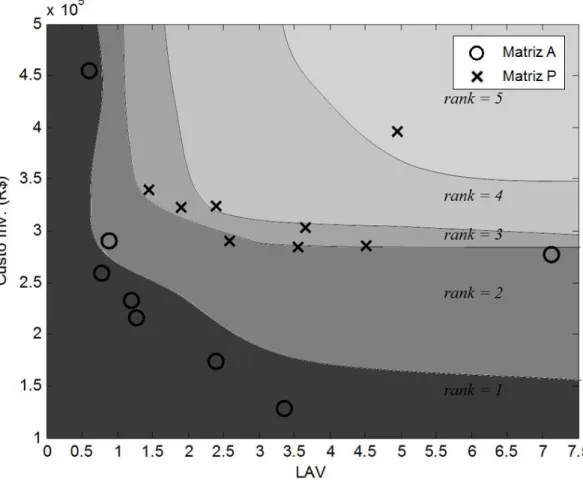
Os valores “%” referentes à segunda coluna da Tabela 6.15 representam o impacto em termos de desempenho do estimador comparado ao caso base do sistema, ou seja, o LAV frente aos dados da Tabela 6.8. A escolha da solução da Tabela 6.15 está diretamente relacionada ao orçamento disponível da concessionária e ao desempenho do avaliador.
Planejamento Multiobjetivo - sistema de 476 barras
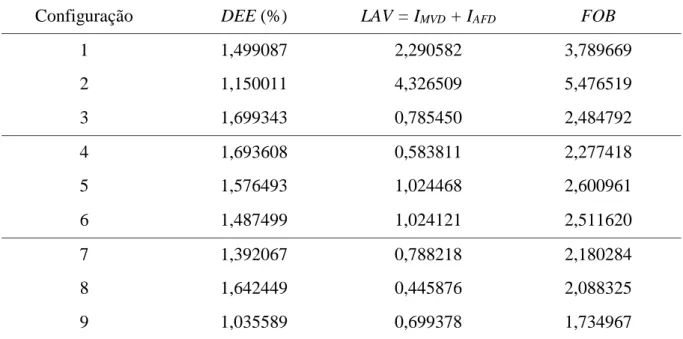
A escolha da solução da Tabela 6.18 está diretamente ligada ao orçamento disponível da concessionária e ao desempenho do estimador. Vale ressaltar que as soluções ‘6’, ‘7’ e ‘8’ da Tabela 6.18 são descartadas como opções de investimento por não possuírem relação de compromisso e pertencerem à fronteira de Pareto 2.
CONSIDERAÇÕES FINAIS
CONSIDERAÇÕES FINAIS
A técnica MMS-Pareto proposta mostrou-se eficiente em termos de qualidade das soluções obtidas e tempos de processamento para o problema de escalonamento descrito nesta tese, mesmo considerando a complexidade decorrente das condições reais de operação consideradas, sistemas reais e equipamentos comerciais. Estudos de caso envolvendo um sistema real de médio porte comprovam a aplicabilidade da metodologia proposta e seu potencial para geração de planos alternativos para o problema de planejamento de medição.
PROPOSTA DE CONTINUIDADE
CONSIDERAÇÕES INICIAIS
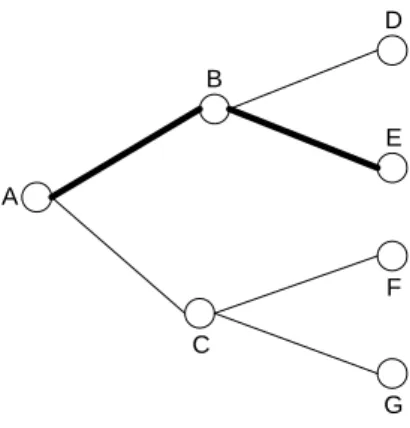
A partir da memória de referência formada na árvore inicial, o algoritmo de otimização realiza uma varredura direcionada nas árvores subsequentes, evitando o processo de busca em todos os caminhos e acelerando o exame dessas árvores até que seja encontrado um critério de convergência, que será explicado posteriormente. Os principais aspectos do algoritmo MMS, incluindo definição de parâmetros, critérios de convergência e mecanismos de perturbação da solução, são discutidos abaixo.
PARÂMETROS DA ÁRVORE INICIAL
Destes aspectos, para escolher um valor de h adequado para cada problema específico, existe um compromisso entre a qualidade da solução e os requisitos computacionais. Por exemplo, quando o parâmetro h é escolhido, o parâmetro c é uma função de h conforme mostrado na equação (A.1).
MEMÓRIA ADAPTATIVA
Nota-se que o processo de atualização de memória não se limita a soluções melhores que m1,m1. Esta estratégia de atualização permite uma convergência mais rápida do algoritmo e consequentemente aumenta sua eficiência computacional em comparação com o MS proposto em [119] e [120], que limitam o processo de atualização a soluções melhores que m1,m1.
MECANISMO DE PERTURBAÇÃO DA SOLUÇÃO
De acordo com a Tabela A.1, a solução dada por m1,m1 após pesquisar na árvore m1 verifica que as hastes 1, 2, 6 e 8 possuem equipamento de medição. Assim, para o caso em questão, o incremento máximo possível para o resultado da solução inicial da Tabela A.1 é ninc e ndec = 4.

CONVERGÊNCIA
PROCESSO DE INTENSIFICAÇÃO
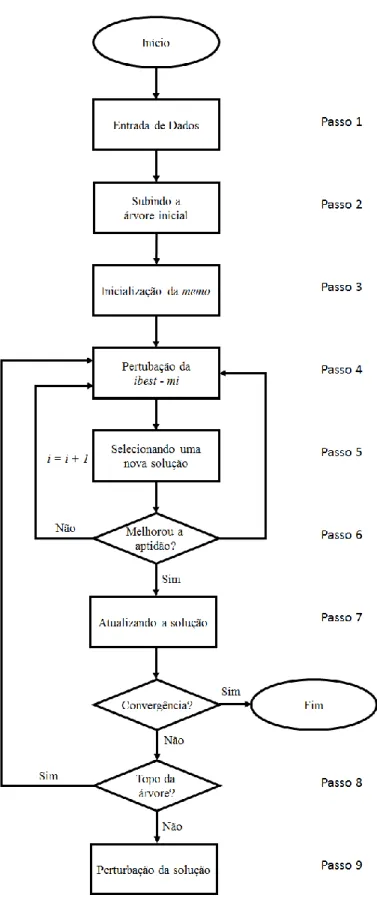
FLUXOGRAMA DO ALGORITMO PROPOSTO DO MMS
Avaliação da nova solução atual escolhida no passo 5. i) se a solução escolhida representar melhor qualidade que "ibest", esta solução substitui "ibest" e a convergência da mi-tree é alcançada, caso em que o contador i é incrementado . e uma nova árvore, ela começa a ser explorada a partir do Passo 4; (ii) caso contrário, a memória adaptativa é atualizada se a nova solução atual for melhor que pelo menos uma solução do memorando, caso em que o algoritmo vai para a etapa 7. Caso contrário, se o pico não for atingido, o algoritmo permanece no processo ascendente na etapa 9 .
MÉTODO DE RESOLUÇÃO DO PROBLEMA DE OTIMIZAÇÃO E-OPF
MÉTODO PRIMAL-DUAL DOS PONTOS INTERIORES
9th International Conference on Electrical Energy Quality and Use, 1 –4. Placement of measurements when estimating the condition of the distribution system. Robust dynamic state estimation of power systems based on M-estimation and realistic system dynamics modeling.