Universidade Federal do Rio Grande do Norte
Centro de Ciˆencias Exatas e da Terra
Programa de P´os-Gradua¸c˜ao em Matem´atica Aplicada e Estat´ıstica
Marcio Lemos do Nascimento
Unicidade e discretiza¸
c˜
ao para problemas de valor
inicial
Marcio Lemos do Nascimento
Unicidade e discretiza¸
c˜
ao para problemas de valor
inicial
Trabalho apresentado ao Programa de P´os-Gradua¸c˜ao em Matem´atica Aplicada e Estat´ıstica da Universidade Federal do Rio Grande do Norte, em cumprimento com as exigˆencias legais para obten¸c˜ao do t´ıtulo de Mestre.
´
Area de Concentra¸c˜ao: Modelagem Ma-tem´atica
Orientador:
Prof. Dr. Nir Cohen
Resumo
O presente trabalho tem dois objetivos: (i) a realiza¸c˜ao de uma pesquisa bi-bliogr´afica sobre os crit´erios de unicidade de solu¸c˜ao para problemas de valor inicial de equa¸c˜oes diferenciais ordin´arias. (ii) Introduzir uma modifica¸c˜ao do m´etodo de Euler que parece ser capaz de convergir a uma das solu¸c˜oes do problema, caso a solu¸c˜ao n˜ao seja ´unica.
Abstrat
This paper has two objectives: (i) conducting a literature search on the criteria of uniqueness of solution for initial value problems of ordinary differential equations. (ii) a modification of the method of Euler that seems to be able to converge to a solution of the problem, if the solution is not unique.
Lista de Figuras
2.1 infinite solutions translated. . . 6
2.2 gr´afico de ˙x em fun¸c˜ao de x . . . 7
2.3 gr´afico de x em fun¸c˜ao de t. . . 7
2.4 solu¸c˜ao do PVI - fun¸c˜ao cont´ınua passando pelo ponto inicial. . . 8
2.5 f =p|x| n˜ao ´e localmente lipschitziana no ponto (0,0). . . 12
4.1 linha poligonal composta por segmentos de reta . . . 39
4.2 Sequˆencia de solu¸c˜oes te´oricas (xδ(t)) convergindo parax∗(t) . . . 45
4.3 cruzamento de solu¸c˜oes . . . 46
4.4 xb(t) n˜ao ´e maior que a solu¸c˜ao m´axima x∗(t) . . . 47
4.5 Sanduiche em x∗(t) . . . 49
4.6 xδ =x(t+τh) . . . 53
4.7 Euler converge para a solu¸c˜ao constante x1(t)≡0 . . . 54
4.8 convergˆencia para a primeira solu¸c˜ao positiva x∗(t) = t2. . . 55
4.9 H´a paralelismo nas solu¸c˜oes do PVI autˆonomo. . . 56
4.10 N˜ao h´a paralelismo nas solu¸c˜oes do PVI n˜ao autˆonomo. . . 57
4.11 Euler converge para a solu¸c˜ao constante x1(t)≡0 . . . 58
4.12 convergˆencia para a primeira solu¸c˜ao positiva x∗(t) = t4. . . 58
4.13 sequˆencia de aproxima¸c˜oes (xδ) . . . 59
B.1 Euler converge para a solu¸c˜ao m´ınima x(t)=t. . . 65
Sum´
ario
1 Introdu¸c˜ao 2
2 Conceitos preliminares 4
2.1 Equa¸c˜ao diferencial ordin´aria - EDO . . . 5
2.1.1 EDO autˆonoma . . . 5
2.2 Problema de valor inicial - PVI . . . 8
2.3 solu¸c˜ao do Problema de valor inicial . . . 8
2.3.1 Existˆencia, Solu¸c˜oes M´axima e M´ınima . . . 9
2.4 Fun¸c˜ao cont´ınua e lipschitziana . . . 11
2.5 Princ´ıpio da Contra¸c˜ao . . . 13
2.6 Teorema de Taylor . . . 14
2.7 Teorema da fun¸c˜ao inversa . . . 15
3 Existˆencia e Unicidade 16 3.1 Teorema da existˆencia de Peano . . . 16
3.2 Crit´erios de Unicidade . . . 18
3.2.1 Teorema de Picard . . . 18
3.2.2 A condi¸c˜ao Lipschitz com respeito `a t . . . 24
3.2.3 Caso n˜ao autˆonomo com f(t0, x0)6= 0 e f n˜ao decrescente emt . 26 3.2.4 Condi¸c˜ao Lipschitz unilateral . . . 26
3.2.5 Teorema de unicidade de Peano . . . 27
3.2.6 Condi¸c˜ao de Osgood . . . 28
3.2.7 Integral divergente . . . 34
1
3.2.9 Vari´aveis separ´aveis . . . 35
3.2.10Condi¸c˜ao de Majorana . . . 36
4 M´etodos num´ericos para resolu¸c˜ao de EDO 38 4.1 O m´etodo de diferen¸cas finitas . . . 38
4.2 O m´etodo de Euler . . . 38
4.2.1 Erro local e erro global . . . 40
4.2.2 Covergˆencia do m´etodo de Euler para o caso de n˜ao unicidade . . 43
4.2.3 O caso de vari´aveis separ´aveis . . . 50
4.2.4 caso autˆonomo . . . 52
4.3 Um exemplo . . . 53
4.3.1 Uma EDO autˆonoma . . . 54
4.3.2 Mudan¸ca de vari´avel . . . 55
4.3.3 Uma EDO n˜ao autˆonoma . . . 57
5 Conclus˜ao 60
A M´etodo de Euler no Matlab 63
B Um exemplo de PVI com mais de uma solu¸c˜ao e nenhuma delas ´e
a solu¸c˜ao constante 65
Cap´ıtulo 1
Introdu¸
c˜
ao
Considere o problema de valor inicial
˙
x=f(t, x)
x(t0) = x0 (1.1)
De acordo com a literatura, se a fun¸c˜aof ´e cont´ınua ent˜ao existe solu¸c˜ao para (1.1), enquanto que se a fun¸c˜ao ´e localmente lipschitziana em rela¸c˜ao `a segunda vari´avel segue-se que (1.1) possui solu¸c˜ao ´unica. Al´em disso, sob a mesma condi¸c˜ao Lipschitz, ´e garantida a convergˆencia dessa solu¸c˜ao pelo m´etodo de Euler.
Podemos supor sempre a condi¸c˜ao inicial na origem pois, “se o ponto inicial for outro, podemos sempre fazer uma mudan¸ca preliminar de vari´aveis, correspondente a uma transla¸c˜ao dos eixos de coordenadas, e trazer o ponto dado (t0, x0) para a origem” [3].
Ent˜ao, entenda-se este procedimento como uma forma de simplifica¸c˜ao quando usarmos o ponto (0,0) ao inv´es de (t0, x0).
Neste trabalho cont´em duas contribui¸c˜oes. Na primeira (Cap´ıtulo 3) Apresen-tamos uma pesquisa bibliogr´afica sobre v´arias extens˜oes da condi¸c˜ao Lipschitz que ainda garantem a unicidade da solu¸c˜ao. Na segunda, consideramos o caso de falta de unicidade. Aqui, conforme [13] sempre existem uma solu¸c˜ao local m´axima x∗(t)
e uma solu¸c˜ao local m´ınimax(t) tal que toda solu¸c˜ao com a mesma condi¸c˜ao inicial satisfaz
x(t)≤x(t)≤x∗(t). (1.2)
3
Este fato significa que n˜ao podemos esperar que o m´etodo de Euler, ou de maneira similar, m´etodos conhecidos de aproxima¸c˜ao, como os m´etodos de Runge-Kutta, possam ser utilizados sem a garantia da unicidade.
“No entanto, a fim de aplicar um ou outro m´etodo de integra¸c˜ao aproximada de uma equa¸c˜ao diferencial, ´e necess´ario primeiro ter a certeza da existˆencia da solu¸c˜ao desejada e tamb´em da unicidade da solu¸c˜ao, porque na ausˆencia de unicidade n˜ao ser´a clara qual solu¸c˜ao a ser determinada” [8].
Um ex-aluno da Unicamp, Artur Gower, sugeriu um procedimento capaz de fazer o m´etodo de Euler convergir `as outras solu¸c˜oes. A id´eia ´e, usando malha uni-forme h no algoritmo, come¸car com valor inicial perturbado ¯x0 =δ =chα >0. Ele
acreditava que, ao variar c ∈ (0,1] e α ≥ 1, ele conseguiria convergir a todas as solu¸c˜oes do PVI.
Por´em, em v´arias simula¸c˜oes que fizemos, usando o matlab, sempre houve con-vergˆencia para x∗(t), independente dos c e α escolhidos. Se este fato for verdade,
ent˜ao a estabilidade do algoritmo de Euler, que ´e garantida no caso Lipschitz, pode-ria ser estendida a casos bem mais gerais, no sentido de convergˆencia do algoritmo com condi¸c˜ao inicial modificada para a solu¸c˜ao m´aximax∗(t). Assim pode-se formar
a seguinte afirma¸c˜ao: qualquer m´etodo de aproxima¸c˜ao do PVI (1.1) converge para a maior solu¸c˜ao x∗(t), se ele for modificado usando uma condi¸c˜ao inicial
infinitesi-malmente positiva.
Conseguimos provar teoricamente esta afirma¸c˜ao, nos teoremas 4.2.3 e 4.2.5 onde mostram que as solu¸c˜oes te´oricas e n´um´ericas do PVI
˙
x=f(t, x)
x(0) =δ (1.3)
Cap´ıtulo 2
Conceitos preliminares
A busca pelo entendimento f´ısico e matem´atico de diversos problemas da natu-reza tem sido de grande interesse por parte da comunidade cient´ıfica, dentre os quais est˜ao os problemas t´ecnicos e cient´ıficos descritos matematicamente por equa¸c˜oes di-ferenciais as quais representam varia¸c˜oes das quantidades f´ısicas que os descrevem.
A Teoria das Equa¸c˜oes Diferenciais Ordin´arias (equa¸c˜oes que s´o apresentam derivadas ordin´arias - em rela¸c˜ao a uma vari´avel) ´e objeto de intensa atividade de pesquisa por apresentar aspectos puramente matem´aticos e um grande n´umero de aplica¸c˜oes provenientes da mecˆanica, qu´ımica, biologia, etc.
Muitos problemas encontrados em engenharia e outras ciˆencias podem ser for-mulados em termos de equa¸c˜oes diferenciais. Por exemplo, trajet´orias bal´ısticas, trajet´oria dos sat´elites artificiais, estudo de redes el´etricas, curvaturas das vigas, es-tabilidade de avi˜oes, teoria das vibra¸c˜oes, rea¸c˜oes qu´ımicas e outras aplica¸c˜oes est˜ao relacionadas com equa¸c˜oes diferenciais [11].
2.1 Equa¸c˜ao diferencial ordin´aria - EDO 5
dos m´etodos num´ericos, no nosso caso o m´etodo de Euler, que converge para uma solu¸c˜ao t˜ao pr´oxima da solu¸c˜ao exata quanto menor for o passo da malha do dom´ınio temporal discretizado.
Tratamos de reunir neste cap´ıtulo alguns conceitos e defini¸c˜oes importantes que ser˜ao necess´arios para o desenvlvimento e entendimento do nosso trabalho.
2.1 Equa¸
c˜
ao diferencial ordin´
aria - EDO
Uma equa¸c˜ao diferencial ordin´aria ´e uma equa¸c˜ao que cont´em uma ´unica fun¸c˜ao inc´ognita f, dependente de uma vari´avel x e um n´umero finito de deriva-das def [12].
Ela ´e dita de primeira ordem quando a primeira derivada, ˙x ´e a maior que ocorre.
2.1.1 EDO autˆ
onoma
Consideremos a equa¸c˜ao
˙
x=f(x), (2.1)
em que f : R→R ´e dita de classe C1. Quando f n˜ao depende explicitamente de t
´e dita autˆonoma.
Teorema 2.1.1. Se x ´e solu¸c˜ao de (2.1) no intervalo (a, b) e t1 ´e um n´umero real qualquer, ent˜ao a fun¸c˜aox(t) =x(t+t1)´e solu¸c˜ao de (2.1) no intervalo(a−t1, b−t1).
Demonstra¸c˜ao:
Note que x(t) =x(t+t1)⇒x˙(t) = ˙x(t+t1) =f(x(t+t1)) =f(x(t)).
Uma consequˆencia imediata desse teorema ´e que, se x(t) ´e solu¸c˜ao do PVI
˙
x=f(x)
x(t0) =x0 (2.2)
ent˜ao, para qualquert0 ∈R, a fun¸c˜aox(t) = x(t−t0) ´e solu¸c˜ao do PVI (2.2). Exemplo 2.1.1.Considere o problema de valor inicial
˙
x= 2√x
2.1 Equa¸c˜ao diferencial ordin´aria - EDO 6
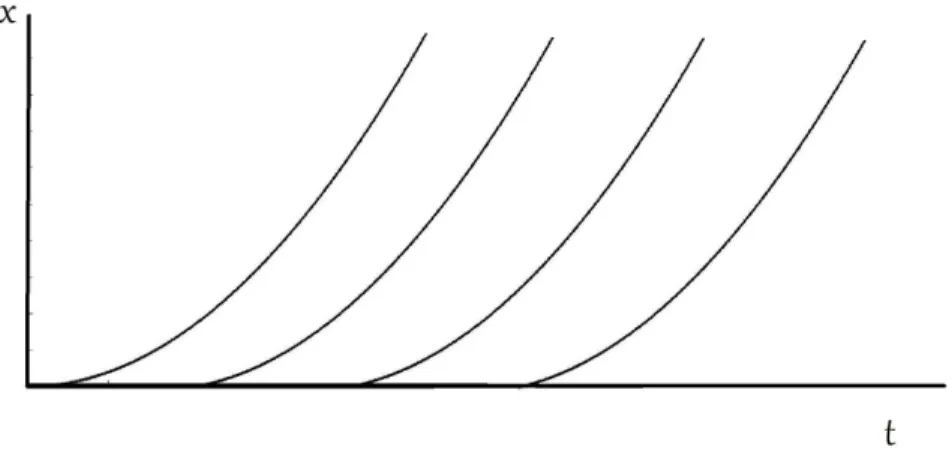
As solu¸c˜oes de (2.3) s˜ao x1(t) = t2 e x2(t)≡ 0. Note que para qualquer transla¸c˜ao no eixot, i.e., x1(t) = (t−c)2, t≥c´e tamb´em solu¸c˜ao de (2.3), ver Teorema 2.1.1. Portanto oP V I (2.3) possui infinitas solu¸c˜oes. Veja que parat= 0 temos a solu¸c˜ao que ´e diferente da contante e bifurca na origem, a essa solu¸c˜ao chamaremos, no nosso trabalho, de primeira solu¸c˜ao.
Figura 2.1 infinite solutions translated.
As equa¸c˜oes diferenciais autˆonomas s˜ao bastante utilizadas nos modelos que governam a dinˆamica populacional, entre outras aplica¸c˜oes. E com elas podemos fazer uma an´alise qualitativa do comportamento de suas solu¸c˜oes, atrav´es de uma an´alise geom´etrica das mesmas e em seguida esbo¸car fam´ılia de solu¸c˜oes.
Exemplo 2.1.2.Considere a equa¸c˜ao autˆonoma
˙
x= (a−bx)x (2.4)
que tem a forma
˙
x=f(x)
ondef ´e a fun¸c˜ao f(x) = (a−bx)x. Ver figura 2.2.
Note que x1 = 0 e x2 = ab s˜ao as ra´ızes da fun¸c˜ao f e portanto solu¸c˜oes cons-tantes da equa¸c˜ao diferencial (2.4). Analisando o gr´afico da figura 2.2, onde temos ˙x em fun¸c˜ao dex, vamos esbo¸car o gr´afico de x em fun¸c˜ao det, que mostra a fam´ılia das solu¸c˜oes de (2.4).
2.1 Equa¸c˜ao diferencial ordin´aria - EDO 7
Figura 2.2 gr´afico de x˙ em fun¸c˜ao de x
0< x < ab. Isto significa que no gr´afico da figura 2.3, na faixa 0< x < ab, as solu¸c˜oes x s˜ao fun¸c˜oes crescentes. Analogamente, para x > a
b, temos ˙x < 0. Logo, na faixa
x > a
b do gr´afico da figura 2.3, as solu¸c˜oes xs˜ao decrescentes.
Na figura 2.3, esbo¸camos as solu¸c˜oes de 2.4 a partir dessas informa¸c˜oes.
Figura 2.3 gr´afico de x em fun¸c˜ao de t
Perceba que como mostra o gr´afico da figura 2.2, ˙x´e m´aximo quando x= 2ab. Portanto as solu¸c˜oes tˆem m´axima declividade quando x = a
2b. Conclu´ımos da´ı que
as solu¸c˜oes dentro da faixa 0< x < a
b tˆem ponto de inflex˜ao sobre a reta horizontal
2.2 Problema de valor inicial - PVI 8
2.2 Problema de valor inicial - PVI
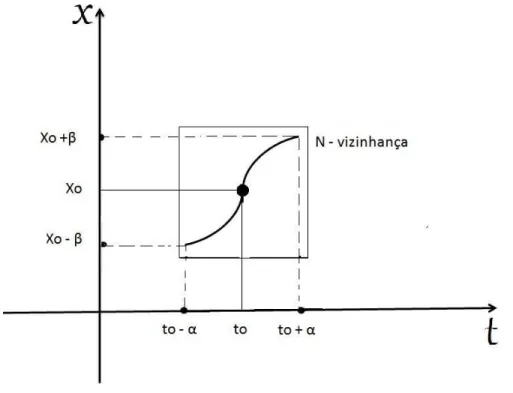
Um problema de valor inicial ´e uma equa¸c˜ao diferencial com a exigˆencia de que a solu¸c˜ao passe pelo ponto inicial (t0, x0).
Figura 2.4 solu¸c˜ao do PVI - fun¸c˜ao cont´ınua passando pelo ponto inicial.
2.3 solu¸
c˜
ao do Problema de valor inicial
Uma fun¸c˜ao real x definida emI ⊂R ´e designada por solu¸c˜ao doP V I
˙
x=f(t, x)
x(t0) = x0, t ∈ I (2.5)
se,
• x˙(t) existe para t∈I;
• x˙(t) =f(t, x(t)), t∈I e
2.3 solu¸c˜ao do Problema de valor inicial 9
2.3.1 Existˆ
encia, Solu¸
c˜
oes M´
axima e M´ınima
O pr´oximo resultado foi encontrado em [13].
Defini¸c˜ao 2.3.1. Sejaf(t, x)uma fun¸c˜ao cont´ınua em ℜ. Por uma solu¸c˜ao m´axima x=x∗(t) de
˙
x=f(t, x)
x(t0) =x0 (2.6)
entenda-se como uma solu¸c˜ao de (2.6) em um intervalo m´aximo de existˆencia tal que se x(t) ´e uma solu¸c˜ao de (2.6), ent˜ao
x(t)≤x∗(t) (2.7)
mant´em-se num intervalo comum de existˆencia de x e x∗. A solu¸c˜ao m´ınima ´e
si-milarmente definida.
Teorema 2.3.1. Seja x, f ∈ R e f0(t, x), f1(t, x), f2(t, x),· · · uma sequˆencia de
fun¸c˜oes cont´ınuas no retˆangulo ℜ:{t0 ≤t ≤t0+a,|x−x0| ≤b} tal que
f0 = lim
n→∞fn unif ormemente em ℜ. (2.8)
Seja xn(t) uma solu¸c˜ao de
˙
x=fn(t, x), x(tn) =xn, (2.9)
em [t0, t0+a], onden = 1,2,· · · , e
2.3 solu¸c˜ao do Problema de valor inicial 10
Ent˜ao existe uma subsequˆencia xn1(t), xn2(t),· · · que ´e uniformemente convergente em [t0, t0+a]. E para qualquer tal subsequˆencia o limite
x0(t) = lim
k→∞xnk(t) (2.11)
´e uma solu¸c˜ao de (2.9) em [t0, t0 +a]. Em particular, se (2.9) possui uma ´unica solu¸c˜ao x=x0(t) em [t0, t0+a], ent˜ao
x0(t) = lim
n→∞xn(t) unif ormemente em [t0, t0+a]. (2.12)
Lema 2.3.2. Seja f(t, x) cont´ınua no retˆangulo
ℜ:{t0 ≤t ≤t0+a, |x−x0| ≤b};
seja |f(t, x)| ≤ M e α = min(a,Mb ). Ent˜ao (2.6) tem uma solu¸c˜ao x = x0(t) em [t0, t0+α] com a propriedade de que toda solu¸c˜aox=x(t)dex˙ =f(t, x), x(t0)≤x0 satisfaz (2.7) em [t0, t0 +α].
Demonstra¸c˜ao: Seja 0< α′
< α. Ent˜ao, pelo Teorema ??,
˙
x=f(t, x) + n1
x(t0) =x0 (2.13)
tem uma solu¸c˜aox=xn(t) em um intervalo [t0, t0+α
′
] sen´e suficientemente grande. Pelo Teorema 2.3.1, existe uma sequˆencia de n1 < n2 <· · · tal que
x0(t) = lim
k→∞unk(t) (2.14)
existe uniformemente em [t0, t0+α
′
] e ´e a solu¸c˜ao de (2.6).
Ser´a verificado que (2.7) mant´em em [t0, t0+α′]. Para isto ´e suficiente verificar que
x(t)≤xn(t) em [t0, t0 +α
′
] (2.15)
2.4 Fun¸c˜ao cont´ınua e lipschitziana 11
t=t1, t0 < t1 < t0 +α
′
tal que x(t1)> xn(t1). Uma vez que existe um maior t2 em [t0, t1), ondex(t2) = xn(t2), de modo que x(t)> xn(t) em (t2, t1]. Mas (2.13) implica
que ˙xn(t2) = ˙x(t2) + n1, de modo que xn(t)> x(t) para t > t2 pr´oximo de t2. Esta
contradi¸c˜ao prova (2.15). Uma vez queα′
< α ´e arbitr´ario, o lema segue.
2.4 Fun¸
c˜
ao cont´ınua e lipschitziana
A fun¸c˜ao f : X → R ´e cont´ınua no ponto a ∈ X quando, para todo ǫ > 0
dado arbitrariamente, pudermos acharδ >0 tal quex∈X e|x−a|< δ impliquem
|f(x)−f(a)|< ǫ. Simbolicamente:
∀ǫ >0∃ δ >0;x∈X,0<|x−a|< δ ⇒ |f(x)−f(a)|< ǫ.[15]
Em rela¸c˜ao a escala de suavidade, toda fun¸c˜ao lipschitziana ´e cont´ınua, dize-mos ent˜ao que a condi¸c˜ao de Lipshitz ´e mais forte do que a continuidade.
Teorema 2.4.1. Seja f :ℜ ⊂R2. Diremos que f(t, x) ´e lipschitziana relativamente
a x em ℜ se existir uma constante L >0 tal que
|f(t, x1)−f(t, x2)| ≤L|x1−x2|, ∀(t, x1),(t, x2)∈ ℜ (2.16)
Diremos quef(t, x) ´e localmente lipschitziana relativamente axquandof(t, x) for lipschitziana em uma vizinhan¸ca de cada (t0, x0)∈ ℜ.
Exemplo 2.4.1.A fun¸c˜ao ˙x= 2xsen(t) ´e lipschitziana emR2 pois
|f(t, x1)−f(t, x2)|= 2|sen(t)| |x1−x2| ≤2|x1−x2|. (2.17)
Exemplo 2.4.2. A fun¸c˜ao f(x) = p|x| n˜ao ´e lipschitziana no ponto x = 0, ver figura (2.5).
Para ver isto, escolha ǫ > 0, pegue x1 = ǫ2 e x2 = 4ǫ2 e suponha que f ´e Lipchitz. Como x1, x2 ∈ ℜ= [−1,1] , deve existir uma constante L tal que
L≥
f(x1)−f(x2) x1−x2
=
ǫ−2ǫ ǫ2−4ǫ2 =
ǫ 3ǫ2 =
1
3ǫ → ∞ (2.18)
2.4 Fun¸c˜ao cont´ınua e lipschitziana 12
Figura 2.5 f =p|x|n˜ao ´e localmente lipschitziana no ponto (0,0).
x= 0.
Exemplo 2.4.3. A fun¸c˜ao f(x) = x2, x ∈ [−1,1] ´e localmente lipschitziana mas n˜ao globalmente. Esta fun¸c˜ao ´e de classeC1.
De fato, para todo x0 ∈R,
sup
x ∈ (x0−1,x0+1)
f′(x)= sup
x ∈ (x0−1,x0+1)
|2x| ≤2(|x0|+ 1) (2.19)
Agora pegue dois pontos y, z ∈ (x0 −1, x0 + 1), segue-se pelo Teorema do valor m´edio que existe algumξ entre y ez, tal que
|f(z)−f(y)|=f˙(ξ)(z−y)≤ sup
θ ∈ (x0−1,x0+1)
f˙(θ)|z−x| (2.20)
Usando (2.19) conclu´ımos que
|f(z)−f(y)| ≤(2|x0|+ 1)(z−x), ∀ z, y ∈ (x0−1, x0 + 1) (2.21)
Uma vez que a constante de Lipschitz def em (x0−1, x0+ 1) ´eL= 2|x0|+ 1 e a fun¸c˜ao ´e localmente Lipschitz cont´ınua em todoR.
Observe que a constante Lipschitz depende dex e sua vizinhan¸ca. Em particular se x0 → ∞ent˜ao L→ ∞.
2.5 Princ´ıpio da Contra¸c˜ao 13
|f(y)−f(0)|
|y−0| ≤ |y| → ∞, quando y→ ∞ (2.22)
N˜ao existeL que satisfa¸ca a condi¸c˜ao de Lipschitz global.
2.5 Princ´ıpio da Contra¸
c˜
ao
Um dos teoremas mais importantes em discuss˜oes de convergˆencia e unicidade de algoritmos ´e o Teorema do ponto fixo de Banach ou princ´ıpio da contra¸c˜ao, utili-zado na demonstra¸c˜ao do Teorema de existˆencia de solu¸c˜ao para problema de valor inicial.
Sejam (M, d) e (N, d1) dois espa¸cos m´etricos. Uma aplica¸c˜ao f : M → N ´e dita contra¸c˜ao se existe 0≤k <1 tal que
d1(f(x), f(y))≤kd(x, y), ∀x, y ∈ M. (2.23)
Teorema 2.5.1. Sejam (M, d) um espa¸co m´etrico completo e f : M → M uma contra¸c˜ao. Ent˜ao,f possui um ´unico ponto fixo em M. Al´em disso, dado x0 ∈M a sequˆencia definida por
x1 =f(x0), xn+1 =f(xn), n≥0. (2.24)
´e uma sequˆencia convergente e limn→∞xn =a ´e ponto fixo de f.
Demonstra¸c˜ao: Se a sequˆencia (xn) definida acima converge para a ∈ M,
ent˜ao como f ´e cont´ınua temos
f(a) =f(limxn) = limf(xn) = limf(xn+1) = a. (2.25)
Logo a´e ponto fixo de f.
Sef tem dois pontos fixos a e b, ent˜ao temos
d(a, b) =d(f(a), f(b))≤kd(a, b), (2.26) o que ´e absurdo, a menos que a=b. Logo, a=b.
Resta provar que a sequˆencia (xn) converge. Notemos que d(x1, x2) ≤ kd(x0, x1) e
2.6 Teorema de Taylor 14
d(xn, xn+p)≤d(xn, xn+1) +· · ·+d(xn+p−1, xn+p) (2.27)
≤[kn+kn+1+· · ·+kn+p−1]d(x0, x1) (2.28) kn
1−kd(x0, x1) (2.29)
Como o limkn = 0 segue que a sequˆencia ´e de Cauchy e portanto convergente, o que
completa a prova do Teorema.
2.6 Teorema de Taylor
Teorema 2.6.1. Seja f : [a, b]→R, onde fn ´e cont´ınua, ou seja, uma fun¸c˜ao com
n derivadas cont´ınuas e f(n+1) definida em todo (a, b). Sejam x0, x ∈ [a, b] ent˜ao existec∈(x0, x) tal que
f(x) =
n
X
k=1
fk(x0)
k! (x−x0)
k+ fn+1(c)
(n+ 1)!(x−x0)
n+1 (2.30)
O Teorema de Taylor ´e uma extens˜ao do Teorema do Valor m´edio. Isto ´e, se considerarmos n= 1 teremos que
f(x) =f(x0) +f′(c)(x−x0)⇒ f(x)−f(x0) (x−x0)
=f′(c). (2.31)
Demonstra¸c˜ao: Denotemos por
G(t) =f(x)−f(t)−
n
X
k=1
f(k)(t)
k! (x−t)
k+A(x
−t)n+1 (2.32)
Onde A ´e de tal forma que G(x0) = 0. Portanto teremos que G(x) = G(x0) = 0. Pelo Teorema de Rolle existec∈(x, x0) tal queG′
(c) = 0. DerivandoGencontramos
G′(t) =−f′(t)−
n X k=1 d dt
f(k)(t)
k! (x−t)
k
−(n+ 1)A(x−t)n (2.33)
Lembrando das f´ormulas das derivadas de um produto teremos que
G′(t) =−f′(t)−
n
X
k=1
f(k+1)(t)
k! (x−t)
k
− f
(k)(t)
(k−1)!(x−t)
k−1
2.7 Teorema da fun¸c˜ao inversa 15
Note que o somat´orio anterior ´e telesc´opico, portanto
G′(t) = f
(n+1)(t)
n! (x−t)
n
−(n+ 1)A(x−t)n ⇒ f
(n+1)(c)
(n!) (x−c)
n = (n+ 1)A(x
−c)n (2.35) Tomandot=c, segue-se que
A= f
(n+1)(c)
(n+ 1)! (2.36)
Tomandot=x0 e aplicando o fato que G(x0) = 0 obtemos o resultado.
Lema 2.6.2. [4] Para todo x≥ −1 e m positivo,
0≤(1 +x)m ≤emx. (2.37)
2.7 Teorema da fun¸
c˜
ao inversa
Teorema 2.7.1. Seja f uma fun¸c˜ao cujo dom´ınio ´e um intervalo aberto I, suponha quef ´e diferenci´avel emI, e suponha quef′
(c)6= 0 para todo n´umerocem I. Ent˜ao f tem uma inversa g, g ´e diferenci´avel, e
g′(x) = 1 f′
[g(x)] (2.38)
Cap´ıtulo 3
Existˆ
encia e Unicidade
Neste cap´ıtulo tratamos de reunir todas as informa¸c˜oes referente aos crit´erios de unicidade para Problemas de valor inicial para EDO´s de primeira ordem. Dado um PVI,
˙
x=f(t, x)
x(t0) = x0 (3.1)
se a fun¸c˜aof for cont´ınua o Teorema de Peano garante a existˆencia de pelo menos uma solu¸c˜ao, enquanto que se ela for localmente lipschitziana em rela¸c˜ao a segunda vari´avel, ent˜ao o problema tem solu¸c˜ao ´unica. Mas, sob certas condi¸c˜oes sobre f ou at´e mesmo no valor inicial podemos determinar a existˆencia de unicidade para (3.1). “enquanto a unicidade do problema (3.1) tem sido investigado em muitos artigos, resultados tratando da n˜ao unicidade tem sido dado somente por poucos autores [16].”
Por solu¸c˜ao do P V I (3.1), queremos dizer uma fun¸c˜ao real diferenci´avel x(t) definida em algum intervalo [t0, t0+α], satisfazendo a condi¸c˜aox(t0) = x0 e tal que a derivada ˙x existe e ´e igual a f(t, x(t)) em cada pontox∈[t0, t0+α].
3.1 Teorema da existˆ
encia de Peano
Teorema 3.1.1. Sejax, f ∈R;f(t, x)cont´ınua no retˆanguloℜ:{t0 ≤t≤t0+a,|x−x0| ≤b};
|f(t, x)| ≤M em ℜ, α =min(a, b
M). Ent˜ao (2.6)
possui pelo menos uma solu¸c˜ao x=x(t) em [t0, t0+α], [13].
Exemplo 3.1.1.: Considere o problema de valor inicial
˙ x= 2x
t
3.1 Teorema da existˆencia de Peano 17
Se
• x(0) = 0, ent˜ao o P V I (3.2) tem infinitas solu¸c˜oes, i.e., x(t) =ct2, c∈R.
• x(0) =x0 6= 0, ent˜ao o P V I (3.2) n˜ao tem solu¸c˜ao.
• x(t0) =x0, t0 6= 0, ent˜ao o P V I (3.2) tem solu¸c˜ao ´unica.
Como j´a ´e bem conhecido a continuidade def(t, x) no retˆanguloℜ´e suficiente para a existˆencia de pelo menos uma solu¸c˜ao de (3.1) no intervalo Jα : |t−t0| ≤
α= min(a,Mb ), ondeM = supℜ|f(t, x)|. No entanto, sef(t, x) ´e descont´ınua ent˜ao
a natureza das solu¸c˜oes ´e arbitr´aria. Por exemplo, o problema de valor inicial
˙
x= 2(xt−1)
x(0) = 0 (3.3)
n˜ao tem solu¸c˜ao; enquanto que o problema
˙
x= 2(xt−1)
x(0) = 1 (3.4)
tem um n´umero infinito de solu¸c˜oesx(t) = 1+ct2, ondec´e uma constante arbitr´aria.
Embora, continuidade de f(t, x) seja suficiente para a existˆencia de solu¸c˜ao de (3.1), isso n˜ao implica a unicidade de solu¸c˜oes. Por exemplo, a fun¸c˜ao f(t, x) = x23 ´e cont´ınua em R2, mas o problema
˙ x=x23
x(0) = 0 (3.5)
tem um n´umero infinito de solu¸c˜oes x(t)≡0, e
x(t) =
(
0, 0≤t≤c (t−c)3
27 , t≥c
onde c´e uma constante arbitr´aria. No ano de 1995 Lavrentieff dar um exemplo de uma fun¸c˜ao cont´ınua f(t, x) no retˆangulo aberto
N ⊂ ℜ:{|t−t0| ≤a,|x−x0| ≤b}
3.2 Crit´erios de Unicidade 18
N, o problema de valor inicial (3.1) tem mais de uma solu¸c˜ao em todo o intervalo [t0, t0+ǫ] e [t0−ǫ, t0]. Al´em disso, no ano de 1963 [13] usou um m´etodo um pouco similar ao de Kampen e construiu uma outra fun¸c˜ao cont´ınuaf(t, x)∈R2 de modo que o problema (3.1) tem a mesma propriedade de n˜ao unicidade. Por isso, para garantir a unicidade precisamos tamb´em, al´em da continuidade alguma condi¸c˜ao adicional emf(t, x).
3.2 Crit´
erios de Unicidade
3.2.1 Teorema de Picard
Teorema 3.2.1. Seja o retˆangulo ℜ uma vizinhan¸ca do ponto (t0, x0)∈ R2 e seja f : ℜ → R cont´ınua em ℜ. Se f satisfaz a condi¸c˜ao de Lipschitz com respeito `a segunda vari´avel em ℜ, i.e.,
∃ L >0 tal que (t, x1),(t, x2)∈ ℜ ⇒ |f(t, x1)−f(t, x2)| ≤L|x1−x2|, (3.6)
ent˜ao o problema de valor inicial (3.1) tem uma ´unica solu¸c˜ao [6].
Note que para garantir a unicidade de solu¸c˜oes de (3.1) come¸camos com a suposi¸c˜ao de que a varia¸c˜ao da fun¸c˜aof(t, x) relativa axpermanece limitada. para todo (t, x1),(t, x2) em ℜ tendo o mesmo t. A constante L ´e chamada de constante Lipschitz.
A condi¸c˜ao de Lipschitz est´a entre a continuidade e a diferenciabilidade de f com respeito ax. De fato, de (3.6) a continuidade def com respeito ax´e ´obvia, e a fun¸c˜ao cont´ınuaf(t, x) =x23 viola a condi¸c˜ao de Lipschitz em qualquer dom´ınio que contenhax = 0. Entretanto, f(t, x) = |x|, x∈R2 ´e Lipschitz mas n˜ao diferenci´avel em x=0. Se a fun¸c˜ao f ´e diferenci´avel com respeito a x, ent˜ao ´e f´acil calcular a constanteL. De fato, provaremos.
3.2 Crit´erios de Unicidade 19 sup ℜ
∂f∂x(t, x)
≤L. (3.7)
Demonstra¸c˜ao: Uma vez que f(t, x) ´e diferenci´avel com respeito a x e o dom´ınio N ´e convexo, para todo (t, x1),(t, x2) ∈ N o Teorema do valor m´edio for-nece
f(t, x1)−f(t, x2) = ∂f(t, x
∗)
∂x (x1−x2), (3.8)
ondemin{x1, x2}< x∗ < max{x1, x2}. Assim, usando (3.7) em (3.9), encontramos
(3.6). Reciprocamente, de (3.6) temos
∂f∂x(t, x)
= limx2→x1
f(t, x1(x)1−−xf2()t, x2)
≤L. (3.9)
Teorema 3.2.3. (Variante do Teorema de Picard, o caso C1) Seja f :ℜ →R uma fun¸c˜ao cont´ınua em ℜ. Suponhamos que a derivada parcial com rela¸c˜ao `a segunda vari´avel, f′
: ℜ → R, seja cont´ınua tamb´em. Ent˜ao, para cada (t0, x0) ∈ ℜ, existe
um intervalo aberto I contendo t0 e uma ´unica fun¸c˜ao diferenci´avel x(t) : I → R com (t, x(t))∈ ℜ, para todot ∈I, que ´e solu¸c˜ao do problema de valor inicial (PVI)
˙
x=f(t, x)
x(t0) =x0 (3.10)
Demonstra¸c˜ao: A fun¸c˜ao x(t) : I → R ´e solu¸c˜ao de (3.10) se e somente se, for
solu¸c˜ao da equa¸c˜ao integral
x(t) =x0+
Z t
t0
f(s, x(s))ds, t∈I (3.11)
Para ver isto, note que ˙x(t) = f(t, x), ou seja, a derivada da equa¸c˜ao inte-gral (3.11) ´e uma fun¸c˜ao de t e x. E ainda que x(t0) = x0 +Rt0
3.2 Crit´erios de Unicidade 20
Reciprocamente, se x(t) : I ∈ R ´e uma fun¸c˜ao cont´ınua que ´e solu¸c˜ao da equa¸c˜ao
integral (3.11), ent˜ao, pelo Teorema Fundamental do C´alculo,x(t) ´e diferenci´avel e ´e tamb´em solu¸c˜ao do problema de valor inicial (3.10).
Concentremo-nos, pois na resolu¸c˜ao da equa¸c˜ao integral (3.11). Dado (t0, x0)∈ ℜ, tomemos a e b positivos tais que o retˆangulo
ℜ=(t, x)∈R2;|t−t0| ≤a e |x−x0| ≤b (3.12)
Esteja inteiramente contido em ℜ. Como f ´e cont´ınua e ℜ ´e compacto , ent˜ao f ´e limitada emℜ, Seja
M =max{|f(t, x)|; (t, x)∈ ℜ}.
Tome
0≤α≤min
a, b M
e o intervalo
jα = [t0−α, t0+α].
Seja
C ={g;g :jα → R continua, g(t0) =x0 e|g(t)−x0| ≤b}. (3.13)
Definimos em C a seguinte m´etrica:
d(g1, g2) =max{|g1(t)−g2(t)|:t∈jα}; (3.14)
´e f´acil verificar que (3.14) ´e de fato, uma m´etrica, isto ´e, tem-se as propriedades:
• i) d(g1, g2)≥0, e d(g1, g2) = 0 se e s´o seg1 =g2;
• ii) d(g1, g2) =d(g2, g1) e
• iii) d(g1, g2)≤d(g1, g3) +d(g3, g2).
Segue-se que (C, d) ´e um espa¸co m´etrico. Mais ainda, (C, d) ´e um espa¸co m´etrico completo, isto ´e, toda sequˆencia de Cauchy ´e convergente.
(gn) ´e de Cauchy se dadoǫ >0 existirn0 tal que d(gn, gm)< ǫpara n, m > n0. Uma sucess˜ao (gn) converge parag ∈C se dadoǫ >0 existirn0 tal qued(gn, g)< ǫ,
3.2 Crit´erios de Unicidade 21
O espa¸co m´etricoC definido no par´agrafo anterior ´e completo, o que se prova simplesmente observando que a convergˆencia na m´etricad´e a convergˆencia uniforme de fun¸c˜oes e lembrando que o limite uniforme de fun¸c˜oes cont´ınuas ´e uma fun¸c˜ao cont´ınua.
De (3.11). observamos que toda solu¸c˜ao deve ser ponto fixo da aplica¸c˜ao dada porg ∈C →φ(g) onde
φ(g)(t) =x0+
Z t
t0
f(s, x(s))ds. (3.15)
Note que φ(g) ´e cont´ınua em jα eφ(g)(t0) =x0. Al´em disso,
|φ(g)(t)−x0| ≤
Z t t0
f(s, g(s))ds
≤M|t−t0| ≤M α≤b (3.16)
e portantoφ(g)∈C. Logo temos que
φ:C →C. Por outro lado, se g1 e g2 pertencem a C temos que
|φ(g1)(t)−φ(g2)(t)| ≤
Z t
t0
|f(s, g1(s))−f(s, g2(s))|ds. (3.17)
Como f ´e lipschitziana na vari´avelx, existe uma constante positiva L tal que
|φ(g1)(t)−φ(g2)(t)| ≤
Z t
t0
L|g1(s)−g2(s)|ds≤Lαd(g1, g2). (3.18)
Segue que
d(φ(g1), φ(g2))≤Lαd(g1, g2). (3.19)
Tomando α tal que Lα < 1 conclu´ımos que φ ´e uma contra¸c˜ao. Pelo Te-orema da contra¸c˜ao, φ tem um ´unico ponto fixo e o teorema fica provado com
I = (t0 −α, t0+α).
Apenas a continuidade de f garante a existˆencia de solu¸c˜ao mas n˜ao a unici-dade. Para obtermos unicidade ´e preciso alguma condi¸c˜ao adicional.
Agora vamos provar que se duas solu¸c˜oes x1 e x2 coincidem em algum ponto t=t0 ent˜ao elas coincidir˜ao em todos os valores de t em que estiveram definidas.
3.2 Crit´erios de Unicidade 22
I2, respectivamente. Suponha t0 ∈ I1 ∩I2 e x1(t0) = x2(t0) = x0. Ent˜ao, x1 e x2 coincidem em todos os valores de t ∈I1∩I2.
Demonstra¸c˜ao: Sejam x1 =ϕ(t) e x2 =φ(t) duas solu¸c˜oes satisfazendo
ϕ(t0) =φ(to) =x0. (3.20)
SejaJ = (r1, r2) =I1∩I2 o intervalo em queϕ(t) e φ(t) est˜ao definidas. Seja
W ={t;t ∈J e ϕ(t) =φ(t)}. (3.21) Note queW ´e n˜ao vazio poist0 ∈ ℜ. Mostraremos queℜ´e aberto e fechado em J e comoJ ´e conexo teremos que J =W.
Seja (tn) uma sequˆencia de elementos de W convergente parat ∈J.
Assim, ϕ(tn) = φ(tn). Como ϕ e φ s˜ao cont´ınuas temos que ϕ(t) = φ(t), segue que
t∈W. Logo, W ´e fechado em J.
Seja t1 ∈W. Ent˜ao, temos que ϕ(t1) = φ(t1) =x1. Resolvendo o problema de valor inicial com o par (t1, x1), o Teorema de existˆencia e unicidade nos d´a α eb tal queLα <1. Podemos escolher, usando a continuidade de ϕ eφ, α tal que
|ϕ(t)−φ(t)| ≤b, (3.22)
com |t−t1|< α.
Como ϕ e φ s˜ao solu¸c˜oes temos que
ϕ(t) =x1 +
Z t
t1
f(s, ϕ(s))ds, (3.23)
φ(t) =x1 +
Z t
t1
f(s, φ(s))ds. (3.24)
Para |t−t1|< α obtemos
|ϕ(t)−φ(t)|=L
Z t
t1
|ϕ(s)−φ(s)|ds≤bLα. (3.25)
Voltando na desigualdade anterior obtemos
|ϕ(t)−φ(t)| ≤b(Lα)2. (3.26) Repetindo o argumento,segue-se que
3.2 Crit´erios de Unicidade 23
Para todo n ≥ 1. Como Lα < 1 obtemos que ϕ(t) = φ(t) para todo |t−t1| < α. Logo, existe uma vizinhan¸ca de t1 onde ϕ(t) e φ(t) coincidem, isto ´e, W ´e aberto. ComoW ´e n˜ao vazio, aberto e fechado em J e J ´e conexo, segue que W =J.
Tamb´em pode-se provar unicidade para (3.10) usando a desigualdade de Gronwall, [14], usada por exemplo na demonstra¸c˜ao da condi¸c˜ao de unicidade de Osgood, que veremos mais adiante. Que ´e um dos resultados mais simples e ´util envolvendo uma desigualdade integral [13].
Teorema 3.2.5. (Desigualdade de Gronwall) Sejamu(t)ev(t)fun¸c˜oes n˜ao-negativas e cont´ınuas em[a, b]; c > 0 uma constante; e
v(t)≤c+
Z t
a
v(s)u(s)ds para a ≤t≤b. (3.28)
Ent˜ao
v(t)≤ceRatu(s)ds para a ≤t≤b; (3.29)
em particular, sec= 0, ent˜ao v(t) = 0.
Demonstra¸c˜ao: Caso (i), c >0. Denotamos V(t) o lado direito de (3.28), de modo que
v(t)≤V(t), V(t)≥c >0 em [a, b]. (3.30) Tamb´em,
˙
V(t) =u(t)v(t)≤u(t)V(t). (3.31) Desde que V >0, V˙
V ≤u, eV(a) = c, uma integra¸c˜ao em [a, t] d´a
V(t)≤ceRatu(s)ds. (3.32) Assim (3.29) resulta de v(t)≤V(t).
3.2 Crit´erios de Unicidade 24
3.2.2 A condi¸
c˜
ao Lipschitz com respeito `
a t
O pr´oximo teorema encontrado em [6] estabelece equivalˆencia entre unicidade de solu¸c˜ao do problema de valor inicial (3.1) e unicidade para um problema rec´ıproco, duplicando assim, a aplicabilidade do Teorema de unicidade.
Teorema 3.2.6. Seja o retˆangulo ℜ uma vizinhan¸ca do ponto (t0, x0) ∈ R2 e seja
f :ℜ →R2 cont´ınua em ℜ.
Se f(t0, x0)6= 0, ent˜ao (3.1) tem uma ´unica solu¸c˜ao se, e somente se, o problema
˙
t= f(t,x1 )
t(x0) = t0 (3.33)
tem uma ´unica solu¸c˜ao t(x).
Demonstra¸c˜ao: Uma vez que f(t0, x0) 6= 0 e f cont´ınua em (t0, x0), existe uma vizinhan¸ca de (t0, x0) ondef tem sinal constante e ´e limitada. Para simplificar, assumimos quef e f1 tˆem sinal constante e s˜ao limitadas em ℜ.
Para estabelecer o resultado vamos usar a seguinte afirma¸c˜ao que ´e interessante em si mesma:
Afirma¸c˜ao: Se X ´e uma solu¸c˜ao de (3.1) ent˜ao X−1 ´e solu¸c˜ao de (3.33) e, in-versamente, seT ´e um solu¸c˜ao de (3.33) ent˜ao T−1 ´e uma solu¸c˜ao de (3.1).
Seja X :I → R uma solu¸c˜ao de (3.1); para todo t ∈ I temos (t, X(t)) ∈N e ˙
X(t) =f(t, X(t)), assim ˙X tem sinal constante em I, em particular, ela tem uma inversa X−1 : X(I) → R. vamos assim mostrar que T = X−1 resolve (3.33). Pri-meiro,X(I) ´e um intervalo que cont´emx0 eT(x0) = t0; segundo, usamos o Teorema de diferencia¸c˜ao de fun¸c˜oes inversas para todo x∈X(I) obtem-se que
˙
T(x) = (X)−1(x) = 1 ˙
X(X−1(x)) = 1 f(T(x), x).
A prova da inversa ´e an´aloga, assim a omitimos, e afirmamos est´a provada.
Finalmente, suponha que X ´e a ´unica solu¸c˜ao de (3.1) no intervalo I = [t0 −α, t0 +α], para algum α > 0. Vamos provar que X−1 ´e a ´unica solu¸c˜ao de (3.33) no intervalo J = [x0 −β, x0 +β] desde que β > 0 seja t˜ao pequena que J ⊂ X(I) e se T ´e qualquer solu¸c˜ao para (3.33) definida no intervalo ˜J ⊂ J ent˜ao T( ˜J)⊂I (tal escolha deβ´e poss´ıvel porque 1
3.2 Crit´erios de Unicidade 25
de (3.33) no intervalo ˜j ⊂ j. Uma vez que T−1 ´e uma solu¸c˜ao de (3.1) em T( ˜J) e T( ˜J) ⊂I, concluimos que T−1 =X em T( ˜J). Por isso T =X−1 em ˜J. Argumento an´alogo mostra que unicidade para (3.33) implica unicidade para (3.1).
Corol´ario 3.2.7. Seja ǫ > 0, f : (x0 −ǫ, x0 + ǫ) → R cont´ınua, e t0 ∈ R. Se f(x0)6= 0 ent˜ao o problema autˆonomo
˙
x=f(x)
x(t0) =x0 (3.34)
tem solu¸c˜ao ´unica.
Mostraremos em seguida, atrav´es de um exemplo, que para o caso n˜ao autˆonomo a condi¸c˜aof(t0, x0)6= 0 n˜ao ´e suficiente para unicidade.
Exemplo 3.2.1.: Considere
˙
x= 3(x−t)23 + 1
z(0) = 0 (3.35)
com condi¸c˜ao inicial f(0,0) = 1 6= 0 e seja f(t, x) cont´ınua. A escolha da vari´avel x=z+t transforma o problema autˆonomo
dz
dt = 3z
2 3
z(0) = 0 (3.36)
com solu¸c˜oes
z(t) = (t−c)3, t ≥c
z(t) = 0, t≤c (3.37)
em um problema n˜ao autˆonomo (3.35), cujas solu¸c˜oes s˜ao:x1(t) =t ex2(t) = t3+t. Portanto (3.35) admite 2 solu¸c˜oes diferentes.
Teorema 3.2.8. Seja a fun¸c˜ao g(x) cont´ınua em |x−x0| < b. Al´em disso, seja o problema de valor inicial
˙
x=g(x) x(t0) =x0
(3.38)
3.2 Crit´erios de Unicidade 26
Demonstra¸c˜ao:Suponhax1(t) ex2(t) duas solu¸c˜oes de (3.38) emU :|t−t0|< ǫ. Sejag(x0)6= 0, ent˜ao existe uma vizinhan¸caV dex0 em queg(x) ´e limitada longe de zero. Seja W : |t−t0| < ǫ1 ≤ ǫ tal que x1(W) ⊂ V e x2(W) ⊂ V. Para t ∈W, definimos G(t) =Rx2(t)
x1(t)
dt
g(t). Obviamente, se x1(t) 6=x2(t) para algum t ∈W, ent˜ao G(t)6= 0. Mas, para todo x∈W
˙
G(t) = x2˙ (t) g(x2(t)) −
˙ x1(t) g(x1(t)) = 0.
Portanto, G(t) ´e constante emW. No entanto, uma vez que G(t0) = 0 segue-se que G(t) = 0, t∈W. Esta contradi¸c˜ao completa a prova.
3.2.3 Caso n˜
ao autˆ
onomo com
f
(
t
0, x
0)
6
= 0
e
f
n˜
ao decrescente
em
t
Seja ℜ uma vizinhan¸ca do ponto (t0, x0) ∈ R2 e seja f : ℜ → R cont´ınua em ℜ. Se f(t0, x0) 6= 0 e, al´em disso, f ´e n˜ao decrescente com rela¸c˜ao `a primeira vari´avel (i.e., f(s, x)≤ f(t, x)) para todo (s, x),(t, x) ∈ N e s ≤t, ent˜ao (3.1) tem uma ´unica solu¸c˜ao [6].
3.2.4 Condi¸
c˜
ao Lipschitz unilateral
Teorema 3.2.9. Unicidade para frente no tempo para (3.1)se verifica se a condi¸c˜ao de continuidade Lipschitz(2.16)no Teorema2.4.1´e Substitu´ıda pela seguinte condi¸c˜ao Lipschitz unilateral:
(f(t, x1)−f(t, x2)).(x1−x2)≤K|x1−x2|2 para todo(t, x1),(t, x2)∈ ℜ, (3.39)
Por “para frente no tempo”, queremos dizer o seguinte: duas solu¸c˜oes x1 e x2 para (3.1) que por defini¸c˜ao satisfaz x1(t0) =x2(t0) =x0, coincide para t > t0. Ob-serve que a condi¸c˜ao Lipschitz unilateral n˜ao garante unicidade para tr´as no tempo, uma vez que n˜ao ´e invariante sob uma invers˜ao do sinal detna equa¸c˜ao, que equivale a uma mudan¸ca de sinal de f [7].
3.2 Crit´erios de Unicidade 27
a condi¸c˜ao Lipschitz unilateral podemos estimar
˙
r(t) = 2(x1(t)−x2(t)).(f(t, x1(t))−f(t, x2(t))) (3.40)
≤K|x1(t)−x2(t)|2 =Kr(t). (3.41) Isto implica que
d dt[r(t)e
−Kt] =e−Kt[ ˙r(t)
−Kr(t)]≤0, (3.42)
assim que
0≤r(t)e−Kt
≤r(t0)e−Kt0 = 0 para todo t≥t0, (3.43)
implicando quex1(t) = x2(t).
3.2.5 Teorema de unicidade de Peano
Discutiremos agora o Teorema de unicidade de Peano que assume uma condi¸c˜ao aparentemente diferente na f(t, x), tais como crescimento ou decrescimento no que diz respeito `ax.
Teorema 3.2.10. (Teorema de unicidade de Peano). Seja f(t, x) cont´ınua emℜ+: t0 ≤ t ≤ t0 +a,|x−x0| ≤ b e n˜ao crescente em x para cada t fixo em [t0, t0 +a]. Ent˜ao, o problema de valor inicial (3.1)tem no m´aximo uma solu¸c˜ao em [t0, t0+a]. [1]
Demonstra¸c˜ao:Suponhax1(t) ex2(t) duas solu¸c˜oes de (3.1) as quais diferem em algum lugar em [t0, t0+a]. Assumimos que,
x2(t)> x1(t) para algum t2 ∈ (t0, t0+a), (3.44) e sejat1 o maior ponto em em [t0, t2) tal que
x1(t) = x2(t) em t1. (3.45)
Assim, x2(t)> x1(t) em (t1, t2).
Assim, para todo t∈(t1, t2), temos
3.2 Crit´erios de Unicidade 28
e por isso
˙
x1(t)≥x2˙ (t). (3.47)
Isto implica que a fun¸c˜ao
φ(t) =x2(t)−x1(t) (3.48) ´e n˜ao crescente. Al´em disso, uma vez que φ(t1) = 0, temos φ(t) ≤ 0 em [t1, t2], O que contradiz o fato que φ(t) = x2(t)−x1(t) > 0. Esta contradi¸c˜ao prova que
x1(t) =x2(t) em [t0, t0+a].
O resultado acima ´e na verdade um caso particular do Teorema da condi¸c˜ao de Lipschitz unilateral quando a constante de Lipschitz for igual a zero.
O “n˜ao crescimento” def no teorema acima n˜ao pode ser substitu´ıda por “n˜ao decrescimento”.
3.2.6 Condi¸
c˜
ao de Osgood
Unicidade para (3.1) ´e garantida se a condi¸c˜ao de continuidade Lipschitz (2.16) no Teorema 2.4.1 ´e Substitu´ıda pela seguinte condi¸c˜ao de Osgood, na qual apre-sentaremos duas provas diferentes, mas antes demonstraremos o seguinte Teorema encontrado em [1].
Teorema 3.2.11.Sejawuma fun¸c˜ao cont´ınua e n˜ao decrescente no intervalo[0,∞) e w(0) = 0, w(z)>0 para z >0. Al´em disso,
limǫ→0+
Z α
ǫ
dz
w(z) =∞, α > 0. (3.49)
Seja φ(t) uma fun¸c˜ao cont´ınua n˜ao negativa em [0, a]. Ent˜ao,
φ(t)≤
Z t
0
w(φ(τ))dτ, 0 < t ≤a (3.50)
implica queφ(t) = 0 em [0, a].
3.2 Crit´erios de Unicidade 29
Φ(t) = max 0≤τ≤t φ(τ)
e assuma que Φ(t)>0 para 0< t≤a. Ent˜ao,
φ(t)≤Φ(t) e para cadat existe um t1 ≤t tal que
φ(t1) = Φ(t).
Da´ı, temos
Φ(t) =φ(t1)≤
Z t1
0
w(φ(τ))dτ ≤
Z t
0
w(Φ(τ))dτ, (3.51)
i.e., a fun¸c˜ao crescente Φ(t) satisfaz a mesma desigualdade que φ(t). Vamos definir
¯ Φ(t) =
Z t
0
w(Φ(τ))dτ,
ent˜ao ¯Φ(0) = 0, Φ(t)≤Φ(¯ t) e ¯
Φ′(t) =w(Φ(t))≤w( ¯Φ(t)). Da´ı, para 0< δ < a, temos
Z a
δ
¯ Φ′
(t)
w( ¯Φ(t))dt ≤ a − δ < a. (3.52) No entanto de (3.49), segue-se que
Z a
δ
¯ Φ′(t) w( ¯Φ(t))dt=
Z α
ǫ
dz
w(z), Φ(¯ δ) = ǫ, Φ(¯ a) =α (3.53)
torna-se infinita quandoǫ→0 (δ→0). Esta contradi¸c˜ao mostra que Φ(t) n˜ao pode ser positiva e assim Φ(t)≡0, e φ(t) = 0 em [0, a].
Teorema 3.2.12. (teorema de Osgood) Sejaf(t, x)cont´ınua emℜpara todo(t, x1),(t, x2)∈
ℜ ela satisfaz a condi¸c˜ao de Osgood
|f(t, x1)−f(t, x2)| ≤w(|x1−x2|), (3.54)
3.2 Crit´erios de Unicidade 30
no m´aximo uma solu¸c˜ao em [t−t0]≤a.
Provemos este teorema de duas maneiras diferentes.
A Primeira demonstra¸c˜ao encontrada em [1]. Suponhax1(t) ex2(t) duas solu¸c˜oes de (3.1) em [t−t0]≤a. Devemos mostrar quex1(t) = x2(t) em [t0, t0+a]. De (3.54) segue-se que
|x1(t0+t)−x2(t0+t)| ≤
Z t0+t
t0
|f(t, x1(τ))−f(t, x2(τ))|dτ, (3.55)
≤
Z t0+t
t0
w(|x1(τ)−x2(τ)|)dτ (3.56)
=
Z t
0
w(|x1(z+t0)−x2(z+t0)|)dz. (3.57)
Parat em [0, a], vamos definirφ(t) =|x1(t+t0)−x2(t+t0)|. Ent˜ao, a fun¸c˜ao cont´ınua n˜ao negativa φ(t) satisfaz a desigualdade (3.50), e portanto, o Teorema 3.2.11 implica queφ(t) = 0 em [0, a], i. e.,x1(t) = x2(t) em [t0, t0+a]. Se t est´a em [t0−a, t0] ent˜ao a prova permanece a mesma exceto que precisamos definir a fun¸c˜ao φ(t) = |x1(t0−t)−x2(t0−t)| em [0, a].
E a Segunda demonstra¸c˜ao encontrada em [7]. Consideremosr(t) =|x1(t)−x2(t)|2. Temosr(t0) = 0 e assumimos por contradi¸c˜ao que r(t)>0 parat ∈(t0, t0+a) para alguma >0.
˙
r(t) = 2(x1(t)−x2(t)).( ˙x1(t)−x2˙ (t)) (3.58) = 2(x1(t)−x2(t)).(f(t, x1(t))−f(t, x2(t))). (3.59) Usando a condi¸c˜ao de Osgood e integrando em rela¸c˜ao a t obtemos
r(t)≤2
Z t
t0
p
r(s)w(r(s))ds. (3.60)
Uma vez que estamos assumindo que pr(s) = |x1(t)−x2(t)| ∈ L1(t0, t0 +a) e aplicamos uma extens˜ao do lema de Gronwall, segue-se o seguinte. Defina
R(t) = 2
Z t
t0
p
r(s)w(r(s))ds. (3.61)
3.2 Crit´erios de Unicidade 31
˙
R(t) = pr(t)w(r(t))≤pr(t)w(R(t)), (3.62)
onde a ´ultima desigualdade resulta de (3.60) da qual obtemos
˙ R(t) w(R(t)) ≤
p
r(t) t > t0. (3.63)
Vamos definir
Ω(z) =
Z 1
z
1
w(r)dr (3.64)
e observamos que Ω(z) est´a bem definida para z > 0, satisfaz ˙Ω(z) = −1
w(z) e Ω(z)↑ +∞ quando z ↓0, devido a condi¸c˜ao de Osgood. Integrando (3.63) deduzimos que para todot0 < s < t temos
−Ω(R(t)) + Ω(R(s))≤
Z t
s
p
r(τ)dτ, (3.65)
que, contudo, n˜ao se pode garantir para s muito perto de t. De fato, uma vez que R(s)↓ 0 quandos ↓t0, neste caso ter´ıamos Ω(R(s))↑+∞ quando s↓ t0 enquanto
a integral no lado direito permanece finita.
No Teorema 3.2.12 a condi¸c˜ao de que a fun¸c˜ao w´e n˜ao decrescente ´e um fato sup´erfluo. Para mostrar isso veremos o seguinte resultado que de certo modo com-plementa o Teorema 3.2.14.
Teorema 3.2.13. Seja a fun¸c˜ao w(x) > 0 cont´ınua para x0 < x ≤ x0 +β para algum β > 0 e w(x0) = 0. Al´em disso, seja a integral Rxα
0+ǫ
dz
w(z) divergente quando ǫ→0+. Ent˜ao, o problema de valor inicial
˙
x=w(x)
x(t1) =x1 (3.66)
onde x0 < x1 ≤ x0 +β tem uma ´unica solu¸c˜ao. Esta solu¸c˜ao x(t) ´e tal que x0 < x(t)≤ x0+β e tende para x0 quando t → −∞. Al´em disso, se Rx0+ǫwdz(z) converge quando ǫ→0+, ent˜ao existe um n´umero infinito de solu¸c˜oes de (3.38).
3.2 Crit´erios de Unicidade 32
Z x(t)
x1 dz
g(z) = (t−t1). (3.67)
Uma vez que w(x) est´a definida somente para x0 ≤ x ≤ x0 +β, ´e necess´ario que x0 ≤ x(t) ≤ x0 +β. De (3.67) e o fato de que w ´e cont´ınua e w(x) > 0 para x0 < x≤ x0+β, encontramos que x(t) existe enquanto x0 < x(t)≤x0+β. J´a que a equa¸c˜ao (3.67) define somente candidatos para uma solu¸c˜ao (implicitamente), e uma vez que por substitui¸c˜ao direta d´a uma solu¸c˜ao, segue-se que para (3.66), (3.67) define a solu¸c˜ao ´unica.
Para mostrar que limt→−∞x(t) =x0, onde
lim
ǫ→0+
Z x1
x0+ǫ dz
w(z) =∞ (3.68)
procedemos como segue. O lado esquerdo de (3.67) ´e finito, desde que x0 < x(t)≤ x0+β. Como a integral (3.68) diverge, esta solu¸c˜ao x(t) n˜ao pode tornar-sex0 para um valor finito det e ao mesmo tempo satisfazer (3.67). Assim, x0 < x(t)≤x0+β para todo t < t1. Quando t → −∞ o lado direito de (3.67) tende para −∞, e por-tanto limt→−∞x(t) =x0.
Desde que w(x0) = 0, claramente x(t) ≡ x0 ´e uma solu¸c˜ao de (3.38). Se existe uma outra solu¸c˜ao φ(t) de (3.38) tal que x0 < φ(t) ≤ x0 +β para t 6= t0, ent˜ao segue-se que
lim
ǫ→0+
Z φ(t)
x0+ǫ dz
w(z) = (t−t0). (3.69)
Se a integral em (3.68) diverge, ent˜ao (3.69) n˜ao define uma fun¸c˜ao. Se a integral em (3.68) converge, ent˜ao a equa¸c˜ao (3.69) define uma fun¸c˜ao; de fato, ent˜ao existe uma fam´ılia de solu¸c˜oes φc(t) de (3.38) definida por
(
φc(t) =x0, t≤c
Rφc(t)
x0
dz
w(z) = (t−c), x > c
(3.70)
para todoc≥t0. Aqui, entende-se que
Z φc(t)
x0
dz
w(z) = limǫ→0+
Z φc(t)
x0+ǫ dz
w(z), (3.71)
onde esta integral converge.
Exemplo 3.2.2.: Considere mais uma vez o problema de valor inicial
˙
x=x2/3
3.2 Crit´erios de Unicidade 33
Exemplo 3.2.3.: Considere o problema de valor inicial
˙ x=Lx
x(0) = 0 (3.73)
OndeL >0. Para este problema escolhemosw(z) = Lz, que ´e claramente cont´ınua e n˜ao decrescente no intervalo [0,∞). Al´em disso, uma vez que w(0) = 0, w(z)>0 para z > 0, e limǫ→0+Rα
ǫ dz w(z) =
1
Llimǫ→0+ln
1
ǫ = ∞. Esta fun¸c˜ao w(z) satisfaz as
condi¸c˜oes do Lema (3.2.11). Em seguida, para qualquer x1 e x2 temos
|f(t, x1)−f(t, x2)|=|Lx1 −Lx2|=w(|x1−x2|) (3.74)
e da´ı a condi¸c˜ao de Osgood (3.49) ´e tamb´em satisfeita. Portanto, do Teorema 3.2.12 o problema (3.73) tem uma ´unica solu¸c˜ao, a saber x(t)≡0.
Exemplo 3.2.4.: Considere o problema de valor inicial ˙x=f(t, x), x(0) = 0 onde
f(t, x) =
−xlnx, 0< x≤ 1
e
0, x= 0. (3.75)
Note que esta fun¸c˜ao n˜ao satisfaz a condi¸c˜ao de Lipschitz, logo o Teorema de unici-dade Lipschitz n˜ao ´e aplic´avel. Para este problema escolhemos
w(z) =
−zlnz, 0< z ≤ 1
e
0, z = 0 1
e, z >
1
e
.
Claramente, w(z) ´e cont´ınua e n˜ao decrescente em [0,∞) com w(0) = 0, w(z) > 0 para z >0. Al´em disso, temos
lim
ǫ→0+
Z 1
ǫ
dz
g(z) = limǫ→0+
Z 1
ǫ
dz
−zlnz = limǫ→0+
Z 1
ǫ
ln(ln(1
ǫ)) =∞.
Assim, esta fun¸c˜ao w(z) satisfaz as condi¸c˜oes do lema (3.2.11). Agora, vamos veri-ficar a condi¸c˜ao (3.54). Para isto notemos que
d2f dx2 =−
1
x <0, 0< x≤ 1 e,
e portantof ´e cˆoncava. Seja 0< x1−x2 < x2 < x1 ≤ 1e, ent˜ao segue-se que f(t, x1−x2)−f(t,0)
x1−x2 ≥
f(t, x1)−f(t, x2) x1 −x2
,
3.2 Crit´erios de Unicidade 34
−(x1−x2) ln(x1−x2)≥ −x1lnx1+x2lnx2 e portanto
|f(t, x1)−f(t, x2)|=|(−x1lnx1)−(−x2lnx2)| ≤ − |x1 −x2|ln|x1−x2|=w(|x1−x2|). Assim, para o problema (3.75) o Teorema de unicidade de Osgood ´e aplic´avel.
3.2.7 Integral divergente
Teorema 3.2.14. Seja a fun¸c˜ao f(x)cont´ınua no intervalo|x−x0| ≤b, ef(x0) = 0. Al´em disso, seja f(x)6= 0 para x0 < x≤x0+b e a integral
Z x0+b
x0
dz
f(z) (3.76)
´e divergente. Ent˜ao, n˜ao existe solu¸c˜ao para o problema de valor inicial (3.77)
˙
x=f(x) x(t0) =x0
(3.77)
a n˜ao ser a solu¸c˜ao constantex(t) = x0 [1].
Demonstra¸c˜ao: Assuma que existe uma solu¸c˜ao x(t) 6= x0 do problema de valor inicial (3.77). Ent˜ao, seja (considerar um de quatro casos ) `a direita de t0 um pontot1 comx0 < x(t1) =x1 < x0+b. Assim, pela equa¸c˜ao diferencial segue-se por separa¸c˜ao de vari´aveis que
Z x(t)
x1 dz
f(z) = (t−t1) (3.78)
pelo menos desde que x(t) satisfaz x0 < x(t) ≤ x0+b. Assume que ¯t ´e o primeiro ponto `a esquerda det1 com x(¯t) =x0. Ent˜ao, (3.78) leva a uma contradi¸c˜ao, porque quando t → ¯t a integral no lado esquerdo de (3.78) tende para o infinito enquanto
que o lado direito permanece limitado. .
3.2 Crit´erios de Unicidade 35
˙ x= 2x
x(0) = 0 (3.79)
tem uma ´unica solu¸c˜ao x(t)≡0, e a integral R0±αdz
z, (α > 0) deverge. Enquanto
que o problema
˙
x=x2/3
x(0) = 0 (3.80)
tem um n´umero infinito de solu¸c˜oes e a integral R0±αzdz2/3, (α > 0) converge.
3.2.8
f
autˆ
onoma, cont´ınua e positiva
Sef :R→R+ ´e cont´ınua e positiva ent˜ao a equa¸c˜ao ˙x=f(x) tem unicidade [17].
De fato a positividade de f ´e localmente equivalente `a condi¸c˜ao f(x0)>0.
Demonstra¸c˜ao: Fixe o ponto (a, b) ∈ R2, e suponha que x(a) = b e ˙x = f(x(t)) para todo t no intervalo J, a ∈ J. E seja F a antiderivada de 1f que tem F(b) =a. Pela regra da cadeia,
d
dtF(x(t)) = ˙F(x(t)) ˙x(t) = ˙ x(t)
f(x(t)) = 1. (3.81)
AssimF(x(t))−t´e constante emJ. Uma vez queF(b) = aex(a) =b, esta constante ´e 0. ComoF ´e estritamente crescente, concluimos que x(t) = F−1(x) em J.
3.2.9
Vari´
aveis separ´
aveis
Teorema 3.2.15. Seja a fun¸c˜aof(t, x) = u(t)v(x)cont´ınua no dom´ınioℜ, ev(x)6= 0. Ent˜ao, o problema de valor inicial (3.1) tem uma ´unica solu¸c˜aox(t) =V−1(U(t)), onde U(x) = Rtt
0u(τ)dτ e V(x) =
Rx x0
dt
v(t), desde que (t, U(t))∈ ℜ [1].
Demonstra¸c˜ao: Desde que v(x)6= 0, x˙
v(x) =u(t), e segue-se que
V(x) =
Z x
x0 dz v(z) =
Z t
t0
3.2 Crit´erios de Unicidade 36
Obviamente, a fun¸c˜ao V(x) ´e estritamente mon´otona, e a conclus˜ao segue pelo
Te-orema da fun¸c˜ao inversa .
3.2.10 Condi¸
c˜
ao de Majorana
[16] Estabelece uma condi¸c˜ao necess´aria para a n˜ao unicidade do problema de valor inicial (3.1) e conseq¨uentemente um novo crit´erio de unicidade que n˜ao requer nenhuma condi¸c˜ao especial na diferen¸ca f(t, x1)−f(t, x2).Pode-se tentar mostrar unicidade pela an´alise da equa¸c˜ao alg´ebrica 3.83
u−x0 + (p−t0)f(p, u) = 0 (3.83)
e que depende s´o dos dados do problema original, onde u ´e uma ic´ognita e p um parˆametro cuja fun¸c˜ao ser´a especificada em seguida.
Assumimos o operadorf :ℜ →R, onde
ℜ=I×R, I = [t0, t0+a], (3.84)
sendoa um n´umero positivo dado, e Rdenota a reta real.
Teorema 3.2.16. Seja a fun¸c˜ao f cont´ınua com respeito a t, e tal quef(t, x0) = 0 para todo t ∈ I. Assuma que o problema de valor inicial 3.1 admite duas solu¸c˜oes diferentes, definidas em [t0, t0+a]. Ent˜ao para todo ǫ > 0, existe p∈]t0, t0+a] tal que(3.83) tem pelo menos duas ra´ızes diferentes u com |u−x0|< ǫ .
Demonstra¸c˜ao:E ´obvio que (3´ .1) ´e satisfeito pelas constantesp=t0eu=x0; entretanto, assumimos que existe a solu¸c˜ao z(t) de (3.1) diferente da solu¸c˜ao cons-tantex0.
Seja ǫ >0 dado. Desde que u=x0 ´e uma solu¸c˜ao de (3.1) para todo p∈I, ´e suficiente para provar a existence de p∈[t0, t0+a], para o qual (3.1) ´e stisfeito por algumu6=x0, |u−x0|< ǫ.
Seja a fun¸c˜ao real A definida em [t0, t0 +d] colocando A(t0) = 0 e A(t) = (z(t)−x0)/(t−t0) para t 6= t0. Claramente a fun¸c˜ao A ´e cont´ınua em [t0, t0 +a], diferenci´avel em ]t0, t0+a[, e temos
˙
A(t) = 1
3.2 Crit´erios de Unicidade 37
para todot∈]t0, t0+a[.
Agora, fixe um ponto t2 ∈]t0, t0 +a[ com z(t2) 6= x0, tal que |z(t)−x0| < ǫ para todot∈[t0, t2], e denote
t1 =sup{x∈[t0, t2] :A(t) = 0}. (3.86) Notamos quez(t1) = x0 ez(t)6=x0 para todot ∈]t1, t2[.
Neste ponto existem duas possibilidades.
Se existe p ∈]t1, t2[ tal que ˙A(t) = 0, ent˜ao ´e claro a partir de (3.85) que, para um tal p, (3.1) ´e satisfeito por u =z(p). portanto, a prova ´e realizada apenas tomando estes pe u.
Caso contr´ario, se ˙A(t) 6= 0 para todo t ∈]t1, t2] (uma vez que ˙A(t) tem sinal constante em ]t1, t2] ), ent˜ao colocamos u=z(t2)(6=x0), e defina
g(t) = (t−t0)f(t, u)−u+x0 (3.87) para todot ∈[t0, t0+a]. Em seguida, notamos que se ˙A(t)>0 para todot∈]t1, t2[, ent˜ao A(t2)> A(t1) = 0, uma vez que u > x0 e conseq¨uentemente g(t0) = −u+x0. Por outro lado, temosg(t2) = (t2−t0)2A˙(t2)>0.
Cap´ıtulo 4
M´
etodos num´
ericos para resolu¸
c˜
ao de
EDO
“A classe de equa¸c˜oes diferenciais que s˜ao integr´aveis por quadratura ´e extre-mamente restrita; por esta raz˜ao, desde a ´epoca de Euler, m´etodos aproximados se tornaram muito importantes na teoria de equa¸c˜oes diferenciais” [8].
Neste cap´ıtulo discutimos o m´etodo de Euler para aproxima¸c˜ao do P V I
˙
x=f(t, x)
x(0) = 0 (4.1)
4.1 O m´
etodo de diferen¸
cas finitas
O m´etodo de diferen¸cas finitas se baseia em transformar o problema de encon-trar a solu¸c˜ao exata de uma equa¸c˜ao diferencial em um problema de resolver um sistema onde as derivadas de suas equa¸c˜oes s˜ao aproximadas por diferen¸cas entre va-lores da solu¸c˜ao discretizada, usando a s´erie de Taylor como ferramenta matem´atica principal.
4.2 O m´
etodo de Euler
co-4.2 O m´etodo de Euler 39
nhecemos.
Euler deduziu um processo iterativo que permitia determinar, de forma aproxi-mada, a solu¸c˜ao de um problema de valor inicial num determinado ponto. A demons-tra¸c˜ao rigorosa de que, de fato, o processo por ele apresentado conduzia `a solu¸c˜ao da equa¸c˜ao s´o foi apresentada mais tarde, em 1824, por Augustine Cauchy (1789-1857) e melhorada por Rudolf Lipschitz (1832-1908). No entanto, nem assim, o processo apresentado por Euler se tornou popular. A t´ıtulo de exemplo, Karl Weierstrass (1815-1897), famoso matem´atico alem˜ao do s´eculo XIX trabalhou nestes assuntos sem conhecer os trabalhos de Cauchy e Lipschitz [9].
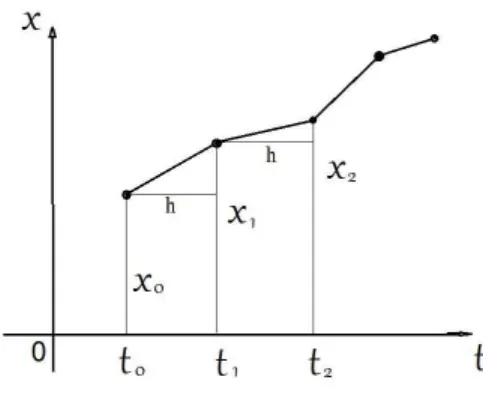
O m´etodo de integra¸c˜ao aproximada de Euler, consiste no fato de que a curva integral desejada da equa¸c˜ao diferencial ˙x = f(t, x) que passa atrav´es do ponto (t0, x0) ´e substitu´ıda por uma linha poligonal composta por segmentos de reta, ver figura (4.1), cada segmento dela ´e tangente a curva integral em um de seus pontos extremos. Onde aplicando este m´etodo de c´alculo aproximado dos valores da solu¸c˜ao desejadax(t) no ponto t=T, o segmento t0 ≤t ≤T (se T > t0) ´e subdividido em n partes iguais pelos pontos t0, t1, t2, ... , tn−1, tn, onde tn = T. O tamanho de
cada subdivis˜ao tn+1−tn=h ´e chamado de passo da malha. Denotamos por ¯xn os
valores aproximados da solu¸c˜ao desejada nos pontostn.
Figura 4.1 linha poligonal composta por segmentos de reta
Para calcular x1, no intervalo t0 ≤ t ≤ t1 substitua a curva integral desejada por um segmento tangente a ela no ponto (t0, x0). Uma vez que, x1 =x0+hx0˙ onde
˙
x0 =f(t0, x0) ver figura (4.1).
De forma similar, calculamos:
x2 =x1+hx1˙ onde x˙ =f(t1, x1); (4.2)
4.2 O m´etodo de Euler 40
...
xn=xn−1+hx˙n−1 onde x˙ =f(tn−1, xn−1); (4.4)
Se T < t0, o esquema de c´alculo permanece o mesmo, mas o intervalo de calcula¸c˜aoh ´e negativo.
´
E natural esperar que quando o intervalo de integra¸c˜ao decresse, i.e., h → 0, o m´etodo de Euler se torna cada vez mais preciso no c´alculo da solu¸c˜ao exata.
4.2.1 Erro local e erro global
Nesta se¸c˜ao consideramos a solu¸c˜ao exata x(t) com condi¸c˜ao inicial x(0) e solu¸c˜ao aproximada ¯xn(t) com condi¸c˜ao inicial aproximada ¯x0, e calculamos o erro
cumulativo en = ¯xn−x(tn) no passo iterativo n´umero n. Como veremos, este erro
cont´em duas contribui¸c˜oes: uma devido `a discretiza¸c˜ao, e a outra devido ao erro iniciale0 = ¯x0−x(0).
O erro cometido ao se usar o m´etodo de Euler no c´alculo dex1´e obtido a partir do resto da f´ormula de Taylor, ou seja, (t1−t0)2
2! x¨(ξ); t0 < ξ < t1. Como t1 −t0 =h, usa-se a seguinte nota¸c˜ao para o erro:e1 = h2
2!x¨(ξ). Numa etapande c´alculos tem-se analogamente
en=
h2
2!x¨(ξ), tn−1 < ξ < tn. (4.5) A express˜ao (4.5) ´e denominada erro local de truncamento [2]. A an´alise do erro ´e baseada na indu¸c˜ao: para todo n ∈ N estudamos o erro ao se passar da etapa n para a etapan+ 1.
Seja en = ¯xn−x(tn) o erro total cometido na etapa n, onde ¯xn ´e a solu¸c˜ao
aproximada ex(tn) a solu¸c˜ao exata. O acr´escimo no erro total ao se passar da etapa
n `a etapan+ 1 ´e
en = ¯xn−x(tn) (4.6)
en+1 = ¯xn+1−x(tn+1) (4.7) en+1−en= ¯xn+1−x¯n
| {z }
hf(tn,x¯n)
− x(tn+1) +x(tn)
| {z }
hf(tn,x(tn))+h2!2f˙(ξ,x(ξ)), tn<ξ<tn+1
(4.8)
segue-se que
en+1−en =h[f(tn,x¯n)−f(tn, x(tn))]−
h2