Dada a capacidade de oferecer soluções aceitáveis em tempo hábil para muitos dos problemas complexos encontrados, as metaheurísticas populacionais têm sido aplicadas com sucesso a vários problemas de sistemas de controle encontrados na literatura. Como muitos dos problemas de controle encontrados na literatura podem ser transformados em um problema de otimização, as metaheurísticas populacionais têm sido aplicadas com sucesso a muitos desses problemas (TARIQUE et al, 2013; VIDAL et al, 2015; CHANG & . SHIH, 2010; RAJINIKANTH & LATHA, 2012; LATHA et al, 2013.
O BJETIVOS
Os métodos heurísticos propostos por Ziegler-Nichols são um dos mais utilizados nestes casos e oferecem bons valores de parâmetros, mas muitas vezes impõem características específicas para sua utilização na parametrização. Na literatura são propostos diferentes métodos de utilização de metaheurísticas populacionais para sintonia de controladores PI e PID modificados para uso no controle dos mais diferentes tipos de sistemas (PERREIRA, 2008;.
E STRUTURA DO TRABALHO
I NTRODUÇÃO
Esses métodos definem critérios para a transição de uma solução para outra, ou para a construção ou destruição de soluções em processos construtivos e destrutivos (GLOVER & KOCHENBERG, 2008). Os AGs implementam operadores que permitem a troca de material genético entre um indivíduo-solução e outros, o que significa que os indivíduos mais aptos podem gerar novos descendentes que tendem a misturar as boas características de seus ancestrais.
A LGORITMO G ENÉTICO (AG)
- Histórico dos Algoritmos Genéticos
- Características dos Algoritmos Genéticos
- Seleção dos Pais
- Operador de Crossover
- Mutação
- Elitismo
O operador de cruzamento funciona dividindo o cromossomo dos pais em um ou mais pontos de corte, de modo que os filhos sejam formados a partir da combinação dessas peças. Cruzamento de dois pontos: Ao contrário do operador de um ponto, dois pontos de corte são escolhidos e as partes principais são mescladas para formar as partes secundárias.

P ARTICLE S WARM O PTIMIZATION (PSO)
Inteligência de Enxame
O ato de elitismo visa garantir que o melhor indivíduo encontrado na próxima geração tenha sempre uma avaliação igual ou superior ao melhor indivíduo da geração anterior, pois quando são realizados os operadores de cruzamento e mutação, existe a chance de os filhos gerado terá uma classificação mais baixa ou que o melhor indivíduo não seja selecionado para produzir descendentes. O elitismo faz com que uma cópia exata do melhor indivíduo seja passada para a próxima geração (LIDEN, 2006; MICHALEWICZ, 1992). Assim, quando esses grupos de seres vivos resolvem problemas na natureza, essa habilidade geralmente é atribuída à “inteligência” do grupo.
Características do PSO padrão
As partículas integram dois tipos de aquisição de conhecimento para se mover no espaço de busca. A primeira é através da sua experiência e a outra é através do compartilhamento social de informações com outros membros do enxame. Para evitar extrapolações a cada atualização das velocidades de cada partícula, um valor de velocidade máxima e um valor de velocidade mínimo são limitados.
Considerações sobre o PSO
B ACTERIAL F ORAGING O PTIMIZATION (BFO)
Comportamento de forrageio bacteriano
Coli se reproduzirá e a população aumentará, mas quando estiver presente em um ambiente pobre em nutrientes, tenderá a se deslocar para outro ambiente mais produtivo, se não conseguir localizá-lo não conseguirá se reproduzir e acabará morrer (BERG, 2000); .XING & GAO, 2014).
Características do algoritmo BFO
Reprodução: Após (número máximo de etapas de quimiotaxia) iterações de quimiotaxia, as etapas de reprodução devem ser executadas. Eliminação de dispersão: Com o objetivo de evitar pontos ótimos locais, o processo de dispersão e eliminação é implementado após (número máximo de etapas de reprodução) interações de reprodução. De acordo com uma probabilidade ( ), uma bactéria é escolhida para ser dispersada e movida para outra posição no ambiente, o número máximo de etapas de Dispersão-Eliminação é definido pelo parâmetro .
E STADO DA ARTE DE METAHEURÍSTICAS POPULACIONAIS APLICADAS À S ISTEMAS DE C ONTROLE
Em (SINGH et al, 2015), o Algoritmo Bat (BA) é utilizado para definir os parâmetros de um controlador PID para controlar a posição de um servo motor. O trabalho de (IBRAHIM et al, 2014) utiliza os algoritmos PSO e BFO para determinar os parâmetros ótimos de um controlador PID para controle de velocidade de motores CC. No trabalho de (GAO et al, 2009) é proposto um framework para identificação de sistemas de potência que se baseia na utilização de um Algoritmo Genético.
I NTRODUÇÃO
Ajustando seus parâmetros, podem ser obtidas respostas com boas propriedades transitórias e de estado estacionário da maioria dos sistemas dinâmicos. Dado que a maioria dos controladores PID são ajustados no ponto de uso, diferentes tipos de técnicas para ajuste de seus parâmetros são propostos na literatura. Uma das vantagens destes métodos é que eles são aplicáveis à maioria dos sistemas da indústria e são relativamente fáceis de implementar.
A ÇÕES DE CONTROLE PID
A ação de controle proporcional tende a estabilizar o sistema, enquanto a ação de controle integral tende a eliminar o erro em estado estacionário (CHEN, 1995; OGATA, 2003). Ação de controle proporcional-derivativo (PD): Neste caso, o sinal de controle que atua em um sistema é proporcional ao erro e ao erro derivado. A ação de controle derivativo, quando adicionada a um controlador proporcional, fornece um meio de obter um controlador altamente sensível.
S INTONIA DE C ONTROLADORES PID
Métodos Tradicionais para ajuste dos Parâmetros do Controlador PID
Outra forma de projetar controladores PID é utilizar o método Root Geometric Locus (LGR), que consiste em um método gráfico para determinar a localização de todos os pólos de malha fechada com base no conhecimento da localização dos pólos de malha aberta e zeros como o valor de um parâmetro (geralmente ganho) varia de zero a infinito. Conhecendo os efeitos da adição de pólos e zeros no LGR, a localização dos pólos e zeros do controlador que resultará no condicionamento de formato do local raiz desejado pode ser determinada adequadamente. Basicamente, no projeto LGR, os lugares das raízes dos sistemas sofrem uma mudança de forma usando um controlador para que um par de pólos dominantes em malha fechada possa ser atribuído à posição desejada.
Índices de Desempenhos
Este índice é utilizado para reduzir a contribuição de grandes erros iniciais para o valor da integral de desempenho, bem como para enfatizar erros que ocorrem posteriormente na resposta (D'AZZO & HOUPS, 1975).
I NTRODUÇÃO
M ETAHEURÍSTICA POPULACIONAL PARA A SINTONIA DOS PARÂMETROS DE UM CONTROLADOR PID
Representação dos indivíduos da população
Estrutura de avaliação dos indivíduos da população
Em seguida, cada vetor de erro para cada indivíduo da população será passado para o algoritmo de ajuste para que possa ser usado para calcular a pontuação de cada indivíduo. Como pode ser visto na função objetivo (estimativa), os indivíduos que contêm os menores valores de erro serão aqueles com o maior valor de estimativa e, portanto, aqueles mais próximos da resposta limitante do projeto.
AG NO M ODELO DE I LHAS (AGMI) PARA A SINTONIA DO PID
Além disso, algumas heurísticas são utilizadas para inicializar a população próxima a regiões onde há maior chance de encontrar os melhores indivíduos (ZALZALA&FLEMING, 1997; KRISHNAKUMAR, 1989). Considerando então a importância do desenvolvimento de AGs baseados em heurísticas para inicializar populações próximas a regiões onde há maior chance de encontrar os melhores indivíduos, em (VIDAL et al, 2015) o AGMI é proposto com base na utilização de três Algoritmos Genéticos. chamados AG1, AG2 e AG3, para busca dos parâmetros do controlador PID. AG1 evolui uma população aleatória ao longo de gerações calculando o erro entre as respostas dos indivíduos e a resposta de projeto desejada apenas no período transitório.
A PLICAÇÃO DE M ETAHEURÍSTICA POPULACIONAL PARA A SINTONIA DOS PARÂMETROS DO PID
Considerações Iniciais
Enquanto o AG2 desenvolve uma população gerada aleatoriamente que apenas compara o erro das respostas do estado estacionário. Assim, os indivíduos do AG1 são levados próximos à região que contém os melhores valores dos ganhos que reduzem o erro no transitório, ou seja, com maior influência no ganho derivado. O AG3 inicia portanto a busca com um bom ponto de partida, pois iniciará a busca em uma região com boa informação genética sobre os parâmetros.
Sistemas de primeira ordem
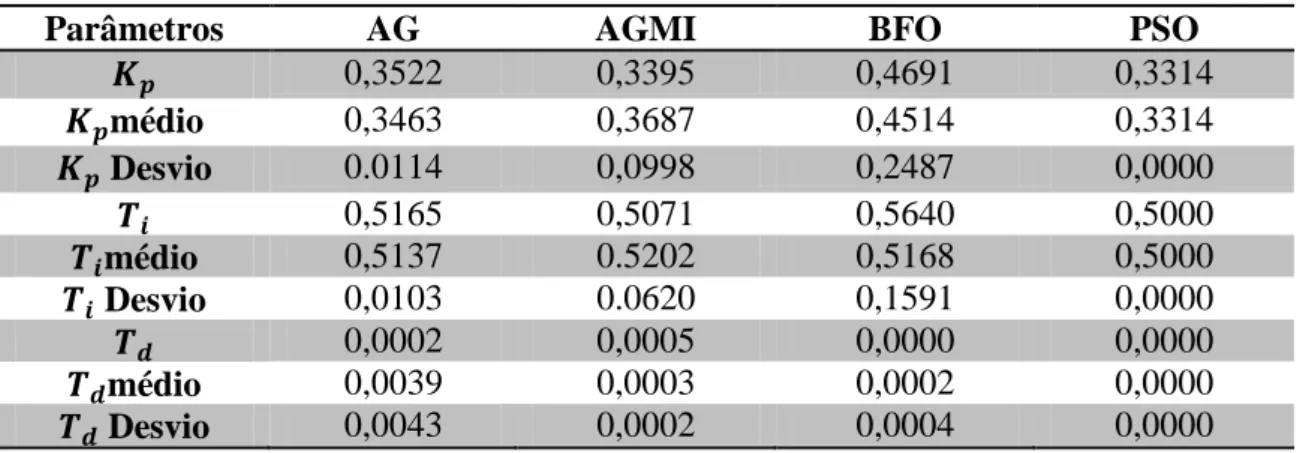
A Tabela 4.5 também contém os valores alcançados para o sistema utilizando cada controlador sintonizado pelos algoritmos AG, AGMI, BFO e PSO. A Tabela 4.9 apresenta os valores pactuados pelos algoritmos e a Tabela 4.10 apresenta os valores dos índices de desempenho obtidos. A Tabela 4.11 apresenta os valores das especificações de projeto e os valores alcançados com cada PID sintonizado com os algoritmos.

Sistema de Segunda Ordem
A Tabela 4.14 contém as especificações do projeto para este exemplo e os valores obtidos utilizando cada controlador sintonizado pelos algoritmos. A Tabela 4.17 apresenta os valores de especificação de projeto para este exemplo bem como os valores obtidos utilizando controladores adaptados pela AG, AGMI, BFO e PSO. A Tabela 4.18 contém os valores dos parâmetros definidos por cada algoritmo, e a Figura 4.21 compara as respostas do sistema usando cada controlador e a resposta limite do projeto.
Sistema de Ordem superior
A Tabela 4.21 apresenta os valores dos parâmetros ajustados por cada algoritmo, e a Figura 4.23 apresenta as respectivas respostas geradas por cada algoritmo. A Tabela 4.22 contém os valores dos índices de cada controlador mostrando que o melhor valor foi obtido pelo AG, seguido de perto pelos demais algoritmos. A Figura 4.24 mostra os sinais de direção, e neste caso também pode ser observado um valor excessivo da ação de direção.

Considerações sobre resultados alcançados
De forma geral, embora todos os algoritmos tenham produzido respostas que atendam aos requisitos de projeto, pode-se considerar que o PSO foi o que obteve o melhor desempenho entre os quatro algoritmos utilizados neste trabalho. Uma comparação de quatro metaheurísticas populacionais foi realizada ao ajustar os parâmetros de um controlador PID visando atender determinadas especificações de projeto impostas aos algoritmos. A metodologia aqui apresentada baseia-se na criação de uma resposta de referência a partir das especificações de projeto, sendo que esta resposta atua como uma resposta limitante de projeto e o algoritmo tem que minimizar o erro entre ela e as respostas de seus indivíduos para produzir respostas mais próximas deste projeto. resposta e, conseqüentemente, respostas que atendam aos requisitos do projeto.
T RABALHOS F UTUROS
Observou-se também que o algoritmo que obteve melhor desempenho para o problema de sintonia foi geralmente a otimização por enxame de partículas seguido do algoritmo genético no modelo de ilha (AGMI). Outro caminho para trabalhos futuros seria o estudo comparativo do ajuste de parâmetros de controladores utilizando metaheurísticas populacionais e os métodos clássicos disponíveis na literatura de sistemas de controle. Aplicação da otimização por enxame de partículas e suas variantes para controladores de fluxo de potência interline e fluxo de potência ideal”.