Uma Publiação daSoiedade BrasileiradeMatemátiaApliadaeComputaional.
Métodos de Regiões de Conança para Resolução
do Problema de Quadrados Mínimos:
Implementação e Testes Numérios
1
J.L.C. Gardenghi 2
, Departamento de Ciênia de Computação, IME - Instituto de
MatemátiaeEstatístia, USP-Universidade deSão Paulo,05508-090SãoPaulo,
SP,Brasil.
S.A. Santos 3
, Departamento de Matemátia Apliada, IMECC - Instituto de
Matemátia, Estatístia e Computação Cientía, UNICAMP - Universidade
EstadualdeCampinas,13083-859Campinas,SP, Brasil.
Resumo. Oproblemadequadradosmínimospossuiváriasapliaçõesnoampode
otimização. Nopresentetrabalho, abordamosduasestratégiasparasuaresolução:
Levenberg-MarquardteGradientesConjugados. Cadaumaexploraaraterístias
própriasdoproblema,eambasusamregiõesdeonançaparaaglobalização. Nossa
ontribuiçãoestá naimplementaçãode ambos os métodos noCAS Maxima e na
análiseomparativadodesempenhodessesmétodosnaresoluçãodeumafamíliade
problemasdequadradosmínimosdaliteratura.
Palavras-have. Quadradosmínimos,regiõesdeonança,implementação
om-putaional.
1. Introdução
Nestetrabalho,onsideramosoproblemadequadradosmínimos
min
x
∈
R
n
1
2
k
F
(
x
)
k
2
≡
f
(
x
)
,
(1.1)sendo
F
:
R
n
→
R
m
a função residual, ao menos duas vezes ontinuamentedi-fereniável,
F
(
x
)
o resíduo do problema emx
ek · k
a norma Eulidiana. No ampodeotimização,quadradosmínimostemváriasapliações,destaando-seseuusoparaajustarparâmetrosde modelosfrente aonjuntos dedadosoletadosem
experimentos, e neste ontexto
m
≫
n
. Para umreente panoramado estadodaartedesteproblema,tantodopontodevistateórioquantoprátio,veja[14℄esuas
referênias.
1
EstetrabalhoontouomosapoiosdoCNPq(304032/2010-7,106731/2011-4e
151749/2011-6),FAPESP(2012/05725-0)ePRONEX-Otimização;TrabalhoapresentadonoXXXIVCNMAC.
2
johnime.usp.br
3
Na próxima seção, apresentamos dois métodos para resolução de (1.1): o
al-goritmo de Levenberg-Marquardt (LMA) e o método de Gradientes Conjugados
(MGC).Emseguida,destaamososdetalhesdaimplementaçãoeosresultadosdos
experimentos numériosque avalidam eilustram odesempenhoomparativodas
duasabordagensdistintas. Finalizamosotextoomumabreveonlusão.
2. Métodos de Regiões de Conança para
Quadra-dos Mínimos
Métodosderegiõesdeonançaparaminimizaçãoirrestrita,
min
f
(
x
)
s.a.x
∈
R
n
,
sãoestratégiasiterativasbaseadasemmodelosquadrátiosparaafunçãoobjetivo
f
emtornodeumdadoponto[2℄. Emgeral,seja
xc
∈
R
n
oponto orrente,dene-se
ummodeloquadrátio
qc
paraf
emtornodexc
eosubproblemaéformuladoomomin
p
∈
R
n
qc
(
p
)
s.a.
k
p
k ≤
∆
c,
(2.1)em que
0
<
∆
c
∈
R
é o raio da região de onança. A soluçãopc
, exata ou aproximada,desteproblemaéusadaparaobterumpontoandidatoxn
=
xc
+
pc
. Obomdesempenhoderegiõesdeonançaestáligadoaoontroledotamanhodo raio, que determina a região em que o modelo é onável para se aproximar
a funçãoobjetivo. Nesta abordagem, vamos determinaro tamanho deste raio de
aordoom oderésimo quea soluçãode (2.1)ausou no problemaoriginal que
aproxima. Para isto, vamos avaliar a razão entre o derésimo no modelo e na
funçãoobjetivo,hamadoquoientedereduçãorelativa,dadopor
ρ
(
p
)
def=
f
(
xc
)
−
f
(
xc
+
p
)
qc
(0)
−
qc
(
p
)
.
(2.2)NoAlgoritmo1,página71,apresentamosoalgoritmobásioderegiõesde
on-ança. Osparâmetros
κ, η
1
eη
2
sãodeterminadosexperimentalmente,emborahajaalgumasesolhaslássiasnaliteratura[2,11℄. Sobestaótia,esolhemos
κ
= 10
−
3
,
η
1
=
1
4
eη
2
=
3
4
. Para resolvero subproblema(linha 2), implementamosLMA eMGC.Uma brevedesriçãodestes doismétodoséapresentadaaseguir.
2.1. Método de Levenberg-Marquardt
A prinipal araterístia deste método é ataar a estrutura partiular do
pro-blema (1.1). Originalmente,esta estratégiafoipropostaporLevenberg[6℄ e
Mar-quardt [8℄, e foi onsiderada preursora da ténia de regiões de onança (ver
também [7℄). Moré [9℄ props uma série departiularidades paraimplementação,
queforamexploradasnestetrabalho.
Dadoumponto
xc
∈
R
n
,LMAtrabalhaomaaproximação
qc
(
p
)
def=
1
2
k
Jcp
+
Fc
k
2
emtornode
xc
,sendoFc
∈
R
m
oresíduoem
xc
eJc
∈
R
m
×
n
ajaobianadafunção
Algoritmo1:RegiõesdeConança
Entrada: Pontoiniial
x
0
∈
R
n
, raioiniialdaregiãodeonança
∆
0
, onstantesκ
∈
[0
,
1
4
]
,0
< η
1
≤
η
2
<
1
.1 para
k
= 0
,
1
, . . .
haer2 Enontre
pk
omosolução(aproximada)dosubproblema(2.1)3
xk
+1
←
xk
+
pk
4 Avalieoquoiente dereduçãorelativa
ρ
(
pk
)
(2.2) 5 seρ
(
pk
)
> κ
então6 Aeiteopontoandidato
xk
+1
eavalieritériosdeparadasenão
7 Desarteopontoandidatoeonsidere
xk
+1
=
xk
m8 se
ρ
(
pk
)
≤
η
1
entãoObtenha∆
k
+1
reduzindo∆
k
9 senão
10 se
ρ
(
pk
)
≥
η
2
entãoObtenha∆
k
+1
aumentando∆
k
11 senão
∆
k
+1
←
∆
k
mn
umproblemadequadradosmínimoslinearesompassorestrito,ujasondiçõesde
otimalidadesãodadaspor
(
J
T
c
Jc
+
λ
∗
I
)
p
∗
=
−
J
T
c
Fc
(2.3a)λ
∗
(
k
p
∗
k −
∆
c
) = 0
(2.3b)λ
∗
≥
0
,
k
p
∗
k ≤
∆
c.
(2.3)
Osistema linear(2.3a) estábemdenido somentese
(
J
T
c
Jc
+
λ
∗
I
)
fordenida positiva. ComoJ
T
c
Jc
é ao menos semidenida positiva, então(
J
T
c
Jc
+
λ
∗
I
)
será denida positiva sempre queλ
∗
>
0
. Em partiular, podemos ter diuldades
numérias,pormal ondiionamentoou porsingularidade, quando
λ
∗
= 0
. Neste
aso,deaordoom(2.3b),temos queasoluçãode(2.1)podeserinterna,ouseja,
k
p
∗
k
<
∆
c
. Oresultado aseguirestabelee ondiçõespara queasoluçãode(2.1)sejainterioràregiãodeonança.
Proposição 2.1. O problema (2.1) não possui solução global na fronteira se, e
somente se,
J
T
c
Jc
é denida positiva e o passo de Newton é interior, ou seja,k
(
J
T
c
Jc
)
−
1
J
c
T
Fc
k
<
∆
c
.Demonstração. Ver[4,Corolário1℄.
Poroutrolado,asooproblemapossuasoluçãonafronteira,ésemprepossível
enontrar
λ
∗
quesatisfaça
k
p
∗
k
= ∆
c
. Assimsendo,onsideramosp
(
λ
)
def=
−
(
J
T
emque
†
éapseudoinversadeMoore-Penrose,equeremosenontrarλ
∗
≥
0
talque
k
p
(
λ
∗
)
k
= ∆
c.
(2.4)
Aequação(2.4)éhamadadeequaçãoseular. Poronseguinte,nossoproblema
sereduzaenontrarumzerodeumaequaçãoemumavariável. Paratal,usaremos
oMétododeNewton,omalgumassalvaguardasqueserãoapresentadasnaSeção3.
Notemos que
λ
∗
atuaomo um regularizador,ou seja,ele ajusta osistema (2.3a)
paraquesempreexistaumasolução
p
∗
. Éjustamente essaaonexãodeLMAom
regiõesdeonança. Originalmente[6,8℄,oparâmetro
λ
∗
eraomputadodeforma
heurístia. Com regiões de onança, busamos o multipliador de Lagrange da
restriçãoquadrátia
λ
∗
≥
0
de talmaneiraque
k
p
∗
k
= ∆
c
, salvooasopartiularemqueasoluçãosejainternaeentão
λ
∗
= 0
.
2.2. Método de Gradientes Conjugados
Nestemétodo,vamosataaroproblema(1.1)omoumproblemageralde
minimiza-çãoirrestrita,eresolvê-lousandoaestratégiaderegiãodeonança,onsiderando,
aadaiteração,osubproblema deregião deonança(2.1),tomando
qc
(
p
)
def=
1
2
p
T
Hcp
+
g
T
c
p
+
fc
o modelo quadrátiode
f
em torno de um ponto orrentexc
, omHc
∈
R
n
×
n
,
gc
∈
R
n
e
fc
∈
R
,respetivamente,amatrizhessiana, ovetorgradienteeafunção objetivof
,todosavaliadosemxc
.Para um estudo mais detalhado sobre a estratégia de gradientes onjugados,
veja[5,Seção3℄. Paraaresoluçãodosubproblema,aideiaéproduzirumasequênia
{
di
}
de direções onjugadas e enontrar a solução para (2.1) iterativamente, pormeiode
pi
+1
=
pi
+
αidi
. MGCseriaumaestratégianaturalseHc
fosseumamatriz denida positiva, mas, na prátia, nada sabemos sobre ela. É justamente nesteponto queasregiõesdeonançatornam-seesseniais. Asondiçõesneessáriase
suientesdeotimalidadede(2.1)sãodadaspor
(
Hc
+
λ
∗
I
)
p
∗
=
−
gc,
(2.5a)
λ
∗
(
k
p
∗
k −
∆
c
) = 0
,
(2.5b)λ
∗
≥
0
,
k
p
∗
k ≤
∆
c,
(2.5)
(
Hc
+
λ
∗
I
)
ésemidenidapositiva
.
(2.5d)Toint[13℄eSteihaug[12℄propuseramalgumasmodiaçõesnoMGCoriginaldetal
maneiraquese
k
gc
+
Hc
pi
k
formenorquedadatolerânia,entãotemosumasolução interna,poispi
satisfazaproximadamenteaondição(2.5a)omλ
∗
= 0
. Poroutro
lado,se
k
pi
+1
k
>
∆
c
,entãobastaenontrarτ
deformaquek
pi
+
τ dik
= ∆
c
. Por m,seHc
nãoédenida positiva,entãoexisteuma direçãode urvaturanegativaou nula apartir de
pi
. Assim sendo, se enontrarmos uma tal direçãodi
, bastadenirumpassoqueatinjaabordadaregiãodeonança. Emoutraspalavras,se
d
T
Destemodo,MGCatuaomoGClássioquando
Hc
édenidapositiva. Casoontrário, se forenontradauma direção de urvatura negativa,determina-se um
passo queatinjaaborda daregião deonança. De qualquerforma, opassotem
seu tamanho restrito e essa também é uma ondição de parada do método. No
Algoritmo2desrevemosMGC.
Algoritmo2:GradientesConjugadosomRegiõesdeConança
Entrada: Pontoorrente
xc
∈
R
n
,amatriz hessiana
Hc
∈
R
n
×
n
eo
gradiente
gc
∈
R
n
dafunçãoobjetivoavaliadosem
xc
,∆
c
oraio daregiãodeonança,ε >
0
uma tolerâniaparaoerrode otimalidade.Saída:
p
direçãoparaomputaronovopontoandidatoxn
=
xc
+
p
.1
p
0
←
0
, r
0
←
gc, d
0
←
r
0
2 parai
= 0
,
1
, . . .
haer 3 sed
T
i
Hcdi
≤
0
então4 Enontre
τ
tal quek
pi
+
τ di
k
= ∆
c
5 retornapi
+
τ di
m
6
αi
←
(
r
T
i
ri
)
/
(
d
T
i
Hcdi
)
7
pi
+1
←
pi
+
αidi
8 sek
pi
+1
k
>
∆
c
então9 Enontre
τ
tal quek
pi
+
τ dik
= ∆
c
10 retornapi
+
τ di
m
11
ri
+1
←
ri
+
αiHc
di
12 se
k
ri
+1
k ≤
ε
entãoretornapi
+1
13
βi
←
(
r
T
i
+1
ri
+1
)
/
(
r
i
T
ri
)
14
di
+1
←
ri
+1
+
βidi
n3. Implementação Computaional
Nestaseção,apresentamososdetalhesdeimplementaçãodoLMAque,porexplorar
aspeuliaridadesdoproblema(1.1),possuimaispartiularidadesdeimplementação
queoAlgoritmo2,queéummétodopara resoluçãodosubproblema deregiõesde
onançanoasodeminimizaçãoirrestritageral.
3.1. Álgebramatriialempregadanasoluçãodosubproblema
A equação (2.3a) pode ser vista omo um sistema de equações normais para o
problemalineardequadradosmínimos:
Jc
√
λI
p
∼
=
−
Fc
0
Talequivalêniapermiteresolveroproblemasemavaliaroproduto
J
T
c
Jc
,reduzindopelametadeaquantidadedeoperações. Destemodo,sealularmosafatoração
QR
Jc
=
Q
Rc
0
teremosQ
T
0
0
I
Jc
√
λI
=
Rc
0
√
λI
.
(3.2)Amatrizqueresultade(3.2)possuiumaestruturapartiular:
Rc
éumamatriztriangular superior, enquanto
√
λI
é uma matriz esalar. Diante disto, épossí-vel obter uma matriz triangular superior equivalente eliminando-se os
n
termosnão-nulos da matriz
√
λI
om uma sequênia den
(
n
+ 1)
/
2
rotações de Givensapliadasemadalinha
i
de√
λI
, simultaneamenteaadalinhai
+
j
deRc
,paraj
= 0
, . . . ,
(
n
−
i
)
, omeçandoda linhan
. Expressando tais rotaçõesem umamatriz
Gλ
∈
R
(
m
+
n
)
×
(
m
+
n
)
pormeiode todosossuessivos
n
(
n
+ 1)
/
2
produtos, vemqueG
T
λ
Rc
0
√
λI
=
Rλ
0
0
.
(3.3)Disto,obtemosamatriztriangularsuperior
Rλ
,demodoqueR
T
λ
Rλ
=
J
T
c
Jc
+
λ I
.Poronseguinte,osistema (2.3a) torna-semenosustosodeserresolvidopara
di-ferentesvaloresde
λ
. Defato,afatoraçãoQR
deJc
éaluladaumaúniavez,noiníioda iteraçãointerna,enquanto, paraadavalor de
λ
, obtém-seRλ
por(3.3),queonsisteemumproedimento maisbaratoqueoálulodafatoração
QR
pro-priamentedita.
3.2. Raiz da equação seular
O problema(2.4) onsisteem enontrar
λ
∗
≥
0
tal que
k
p
(
λ
∗
)
k
= ∆
c
. Então, sedenimos
δ
(
λ
)
def=
p
(
λ
)
−
∆
c
,estamosinteressadosemenontrarumaraizparaδ
(
λ
)
.Todavia,umaanálise maisapurada [4, Seção3.2℄ nosmostraqueafunção
δ
podepossuirpolosnosautovaloresdamatriz
J
T
c
Jc
+
λI
epodenãopossuirzerosnitos. Emvistadisto,umaestratégiamaisestáveléresolveraequaçãoseularφ
(
λ
)
def=
1
k
p
(
λ
)
k
−
1
∆
c
= 0
,
(3.4)que, por serareíproa de
δ
, não possui polos nitosesuasraízesaonteemnosvaloresnegativosdosautovaloresdamatriz
J
T
c
Jc
+
λI
. Destemodo,paraenontrarλ
∗
≥
0
que satisfaça(2.3a), avaliamos primeiro o asopartiular em que
λ
∗
= 0
(solução interna). Se (2.3a) não possui solução neste aso, busamos uma raiz
positivaparaaequaçãoseularusandoométododeNewton.
OmétododeNewton apliado aoproblema(3.4) gerauma sequênia
{
λj
}
talque
λj
+1
=
λj
−
φ
(
λj
)
Emontrapartida,seriainteressantereduziroustodoálulode
λj
+1
eaindaobteruma expressãonumeriamentemaisestável. Issoépossível,onformeestabeleeo
resultadoaseguir.
Teorema 3.1. Considere o problema (3.4) de enontrar a raiz da equação
seu-lar. Seja
Rλ
amatriz triangular alulada em (3.3), tal queR
T
λ
Rλpj
=
−
J
T
c
Fc
eR
T
λ
qj
=
pj
e seja∆
c
o raio da região de onança orrente. A sequênia{
λj
}
gerada pelo método de Newtondenidaem (3.5)éequivalentea:λj
+1
=
λj
+
k
pj
k
k
qj
k
2
k
pj
k −
∆
c
∆
c
.
(3.6)Demonstração. Ver[4,Lema1℄.
Porm, paraque ométodo deNewton não onvirjapara uma raizindesejada
de
φ
(
λ
)
(poisestamos interessadosem raízes positivas), usamosuma salvaguarda demodoque,aadaiteração,impomosλj
∈
[
ℓj, uj
]
,sendoℓ
0
= 0
aestimativapara omenorautovalordeJ
T
c
Jc
+
λI
eu
0
obtidopeloquoientedeRayleigh(
µ
1
+
λ
)
2
≤
p
T
(
J
T
c
Jc
+
λI
)
T
(
J
c
T
Jc
+
λI
)
p
p
T
p
≤
(
µn
+
λ
)
2
,
sendo
µ
1
, µn
omenoreomaiorautovaloresdeJ
T
c
Jc
,respetivamente. Como zeroéumlimitanteinferiorpara
µ
1
,eestamosprourandok
p
k
= ∆
c
,vemqueλ
≤
k
J
T
c
Fc
k
∆
c
=
u
0
.
Ointervalodasalvaguardaéatualizadoaadaiteraçãodaseguintemaneira:
se
δ
(
λj
)
≥
0
,entãoℓj
+1
=
λj
+
k
qj
k
2
k
pj
k
,
asoontráriouj
+1
=
λj
.
Paramaioresdetalhes,ver[4, Seção4.2.1℄.
3.3. Quoiente de redução relativa
Nestasubseção,nossoobjetivoéeliminaraoorrêniadeunderowseoverowsno
álulode(2.2). UsandoLMA,podemosalularoquoiente omo
ρ
(
p
) =
k
Fc
k
2
− k
Fn
k
2
k
Fck
2
− k
Fc
+
Jcp
k
2
,
(3.7)emque
Fn
=
F
(
xc
+
p
)
. De(2.3a), temosqueJ
T
c
Jcp
=
−
J
T
c
Fc
−
λp
(3.8a)−
F
T
c
Jc
=
λp
T
+
p
T
J
c
T
Jc.
(3.8b)Algumasmanipulaçõesom(3.8)em(3.7)impliamque
Portanto,podemosreesreveroquoiente(3.7)dividindotodosostermospor
k
Fc
k
2
eobtendoaseguinterelação:
ρ
(
p
) =
1
−
k
Fn
k
k
Fc
k
2
k
Jc
p
k
k
Fc
k
2
+ 2
λ
k
p
k
k
Fc
k
2
.
(3.9)
Destemodo, odenominadorde (3.9)serásempre não-negativoe não irágerar
overows. Por outrolado,onumeradorde(3.9)jamaisgeraráoverows anão ser
que
k
Fn
k ≫ k
Fc
k
. Nesteaso,temosqueomodelonãofoi reduzidoomrelaçãoàfunçãoobjetivo,portantonãoéneessárioalular
ρ
(
p
)
.3.4. Atualização do raio da região de onança
Utilizamos a aproximação iniial
∆
0
=
k
J
T
0
F
0
k
/
10
, lássia da literatura [2℄. Oontroledoraiodaregiãoonsisteemtrêsinstânias: manter,aumentaroureduzir.
OsasosemqueadaumaéadotadasãoexpostosnoAlgoritmo1. Paraaumentar
otamanho doraio,fazemos
∆
n
= 2
k
p
∗
k
. Parareduzirotamanhodoraio,fazemos
∆
n
=
ϑ
∗
∆
c
. A m de denir um valor paraϑ
∗
, seguimos Moré [9℄: denimos
γ
(
ϑ
)
def= 1
/
2
k
F
(
xc
+
ϑp
∗
)
k
2
e enontramosominimizador
ϑ
∗
daparábola
interpo-lante
mq
(
ϑ
)
def= [
γ
(1)
−
γ
(0)
−
γ
′
(0)]
ϑ
2
+
γ
′
(0)
ϑ
+
γ
(0)
.
Como
mq
ésuaveeonvexa,entãotemos quem
′
q
(
ϑ
∗
) = 0
,ouseja,ϑ
∗
=
−
γ
′
(0)
2[
γ
(1)
−
γ
(0)
−
γ
′
(0)]
=
−
(
p
∗
)
T
J
T
c
Fc
k
Fn
k
2
− k
Fc
k
2
−
2(
p
∗
)
T
J
T
c
Fc
.
(3.10)Pré-multipliando(2.3a)avaliadoem
p
∗
por
(
p
∗
)
T
,temos
−
(
p
∗
)
T
(
J
T
c
Jc
+
λ
∗
I
)
p
∗
= (
p
∗
)
T
J
T
c
Fc,
dondesegueque
(
p
∗
)
T
J
T
c
Fc
k
Fc
k
2
=
−
"
k
Jcp
∗
k
k
Fc
k
2
+
λ
∗
k
p
∗
k
k
Fc
k
2
#
.
(3.11)Dividindo todos os termos de (3.10) por
k
Fc
k
2
, multipliando o numerador e o
denominadorpor
−
1
/
2
esubstituindo(3.11),quedenotamosporα
,obtemosϑ
∗
=
1
2
α
α
+
1
2
"
1
−
k
Fn
k
k
Fc
k
2
#
.
(3.12)
Pelosmesmosmotivosexpostosnaseção anterior, (3.11)éumaexpressão
numeri-amente estável,e(3.12)éonávelebarataparaenontrar
ϑ
∗
4. Experimentos Numérios
Ambos osmétodos foram implementados no CAS Maxima [1, 15℄. O Maxima é
umsistemaalgébrioomputaionallivredeódigoaberto. Possuiumalinguagem
própria,interpretada,alémdeexeutarprogramasesritosemLisp. Esolhemos o
Maxima por serum sistema gratuito elivre, além de não possuir ferramentas de
otimização implementadas, omo é oaso doMatlab R
. Ostestes foram rodados
numomputadorIntelDual-CoreT34002.16GHzesistemaoperaionalWindows7
Professional64bits. Osproblemas-testeforamextraídosde[10℄eestãonumerados
de aordo om a referênia original, bem omo as dimensões e os pontos iniiais
adotados(verdetalhesem[4,5℄).
Comoritériosdeparada, adotamosasatisfaçãorelativadasondiçõesde
pri-meiraordem,istoé,
xk
ésoluçãoemLMAsex
T
k
J
k
T
Fk
/
max
{k
Fk
k
,
1
}
≤
10
−
6
eemMGC se
k
gk
k
/
k
g
0
k ≤
10
−
6
. Além disso,em LMAimpusemosparada seoresíduo
fossepequeno,ou seja,
k
Fk
k ≤
10
−
6
. Porm, usamosritériosque impliam
pa-radaseavariaçãoentreositerandosfossedaordemde
10
−
12
eseaquantidadede
iteraçõesultrapassasse200paraLMAe300paraMGC,todavianostestesefetuados
nenhumproblemaparouportaisritérios.
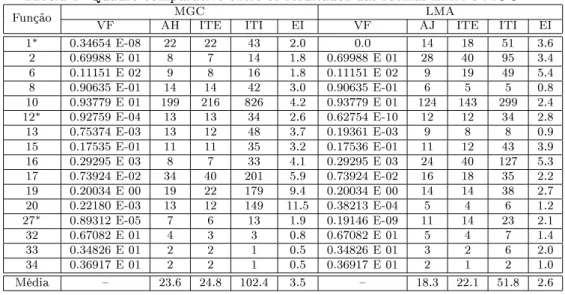
Osresultados dos experimentos são expostos na Tabela 1, enquanto os pers
dedesempenho[3℄naFigura1. Neles,onsideramosVFafunçãoobjetivoavaliada
nasolução,AHaquantidadede avaliaçõesdamatriz hessiana(para oMGC), AJa
quantidadedeavaliaçõesdamatrizJaobiana(paraoLMA),ITEaquantidadede
iteraçõesexternas, ITI a quantidade de iteraçõesinternas (isto é, para resolução
dos subproblemas de regiões de onança) e EI o esforço interno por problema,
dadopelarazãoentreaquantidadedeiteraçõesinternaseavaliaçõesmatriiais. A
quantidadede avaliaçõesdafunçãoobjetivoéigualàquantidadedeITEaresida
de um. Osproblemasmaradosom
∗
são aquelesquepararam pelo tamanhodoresíduoemLMA;osdemaispararamporsatisfazerondiçõesdeprimeiraordem.
Asavaliaçõesmatriiaisrepresentamquantosdospontosgeradosforamaeitos.
Destemodo,onúmerodepontosrejeitados,paraadaproblema,édadopela
dife-rença entre aquantidadede avaliaçõesde funções ematriiais. Neste ontexto, o
esforçointernoporproblemarepresentaquantasiteraçõesinternasforam
despendi-das,emmédia,paraadapontoaeito.
Aeradosresultadosapresentados,notamosqueLMAémaiseienteem
ava-liaçõesdefunção,avaliaçõesmatriiaisequantidadedeiteraçõesinternas,enquanto
MGC,apenas emquantidadedeiteraçõesinternasdespendidas. Dopontodevista
derobustez,LMAsesobressainaquantidadedeiteraçõesinternas,enquantoMGC
emtermosdeavaliações,tantodefunçãoquantomatriiais,edeiteraçõesexternas.
Istosedeveaofato deque LMA,poraproveitarmelhor aestruturadoproblema,
trabalhamaisinternamente,onsumindomenositeraçõesinternasporémmais
ava-liações que MGC. Considerando-se, problema aproblema, onúmero de iterações
internas despendido para gerar a sequênia de pontos aeitos, o esforço interno
de LMA éinferior ao de MGC. Com relação ao número de pontos rejeitados, no
1
2
3
4
5
6
0
0.2
0.4
0.6
0.8
1
t
ρ
s
(t)
LMA
MGC
(a)AvaliaçõesdeFunção.
2
4
0
0.2
0.4
0.6
0.8
1
t
ρ
s
(t)
LMA
MGC
(b)AvaliaçõesMatriiais.
2
4
6
0
0.2
0.4
0.6
0.8
1
t
ρ
s
(t)
LMA
MGC
()IteraçõesExternas.
2
4
6
8
10
12
14
16
18
20
22
24
26
0
0.2
0.4
0.6
0.8
1
t
ρ
s
(t)
LMA
MGC
(d)IteraçõesInternas.
Figura1: PersdedesempenhodosalgoritmosLMA eMGC.
Tabela1: QuadroomparativoentreosresultadosdasrotinasLMAeMGC.
MGC LMA
Função
VF AH ITE ITI EI VF AJ ITE ITI EI
1
∗
0
.
34654
E-08 22 22 43 2.00
.
0
14 18 51 3.62
0
.
69988
E01 8 7 14 1.80
.
69988
E01 28 40 95 3.46
0
.
11151
E02 9 8 16 1.80
.
11151
E02 9 19 49 5.48
0
.
90635
E-01 14 14 42 3.00
.
90635
E-01 6 5 5 0.810
0
.
93779
E01 199 216 826 4.20
.
93779
E01 124 143 299 2.412
∗
0
.
92759
E-04 13 13 34 2.60
.
62754
E-10 12 12 34 2.813
0
.
75374
E-03 13 12 48 3.70
.
19361
E-03 9 8 8 0.915
0
.
17535
E-01 11 11 35 3.20
.
17536
E-01 11 12 43 3.916
0
.
29295
E03 8 7 33 4.10
.
29295
E03 24 40 127 5.317
0
.
73924
E-02 34 40 201 5.90
.
73924
E-02 16 18 35 2.219
0
.
20034
E00 19 22 179 9.40
.
20034
E00 14 14 38 2.720
0
.
22180
E-03 13 12 149 11.50
.
38213
E-04 5 4 6 1.227
∗
0
.
89312
E-05 7 6 13 1.90
.
19146
E-09 11 14 23 2.132
0
.
67082
E01 4 3 3 0.80
.
67082
E01 5 4 7 1.433
0
.
34826
E01 2 2 1 0.50
.
34826
E01 3 2 6 2.034
0
.
36917
E01 2 2 1 0.50
.
36917
E01 2 1 2 1.05. Conlusão
OalgoritmoLMA éuma propostaatraente para aresoluçãode (1.1), porserum
métodomaisbarato,seomparadoaométododeNewton. EmLMA,asinformações
desegundaordemdafunçãoresidualsãosubstituídaspelotermoregularizador
λI
.Emontrapartida,ométodo perde desempenho em problemasextremamente não
linearesouseoresíduoformuitograndenasolução
x
∗
.
EmomparaçãoomMGC, LMAaproveitaaestruturadoproblema(2.3a) eé
maiseienteem algunsquesitos. Todavia,exigemuitasfatoraçõesdematrizes,e
trabalhamaisinternamente,oquepodeserruimem algunsasos. Emvistadisso,
MGCéummétodoompetitivo,mostrando-semaisrobustoqueLMAempartedos
quesitosanalisados. Gradientesonjugadosébemonheidoporserumaboa
estra-tégiapararesoluçãode sistemaslineares ommatrizesdenidaspositivas,todavia
aliado àestratégia de regiõesde onança pode ser uma alternativa interessante
tambémparaproblemasnãoonvexos.
Abstrat. Theleastsquares problem hasmanyappliations intheeld of
opti-mization. Inthepresentwork,weusetwostrategiesforitsresolution:
Levenberg-Marquardt and Conjugate Gradients. Eahone exploits some problem features,
and bothareglobalizedbythe trust-regionstrategy. Ourontributiononsistsin
theimplementationofbothmethodsusingtheCASMaximaandinthe
ompara-tiveanalysisofthesemethodsintheresolutionofafamilyofleastsquaresproblems
fromtheliterature.
Keywords. Leastsquares,trustregion,omputationalimplementation.
Referênias
[1℄ L.N.Andrade,Maxima: umompletoprogramadeomputaçãoalgébria,
Re-vistado Professorde Matemátia,n. 77,2012.
[2℄ A.R. Conn,N.I.L. Gould, Ph.L.Toint, Trust-region Methods. SIAM,
Phila-delphia,2000.
[3℄ E.D.Dolan,J.J.Moré,Benhmarkingoptimizationsoftwarewithperformane
proles,Mathematial Programming,v.91,pp.201-213,2002.
[4℄ J.L.C.Gardenghi,S.A.Santos,Sistemasnão-linearesviaregiãodeonança:
oalgoritmo de Levenberg-Marquardt.Relatório de Pesquisa, 2011.
Disponí-vel em http://www.ime.uniamp.br/sites/default/les/rel_pesq/rp03-11.pdf.
Aessoem05mar.2013.
[5℄ J.L.C.Gardenghi,S.A.Santos,Minimizaçãoirrestritausandogradientes
on-jugados e regiões de onança. Relatório de Pesquisa, 2012. Disponível em
http://www.ime.uniamp.br/sites/default/les/rel_pesq/rp04-12.pdf. Aesso
em05mar.2013.
[6℄ K.Levenberg,Amethodforthesolutionofertainnon-linearproblemsinleast
[7℄ K.Madsen,An algorithmfortheminimaxsolutionofoverdeterminedsystems
ofnonlinearequations.Journalof the Instituteof Mathematisand its
Appli-ations.v.16(3),pp.321-328,1975.
[8℄ D.W.Marquardt,Analgorithmforleast-squaresestimationofnonlinear
para-meters,SIAMJournalon AppliedMathematis 11,pp.431-441,1963.
[9℄ J.J.Moré, TheLevenberg-Marquardtalgorithm: implementationand theory.
LetureNotesinMathematis630: NumerialAnalysis,Springer-Verlag,New
York,pp.105-116,1978.
[10℄ J.J.Moré, B.S. Garbow,K.E. Hillstrom, Testing unonstrainedoptimization
software,ACM Transations onMathematial Software,v.7,pp.17-41,1981.
[11℄ J.Noedal, S.J.Wright,NumerialOptimization.Springer,NewYork,1999.
[12℄ T.Steihaug,Theonjugategradientmethodandtrustregioninlargesale
op-timization.SIAMJournalonNumerialAnalysis,v.20(3),pp.626-637,1983.
[13℄ Ph.L.Toint,TowardsaneientsparsityexploitingNewtonmethod for
mini-mization,em SparseMatrix andTheir Uses (I. Du, ed.), Aademi Press,
pp.57-88,1981.
[14℄ Y. Yuan, Reentadvanes in numerialmethods for nonlinearequations and
nonlinear least-squares. Numerial Algebra, Control and Optimization, v. 1,
n.1,pp.15-34,2011.