PROJETO DE ESTABILIZADORES PARA SISTEMAS DE ENERGIA ELÉTRICA USANDO CONTROLE DE VARIÂNCIA MÍNIMA NO ESPAÇO DE ESTADOS. Projeto de estabilizadores para sistemas elétricos de potência utilizando controle preditivo de mínima variância em espaço de estados / Luís Augusto Mesquita de Castro.
Justificativa do Trabalho
O controlador GMV é um dos membros mais simples da família MBPC (Model Based Predictive Control). A aplicação desta estratégia de controle em sistemas de potência para a síntese de ESPs preditivos e a avaliação do desempenho e robustez do estabilizador convencional e preditivo proposto é realizada através de simulações numéricas utilizando uma máquina síncrona - sistema barramento infinito.
Revisão Bibliográfica
Em Cunha (2016), um controlador de amortecimento robusto é projetado para ser aplicado a um sistema de potência sujeito a incertezas paramétricas. Estudos comparativos entre o estabilizador forte e o estabilizador convencional são realizados utilizando simulação numérica para comprovar as vantagens da utilização de estabilizadores fortes no sistema de potência.
Objetivo da Pesquisa
Em Tretini (2017) é apresentada uma nova abordagem para amortecimento de oscilações de baixa frequência em sistemas elétricos de potência, diferentemente da solução atual através do ESP, ela é baseada no controlador da turbina. O Controlador Preditivo de Horizonte Irrestrito, ou UHPC, é um controlador de estado que é simultaneamente estocástico, de longo alcance e computacionalmente leve, trazendo contribuições sem precedentes para os campos de sistemas de energia elétrica e teoria de controle linear.
Organização do Trabalho
Introdução
Um modelo linear bem conhecido para investigar o problema de estabilidade de sistemas de potência é o chamado modelo de Heffron e Phillips (1952). As constantes a são funções do estado operacional do EES e da carga, exceto , que depende dos parâmetros físicos da máquina síncrona e da linha de transmissão (função da relação de impedância da rede elétrica).

Modos de Oscilação
Sistemas de Excitação e Reguladores Automáticos de Tensão
Em resumo, o sistema de excitação deve ajudar a controlar a tensão e melhorar a estabilidade do sistema de potência, responder rapidamente a uma grande perturbação (estabilidade transitória), bem como modular a excitação do campo do gerador (estabilidade de pequenos sinais) (KUNDUR, 1994)). Portanto, quando se deseja representar um sistema de excitação em computadores, deve-se utilizar um dos quatro tipos de configurações disponíveis.
Estabilizadores de Sistemas de Potência
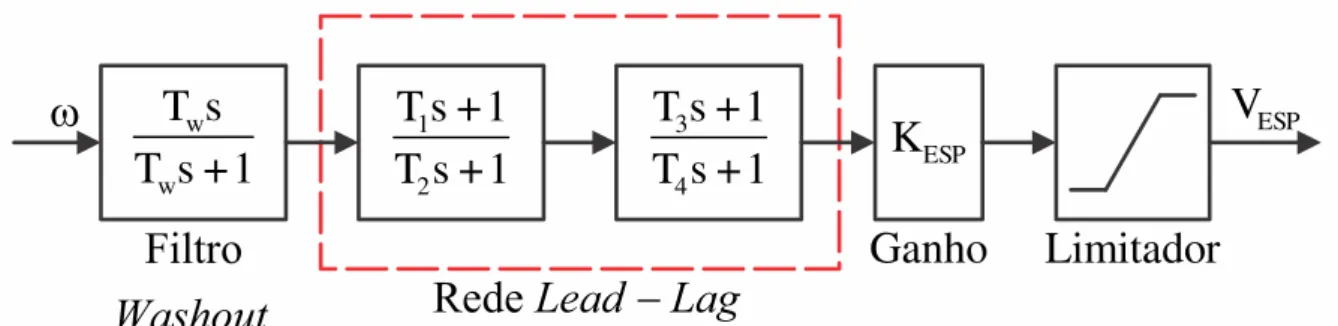
A solução encontrada para superar este problema consiste em aplicar um sinal adicional ao sistema de excitação, proveniente dos estabilizadores do sistema de potência. Esta função de transferência depende dos parâmetros físicos da máquina síncrona e de seus controladores, bem como do ponto de operação do sistema de potência.

Modelagem Dinâmica do Sistema de Potência
Como a faixa de frequência de interesse está entre, Hz e, Hz, o compensador de atraso deve compensar a fase dentro desta faixa de frequência. Esta característica de fase, que deve ser compensada, muda conforme as diferentes condições de operação do sistema, e o ESP deve ser projetado para operar apenas dentro da faixa de frequência desejada. Também é necessário utilizar um filtro washout, que possui uma constante de tempo na faixa de segundos, para evitar que variações permanentes de velocidade afetem a tensão terminal da máquina síncrona.
Conclusão
Tensões, correntes, resistências e reatâncias são expressas em pu, e as constantes de tempo são expressas em segundos.
Introdução
Modelagem de Sistemas Discretos
O algoritmo de controle é implementado por meio de uma linguagem de programação e executado periodicamente pelo computador (ou microcontrolador). Onde � é um sinal de ruído branco (sequência aleatória e não correlacionada com média zero), é usado para representar esta perturbação (ASTRÖM e WITTENMARK, 2008; . ASTRÖM e WITTENMARK, 2011). É importante destacar que como se deseja utilizar métodos de controle digital aplicados a sistemas contínuos, o modelo equivalente discreto da planta, dado pela Equação 3.2 e Equação 3.6, deve corresponder à seguradora de ordem zero que está em série com o real conjunto de plantas. do sistema.
Conceitos Básicos sobre Identificação de Sistemas
Na literatura de identificação de sistemas, é bastante comum referir-se à segunda estrutura como um sistema do tipo ARMAX (Auto-Regressive Moving Average with eXogenous Input). Para a primeira estrutura, o método de identificação que dá resultados satisfatórios é o método dos mínimos quadrados tradicionais (LMS), e para o segundo caso deve ser utilizado o método dos mínimos quadrados estendidos (MQE), que impede a estimativa dos parâmetros do estrutura selecionada. o modelo é tendencioso (LANDAU, 1990; ASTRÖM e WITTENMARK, 2008; AGUIRRE, 2015; COELHO, 2016).
Controle GMV
Na saída generalizada � na equação 3.09, os dados futuros do conjunto de referência, + , são considerados conhecidos a priori, mas + não está disponível. O problema do Preditor de Variância Mínima (MVP) para o caso específico do controlador GMV com ordem mínima avança o sistema ARMAX descrito na Equação 3.08. Conforme apresentado por Aström e Wittenmark (1973) e Clarke e Gawthrop (1975), uma das formas é a solução da identidade polinomial apresentada na equação 3.18, referida como equação Diofantina.
Controle GMVSS
O projeto do controlador GMVSS começa com uma representação ARMAX em espaço de estados do tipo: . O próprio MVP no espaço de estados apresentado na Equação 3.39 preserva alguma forma de solução analítica da equação Diofantina usada no projeto através das funções de transferência do controlador GMV apresentadas na Equação 3.18. O procedimento de projeto do MVP no espaço de estados fornece naturalmente um algoritmo para resolver a equação Diofantina para o controlador GMV no caso clássico via funções de transferência (SILVEIRA, 2012).
Controlador GMVSS na Topologia Canônica RST de Controlador
Lembre-se que os controladores GMV e GMVSS possuem leis de controle idênticas, diferindo apenas no método de projeto, pois o método de projeto do controlador GMVSS é simplificado em comparação com o método de projeto do controlador GMV, uma vez que a equação Diofantina é inerentemente resolvida pelo MVP no espaço de estados, que não ocorre no MVP devido a uma função de transferência, e o trabalho do projetista da malha de controle é encontrar sua solução correta. Os polinômios − e − são fornecidos pelo modelo ARMAX da planta (equação 3.08), enquanto os polinômios − e − vêm da solução da equação Diofantina (equação 3.18). A capacidade de obter o controlador GMVSS na forma canônica RST permite a análise de robustez da malha de controle.

Funções de Sensibilidade
As taxas máximas de ganho das funções de sensibilidade e sensibilidade complementar fornecem medidas úteis de robustez da malha de controle. Essas medições também são utilizadas como critérios de projeto de sistemas de controle (DOYLE et al., 1990). O valor máximo leva em consideração a influência da referência na malha de controle e corresponde ao pico de ressonância, que geralmente deve ser mantido pequeno.
Conclusão
As opções de margem de ganho e margem de fase também refletem a qualidade do modelo e a variabilidade esperada da planta.
Introdução
Identificação do Modelo da Planta
Os parâmetros do modelo de 4ª ordem identificados via RLS (Recursive Least Squares) para um intervalo de tempo de 2 mil segundos (uma janela de 50 mil dados) são apresentados na Tabela 3, enquanto os pólos e zeros do modelo linear podem ser vistos na Tabela 4. A Figura 4.4 mostra a localização no plano z dos pólos e zeros do modelo de 4ª ordem identificado, enquanto a Figura 4.5 mostra sua resposta ao impulso, e o modo de oscilação dominante do sistema pode ser visto a partir da potência que ser estudado. Portanto, pode-se concluir que a utilização do modelo ARMAX de 4ª ordem é suficiente para capturar informações sobre o modo de oscilação dominante da planta.

Simulações Não Lineares
Caso 1
Para o teste (a), o ESP preditivo apresenta desempenho inferior, mas muito semelhante ao ESP convencional de parâmetro fixo, uma vez que este ponto de operação foi utilizado para o projeto do ESP convencional, conforme visto na Figura 4.7 e Figura 4.8. Além disso, o ESP preditivo apresenta desempenho superior ao ESP convencional em parâmetros fixos para amortecimento de oscilações eletromecânicas causadas por uma grande perturbação que levou a uma mudança nas condições de operação do sistema, conforme visto na Figura 4.9 e Figura 4.10. Para o teste (c), o ESP preditivo também apresenta desempenho superior comparado ao desempenho do ESP convencional em parâmetros fixos através de uma perturbação promovida pela mudança na tensão terminal de referência do gerador, com ambos conseguindo amortecimento suficiente das oscilações pós-falta , conforme visto na Figura 4.11 e figura 4.12.

Caso 2
As Tabelas 6 e 7 mostram os índices de desempenho calculados pela Equação 4.23, Equação 4.24 e Equação 4.25 para a malha de controle para os diversos testes aos quais o sistema foi submetido em dois pontos de operação diferentes. A Tabela 8 mostra os índices de desempenho global calculados pela Equação 4.23, Equação 4.24 e Equação 4.25 para a malha de controle para o Caso 1 e Caso 2. A Figura 4.19 mostra os resultados de diferentes ajustes para o estabilizador preditivo para o mesmo número de previsões futuras ( = ) e diferentes pesos de controle e .
Análise de Robustez
A Tabela 9 apresenta os valores máximos e limites do ganho e fase da malha de controle quando controlada pelo estabilizador convencional ou pelo estabilizador preditivo proposto. A resposta de frequência para os sistemas de malha aberta e de malha fechada, bem como as funções de sensibilidade da malha de controle quando controlada pelo estabilizador convencional ou pelo estabilizador preditivo proposto, são apresentadas na Figura 4.20 e na Figura 4.21. A Figura 4.24 mostra o resultado do diagrama de Nyquist do sistema de controle quando ele é controlado tanto pelo estabilizador convencional quanto pelo estabilizador preditivo proposto.

Conclusão
Sistemas de controle com altos valores de GM suportam mudanças paramétricas maiores, antes de atingirem instabilidade em malha fechada (ARAÚJO, 2017). Além disso, com base na análise de robustez apresentada tanto pelo diagrama de Bode das funções de sensibilidade quanto pelo diagrama de Nyquist do sistema de controle, constatou-se que o ESP preditivo proporciona maiores margens de ganho e fase ao sistema de controle em comparação ao ESP convencional, aumentando assim das margens de estabilidade operacional do sistema elétrico. Neste trabalho foram apresentados os resultados obtidos utilizando um método de controle preditivo para o projeto de um estabilizador de sistema de potência, com o objetivo de melhorar o amortecimento dos modos eletromecânicos em sistemas elétricos de potência.
Simulações numéricas em um sistema de controle utilizando o método de mínima variância generalizada em espaço de estados foram realizadas em um modelo não linear de uma máquina síncrona – sistema barramento infinito, onde o desempenho do estabilizador proposto foi mais satisfatório que o desempenho observado pelo estabilizador convencional para os casos apresentados. Desenvolvimento e implementação de estratégias de controle digital para regulação de tensão e amortecimento de vibrações eletromecânicas em gerador síncrono de 10 kVA.