ESTABILIZAC¸ ˜AO DE ´ORBITAS PERI ´ODICAS INST ´AVEIS UTILIZANDO CONTROLE POR MODOS DESLIZANTES COM COMPENSAC¸ ˜AO
ADAPTATIVA
Geraldo Francisco de Souza Rebou¸cas
Disserta¸c˜ao de Mestrado apresentada ao Programa de P´os-gradua¸c˜ao em Engenharia Mecˆanica, da Universidade Federal do Rio Grande do Norte, como parte dos requisitos necess´arios `a obten¸c˜ao do t´ıtulo de Mestre em Engenharia Mecˆanica.
Orientador: Wallace Moreira Bessa
Rebou¸cas, Geraldo Francisco de Souza
Estabiliza¸c˜ao de ´orbitas peri´odicas inst´aveis utilizando controle por modos deslizantes com compensa¸c˜ao adaptativa/Geraldo Francisco de Souza Rebou¸cas. – Natal: UFRN/PPGEM, 2014.
XV, 79 p.: il.; 29,7cm.
Orientador: Wallace Moreira Bessa
Disserta¸c˜ao (mestrado) – UFRN/PPGEM/Programa de Engenharia Mecˆanica, 2014.
Referˆencias Bibliogr´aficas: p. 74 – 78.
`
Agradecimentos
Aos meus amigos e colegas do curso de Engenharia Mecˆanica da UFRN e tamb´em aos meus professores, tanto da gradua¸c˜ao como da p´os-gradua¸c˜ao, com seus desafios que me instigaram a estudar cada vez mais.
Aos meus amigos da Rep´ublica do Jambeiro, tanto os antigos como os novos moradores. Os Engs. Kletson Vieira, Thallys Belo, Francisco Jonas, Marcel Abreu e Samuelson Nascimento, bem como a Amauri Morais. Obrigado pelas brincadeiras, gargalhadas e pelo apoio durante minha jornada na UFRN.
Ao M.Sc. Jo˜ao Deodato, com seu apoio alvoro¸cado mas sempre bem-humorado em v´arios momentos que vivi dentro desta institui¸c˜ao, estando sempre aberto a conversar e sugerir caminhos para o prosseguimento das pesquisas que culminaram na elabora¸c˜ao deste trabalho.
Ao mestrando Andr´e Lopes e aos doutorandos Marcelo Tanaka e Josiane Fer-nandes, sempre dispostos a trocar ideias, tirar d´uvidas e ajudar.
Ao meu orientador Prof. DSc. Wallace Moreira Bessa, que me propˆos um tema t˜ao interessante, por seus conselhos e conversas elucidativas sobre os mais variados assuntos, acadˆemicos ou n˜ao.
Resumo da Disserta¸c˜ao apresentada `a UFRN como parte dos requisitos necess´arios para a obten¸c˜ao do grau de Mestre em Ciˆencias (M.Sc.)
ESTABILIZAC¸ ˜AO DE ´ORBITAS PERI ´ODICAS INST ´AVEIS UTILIZANDO CONTROLE POR MODOS DESLIZANTES COM COMPENSAC¸ ˜AO
ADAPTATIVA
Geraldo Francisco de Souza Rebou¸cas
Janeiro/2014
Orientador: Wallace Moreira Bessa Programa: Engenharia Mecˆanica
Abstract of Dissertation presented to UFRN as a partial fulfillment of the requirements for the degree of Master of Science (M.Sc.)
STABILIZATION OF UNSTABLE PERIODIC ORBITS USING SLIDING MODE CONTROL WITH ADAPTIVE COMPENSATION
Geraldo Francisco de Souza Rebou¸cas
January/2014
Advisor: Wallace Moreira Bessa Department: Mechanical Engineering
Sum´
ario
Lista de Figuras x
Lista de Tabelas xii
Lista de S´ımbolos xiii
Lista de Abreviaturas xv
1 Introdu¸c˜ao 1
1.1 Organiza¸c˜ao do Trabalho . . . 2
2 Sistemas Ca´oticos 4 2.1 Oscilador de Duffing . . . 5
2.2 Bifurca¸c˜oes . . . 8
2.3 Se¸c˜ao de Poincar´e . . . 11
2.4 Orbitas peri´odicas inst´aveis . . . 13´
3 T´opicos de Controle N˜ao Linear 17 3.1 Estabilidade . . . 17
3.1.1 Teoria de Estabilidade de Lyapunov . . . 18
3.2 Controle por Modos Deslizantes . . . 21
3.2.1 Aplica¸c˜ao com fun¸c˜ao sinal . . . 27
3.2.2 Aplica¸c˜ao com fun¸c˜ao de satura¸c˜ao . . . 31
3.3 Controle de Sistemas Ca´oticos . . . 31
3.3.1 Aplica¸c˜ao: ´Orbita Peri´odica Inst´avel . . . 34
4 Compensa¸c˜ao Adaptativa 37 4.1 Aplica¸c˜ao: ´Orbita Peri´odica Inst´avel . . . 41
5 Estabiliza¸c˜ao de ´Orbitas Peri´odicas Inst´aveis 44 5.1 Dependˆencia param´etrica . . . 45
5.2 Controle de Caos . . . 49
5.2.2 Aplica¸c˜ao: Varia¸c˜ao de ±10% . . . 50
5.2.3 Aplica¸c˜ao: Varia¸c˜ao de ±5% . . . 51
5.2.4 Aplica¸c˜ao: Varia¸c˜ao de ±1% . . . 52
5.2.5 Aplica¸c˜ao: ´Orbita gen´erica . . . 54
5.3 Estimativa do desempenho . . . 56
5.3.1 Aplica¸c˜ao: Varia¸c˜ao de +7% . . . 57
5.4 Estabiliza¸c˜ao de OPIs de periodicidade elevada . . . 57
6 Conclus˜oes 62 A Leis adaptativas integrais 64 A.1 Aplica¸c˜ao: ´Orbita gen´erica . . . 67
Lista de Figuras
2.1 Reprodu¸c˜ao do gr´afico obtido por Lorenz, (GLEICK, 1987) . . . 5
2.2 Desenho esquem´atico do pˆendulo for¸cado . . . 6
2.3 Configura¸c˜oes poss´ıveis para |a2|= 0,2 e|a3|= 1,19 . . . 7
2.4 Desenho esquem´atico da viga de Moon . . . 7
2.5 Diagrama de bifurca¸c˜ao para o mapa log´ıstico . . . 9
2.6 Diagrama de bifurca¸c˜ao para o estadox1 . . . 10
2.7 Amplia¸c˜oes da Figura 2.6 . . . 11
2.8 Aplica¸c˜ao das ideias de Poincar´e `a fun¸c˜ao senoidal . . . 12
2.9 Aplica¸c˜ao das ideias de Poincar´e a um problema mais complexo . . . 12
2.10 Se¸c˜oes de Poincar´e para o oscilador de Duffing da Eq. 2.3, ambas desprezando os primeiros 30% instantes iniciais . . . 13
2.11 Amplia¸c˜oes sucessivas da Figura 2.9 . . . 13
2.12 Rela¸c˜ao entre OPIs e a Se¸c˜ao de Poincar´e . . . 15
2.13 OPIs de per´ıodo 3 e 5 . . . 16
3.1 Visualiza¸c˜ao gr´afica de uma fun¸c˜ao de energia e sua derivada . . . 20
3.2 Representa¸c˜ao esquem´atica das fases de aproxima¸c˜ao e deslizamento no plano de fase do erro . . . 23
3.3 Representa¸c˜ao gr´afica do comportamento da fun¸c˜ao sinal, sgn(s) . . . 25
3.4 Modos deslizantes com fun¸c˜ao sinal . . . 29
3.5 Representa¸c˜ao gr´afica do comportamento da fun¸c˜ao de satura¸c˜ao, sat(s) 30 3.6 Representa¸c˜ao gr´afica da superf´ıcie de deslizamento com a fun¸c˜ao de satura¸c˜ao . . . 30
3.7 Modos deslizantes com fun¸c˜ao de satura¸c˜ao . . . 32
3.8 Compara¸c˜ao entre a OPI e a ´orbita gen´erica . . . 34
3.9 Modos deslizantes com fun¸c˜ao de satura¸c˜ao e OPI como referˆencia . . 35
4.1 Modos deslizantes com compensa¸c˜ao adaptativa . . . 42
5.1 Resposta temporal . . . 45
5.2 Se¸c˜oes de Poincar´e para diferentes valores de a3 . . . 46
5.4 Compara¸c˜ao entre as OPIs de per´ıodo 3 . . . 48
5.5 Compara¸c˜ao entre as OPIs de per´ıodo 5 . . . 48
5.6 Modos deslizantes suavizados . . . 50
5.7 Modos deslizantes suavizados e compensa¸c˜ao adaptativa . . . 51
5.8 Varia¸c˜ao de ±10%: Modos deslizantes e compensa¸c˜ao adaptativa . . . 52
5.9 Varia¸c˜ao de ±5%: Modos deslizantes e compensa¸c˜ao adaptativa . . . 53
5.10 Varia¸c˜ao de ±1%: Modos deslizantes e compensa¸c˜ao adaptativa . . . 54
5.11 Estabiliza¸c˜ao de uma ´orbita gen´erica . . . 55
5.12 Desempenho do CMD+CA em fun¸c˜ao da varia¸c˜ao param´etrica . . . . 58
5.13 Varia¸c˜ao de +7%: Modos deslizantes e compensa¸c˜ao adaptativa . . . 59
5.14 OPI de per´ıodo 3, varia¸c˜ao de +10% . . . 60
5.15 OPI de per´ıodo 5, varia¸c˜ao de +10% . . . 61
A.1 Modos deslizantes com compensa¸c˜ao adaptativa . . . 68
A.2 Comportamento dos coeficientes we,i . . . 69
A.3 Modos deslizantes com compensa¸c˜ao adaptativa normalizada . . . 70
A.4 Compensa¸c˜ao adaptativa normalizada: comportamento dos coefici-entes we,i. . . 71
A.5 Modos deslizantes com compensa¸c˜ao adaptativa, we unit´ario . . . 72
Lista de Tabelas
3.1 Resultados obtidos pelo controlador por modos deslizantes . . . 31
3.2 Controlador por modos deslizantes, OPI e ´orbita gen´erica . . . 34
4.1 Controlador adaptativo por modos deslizantes . . . 43
5.1 Compara¸c˜ao entre o CMD e o CMD+CA . . . 50
5.2 Desempenho do controlador por modos deslizantes com compensa¸c˜ao adaptativa . . . 56
5.3 Desempenho do controlador por modos deslizantes com compensa¸c˜ao adaptativa para OPIs . . . 57
5.4 An´alise das estimativas . . . 57
Lista de S´ımbolos
ai i-´esima constante, p. 6
ω Frequˆencia de oscila¸c˜ao, p. 6
t Tempo, p. 6
x Vetor de estado, p. 8
xi i-´esima vari´avel de estado do sistema, ou i-´esima componente do vetor de estado, p. 8
y Sa´ıda de interesse de determinado sistema, p. 8
T Per´ıodo de oscila¸c˜ao, p. 11
Pi i-´esimo ponto da se¸c˜ao de Poincar´e, p. 14
j Periodicidade de determinada OPI, p. 14
r1 Distˆancia entre dois pontos na se¸c˜ao de Poincar´e, p. 14
V(·) Candidata a fun¸c˜ao de Lyapunov, p. 20
x(n) n-´esima derivada de x em rela¸c˜ao ao tempo, p. 21 f(t,x) Fun¸c˜ao que representa a dinˆamica do sistema, p. 21
b(t,x) Ganho do esfor¸co de controle, p. 21
u(t,x) Esfor¸co de controle, p. 21
fe(t,x) Estimativa para a fun¸c˜aof(t,x), p. 21
F(t,x) Fun¸c˜ao delimitadora, p. 21
bm Ganho m´ınimo do esfor¸co de controle, p. 21
bM Ganho m´aximo do esfor¸co de controle, p. 21
ei i-´esima componente do erro, p. 22
xi,d i-´esima vari´avel de estado desejada, p. 22 e Vetor de erro, p. 22
xd Vetor de estado desejado, p. 22
s Vari´avel de deslizamento, p. 22
λ Taxa de convergˆencia do erro, p. 22 c Vetor de coeficientes, p. 23
η Taxa de convergˆencia para a superf´ıcie de deslizamento, p. 24
ue Estimativa do esfor¸co de controleu(t,x), p. 24
K ganho da fun¸c˜ao sinal e da fun¸c˜ao de satura¸c˜ao, p. 25
EQM Erro quadr´atico m´edio, p. 26
p Quantidade de itera¸c˜oes, p. 26
φ Espessura da regi˜ao limite, p. 29
d(t,x) Perturba¸c˜oes, dist´urbios externos e dinˆamica n˜ao modelada, p. 37
δ Valor limite das perturba¸c˜oes e dist´urbios, p. 37
de(t) Termo de compensa¸c˜ao adaptativa, p. 39 we Vetor de coeficientes de Fourier, p. 40
θ(t) Vetor de fun¸c˜oes senoidais, p. 40
σ Diferen¸ca percentual param´etrica, p. 44
Lista de Abreviaturas
EDO Equa¸c˜ao Diferencial Ordin´aria, p. 5 OPI Orbita Peri´odica Inst´avel, p. 14´
CMD Controle/Controlador por Modos Deslizantes, p. 21 EQM Erro Quadr´atico M´edio, p. 26
Cap´ıtulo 1
Introdu¸
c˜
ao
Desde a segunda metade do s´eculo passado f´ısicos, bi´ologos, matem´aticos, enge-nheiros, economistas dentre outros desenvolveram uma nova abordagem para a com-plexidade existente na natureza, o Caos. Com ele passamos a perceber organiza¸c˜ao e padr˜oes onde antes s´o havia aleatoriedade, imprevisibilidade e irregularidade.
O comportamento ca´otico tem sido amplamente observado na natureza, tanto em fenˆomenos f´ısicos e qu´ımicos quanto em sistemas biol´ogicos. O caos tamb´em est´a presente em diversas aplica¸c˜oes de engenharia, sejam elas mecˆanicas ou el´etricas, podendo ser encontrado em simples osciladores mecˆanicos e nos mais avan¸cados sistemas de comunica¸c˜ao. No que concerne aos sistemas mecˆanicos, comumente os efeitos das n˜ao-linearidades sobre o comportamento dinˆamico do sistema s˜ao de car´ater indesej´avel.
Recentemente tem-se verificado que existem situa¸c˜oes nas quais a riqueza da dinˆamica n˜ao-linear torna-se atraente. O comportamento ca´otico, por exemplo, possui uma grande sensibilidade `as condi¸c˜oes iniciais e ao valor dos parˆametros, o que implica no fato de que mudan¸cas significativas no comportamento de um sistema ca´otico podem ser atingidas mediante pequenas varia¸c˜oes param´etricas. Deste modo, esta caracter´ıstica pode ser extremamente favor´avel quando se tem por objetivo dar maior flexibilidade ao sistema dinˆamico controlado.
A infinidade de ´orbitas peri´odicas inst´aveis, OPIs que est˜ao associadas a uma resposta ca´otica, nos permite, atrav´es de pequenas corre¸c˜oes em um ´unico parˆametro de controle, conseguir que um sistema ca´otico se adeque `as mais variadas condi¸c˜oes, e se comporte de modo inteiramente distinto, conforme a situa¸c˜ao desejada (OTT
et al., 1990).
apenas seu diagrama de bifurca¸c˜ao, mas tamb´em como se comportam suas se¸c˜oes de Poincar´e e suas ´orbitas peri´odicas inst´aveis. Vale ressaltar a importˆancia deste estudo uma vez que na pr´atica conseguimos obter apenas valores aproximados para os parˆametros do modelo, que podem alterar seu comportamento mesmo estando pr´oximos aos valores reais do sistema f´ısico.
O controle por modos deslizantes, desenvolvido na extinta Uni˜ao Sovi´etica com os trabalhos de EMELYANOV e KOSTYLEVA (1964), FILIPPOV (1964), ITKIS (1976), UTKIN (1977) dentre outros, tem como objetivo dividir a tarefa de controle em um conjunto de sub tarefas mais simples (SLOTINE e LI, 1991), sendo ampla-mente utilizado no controle de diversos sistemas n˜ao lineares, e aplicado tamb´em a sistemas ca´oticos, devido `as suas caracter´ısticas de tolerˆancia em rela¸c˜ao a dist´urbios e incertezas de modelagem, conforme mostrado em ABLAY (2009), DADRASet al.
(2009) e SALARIEH e ALASTY (2009), n˜ao oferecidas pelos m´etodos cl´assicos de controle de caos, (FUH e TUNG, 1996).
No entanto esta estrat´egia pode resultar em oscila¸c˜oes de alta frequˆencia no esfor¸co de controle, fato indesejado a sistemas mecˆanicos. Para contornar este pro-blema podemos suavizar o esfor¸co de controle. No entanto, essa solu¸c˜ao implica no surgimento de uma regi˜ao de erro residual.
Com o objetivo de reduzir o erro residual podemos adotar estrat´egias de com-pensa¸c˜ao adaptativa, conforme observado em BARI ´C et al. (2005), que utilizam redes neurais do tipo perceptron de m´ultiplas camadas, e HUANG e KUO (2001) que utilizam s´eries de Fourier para a aproxima¸c˜ao do termo compensador. Al´em de BESSA et al. (2013), BESSA et al. (2012), BESSA et al. (2009) e LAYEGHI
et al. (2008), que utilizam l´ogica difusa como fun¸c˜ao aproximadora para controlar sistemas ca´oticos.
Neste trabalho analisaremos como o esfor¸co de controle, necess´ario para estabi-lizar uma OPI, se comporta frente a diferentes n´ıveis de varia¸c˜ao param´etrica. Para tanto, utilizaremos o controle por modos deslizantes com compensa¸c˜ao adaptativa cujas fun¸c˜oes de base comp˜oem uma s´erie de Fourier. Para o desenvolvimento do controlador utilizaremos inicialmente ´orbitas gen´ericas, passando em seguida a utili-zar como referˆencia OPIs pertencentes ao modelo nominal, finalizando com a adi¸c˜ao do termo de compensa¸c˜ao adaptativa para reduzir o erro residual.
1.1
Organiza¸
c˜
ao do Trabalho
Visando facilitar o entendimento deste trabalho decidimos divid´ı-lo em 5 cap´ıtulos. Este primeiro cap´ıtulo contempla uma introdu¸c˜ao sobre o tema de estudo, apresen-tando nossa motiva¸c˜ao inicial, bem como os objetivos que esperamos alcan¸car.
oscilador de Duffing, falando de sua hist´oria, aplica¸c˜ao em diversos campos da en-genharia e interpreta¸c˜ao f´ısica. Em seguida conceituamos algumas das principais ferramentas para an´alise de sistemas ca´oticos, como o diagrama de bifurca¸c˜ao e a se¸c˜ao de Poincar´e, aplicando-as ao oscilador de Duffing. Tratamos tamb´em da iden-tifica¸c˜ao de ´orbitas peri´odicas inst´aveis, que, conforme veremos adiante, tˆem papel fundamental no controle de caos.
Iniciamos o Cap´ıtulo 3 com a defini¸c˜ao de estabilidade, e uma r´apida introdu¸c˜ao sobre a teoria de estabilidade de Lyapunov. Em seguida desenvolvemos um contro-lador por modos deslizantes, inicialmente utilizando a fun¸c˜ao sinal e posteriormente a fun¸c˜ao de satura¸c˜ao. Em ambos os casos controlamos o oscilador de Duffing numa ´orbita gen´erica. Em seguida apresentamos uma breve revis˜ao sobre as estrat´egias cl´assicas para controle de sistemas ca´oticos, que se baseiam na utiliza¸c˜ao de ´orbitas peri´odicas inst´aveis, devido a pequena quantidade de energia necess´aria para es-tabiliz´a-las. Utilizando modos deslizantes para controlar uma OPI de per´ıodo 1, pudemos notar a diminui¸c˜ao no esfor¸co de controle em rela¸c˜ao a ´orbita gen´erica.
No Cap´ıtulo 4, apresentamos a estrat´egia de compensa¸c˜ao adaptativa para di-minuir o erro residual apresentado pela utiliza¸c˜ao da fun¸c˜ao de satura¸c˜ao no con-trolador por modos deslizantes. Como fun¸c˜ao aproximadora utilizamos uma s´erie de Fourier truncada em 3 termos, cujos coeficientes, os termos que multiplicam as fun¸c˜oes trigonom´etricas, s˜ao ajustados utilizando uma lei de adapta¸c˜ao deduzida com base na teoria de Lyapunov.
Para avaliar o desempenho do termo de compensa¸c˜ao e de sua lei adaptativa, controlamos novamente a OPI de per´ıodo 1 do cap´ıtulo anterior, comparando o desempenho de ambos os controladores n˜ao apenas graficamente, mas tamb´em com o erro quadr´atico m´edio obtido em cada caso.
No come¸co do Cap´ıtulo 5 estudamos a sensibilidade param´etrica do oscilador de Duffing, com foco sobre o parˆametro que multiplica o termo c´ubico. Analisamos como se comportam sua resposta temporal, sua se¸c˜ao de Poincar´e e as OPIs que fazem parte de cada configura¸c˜ao.
Em seguida utilizamos o controlador por modos deslizantes com compensa¸c˜ao adaptativa desenvolvido no Cap´ıtulo 4 para estabilizar uma OPI de per´ıodo 1 sub-metida a diferentes n´ıveis de varia¸c˜ao param´etrica. Com isso, pudemos derivar rela¸c˜oes entre os coeficientes de performance do controlador utilizado e a varia¸c˜ao param´etrica sobre o sistema. Conclu´ımos este cap´ıtulo com a estabiliza¸c˜ao de OPIs de periodicidade elevada.
No Cap´ıtulo 6 apresentamos nossas considera¸c˜oes finais, conclus˜oes obtidas, e sugest˜oes para trabalhos futuros.
Cap´ıtulo 2
Sistemas Ca´
oticos
Com o surgimento da ciˆencia moderna em meados do s´eculo XVI, a humanidade come¸cou a procurar a explica¸c˜ao para os fenˆomenos presentes na natureza, bus-cando entendˆe-la por completo. Inicialmente estudou-se o movimento dos corpos, avan¸cando em seguida com o estudo dos fluidos, ondas, eletricidade etc. (GLEICK, 1987).
Na literatura existem v´arios trabalhos que se prop˜oem a desvendar os fenˆomenos da natureza utilizando v´arios modelos matem´aticos que levam em considera¸c˜ao v´arias caracter´ısticas diferentes. Ap´os um estudo te´orico sobre cada modelo, prosse-gue-se com a realiza¸c˜ao de experimentos para comprovar a teoria. E nesse ponto sempre existem divergˆencias. Normalmente considera-se que tal fato se deve a al-guns fatores desprezados no modelo te´orico, tais como resistˆencia do ar, ru´ıdo, atrito, dentre outros.
Algumas justificativas para se desprezar as n˜ao linearidades s˜ao a busca de um melhor entendimento do sistema atrav´es de sua simplifica¸c˜ao, ou que os termos n˜ao lineares podem ser aproximados linearmente, ou at´e que eles s˜ao desprez´ıveis.
Na mecˆanica dos fluidos e sistemas mecˆanicos os termos n˜ao lineares tendem a ser os termos que queremos deixar de fora quando buscamos compreender estes conceitos de uma maneira mais simples. Sem o atrito, por exemplo, a equa¸c˜ao do movimento representa uma condi¸c˜ao singular, como o deslizar de um disco de h´oquei no gelo. O atrito altera a velocidade e sofre altera¸c˜oes por causa da velocidade, o que cria um comportamento de grande riqueza, n˜ao observado em sistemas lineares. Em meados do s´eculo XX, com o surgimento dos primeiros computadores, cientis-tas e engenheiros come¸caram a utilizar tais m´aquinas para simular o comportamento de sistemas reais e assim as simula¸c˜oes passaram a ser um novo tipo de experimento. Em suas simula¸c˜oes, o meteorologista e matem´atico americano Edward Lorenz1,
visando diminuir o tempo de processamento computacional de seu experimento
1
num´erico, resolveu simplificar um modelo de equa¸c˜oes (diferenciais parciais) con-vectivas2 em trˆes equa¸c˜oes diferenciais ordin´arias, EDOs, preservando, no entanto,
suas caracter´ısticas n˜ao lineares. Com isso ele obteve alguns resultados estranhos para v´arias repeti¸c˜oes da mesma simula¸c˜ao, (LORENZ, 1963).
Buscando aumentar a dura¸c˜ao de seu experimento computacional, Lorenz uti-lizou dados obtidos no decorrer de uma simula¸c˜ao anterior. Na verdade ele arre-dondou dados impressos pelo computador pois pensava que pequenas altera¸c˜oes nas condi¸c˜oes iniciais do seu sistema de EDOs n˜ao lineares seriam irrelevantes, tal como acontece para sistemas lineares. No entanto observou-se o contr´ario, um gr´afico com os dois experimentos, como o da Figura 2.1, mostrou que ao inv´es de tenderem a se aproximar, as curvas se afastaram, de modo que ap´os algumas itera¸c˜oes os gr´aficos s˜ao completamente distintos.
Figura 2.1: Reprodu¸c˜ao do gr´afico obtido por Lorenz, (GLEICK, 1987) Era o Efeito Borboleta: para pequenas varia¸c˜oes nas condi¸c˜oes meteorol´ogicas qualquer previs˜ao perde o valor rapidamente. Os erros e as incertezas se multipli-cam, formando um efeito de cascata ascendente atrav´es de uma cadeia de aspectos turbulentos, que v˜ao de tormentas a redemoinhos continentais. O Efeito Borboleta ganhou assim um nome t´ecnico: dependˆencia sens´ıvel `as condi¸c˜oes iniciais.
2.1
Oscilador de Duffing
A equa¸c˜ao de Duffing ´e uma EDO n˜ao linear de segunda ordem que, conforme pode ser observado em BRENNAN e KOVACIC (2011), descreve o comportamento qualitativo e quantitativo de v´arios sistemas f´ısicos como circuitos el´etricos, vigas, rotores, placas, fibras ´opticas, cascas e alguns sistemas biol´ogicos. Possui este nome em homenagem ao Engenheiro Mecˆanico alem˜ao Georg Duffing (1861–1944) que foi um dos pioneiros na an´alise de sistemas n˜ao lineares, tratando do comportamento de sistemas cuja rigidez n˜ao obedece a lei de Hooke. Em seu trabalho, Duffing analisou inicialmente a dinˆamica de um pˆendulo livre prosseguindo com a an´alise do caso for¸cado, conforme mostrado na Figura 2.2.
2
ωt M sen
m
θ
m g
l
Figura 2.2: Desenho esquem´atico do pˆendulo for¸cado
ml2d2θ
dt2 +mglsenθ =Msenωt
Para chegar a sua famosa equa¸c˜ao, Duffing utilizou s´eries de Taylor3, uma
ferra-menta comumente utilizada para lineariza¸c˜ao de sistemas n˜ao lineares. No entanto, ao linearizar o termo senθ em torno de 0 rad, Duffing foi al´em e, em vez de consi-derar apenas o primeiro termo da s´erie, que ´e a pr´atica tradicional, ele considerou tamb´em o termo c´ubico, gerando assim um polinˆomio n˜ao linear.
ml2d 2θ
dt2 +mgl
θ− θ
3
6
=Msenωt (2.1)
Apesar de continuar com um sistema n˜ao linear, Duffing passou de uma equa¸c˜ao diferencial transcendental para uma equa¸c˜ao diferencial alg´ebrica, o que auxiliou na obten¸c˜ao dos pontos de equil´ıbrio para o caso de oscila¸c˜oes livres. Utilizando esta abordagem ele obteve uma melhor descri¸c˜ao matem´atica do comportamento real do sistema.
Neste trabalho analisaremos a forma geral desta equa¸c˜ao, que adiciona amorte-cimento viscoso linear ao sistema estudado originalmente por Duffing. Com isso, chegamos a seguinte equa¸c˜ao:
¨
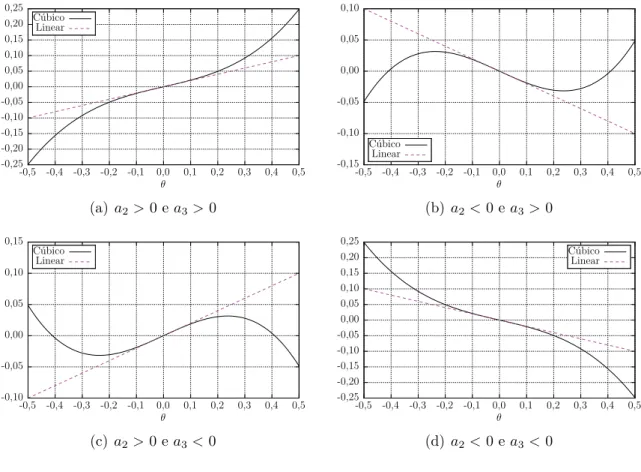
θ+a1θ˙+a2θ+a3θ3 =a4sen(ωt) (2.2) onde as constantes a1, a2, a3 e a4 representam, respectivamente, os coeficientes de amortecimento, rigidez linear, rigidez c´ubica e a amplitude do for¸camento senoidal. Do ponto de vista mecˆanico, podemos entender o termoa2θ+a3θ3como uma mola
que apresenta rigidez n˜ao linear com o parˆametroa2dominando o comportamento do sistema para pequenos deslocamentos e o termoa3 definindo o comportamento para grandes deslocamentos, conforme pode ser percebido na Figura 2.3, onde podemos
3
perceber que o comportamento reala2θ+a3θ3 se aproxima do comportamento linear a2θ em torno da origem.
-0,25 -0,20 -0,15 -0,10 -0,05 0,00 0,05 0,10 0,15 0,20 0,25
-0,5 -0,4 -0,3 -0,2 -0,1 0,0 0,1 0,2 0,3 0,4 0,5
θ
C´ubico Linear
(a) a2>0 ea3>0
-0,15 -0,10 -0,05 0,00 0,05 0,10
-0,5 -0,4 -0,3 -0,2 -0,1 0,0 0,1 0,2 0,3 0,4 0,5
θ
C´ubico Linear
(b) a2<0 ea3>0
-0,10 -0,05 0,00 0,05 0,10 0,15
-0,5 -0,4 -0,3 -0,2 -0,1 0,0 0,1 0,2 0,3 0,4 0,5
θ
C´ubico Linear
(c) a2>0 ea3<0
-0,25 -0,20 -0,15 -0,10 -0,05 0,00 0,05 0,10 0,15 0,20 0,25
-0,5 -0,4 -0,3 -0,2 -0,1 0,0 0,1 0,2 0,3 0,4 0,5
θ
C´ubico Linear
(d) a2<0 ea3<0
Figura 2.3: Configura¸c˜oes poss´ıveis para |a2|= 0,2 e |a3|= 1,19
Na Figura 2.3(a), temos uma mola n˜ao linear de rigidez positiva, enquanto que na Figura 2.3(d) temos uma mola de rigidez negativa. J´a nas Figuras 2.3(b) e 2.3(c) temos o comportamento de duplo po¸co, nesse caso o sistema possui trˆes pontos de equil´ıbrio, sendo um deles inst´avel. Observando a Eq. 2.1 do pˆendulo, por exemplo, podemos perceber que este sistema apresenta comportamento de duplo po¸co, cor-respondendo a Figura 2.3(c). O caso em que a2 < 0 e a3 > 0 corresponde a viga de MOON e HOLMES (1979), mostrada na Figura 2.4, que se trata de uma viga el´astica sujeita a flambagem devido a for¸cas de corpo magn´eticas.
viga
Imãs ω
F cos t
Fazendoθ=x1 e ˙θ =x2, em que: x= [x1 x2]T e definindo a sa´ıda de interesse do sistema como: y = x1, podemos reescrever a Eq. 2.2 em vari´aveis de estado, chegando a:
˙
x1 =x2
˙
x2 =−a1x2−a2x1−a3x31+a4sen(ωt) (2.3)
y =x1
Ap´os esta breve discuss˜ao sobre o oscilador de Duffing, com sua hist´oria, for-mula¸c˜ao matem´atica e caracter´ısticas f´ısicas, daremos continuidade a este cap´ıtulo com a an´alise de suas caracter´ısticas n˜ao lineares b´asicas, que est˜ao presentes na mai-oria destes sistemas, bem como suas outras caracter´ısticas, que fazem deste sistema um sistema ca´otico.
2.2
Bifurca¸
c˜
oes
Muito antes de descobrirmos o fenˆomeno da dependˆencia sens´ıvel `as condi¸c˜oes iniciais j´a sab´ıamos que o comportamento qualitativo de um sistema depende dos valores de seus parˆametros. Um sistema linear massa mola amortecedor de segunda ordem por exemplo, pode apresentar oscila¸c˜oes subamortecidas, criticamente amor-tecidas, sobreamortecidas ou at´e inst´aveis, dependendo do valor de cada parˆametro. O mesmo ocorre para os sistemas n˜ao lineares, que podem apresentar comporta-mento de sela, n´o ou centro, que por sua vez podem ser est´aveis, inst´aveis ou dege-nerados (WIGGINS, 1990).
Toda mudan¸ca qualitativa no comportamento do sistema em fun¸c˜ao de seus parˆametros recebe o nome de bifurca¸c˜ao. A literatura est´a repleta de sistemas que apresentam bifurca¸c˜oes dos mais variados tipos. Um sistema cl´assico que apresenta bifurca¸c˜oes ´e omapa log´ıstico, proposto por MAY (1976), que consiste num sistema discreto que pode ser aplicado em sistemas biol´ogicos, econˆomicos e sociais:
xi+1 =axi(1−xi) (2.4)
Aplicando a Eq. 2.4 `a an´alise do crescimento populacional podemos interpretarxi como a quantidade de habitantes em determinado intervalo de tempoie o parˆametro
a como a taxa de crescimento populacional. Al´em disso, percebemos que o termo 1−xi mant´em o crescimento dentro de certos limites, pois quandoxi aumenta 1−xi diminui.
Fi-gura 2.5. Nela, percebemos que os diferentes valores dea definem o comportamento qualitativo para o mapa log´ıstico, que pode tender a um valor constante, oscilar entre 2, 4 ou mais valores ou n˜ao convergir para nenhum valor em especial.
0,0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0
1,0 1,5 2,0 2,5 3,0 3,5 4,0
xi
a
Figura 2.5: Diagrama de bifurca¸c˜ao para o mapa log´ıstico
Verifica-se, por exemplo, que variando o parˆametro a de 2,9 para 3,1 percebe-se uma mudan¸ca no comportamento da popula¸c˜ao, passando de um valor fixo para um estado de alternˆancia populacional e tal mudan¸ca representa umabifurca¸c˜ao no sistema. Varia¸c˜oes adicionais do parˆametro provocam mudan¸cas extremas no com-portamento, tais como quase-periodicidade e caos. Com a descoberta da dinˆamica ca´otica, as pesquisas se concentraram em descobrir como a natureza de um sistema muda drasticamente.
Geralmente, para sistemas for¸cados, como ´e o caso do oscilador de Duffing, ana-lisamos a influˆencia da amplitude do for¸camento na resposta do sistema, como em SHARMA et al.(2012), SIEWE e HEGAZY (2011) e MATSUMOTO et al. (1984). No entanto, podemos utilizar o diagrama de bifurca¸c˜ao para estudar a influˆencia de qualquer parˆametro de determinado sistema, como em DOS SANTOS e SAVI (2009) e MACHADOet al.(2003), onde, al´em da amplitude do for¸camento, se estu-dam outros parˆametros importantes, como por exemplo a frequˆencia do for¸camento senoidal.
Na pr´atica de engenharia, a modelagem se configura como uma das maiores fontes de erro, que pode surgir quando desprezamos parcelas importantes da dinˆamica do sistema (dinˆamica n˜ao modelada) ou durante a determina¸c˜ao de seus parˆametros. Da´ı a necessidade de analisarmos a influˆencia de cada parˆametro para a resposta desejada.
0,05, a2 =−0,2, a3 = 1,19,a4 = 6,6 e ω = 1,0, obtemos a seguinte equa¸c˜ao: ˙
x1 =x2
˙
x2 =−0,05x2+ 0,2x1 −1,19x3
1+ 6,6 sen(t)
(2.5)
Ainda em rela¸c˜ao a importˆancia do termo c´ubico, salientamos que, caso des-prez´assemos sua influˆencia, ou sejaa3 = 0, obter´ıamos um sistema inst´avel4. O que
n˜ao acontece devido a presen¸ca deste termo.
Para simular o comportamento deste sistema implementamos o m´etodo de Runge-Kutta5 de quarta ordem utilizando a linguagem de programa¸c˜ao C++, com
atua-liza¸c˜ao dos estadosxi do sistema a cada 2π×10−3 unidades de tempo.
Conforme mencionado anteriormente, nossa sa´ıda de interesse ´e a vari´avel de estado x1 e por isso, analisaremos seu comportamento quando a3 varia entre 0,4 e 1,4; conforme mostrado na Figura 2.6.
Neste pequeno intervalo podemos notar alguns aspectos importantes. Inicial-mente temos uma varia¸c˜ao na periodicidade do sistema, que come¸ca com per´ıodo 1 para a3 = 0,4, sofrendo bifurca¸c˜ao antes que a3 seja 0,5, passando a apresentar per´ıodo 2. Quandoa3 ≈0,58, ocorre nova bifurca¸c˜ao e o sistema passa a apresentar per´ıodo 4, conforme Figura 2.7(a).
-2,5 -2,0 -1,5 -1,0 -0,5 0,0 0,5 1,0 1,5 2,0 2,5
0,4 0,5 0,6 0,7 0,8 0,9 1,0 1,1 1,2 1,3 1,4
x1
a3
Figura 2.6: Diagrama de bifurca¸c˜ao para o estado x1
No entanto este comportamento n˜ao permanece por muito tempo. Antes que
a3 seja 0,6 temos o in´ıcio do comportamento ca´otico, que por sua vez d´a lugar ao comportamento peri´odico em alguns trechos, como por exemplo,a3 = 0,66 e pouco antes de a3 = 0,7, conforme mostrado na Figura 2.7(a). Tais trechos de compor-tamento peri´odico em meio ao comporcompor-tamento ca´otico recebem o nome de janelas peri´odicas. De forma similar o comportamento ca´otico em meio ao comportamento peri´odico pode ser chamado de janela ca´otica.
4
As ra´ızes da equa¸c˜ao caracter´ıstica da solu¸c˜ao homogˆenea da EDO linear resultante seriam:
ρ1=−0,473 (est´avel) eρ2= +0,423 (inst´avel). 5
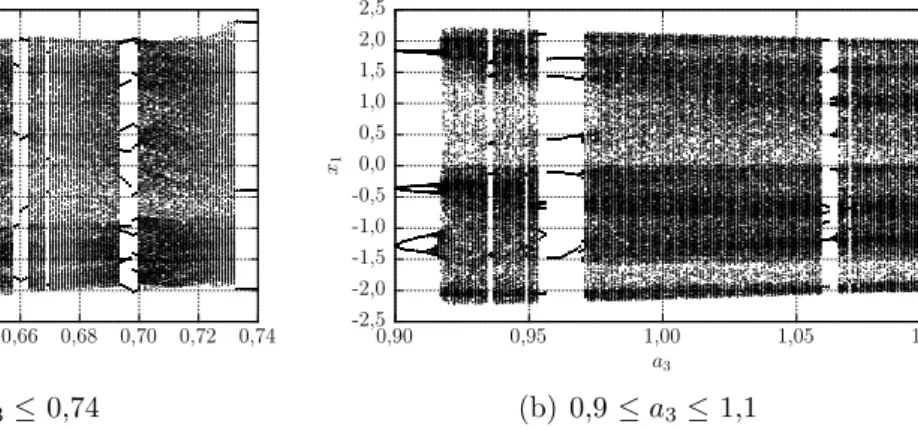
Situa¸c˜oes semelhantes ocorrem na Figura 2.7(b), onde o comportamento ca´otico volta a ocorrer. Tal an´alise mostra a importˆancia cr´ıtica do parˆametro a3 para o sistema, uma vez que diferen¸cas m´ınimas separam o comportamento peri´odico do ca´otico.
-2,5 -2,0 -1,5 -1,0 -0,5 0,0 0,5 1,0 1,5 2,0 2,5
0,56 0,58 0,60 0,62 0,64 0,66 0,68 0,70 0,72 0,74
x1
a3
(a) 0,56≤a3≤0,74
-2,5 -2,0 -1,5 -1,0 -0,5 0,0 0,5 1,0 1,5 2,0 2,5
0,90 0,95 1,00 1,05 1,10
x1
a3
(b) 0,9≤a3≤1,1
Figura 2.7: Amplia¸c˜oes da Figura 2.6
2.3
Se¸
c˜
ao de Poincar´
e
Durante a an´alise do comportamento de um sistema, a investiga¸c˜ao sobre sua pe-riodicidade ´e uma quest˜ao fundamental. Sabendo disso, Henri Poincar´e6, enquanto
estudava o problema dos trˆes corpos7, teve a ideia de reduzir a dimens˜ao do mesmo,
analisando apenas informa¸c˜oes em instantes de tempo pr´e-determinados.
Tomemos como exemplo uma EDO de segunda ordem ¨x = f(t, x). Na ´epoca de Poincar´e, uma das ferramentas mais utilizadas para an´alise de um sistema deste tipo era o plano de fase que, dependendo de f(t, x), pode ter uma forma bastante complexa. Para driblar este problema, ele propˆos a an´alise do que acontece apenas em intervalos de tempo pr´e-fixados, gerando um mapa discreto do sistema.
Por exemplo, suponha que a solu¸c˜ao para a EDO do par´agrafo anterior seja dada por x= sent. Se em vez de analisarmos todo o seu comportamento ao longo do tempo, analisarmos apenas o que acontece em cada instante ti = iT, onde i = 0,1,2, . . . e T = 2π, obteremos gr´aficos mais simples sem perder informa¸c˜oes sobre a periodicidade do sistema, uma vez que os pontos em destaque na Figura 2.8(a) d˜ao uma ideia sobre o comportamento oscilat´orio da solu¸c˜ao, sem que seja preciso visualizar sua solu¸c˜ao completa. Tal ideia aparece novamente na Figura 2.8(b) onde conseguimos descobrir que al´em de peri´odica a solu¸c˜ao possui per´ıodo 1, uma vez
6
F´ısico-matem´atico francˆes (1854–1912)
7
Problema proposto para analisar a estabilidade do sistema solar, estudando inicialmente a ´
que os pontos se sobrep˜oem. De posse da se¸c˜ao de Poincar´e, um gr´afico mais simples que o plano de fase, podemos verificar facilmente a periodicidade do sistema.
-1,0 -0,8 -0,6 -0,4 -0,2 0,0 0,2 0,4 0,6 0,8 1,0
0,0 5,0 10,0 15,0 20,0
x
t
(a) Resposta temporal
-1,0 -0,5 0,0 0,5 1,0
-1,0 -0,5 0,0 0,5 1,0
˙
x
x
(b) ´Orbita no plano de fase
Figura 2.8: Aplica¸c˜ao das ideias de Poincar´e `a fun¸c˜ao senoidal
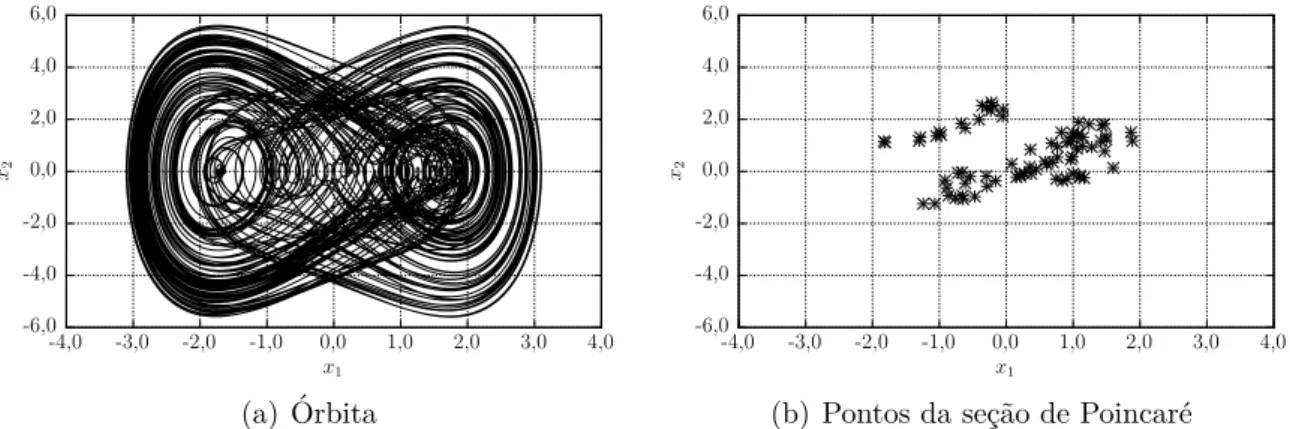
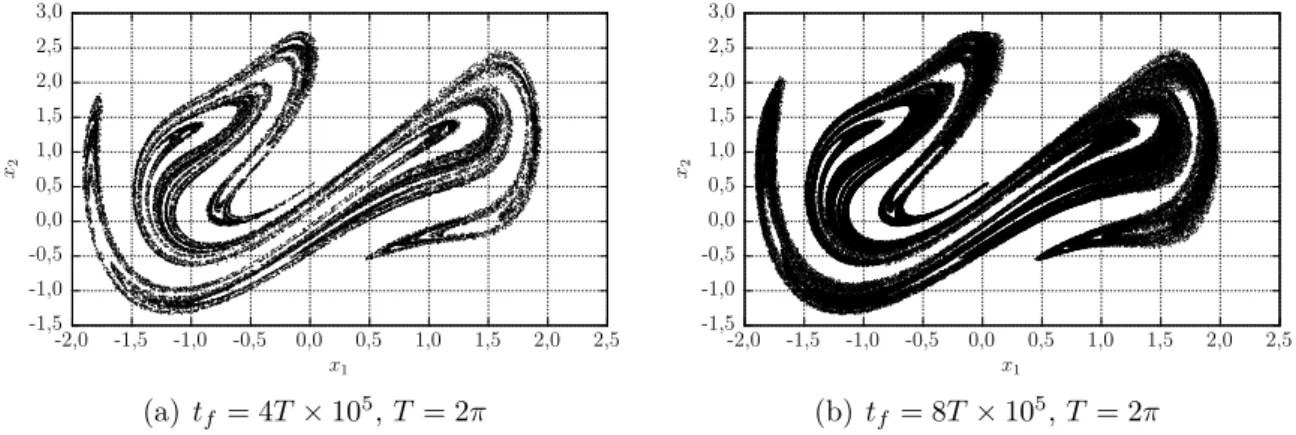
Dada a simplicidade do exemplo anterior, podemos at´e duvidar da eficiˆencia da t´ecnica proposta por Poincar´e. No entanto, para sistemas que n˜ao possuem peri-odicidade definida, como os sistemas ca´oticos, a se¸c˜ao de Poincar´e ´e de extrema importˆancia. Observe, por exemplo, a Figura 2.9 que mostra o comportamento do oscilador de Duffing dado pela Eq. 2.3 em suas primeiras 500 unidades de tempo. Nesse curto espa¸co de tempo podemos notar sua complexidade, conforme apresen-tado no plano de fase da Figura 2.9(a). Analisando sua Se¸c˜ao de Poincar´e, perce-bemos a forma¸c˜ao de um aglomerado de pontos numa regi˜ao central do plano de fase. Estendendo nossa an´alise a intervalos de tempo cada vez maiores, conforme mostrado na Figura 2.10, percebemos o desenvolvimento de um padr˜ao neste aglo-merado de pontos, que passa a apresentar uma forma definida e invariante no tempo.
-6,0 -4,0 -2,0 0,0 2,0 4,0 6,0
-4,0 -3,0 -2,0 -1,0 0,0 1,0 2,0 3,0 4,0
x2
x1
(a) ´Orbita
-6,0 -4,0 -2,0 0,0 2,0 4,0 6,0
-4,0 -3,0 -2,0 -1,0 0,0 1,0 2,0 3,0 4,0
x2
x1
(b) Pontos da se¸c˜ao de Poincar´e
seu car´ater atrativo. Devido a esta propriedade importante podemos nos referir a cada uma das Figuras 2.10 como o atrator8 do oscilador de Duffing. Geralmente os
atratores dos sistemas ca´oticos possuem dimens˜ao fractal, sendo ent˜ao denominados
atratores estranhos.
Outra caracter´ıstica importante dos sistemas ca´oticos ´e que suas trajet´orias n˜ao se interceptam, apenas se localizam muito pr´oximas uma das outras. Na Figura 2.9 temos a impress˜ao de que alguns trechos da ´orbita se sobrep˜oem, no entanto isso n˜ao acontece, como pode ser comprovado na Figura 2.11.
-1,5 -1,0 -0,5 0,0 0,5 1,0 1,5 2,0 2,5 3,0
-2,0 -1,5 -1,0 -0,5 0,0 0,5 1,0 1,5 2,0 2,5
x2
x1
(a) tf = 4T×105,T = 2π
-1,5 -1,0 -0,5 0,0 0,5 1,0 1,5 2,0 2,5 3,0
-2,0 -1,5 -1,0 -0,5 0,0 0,5 1,0 1,5 2,0 2,5
x2
x1
(b) tf = 8T×105, T = 2π Figura 2.10: Se¸c˜oes de Poincar´e para o oscilador de Duffing da Eq. 2.3, ambas desprezando os primeiros 30% instantes iniciais
0,0 0,5 1,0 1,5 2,0
2,0 2,2 2,4 2,6 2,8 3,0
x2
x1
(a) Amplia¸c˜ao de uma parte da Figura 2.9
1,00 1,05 1,10 1,15 1,20 1,25 1,30 1,35 1,40 1,45 1,50
2,60 2,62 2,64 2,66 2,68 2,70 2,72 2,74 2,76 2,78 2,80
x2
x1
(b) Amplia¸c˜ao de uma parte da Figura 2.11(a)
Figura 2.11: Amplia¸c˜oes sucessivas da Figura 2.9
2.4
Orbitas peri´
´
odicas inst´
aveis
Dado um sistema peri´odico, se tomarmos pontos defasados de intervalos de tempo iguais obteremos uma quantidade de pontos igual ao per´ıodo do sistema, conforme mostrado na Figura 2.8 e discutido na Se¸c˜ao 2.3. J´a o regime ca´otico n˜ao possui
8
periodicidade definida e nesses casos utilizamos a se¸c˜ao de Poincar´e para observar a dispers˜ao dos pontos obtidos em intervalos de tempo iguais ao per´ıodo de excita¸c˜ao. Com isso obtemos uma infinidade de pontos que se acumulam dentro de uma regi˜ao do plano de ´area finita.
Por n˜ao possuir periodicidade definida, um sistema ca´otico oscila entre as vizi-nhan¸cas de v´arios pontos de equil´ıbrio com os mais variados per´ıodos, retornando, em alguns casos, ap´os algumas itera¸c˜oes. As ´orbitas peri´odicas inst´aveis, OPIs, surgem durante a passagem do sistema por essas vizinhan¸cas, s˜ao ´orbitas que n˜ao possuem estabilidade para tornar o comportamento peri´odico, apenas aparecem du-rante alguns instantes dando lugar a outra ´orbita de periodicidade distinta.
Atualmente existem diversos m´etodos para identifica¸c˜ao de OPIs. Por exemplo, FUH (2009) utiliza o algoritmo de Nelder-Mead, tratando o problema de detec¸c˜ao de ´orbitas como um problema de otimiza¸c˜ao, enquanto que DEANE e MARSH (2006) desenvolveram um m´etodo espec´ıfico para detec¸c˜ao de OPIs em sistemas for¸cados.
Al´em disso, PINGEL et al. (2001), com base no trabalho de DAVIDCHACK e LAI (1999), que identifica OPIs para sistemas discretos, desenvolveram um m´etodo similar para sistemas cont´ınuos baseado na se¸c˜ao de Poincar´e. Neste trabalho, utili-zaremos om´etodo dos pontos recorrentes pr´oximos, proposto por AUERBACHet al.
(1987), uma t´ecnica simples e pioneira na extra¸c˜ao de OPIs, que tamb´em se utiliza do conhecimento da se¸c˜ao de Poincar´e.
Para identificar uma ´orbita de per´ıodoj, o m´etodo dos pontos recorrentes pr´oxi-mos calcula a distˆancia euclidiana entre dois pontos da se¸c˜ao de Poincar´e defasados dej itera¸c˜oes. Se esta distˆancia for menor que um certo valorr1 ent˜ao este conjunto
de pontos corresponde a uma OPI de per´ıodoj.
||Pi−Pi+j|| ≤r1 (2.6)
Na Eq. 2.6 o parˆametroj representa o valor do per´ıodo procurado, o parˆametroi
varia de 1 at´e o n´umero de pontos da se¸c˜ao de Poincar´e menos o per´ıodo, Np−j,r1
representa a distˆancia entre dois pontos ePi ´e oi-´esimo ponto da se¸c˜ao de Poincar´e. Os estadosxdo sistema entre os pontosPi ePi+j que satisfazem a desigualdade 2.6 formam uma ´orbitaj-peri´odica.
Para exemplificar o funcionamento do m´etodo dos pontos recorrentes pr´oximos, obtivemos duas OPIs de per´ıodo 1 para o oscilador de Duffing com valor nominal do parˆametroa3, exibidas na Figura 2.12. Os pontos destacados em cada uma das ´orbitas das Figuras 2.12(a) e 2.12(b) s˜ao os pontos Pi e Pi+1 da se¸c˜ao de
Como, dadas as dimens˜oes da figura, a distˆancia entrePi ePi+1 ´e pequena, vide
Figura 2.12(c), temos a impress˜ao de que existe apenas um ponto em cada ´orbita, quando na verdade temos dois pontos a uma pequena distˆanciar1.
Como n˜ao temos como estimar um valor m´ınimo parar1 de modo que todo par
de pontos abaixo desta distˆancia formem uma OPI, decidimos utilizar a desigual-dade 2.6 para calcular as distˆancias entre todos os pontos da se¸c˜ao de Poincar´e, tomados de 2 a 2, ordenando cada par de maneira crescente, obtendo as menores distˆancias para as ´orbitas desejadas. Tivemos algumas dificuldades para encon-trar ´orbitas com periodicidade maior do que 1, pois quando busc´avamos ´orbitas de per´ıodo 2, por exemplo, encontr´avamos uma OPI de per´ıodo 1 que se repetia por 2 per´ıodos. -5,0 -4,0 -3,0 -2,0 -1,0 0,0 1,0 2,0 3,0 4,0 5,0
-2,5 -2,0 -1,5 -1,0 -0,5 0,0 0,5 1,0 1,5 2,0 2,5 3,0
x2
x1
(a) OPI de per´ıodo 1
-5,0 -4,0 -3,0 -2,0 -1,0 0,0 1,0 2,0 3,0 4,0 5,0
-3,0 -2,5 -2,0 -1,5 -1,0 -0,5 0,0 0,5 1,0 1,5 2,0 2,5
x2
x1
(b) Outra OPI de per´ıodo 1, com ´orbita espelhada em rela¸c˜ao a Figura 2.12(a)
0,55 0,56 0,57 0,58 0,59 0,60 0,61 0,62 0,63 0,64 0,65
-1,200 -1,195 -1,190 -1,185 -1,180
x2
x1
(c) Detalhe da Figura 2.12(a)
-1,5 -1,0 -0,5 0,0 0,5 1,0 1,5 2,0 2,5 3,0
-2,0 -1,5 -1,0 -0,5 0,0 0,5 1,0 1,5 2,0
x2
x1
Fig. 2.12(a) Fig. 2.12(b)
(d) OPIs na Se¸c˜ao de Poincar´e
Figura 2.12: Rela¸c˜ao entre OPIs e a Se¸c˜ao de Poincar´e
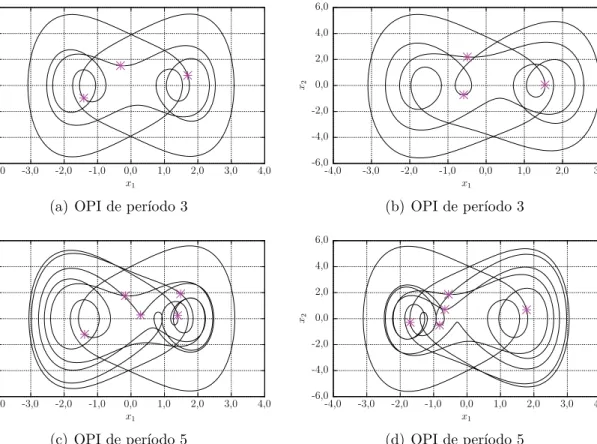
-6,0 -4,0 -2,0 0,0 2,0 4,0 6,0
-4,0 -3,0 -2,0 -1,0 0,0 1,0 2,0 3,0 4,0
x2
x1
(a) OPI de per´ıodo 3
-6,0 -4,0 -2,0 0,0 2,0 4,0 6,0
-4,0 -3,0 -2,0 -1,0 0,0 1,0 2,0 3,0
x2
x1
(b) OPI de per´ıodo 3
-6,0 -4,0 -2,0 0,0 2,0 4,0 6,0
-4,0 -3,0 -2,0 -1,0 0,0 1,0 2,0 3,0 4,0
x2
x1
(c) OPI de per´ıodo 5
-6,0 -4,0 -2,0 0,0 2,0 4,0 6,0
-4,0 -3,0 -2,0 -1,0 0,0 1,0 2,0 3,0 4,0
x2
x1
(d) OPI de per´ıodo 5
Cap´ıtulo 3
T´
opicos de Controle N˜
ao Linear
Podemos definir o controle n˜ao linear como o ramo da teoria de controle que lida tanto com sistemas n˜ao lineares como variantes no tempo. Enquanto o projeto de um controlador linear para um sistema como o oscilador de Duffing se baseia numa vers˜ao linearizada deste sistema, v´alida apenas na vizinhan¸ca de um ponto de opera¸c˜ao estipulado, um controlador n˜ao linear apresenta como vantagem uma maior faixa operacional.
Do ponto de vista pr´atico, podemos ressaltar que, como na natureza, o compor-tamento linear ´e uma raridade, a obten¸c˜ao de sensores e atuadores lineares se torna mais dif´ıcil e custosa. Da´ı o alto custo dos componentes de um sistema de controle linear, que demanda sensores e atuadores de elevada qualidade, devido a necessidade de apresentar comportamento linear em toda sua faixa de opera¸c˜ao, enquanto que um sistema de controle n˜ao linear pode utilizar componentes de menor qualidade e baixo custo, sem comprometer seu desempenho.
Outro ponto fraco da abordagem linear est´a na dificuldade de lineariza¸c˜ao de algumas n˜ao linearidades n˜ao diferenci´aveis como por exemplo o atrito de Coulomb, zona morta e histerese. Todos estes fatores contribuem para o desenvolvimento e aplica¸c˜ao de t´ecnicas de controle n˜ao linear, que al´em de considerarem mais detalhes do comportamento do sistema, abrangem uma maior faixa de opera¸c˜ao e utilizam equipamentos de menor custo.
3.1
Estabilidade
a afirma¸c˜ao anterior como:
Defini¸c˜ao 3.1. Estabilidade: O sistema ˙x = f(t,x) ´e dito est´avel se, para cada
ǫ >0 finito, existe δ=δ(ǫ)>0 tamb´em finito, tal que:
||x(0)||< δ ⇒ ||x(t)||< ǫ, ∀t≥0 (3.1) Al´em disso, de maneira mais restrita podemos definir:
Defini¸c˜ao 3.2. Estabilidade assint´otica: O sistema ˙x = f(t,x) ´e dito assintotica-mente est´avel se for est´avel e existirem δ e x¯ finitos tais que:
||x(0)||< δ ⇒ lim
t→∞x(t) = ¯x (3.2)
em que ¯x ´e conhecido como o ponto de equil´ıbrio do sistema. Percebe-se que a diferen¸ca entre ambas as defini¸c˜oes est´a no fato de que a Defini¸c˜ao 3.2 exige que o sistema convirja para um estado de equil´ıbrio enquanto que pela Defini¸c˜ao 3.1 o estado do sistema pode oscilar indefinidamente numa vizinhan¸ca qualquer de raioǫ. Um caso particular de estabilidade assint´otica ocorre quando a convergˆencia de um sistema para o ponto de equil´ıbrio ´e limitada por uma fun¸c˜ao exponencial. Defini¸c˜ao 3.3. Estabilidade exponencial: O sistema ˙x=f(t,x) possui estabilidade exponencial se existirem constantesc, k e λ estritamente positivas tal que:
||x(t)|| ≤k||x(t0)||e−λ(t−t0)
,∀||x(t0)||< c (3.3) Perceba que quando t → ∞ o estado do sistema x(t) tende a origem, que ´e o ponto de equil´ıbrio deste sistema.
3.1.1
Teoria de Estabilidade de Lyapunov
No final do s´eculo XIX, o f´ısico e matem´atico russo Aleksandr M. Lyapunov (1857–1918) desenvolveu os alicerces de uma teoria para an´alise de estabilidade que se destaca por n˜ao necessitar da solu¸c˜ao do sistema, utilizando como base conceitos f´ısicos de energia, facilitando bastante o seu entendimento intuitivo.
Em seu trabalho, Lyapunov desenvolveu dois m´etodos de investiga¸c˜ao, o m´etodo indireto, que se baseia na an´alise do sistema linearizado. E o m´etodo direto, que se baseia na existˆencia de fun¸c˜oes com caracter´ısticas espec´ıficas.
equil´ıbrio para a origem, ou seja, ¯x=0. Assim, sempre que mencionarmos a origem estaremos nos referindo ao ponto de equil´ıbrio do sistema.
Conforme mencionado anteriormente, uma das principais caracter´ısticas da te-oria de Lyapunov ´e a sua correla¸c˜ao com a energia f´ısica de um sistema. Para entendermos melhor essa rela¸c˜ao, tomemos como exemplo um sistema linear com-posto por massa, mola e amortecedor sob oscila¸c˜ao livre, dado por:
mx¨+cx˙ +kx= 0 (3.4)
A energia total deste sistema ´e dada pela soma de suas energias cin´etica e po-tencial, sendo uma fun¸c˜ao de sua posi¸c˜ao e velocidade, ou seja:
E(x,x˙) = 1 2(mx˙
2+kx2) (3.5)
cuja derivada temporal ´e dada por: ˙
E(x,x˙) = mx˙x¨+kxx˙ = ˙x(mx¨+kx)
=−cx˙2 (3.6)
Assim, na ausˆencia do amortecedor (c = 0) teremos um comportamento osci-lat´orio, em que a energia total ser´a constante ao longo do tempo, pois ˙E = 0. J´a no caso amortecido ocorrer´a dissipa¸c˜ao de energia que, partindo de um valor inicial positivo, diminuir´a ao longo do tempo, tendendo a zero, pois ˙E ≤0. Percebe-se que, para qualquer estado inicial deste sistema, seu estado tender´a sempre a um compor-tamento estacion´ario, o que corresponde perfeitamente ao exposto na Defini¸c˜ao 3.1, uma vez que dado||x(0)||< δ, sempre teremos ǫ > 0 tal que ||x(t)||< ǫ para todo
t≥0.
A Teoria de Estabilidade de Lyapunov, como ´e conhecida, mostra que al´em da fun¸c˜ao de energia, existem outras fun¸c˜oes que podem ser utilizadas para investigar a estabilidade de um sistema. Para que o sistema seja considerado est´avel, no entanto, tais fun¸c˜oes devem apresentar algumas caracter´ısticas presentes na fun¸c˜ao de energia.
Percebe-se que comom, k >0 e tanto a posi¸c˜ao como a velocidade est˜ao elevadas ao quadrado, a energia ser´a sempre positiva, anulando-se apenas quandox= ˙x= 0, que ´e a origem do plano de fase. Matematicamente, uma fun¸c˜ao que apresenta tais caracter´ısticas ´e dita positiva definida.
Defini¸c˜ao 3.4. Uma fun¸c˜ao positiva definida ´e uma fun¸c˜ao V(x) tal que V(0) = 0
J´a outras fun¸c˜oes, que se anulam em outros pontos al´em da origem, s˜ao definidas como:
Defini¸c˜ao 3.5. Uma fun¸c˜ao positiva semidefinida ´e uma fun¸c˜aoV(x)tal queV(0) = 0 e V(x)≥0 para todo x6= 0.
De forma similar podemos dizer que uma fun¸c˜ao V(x) ´e negativa definida ou
negativa semidefinida se−V(x) ´e positiva definida ou positiva semidefinida, respec-tivamente.
Conforme mencionamos anteriormente, a fun¸c˜ao de energia do sistema massa mola amortecedor possui derivada temporal menor ou igual a zero, sendo considerada uma fun¸c˜aonegativa semidefinida. Com isso, podemos descreve-la como uma fun¸c˜ao positiva definida cuja derivada temporal ´e uma fun¸c˜ao negativa semidefinida. Sendo este o conjunto de caracter´ısticas que nos permite dizer que um sistema ´e est´avel.
Em suma, para que um sistema seja est´avel ´e suficiente que exista uma fun¸c˜ao
V(x) positiva definida tal que sua derivada temporal ˙V(x) seja negativa semidefi-nida. Caso a fun¸c˜aoV(x) satisfa¸ca ambos os requisitos ela recebe o nome defun¸c˜ao de Lyapunov.
No entanto, se ˙V for negativa definida, o sistema ir´a convergir para a origem, ou seja, garante-se sua estabilidade assint´otica. Infelizmente existem casos em que n˜ao conseguimos obter fun¸c˜oes que atendam perfeitamente a esses requisitos, como por exemplo o sistema massa mola amortecedor da Eq. 3.4, cujo comportamento de sua fun¸c˜oesE(x,x˙) e ˙E(x,x˙) pode ser observado na Figura 3.1, onde temos uma fun¸c˜ao positiva definida na Figura 3.1(a), cuja derivada temporal mostrada na Figura 3.1(b) se anula sobre todo o eixox, sendo portanto negativa semidefinida.
-10 -5
0 5
10 ˙
x
-10 -5
0 5
10
x
0 40 80 120
E
(a) Candidata a fun¸c˜ao de Lyapunov
-10 -5
0 5
10 ˙
x
-10 -5
0 5
10
x
-100 -80 -60 -40 -20 0
˙
E
(b) Derivada temporal deE
Para obter tal resultado matematicamente, temos duas alternativas: o teorema da invariˆancia de LaSalle1 que se aplica a sistemas autˆonomos e o lema de Barbalat2
para sistemas n˜ao autˆonomos. O lema de Barbalat ser´a brevemente discutido no Apˆendice A com o intuito de demonstrar a estabilidade da lei adaptativa integral. Entretanto, para uma discuss˜ao detalhada sobre ambos consulte KHALIL (2002).
3.2
Controle por Modos Deslizantes
O controle por modos deslizantes, CMD, nasceu na extinta Uni˜ao Sovi´etica, originando-se com os trabalhos de FILIPPOV (1964) sobre equa¸c˜oes diferenciais com descontinuidades e EMELYANOV e KOSTYLEVA (1964), ITKIS (1976) e UTKIN (1977) sobre controladores com estrutura vari´avel. O sucesso desta estrat´egia de controle se baseia na escolha apropriada da superf´ıcie de deslizamento, que ´e para onde devemos levar o sistema. Uma vez que o sistema convirja para este lugar geom´etrico, suas caracter´ısticas far˜ao com que o erro tenda a zero, deslizando sobre esta superf´ıcie.
Considere um sistema de n-´esima ordem, dado por:
x(n) =f(t,x) +b(t,x)u(t,x) (3.7) tendo como sa´ıda de interesse a vari´avel x. Reescrevendo-o na forma de vari´aveis de estado, chegamos a:
˙
xi =xi+1, para i de 1 at´e n−1 ˙
xn=f(t,x) +b(t,x)u(t,x)
y=x1
(3.8)
Na pr´atica, apesar de f e b serem desconhecidas, frequentemente temos uma no¸c˜ao do comportamento de ambas. Por exemplo, apesar de n˜ao sabermos precisa-mente o valor do coeficiente de amortecimento em determinado sistema, podemos estimar uma faixa de valores onde este se encontra. Assim, podemos supor que o ganho do controladorb se encontra num determinado intervalo entre dois extremos e que a fun¸c˜ao f ´e limitada por uma fun¸c˜ao dex, ou seja:
|fe(t,x)−f(t,x)| ≤F(t,x) 0< bm ≤b(t,x)≤bM
(3.9)
em quefe´e uma estimativa para a fun¸c˜aof,F ´e a fun¸c˜ao delimitadora ebmebM s˜ao
1
Joseph P. LaSalle, matem´atico americano (1916–1983)
2
constantes que representam o ganho m´ınimo e m´aximo, respectivamente. O ganho estimado pode ser dado pela m´edia geom´etrica entre o ganho m´aximo e m´ınimo:
be =
q
bmbM (3.10)
Al´em disso:
0≤β−1
≤ be
b ≤
s bM
bm
(3.11)
Podemos tamb´em definir o erro entre a sa´ıda obtida x1 e a sa´ıda desejada x1,d, como:
e1 =x1−x1,d ou, na forma vetorial:
e=x−xd
Uma das principais caracter´ısticas do controle por modos deslizantes ´e a trans-forma¸c˜ao o problema de rastreamento do vetor de estado variante no tempoxd(t) de ordem n, em um problema mais simples de estabiliza¸c˜ao de primeira ordem. Com isso, em vez de rastrearmos xd devemos estabilizar uma grandeza escalar s num determinado valor (no caso s = 0). Definindo s de maneira adequada poderemos obter o resultado esperado de forma mais simples. Como, por exemplo:
s=
d
dt +λ
n−1
e1 (3.12)
onde λ > 0. Percebe-se que a defini¸c˜ao de s como dada pela Eq. 3.12 assegura um
comportamento dinˆamico est´avel para o erro e1, uma vez que o polinˆomio carac-ter´ıstico resultante ´e um polinˆomio de Hurwitz3, cuja defini¸c˜ao ´e dada por:
Defini¸c˜ao 3.6. Um polinˆomio de Hurwitz possui todos os seus coeficientes reais e positivos e todas as suas ra´ızes tˆem parte real negativa. Ou seja, um polinˆomioP(x)
tal que:
P(x) =anxn+an−1xn −1
+. . .+a1x+a0, com ai >0 para i de 0 at´e n e
P(x) = (x+z1)(x+z2). . .(x+zn−1)(x+zn), com Re(zi)<0 parai de 1 at´en
Igualando a Eq. 3.12 a zero, obtemos uma EDO de ordemn−1 linear homogˆenea, cuja solu¸c˜ao (no caso e1) tende a zero de acordo com a constante λ. Assim, nosso
3
objetivo passa a ser o de manter a quantidade s= 0. Perceba que a Eq. 3.12 pode ser reescrita como: s=cTe, em que:
ci =
(n−1)! (i−1)!(n−i)!λ
n−i
(3.13)
s˜ao coeficientes que fazem de sum polinˆomio de Hurwitz. Por exemplo, escrevendo a Eq. 3.12 para um sistema de segunda ordem,n = 2, obtemos:
s= ˙e1+λe1 = 0 ⇒e2 =−λe1
cujo lugar geom´etrico est´a representado na Figura 3.2 pela linha diagonal tracejada. Supondo as condi¸c˜oes iniciais x(t = 0) iguais aos valores desejados xd, a Eq. 3.12 garante a convergˆencia do erro e1 para zero num intervalo de tempo finito. Nesse caso dizemos que as vari´aveis de estado do sistema deslizam sobresat´e chegar a zero. Por conta disso, o lugar geom´etrico em que s = 0 recebe o nome de superf´ıcie (ou plano) de deslizamento. Por outro lado, caso as condi¸c˜oes iniciais sejam diferentes dos valores de referˆencia, teremos inicialmente uma fase de aproxima¸c˜ao, precedendo a fase de deslizamento. Ambas as fases podem ser vistas na Figura 3.2.
e1 e2
s = 0 −λ
deslizamento
e(t = 0)
aproximação
Figura 3.2: Representa¸c˜ao esquem´atica das fases de aproxima¸c˜ao e deslizamento no plano de fase do erro
Visando dotar a superf´ıcie de deslizamento s com propriedades atrativas, isto ´e, para fazer com que a dinˆamica do erro seja atra´ıda para a superf´ıcie de deslizamento e, ao chegar a este lugar geom´etrico, se mantenha nele devemos utilizar a teoria de estabilidade de Lyapunov, descrita na subse¸c˜ao 3.1.1.
Define-se ent˜ao uma fun¸c˜ao positiva definida, candidata a fun¸c˜ao de Lyapunov:
V(s) = 1 2s
2 (3.14)
cuja derivada temporal seja negativa definida, ou seja:
dV
dt ≤0⇒
1 2
d dts
Para garantir esse ´ultimo quesito, SLOTINE e LI (1991) definiram a condi¸c˜ao de deslizamento, dada por:
1 2
d dts
2 ≤ −η|s| (3.16)
onde η ´e uma constante estritamente positiva. Vale ressaltar que, apesar do nome, a condi¸c˜ao de deslizamento se faz importante durante a fase de aproxima¸c˜ao, pois ela garante que a fase de deslizamento ocorrer´a. Outro fato importante sobre a Eq. 3.16 ´e que ela garante a convergˆencia do erroepara a superf´ıciesnum intervalo de tempo finito. Integrando a Eq. 3.16 entre t = 0 e o instante em que o erro e chega `a superf´ıcie s, ts, temos:
1 2
d dts
2 =sds
dt ≤ −η|s| Z s(t=ts)
s(t=0) s
|s|ds≤ −η
Z ts
0 dt
|s(t=ts)| − |s(t = 0)| ≤ −η(ts−0) Lembrando que s(t=ts) = 0, temos:
ts ≤
|s(t= 0)|
η (3.17)
Observando a Eq. 3.17, podemos perceber que o parˆametro η dita a taxa com a qual o sistema converge para a superf´ıcie de deslizamento, uma vez que quanto maior o valor de η, menor ser´a o tempo para que o erro chegue at´es= 0.
Dando continuidade ao desenvolvimento do controlador por modos deslizantes, sabemos que para mantermos o valor desnulo ´e necess´ario tamb´em que sua varia¸c˜ao em rela¸c˜ao ao tempo tamb´em seja nula. Assim, derivando a Eq. 3.12 em rela¸c˜ao ao tempo, temos:
˙
s = ˙en+qTe ˙
s= ˙xn−x˙n,d+qTe em que:
q1 = 0
qi =ci−1, para i de 2 at´en
Inserindo a Eq. 3.8, temos: ˙
s=f +bu−x˙n,d+qTe (3.18) Como na pr´atica desconhecemos o comportamento exato de f e b, a melhor estimativa poss´ıvelue deu para que tenhamos ˙s= 0 ´e dada por:
ue = 1
be
Para satisfazermos a condi¸c˜ao de deslizamento, dada pela Eq. 3.16, adicionamos um termo descont´ınuo a ue na superf´ıcie de deslizamento e assim:
u=ue−Ksgn(s) (3.20)
em que a fun¸c˜ao sgn(s) ´e chamada de fun¸c˜ao sinal. Seu comportamento, que pode ser observado na Figura 3.3, ´e dado por:
sgn(s) =
+1 , ses >0 0 , se s= 0 −1 , ses <0
(3.21)
s
−1
sgn(s)
1
Figura 3.3: Representa¸c˜ao gr´afica do comportamento da fun¸c˜ao sinal, sgn(s) A importˆancia da utiliza¸c˜ao da fun¸c˜ao sinal para o controle por modos deslizantes reside no fato de que, conforme a Eq. 3.20, o ganhoK atua sobre o sistema apenas enquanto o erro e se encontra fora da superf´ıcie de deslizamento, possuindo papel fundamental na fase de aproxima¸c˜ao. Quando o sistema converge, s = 0, o esfor¸co de controleu se torna igual aue, dado pela Eq. 3.19. Nota-se tamb´em que a parcela da atua¸c˜ao devido a sgn(s) possui sinal oposto ao de s, uma vez que a fun¸c˜ao sinal est´a multiplicada por−1.
Justificada a importˆancia da fun¸c˜ao sgn(s) devemos definir um valor m´ınimo para o ganhoK =K(x) de modo a garantir a condi¸c˜ao de deslizamento dada pela Eq. 3.16. De fato, inserindo as Eqs. 3.20 e 3.19 na condi¸c˜ao de deslizamento, temos:
1 2
d dts
2 =ss˙=sf + b
be
(−fe+ ˙xn,d−qTe)−bKsgn(s)−x˙n,d+qTe
ss˙=s
f − b
be
fe+
b be
−1
( ˙xn,d−qTe)−bKsgn(s)
Sabendo quef =fe+ (f −fe), temos: 1
2
d dts
2 =sf
e+ (f−fe)−
b be
fe+
b be
−1
( ˙xn,d−qTe)−bKsgn(s)
=s
(f−fe) +
b be
−1
( ˙xn,d−qTe−fe)−bKsgn(s)
Da Eq. 3.13 temos que: beue = ˙xn,d−qTe−fe. Assim, lembrando que|f−fe| ≤F e definindo o ganho K como:
K ≥b−1
e β(η+F) +β(β−1)|fe+qTe−x˙n,d| (3.22) conseguimos satisfazer a condi¸c˜ao de deslizamento, dada pela Eq. 3.16, o que asse-gura a natureza atrativa da superf´ıcie de deslizamento s e garante erro e1 nulo em intervalo de tempo finito.
Para avaliar o desempenho obtido por cada um dos controladores utilizados neste trabalho utilizaremos o Erro Quadr´atico M´edio, EQM ou EQM, para quantificar o erro apresentado por cada configura¸c˜ao do controlador.
Na estat´ıstica, mais precisamente no estudo das t´ecnicas de estima¸c˜ao, o erro quadr´atico m´edio representa a m´edia ponderada do quadrado da diferen¸ca entre o valor real e o valor estimado, ou seja, para um processo comp itera¸c˜oes, temos:
EQM =
1
p
p
X
i=1
(x(1i)−x (i) 1,d)2 =
1
p
p
X
i=1
(e(1i))2 (3.23)
no qual o ´ındiceientre parˆenteses indica a itera¸c˜ao. Para mensurar a magnitude do esfor¸co de controle, calcularemos sua norma L2, que, para uma fun¸c˜ao f(t), pode
ser definida como:
kf(t)k2 = v u u u t
tf
Z
0
|f(τ)|2dτ (3.24)
em que tf ´e o tempo final da simula¸c˜ao.
Como tanto o EQM como a norma L2 dependem da frequˆencia de atualiza¸c˜ao
das vari´aveis de estado e do intervalo de simula¸c˜ao, ´e necess´ario que mantenhamos estes valores constantes nos pr´oximos exemplos para que possamos compar´a-los sob as mesmas condi¸c˜oes.
Por isso, decidimos arbitrar o intervalo de simula¸c˜ao de 0 a 80 unidades de tempo, com taxa de atualiza¸c˜ao do estadoxdo sistema a cada 2π×10−3
3.2.1
Aplica¸
c˜
ao com fun¸
c˜
ao sinal
Para ilustrar o funcionamento do controlador por modos deslizantes, podemos aplic´a-lo ao oscilador de Duffing, mostrado na Se¸c˜ao 2.1 e dado pela Eq. 2.5. Com isso, obtemos a equa¸c˜ao para o oscilador de Duffing controlado, dada por:
˙
x1 =x2
˙
x2 =−0,05x2+ 0,2x1−1,19x31+ 6,6 sen(t) +u(t)
(3.25)
Utilizamos novamente o m´etodo de Runge-Kutta de quarta ordem para com-putar a solu¸c˜ao num´erica da Eq. 3.25, com atualiza¸c˜ao das vari´aveis de estado xi a cada 2π ×10−3
unidades de tempo e o dobro disso para o esfor¸co de controle
u(t). O sinal de referˆencia ´e dado pelo estado x1,d da ´orbita gen´erica mostrada na Fig. 3.4(a) e definido pela Eq. 3.26. Admitimos que o sistema parte do repouso, ou seja,x(t = 0) = 0.
x1,d(t) = 2,5 sen(1,843t+ 0,644)−0,5 ˙
x1,d=x2,d(t) = 4,6075 cos(1,843t+ 0,644)
(3.26)
Comparando as Equa¸c˜oes 3.8 e 3.25, conclu´ımos quef(t,x) =−0,05x2+ 0,2x1− 1,19x3
1+6,6 sen(t) e que o ganho do controlador ´eb= 1. Para demonstrar a robustez
do controlador proposto adotaremos uma diferen¸ca fixa σ de +10% sobre o valor nominal do parˆametroa3, de modo que a′
3 =a3(1 +σ) = 1,309.
Para garantirmos o comportamento est´avel do erro e1 no plano de deslizamento da Eq. 3.12, utilizamosλ= 2. Com isso podemos definir a superf´ıcie de deslizamento
s, como:
s= ˙e1+λe1 =e2+ 2e1 (3.27)
eqTe como 2e2.
A diferen¸ca F entre f e fe pode ser calculada como:
F ≥ |fe−f|
=| −a1x2−a2x1−a′
3x31+a4sen(ωt) +a1x2+a2x1+a3x31 −a4sen(ωt)|
=|(a3 −a ′ 3)x31|
Para uma varia¸c˜ao gen´erica σ, onde |σ|<1, temos:
a′
assim:
F ≥ |[a3−a3(1±σ)]x31| =| ±σa3x31|
=|σa3x31|
Como nesta aplica¸c˜ao σ = 0,1 ea3 = 1,19, temos queF ≥0,119|x3
1|. Definindo η igual a 5, podemos expressar o ganhoK da fun¸c˜ao sinal como:
K ≥η+F = 5 + 0,119|x31| (3.28) Com isso, o esfor¸co de controle u(t) para o oscilador de Duffing ser´a definido como:
u= ˙x2,d+ 0,05x2−0,2x1+ 1,19x31−6,6 sen(t)−
−2e2−(5,0 + 0,119|x31|) sgn(s) (3.29) Os resultados obtidos podem ser visualizados na Figura 3.4. Analisando o plano de fase do erro, mostrado na Figura 3.4(c), podemos notar a fase de aproxima¸c˜ao, dada por uma curva que se inicia pr´oximo ao ponto (−1,0; −4,0) e termina pr´oximo ao ponto (−1,0; 2,0), chegando `a fase de deslizamento. Da´ı em diante percebemos que a superf´ıcie de deslizamento n˜ao permanece nula ao longo do tempot, conforme mostrado na Figura 3.4(d), mas apresenta oscila¸c˜oes que, apesar da pequena am-plitude possuem alta frequˆencia. Estas mesmas oscila¸c˜oes podem ser observadas no esfor¸co de controle u(t), mostrado em detalhes na Figura 3.4(f) e na sa´ıda obtida pelo sistema, mostrada na Figura 3.4(b).
Estas oscila¸c˜oes de alta frequˆencia, apresentadas tanto pelo esfor¸co de controle quanto pela superf´ıcie de deslizamento, s˜ao conhecidas na literatura comochattering, que se caracteriza como um fenˆomeno indesejado aos sistemas mecˆanicos, devido n˜ao apenas a extrema atividade do esfor¸co de controle, mas tamb´em pela possibilidade de excitar dinˆamicas n˜ao modeladas (desprezadas durante a modelagem) no sistema. A raiz deste fenˆomeno est´a na descontinuidade da fun¸c˜ao sgn(s) em torno da origem, que provoca varia¸c˜oes bruscas no esfor¸co de controle, se manifestando na superf´ıcie de deslizamento e consequentemente no erro obtido.
Para solucionar este problema, devemos buscar uma forma de suavizar a descon-tinuidade, o que pode ser obtido pela substitui¸c˜ao da fun¸c˜ao sinal por uma fun¸c˜ao de satura¸c˜ao sat(s), dada por:
sat(s) =
sgn(s) , se |s| ≥1