Projeto de Multi-Atuadores Piezelétrios
Homogêneos e Gradados Utilizando o
Método de Otimização Topológia
Tese apresentada à Esola Politénia
da Universidade de São Paulo para
obtenção do Título de Doutor em
Engenharia Meânia.
Projeto de Multi-Atuadores Piezelétrios
Homogêneos e Gradados Utilizando o
Método de Otimização Topológia
Tese apresentada à Esola Politénia
da Universidade de São Paulo para
obtenção do Título de Doutor em
Engenharia Meânia.
Áreade onentração:
Engenharia de Controle e Automação
Meânia
Orientador:
Prof. Emílio Carlos Nelli Silva
São Paulo, ______ de ____________________ de __________
Assinatura do autor: ________________________
Assinatura do orientador: ________________________
Catalogação-na-publicação
Calixto Carbonari, Ronny
Pro jeto de Multi-A tuadores Piezelétri os Homogêneos e Gradados
Utilizando o Méto do de Otimização T op ológi a / R. Calixto Carbonari, E.
Carlos Nelli Silva -- versão corr. -- São Paulo, 2008.
220 p.
Tese (Doutorado) - Escola Politécnica da Universidade de São Paulo.
Departamento de Engenharia Mecatrônica e de Sistemas Mecânicos.
Aoorientador,Prof. Dr. EmílioCarlosNelliSilva,peladediaçãoeempenho
para a realização desse trabalho. Opapel de orientador, aolongo do doutorado,
emtodos osmomentos, sempreesteve presente.
Ao Prof. Dr. Gláuio H. Paulino, pela olaboração nas publiações dos
artigos,eprinipalmentepeloinentivoemotivaçãoparaodesenvolvimentodeste
trabalho.
Ao Prof. Dr. ShinjiNishiwaki, pela olaboraçãonas publiaçõesdos artigos
e nodesenvolvimentodeste trabalho.
AoPesquisadorDr. GilderNader,pelaimportanteajudanodesenvolvimento
daparte experimentaldesta pesquisa.
À EPUSP (Esola Politénia daUniversidade de São Paulo) por garantir a
estrutura neessária para o desenvolvimentodesta pesquisa.
Ao CNPq (Conselho Naional de Desenvolvimento Cientío e Tenológio)
pelo apoionaneiro deste trabalho, através de bolsade doutorado.
Aos meus amigos de pesquisa Cíero, Luís, Stump, Nishitani, Andres,
Nakasone, Kiyono, Vatanabe e Koga, pelos bons momentos de disussões
ientías enão-ientías.
Aos grandes inentivadores e otimistas, Maro Aurélio Brizzotti Andrade &
Rogério FelipePires.
Aos amigosde afédatarde, Erik,Christian, PolastroI e II,Fausto,Paulo,
Ramon, ...
Eporm,atodosquediretaouindiretamenteontribuíramparaarealização
Mirodispositivospiezelétriostemumavastaapliaçãoemmeâniadepreisão,
omo, por exemplo, manipulação de élulas, miroirurgias, equipamentos
de nanotenologia e prinipalmente em miroeletromeanismos (MEMS). Os
mirodispositivos piezelétrios onsiderados nesta tese essenialmente onsistem
de uma estrutura multi-exível atuada por duas ou mais piezoerâmias, que
geramdesloamentoseforçasemdireçõeseregiõespré-determinadasdodomínio,
ou seja, a estrutura multi-exível atua omo um transformador meânio
ampliando e alterando os desloamentos gerados pelas piezoerâmias nos
movimentosdeatuação. Odesenvolvimentodestesmirodispositivospiezelétrios
em sua grande maioria não utiliza ferramentas sistemátias e genérias.
A omplexidade dos movimentos de atuação torna o desenvolvimento dos
mirodispositivos piezelétrios omplexo, prinipalmente devido ao surgimento
de movimentos indesejados ou aoplados durante a sua atuação. Portanto,
é neessário um método sistemátio e eiente omo o método de otimização
topológia (MOT), que inorpore na sua formulação as prinipais exigênias
de projeto dos mirodispositivos, omo apresentado nesse trabalho. O MOT
implementado é baseado na abordagem CAMD (Distribuição Contínua da
Distribuição de Material), onde as pseudo-densidades são interpoladas nos nós
de ada elemento nito, resultando numa distribuição ontínua de material
no domínio. Um método adjunto foi implementado para o álulo das
sensibilidades. São onsideradas três formulações. A primeira denominada de
MAPs (Multi-Atuadores Piezelétrios) onsidera asregiõespiezoerâmias xas,
otimizando apenas a estrutura multi-exível no domínio de projeto. Nesta
formulação materiais não-piezelétrios (omo, por exemplo, Alumínio) e vazio
são distribuídos no domínio de projeto, mantendo as regiões piezoerâmias
xas e homogêneas. Para validar os resultados obtidos om essa formulação
foramfabriadosprotótiposdenanoposiionadores
XY
,queforamaraterizadosexperimentalmente utilizando ténias de interferometria laser, onsiderando
exitação quasi-estátia. No entanto, essa primeira formulação impõe restrições
no problema, limitando a optimalidade da solução obtida pela otimização
topológia. Assim, surgiuaneessidadede desenvolver umasegunda formulação,
que permite distribuir simultaneamente material não-piezelétrio, piezelétrio e
vazio no domínio de projeto, denominada de LOMPs (Loalização Ótima do
Material Piezelétrio). A formulação dos LOMPs obtém simultaneamente a
loalização do material piezelétrio na estrutura exível otimizada pela OT, e
inlui também uma variável de projeto para determinar o ângulo ótimo entre
as direções de polarização e do ampo elétrio. Nesta formulação omo as
posiçõesdoseletrodosnãosão onheidas,apriori,éutilizadoomoabordagem
apliar um ampo elétrio onstante para determinar a loalização do material
piezelétrio e onseqüentemente dos eletrodos. Finalmente, foi explorado o
oneito de materiaisom gradação funional(MGFs)noprojetodos MAPs. Os
materiais piezelétrios e não-piezelétrios no domínio piezoerâmio dos MAPs,
onjuntamente om a topologia da estrutura multi-exível. Essa formulação
foi estendida para projetar atuadores bilaminares MGFs. Todas as formulações
desenvolvidasutilizamumafunçãomulti-objetivo,quepermiteontrolararigidez
e a exibilidade minimizando o movimento aoplado, de ada movimento de
atuação. Os exemplos numérios são limitados a modelos bi-dimensionais,
utilizando o estado plano de tensões e deformações meânias e elétrias, uma
vez que a grande maioria das apliações dos mirodispositivos piezelétrios são
bi-dimensionais.
Palavras Chave: Nanoposiionadores piezelétrios. Sistemas
Miro-eletromeânio (MEMS). Materiais om Gradação Funional (MGF).
Mirotools oer signiant promise in a wide range of appliations suh as
ell manipulation, mirosurgery, nanotehnology proesses, and many other
elds. The mirotools onsidered in this dotoral thesis essentially onsist of a
multi-exiblestruture atuated by twoormore piezoeramidevies that when
eah piezoerami is atuated, it generates an output displaement and fore
at a speied point of the domain and diretion. The multi-exible struture
ats asamehanialtransformer byamplifyingand hangingthediretionofthe
piezoeramioutputdisplaements. Thus,thedevelopmentofmirotoolsrequires
the design of atuated exible strutures that an perform omplex movements.
Thedevelopmentofthesemirotoolsisstillinthebeginninganditanbestrongly
enhaned by using designtools. In addition,whenmultiplepiezoeramidevies
are involved, oupling eets in their movements beome ritial, espeially
the appearane of undesired movements, whih makes the design task very
omplex. One way to avoid suh undesirable eets is the use of a systemati
design method, suh as topology optimization, with appropriate formulation
of the optimization problem. The topology optimization method implemented
is based on the CAMD (Continuous Approximation of Material Distribution)
approah where titious densities are interpolated at eah nite element,
providing a ontinuum material distribution in the domain. The orresponding
sensitivity analysis is presented using the adjoint method. Three formulations
are onsidered. The rst formulation, alled Piezoeletri Multi-Atuators
(PMAs), keeps xed piezoerami positions in the design domain and only the
exible struture is designed by distributing some non-piezoeletri material
(Aluminum, for example).
XY
Piezoeletri Nanopositioner are manufaturedand experimentallyanalyzedto validatethe results of the topologyoptimization
obtained using this formulation. Experimental analyses are onduted using
laser interferometry to measure displaement, while onsidering a quasi-stati
exitation. However, this rst formulation imposes a onstraint to the position
of piezoeletri material in the optimization problem limiting the optimality of
the solution. Thus, the seond formulation presented, alled LOMPs, allows
the simultaneous distribution of non-piezoeletri and piezoeletri material in
the design domain, to ahieve ertain speied atuation movements. The
optimizationproblemisposedasthesimultaneoussearhforanoptimaltopology
of a exible struture as well as the optimal position of piezoeramis in the
design domain and optimal rotation angle of piezoerami material axes that
maximizeoutputdisplaementsoroutputforesataspeiedpointofthedomain
and diretion. When the distribution of a non-piezoeletri ondutor material
and a piezoerami material is onsidered in the design domain, the eletrode
positions are not known apriori. To irumvent this problem, an eletrield
is applied as eletrial exitation. Finally, the onept of funtionally graded
materials (FGM) is applied to PMAs design. FGMs are speial materials that
formulationisextendedtodesignbimorphtypeFGMatuators. Foralldeveloped
formulations,a multi-objetivefuntionis dened that ontrols the stiness and
exibility, minimizingthe oupling movement of eah atuated movement. The
presentexamplesarelimitedtotwo-dimensionalmodelsbeausemostpartofthe
appliations forsuh miro-toolsare planardevies.
Keywords: Nano-positioners. Miro-eletro-mehanial systems (MEMS).
Funtionally graded material (FGM). Piezoeletri atuators. Topology
Lista de Figuras
Lista de Tabelas
Lista de Abreviaturas
Lista de Símbolos
1 Introdução 1
1.1 Métodode OtimizaçãoTopológia(MOT) ApliadoaoProjetode
Atuadores Piezelétrios . . . 4
1.2 Materiais om Gradação Funional (MGF) Apliado a Atuadores Piezelétrios . . . 6
1.3 Objetivo . . . 8
1.4 ContribuiçõesCientías . . . 9
1.5 Organizaçãoda Tese . . . 11
2 Método de Otimização Topológia 12 2.1 Introdução à OtimizaçãoTopológia . . . 14
2.2 Histório . . . 15
2.3 Coneitos doMétodo de Otimização Topológia(MOT) . . . 18
2.4 Modelo de material . . . 19
2.4.1 Modelo de MaterialBaseado noMétodode Homogeneização 20 2.4.2 Métodode Densidade. . . 21
2.5 Considerações sobre oMétodo de Otimização Topológia . . . 23
3.1 Denição do ProblemaContínuo da Otimização Topológia (OT)
para oProjeto dos Multi-Atuadores Piezelétrios (MAP)s . . . 30
3.1.1 FormulaçãoContínuadoProblemapara Atender àFunção Eletro-meânia . . . 30
3.1.2 FormulaçãoContínuadoProblemapara Atender àFunção Estrutural . . . 33
3.1.3 Formulação Contínua do Problema para Minimizar os MovimentosAoplados . . . 34
3.1.4 Função Multi-Objetivo naForma Contínua . . . 35
3.1.5 Análise de Sensibilidade naForma Contínua . . . 36
3.2 FormulaçãoDisreta para o Projeto dos MAPs . . . 38
3.2.1 Modelo de Material . . . 38
3.2.2 FormulaçãoDisreta do Problemade OT . . . 39
3.2.3 Análise de Sensibilidade doProblema Disretode OT . . . 40
3.2.4 ImplementaçãoNumériadoMOTApliadoaoProjetodos MAPs . . . 43
3.3 Resultados Numérios . . . 43
3.3.1 NanoposiionadoresPiezelétrios
XY
. . . 453.3.2 Miro-GarraPiezelétria . . . 51
3.3.3 Nanoposiionadores Piezelétrios om
4
Movimentos de Atuação . . . 563.4 Resultados Experimentais . . . 60
3.4.1 Protótipos dos Nanoposiionadores Piezelétrios
XY
:1
o
onjuntode protótipos . . . 613.4.2 Protótipos dos Nanoposiionadores Piezelétrios
XY
:2
o
onjuntode protótipos . . . 664 Projeto dos Atuadores om a Loalização Ótima do Material
4.2 FormulaçãoDisreta para o Projeto dos LOMPs . . . 78
4.2.1 Mudança daPosição dos Eletrodos . . . 78
4.2.2 Modelo de material . . . 80
4.2.3 FormulaçãoDisreta do Problemade OT . . . 82
4.2.4 Análise de Sensibilidade daOT . . . 83
4.2.5 Implementação Numéria da OT apliada ao projeto dos LOMPs . . . 85
4.3 Resultados numérios para os Loalização Ótima do Material Piezelétrio (LOMP)s . . . 86
4.3.1 Projeto om
θ
nulo . . . 87Sem aMinimizaçãodo MovimentoAoplado . . . 88
Com aMinimizaçãodo MovimentoAoplado . . . 90
4.3.2 Projeto om
θ
Otimizávele IgualPara Todos os Elementos 91 Sem aMinimizaçãodo MovimentoAoplado . . . 91Com aMinimizaçãodo MovimentoAoplado . . . 92
4.3.3 Projeto Com
θ
OtimizávelPara CadaElementoFinito . . 93Sem aMinimizaçãodo MovimentoAoplado . . . 94
Com aMinimizaçãodo MovimentoAoplado . . . 96
4.3.4 Conlusão e Observações . . . 96
5 Projeto dos MAPs MGFs 100 5.1 FormulaçãoContínuadoProblemadeOT ApliadoaoProjetodos MAPs UtilizandoPiezoerâmias MGFs . . . 101
5.1.1 Modelo de Material . . . 102
5.1.2 Denição daFormulação Contínuado Problemade OT . . 103
5.2 FormulaçãoDisretadoProblemadeOTparaoProjetodosMAPs MGFs . . . 105
5.2.3 Análise de Sensibilidade daOT . . . 108
5.2.4 Função de ProjeçãoApliada aos MAPs MGFs . . . 110
5.2.5 Implementação Numériados MAPs MGFs. . . 112
5.3 Resultados Numérios . . . 113
5.3.1 AtuadorPiezelétrio om Um Movimentode Atuação . . . 113
MaterialPiezelétrio não-MGF ouHomogêneo . . . 114
MaterialPiezelétrio MGF om
ρ
3
Não-Otimizável. . . 116MaterialPiezelétrio MGF om
ρ
3
Otimizável . . . 120Conlusõese Observações . . . 129
Piezoerâmias MGFsCom Materiais Tipo1 eTipo 2 . . . 130
5.3.2 Nanoposiionadores
XY
MGFs . . . 131MaterialPiezelétrio MGF om
ρ
3
e
Otimizável . . . 1335.3.3 Miro-Garraom Piezoerâmias MGF . . . 136
6 Projeto dos Bilaminares MGFs 142 6.1 Formulação Contínua do Problema de OT para o Projeto dos BilaminaresMGFs . . . 143
6.2 Formulação Disreta do Problema de OT para o Projeto dos BilaminaresMGFs . . . 144
6.2.1 Função de ProjeçãoApliada aos BilaminaresMGFs . . . 146
6.2.2 Implementação Numériados BilaminaresMGFs . . . 146
6.3 Resultados Numérios . . . 147
6.3.1 Resultados Obtidos Considerando
w
= 0
,
2
. . . 149MGF Simétrioom
Θ
1
= 50%
. . . 150MGF Não-Simétrio om
Θ
1
= 50%
. . . 152MGF Simétrioom
Θ
1
= 100%
. . . 152MGF Simétrio . . . 159
MGF Não-Simétrio . . . 159
Conlusõese Observações . . . 161
6.3.3 Resultados Obtidos Considerando
w
= 1
,
0
. . . 163Conlusõese Observações . . . 166
7 Conlusões 167 7.1 TrabalhosFuturos. . . 169
Referênias 171 Apêndie A -- Piezeletriidade 185 A.1 Equações ConstitutivasPiezelétrias . . . 186
A.2 Matrizes PiezelétriasDenidas Para o MEF 2D . . . 190
A.2.1 Estado Plano de Tensões Meânias (EPTM) . . . 190
A.2.2 Estado Plano de DeformaçõesMeânias (EPDM) . . . 192
A.2.3 Rotaçãodas PropriedadesPiezelétrias . . . 192
A.3 PrinípioVariaionalPiezelétrio . . . 194
A.4 Propriedades dos MateriaisUtilizados . . . 196
Apêndie B -- Método de Elementos Finitos (MEF) piezelétrio 197 B.1 FormulaçãoMatriial doElemento . . . 198
B.2 Determinação Numériados DesloamentosNodais . . . 199
Apêndie C -- Formulação da Transdução Média 201 Apêndie D -- Implementação Numéria 204 D.1 ProgramaçãoLinear Seqüenial (PLS) . . . 205
Apêndie F -- Protótipos Fabriados dos MAPs Piezelétrios 211
Nanoposiionador Piezelétrio XYW05B001 . . . 211
Nanoposiionador Piezelétrio XYW07B01S . . . 213
Nanoposiionadores Piezelétrios XYW05B0P, XYW05B001P,
XYW07B0P e XYW07B01P . . . 215
1.1 Multi-atuadorespiezelétrios. . . 2
1.2 Exemplode atuadorespiezelétriosparaposiionamentoapliados namirosopia eletrnia. . . 3
1.3 Exemplo de miro-manipuladorespiezelétrios. . . 3
1.4 Representação esquemátia davariaçãoda miroestrutura emum materialgradado. . . 6
2.1 Exemplo de 3 ategorias de otimização estrutural: (a) e (b) otimização paramétria; () e (d) otimização de forma, e (e) e (f) otimização topológia. . . 13
2.2 Proedimento de projeto de multi-atuadores piezelétrios utilizandoaotimização topológia. . . 16
2.3 Domínioestendido xo
Ω
e odomínio desonheidoΩ
d
. . . 192.4 Miroestruturas para ométododa homogeneização. . . 21
2.5 Arranjode instabilidadede xadrez. . . 24
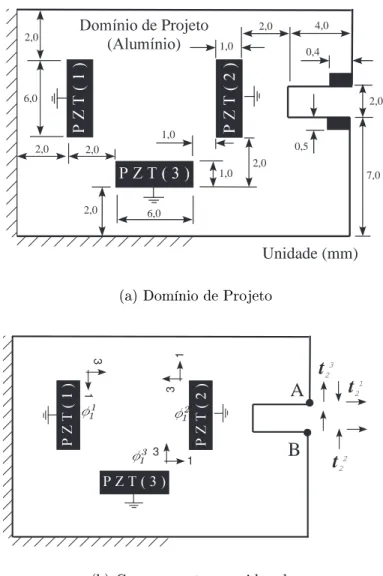
3.1 Coneito de multi-atuadorespiezelétrios.. . . 28
3.2 Estrutura aoplada atuada por piezoerâmias. Casos de arregamento para álulo da transdução média, exibilidade média (somente para piezoerâmia 1) e função restrição de aoplamento, respetivamente. . . 32
3.3 Fluxograma dométodoimplementado parao MAP. . . 44
3.4 Domínios de projeto para o nanoposiionador piezelétrio
XY
. . . 453.5 Topologias ótimas para o nanoposiionador piezelétrio
XY
(Θ
upp
= 25%
,α
1
=
α
2
= 0
,
5
eβ
1
=
β
2
= 0
,
0
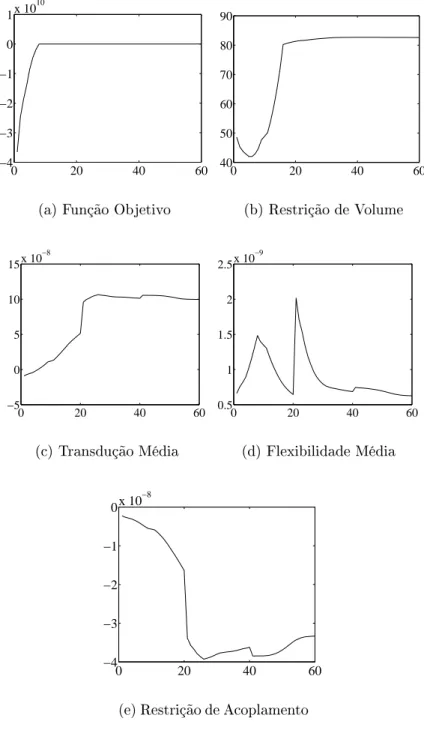
). . . 46das respetivas funções. . . 48
3.8 OtimizaçãoTopológia(
w
= 0
,
5
,α
1
=
α
2
= 0
,
5
,eβ
1
=
β
2
= 0
,
0
),desde que
Σ
ρ
I
0
≤
Θ
upp
. . . 49 3.9 Topologia ótima (α
1
=
α
2
= 0
,
5
). . . 493.10 Conguraçãodeformadadastopologiaspós-proessadasmostradas
naFigura 3.9. . . 50
3.11 Gráo de onvergênia da função restrição de aoplamento da
Figura 3.9(b). A absissa representa o número de iterações e a
ordenada ovalordafunção restrição de aoplamento. . . 50
3.12 Domínios de projeto para a miro-garrapiezelétria. . . 52
3.13 Resultados ótimos (
w
= 0
,
5
,α
1
=
α
2
=
α
3
= 1
/
3
, eβ
1
=
β
2
=
β
3
= 0
,
0
). . . 533.14 Deformada datopologia apresentada naFigura 3.13(a). . . 54
3.15 Resultados ótimos (
w
= 0
,
5
,α
1
=
α
2
=
α
3
= 1
/
3
, eβ
1
=
β
2
=
β
3
= 0
,
1
). . . 553.16 Deformada datopologia apresentada naFigura 3.15(a). . . 56
3.17 Domínios de projeto para o miro-meanismopiezelétrio. . . 57
3.18 Resultados ótimos (
w
= 0
,
5
,α
i
= 1
/
4
,eβ
i
= 0
,
0
),i
= 1
a4
. . . . 57 3.19 Deformada datopologia apresentada naFigura 3.18. . . 583.20 Resultados ótimos (
w
= 0
,
5
,α
i
= 1
/
4
,eβ
i
= 0
,
001
),i
= 1
a4
. . 58 3.21 Deformada datopologia apresentada naFigura 3.20. . . 593.22 Domínio iniial de projeto dos nanoposiionadores piezelétrios
XY
utilizando as mesmas espeiações para os movimentos deatuações daFigura3.4(b). . . 61
3.23 Nanoposiionador piezelétrio
XY
05
(w
= 0
,
5
,α
1
=
α
2
= 0
,
5
, eβ
1
=
β
2
= 0
,
0
). . . 633.24 Nanoposiionador piezelétrio
XY
05
b
(w
= 0
,
5
,α
1
=
α
2
= 0
,
5
, eβ
1
=
β
2
= 0
,
0
). . . 653.26 Nanoposiionador piezelétrio XYW05B0 (apresentado
iniialmente na Figura 3.5(b), para
Θ
upp
= 25%
,α
1
=
α
2
= 0
,
5
,β
1
=
β
2
= 0
,
0
ew
=0,5). . . 673.27 Nanoposiionador piezelétrio XYW08B0 (apresentado
iniialmente na Figura 3.5(), para
Θ
upp
= 25%
,α
1
=
α
2
= 0
,
5
,β
1
=
β
2
= 0
,
0
ew
=0,8). . . 683.28 Nanoposiionador piezelétrio XYW07B0S (
Θ
upp
= 25%
,α
1
=
α
2
= 0
,
5
,β
1
=
β
2
= 0
,
0
ew
=0,7).. . . 693.29 Nanoposiionador piezelétrio XYW08B01. Nesse projeto foram
utilizados os mesmos parâmetros de OT do nanoposiionador da
Figura3.9()onsiderando
Θ
upp
= 25%
,α
1
=
α
2
= 0
,
5
,β
1
=
β
2
=
0
,
1
ew
=0,8, porém utilizou-sep
= 3
enãop
= 4
. . . 704.1 a) Método onvenional de projeto de um piezoatuador usando a
OT; b)Métodoproposto de projetode um piezoatuadorusandoo
OT. . . 73
4.2 Condições de arregamento dos LOMPs para o álulo da: (a)
transdução média; (b) exibilidade média; e () função restrição
de aoplamento. . . 75
4.3 Conguração dos graus de liberdades meânios e elétrios para
ada elemento nito no aso dos LOMPs. Sendo,
u
i
ev
i
desloamentosmeânios do nói
, eφ
ij
dene o potenial elétrio apliadonaj
-thposição doi
-ésimo nó. . . 794.4 Estratégia adotadapara variara posição dos eletrodos. . . 80
4.5 Casosde arregamentopara oálulonumérioda(a)transdução
média;(b)exibilidademédia;e()funçãorestriçãodeaoplamento. 83
4.6 Fluxograma dométodoimplementado parao LOMP. . . 86
4.7 Domínio de projeto, e araterístias dos arregamentos e
0
,
0
; a)Topologia ótima parao materialpiezelétrio;b) Topologiaótima para o alumínio; ) Topologia nal pós-proessada (esuro
região piezelétria; lara alumínio);d) Deformada. . . 88
4.9 Gráos de onvergênia para o resultado da Figura 4.8(a) e
Figura 4.8(b). A absissa india a iteração e a oordenada os
valores das funções. . . 89
4.10 Resultado onsiderando
w
= 0
,
5
,θ
e
= 0
◦
(não otimizável), e
β
= 0
,
001
; a) Topologia ótima para o material piezelétrio; b)Topologia ótima para o alumínio; ) Topologia nal interpretada
(esuro região piezelétria;lara alumínio);d)Deformada. . . 90
4.11 Gráos de onvergênia para o resultado da Figura 4.10(a) e
Figura 4.10(b). A absissa india a iteração e a oordenada o
valores das funções. . . 91
4.12 Resultado onsiderando
w
= 0
,
5
apenas uma variávelθ
e
(para todos elementos), eβ
= 0
,
0
; a) Topologia ótima para o materialpiezelétrio;b)Topologiaótimaparaoalumínio;)Topologianal
pós-proessada (esuro região piezelétria; lara alumínio);d)
Deformada. . . 92
4.13 Gráosde onvergênia para o resultado da 4.12(a)e 4.12(b). A
absissaindia a iteraçãoe aoordenadaos valores das funções. . 92
4.14 Resultado onsiderando
w
= 0
,
5
apenas uma variávelθ
e
(para todoselementos),eβ
= 0
,
0001
;a)Topologiaótimaparaomaterialpiezelétrio;b)Topologiaótimaparaoalumínio;)Topologianal
pós-proessada (esuro região piezelétria; lara alumínio);d)
Deformada. . . 93
4.15 Gráosde onvergênia para o resultado da 4.14(a)e 4.14(b). A
absissaindia a iteraçãoe aoordenada os valores das funções. . 94
4.16 Resultadoonsiderando
w
= 0
,
5
,avariávelθ
e
otimizávelparaada elemento nito, eβ
= 0
,
0
; a) Topologia ótima para o materialpiezelétrio; b) Topologia ótima para o alumínio; ) Distribuição
de
θ
e
no domínio piezelétrio pós-proessado; d) Topologia nal pós-proessada (esuro região piezelétria; lara alumínio); e)4.18 Resultado onsiderando
w
= 0
,
5
, a variávelθ
e
é otimizável para ada elemento nito, eβ
= 0
,
0001
; a) Topologia ótima parao material piezelétrio; b) Topologia ótima para o alumínio; )
Distribuição de
θ
e
no domínio piezelétrio pós-proessado; d) Topologia nal pós-proessada (esuro região piezelétria; laraalumínio);e) Deformada. . . 97
4.19 Gráos de onvergênia para o resultado da Figura 4.18(a) e
Figura 4.18(b). A absissa india a iteração e a oordenada os
valores das funções. . . 98
4.20 Proposta de fabriação3D para osLOMPs. . . 99
5.1 Coneito de dispositivos piezelétriosMGF. . . 101
5.2 Casosde arregamentoparaoálulodatransduçãomédia,função
restrição de aoplamento, e exibilidade média, respetivamente.
Sendo,
E
j
i
=
−∇
φ
i
é o ampo elétrio relaionado om o aso de arregamentoi
apliado apiezoerâmiaj
. . . 1045.3 Denição das variáveis de projeto
ρ
2
J
eρ
3
e
no MEF MGF, onsiderandoa polarizaçãonadireção 3. . . 1065.4 Domíniode abrangênia dafunção de projeção. . . 110
5.5 Fluxograma do método implementado para o projeto de MAPs
MGFs. . . 112
5.6 Domíniode Projetodo Atuador Piezelétrio MGF. . . 114
5.7 Topologia ótima obtida para o atuador homogêneo (vermelho
região piezelétria;azul alumínio).. . . 115
5.8 Deformadasdastopologiaspós-proessadas paraosatuadores om
piezoerâmias homogêneas. . . 115
5.9 Topologia ótima obtida para o atuador om piezoerâmia MGF,
onsiderando
Θ
2
S
= 50%
(vermelho região piezelétria; azul alumínio). . . 1185.10 Perl da gradação naregião MGF, onsiderando
Θ
2
S
= 50%
. . . . 118 5.11 Deformadas das topologias pós-proessadas dos atuadores omΘ
2
S
= 50%
alumínio). . . 122
5.13 Deformadas das topologiaspós-proessadas daFigura5.12. . . 123
5.14 TensõesMeânias de vonMises. . . 124
5.15 Perl da gradação daFigura 5.12. . . 125
5.16 Topologia ótima obtida para o atuador om piezoerâmia MGF, onsiderando
Θ
2
S
= 100%
(vermelho região piezelétria; azul alumínio). . . 1265.17 Deformadas das topologiaspós-proessadas daFigura5.16. . . 127
5.18 Perl da gradação daFigura 5.16. . . 128
5.19 Resultado obtido onsiderando piezoerâmia MGF,
Θ
2
S
= 50%
,ρ
3
e
0
= 0
,
1
,β
1
= 10
−
5
er
min
= 0
,
1
mm(vermelho tipo 1; verde tipo 2; azul alumínio). . . 1315.20 Perl da gradação daFigura 5.16. . . 131
5.21 Domíniode Projetodo Nanoposiionador
XY
MGF. . . 1325.22 Resultado obtido onsiderando piezoerâmia MGF,
Θ
2
S
= 50%
,ρ
3
e
= 1
,
0
eβ
1
= 0
,
0
. . . 1345.23 Perl da gradação das pseudo densidades
ρ
2
J
e da variável de projetoρ
3
e
. . . 1355.24 Domíniode projeto da miro-garraMGF.. . . 136
5.25 Resultados damiro-garras MGFs onsiderando
β
= 0
,
0
. . . 1385.26 Pers de gradação domaterial MGF daFigura5.25(a). . . 139
5.27 Resultados damiro-garras MGFs onsiderando
β
= 10
−
5
. . . 1405.28 Pers de gradação domaterial MGF daFigura5.27(a). . . 141
6.1 Gradação ótima napiezoerâmiaMGF. . . 143
6.2 Casos de arregamentos para o álulo da função multi-objetivo apliadaaos bilaminares MGFs. . . 145
6.5 Arranjoda gradação das pseudo-densidades. . . 149
6.6 Gradaçãoótimasimétriaobtidaonsiderando
w
= 0
,
2
eΘ
1
= 50%
.1506.7 Gráosde onvergênia daFigura6.6. . . 151
6.8 Gradaçãoótimanão-simétriaobtidaonsiderando
w
= 0
,
2
eΘ
1
=
50%
. . . 1536.9 Gráosde onvergênia daFigura6.8. . . 154
6.10 Gradaçãoótimasimétriaobtidaonsiderando
w
= 0
,
2
eΘ
1
= 100%
.1546.11 Gráosde onvergênia daFigura6.10. . . 155
6.12 Gradaçãoótimanão-simétriaobtidaonsiderando
w
= 0
,
2
eΘ
1
=
100%
. . . 1566.13 Gráosde onvergênia daFigura6.12. . . 157
6.14 Gradaçãoótimasimétriaobtidaonsiderando
w
= 0
,
5
eΘ
1
= 50%
.1596.15 Gráosde onvergênia daFigura6.14. . . 160
6.16 Gradaçãoótimanão-simétriaobtidaonsiderando
w
= 0
,
5
eΘ
1
=
50%
. . . 1616.17 Gráosde onvergênia daFigura6.16. . . 162
6.18 Gradaçãoótimasimétriaobtidaonsiderando
w
= 1
,
0
eΘ
1
= 50%
.1636.19 Gradaçãoótimanão-simétriaobtidaonsiderando
w
= 1
,
0
eΘ
1
=
50%
. . . 1646.20 Gradaçãoótimasimétriaobtidaonsiderando
w
= 1
,
0
eΘ
1
= 100%
.1646.21 Gráosde onvergênia daFigura6.20. . . 165
7.1 Propostade projetopara eliminaronentração de tensõesentre a
interfaeregiãoMGFestruturaexível: (a)ProjetodosLOMPs;
(b) Projeto dos LOMPs MGFs. . . 169
A.1 Diagrama entre asinteraçõesmeânias e elétrias. . . 185
A.2 Estado plano de tensões e deformações meânias. A polarização
éonsiderada nadireção 3. . . 191
de feixes polarizador; R - espelho de referênia; S - piezoatuador;
λ/
2
- plaa de meio omprimento de onda;λ/
4
- plaa de umquarto de omprimento de onda a
45
o
; A1, A2 - polarizadores a
45
o
; PDA1, PDA2 - foto-diodos ampliadores, GPIB - protoolo
de omuniação. . . 210
F.1 Nanoposiionador piezelétrio XYW05B001 (onsiderado
iniialmente na Figura 3.9(b), para
Θ
upp
= 25%
,α
1
=
α
2
= 0
,
5
,β
1
=
β
2
= 0
,
01
ew
=0,5).. . . 212F.2 NanoposiionadorpiezelétrioXYW07B001S (
w
= 0
,
7
,α
1
=
α
2
=
0
,
5
, eβ
1
=
β
2
= 0
,
01
). . . 214F.3 Nanoposiionador piezelétrio XYW05B0P (
w
= 0
,
5
,α
1
=
α
2
=
0
,
5
, eβ
1
=
β
2
= 0
,
0
).. . . 216F.4 Nanoposiionador piezelétrio XYW05B001P (
w
= 0
,
5
,α
1
=
α
2
= 0
,
5
, eβ
1
=
β
2
= 0
,
01
). . . 216F.5 Nanoposiionador piezelétrio XYW07B0P (
w
= 0
,
7
,α
1
=
α
2
=
0
,
5
, eβ
1
=
β
2
= 0
,
0
).. . . 217F.6 Nanoposiionador piezelétrio XYW07B01P (
w
= 0
,
7
,α
1
=
α
2
=
0
,
5
, eβ
1
=
β
2
= 0
,
1
).. . . 217F.7 Mirogarra piezelétrio MGW05B0 (
w
= 0
,
5
,α
1
=
α
2
=
α
3
=
1
/
3
, eβ
1
=
β
2
=
β
3
= 0
,
0
).. . . 219F.8 Mirogarra piezelétrio MGW05B01 (
w
= 0
,
5
,α
1
=
α
2
=
α
3
=
3.1 Desloamentos
X
eY
no ponto A (100
V
apliado) e fator deaoplamento (
R
xy
). . . 51 3.2 Valores dos desloamentos nas direçõesX
eY
para os pontosA
eB
(veja Figura3.12(b))(100
V
apliados) efatores de aoplamento(
R
1
) e(R
2
),respetivamente. . . 553.3 Valores dos desloamentos para os pontos
A
,B
,C
eD
(100
V
apliado)e fatorde aoplamento(
R
). . . 603.4 Resultados numérios e experimentais dos nanoposiionadores
piezelétrios
XY
(desloamentosX
eY
no ponto A para100
V
apliado). . . 62
3.5 Resultados numérios e experimentais dos nanoposiionadores
piezelétrios XY (desloamentos
X
eY
no ponto A para100
V
apliado). . . 71
4.1 Valor do desloamentovertial no ponto
A
(500V /mm
apliado)efator de aoplamento(
R
yx
). . . 98 5.1 DesloamentonopontoA
daFigura5.6onsiderandoE=400V/mm.1165.2 Desloamentonoponto
A
daFigura5.6onsiderandoE=400V/mm.1175.3 Desloamentosnasdireções
X
eY
dopontoAdaFigura5.6,sendoE=400V/mm eo fatorde aoplamento dado por
R
yx
=
u
x
/u
y
.. . 129 5.4 Desloamentos nas direçõesX
eY
do ponto A da Figura 5.6,onsiderandoE=400 V/mm. . . 132
5.5 Valoresdosdesloamentonoponto
A
daFigura5.21,onsiderandoE
= 400
V/mm,ρ
3
e
= 0
,
1
,β
= 0
,
0
er
min
= 0
,
1
mm. . . 1335.6 Valores dos desloamentos nas direções
X
eY
noA
(u
1
eu
2
representamosvaloresdosdesloamentodomovimentodeatuação
e o aoplado, respetivamente) da Figura 5.24 para um ampo
6.2 Valores dos desloamentos geradospara
w
= 0
,
5
. . . 1626.3 Valores dos desloamentos geradospara
w
= 1
,
0
. . . 166A.1 Propriedade domaterialPZT5A. . . 196
F.1 Resultados numérios do nanoposiionador piezelétrio
XYW05B001 (desloamentos
X
eY
no ponto A para100
V
apliado). . . 212
F.2 Resultados numérios do nanoposiionador piezelétrio
XYW07B001S (desloamentos
X
eY
no ponto A para100
V
apliado). . . 213
F.3 Resultados numérios do nanoposiionador piezelétrio XY
(desloamentos
X
eY
no ponto Apara100
V
apliado). . . 215F.4 Valores dos desloamentos nas direções
X
eY
para os pontosA
eB
da Figura 3.12(b) onsiderando um potenial elétrio de100
V
CAD Computer-AidedDesign
CAMD Continuous Approximation of Material Distribution
LNLS LaboratórioNaional de Luz Sínrotron
LSI Laboratóriode Sistemas Integráveis
MDF Método de Diferenças Finitas
MEF Métodode ElementosFinitos
MEMS Miro-Eletro-Mehanial Systems
MOT Método de Otimização Topológia
OT Otimização Topológia
PL ProgramaçãoLinear
PLS Programação LinearSeqüenial
CO Critériode Optimalidade
PQS Programação QuadrátiaSequenial
SIMP Simple Isotropi Material with Penalization
MAP Multi-Atuadores Piezelétrios
LOMP LoalizaçãoÓtima doMaterial Piezelétrio
PZT5A Titanato Ziranatode Chumbo
PZT TitanatoZiranato de Chumbo
2D Duas Dimensões
EPDM Estado Plano de DeformaçõesMeânias
AFM Atomi Fore Mirosopy
EEF Eletro-Erosão aFio
MMA Método de movimentoassintótio
PQS Métodode programaçãoquadrátiaseqüenial
GMMA MMA Generalizado
GBMMA GradientBased MMA
GCMMA GloballyConvergent version of the MMA
SPM Sanning Probe Mirosopes
Os seguintes símbolosserão utilizados:
símbolo desrição
(
x, z
)
sistemasde oordenadasA
I
variável de projetoB
u
,
B
φ
funções daderivada das funções de formac
E
tensorelástio à ampo elétrioonstante
C
H
tensorelástio efetivo
C
0
tensorelástio domaterial based
argaselétrias distribuídasD
vetor desloamento elétrioe
tensorpiezelétrioǫ
tensordielétrioe
0
tensorpiezelétrio domaterial basee
i
vetor unitárioE
ampo elétrioF
forças meânias nodaisF
função multi-objetivon
vetor normalQ
argaselétrias nodais{Q}
vetor de arregamento meânio eelétrio presritosK
uu
matrizde rigidezK
uφ
matrizpiezelétriaK
φφ
matrizdielétria[
K
]
matrizesL
2
(
u
1
, φ
1
)
transduçãomédiaL
3
(
u
3
, φ
3
)
exibilidademédiaL
4
(
u
1
, φ
1
)
função restriçãode aoplamentoN
I
(
x
)
funções de formadoelemento nitoN
des
número de nós no domíniode projetonf
número de nos onetado ao elementoI
S
eΩ
domíniode projetot
arregamentomeâniou
desloamento meâniou
i
ev
i
desloamentos horizontais e vertiais do nói
,respetivamente
U
desloamento meânios nodais{U}
desloamentos elétriose meânios livresv
desloamento virtualV
espaçoV
a
espaçodo aso 1V
b
espaçodo aso 2V
c
espaçodo aso 3V
I
volume do elementonitox
vetor de oordenadasw
oeientede peso da função multi-objetivoβ
oeientede peso da função restriçãode aoplamentoǫ
S
tensordielétrioà deformação onstanteε
(
u
)
deformçãoφ
potenialelétrioφ
ij
j
-ésimos poteniaisnosi
-ésimo nósφ
a
,
b
,
c
,
d
graus de liberdadeelétrios doelemento nitoφ
0
voltagem elétriaapliadaΦ
vetor potenialelétrio nodalΓ
u
superfíie dos desloamentosmeânios presritosΓ
φ
superfíie dos poteniais elétriospresritosΓ
t
i
superfíie de apliação do arregamento meânio doaso
i
Γ
d
i
superfíie de apliaçãodo potenialelétrio doasoi
ϕ
potenialelétrio virtual{
Λ
}
vetor auxiliarno álulodo MEFΘ
volume do domíniode projetoΘ
pzt
restriçãode volume máximo para oPZTρ
I
variávelde projetonodalrelaionadaomadistribuiçãode material
ρ
1
e
variável de projeto relaionada om a direção depolarização
ρ
pseudo-densidadeσ
tensordas tensõesΩ
e
domíniodoelemento∇
φ
gradientedo potenialelétrio1 Introdução
Atenologiadenano-posiionamentoemiromanipulaçãoenvolveautilização
de dispositivos que gerem desloamentos da ordem de nanmetros até
mirmetros. Esses dispositivos podem ser hamados de nanoposiionadores ou
miromanipuladores, e são empregados na área de nano ou miro tenologia
dependendo da apliação (Chu & Fan 2006). Ambos apresentam o mesmo
prinípio de funionamento, diferindo na sua apliação. Um nanoposiionador
é essenialmente um atuador destinado à tarefa de nanoposiionamento (Smith
& Chetwynd 1992, Chang etal. 1999a, Chang etal. 1999b, Ku et al. 2000, Gao
et al. 2000, Zhang et al. 2003, Carbonari, Silva & Nishiwaki 2005, Chu &
Fan2006), omomostrado naFigura1.1(a). Jáo miroatuadoréessenialmente
um atuador de dimensões milimétrias ou até mirométrias que exeuta uma
tarefa espeía, omo atuar omo garra, pinça, grampo, et (Ishihara et al.
1996, Kim et al. 2004, Pérez et al. 2005, Pérez et al. 2006). Eventualmente
podem-se ombinar ambos oneitos num únio dispositivo, por exemplo, além
de realizar o posiionamento preiso também atua omo uma garra (Carbonari,
Silva & Nishiwaki 2005), omo mostrado na Figura 1.1(b). Em geral esses
dispositivos possuem atuação piezelétria, uma vez que erâmias piezelétrias
ao serem exitadas geram desloamentos da ordem de nanmetros, que podem
ser ampliados até mirometros, através da estrutura exível. Materiais
piezelétrios são materiais que geram desloamentos ao serem exitados om
potenial elétrio, bem omo, geram potenial elétrio ao serem submetidos a
uma força.
Osdispositivospiezelétrios, omo, mirogarrastêm sido desenvolvidos para
manipulação de élulas e ferramentas para miroirurgias(Eisinberg etal. 2001,
Meniassi et al. 2003, Volka et al. 2003), miromanipulação (Ferreira et al.
2004, Kim et al. 2004, Pérez et al. 2005, Pérez et al. 2006), nanoposiionadores
piezelétrios (Chang et al. 1999a, Chang et al. 1999b, Elmustafa & Lagally
2001, Salapaka et al. 2002b, Zhang et al. 2003), ou no posiionamento de
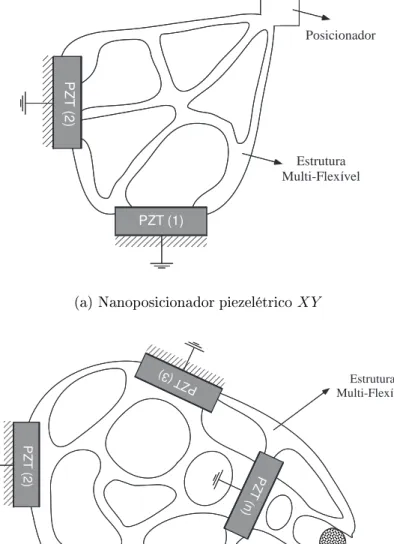
(a) Nanoposiionador
piezelétrio
XY
(b) Mirogarra piezelétria, om
movimentos
XY
eabrir /fehar da garraFigura 1.1: Multi-atuadorespiezelétrios.
miromotores piezelétrios(Tenzer & Ben Mrad 2004, Kwon etal. 2004). Outro
ampodeapliaçãosãoosMiro-Eletro-MehanialSystems(MEMS)(Ishihara
et al. 1996, Reynaerts et al. 1998, Rai-Choudhury 2000). Espeiamente, em
mirosopia eletrnia destaam-seas apliaçõesem mirossondaseletrnias de
varredura (Sanning Probe Mirosopes (SPM)) (Shim & Gweon 2001), omo
o mirosópio de força atmia (Atomi Fore Mirosopy (AFM)) (Shibata
et al. 2004) e mirosópio eletrnio de tunelamento (Sanning Tunneling
Mirosopy (STM)) (Bonnail et al. 2004), que permitem além da visualização
nanométria de uma superfíie (ver o exemplo ilustrativo da Figura 1.2),
a manipulação de átomos e moléulas, que podem ser arrastados de um
ponto e depositados em outro ponto previamente seleionado, onstituindo
numa das mais poderosas ferramentas para o estudo e desenvolvimento de
Nanotenologia. Desta forma, os mirosópios STM e AFM inorporam
dispositivos de nanoposiionamento e miromanipulação, ou seja, os mesmos
dispositivos desritos aima. Portanto, os mirodispositivos piezelétrios são
ferramentas empregadas em Nanotenologia, em mirosópios de varredura por
pontadeprovaedispositivosdenanoposiionamentoemiromanipulação,ambos
ujo desenvolvimento é uma das prinipais áreas de pesquisa na Meatrnia
(Salapakaetal.2002a,Rifai&Toumi2004,Chu&Fan2006). Conseqüentemente,
a apliação da tenologia de mirodispositivos piezelétrios está em resente
desenvolvimento.
A tenologia de nanoposiionamento também é have nos ampos da
nano-impressão, mirolitograa e alinhamento automátio (Smith & Chetwynd
(a)Nanoposiionadordepontasde prova
demirosópiosSTMeAFM
(b)Posiionadordelentes
Figura 1.2: Exemplo de atuadores piezelétriospara posiionamentoapliados
namirosopia eletrnia.
(a) Miro-manipulador
piezelétrio atuado por pilhas
piezoerâmias
(b) Miro-manipulador e mirogarra
piezelétria
Figura 1.3: Exemplo de miro-manipuladorespiezelétrios.
e miromanipulação são: meanismo de leitura de sistema óptios em CDs,
DVDs; sistemasóptiosde auto-foo;máquinasom CNC(Woronkoetal.2003);
disos rígido de omputador; meanismos de aionamento de miropistões em
impressoras desk jet; meanismo de leitura de diso rígido de omputadores
(Kurihara et al. 2004); meanismos internos em máquinas fotográas;
instrumentos de mirosopia eletrnia; posiionadores de másaras e wafers
em Miroeletrnia; posiionadores de lentes em sistemasóptios; equipamentos
para manipulação de élulas; nanorobótia (Cavalanti & Freitas Jr. 2005);
nanometrologia; equipamentos destinados à manipulação em Nanotenologia
(manipulação de nanotubos, por exemplo, omo os ilustrados na Figura 1.3);
entre outras. Portanto, onsiste numa tenologia uja apliação vem resendo
nano
amicro
, esses dispositivos são essenialmente onstituídos de meanismosexíveis atuados por piezoerâmias (Claeyssen et al. 2001). Num meanismo
exível o movimento é dado pela exibilidade estrutural, ao invés da presença
de juntas e pinos (Howell 2001) (ver Figura 1.1). Além disso, tem a vantagem
de onsistir numa únia peça, failitando a sua fabriação. A utilização de
meanismos tradiionais om juntas epinos apresenta o problema de folgas, que
inviabiliza a transmissão de desloamentos da ordem de grandeza exigida em
nanoposiionamento e miromanipulação. Meanismos exíveis possuem várias
apliações, mas ertamente uma área em que a sua utilização tem ontribuído
bastante é na área de nanoposiionadores e miroatuadores, prinipalmente
em MEMS (Rai-Choudhury 2000), onde a dimensão mirosópia inviabiliza
a fabriação e montagem de juntas e pinos (Kota et al. 2000, Kota et al.
2001). Uma disussão ampla sobre meanismos exíveis é apresentada por
Howell (2001). Nanoposiionadores e miromanipuladores piezelétrios são
essenialmente atuadores piezelétrios extensionais, ou seja, onsistem em
meanismos exíveis atuados por piezoerâmias. A estrutura exível aoplada
às piezoerâmias (omo mostrado na Figura 1.1) é um meanismo exível
ou multi-exível que atua omo um transformador meânio, ampliando e
direionando os desloamentos gerados pelas piezoerâmias. O dispositivo que
onsiste num meanismo exível atuado porpiezoerâmias é denominadonessa
tese de MAPs. Osdesloamentosgerados poresses dispositivossão da ordemde
dezenas de nanmetros até mirmetros, dependendo da intensidade do ampo
elétrio apliado (Caneld & Freker 2000) e do tipo de material piezelétrio
utilizado(PZN, PZT ePMN) (Woody & Smith2004).
Um histório dos primeiros projetos de nanoposiionadores e
miromanipuladores piezelétrios é apresentado no trabalho de mestrado
entitulado de Projeto de Atuadores Piezelétrios Flextensionais Usando o
Métodode OtimizaçãoTopológia (Carbonari 2003).
1.1 Método de Otimização Topológia (MOT)
Apliado ao Projeto de Atuadores
Piezelétrios
O MOT desenvolvido iniialmente para apliações em projetos de
maximização da rigidez estrutural (Bendsøe & Kikuhi 1988, Bendsøe 1989,
(1997) e Nishiwaki et al. (1998) apresentaram uma formulação multi-objetivo
apliada a meanismos exíveis para maximizar a razão entre a energia mútua
e a energia de deformação (exibilidade média). Essenialmente, o projeto de
um meanismo exível pode ser entendido omo a distribuição de exibilidade
e rigidez no interior de um domínio xo para atender às espeiações de
projeto do meanismo. Assim, foi desenvolvida uma formulação que atende às
exigênias de estabilidade estrutural no projeto de meanismos exíveis. Silva
& Kikuhi (1999b), Silva & Kikuhi (1999a), Silva, Nishiwaki & Kikuhi (1999)
e Silva et al. (2000) expandiram os oneitos de energia mútua e exibilidade
média apliada a meanismos exíveis para o projeto atuadores piezelétrios
extensionais, desenvolvendo um método que permite projetar diferentes tipos
de atuadores piezelétrios extensionais não-onvenionais, omo, por exemplo,
garras, grampos, pinças, et... A partir destes trabalhos, seguem-se vários
trabalhosqueutilizamoMOTnoprojetodeatuadorespiezelétriosextensionais,
inluindoaaraterização de protótipos,omo, porexemplo, Caneld &Freker
(2000) que estudaram a formulação do problema de OT e seu método de
solução utilizando o ritério da optimalidade (OC), num domínio disretizado
om elementos de treliça. Na seqüênia, Freker & Caneld (2000) projetaram
atuadores piezelétrios utilizando a OT om elementos de treliça e sólidos,
veriando o desempenho destes atuadores piezelétrios através do MEF e
experimentalmente. Lauetal.(2000)estudouoprojetodeatuadorespiezelétrios
extensionais atravésda OT prourando obter a estrutura exível que forneça a
máxima ampliaçãodos desloamentos geradospelapiezoerâmiaoupilhasde
piezoerâmias.
A utilização do MOT tornou eaz, genéria e sistemátia o projeto de
meanismosexíveis(Sigmund1997,Nishiwakietal.1998,Nishiwakietal.2001)
eatuadores piezelétriosextensionais(Silvaetal.2000)possibilitandoexpandir
as áreas de apliação da tenologia de atuadores piezelétrios extensionais, o
que permitiuprojetardiferentes tipos desses dispositivospara realizardiferentes
tarefas. Nessesentido,Duetal.(2000)utilizouaOTnoprojetodeampliadores
meânios (estrutura exível) para atuadores piezelétrios, sob arregamento
dinâmio, ou seja, para arregamentos om exitação harmnia sem inluir o
efeitodo amorteimento. Bharti &Freker (2004) projetaram utilizandoa OT e
araterizaramexperimentalmenteum atuadorpiezelétrioextensionalapliado
no ontrole da estabilidade inerial de um rie. A OT é apliada no projeto
dinâmio de meanismos exíveis e atuadores piezelétrios por Maddisetty &
restrição a apaitânia do atuadorpiezoerâmio. A OT também é empregada
para projetar sensores que tenham a máxima eiênia da transformação da
energiameânia emelétria(voltagem)napiezoerâmiapelaestrutura exível
(Abdalla et al. 2005). Outras metodologias e apliações do MOT no projeto de
atuadores piezelétrios extensionais é apresentada na revisão feita por Freker
(2003). Em 2005 foi desenvolvido uma formulação para projetar atuadores
piezelétrios extensionais onsiderando não-linearidade geométria através do
MOT (Cardoso & Fonsea 2004, Cardoso 2005). Gibert & Austin (2007)
utilizaramaOTparaobteradireçãoótimadapolarizaçãodomaterialpiezelétrio
eatopologiadaestruturaexível,alémde analisaroomportamentodomaterial
piezelétrio eda estrutura exível.
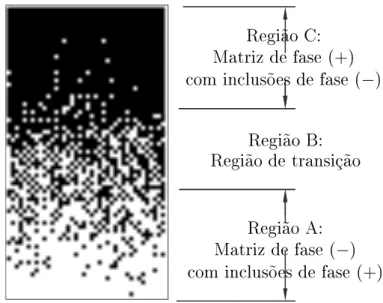
1.2 Materiais om Gradação Funional (MGF)
Apliado a Atuadores Piezelétrios
PSfrag replaements
Região A:
Matriz de fase (
−
) om inlusõesde fase (+
)Região B:
Região de transição Região C:
Matriz de fase(
+
)om inlusõesde fase(
−
)Figura 1.4: Representação esquemátia da variaçãoda miroestrutura em um
materialgradado.
MGF são materiais avançados, ujas propriedades variam de forma gradual
ao longo do material. Esta lasse de materiais é araterizada pela variação
espaial da miroestruturas, desta forma é possível onstruir omponentes uja
miroestrutura varie de forma gradual, de tal modo que, por exemplo, em
uma região há um material metálio (Região A da Figura 1.4) e em outra
região há um material erâmio (Região C da Figura 1.4), sendo que não
existe uma interfae denida entre as duas regiões (Região B da Figura 1.4),
a matriz da miroestrutura será omposta por metal om inlusão de material
erâmio (omo observado na Figura 1.4), e assim, a porentagem do material
denido na inlusão da miroestrutura aumenta gradualmente até a região
denida de interfae ou de transição (Suresh & Mortensen 1988). Portanto,
estes materiaisombinamavantagem de araterístiasdesejáveis das suas fases
onstitutivas, além da variação suave das propriedades, que fornee vantagens
omo a redução da onentração de tensão (Kim & Paulino 2002). Avanços
reentes no proessamento de materiais têm permitido fabriar uma ampla
variedade de MGFs (Kiebak et al. 2003). O oneito de MGF pode ser
estendido para materiaisbifásios (ou multifásios)que possuem a vantagem de
nãoapresentareminterfaeentreosmateriaisdainlusãoedamatriz,oquereduz
um problema omum em materiais ompostos que é o surgimento de trinas ou
danos nessas interfaes.
Osmateriais MGFsapresentam uma maiordurabilidade (Qiu et al.2003), o
que motivou a utilização dos métodos de otimização no projeto da distribuição
das matrizes de materiais, para obter uma gradação ótima dos MGFs. O
trabalho realizado por Cho & Choi (2004) onsidera a otimização da fração de
volume de ada fase de material dentro do domínio, para a redução do nível de
tensão térmia. O projeto de estruturas MGFs utilizandoa OT foi onsiderado
iniialmentepor Turteltaub (2001),Turteltaub (2002a) eTurteltaub (2002b),no
primeiro trabalho é obtido uma distribuição de temperatura, para uma plaa
sujeita aarregamentos térmios, porémesse trabalhoonsidera apenasoampo
térmio, e nos demais, onsideram o problema termo-elástio transiente. Já,
Paulino & Silva (2005) apliaram o oneito de MGFs no projeto de estruturas
visando a maximizaçãodarigidez utilizandoo MOT.
Reentemente, ooneitodemateriaisMGFstemsidoexploradoemmateriais
piezelétrios, om o objetivo de aumentar a vida útildos atuadores piezelétrios
(Almajid et al. 2001, Qiu et al. 2003). Em geral, as propriedades elástias,
piezelétrias edielétrias são gradadas ao longo daespessura das piezoerâmias
MGFs. Nesse sentido, os transdutores piezelétrios que apresentam o melhor
desempenho são ompostos de dois ou mais materiais,omoé o aso doatuador
piezelétrio tipo bilaminar (Elka et al. 2004) ou rainbow (Haertling 1994). Os
trabalhos desenvolvidos (Almajid et al. 2001, Zhifei 2002) tem mostrado que a
gradação das propriedades da piezoerâmia MGF inueniam no desempenho
dos atuadores piezelétrios,omo, por exemplo,nos desloamentosgerados. Um
tensõesnotransdutor. Quando doisoumais materiaissão utilizadoshápresença
deinterfaes,oqueprovoaonentraçãodetensões, reduzindosigniativamente
avidaàfadiga, eportanto,avidaútildotransdutor (Qiuetal.2003). Portanto,
a utilização de MGF piezelétrios tem permitidomelhorar o desempenho desses
transdutores unindo a vantagem da variação das propriedades no interior do
domínio (eliminando as interfaes de material) om suavização da distribuição
de tensões (Almajid &Taya 2001, Shin etal. 2004).
Portanto, nessa tese também foi estudado o oneito de piezoerâmias
MGFsapliadoaoprojetode nanoposiionadoresemiromanipuladores(omoos
ilustradosnaFigura1.1),noqualonsidera-seaotimizaçãoonjuntadaestrutura
multiexíveledagradação ótimadapiezoerâmiasMGF.Veria-se quedevido
agradaçãodaspropriedadesnessaspiezoerâmias,asmesmastendemaexionar
ao serem exitadas. Portanto, o objetivo é explorar essa deformação de exão
no desenvolvimento dos nanoposiionadores e miromanipuladores utilizando o
MOT, para gerar maiores desloamentos om o menor aoplamento entre os
movimentos. Este trabalho tem grande potenial para aumentar a gama de
apliações de MGFs naárea de atuadores piezelétrios.
1.3 Objetivo
O objetivo desse trabalho é estudar a apliação do MOT no projeto
genério e sistemátio de multi-atuadores piezelétrios denominados de MAPs
(Multi-Atuadores Piezelétrios), LOMPs (Loalização Ótima do Material
Piezelétrio), MAPs MGFs,e BilaminaresMGFs.
No projeto dos MAPs deseja-se obter uma formulação que permita gerar
vários movimentosde atuação,minimizandoosmovimentosaoplados,exitando
duas ou mais piezoerâmias om potenial elétrio. A formulação dos MAPs
onsidera a loalização das regiões piezoerâmias xas e suas loalizações
são dadas no projeto. Dessa forma, deidiu-se otimizar através do MOT a
loalização do material piezelétrio onjuntamente om a estrutura exível,
gerando o projeto denominado de LOMPs. Nesta formulação foi adiionada
uma variável de projeto que permite obter o ângulo ótimo entre as direções do
ampoelétrioedapolarização. Comisto,aumentou-seaexibilidadede projeto
dos nanoposiionadores piezelétrios, o que permite analisar a potenialidade
do MOT na obtenção dos resultados, pois nesta formulação o problema possui
atuadores piezelétrios denominadosde MAPs MGFs e Bilaminares MGFs. Nos
MAPs MGFs e Bilaminares MGFs é estudado omo a distribuição de materiais
nas regiões MGFs inueniam o desempenho dos mesmos, omo, por exemplo,
analisando a maximização dos desloamentos dos movimentos de atuação e a
minimização dos movimentos aoplados. Partiularmente, o projeto dos MAPs
MGFs pretende analisar omo a gradação das regiões MGFs inueniam na
topologia da estrutura multi-exível. Em ambos os projetos deseja-se analisar
a inuênia dos parâmetros da formulação do problema de OT, nas respostas
obtidas para diversos domíniosde projeto.
Alémdos objetivosde estudarasformulaçõesnumérias, pretende-sefabriar
protótipos utilizandoos resultados gerados om a formulação dos MAPs. Dessa
forma,serápossívelompararosresultadosgeradosdaformulaçãonumériaom
os experimentais, e portanto,validar a metodologia de projeto dos MAPs.
No nal deste trabalho, espera-se ontribuir om ferramentas genérias e
sistemátias apazes de projetar atuadores piezelétrios para diversas funções
e áreas de apliações.
1.4 Contribuições Cientías
Comodesritonaintroduçãodesteapítulo,osdispositivospiezelétriosainda
são desenvolvidos baseado na intuição físia do projetista. Isso demonstra a
potenialidadeeaneessidadedodesenvolvimentodemétodosomoospropostos
nesse trabalho, que permitem explorar novas apliações desses dispositivos na
Meânia de Preisão, eem outrasáreas em quesejam neessárias. Atualmente,
asprinipaisáreasde apliaçãosão amiromanipulaçãoeonanoposiionamento,
utilizando as piezoerâmias omo material de transformação da energia
elétria (exitado om voltagem) em meânia (desloamento gerados na
ordem de nanometros). Além disso, esse trabalho realizou o ilo ompleto
de desenvolvimento de atuadores piezelétrios tipo MAPs (projeto, análise,
fabriação e veriação). Este tema teve grande aeitação na omunidade
ientía internaional, permitindo estabeleer interação om pesquisadores de
outros países.
Resumidamente, esta tese de doutorado apresenta asseguintes ontribuições
ientías:
sistemátiaegenériadeprojetobaseadonoMOT,parananoposiionadores
e miromanipuladores piezelétrios. Os resultados numérios, omo, por
exemplo, um nanoposiionador
XY
, uma mirogarra om 3 movimentosde atuação, e um nanoposiionador om 4 movimentos de atuação são
apresentados. ApósodesenvolvimentodaformulaçãodosMAPs,opróximo
passo foi projetar e fabriar vários dispositivos piezelétrios que foram
araterizados utilizandoténias de interferometria laser;
2. Desenvolvimentodaformulaçãodos LOMPs (Carbonari,Silva&Nishiwaki
2007), que destaa as seguintes ontribuições: a introdução de uma
metodologiadeprojetodoMOTquepermiteobterumatuadorpiezelétrio,
om a loalização ótima do material piezelétrio, onjuntamente om o
projeto da estrutura exível no domínio de projeto; formulação de um
modelodematerialquepermitiuadistribuiçãodematerialnão-piezelétrio,
piezelétrioevazionodomíniode projeto; noasodomaterialpiezelétrio,
foi empregado omo variável de projeto o ângulo de rotação entre as
direções de polarização do material piezelétrio e do ampo elétrio; e a
apresentação de projetos de atuadores piezelétrios obtidos utilizando o
métododesenvolvido.
3. O onheimento adquirido nos trabalhos anteriores possibilitou o
desenvolvimento dos MAPs MGFs (Carbonari et al. 2006), onde
destaam-se as seguintes ontribuições: formulação empregada no projeto
dos MAPs MGFs, no qual é otimizado onjuntamente a estrutura
multi-exível e a gradação das regiões MGFs, no problema de OT;
formulação de um modelo de material que permite a distribuição de
materiais não-piezelétrios, piezelétrios nas regiões MGFs, e materiais
não-piezelétrios e vazio na estrutura multi-exível; no aso do material
piezelétrio,foiempregadauma variáveldeprojeto quepermiteamudança
no sentido da polarização do material piezelétrio e do ampo elétrio;
apresentação dos resultados numériospara osMAPs MGFs;
4. A formulação dos MAPs MGFs foi apliada no projeto dos Bilaminares
MGFs(Carbonari,Silva&Paulino2007)paraobteragradaçãoótimaentre
doismateriais(PiezelétrioePiezelétrio,ouPiezelétrioenão-Piezelétrio)
através do MOT, o que tornou a metodologia de projeto desenvolvida
sistemátia e genéria, destaando-se as seguintes ontribuições: obtenção
através da formulação desenvolvida a gradação ótima através do MOT
material; adição de uma variável de projeto que permite mudar o sentido
da polarização do material piezelétrio e do ampo elétrio; e por m,
apresentação dos projetos de atuadores bilaminaresMGFs.
1.5 Organização da Tese
No Capítulo2é dada uma abordagemresumida dos métodos de otimização,
e posteriormente, éfeitoum detalhamentodoMOT, destaando-se, uma revisão
bibliográa sobre OT (Seção 2.2), os oneitos prinipaisdo MOT (Seção2.3),
e onsiderações sobre o método e seus problemas numérios, nas Seções 2.5 e
2.6, respetivamente. NosCapítulos3e4estãodesritos osprojetosdos MAPse
LOMPs,respetivamente,ondesãoabordadosomodelodematerial,aformulação
do problema da OT na forma ontínua e disreta, e os resultados obtidos. Na
Seção3.4sãoapresentadososresultadosnumérioseexperimentaisdosprotótipos
fabriados dos atuadores MAPs. Os projetos apresentados nos Capítulos 5 e 6
inluem o oneito MGF na formulação da OT no desenvolvimento dos MAPs
MGFs e Bilaminares MGFs, respetivamente. Nesses apítulos são desritos a
formulaçãodeOTutilizadaeomoooneitoMGFfoiapliadonaOT,bemomo
osresultadosobtidos. ComooprojetodosBilaminaresMGFséumasopartiular
daformulação desenvolvidapara osMAPs MGFs. NoCapítulo6são detalhados
apenas os pontos prinipais da formulação desse problema. Finalmente, no
Capítulo7 enontram-seas onlusões e observações gerais sobre essa tese, bem
omo são apresentados propostas de trabalhos futuros.
Os textos omplementares para entendimento da tese são apresentados em
apêndies. Nos apêndies A e B estão desritos os oneitos de piezeletriidade
e do MEF piezelétrio, respetivamente. No apêndie C é desrita a formulação
básia da transdução média utilizada nas formulações desritas nessa tese. No
apêndie D está desrito a teoria da PLS (Programação Linear Seqüenial)
utilizada nos programas desenvolvidos. Os protótipos dos MAPs fabriados
e não-araterizados estão ilustrados no apêndie F, e a desrição da ténia
interferométria utilizada,bemomo os proedimentosde montagem dos MAPs
2 Método de Otimização
Topológia
A otimização de estruturas meânias busa a melhor onguração possível
de maneira a atender uma função objetivo espeia. Desta forma, onsidere
o exemplo desrito na Figura 2.1 para o problema de otimização estrutural. O
problema onsiste em enontrar a estrutura otimizada om a máxima rigidez
om o mínimo volume de material, para as mesmas ondições de arregamento
e restrições meânias, apliadas à estrutura. Existem essenialmente três
abordagens para solução desse problema de otimização estrutural.
A primeira ategoria de otimização estrutural (ver Figura 2.1(a)) onsiste
em assumir para a estrutura uma forma xa previamente denida, neste aso,
a estrutura está disretizada om elementos de treliça, onde as araterístias
geométrias, omo por exemplo, a área da seção transversal de ada elemento
são as variáveis de projeto do problema, ou seja, os parâmetros que podem ser
alterados paraotimizaraestrutura. Essa abordageméonheidaporotimização
paramétria(Vanderplaats1984). Assim,utilizandoumalgoritmoomputaional
deotimizaçãoparaenontrarasáreasindividuaisdeadaelementodetreliça,que
maximiza a rigidez da estrutura respeitando a restrição de volume, obtém-se o
resultado mostrado na Figura2.1(b).
A segunda ategoria é a otimização de forma (ver Figura 2.1()), onde os
ontornosexternos einternosdaestrutura são parametrizados porurvassplines
e os parâmetros dessas urvas onstituem as variáveis de projeto. Através de
um algoritmo omputaional de otimização são determinados os parâmetros
ótimos das urvas splines, e onseqüentemente a forma ótima da estrutura (ver
Figura2.1(d))quemaximizaarigidezparaum dadovolume (Haftkaetal.1990).
Isto aumenta o espaço de solução, sendo um método mais geral do que o
último, e portanto uma maior maximização da função objetivo é esperado. No
entanto, a prinipal desvantagem da otimização de forma é omo lidar om a
F
(a)DomíniodeProjeto (b)ResultadoObtido
F
()Domínio deProjeto (d)ResultadoObtido
F
(e)Domínio deProjeto (f)ResultadoObtido
Figura 2.1: Exemplo de 3 ategorias de otimização estrutural: (a)e (b)
otimizaçãoparamétria; () e (d) otimização de forma,e (e) e (f) otimização
topológia.
(MEF) (Bathe 1995) é utilizado para analisar a estrutura durante o proesso
de otimização,sefaz neessárioutilizaralgoritmosde remalhamento,esehouver
umagrandemudançanaformadodomínioa extremamentedifíilmanteruma
malha razoável sem elementosmuito deformados.
Finalmente, a última ategoria onsiste em se obter a onguração ótima,
busandoenontraradistribuiçãoótimadematerialnointeriordaestrutura(ver
Figura2.1(e)),de talformaa permitirariação de buraos nas regiõesondenão
houveraneessidade dematerial(verFigura2.1(f)). Essa abordageméhamada
de otimização topológia(OT). As variáveisde projetopodem ser, por exemplo,
medidas que indiam a distribuição de material em ada ponto do domínio. A
OT é a mais genéria, sendo que a quantidade de material removida e o valor
nal da função objetivo são maiores do que nos outros métodos de otimização,
onseqüentemente, obtém-se a estrutura mais leve e om melhor desempenho.
Existem vários algoritmos para a solução da otimização, disponíveis para
problemas não-lineares om restrições (Vanderplaats 1984, Haftka et al. 1990).