UNIVERSIDADEFEDERALDO RIO GRANDE DO NORTE
PROGRAMA DEPÓS-GRADUAÇÃO EMENGENHARIA
MECATRÔNICA
Controle Ativo de Vibração em Estruturas
Inteligentes Utilizando um Controlador por
Modos Deslizantes com Compensação Difusa
Philippe Eduardo de Medeiros
Orientador: Prof. Dr. Wallace Moreira Bessa
Dissertação de Mestrado apresentada ao
Programa de Pós-Graduação em Engenharia Mecatrônica da UFRN como parte dos requi-sitos para obtenção do título de Mestre em Engenharia Mecatrônica.
UFRN / Biblioteca Central Zila Mamede Catalogação da Publicação na Fonte
Medeiros, Philippe Eduardo de.
Controle ativo de vibração em estruturas inteligentes utilizando um controlador por modos deslizantes com compensação difusa / Philippe Eduardo de Medeiros. - Natal, RN, 2016.
100 f. : il.
Orientador: Prof. Dr. Wallace Moreira Bessa.
Dissertação (Mestrado) - Universidade Federal do Rio Grande do Norte. Centro de Tecnologia. Programa de Pós-Graduação em Engenharia Mecatrônica.
1. Lógica fuzzy - Dissertação. 2. Controle por modos deslizantes - Dissertação. 3. Estruturas inteligentes - Dissertação. 4. Treliça de von Mises - Dissertação. 5. Ligas com memória de forma - Dissertação. I. Bessa, Wallace Moreira. II. Título.
A minha família, principalmente a minha mãe, que apesar das diĄculdades sempre me apoiou e me incentivou em todas as etapas da minha vida.
Agradeço sinceramente ao professor Wallace Moreira Bessa pela orientação e ajuda durante a realização deste trabalho.
Ao professor Marcelo Amorim Savi pela grande ajuda no desenvolvimento de parte deste trabalho.
Aos meus amigos e companheiros de Pós-Graduação (Andouglas Júnior, George Oliveira, João Gutemberg e Tales Câmara) pelo incentivo e apoio durante as disciplinas da pós-graduação e na realização deste trabalho.
Aos companheiros do Laboratório de Manufatura e de Metrologia pelo companhei-rismo.
Ao Programa de Pós Graduação em Engenharia Mecatrônica e a Universidade Federal do Rio Grande do Norte, pela oportunidade de fazer parte desse programa.
A CAPES pelo apoio e suporte Ąnanceiro para a realização deste trabalho.
Estruturas e sistemas inteligentes tem como principal característica a ca-pacidade de emular o comportamento de organismos vivos, os quais possuem com-portamento autorregulado. Deste modo, devido a presença de um mecanismo de estímulo-resposta, este tipo de estrutura possui propriedades adaptativas. O termo estrutura inteligente vem sendo usado para identiĄcar sistemas estruturais capazes de modiĄcar sua geometria e/ou propriedades físicas no intuito de executar deter-minada tarefa. Neste trabalho, um controlador por modos deslizantes com com-pensação difusa é empregado para o controle ativo de vibrações em uma treliça de Von Mises feita de liga com memória de forma. No intuito de facilitar o pro-jeto do controlar, um modelo polinomial é utilizado no desenvolvimento da lei de controle, enquanto uma versão mais soĄsticada, capaz inclusive de descrever o com-portamento histerético do material, é empregada na simulação do comcom-portamento termomecânico dos elementos da estrutura. Este sistema possui uma dinâmica bas-tante rica e complexa, podendo apresentar comportamento caótico mesmo quando submetido a carregamentos de frequências moderadas. Dessa forma, esta abordagem tem como vantagem não somente a obtenção de uma lei de controle mais simples, como também permite que a sua robustez seja evidenciada. Simulações numéricas são apresentadas para comprovar a eĄcácia da estratégia utilizada.
Smart structures and systems have the main purpose to mimic living organ-isms, which are essentially characterized by an autoregulatory behavior. Therefore, this kind of structure has adaptive characteristics with stimulus-response mecha-nisms. The term adaptive structure has been used to identify structural systems that are capable of changing their geometry or physical properties with the purpose of performing a speciĄc task. In this work, a sliding mode controller with fuzzy in-ference is applied for active vibration control in an SMA two-bar truss. In order to obtain a simpler controller, a polynomial model is used in the control law, while a more sophisticated version, which presents close agreement with experimental data, is applied to describe the SMA behavior of the structural elements. This system has a rich dynamic response and can easily reach a chaotic behavior even at moderate loads and frequencies. Therefore, this approach has the advantage of not only ob-taining a simpler control law, but also allows its robustness be evidenced. Numerical simulations are carried out in order to demonstrate the control system performance.
Figura 1 Ű Transformações de fases em LMFs devido a temperatura. . . 24
Figura 2 Ű Representação dos tipos de acomodação da transformação martensítica. 25 Figura 3 Ű Fenômeno da pseudoelasticidade em LMFs. . . 26
Figura 4 Ű Representação esquemático do efeito memória de forma (LAGOUDAS, 2008, adaptado). . . 27
Figura 5 Ű Protótipo de um hidrofólio com atuadores de LMF (REDINIOTIS et al., 2002). . . 28
Figura 6 Ű Ranhura circular de turbina com geometria variável (MABE; CAL-KINS; BUTLER, 2006, adaptado). . . 29
Figura 7 Ű Representação esquemática de um stent (RICE, 2013). . . 31
Figura 8 Ű Utilização de LMFs em garras para simular o comportamento de mús-culos (CHOI et al., 2001). . . 32
Figura 9 Ű Representação esquemática de uma estrutura inteligente (GILEWSKI; SABOUNI-ZAWADZKA, 2015, adaptado). . . 36
Figura 10 Ű Representação esquemática de uma treliça de von Mises. . . 36
Figura 11 Ű Representação do comportamento snap-through. . . 37
Figura 12 Ű Comportamento mecânico da LMF a 373K baseado no modelo mate-mático polinomial e em dados experimentais. . . 40
Figura 13 Ű Diagramas de bifurcação do sistema em função deÒ(SAVI; PACHECO; BRAGA, 2002). . . 41
Figura 14 Ű Respostas caóticas do sistema com pequenas variações nas condições iniciais. . . 42
Figura 15 Ű Representação geométrica do conjunto convexo Þ. . . 44
Figura 16 Ű Comportamento mecânico da LMF à 373 K utilizando o modelo com histerese. . . 47
Figura 17 Ű Diagramas de bifurcação do sistema para Ω e Ò (SAVI; NOGUEIRA, 2010). . . 48
Figura 18 Ű Respostas caóticas do sistema com pequenas variações nas condições iniciais. . . 48
Figura 19 Ű Interpretação gráĄca das equações (4.2) e (4.9) para 𝑛 = 2 (BESSA, 2005). . . 53
Figura 20 Ű Rastreamento da trajetória desejada. . . 56
Figura 21 Ű Representação do erro de rastreamento do sistema. . . 56
(BESSA, 2009). . . 60 Figura 25 Ű Resposta do sistema com controlador por modos deslizantes suavizados. 60 Figura 26 Ű Representação do erro de rastreamento do sistema utilizando o controle
por modos deslizantes suavizados. . . 61 Figura 27 Ű Representação gráĄca dos conjuntos clássico e difuso. . . 63 Figura 28 Ű Funções de pertinência comumente utilizadas na lógica difusa. . . 63 Figura 29 Ű Representação das operações básicas entre dois conjuntos difusos. . . . 65 Figura 30 Ű Diagrama de blocos de um sistema de inferência difuso com
defuzzyfi-cador (TANAKA, 2011). . . 67
Figura 31 Ű Distribuição das funções fuzzy no universo de discurso 𝑥. . . 69
Figura 32 Ű Resposta do sistema com controlador por modos deslizantes suavizados com compensação fuzzy P. . . 73
Figura 33 Ű Representação do erro de rastreamento do sistema utilizando o controle por modos deslizantes suavizados com compensação fuzzy P. . . 73
Figura 34 Ű Resposta do sistema com controlador por modos deslizantes suavizados com compensação fuzzy PD. . . 74 Figura 35 Ű Representação do erro de rastreamento do sistema utilizando o controle
por modos deslizantes suavizados com compensação fuzzy PD. . . 74
Figura 36 Ű Resposta do sistema com controlador por modos deslizantes suavizados com compensação fuzzy S. . . 75
Figura 37 Ű Representação do erro de rastreamento do sistema utilizando o controle por modos deslizantes suavizados com compensação fuzzy S. . . 75
Figura 38 Ű Representação esquemática da treliça de von Mises com o atuador. . . 77 Figura 39 Ű Diagrama de blocos do controlador por modos deslizantes suavizados
com compensação difusa. . . 79 Figura 40 Ű Comportamento mecânico do modelo polinomial ajustado ao modelo
com histerese. . . 81 Figura 41 Ű Resposta do sistema com controlador por modos deslizantes suavizados
com compensação fuzzy P (Ò = 0,01, Ω = 0,3347 e 𝜃= 1,28). . . 83
Figura 42 Ű Representação do erro de rastreamento do sistema utilizando o controle por modos deslizantes suavizados com compensaçãofuzzy P (Ò = 0,01,
Ω = 0,3347 e 𝜃= 1,28). . . 83 Figura 43 Ű Resposta do sistema com controlador por modos deslizantes suavizados
com compensação fuzzy PD (Ò = 0,01, Ω = 0,3347 e 𝜃 = 1,28). . . 84
Figura 44 Ű Representação do erro de rastreamento do sistema utilizando o controle por modos deslizantes suavizados com compensação fuzzy PD (Ò =
com compensação fuzzy S (Ò = 0,01, Ω = 0,3347 e𝜃 = 1,28). . . 86
Figura 46 Ű Representação do erro de rastreamento do sistema utilizando o controle por modos deslizantes suavizados com compensação fuzzy S (Ò = 0,01,
Ω = 0,3347 e 𝜃= 1,28). . . 86
Figura 47 Ű Resposta do sistema com controlador por modos deslizantes suavizados com compensação fuzzy P (Ò = 0,008, Ω = 0,475 e 𝜃= 1,28). . . 87 Figura 48 Ű Representação do erro de rastreamento do sistema utilizando o controle
por modos deslizantes suavizados com compensaçãofuzzyP (Ò = 0,008,
Ω = 0,475 e 𝜃 = 1,28). . . 87
Figura 49 Ű Resposta do sistema com controlador por modos deslizantes suavizados com compensação fuzzy PD (Ò = 0,008, Ω = 0,475 e 𝜃 = 1,28). . . 88
Figura 50 Ű Representação do erro de rastreamento do sistema utilizando o controle por modos deslizantes suavizados com compensação fuzzy PD (Ò =
0,008, Ω = 0,475 e 𝜃= 1,28). . . 88
Figura 51 Ű Resposta do sistema com controlador por modos deslizantes suavizados com compensação fuzzy S (Ò = 0,008, Ω = 0,475 e𝜃 = 1,28). . . 90 Figura 52 Ű Representação do erro de rastreamento do sistema utilizando o controle
por modos deslizantes suavizados com compensaçãofuzzyS (Ò = 0,008,
Tabela 1 Ű Propriedades do material utilizadas na simulação do modelo polinomial. 40 Tabela 2 Ű Propriedades do material utilizadas na simulação do modelo com
his-terese. . . 46
Tabela 3 Ű Base de regras de inferência fuzzy P. . . 71
Tabela 4 Ű Base de regras de inferência fuzzy PD. . . 71
Tabela 5 Ű Base de regras de inferência fuzzy S. . . 71
Tabela 6 Ű Valores adotados na base de regras de inferência fuzzy PD. . . 74
Tabela 7 Ű Propriedades do material utilizadas para o modelo polinomial. . . 81
LMF Liga com memória de forma.
EDO Equações diferenciais ordinárias.
EMA Erro médio absoluto.
EMF Efeito memória de forma.
MEF Método dos elementos Ąnitos.
SMC Sliding mode control - controle por modos deslizantes.
TSK Modelo difuso TakagiŰSugenoŰKang.
sgn Função sinal.
𝑎1, 𝑎2, 𝑎3 Constantes da LMF do modelo matemático polinomial da estrutura.
𝒜 Fase austenita da liga com memória de forma.
𝐴f Temperatura na qual a transformação da fase martensita para a
auste-nita é Ąnalizada.
𝐴s Temperatura na qual se inicia a transformação da fase martensita para
a austenita.
𝐴st Área da seção transversal de cada elemento da estrutura.
𝐵 Projeção horizontal do comprimento de cada barra da treliça de von
Mises.
𝑏 Ganho da ação de controle.
𝑐 CoeĄciente de amortecimento viscoso da estrutura.
𝐸 Módulo de elasticidade.
𝐹 Força de reação em cada elemento da estrutura.
𝐽π Função indicatriz do conjunto convexo Þ.
𝐽χ Função indicatriz do conjunto convexo ä.
𝐾 Ganho do controlador por modos deslizantes.
𝐿 Comprimento de cada elemento da treliça de von Mises.
𝐿0 Comprimento de cada elemento da treliça de von Mises livre de
defor-mação.
¯
𝐿0,𝐿,¯ 𝐿¯A0,𝐿¯A Parâmetros relacionados aos níveis de tensão crítica para as
trans-formações de fases.
ℳ Fase martensita da LMF.
𝑚 Massa da estrutura.
ℳ+ Martensita induzida por cargas mecânicas de tração.
a martensita.
𝑀f Temperatura na qual a transformação da fase austenita para a
marten-sita é Ąnalizada.
𝑃 Carga externa aplicada ao ponto central da estrutura.
𝑃0 Amplitude da carga externa aplicada ao ponto central da estrutura.
𝑠 Superfície de deslizamento.
𝑇 Temperatura nos elementos de LMF.
𝑇0 Temperatura de referência quando 𝜀= 0 na LMF.
𝑇M Temperatura abaixo da qual a martensita é estável.
𝑇A Temperatura acima da qual a austenita é estável.
𝑡 Tempo de simulação.
𝑢 Entrada de controle.
𝑋 Componente vertical do deslocamento do ponto central da estrutura.
𝑥1 Componente vertical adimensional do deslocamento do ponto central
da estrutura.
𝑥2 Componente vertical adimensional da velocidade do ponto central da
estrutura.
˜
𝑥 Erro de rastreamento do estado desejado.
𝑥d Estado desejado.
Ð2, Ð3 Constantes da LMF adimensionais do modelo matemático polinomial
da estrutura.
Ð Parâmetro de deĄnição da dimensão vertical do laço de histerese da
LMF.
¯
Ð Parâmetro de deĄnição da dimensão vertical adimensional do laço de
histerese da LMF.
Ðh Parâmetro de deĄnição da dimensão horizontal do laço de histerese da
treliça de von Mises.
𝜕 Subdiferenciais de funções indicatrizes.
𝜀 Deformação em componentes mecânicos.
𝜀0 Deformação de referência para a deĄnição do conjunto convexoä.
Φ Espessura da camada limite nas vizinhanças da superfície de
desliza-mento.
𝜙 Ângulo formado entre os elementos da estrutura e a linha horizontal
dos apoios.
𝜙0 Ângulo inicial formado entre os elementos da estrutura e a linha
hori-zontal dos apoios.
Ò Amplitude da carga externa adimensional aplicada ao ponto central da
estrutura.
Ù CoeĄciente de expansão térmica da LMF.
¯
Ù CoeĄciente de expansão térmica adimensional LMF.
àΛ, àΛ3 Parâmetros dependentes do tempo que estão associados aos níveis de
tensão para a transformação de fases.
Ú Parâmetro do controlador por modos deslizantes.
Û Função de pertinência de um conjunto difuso.
¯
Ö CoeĄciente de dissipação associado a transformações de fases.
Ö Parâmetro do ganho do controlador por modos deslizantes suavizados.
Ω Frequência adimensional da perturbação externa.
æ Frequência da perturbação externa.
å Relação entre o ganho da ação de controle e o seu valor valor estimado.
𝜌1 Fração de martensita não maclada devido a cargas de tração na LMF.
𝜌2 Fração de martensita não maclada devido a cargas de compressão na
LMF.
𝜌S
1 Valor de 𝜌1 no momento em que a transformação de fase se inicia.
𝜌S
2 Valor de 𝜌2 no momento em que a transformação de fase se inicia.
à Tensão devido a carregamentos mecânicos.
àcrit
M Valor da tensão na qual a partir dela as transformações martensíticas
se iniciam.
às Tensão crítica para o início de transformações martensíticas induzidas
por tensão.
àf Tensão na qual as transformações martensíticas induzidas por tensão
são Ąnalizadas.
á Tempo adimensional de simulação.
𝜃 Temperatura adimensional dos elementos da estrutura.
Ý CoeĄciente de amortecimento viscoso adimensional da estrutura com
modelo polinomial .
¯
Ý CoeĄciente de amortecimento viscoso adimensional da estrutura com
modelo com histerese.
ÕE Módulo de elasticidade adimensional na LMF.
1 Introdução . . . 20
1.1 Desenvolvimento do Trabalho . . . 22
2 Ligas com Memória de Forma . . . 23
2.1 Características das LMFs . . . 23
2.2 Transformações Martensíticas . . . 24
2.2.1 Transformações Martensíticas Induzidas por Temperatura . . . 24
2.2.2 Transformações Martensíticas Induzidas por Tensão . . . 26
2.3 Aplicações das LMFs . . . 28
2.3.1 Aplicações Aeroespaciais . . . 28
2.3.2 Controle de Vibração . . . 29
2.3.3 Aplicações Biomédicas . . . 30
2.3.4 Próteses Robóticas . . . 31
2.4 Modelos Matemáticos de Ligas com Memória de Forma . . . 31
3 Estruturas Inteligentes . . . 35
3.1 DeĄnição . . . 35
3.2 Treliça de von Mises . . . 35
3.3 Modelo Polinomial . . . 38
3.3.1 Simulações Numéricas do Modelo Polinomial . . . 39
3.4 Modelo com Histerese . . . 42
3.4.1 Simulações Numéricas do Modelo com Histerese . . . 46
4 Sistemas de Controle Não Lineares . . . 49
4.1 Importância dos Controladores Não Lineares . . . 49
4.2 Controle por Modos Deslizantes . . . 50
4.3 Controle por Modos Deslizantes Suavizados . . . 57
4.4 Controle por Modos Deslizantes com Compensação Difusa . . . 61
5 Controle de Vibração em Estruturas Inteligentes . . . 77
5.1 Projeto do Controlador . . . 78
5.2 Simulações Numéricas . . . 80
6 Conclusões . . . 92
1 Introdução
Estruturas de materiais inteligentes vêm sendo cada vez mais aplicadas em muitas áreas para controle de forma geométrica, controle de vibração, rigidez, dissipação, entre outros. Para essas aplicações, um maior destaque é dado às ligas com memória de forma (LMFs), que são utilizadas em situações nas quais grandes forças, grandes deformações e baixa frequência de carregamento são necessárias. Para conseguir esses resultados, as estruturas inteligentes são, na maioria das vezes, equipadas com sensores para avaliação da deformação de seus elementos e atuadores para execução de ações de controle.
As LMFs são assim conhecidas devido ao efeito memória de forma (EMF) e de pseudoelasticidade apresentadas por elas. O EMF é o fenômeno no qual o material con-segue recuperar a sua forma, após ter se deformado permanentemente, através de um aquecimento especíĄco. A pseudoelasticidade consiste em o material recuperar toda a deformação imposta sobre ele, acompanhado de um laço de histerese em um ciclo de carregamento-descarregamento. Ambos os fenômenos estão associados às transformações martensíticas que ocorrem nas LMFs devido a ciclos termomecânicos, aos quais elas são submetidas. Essas características as tornam aplicáveis em diversas áreas, conforme discu-tido a seguir (JANI et al., 2014; OTSUKA; REN, 1999).
EspeciĄcamente, as LMFs vêm sendo utilizadas na fabricação de atuadores e micro-manipuladores, na área biomédica, na tecnologia aeroespacial, entre outros. Os atuadores de ligas com memória de forma são relativamente leves, de fabricação simples e têm a capacidade de produzir elevadas cargas de atuação, podendo ser acionados apenas por carregamentos térmicos. Na área biomédica, essas ligas são utilizadas, principalmente, na fabricação de stents, pequenas ferramentas cirúrgicas e implantes (KONH; HONARVAR;
HUTAPEA, 2015; MACHADO; SAVI, 2003). Na tecnologia aeroespacial, as LMFs utili-zadas têm a função de auto ajustar as estruturas e mecanismos de estabilização (CHAU et al., 2006; LOUGHLAN; THOMPSON; SMITH, 2002). Além do mais, elas são utiliza-das na fabricação de micromanipuladores e atuadores robóticos, para simular, através do seu comportamento termomecânico, o movimento suave dos músculos dos seres humanos (PAIVA; SAVI, 2006), e como atuadores para o controle de vibração e Ćambagem em estruturas Ćexíveis.
Uma das principais característica da treliça de von Mises é que, para um dado nível de carregamento, duas conĄgurações de equilíbrio são possíveis. A transição de uma con-Ąguração para outra, caracterizada por um comportamento não linear, conhecido como comportamento snap-through, ocorre quando uma carga mecânica externa crescente é
aplicada sobre ela. O comportamento da treliça se torna ainda mais rico quando o mate-rial que a compõe apresenta um comportamento não linear, como no caso da estrutura do presente trabalho.
O projeto de um controlador por modos deslizantes com compensação difusa for-nece uma aproximação sistemática para problemas nos quais é for-necessário manter a es-tabilidade e performance consistentes na presença de incertezas. Essas incertezas podem apresentar grande inĆuência sobre a resposta do sistema, dessa forma, o sistema de con-trole projetado deve lidar com elas. Logo, isso faz dessa técnica uma escolha adequada para esses casos.
O objetivo do presente trabalho é desenvolver um controlador por modos desli-zantes suavizados com compensação difusa para controlar os níveis de vibração de uma treliça de von Mises de LMF. No intuito de facilitar o projeto do controlador, um modelo polinomial (SAVI; PACHECO; BRAGA, 2002) é utilizado no desenvolvimento da lei de controle, enquanto uma versão mais soĄsticada (SAVI; NOGUEIRA, 2010), capaz inclu-sive de descrever o comportamento histerético do material, é empregada na simulação do comportamento termomecânico dos elementos da estrutura. Tendo em vista que o contro-lador por modos deslizantes requer a utilização de um modelo para estimar a dinâmica da planta a ser controlada, e que o modelo com histerese, dada sua complexidade, não seria o mais adequado, o modelo polinomial será o empregado na elaboração da lei de controle. Esta abordagem tem como vantagem não somente a obtenção de uma lei de controle mais simples, como também permite que a sua robustez seja evidenciada
Neste contexto, o esquema de controle é baseado principalmente na metodologia de controle por modos deslizantes, porém, é reforçada com um sistema de inferência
fuzzy para lidar com imprecisões de modelagem do sistema e perturbações externas. A
adoção de uma lei de controle robusta, como a utilizada no presente trabalho, permite que modelos constitutivos simples, tais como a equação polinomial considerada, possa ser considerada para controlar sistemas com modelos mais complexos. Ao desenvolver a técnica de controle, simulações numéricas são realizadas para comprovar a sua robustez e eĄcácia no controle de estruturas de LMFs mesmo na presença de incertezas no sistema.
1.1
Desenvolvimento do Trabalho
Este trabalho foi dividido em seis capítulos. O Capítulo 1 apresenta a importância deste estudo na comunidade cientíĄca, bem como para futuras aplicações práticas. Nesse capítulo foram introduzidos os primeiros conceitos a respeito das LMFs, da estrutura de von Mises e do controle por modos deslizantes com compensação difusa, já que será a técnica de controle não linear utilizada no presente trabalho, mostrando as suas vantagens face as incertezas do modelo dinâmico do sistema, e por último é descrito o seu objetivo.
O capítulo 2 apresenta as principais características das LMFs, descrevendo os pro-cessos de transformações de fases que estão associadas a elas, tanto devido a temperatura como tensão, e mostrando as suas principais aplicações em diversas áreas. Ao Ąnal do capítulo, é apresentada uma revisão bibliográĄca dos principais modelos já desenvolvidos para simular o comportamento termomecânico das LMFs.
O capítulo 3 trata de estruturas inteligentes, dando enfoque a treliça de von Mises, que, apesar da sua simplicidade, pode fornecer resultados bastante úteis para o estudo de controle em estruturas. São apresentados dois modelos dinâmicos para o comportamento do sistema, um polinomial e outro mais soĄsticado, capaz de descrever o comportamento histerético do material que compõe a estrutura. A diferença entre os dois modelos está na descrição do comportamento termomecânico do material da estrutura. Ao Ąnal de cada descrição do modelo são apresentadas simulações numéricas do comportamento da estrutura em malha aberta utilizando diferentes parâmetros.
O capítulo 4 mostra, inicialmente, a importância dos sistemas de controle não lineares, e em seguida a técnica de controle por modos deslizantes é descrita, tanto pela função sinal como pela função saturação, a qual suaviza o chaveamento da ação de controle quando o sistema atinge a superfície de deslizamento. Por último, o sistema de inferência
fuzzy é apresentado e acrescido à lei de controle. Ao Ąnal de cada descrição, a técnica é
aplicada para controlar um oscilador de Van der Pol, mostrando ser eĄciente mesmo na presença de incertezas no sistema.
No capítulo 5, a técnica de controle por modos deslizantes suavizados com com-pensação difusa é aplicada ao modelo dinâmico com histerese da treliça de von Mises, visando atenuar os seus níveis de vibração, devido a presença de uma perturbação ex-terna. Ao Ąnal do projeto do controlador, são mostradas simulações numéricas do sistema controlado para diferentes condições da estrutura.
2 Ligas com Memória de Forma
Neste capítulo são apresentadas as principais características das LMFs, as trans-formações martensíticas que estão associadas a elas, tanto as induzidas por temperatura como tensão, e as suas principais aplicações em diversas áreas. No Ąnal do capítulo é apresentado uma revisão dos principais modelos termomecânicos já desenvolvidos para simular o comportamento termomecânico das LMFs.
2.1
Características das LMFs
Ligas com memória de forma são ligas metálicas que conseguem recuperar a sua conĄguração original quando submetidas a um processo apropriado de carregamento ter-momecânico. Caso haja alguma restrição para que a liga retorne a sua forma e/ou com-primento inicial, ela é capaz de exercer uma alta força de restituição, o que faz desse tipo de material um próprio atuador.
Mesmo sujeitas a grandes deformações, ligas a base de NiTi, CuZnAl, CuAlNi, AuCd, que são conhecidas como ligas com memória de forma, podem recuperar a sua forma após um carregamento termomecânico. Apesar das ligas a base de CuZnAl, CuAlNi terem um menor custo e obtenção mais fácil, devido as instabilidades apresentadas por elas, as ligas a base de NiTi são as mais utilizadas em muitas aplicações, entretanto, cada uma apresenta uma característica especíĄca, o que pode determinar o tipo de liga empregada (SHAW, 1995). Outra característica importante das LMFs é a sua signiĄcativa capacidade de amortecimento interno, o que faz delas um ótimo candidato para o uso em estruturas inteligentes ou como constituintes em alguns compósitos de tecnologia avançada.
A procura por ligas com memória de forma vem aumentando cada vez mais, já que suas características as fazem materiais bastante úteis em diversas aplicações no ramo da engenharia, aplicações industriais, estruturas e materiais compósitos, no setor aeroes-pacial, robótica, atuadores e produtos da área biomédica (JANI et al., 2014).
Basicamente, as LMFs podem existir em duas fases distintas, martensítica e aus-tenítica, com três tipos de estruturas cristalinas, que são as estruturas da martensita maclada, martensita não maclada e austenita. As transformações de uma fase do mate-rial para outra podem ser monitoradas através da variação das propriedades físicas e/ou mecânicas da liga (PAIVA; SAVI, 2006; YOO et al., 2015).
às suas transformações de fase.
2.2
Transformações Martensíticas
Transformações martensíticas são as mudanças de fase que ocorrem quando a austenita, cuja estrutura cristalina é cúbica de face centrada, se transforma em martensita, cuja estrutura vai depender do tipo de transformação sofrida pelo material. A martensita pode ser induzida na liga através de uma variação de temperatura ou tensão, sendo a martensita maclada a estrutura induzida pela temperatura e a não maclada pela tensão (SHAW, 1995; SUN; HUANG, 2009).
2.2.1
Transformações Martensíticas Induzidas por Temperatura
Para estudar as transformações de fase induzidas pela variação de temperatura, deĄne-se as seguintes variáveis: 𝐴s é a temperatura na qual a transformação da fase
mar-tensita para a austenita tem início (ℳ ⊃ 𝒜),𝐴f é a temperatura na qual a transformação
da martesítica para a austenita é Ąnalizada, 𝑀sé a temperatura na qual a transformação
inversa (𝒜 ⊃ ℳ) tem início e 𝑀f é a temperatura na qual a transformação inversa é
Ąnalizada, como mostra a Ągura (1), através da representação de cada temperatura, em sua respectiva localização, na curva deformação (𝜀) - temperatura (𝑇) de uma LMF.
Figura 1 Ű Transformações de fases em LMFs devido a temperatura.
A partir da Ągura (1) pode-se observar que ao aquecer a liga, que está a uma temperatura na qual a martensita é a fase estável, até 𝐴s, tem início a transformação da
martensita em austenita, que será Ąnalizada quando a temperatura do material atingir
𝐴f. Para a transformação inversa (𝒜 ⊃ ℳ) temos o mesmo raciocínio, ela terá início
quando a temperatura do material atingir 𝑀s e será Ąnalizada quando a temperatura do
material atingir𝑀f. O formato exato do laço de histerese da curva depende da composição
Acima de𝐴f as LMFs apresentam uma curiosidade, a liga só será completamente
austenítica se não houver carregamentos mecânicos aplicados sobre ela, porém, abaixo de
𝑀f o material será completamente martensítico mesmo na presença de cargas
(LAGOU-DAS, 2008).
Enquanto a austenita apresenta uma estrutura cristalina organizada e simétrica e apenas uma variante, a martensita possui uma menor simetria em sua estrutura, o que faz com que ela possa ser formada apresentando diferentes variantes, podendo chegar até a vinte e quatro (OTSUKA; REN, 1999).
As transformações martensíticas ocorrem com uma deformação na rede cristalina, que consiste em pequenos movimentos aleatórios dos átomos para formar a nova estrutura a partir da antiga, seguida por uma acomodação dos átomos. Essa acomodação pode ocorrer de duas formas, por deslizamento, que dará origem a martensita não maclada, ou por macla, que dará origem a martensita maclada. A acomodação por deslizamento é permanente, pois ela ocorre em decorrência de quebra de ligações entre os átomos, já a por macla, pode acomodar mudanças de forma de maneira reversível. Nas LMFs, a macla é o processo predominante de acomodação durante a transformação, porém ainda é possível a coexistência das fases em uma determinada faixa de temperatura (MONTEIRO, 2007). A Ągura (2) mostra a representação esquemática das acomodações por deslizamento e por macla.
(a) Acomodação por macla (b) Acomodação por deslizamento
Figura 2 Ű Representação dos tipos de acomodação da transformação martensítica.
2.2.2
Transformações Martensíticas Induzidas por Tensão
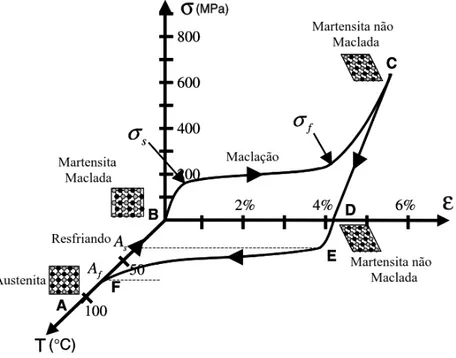
Segundo Shaw (1995) e Ihálcz (2001), as transformações martensíticas induzidas por cargas de tração (ℳ+) ou compressão (ℳ⊗) são as responsáveis pelos efeitos de pseudoelasticidade (ou superelasticidade) e do efeito memória de forma (EMF) em LMFs, os quais as tornam conhecidas como materiais inteligentes em diversas aplicações. A pseu-doelasticidade é observada quando a temperatura nas LMFs está acima da temperatura de transformação total da fase austenítica (𝐴f). Para explicar esse fenômeno, considere o
gráĄco tensão (à) - deformação (𝜀) da Ągura (3) típico de uma LMF a uma temperatura
acima de 𝐴f.
Figura 3 Ű Fenômeno da pseudoelasticidade em LMFs.
Ao aplicar uma carga crescente de tração, a estrutura austenítica vai se distorcendo até chegar nas imediações do ponto 1 da curva à ×𝜀, ponto em que a austenita vai se
tornando instável e a martensita vai sendo induzida pela carga de tração aplicada. A martensita induzida por tensão apresenta uma estrutura não maclada. Entre os pontos 1 e 2 da curva as duas fases coexistem, até que o ponto 2 seja atingido e apenas a fase martensítica estará presente. Quando o material é descarregado, ou seja, quando a magnitude da tensão vai diminuindo até zero, ocorre a transformação inversa (ℳ ⊃ 𝒜), a qual tem início no ponto 3 e término no ponto 4. De forma semelhante a transformação direta, entre os pontos 3 e 4 as duas fases coexistem.
Quando o estado do material atinge o ponto 4, as conĄgurações de deformação e carregamento voltam ao mesmo estágio inicial do momento em que apenas a fase aus-tenítica estava presente, ou seja, apesar da grande deformação sofrida pelo material, ele pôde recuperá-la, o que seria impossível no caso de um material metálico convencional. Esse fenômeno, no qual grandes deformações são recuperadas pelo material acima de𝐴f é
conhecido como pseudoelasticidade ou superelasticidade. A partir do comportamento da curva, é possível concluir que a martensita formada acima de𝐴f será estável somente sob
para a austenita acaba ocorrendo instantaneamente.
Os contornos de macla da estrutura do material são de baixa energia, dessa forma, com a aplicação da carga eles se moverão facilmente, ocasionando um crescimento das variantes de martensita de melhor orientação em relação a tensão aplicada no material. Esse processo de crescimento de uma variante preferencial é conhecida como maclação da martensita (PERKINS, 1981).
Para descrever o efeito memória de forma, considere o comportamento termome-cânico típico de uma LMF de NiTi de um corpo de prova submetido a uma carga axial representado na Ągura (4). Para observar o EMF, o material deve estar submetido, inici-almente, a uma temperatura na qual apenas a fase martensítica esteja presente; enquanto o material estiver livre de tensão, a sua estrutura será a da martensita maclada. Conforme já discutido anteriormente, esse tipo de estrutura pode apresentar diversas variantes, as quais têm diferentes orientações de acordo com o posicionamento dos seus átomos, bem como diferentes orientações preferenciais para que eles se movam na estrutura a partir da aplicação de uma carga mecânica externa.
Figura 4 Ű Representação esquemático do efeito memória de forma (LAGOUDAS, 2008, adaptado).
Com aplicação da carga, o material se deforma elasticamente até que a tensão crítica às seja atingida, momento em que ocorre a reorientação da martensita através
sofre um processo de descarregamento elástico, ou seja, é linear a relação entre a tensão e deformação, e a estrutura de martensita não maclada se conserva, porém, com uma alta deformação permanente, de aproximadamente 4%. Aquecendo o corpo de prova, na au-sência de cargas, a transformação inversa é iniciada quando a temperatura 𝐴s é atingida
e Ąnalizada na temperatura𝐴f (ponto F), momento em que toda a estrutura do material
será austenítica e ele terá eliminado toda deformação permanente, que havia sido obtida no processo de transformação ℳ ⊃ ℳ+. Na ausência de deformação plástica, a forma original do corpo de prova é recuperada.
Um resfriamento subsequente para o ponto B resultará na formação de varian-tes de martensita maclada sem forma alguma associada ao ciclo termomecânico o qual foi submetido o material; mesmo com a repetição desse processo, a forma da liga será recuperada e esse fenômeno é conhecido como efeito memória de forma.
2.3
Aplicações das LMFs
Devido ao efeito memória de forma e a pseudoelasticidade apresentadas pelas LMFs, têm sido desenvolvidas muitas aplicações em diversos campos da ciência e en-genharia utilizando esses materiais. A seguir são descritas algumas delas.
2.3.1
Aplicações Aeroespaciais
Segundo Lagoudas (2008), existem diversos trabalhos no ramo aeroespacial utili-zando LMFs, entre eles se destacam os que envolvem a variação geométrica dos elementos aeroestruturais. Algumas aeronaves utilizam perĄs aerodinâmicos com elementos de LMF, já que devido a capacidade desses materiais mudarem as suas formas devido a carregamen-tos termomecânicos, a geometria das asas pode ser alterada de acordo com a necessidade de operação, como no hidrofólio apresentado na Ągura (5).
Figura 5 Ű Protótipo de um hidrofólio com atuadores de LMF (REDINIOTIS et al., 2002).
barras, os elementos das asas vão se movimentando relativamente para se obter os perĄs aerodinâmicos desejados.
Neste mesmo contexto, pesquisas têm sido desenvolvidas com o intuito de otimizar estruturas aeroespaciais, através da utilização de painéis de LMF agregadas a elas, que têm a função de adequar a rigidez da estrutura via transformações martensíticas. Alguns autores perceberam que a deĆexão da estrutura era reduzida quando se aumentava a quantidade de painéis ou através de pré-cargas aplicadas sobre eles (NAM; CHATTO-PADHYAY; KIM, 2002; TAWFIK; RO; MEI, 2002).
As LMFs também são utilizadas em turbinas de aeronaves para redução de ruídos de gases de exaustão que são liberados por elas. Para que essa redução seja efetivada, são colocadas barras de LMF nas ranhuras circulares das turbinas das aeronaves, como mostra a Ągura (6), que possuem a função de aumentar a passagem dos gases quando a aeronave está a baixas altitudes e baixas velocidades, e diminuí-la a altas altitudes e altas veloci-dades, através do aquecimento e resfriamento das barras, respectivamente. A variação da área de exaustão da turbina é regulada de maneira a promover uma mistura ideal dos gases de acordo com a altitude e velocidade da aeronave, reduzindo, consequentemente, o ruído emitido por eles.
(a) Turbina com ranhura circular (b) Detalhe da ranhura com barras de LMF
Figura 6 Ű Ranhura circular de turbina com geometria variável (MABE; CALKINS; BU-TLER, 2006, adaptado).
2.3.2
Controle de Vibração
outras estruturas da construção civil que são submetidas a terremotos (SAADAT et al., 2002).
O controle passivo de vibração, que tem a Ąnalidade de reduzir a vibração de um sistema primário submetido a uma excitação externa, pode ser realizado através de absorvedores dinâmicos de vibração de LMFs. O absorvedor é constituído de um oscilador secundário que, uma vez conectado ao sistema primário, é capaz de absorver energia de vibração do mesmo (WILLIAMS; CHIU; BERNHARD, 2002).
O que vêm limitando o desenvolvimento de novas aplicações nesse ramo é a ve-locidade de resposta das LMFs. Uma aplicação interessante em sistemas dinâmicos é o oscilador de impacto com elementos de LMFs. Neste dispositivo, a elevada capacidade de dissipação dessas ligas promove um comportamento menos complexo, mudando radical-mente a resposta do sistema quando comparada com aquelas obtidas com suportes elás-ticos lineares (SANTOS; SAVI, 2009; SITNIKOVA; PAVLOVSKAIA; WIERCIGROCH, 2008).
2.3.3
Aplicações Biomédicas
O EMF e a pseudoelasticidade combinadas com a biocompatibilidade que essas ligas apresentam, principalmente devido ao titânio nelas presente, as tornam muito apli-cáveis na área biomédica. Essa combinação tem sido a responsável pelo desenvolvimento de stents, Ąos ortodônticos, pequenas ferramentas cirurgicas, implantes, entre outros.
Dependendo da combinação dos elementos de liga das LMFs e da geometria do componente que as utilizam, elas podem apresentar altos índices de deformação para uma pequena carga aplicada, principalmente se o objeto e/ou componente estiver a uma temperatura acima da qual a austenita é a fase estável, no qual é possível obter o fenômeno da superelasticidade da liga. Logo, em muitos aparelhos ortodônticos têm-se utilizado Ąos de LMF, os quais eliminam a necessidade de repetidos apertos, acelerando o processo corretivo. Os aparelhos com memória de forma proporcionam um maior conforto aos pacientes durante a instalação e também durante o processo corretivo (NACEUR et al., 2014).
consequentemente, dilatando o vaso obstruído (BORN, 2007).
Figura 7 Ű Representação esquemática de um stent (RICE, 2013).
Em relação aos implantes, geralmente as LMFs são utilizadas em dispositivos para aplicações ortopedicas que dão suporte a ossos fraturados. Em uma de suas aplicações, Machado e Savi (2003) mostram um dispositivo que pode ser utilizado para separar vér-tebras, evitando que elas se movimentem, o que contribui para o processo de recuperação da lesão. Mesmo o dispositivo aplicando uma carga constante nas vértebras, ele ainda consegue deixá-las ŞĆexíveisŤ.
2.3.4
Próteses Robóticas
Em próteses robóticas, as LMFs são utilizadas tanto como atuadores para acionar alguns componentes da prótese, devido a simplicidade de fabricação e leveza que esses materiais apresentam, como através de pequenos Ąos para simular o comportamento dos músculos nas próteses que podem substituir algum membro do corpo humano, como bra-ços, pernas e mãos. A Ągura (8) apresenta uma garra robótica com elementos de LMF para simular o comportamento de músculos, através de seu comportamento termomecâ-nico. Cada barra é conectada a duas molas, sendo uma de LMF, usada como atuador, e outra de material elástico, para recuperar a posição de cada barra.
2.4
Modelos Matemáticos de Ligas com Memória de Forma
Figura 8 Ű Utilização de LMFs em garras para simular o comportamento de músculos (CHOI et al., 2001).
Essas abordagens têm sido estudadas por muitos autores, os quais apresentam vários modelos constitutivos para descrever o comportamento termomecânico das LMFs.
Falk (1980) e Müller e Xu (1991) propuseram um modelo baseado em um po-linômio para descrever o comportamento termomecânico de barras de LMF. Apesar de sua simplicidade, o modelo fornece uma boa descrição da resposta dinâmica do sistema, porém não consegue representar a histerese do material, que é uma de suas principais características.
Fremond e Miyazaki (1996) propuseram um modelo tridimensional para a resposta termomecânica de LMFs, considerando que as transformações martensíticas são descritas com a ajuda de duas variáveis internas, que representam as frações volumétricas das duas variantes de martensita não maclada (ℳ+ e ℳ⊗), e devem satisfazer restrições sobre a coexistência de três fases distintas, com a terceira fase sendo a Austenita (𝒜).
Baseado no modelo de Fremond e Miyazaki (1996), outros autores propuseram modelos similares, porém considerando mais variáveis em suas respectivas análises.
Savi et al. (2002) desenvolveram um modelo unidimensional com restrições in-ternas para descrever o comportamento de LMFs. O modelo inclui quatro fases em sua formulação, sendo três variantes de martensita (ℳ, ℳ+ e ℳ⊗) e uma fase autenítica (𝒜). Além do mais, são adotados diferentes parâmetros para cada fase. Expansão térmica e deformações plásticas também são incluídas nessa formulação.
Paiva et al. (2005), baseado nos modelos de Savi et al. (2002) e Baeta-Neves, Savi e Pacheco (2004), acrescentaram uma assimetria nos carregamentos tração-compressão, permitindo uma descrição correta da resposta termomecânica de LMFs. Baseado nesses modelos, Savi e Paiva (2005) estudaram a relação entre os sublaços internos do laço de histerese devido as transformações de fases incompletas relacionadas às respostas termo-mecânicas de LMFs.
A histerese relacionada às LMFs é uma característica essencial e está associ-ada às transformações de fases martensíticas. O laço de histerese é devido ao efeito do atrito que está associado ao movimento relativo das interfaces autenita-martensita e martensita-martensita com diferentes orientações cristalográĄcas. Basicamente, o laço de histerese pode ser observado em curvas tensão-deformação ou deformação-temperatura. Dessa forma, podemos dizer que o laço de histerese maior (ou externo) pode ser deĄ-nido como um envelope de todos os laços de histerese menores (ou internos), conhecidos também como sublaços.
Monteiro et al. (2009) e Oliveira, Savi e Kalamkarov (2010) desenvolveram mo-delos no âmbito da mecânica do contínuo e materiais padrão generalizados, que foram construídos com base em trabalhos anteriores (SAVI et al., 2002; BAETA-NEVES; SAVI; PACHECO, 2004; PAIVA et al., 2005; SAVI; PAIVA, 2005). Sendo que Monteiro et al. (2009) apresentaram um modelo unidimensional enquanto que Oliveira, Savi e Kalamka-rov (2010) apresentaram um modelo tridimensional.
Muitos autores utilizam o método dos elementos Ąnitos (MEF) para descrever o comportamento termomecânico das LMFs.
Masud, Panahandeh e Aurrichio (1997) modelaram a resposta pseudoelástica de LMFs que ocorre sob condições de carregamento-descarregamento a temperaturas cons-tantes. Nesse trabalho, eles consideraram que a temperatura era suĄcientemente alta para que no momento do alívio de carga, o corpo de prova só apresentasse a fase austenita.
Auricchio e Sacco (1999) assumiram deformação e temperatura como variáveis de controle e desenvolveram um modelo termomecânico contínuo no tempo capaz de reproduzir a pseudoelasticidade e o efeito de memória de forma das ligas. O modelo é implementado em uma viga considerando pequenas deformações, que é utilizada para simular testes, bem como aplicações, explorando os fenômenos característicos das LMFs.
Bhattacharyya, Faulkner e Amalraj (2000) estudaram os efeitos das propriedade térmicas e elétricas, em resposta a um ciclo térmico, de Ąos de LMFs. Basicamente, eles consideraram apenas transformações de fase devido à mudança de temperatura, em con-dições de carga nula. O estudo é feito no contexto do problema do valor de contorno, utilizando o método de Galerkin.
ca-paz de representar o EMF, a pseudoelasticidade, a resposta assimétrica tração-compressão e o acoplamento termomecânico das LMFs. Os autores também desenvolveram um algo-ritmo de integração robusto para ser adotado no código do elemento Ąnito para análises de aplicações realísticas. Baseado nessa contribuição, Auricchio e Petrini (2004) estudaram o comportamento de LMFs em materiais compósitos.
La Cava, Savi e Pacheco (2004) aplicaram o MEF para discretizar problemas con-siderando diferentes tipos de barras, enquanto Bandeira et al. (2006) o utilizaram para discretizar problemas de estruturas tipo treliça. Ambos os autores se baseiam no modelo de Paiva et al. (2005).
3 Estruturas Inteligentes
Este capítulo deĄne o conceito de estruturas inteligentes, dando enfoque a treliça de von Mises, que será a estrutura utilizada no estudo de controle de vibrações em estruturas de materiais inteligentes do presente trabalho. Para simular o comportamento do sistema, são utilizados dois modelos, um polinomial sem histerese e um mais soĄsticado no qual a histerese é considerada. Ao Ąnal da descrição de cada um deles serão apresentadas simulações numéricas dos seus respectivos comportamentos em malha aberta.
3.1
DeĄnição
Estruturas inteligentes ainda são um tópico relativamente novo, o qual começou a ser considerado como uma área especíĄca apenas nos anos 80, graças ao avanço da tecnologia dos materiais. No início, as pesquisas eram Ąnanciadas pelo governo, porém no começo dos anos 90, a iniciativa privada também começou a incentivá-las. A partir da colaboração entre pesquisadores, governo e indústria, foram desenvolvidos vários produtos e diversas aplicações para elas (GILEWSKI; SABOUNI-ZAWADZKA, 2015).
Os termos estruturas e sistemas inteligentes têm sido utilizados para identiĄcar sistemas mecânicos que são capazes de mudar suas geometrias ou propriedades físicas com a Ąnalidade de executar alguma tarefa especíĄca. Eles devem ser equipados com sen-sores e atuadores para produzirem tal comportamento, como mostra a Ągura (9). Muitas aplicações em diferentes áreas da ciência e engenharia tem sido desenvolvidas com essa ideia inovadora, aplicando alguns materiais conhecidos como materiais inteligentes. Ligas com memória de forma, materiais piezoelétricos e Ćuidos magneto-reológicos são alguns dos materiais inteligentes largamente utilizados em sistemas estruturais (BESSA; PAULA; SAVI, 2013). Em algumas estruturas, utilizam-se como atuadores os próprios elementos da estrutura, como as que são feitas de LMF. Utilizando esse tipo de material como atuador, é possível obter boas respostas, sem contar que esse tipo de atuador apresenta facilidade de fabricação, é relativamente leve e é capaz de produzir altas cargas de deslocamentos (BANDEIRA et al., 2006).
3.2
Treliça de von Mises
estu-Figura 9 Ű Representação esquemática de uma estrutura inteligente (GILEWSKI; SABOUNI-ZAWADZKA, 2015, adaptado).
Figura 10 Ű Representação esquemática de uma treliça de von Mises.
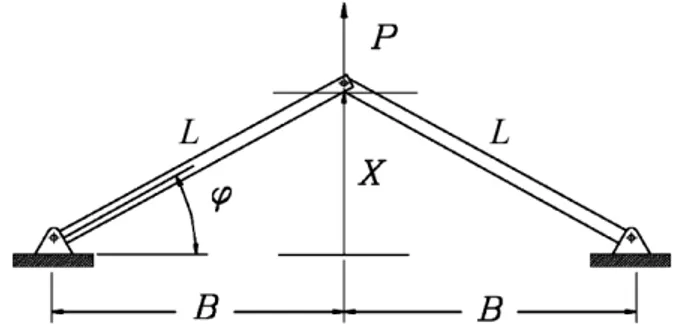
dar as principais características de estabilidade de estruturas tipo treliça mais complexas, bem como outros fenômenos físicos, como por exemplo, a Ćambagem de barras (BAZANT; CEDOLIN, 2010). A Ągura (10) mostra a representação esquemática de uma treliça de von Mises com seus respectivos parâmetros geométricos.
Como podemos observar da Ągura (10), a treliça de von Mises é formada por duas barras idênticas, em um plano 2D, formando um ângulo 𝜙 com a linha horizontal da
superfície dos apoios, e em cada apoio as barras podem sofrer movimentos de rotação em torno dos seus respectivos pinos.
Uma das principais característica da treliça de von Mises é que, para um dado nível de carregamento, duas conĄgurações de movimento são possíveis. Se a estrutura for submetida a uma carga monotonicamente crescente, a conĄguração do deslocamento da junção da estrutura pode mudar de uma conĄguração para outra, apresentando o comportamento snap-through. O comportamento desse sistema é ainda mais rico quando
são consideradas não linearidades no modelo.
Segundo Hrinda (2010), o comportamentosnap-throughocorre quando a estrutura
(a) Representação na treliça (b) Representação gráĄca
Figura 11 Ű Representação do comportamentosnap-through.
uma nova conĄguração. O segundo ponto de equilíbrio é atingido após um grande desloca-mento, de comportamento não linear, do ponto central da estrutura. A Ągura (11) mostra a representação do comportamento snap-through na treliça de von Mises, bem como sua representação gráĄca. GraĄcamente, esse comportamento corresponde a região não linear entre os pontos de equilíbrio 1 e 2 da Ągura (11b).
No presente trabalho, a massa da estrutura (𝑚) será considerada como concentrada
no ponto de junção das duas barras e apenas movimentos verticais e simétricos serão considerados, transformando, dessa forma, um sistema de inĄnitos graus de liberdade em um sistema dinâmico discreto unidimensional. Apesar da simpliĄcação, a resposta apresentada ainda é capaz de exibir comportamentos complexos de grande importância para análise de estruturas. Também serão consideradas não linearidades geométricas e constitutivas no modelo.
Savi, Pacheco e Braga (2002) e Savi e Nogueira (2010) estudaram treliças de von Mises feitas com barras de ligas com memória de forma, as quais apresentavam os efeitos de memória de forma e de pseudoelasticidade, e apresentaram resultados numéricos do comportamento dinâmico desse tipo de estrutura, considerando diferentes modelos, que serão apresentados a seguir, para descrever o comportamento termomecânico do material da estrutura.
Em ambas as análises, as duas barras de LMC tem o mesmo comprimento L, a
mesma área de seção transversal 𝐴st e formam um ângulo 𝜙 com a linha horizontal da
superfície dos apoios, podendo rotacionar livremente, no plano da estrutura, em torno das suas respectivas juntas de apoio. A carga crítica de Euler de ambas as barras é considerada como suĄcientemente alta tal que o fenômeno da Ćambagem não ocorra.
Aplicando a segunda lei de Newton na junção das barras, chega-se à seguinte equação de movimento para a estrutura:
onde F é a força em cada barra, P é uma força externa aplicada verticalmente na junção
das barras, c é o coeĄciente de amortecimento viscoso da estrutura e X representa o
movimento vertical simétrico do seu ponto central.
3.3
Modelo Polinomial
Conforme discutido anteriormente, existem diferentes trabalhos com diferentes mo-delos matemáticos para representar o comportamento termomecânico de LMFs. Savi, Pa-checo e Braga (2002), em seu estudo sobre estrutura de von Mises com LMF, utilizaram o modelo polinomial proposto por Falk (1980). Apesar da simplicidade desse modelo, os autores aĄrmam que ele pode fornecer uma descrição qualitativamente apropriada para a resposta dinâmica do sistema. A sua maior desvantagem é não apresentar a histerese do material, considerando porém um termo de amortecimento viscoso equivalente.
O modelo polinomial é baseado em um polinômio de sexto grau de energia livre, que é função da deformação uniaxial (𝜀) do material. A forma da energia livre é escolhida
de maneira que seus pontos de mínimo e máximo estejam relacionados com a estabilidade e instabilidade de cada fase da LMF, respectivamente. Nos modelos de LMF unidimensio-nais geralmente são consideradas três fases: austenita (𝒜) e duas variantes de martensita (ℳ+ eℳ⊗). Consequentemente, a energia livre é escolhida tal que a elevadas tempera-turas ela tenha apenas um mínimo no estado livre de tensão do material, representando o equilíbrio da fase austenítica. A temperaturas mais baixas a martensita é estável, e a energia livre deve ter dois pontos de mínimo no não desaparecimento da deformação do material. Em temperaturas intermediárias, a energia livre deve ter pontos de equilí-brio correspondentes a ambas as fases. Sob essas restrições, a tensão uniaxial, à, é um
polinômio de quinto grau em função da deformação 𝜀, sendo dado por:
à =𝑎1(𝑇 ⊗𝑇M)𝜀⊗𝑎2𝜀3+𝑎3𝜀5 (3.2)
onde 𝑎1, 𝑎2 e 𝑎3 são constantes do material; T e 𝑇M são as temperaturas nas barras do
sistema e a temperatura abaixo da qual a martensita é estável, respectivamente. Se 𝑇A é
deĄnido como a temperatura acima da qual a austenita é estável, e a energia livre tem apenas um mínimo na deformação nula, logo é possível escrever a seguinte condição:
𝑇A=𝑇M +
1 4
𝑎2 2
𝑎1𝑎3
(3.3)
Portanto, a constante𝑎3 pode ser expressada em termos de outras constantes do
material. Se a seguinte deĄnição de deformação for considerada:
𝜀 = 𝐿 𝐿0 ⊗
1 = cos𝜙0
sendo 𝐿0 e 𝜙0 os valores nominais de 𝐿 e 𝜙, respectivamente, e sabendo que 𝐹 = à𝐴st,
substituindo as equações (3.2) e (3.4) na equação (3.1), Savi, Pacheco e Braga (2002) chegaram a seguinte equação de movimento para o sistema:
𝑚𝑋¨ +𝑐𝑋˙ +2Ast
L0 𝑋
{︂
[𝑎1(𝑇 ⊗𝑇M)⊗3𝑎2+ 5𝑎3]+
+ [⊗𝑎1(𝑇 ⊗𝑇M) +𝑎2⊗𝑎3]𝐿0(𝑋2+𝐵2)
⊗1/2
+ + [3𝑎2⊗10𝑎3]L10(𝑋
2+𝐵2)1/2+
+ [⊗𝑎2+ 10𝑎3]L12 0(𝑋
2+𝐵2)+
⊗5a3
L3 0 (𝑋
2+𝐵2)3/2+ a3
L4 0(𝑋
2+𝐵2)2}︂=𝑃(𝑡)
(3.5)
onde B é a projeção horizontal de cada barra (Ągura(10)). Considerando uma excitação periódica sobre a estrutura, dada por 𝑃(𝑡) = 𝑃0sen(æ𝑡), a equação de movimento (3.5)
pode ser adimensionalizada utilizando as seguintes variáveis adimensionais:
𝑥1 =
𝑋 𝐿0
, Ñ = 𝐵 𝐿0
, 𝜃 = 𝑇 𝑇M
, á =æ0𝑡 , Ω =
æ æ0
e ˙𝑥1 =
𝑑𝑥1
𝑑á (3.6)
Substituindo os parâmetros adimensionais (3.6) na equação (3.5) e dividindo tudo por 2𝐴st𝑎1𝑇M, obtém-se a seguinte equação de movimento adimensional:
˙
𝑥1 =𝑥2
˙
𝑥2 =Òsen(Ωá)⊗Ý𝑥2+𝑥1
{︁
⊗[(𝜃⊗1)⊗3Ð2+ 5Ð3]+
+ [(𝜃⊗1)⊗Ð2 +Ð3](𝑥21+Ñ2)
⊗1/2
⊗[3Ð2⊗10Ð3](𝑥21+Ñ2)1/2+
+ [Ð2⊗10Ð3](𝑥21+Ñ2) + 5Ð3(𝑥12+Ñ2)3/2⊗Ð3(𝑥21 +Ñ2)2
}︁
(3.7)
ondeÝ é um coeĄciente de amortecimento viscoso adimensional. O termo dissipativo
asso-ciado ao efeito de histerese do material pode ser considerado como um termo equivalente a um amortecimento viscoso relacionado a esse parâmetro. Os parâmetros adimensionais da equação (3.7) são deĄnidos da seguinte maneira:
Ò = 𝑃0 𝑚𝐿0æ02
, Ý = 𝑐 𝑚æ0
, æ20 = 2𝐴st𝑎1𝑇M 𝑚𝐿0
, Ð2 =
𝑎2
𝑎1𝑇M
e Ð3 =
𝑎3
𝑎1𝑇M
(3.8)
3.3.1
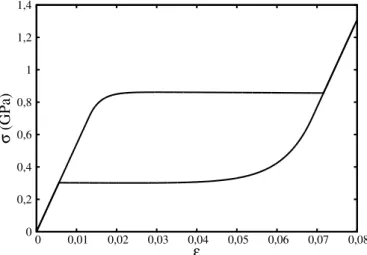
Simulações Numéricas do Modelo Polinomial
Simulações numéricas foram feitas para mostrar o comportamento da estrutura uti-lizando o modelo polinomial. Para resolver o sistema de equações do modelo, foi utilizado o método Runge-Kutta de quarta ordem. Primeiramente, foi simulado o comportamento mecânico do material baseado na equação (3.2) a 373 K, utilizando os parâmetros da tabela (1). A Ągura (12), mostra o comportamento mecânico da LMF baseado no modelo polinomial e em dados experimentais (SITTNER; HARA; TOKUDA, 1995).
Tabela 1 Ű Propriedades do material utilizadas na simulação do modelo polinomial.
𝑎1 (MPa/K) 𝑎2 (MPa) 𝑎3 (MPa) 𝑇M (K) 𝑇A (K)
523,29 1,868×107 2,186×109 288 364,3
0 200 400 600 800 1000 1200
0 0,01 0,02 0,03 0,04 0,05 0,06 0,07 0,08 0,09
σ
(MPa)
ε
Experimental Modelo Matemático
Figura 12 Ű Comportamento mecânico da LMF a 373K baseado no modelo matemático polinomial e em dados experimentais.
anteriormente por Savi, Pacheco e Braga (2002) e alguns resultados são utilizados como referência. Em todas as simulações, foram utilizadas as propriedades da tabela (1). Esses valores são escolhidos de modo a coincidir com os dados experimentais obtidos por Sittner, Hara e Tokuda (1995) para uma liga de Cu-Zn-Al-Ni a 373K. De acordo com a tabela (1), os parâmetros adimensionais da equação (3.7), assumem os seguintes valores: Ð2 =
1,240×102eÐ
3 = 1,450×104. Foi adotado também um valor deÑ = 0,866, que corresponde
a condição inicial de 𝜙0 = 30◇.
Savi, Pacheco e Braga (2002) também estudaram a vibração livre com o modelo polinomial da estrutura e observaram que ela tem vários pontos de equilíbrio e que são dependentes da temperatura. Uma estrutura de von Mises feita com material elástico apresenta três pontos de equilíbrio devido as suas não linearidades geométricas, sendo dois deles estáveis e um instável. No caso de uma estrutura de von Mises com LMF, ela irá apresentar um comportamento diferente. A baixas temperaturas, nas quais a martensita é uma fase estável, existem sete pontos de equilíbrio, quatro deles estáveis e três instáveis. Considerando temperaturas mais elevadas, nas quais as fases martensita e autenita podem coexistir, a estrutura exibe cinco pontos de equilíbrio instáveis e seis estáveis. A elevadas temperaturas, nas quais apenas a fase austenítica estará presente, o sistema irá apresentar um ponto de equilíbrio instável e dois estáveis. A partir dessas informações, podemos perceber que o sistema apresenta um comportamento complexo, ainda mais na presença de uma excitação externa.
(a)θ= 1,30, Ω = 0,1 eξ= 0,01 (b)θ= 0,69, Ω = 0,5 eξ= 0,05
Figura 13 Ű Diagramas de bifurcação do sistema em função de Ò (SAVI; PACHECO;
BRAGA, 2002).
(2002) realizaram simulações a elevadas temperaturas (𝜃 = 1,30), nas quais a fase
aus-tenítica é estável na ausência de carregamentos, e a baixas temperaturas (𝜃 = 0,69), nas
quais a fase martesítica é estável. A Ągura (13) mostra diagramas de bifurcação para Ò, com 𝜃 = 1,30, Ω = 0,1 e Ý = 0,01 e com 𝜃 = 0,69, Ω = 0,5 e Ý = 0,05, respectivamente, para o sistema.
Podemos perceber, a partir da Ągura (13), que o sistema apresenta regiões de comportamento caótico, que podem ser comprovadas pelas nuvens de pontos em algumas faixas de Ò, e regiões de movimentos periódicos, que são representadas por quantidades discretas de pontos nos diagramas de bifurcação. Com alguns valores deÒ, correspondentes as regiões de comportamento caótico, Savi, Pacheco e Braga (2002) plotaram diversos mapas de Poincaré, os quais apresentaram atratores estranhos.
Com valores de Ò que estão associados a comportamentos caóticos na Ągura (13), foram plotados as repostas de 𝑥1 em função de á com pequenas variações nas condições
iniciais, para mostrar que a partir de um certo intervalo de tempo, a resposta do sistema acaba se tornando imprevisível, como mostra a Ągura (14).
O fenômeno do caos está associado a imprevisibilidade da resposta do sistema quando se variam as suas condições iniciais, por menor que sejam essas variações. A partir da Ągura (14) podemos perceber que as respostas do sistema são bastante semelhantes até um determinado instante de tempo, mas começam a divergir a partir de um certo momento, até chegar ao ponto em que as curvas apresentam comportamentos totalmente distintos.
−0,8 −0,6 −0,4 −0,2 0 0,2 0,4 0,6 0,8 1
400 500 600 700 800 900 1000 1100 1200
x1
τ
x1(0) = 0,5 ; x2(0) = 0
x1(0) = 0,5003 ; x2(0) = 0
(a)θ= 1,30, Ω = 0,1,ξ= 0,01 eγ= 0,015
−1,5 −1 −0,5 0 0,5 1 1,5
0 50 100 150 200 250 300 350 400
x1
τ
x1(0) = 0,5 ; x2(0) = 0
x1(0) = 0,5001 ; x2(0) = 0
(b)θ= 0,69, Ω = 0,5,ξ= 0,05 eγ= 0,02
Figura 14 Ű Respostas caóticas do sistema com pequenas variações nas condições iniciais.
independente e imprevisível com o passar do tempo, como observado, principalmente, na Ągura (14b), na qual uma variação de apenas 0,001 na condição inicial, foi o suĄciente para que o comportamento das curvas fossem bastante distintos em um pequeno intervalo de tempo.
3.4
Modelo com Histerese
Savi e Nogueira (2010) propuseram um modelo mais soĄsticado para simular o comportamento termomecânico da LMF na treliça de von Mises, o qual apresenta grande semelhança com respostas experimentais.
Na descrição da força𝐹 da equação (3.1), que está relacionada ao comportamento termomecânico da LMF, é aplicado o modelo com histerese, o qual considera as trans-formações de fase devido aos carregamentos termomecânicos nos elementos da estrutura. O modelo constitutivo utilizado para simular esse comportamento da liga é baseado em vários modelos anteriores (SAVI et al., 2002; BAETA-NEVES; SAVI; PACHECO, 2004; PAIVA et al., 2005; SAVI; PAIVA, 2005; MONTEIRO et al., 2009; OLIVEIRA; SAVI; KALAMKAROV, 2010) que também utilizaram uma metodologia semelhante.
Nesse modelo é considerado a deformação (𝜀), a temperatura (𝑇) e três variáveis de
estado, dadas por 𝜌1,𝜌2 e𝜌3, que estão relacionadas às frações volumétricas associadas à
cada fase da liga, sendo 𝜌1 a fração associada à martensita não maclada devido a tração,
𝜌2 a fração da martensita não maclada devido à compressão e 𝜌3 a fração associada
à austenita. Uma quarta fase (𝜌4) é ainda considerada, que é a fração da martensita
maclada, e pode ser obtida da condição de coexistência das fases, sendo dada por:
𝜌4 = 1⊗(𝜌1+𝜌2+𝜌3) (3.9)
cons-titutivas do comportamento termomecânico da LMF da estrutura podem ser descritas por:
σ=Eε+ [α+Eαh] (ρ2⊗ρ1)⊗κ(T⊗T0) (3.10) ˙
ρ1= 1 ¯
η1
{︀
αε+σΛ+ [2αhα+Eα2h](ρ2⊗ρ1) +αh[Eε⊗κ(T ⊗T0)]⊗∂1Jπ⟨+∂1Jχ (3.11)
˙
ρ2= 1 ¯
η2
{︀
⊗αε+σΛ⊗[2αhα+Eα2h](ρ2⊗ρ1)⊗αh[Eε⊗κ(T ⊗T0)]⊗∂2Jπ⟨+∂2Jχ (3.12)
˙
ρ3 =1 ¯
η3
{︂
0,5(EM ⊗EA)[ε+αh(ρ2⊗ρ1)]2+ (κA⊗κM)(T ⊗T0)[ε+αh(ρ2⊗ρ1)]+ +σΛ3 ⊗∂3Jπ
}︂
+∂3Jχ
(3.13)
onde 𝐸 é o módulo de elasticidade e Ù está associado ao coeĄciente de expansão térmica
da liga, sendo deĄnidos, respectivamente, por:
𝐸 =𝐸M +𝜌3(𝐸A⊗𝐸M) (3.14)
Ù=ÙM +𝜌3(ÙA⊗ÙM) (3.15)
onde os índices Ş𝐴Ť e Ş𝑀Ť, que aparecem em Ù e𝐸, estão associados as fases autenítica
e martesítica, respectivamente.
O parâmetroÐh é utilizado para deĄnir o comprimento horizontal do laço de
his-terese do gráĄco tensão-deformação do material, enquanto Ð ajuda no controle da sua
dimensão vertical. Os parâmetros ¯Öi (𝑖= 1,2,3) estão associados às dissipações
relaciona-das as transformações de fase. Para estudar diferentes características relaciona-das transformações durante o processo de carregamento e descarregamento da LMF, é possível considerar diferentes valores para ¯Öi como ¯ÖiC e ¯ÖiD, para o carregamento e descarregamento,
respec-tivamente. Para mais detalhes dessa consideração, consultar Paiva et al. (2005) e Savi e Paiva (2005).
Os termos𝜕i𝐽π (𝑖= 1,2,3) são subdiferenciais da função indicatriz 𝐽π em relação
a 𝜌i e a função indicatriz 𝐽π = 𝐽π(𝜌1, 𝜌2, 𝜌3) está relacionada ao conjunto convexo Þ,
que fornece as restrições internas relacionadas a coexistência das fases presentes na liga (ROCKAFELLAR, 1970). O conjunto convexo Þ é dado por:
Þ =¶𝜌i ∈R♣0⊘𝜌i ⊘1;𝜌1+𝜌2+𝜌3 ⊘1♢ (3.16)
tal que
𝐽π(𝜌i) =
∏︁ ⨄︁
⋃︁
0 se 𝜌i ∈Þ
∞ se 𝜌i ∈/ Þ
(3.17)
O conjunto convexo Þ pode ser geometricamente interpretado como a região
in-terna, incluindo também a superfície, do tetraedro mostrado no espaço 𝜌1, 𝜌2, 𝜌3 pela