MÉTODOS INTEGRADOS PARA ORGANIZAÇO DE
REDES DE SENSORES SEM FIO COM SORVEDOURO
MÓVEL E CONTROLE DE DENSIDADE
Instituto de Ciênias Exatas
Programa de Pós-Graduação em Ciênia da Computação
MÉTODOS INTEGRADOS PARA ORGANIZAÇO DE
REDES DE SENSORES SEM FIO COM SORVEDOURO
MÓVEL E CONTROLE DE DENSIDADE
Dissertação apresentada ao Curso de
Pós-GraduaçãoemCiêniadaComputaçãoda
Uni-versidadeFederalde MinasGeraisomo
requi-sitoparialparaaobtençãodograu deMestre
emCiênia da Computação.
WAGNER MORO AIOFFI
FOLHA DE APROVAÇO
Métodos integrados para organização de Redes de Sensores sem Fio om
sorvedouro móvel e ontrole de densidade
WAGNER MORO AIOFFI
Dissertação defendidae aprovadapelabana examinadora onstituída por:
Ph. D. Geraldo Robson MateusOrientador
UniversidadeFederal de MinasGerais
Dr.Alexandre Salles da Cunha
UniversidadeFederal de MinasGerais
Ph. D.Antnio Alfredo Loureiro
UniversidadeFederal de MinasGerais
Dr.Luiz Chaimowiz
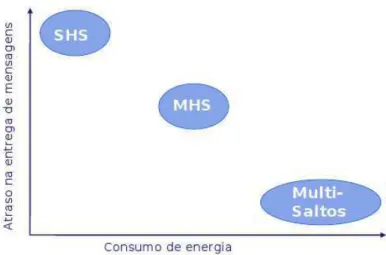
Nessetrabalho apresentamos doisnovosmétodosparaorganizaçãodeRedesdeSensoresSem
Fio(RSSF).Essesmétodosintegramoontrolededensidadeemobilidadedosorvedouropara
otimizar algumasmétriasimportantes dessasredes. Em métodostradiionais, om
omuni-açãomulti-saltos,oproessoderoteamento dedadosé apontadoporalgunsautoresomum
grande onsumidor de energia. Para reduzir esse onsumo, a mobilidade do sorvedouro foi
integrada asRSSFpossibilitandoaoletadedadosutilizandoomuniação um-salto. Porém,
os métodos propostos apresentam um maior atraso na entegra de dados se omparados aos
métodostradiionais. Paratratar esse problema, propomoso método SHS (Single-Hop
Stra-tegy) que estende os métodos propostos na literatura om o objetivo de reduzir o atraso na
entrega. A imposição da restrição deomuniação um-salto obrigaosnóssensores aestarem
noraiodeomuniaçãodosorvedouroparareportarseusdados,oqueimpõeummaioratraso
na entrega dessesdados. Paraaproximar osmétodosomsorvedouro móvel aométodos
tra-diionais om relaçaoao desempenho no atraso na entrega de mensagens, propomos o MHS
(Multi-Hop Strategy). OMHS estende ométodo SHS implementando umesquema de
omu-niaçãomulti-saltosomonúmerodesaltoslimitado. Comisso,reduzimosotempodeoleta
dos dados através de agrupamentos de maior raio. Os dois métodos integram a mobilidade
do sorvedouro om ontrole de densidade, onde o sorvedouroé o responsável pelo ontrole e
implantaçãodas deisões. Os resultados omputaionais mostram umasigniativa melhora
em métriasomo tempo de vida dasRSSFs, obertura e onetividade. Entretanto, na
mé-tria de atraso naentrega de dadososmétodos omsorvedouromóvel sãosigniativamente
menoseientesqueestratégiasmulti-saltos. Porém,osresultadostambémmostramqueom
o ajustedealguns parâmetros omoveloidade dosorvedouro, densidade daredeeo número
InthisworkwepresenttwonewmethodsfororganizationofW irelessSensorNetwork(WSN).
These methods integrate the density ontrol and sink mobility to optimize some important
WSN' metris. In traditional methods, withmulti-hop ommuniation, themessage routing
proess is pointed, by some authors, as the largest energy onsumer. To redue the routing
energy onsume, themobilesinkhasbeen introdued inWSN enabling single-hop
ommuni-ation. However,theproposedmethodswithmobilesinkshowsahighmessagedeliverydelay
ompared to tradiionalmethods. Toonsiderthis problem,weproposetheSHS(Single-hop
strategy) method, thatextends theexistingmethods withtheobjetive ofreduing message
delivery delay. The single-hop ommuniation onstraint imposes sensor nodes to be in the
sink ommuniation range to report its data, what inreases themessage delivery delay. To
approximate the methods with mobile sink to tradiional methods based on delivery delay
performane,weproposetheMHS(Multi-HopStrategy). TheMHSmethodextendstheSHS
implementing amulti-hopommuniationwithalimitednumberofhops. Withthisstrategy,
theMHSreduesthetimeneededtoolletsensornodesdataandthemessagedeliverydelay
byinreasingthelusterrange. Bothmethodsintegratethesinkmobilityanddensityontrol,
where thesinkisresponsibletoontrolandtodeploytothesensornodes. Theomputational
results show a signiant performane inrease in metris suh as WSN lifetime, overage
and onnetivity. Asexpeted, the proposed methods are not as eient as thetradiional
ones, regardingthedelivery delay metri. However,some parameteradjustmentsuhassink
speed, network density and number of mobile sink ould inrease signiantly this metri
Este trabalho é fruto de dois anos de muito trabalho. Durante esse tempo, muitas pessoas
ontribuiram direta ouindiretamenteparaa suarealização. Atodaselas gostaria de prestar
aqui o meuagradeimento.
Queroomeçarporalgumaspessoasquemuitoantesdeeuimaginaresreveresses
agrade-imentos já lutavampelomeusuesso. Aosmeus pais,Luiz e Ida,por empenharem-se tanto
na minhaformação prossionale,prinipalmente, pessoal. Voêssãoexemplodeluta,
perse-verançaeamorinondiional. AosmeusirmãosLuizCláudio, RobsoneWilian,obrigadopelo
ompanheirismo e amizade. Apesar dasnossasmuitas diferenças, a relaçãoentre nósquatro
é eterna,ontem sempreomigo.
Aosmeus amigos deAraruz, que, mesmodepoisde seteanos depouosontatos devido
à distânia físia,ontinuam próximos. Aanidade omvoêsfoiinstântanea, nossoperíodo
de onvivênia juntos nemfoi tãogrande, mas foi suientepara serlembrado parasempre,
obrigado, Saurus, Dudu,Tais,Olga,Letíia, Deborah e Larissa.
Aos meus amigos de BH, responsáveis pela minha (quase) adaptação à essa idade. As
pessoas do Synergia, por proporionarem o melhor ambiente de trabalho que eu já onhei,
obrigado por meajudaremareserprossionalmente. AtodosdoLapo,quemeajudarama
realizar estetrabalho,ousimplesmente estavamlátodososns desemanaparadividirasala
e tornar o trabalho menos tedioso. Ah, lógio que eu não posso esqueer dosbolos, tortas,
salgadinhos, doese tudo quesempreompartilhamosno laboratórioparaquebrararotina.
Finalmente, gostaria de agredeer a pessoal me levou para o mundo da pesquisa. Prof.
Robson, meuorientadorde iniiação iêntia e projetoorientadonagraduação e orientador
deste trabalho, agradeço por ter areditado em mim, por ter sido umorientador presente, e
1 Introdução 1
1.1 Motivação . . . 1
1.2 Objetivos . . . 3
1.3 Contribuições . . . 5
1.4 Organização dadissertação . . . 6
2 Rede de sensores semo 7 2.1 Sensor . . . 9
2.1.1 Componentes . . . 10
2.1.2 Modelodeonsumo de energia . . . 12
2.1.3 Modelo depropagação de sinal . . . 16
2.2 Sorvedouro . . . 17
3.2 Controle de densidade . . . 21
3.3 Protoolos de omuniação . . . 23
3.4 Agrupamento . . . 23
3.5 Problemasde Otimização ombinatória. . . 24
3.5.1 Caixeiro viajante . . . 24
3.5.2 Cobertura de onjuntos . . . 25
3.5.3 p-Centros . . . 27
4 Abordagens 28 4.1 Deniçãodosproblemas . . . 29
4.1.1 Controle de densidade . . . 29
4.1.2 Agrupamento . . . 31
4.1.3 Controle de mobilidade do sorvedouro . . . 34
4.2 Arquiteturasde rede . . . 36
4.2.1 SHS - Redesum-salto . . . 36
4.2.2 MHS- Redes multi-salto . . . 38
4.3 Complexidade dosalgoritmos . . . 42
5.1 Téniade avaliação . . . 44
5.2 Métrias . . . 45
5.3 Parâmetros . . . 46
5.4 Carga detrabalho e denição deenário . . . 47
5.5 Problemasombinatórios. . . 47
6 Resultados omputaionais 49 6.1 Impatoda densidade da rede . . . 52
6.1.1 Atrasona entrega demensagens . . . 52
6.1.2 Tempo de vida darede. . . 54
6.1.3 Taxa demensagens entregues . . . 55
6.1.4 Cobertura . . . 57
6.2 Impatoda veloidade do sorvedouro . . . 59
6.2.1 Atrasona entrega demensagens . . . 60
6.3 Impatodo tamanho daárea demonitoramento . . . 61
6.3.1 Atrasona entrega demensagens . . . 61
6.3.2 Cobertura . . . 62
6.4.2 MHSom maisde umsorvedouro. . . 66
6.5 Outrosresultados . . . 67
6.5.1 Cobertura . . . 67
7 Conlusões 69 7.1 Atraso na entrega de mensagens. . . 71
7.2 Tempo devida da rede . . . 72
7.3 Taxade entregade mensagens. . . 73
7.4 Cobertura . . . 73
7.5 Consideraçõesparaoutros enários . . . 74
7.6 Trabalhosfuturos . . . 75
A Simulador para RSSF 77 A.1 Introdução. . . 77
A.2 Problemasem simulação . . . 78
A.2.1 Deniçãode enário de simulação . . . 78
A.2.2 Ferramentas de simulação . . . 79
A.3 JiST/SWANS . . . 81
A.4.2 Arquitetura . . . 84
A.4.3 Elemento de rede . . . 84
A.4.4 Bateria . . . 87
A.4.5 Rádio . . . 87
A.4.6 Camadade enlae . . . 88
A.4.7 Camadade rede . . . 89
A.4.8 Monitor . . . 89
A.4.9 Módulos utilitários . . . 90
A.4.10 Celular . . . 95
A.4.11 Integração biblioteas externas . . . 96
A.5 Conlusãoe trabalhos futuros . . . 97
1.1 Cenário depesquisa . . . 6
2.1 Primeira geração da linhaMote(RF Mote). . . 9
2.2 Miamote 2. . . 9
2.3 MiaZ. . . 10
2.4 Elementos queompõemumnó sensor. . . 10
2.5 Sorvedouromóvel terrestre- ProjetoCotsBots. . . 18
2.6 Sorvedouromóvel aéreo- Dirigível . . . 18
4.1 Cenário omagrupamento parao SHS.. . . 33
4.2 Cenário omagrupamento parao MHS. . . 34
4.3 Método SHS. . . 37
4.4 Cenário SHS. . . 39
4.5 Método MHS.. . . 40
6.2 Tempode vida darede xNúmerode sensores. . . 54
6.3 Taxa de entrega xNúmero desensores.. . . 55
6.4 Cobertura xNúmero de sensores: 3horas de simulação. . . 57
6.5 Cobertura xNúmero de sensores: 5horas de simulação. . . 58
6.6 Cobertura xNúmero de sensores: 7horas de simulação. . . 58
6.7 Cobertura xNúmero de sensores: 9horas de simulação. . . 59
6.8 Atraso xVeloidadedo sorvedouro. . . 60
6.9 Atraso xTamanhoárea. . . 62
6.10 Cobertura xTempo: 100 metrosde lado . . . 63
6.11 Cobertura xTempo: 200 metrosde lado . . . 63
6.12 Cobertura xTempo: 300 metrosde lado . . . 64
6.13 Atraso xNúmero desensores (SHS) . . . 66
6.14 Atraso xNúmero desensores (MHS).. . . 67
6.15 Cobertura da áreaxTempo . . . 68
A.1 Modelode amadas OSI . . . 82
A.2 Arquitetura doJiST/SWANS . . . 83
2.1 Caraterístias doproessadorAtmelATMega 128L . . . 10
Introdução
1.1 Motivação
A assoiação doavanço emdiversasáreas,prinipalmente miroeletrnia, omuniação sem
o e miro sistemas eletromeânios (MEMS - Miro Eletro-Mehanial Systems) tem
es-timulado enormemente o desenvolvimento dasRedes de Sensores Sem Fio (RSSF). A
res-ente redução do tamanho dos dispositivos que ompõem o sensor, aumento na apaidade
de proessamento, aumento na apaidade de armazenamento de dados e desenvolvimentos
de baterias apazes de forneer uma quantidade ada vez maior de energia para os outros
dispositivos dossensores permitem que as RSSFs se apresentem omo uma solução para
di-versasapliaçõesde monitoração e ontrole, tais omo: monitoração ambiental, monitoração
eontroleindustrial, segurançapúbliaedeambientesemgeral,áreasdedesastresederisos
para vidashumanas, transporte eontrole militar.
AsRSSFs são umnovo tipo de redes semo (MANET - Mobile Ad ho Network). Essas
redes sãoompostaspelos nós sensores 1
. Geralmenteada nó sensoréompostopor:
•
Proessadorom apaidade deproessamento limitada;1
Nesse texto os termos nó sensor e sensor serão utilizados omo sinnimos para designar o elemento
•
Memória ombaixa apaidade de armazenamento de dados;•
Função de sensoriamento para aquisição de dados dos eventos monitorados, taisomo: aústio, sísmio, infravermelho, vídeo-âmera,temperatura epressão;
•
Rádio para omuniação sem o;•
Bateria paraproverenergia aosoutros dispositivos;As RSSFs diferem de redes de omputadores tradiionais em vários aspetos.
Normal-menteessasredes possuemumgrandenúmero denós(Akyildizetal.,2002 ),omautonomia
energétia limitada. Autonomia é o prinipal fator limitante do uso das RSSF já que as
prinipais apliações para elas geralmente projetam um ambiente onde os nós sensores são
distribuídos por áreasde difíil aessoimpossibilitando atroa ou rearga desuabateria.
Asredesadhodiferemdasredestradiionais,ondeaomuniaçãoentreosseuselementos
é feita através de estações rádio base, que onstituem uma infra-estrutura de omuniação.
Por outro lado,em umaad ho osseus elementos omuniam entresi formando redes
multi-saltos (multi-hop) para transmissão dos dados. Organizaionalmente, as RSSFs e MANETs
são idêntias, já que possuem elementos omputaionais que omuniam diretamente entre
si. No entanto, asMANETs têm omo função básia prover suporte à omuniação de seus
elementos omputaionais, que individualmente, podem estar exeutando tarefas distintas,
enquantoasRSSFs tendemaexeutarumaúniafunção deformaolaborativa. Além denas
RSSFs oselementosomputaionais sãoassumidosseremmais limitados.
Além do nó sensor, as RSSF possuem um ou mais sorvedouro. O sorvedouro é um nó
espeial,responsávelporreeberosdadosoletadoseproessadospelaRSSF.Osorvedouroé
o responsávelportransmitir essesdadospara osinteressadosforadaRSSF,funionadoomo
uma ponte(gateway) entrea RSSFeo mundo exterior.
AsRSSFspodemserlassiadasemmóveiseestátiasdependendodaapaidadede
mo-vimentação dosseus elementos. Muitos trabalhosde pesquisa apostam no sorvedouromóvel
Zhao etal. , 2004 ; Jainetal., 2006 ). Nesses trabalhos o sorvedouro pode ter sua mobilidade
ontrolada ounão,enoasodenãoserontrolávelelapodeserdivididaemprevisívelounão
previsível.
Dadas essas partiularidades e reursos limitados, as RSSFs tem estimulado pesquisas
em inúmeras áreas do onheimento omo: projeto de hardware de baixo onsumo de
ener-gia (XBOW , 2006b ), desenvolvimento de algoritmos de roteamento (Rajaraman , 2002),
oti-mização de topologia e roteamento (Cardei etal. , 2002 ; Nakamura et al., 2005b ; Ye etal.,
2002 ; Zhange Hou , 2005 ; Cerpa eEstrin , 2004 ; Zhou e Krishnamahari, 2003). No geral, o
prinipal objetivo daspesquisasnessaárea éo aumento da vida útil daRSSF.
1.2 Objetivos
AspesquisasmaisreentesemRSSFtêm,geralmente, tratadoadaumdosproblemas
enon-trados nessas redes de forma isolada. Reentemente, uma nova área de pesquisa, onheida
omo ross-layer design, está sendo explorada om o intuito de melhorar o desempenho
ge-ral das RSSF em termos de onança, tempo de vida, entre outros (Siqueiraetal., 2006 ).
A idéia básia é romper a divisão de amadas de protoolo de rede promovendo um ganho
de desempenho da rede. Por exemplo, em Siqueira etal. (2006 ) é proposto uma integração
entre ontrole de densidade e roteamento de formaa gerar umarede maiseiente tanto em
onsumo de energia omo emonançana entregadosdados.
Neste trabalho, utilizamos ténias de otimização ombinatória para resolver diferentes
problemas de organização efunionamento dasRSSFde forma integrada,prourandopro
je-tar redes om maior longevidade e bom desempenho em métrias omo taxa de entrega de
mensagens,obertura daredeentreoutras. Para tanto,abordaremososseguintes problemas:
•
Coleta de dados: Esse problema onsiste em enontrar uma forma do nó sensorenviar os dados oletados por ele ao sorvedouro. Consideramos aqui duas formas de
do outro. Na segunda forma, os nós sensores também trabalham omo roteadores de
dados podendo reeber dados de outros nós sensores e entregando-os ao sorvedouro,
entretanto onúmero de enlaesqueumamensagem pode atravessaré limitado.
•
Controle de densidade: Como o número de nós sensores em uma RSSF pode sermuito elevado, oontrole dedensidade torna-se umaspetoimportantenaorganização
dessas redes (Cerpae Estrin, 2004;Ye etal. ,2002 ; Zhang e Hou,2005 ). Em uma rede
muito densa, alguns nós sensores podem trabalhar na mesmaárea, issoé, mais de um
sensorpode estáobrindoa mesmaárea,oasionandoredundânia nosdadosoletados
além de aarretar um tráfego desneessário à rede onseqüentemente aumentando o
onsumo de energia (Tilak etal. , 2002 ). O meanismo de ontrole de densidade deve
utilizar omenor número desensorespossívelnatarefa deoberturada áreasensoriada.
•
Mobilidade do sorvedouro: O ontrole da mobilidade do sorvedouro na oleta dedado dos sensores,para asduas formas, é onsiderado neste trabalho. As duasformas
de oleta de dados podemgerar redes desonexas,onde alguns nóssensores amsem
omuniaçãoomorestodarede,obrigando osorvedouroamovimentar-sesobreaárea
sensoriada para a oleta de dados de todos os nós sensores. Dado que a veloidade
de movimentação do sorvedouro é ordens de magnitude menor que a veloidade de
omuniaçãosemodossensores,aotimizaçãodarotadosorvedouroéfatorimportante
para a minimização do atraso na entrega das mensagens. Além disso, nesse trabalho
onsideramos o asode RSSFs omumou maissorvedouromóvel.
Apesardessesproblemasseremindependentes, neste trabalho ostrataremos emum
ara-bouço integrado, visando prinipalmente o aumento da vida útil das RSSFs e a redução do
atraso na entrega dasmensagens,prinipal problemarelaionado autilização de sorvedouros
móveis(Gandham etal. ,2003 ).
Cabe ressaltar a omplexidade dos problemas e algoritmos tratados. O objetivo deste
trabalho é uma avaliação dosproblemas em RSSFnão sepreoupando om a eiênia dos
apresentadostratamumenárioondeossensorespossuemumataxadegeraçãodemensagens
onstante e igual em ada nó sensor. Além disso, osnós sensores são distribuidos de forma
aleatória,omfunçãodensidadedeprobabilidadeuniforme,portodaaáreadesensoriamento.
1.3 Contribuições
Sãopropostosdoismétodosintegradosparaasoluçãodosproblemastratados: oSHS-
Single-Hop Strategy e o MHS - Multi-Hop Strategy. No primeiro é onsiderado uma RSSF om
estratégia de oleta de dados onde asmensagens sãoentregues ao sorvedouroom umúnio
salto. Osegundoonsidera umaRSSFom estratégiadeoleta de dadosonde asmensagens
são entregues aosorvedouro ommultiplos saltos, porém o número de saltosé limitado.
OSHS otimizaaomáximo oonsumo deenergiada RSSFreduzindo oonsumode dados
omroteamento demensagens. Essemétodoestendeassoluçõesexistentesnaliteraturapara
organizaçãode RSSFomsorvedourosmóveisomoobjetivode reduziroatrasoesperadona
entregade mensagensapresentadoporessesmétodos,mantendoobaixoonsumo deenergia.
O MHS apresenta uma solução intermediária ao SHS e métodos onde as mensagens são
roteadasatravésdossensores,de formaonvenional, dosnóssensores atéosorvedouro(sem
limite). OmétodoMHSestendeoSHS,relaxandoarestriçãodeumúniosaltopossibilitando
o roteamento de mensagens pelos nós sensores, porém o número de saltos que uma
mensa-gem pode atravessar até hegar ao sorvedouro é limitado. O MHS onsidera os objetivos
onitantes entre a otimizaçãodo onsumo deenergia e oatraso na entregadasmensagens.
Oenário tratado é mostradonagura 1.1.
Estetrabalho apresenta asseguintes ontribuições:
•
a integração do ontrole de densidade om a mobilidade do sorvedouro, onde este é o•
roteamento do sorvedouro visando a redução do tempo de ilo de oleta do mesmo,sendo oproblema modeladoomo oProblema doCaixeiro Viajante;
•
umontrole eientedoestadodostrêsdispositivosbásiosdo nósensor(rádio,bateriae função de sensoriamento)aumentandoa eiêniaenergétia da RSSF;
•
além de extensiva avaliaçãoexperimentaldosresultados.Figura 1.1: Cenário depesquisa
1.4 Organização da dissertação
Esse doumento está organizado omo segue. O Capítulo 2 apresenta os fundamentos das
RSSF, seus prinipais problemas, as simpliações e suposições feitas nesse trabalho. O
Capítulo 3apresentaumarevisãobibliográa detalhadade adaumdosproblemas tratados
nesse trabalho, tanto da área de RSSFomo a revisão de todos os modelos e algoritmos de
otimizaçãoombinatóriautilizadosomobaseparaasoluçãodetaisproblemas. NoCapítulo4
são apresentadas as diversas abordagens utilizadas para a solução integrada dos problemas
apresentados, tanto para um ou mais sorvedouros, om redes um-salto e redes multi-saltos.
No Capítulo 5 é apresentada a metodologia de avaliação experimental utilizada paravalidar
e avaliar os métodos propostos. No Capítulo 6 os prinipais resultados omputaionais das
Rede de sensores sem o
As RSSFs são ompostas por um grande número de elementos omputaionais, osnós
sen-sores, dotados deapaidade de monitorar algum tipo de evento físioe reportaratravésde
omuniação semo dadossobre esseseventosa umobservador.
Além disso, nessas redes existe um ou mais elementos omputaionais responsáveis por
oletarosdadosenviadospelosnóssensores edisponibilizá-losparaumobservadorexternoa
RSSF, o nó sorvedouro.
Entre aspossíveis apliaçõesdasRSSFs podemos itar:
•
Apliações militares: As RSSF podem ser utilizadas em operações militares paradiversosns,omo: rastreamento e monitoração detropas inimigas; monitoramento de
áreas para deteção de radioatividade e gases tóxios; ontrole de fronteiras, aptação
de omuniação sem o detropas inimigas, dentreoutras.
•
Monitoração de ambientes: Devido às suas araterístias, omo pequenasdimen-sões,apaidadedeleituradedadosfísioseomuniaçãosemo,osnóssensorespodem
serutilizadosna monitoração deambientes dedifíilpenetraçãohumanaou degrandes
dispositivos de monitoramento. As RSSF podem ser utilizadas por exemplo, para a
eventos físios de uma oresta tropial. Esses dados podem ajudar na preservação de
tais orestas, ajudando no ontrole defoosde inêndioentreoutros.
•
Apliaçõesmédias: Àmedida queosnóssensorestemseutamanhoreduzido, novasapliaçõessetornarãopossíveis,omopor exemploapliaçõesmédias. No futuro,será
possível oloar nós sensores dentro do orpo de um animal ou até mesmo de um ser
humano, permitindo queeles formemumaRSSFquepoderámonitorar vários aspetos
omo níveis de oxigênio, insulinaou olesterol, além dovolumee tamanho dosórgãos.
Para todasasapliações já onheidasde RSSF, uma araterístiase destaa: a
oope-ração entre os nós sensores. As tarefas de uma RSSFsão basiamente exeutadas de forma
ooperativa entre todososnós sensores. Cada sensoré responsável por umaparte da tarefa
prinipal da RSSF, e eventualmente responsável por algumas tarefas administrativas, omo
porexemploroteardadosdeoutrosnóssensoresouserolíderdeumagrupamento denós
sen-sores(luster-head),responsávelpororganizarosnóssensoresdoseuagrupamento ereportar
ao sorvedouroosdados reolhidos pelos nóssensores doagrupamento.
Os nós sensores, prinipaisomponentes da RSSF, são elementos omputaionais de
pe-quenas dimensões, ombaixo poderde proessamento,memória limitadaeomuniação sem
o. Devido às suas dimensões reduzidas, a quantidade de energia que um nó sensor pode
arregar é limitada. A poua quantidade de energia é o prinipal fator limitante do uso de
um nósensor,e a eonomiade energia é oprinipal foode pesquisana áreade RSSF.
AsaraterístiasdasRSSFsomadasàsrestriçõesinerentesaonó sensorabrem inúmeras
possibilidadesdepesquisa,visandoaprimorarténiasde redesadho arealidade dasRSSF.
Aestrutura ea modelagemdoselementosque ompõemasRSSFs,onó sensoreo
sorve-douro, sãodefundamental relevâniapara essetrabalho. Naspróximas seçõesdesreveremos
osprinipaisomponentesdesseselementos,bemomoalgunsmodelosutilizadosparasimular
2.1 Sensor
Nesta seção desreveremoso modelo de sensorutilizado nesse trabalho e os modelos de
on-sumo de energia epropagação de sinaladotados.
Nossomodeloébaseado nalinhadenóssensoresomerialmentedisponíveis,alinha
Mo-tes. AlinhaMotesfoidesenvolvidapor pesquisadoresdaUniversidadedeBerkeley(otsdust ,
2003 ). Atualmente a linha é omerializada pelo fabriante Xbow (XBOW, 2006b ).
Den-tre os modelos disponíveis omerialmente destaam-se os nós sensores Mia2 (Figura 2.2 ),
Mia2DOT e a mais nova geração o MiaZ (Figura 2.3 ). Na Figura 2.1 é mostrado o RF
mote, oprimeiro sensorda linha.
Figura2.1: Primeira geração dalinha Mote(RFMote).
Figura2.2: Miamote 2.
O nó sensor é o prinipal omponente omputaional de uma RSSF. Cada um desses
Figura2.3: MiaZ.
Figura2.4: Elementosque ompõemumnó sensor.
2.1.1 Componentes
2.1.1.1 Proessador
O proessador de um nó sensor apresenta inúmeras restrições quanto a instruções e
prini-palmente quanto a apaidade omputaional. A linha Motes é equipadaom proessadores
AtmelATMega128L ujasaraterístias estãolistadas natabela2.1 . Esseproessador
pos-suiumaarquiteturaRISComumonjuntode133 instruções,amaioriasendoexeutadaem
um únioilode lok.
Freqüênia 4ou 8MHz
Memóriade programa 128 Kbytes
Memóriade dados 512 Kbytes
2.1.1.2 Plaa de sensoriamento
A plaa desensoriamento é responsável pela função demonitoramento donó sensor. Ela éa
responsável por extrair alguma informação do ambiente sobre eventos de interesse. Existem
hoje umagrandevariedade detiposde plaasdesensoriamento queolotamdiferentes dados
omo: temperatura, luminosidade, pressão, níveis de gases no ar, aeleração, magnetismo,
GPS, aústio entre outros.
Um sensorgeralmente possuium tipo espeío de monitoramento, porém algumas
pes-quisas reentes sugerem a utilização de maisde umadessas plaas por sensordando a ada
sensor a possibilidade de monitorar mais de um fenmeno (Dasguptaet al.,2003 ). Existem
nomerado algumasalternativasparamulti-sensoriamento por umúniosensor,porexemplo
a plaade aquisiçãode dadosMICA2DOT Multi-Sensor Module da XBOW(2006b ).
2.1.1.3 Rádio
Orádio dosnóssensores dalinha Motes operam emmúltiplos anais, divididosemfaixasde
freqüênia distintas. O rádio possui apaidade de envio de dados om diferentes potênias
de transmissão,aumentando oudiminuindoo raiode alanedo sinal. Segundo ofabriante,
o rádio dalinha Motespode alançarde 75 a100 metros emumambienteaberto.
2.1.1.4 Bateria
Todos os elementos desritos anteriormente são onsumidores de energia do nó sensor. A
energia paraessesdispositivosé forneida pela bateria. A linha Motesutiliza omofontede
energia duaspilhasdotipoAA.Napróximaseçãoédesritoomodelodeonsumo deenergia
2.1.2 Modelo de onsumo de energia
O nó sensoré um sistemaomplexo de hardware. Paraesse trabalho, oonsumo de energia
dessesistemafoimodeladodeformasimpliadaparaaavaliaçãoexperimental,viasimulação,
de nossaspropostas.
Nesse trabalho onsideramos ino fontes de onsumo de energia entre as tarefas do nó
sensor: transmissão de mensagem, reepção de mensagem, esuta do anal de omuniação,
proessamento, esensoriamento.
Park etal. (2001 ) propõem três modelos de bateriabaseados em seu omportamento de
desarga da energia. Nesse trabalho utilizamos o modelo de bateria om desarregamento
linear, onde a diferença de potenial (medida em Volts) permanee onstante ao longo do
tempo de vida útil da bateria. Esse modelo é uma boa aproximação parao omportamento
de desarregamento debaterias, sualimitaçãoa na onsideração da diferençade potenial
onstante, oque nãoaontee na prátiaemgeral.
A apaidade de umabateria é medida em Ah (Ampere *Hora). Dadoum bateria om
uma apaidade C, e umsistemaom orrente de desarga I, temoso tempode vida útil da
bateria Tdado por:
T
=
C
I
(2.1)Como utilizamos ummodelo de desarga linear, depois de umperíodo de operação
t
d
,aarga restante
R
nabateriaé dado por:R
=
C
t
0
−
Z
t
0
+
t
d
t
0
I
(
t
)
dt
(2.2)Onde
I
(
t
)
é a orrente onsumida no instantet
eC
t
R
=
C
t
0
−
It
d
(2.3)Naspróximassub-seçõesdesreveremosasequaçõesutilizadaspara o álulodoonsumo
de energia do nósensorparaada uma dasfontes deonsumo tratadas nessetrabalho.
2.1.2.1 Transmissão
O proesso de transmissão, em termos de energia, pode ser simpliado em uma tarefa do
sensorde transmitir dadospor umtempo
t
t
(h)aumapotênia espeiadap
(dBm).Aarga onsumidaparatransmissão
(
C
t)
podeser aluladaomo:C
t(
t
t) =
f
t(
p
)
∗
t
t
(2.4)Ondea função
f
t
(
p
)
relaionaa potênia de transmissão omaorrenteneessária, dado uma diferençade potenial xa. Para o Mia2, essa relaçãopode serenontrada naespei-ação doproduto emXBOW (2006a ).
2.1.2.2 Reepção
Oproessodereepção,emtermosdeenergia,émuitopareidoomoproessodetransmissão.
Porém,valelembrarqueparaumaúnia transmissãopodemos tervárias reepções. Uma
mensagem enviada por umnósensoréouvidaportodososnóssensoresqueestiverem dentro
do raio deomuniação donó sensortransmissor.
Considerando a reepção de umamensagem durante o tempo
t
r
(h) em umnó sensor, aC
r(
t
r) =
I
r
∗
t
r
(2.5)Onde
I
r
éa orrente requerida paraareepção dedados emumnósensor.2.1.2.3 Esuta do anal de omuniação
Além dosgastospor transmissão e reepção de dados, o rádio apresenta outra fonte de
on-sumo de energia,a esuta doanal deomuniação.
Orádioneessitaveriarontinuamente oanaldeomuniaçãoparadetetarahegada
de novasmensagens. Paraissoele deve manterligado oseusistemade rádio, a umonsumo
de orrente
I
e
.Podemos determinar aargaonsumida por umnósensorna esutado analpelotempo
t
e
(h)por:C
e
(
t
e
) =
I
e
∗
t
e
(2.6)Consideramos umonsumo de energia nuloquando orádio donó sensorestá desativado.
2.1.2.4 Proessamento
Oproessadorpossuiumonsumo deorrente dadopor
I
p
duranteotempo deseufuniona-mento.
Aarganeessáriaparamantero proessadordonósensorligado duranteumtempo
t
p
éC
p(
t
p
) =
I
p
∗
t
p
(2.7)Consideramos umonsumode energia nuloquando oproessadordo nósensorestá
desa-tivado. Nessetrabalho oproessador estará ativodurantetodo otempoem queorádio oua
plaa de sensoriamento estiverem ativos.
2.1.2.5 Sensoriamento
Por m, a função de sensoriamento também onsome energia na sua tarefa de monitorar o
ambienteparaa apturade valoresreferentesa possíveis eventosfísios observados.
Dado uma orrente
I
s
neessária para realizar o sensoriamento durante um tempot
s
, aarga onsumidaé dada por:
C
s(
t
s) =
I
s
∗
t
s
(2.8)Nesse trabalho, onsideramos que um sensor ativo realiza sensoriamentos a uma taxa
onstantede 1/20 Hz,e ada sensoriamento dura3 s,ou seja,
t
s
= 3
.2.1.2.6 Cálulo do onsumo
Dadasasequações2.4,2.5 ,2.6,2.7e2.8temosoonsumodeenergiadeumnósensordurante
um tempo defunionamento
t
dado por:C
=
C
t(
t
t) +
C
r(
t
r) +
C
e(
t
e) +
C
p(
t
p) +
C
s(
t
s)
(2.9)2.1.3 Modelo de propagação de sinal
OmodeloadotadoparaapropagaçãodosinaldeomuniaçãosemofoioFree-spae (Balanis ,
2005 ; Lin , 1998 ).
Ofree-spae é ummodelode atenuaçãoda potênia dosinalonde osefeitos deabsorção,
difração, obstrução, refração e reexão sãosuientementeremovidos enão têm efeito sobre
a propagação do sinal. Como o nome india, o free-spae assume que tanto o transmissor
quanto o reeptor do sinal está em umambiente livre. Sendo assim, a perda de sinal nesse
modeloé proporional ao quadrado da distânia entre o transmissor e o reeptor e também
proporional ao quadrado dafreqüênia dosinalde rádio transmitido.
Aperdano free-spae é ausadapeladissipaçãodaenergia sobreáreas grandes,
propori-onalà distâniaafonte emissoradosinaleinversamente proporionalàlei dosquadradosda
radiação eletromagnétia.
A equação da perda no free-spae, paraum tamanho de onda
λ
,uma freqüênia depro-pagação de sinal
f
e uma distânia do emissorR
, e sendoc
a veloidade de propagação daluz noambiente onsiderado, é dadapor (Lin ,1998 ):
F S
=
4
πR
λ
2
=
4
πRf
c
2
(2.10)
Uma forma onveniente de expressar em termos de dB, a perda de potênia do sinal de
propagação em função da distânia
d
entre o transmissor e reeptor, é dada pela seguinteequação:
F S
(
d
) = 20 log
10
d
+ 20 log
10
f
+
K
(2.11)2.2 Sorvedouro
Onósorvedouroé umtipoespeialdenó sensor,responsávelpor oletarosdadosdosoutros
nós sensores da rede. Osorvedouro apresenta pratiamente asmesmas araterístias do nó
sensorapresentadasna seção2.1. Nessaseçãoapresentaremos asdiferençasentreo nósensor
e o sorvedouro.
Em modelos de RSSFs atuais, o nó sorvedouro não possui asrestrições de energia do nó
sensor. Eleéonsideradoumdispositivoomapaidade innitadeenergia,elogo, essefator
não é onsiderado nesse trabalho. Isso se deve ao fato de em redes om sorvedouros xos
estarem posiionado na borda do ambiente de sensoriamento eles podem ser inspeionados,
reparados ou substituídos a qualquer momento. Em redes que onsideram os sorvedouros
móveis eles geralmente estão assoiado a um dispositivo om apaidades sostiadas, omo
robos terrestres ou aéreos, e omo aontee no primeiro aso, ossorvedouros podemser
ins-peionados, reparadosou substituídos.
Além disso, onsideramos o sorvedouro omo um dispositivo móvel. Ele possui a
apa-idade de se movimentar em todas as direções. Independente da forma de movimentação,
onsideramos aqui que o sorvedouroé apaz de semovimentar emlinha reta de umponto a
outro de umespaçoplanoa umaveloidadeonstante.
Porém, neste trabalho não tratamos questões inerentes a essa movimentação omo por
exemplo instruções para desvio de obstáulos. Consideramos, sempre, que o aminho entre
dois pontosno espaço éuma linhareta enenhumobstáulo existenesse aminho.
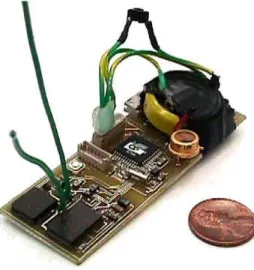
Alguns trabalhos de pesquisa,na área de robótia, ofereem suporteao requisito de
mo-vimentação do sorvedouro. O projeto CotsBots (CotsBots , 2006 ) é um exemplo. Nele, um
nó sensoré aopladoaumveíuloterrestredepequenasdimensõesomomostraagura2.5.
Umaoutrapossibilidade éautilizaçãodeveíulosaéreos,omoporexemplo umdirigível.
Figura2.5: Sorvedouro móvelterrestre- Projeto CotsBots.
Trabalhos relaionados
Nesse apítulo faremos uma revisão bibliográa dos diversos problemas abordados nesse
trabalho, abordando os artigos maisrelevantes e referênias a trabalhos reentes sobre ada
um deles. Aqui tratamos algumas publiações sobre mobilidade, ontrole de densidade e
protoolos de omuniação em RSSF, além dos problemas de otimização ombinatória que
dão baseparanossas soluções.
3.1 Mobilidade em RSSF
Diversostrabalhosvemutilizandodispositivosmóveis,prinipalmentesorvedouromóvel,para
melhorarodesempenhodasRSSF.Geralmenteoobjetivodessesestudoséoaumentodotempo
devida dessasredes(Wang etal. ,2005a ;Jeaetal. ,2005 ;Gandham etal.,2003;Wang etal.,
2005b ; Chakrabarti etal. ,2003 ;Jain etal.,2006 ).
Essestrabalhospodemserlassiadosdeaordoomotipodemobilidade dodispositivo
móvel: ontrolável enão ontrolável; previsível enão previsível.
Umdispositivo móvel pode tersua mobilidade ontrolável ou não,podendo por exemplo
Paraosdispositivosommobilidade não ontroláveis, podemos dividi-losemom
mobili-dade previsívelenãoprevisível. Noexemploanteriorémuitoompliadopreveramobilidade
de um animal em um ambiente livre, mas é fáil prever a mobilidade de um nibus, por
exemplo, apesar de umnibusem umalinha publiade transportenão poder serontrolado
pelaapliação daRSSFpara melhoroletarseus dados.
Em Shahetal. (2003 ); Jainetal. (2006 ); Small eHaas (2003 ); Juang etal. (2002)
ele-mentosmóveis presentes noambiente desensoriamento sãoutilizadosparamovimentaçãodo
sorvedouro, omo animais, arros, entre outros. Esses trabalhos utilizam movimentação não
ontrolável enão previsível.
Utilizando um esquema de movimentação não previsível temos uma impossibilidade de
determinar umlimite máximo para a latênia dasmensagens. Isso porque não podemos
de-terminaroaminhododispositivomóvelassimnãopodemosdeterminarquandoeleentregará
asmensagens parao destinonal.
EmChakrabarti etal.(2003 )dispositivosmóveisnãoontroláveis sãoutilizados, poréma
movimentaçãodessesdispositivospodeserprevista. Umarededesorvedourosmontadossobre
umarededetransportespúblios, omnibusompadrãodemovimentaçãobemdenidos,é
utilizada. Osnóssensores dessarededeterminamosperíodosemquetêmonetividade om
um desses dispositivos móveis e se programam para ativar seus rádios nesses períodos para
reportar seus dados.
Dispositivos móveis ontroláveis são utilizados em alguns trabalhos omo Kansaletal.
(2004 ); Jeaetal. (2005 ) onde robs são utilizados para movimentação do sorvedouro. A
veloidadeé ontrolada paraaumentar a eiêniada RSSF.
Alguns trabalhos utilizam elementos móveis somente para transportar dados de um nó
para outro, em redes onde ada nó tem um pequeno raio de omuniação. Em Zhaoet al.
(2004 ) todos os elementos são móveis, tanto o sorvedouro quanto os nós sensores. Eles se
relay. Ele se posiiona ao lado de um nó sensor para substituir esse nó nas suas tarefas de
roteamento de dadosduranteum ertoperíodo. Assim durante esse períodoo nó sensora
desobrigado de rotear mensagens podendo eonomizar energia. Esse trabalho apresenta um
limiteteórioparaamelhoria dotempo devidadaredeemumfatorde4,omparado auma
RSSF totalmente estátia. Esse aumento é enontrado omo relaymóvela no máximo dois
hopsde distânia do sorvedouroxo.
Muitostrabalhostratamamobilidadedosorvedouro,propondoprotoolosdeomuniação
quedêemsuporteparaamobilidade,maspouaatençãoédadaaoproblemadeplanejamento
de trajetória do sorvedouro. O planejamento de trajetória do sorvedouro móvel é um
pro-blema pouo explorado na literatura. Em Jeaetal. (2005 ) é assumido uma trajetória linear
parao sorvedouromóvel, reduzindo oproblemado planejamento detrajetóriaaoontrole de
veloidadeomaqual osorvedourosemove. TambémemKansaletal.(2004) éapresentado
umnovo esquemadeontroledeveloidade,porémsomenteissoéonsideradonoontrolede
trajetória.
Nessetrabalho, abordaremos o planejamento de trajetóriado sorvedouro utilizando
pro-blemas lássiosde otimizaçãoombinatória.
3.2 Controle de densidade
Em umaRSSFdensa, podemos tervários nóssensorestrabalhando sobre umamesmaregião
emummesmointervalodetempo. Issogeradadosredundantee,prinipalmente,maistráfego
na rede(Cardei etal. ,2002 ).
Meanismos de ontrole de densidade gereniam o estado dos diversos nós da rede
dei-xando somente um pequeno onjunto deles ativos, reduzindo essa redundânia. Diversas
propostas de ontrole de densidade existem na literatura, tanto entralizadas (Cardei etal.,
2002 ; Slijepevie Potkonjak, 2001 ; Nakamura etal. , 2005b ) quanto distribídas (Ye etal.,
Em Slijepevie Potkonjak (2001 ) uma heurístiaentralizada é proposta paradividir o
onjunto de nós sensores em sub-onjuntos mutuamente exlusivos, onde ada sub-onjunto
de nóssensoresobre totalmentea áreadesensoriamento. Oobjetivo émaximizar o número
de sub-onjuntos. Essa estratégia é apaz de aumentar o tempo de vida da RSSF em até
n
vezes,onde
n
éo número de sub-onjuntosemque arede foidividida.Zhange Hou (2005 ) propuseram o algoritmo distribuído OGDC. A idéia básia do
algo-ritmoémanternóstemporariamente inativos,enquantoelesnãosãoneessáriosparagarantir
obertura e onetividade da RSSF. Cadanó sensorsabe suaposição geográa,mas utiliza
somente informaçõesloais paradeidir seestará ativo ou não no próximoperíodo de
funi-onamento darede. OOGDCrequerumrelógioglobal sinronizado parainiiarada período
simultaneamente emtodososnóssensores.
Em Siqueira etal. (2006 ) uma proposta de integração ross-layer entre o algoritmo de
ontrole dedensidade OGDCeoalgoritmoderoteamento EFTREE(Figueiredo et al. ,2004 )
éapresentado. Comoresultadodessaintegraçãoháumganhoonsiderávelnataxadeentrega
de mensagens, já que sensores desativados pelo ontrole de densidade não são onsiderados
para oroteamento, sendoa deisãodo ontrole de densidade e roteamento integrada.
Em Megerian ePotkonjak(2003 );Nakamura et al.(2005b )sãopropostos algunsmodelos
de Programação Linear Inteira (PLI)paraobertura e agendamento de tarefaspararesolver
o problema de obertura em RSSFs. Li etal. (2002 ) propõem umalgoritmo distribuído
uti-lizando um grafo da vizinhança do nó para resolver o problema de obertura omo denido
em Meguerdihianetal. (2001 ).
Nessetrabalho, o problemade ontrole de densidade será modelado omo o problemade
otimização lássiode obertura de onjuntos. Através dessa téniaa obertura ótima será
3.3 Protoolos de omuniação
Nessetrabalho, abordaremos muitopouoosprotoolosde omuniação. Apoiaremos nossas
abordagens em protoolos já existentes, omo protoolos de roteamento de mensagens em
árvores, omo o algoritmo apresentado em Figueiredo etal. (2004 ), e protoolos de amada
de enlae omo o 802.11 e esquemas de transmissão de dados omo o TDM (Time Division
Multiplexing).
A maioria dos trabalhos em RSSF om sorvedouro móvel utiliza omuniação um-salto,
onde osnóssensores omuniam-se somenteom o sorvedouro de forma direta. Porém, essa
restrição impõea redeumalto atraso naentrega dasmensagens.
Algumas propostas reentes utilizam omuniação multi-saltos om sorvedouro móvel,
omo por exemplo o trabalho Gandham etal. (2003 ). A omuniação multi-saltos é a mais
utilizada emRSSFsemmobilidadedosorvedouro. Nessasredes,osnóssensoresdevemrotear
mensagens de outros nós para que essas heguem a seu destino nal. Alguns algoritmos de
roteamento destaam-senesse enário.
A área de algoritmos de roteamento provavelmente é a mais estudada em RSSF. Nesse
ampo temos diversas propostas de roteamento paradiferentes ns. Revisão de publiações
sobre algoritmos deroteamento podemserenontradas emRajaraman(2002 )
3.4 Agrupamento
Em muitas pesquisas, o agrupamento (luster) de nós sensores é posposto para organizar
hierarquiamente a topologia das RSSFs. Essa organização tem levado a uma variedade de
melhorias nasRSSFs (Heinzelmanetal., 2002).
Nossasabordagenspossuemduasestratégiasdeagrupamentodenóssensores. Naprimeira
máximo umnúmero
λ
desaltos, om raizemp
sensores.A primeira abordagem é modelada omo o problema min-size k-lustering
pro-blem (Bilò etal. , 2005), onde é dado um onjunto
S
de sensores edist
(
s
i
, s
j
)
é uma função que determina a distânia entreossensoress
i
es
j
,e o objetivo é onstruir o menornúmerode agrupamentos possível om raio de ada agrupamento limitado por
R
. Essa estratégia ébemsimilaraadotadaemHeinzelman et al.(2002 ),porémnaqueletrabalho aonstruçãodos
agrupamentos é distribuídosem garantiade ótimalidade.
A segunda abordagem é modelada omo o problema inverse
p-Center (Mirhandanie Franis , 1990), onde é dado um onjunto
S
de sensores, e oobjetivoé identiar umnúmeromínimo
p
deraízesde árvores talquetodososnóssensorespodemseomuniar, omumnúmero limitado
λ
de saltos.Aformação de
p
árvores ésimilaraformação daárvoredeoleta dedadosdosalgoritmosde roteamento em árvore omo em Figueiredoetal. (2004 ). Nossa abordagem explora uma
ou mais árvores de oleta, sendo esse enário o preferenial. A existênia de mais de uma
árvorede oleta estáligada ao limite máximo de saltos.
3.5 Problemas de Otimização ombinatória
ParaasoluçãodosproblemasdeRSSFabordadosnessetrabalho,basiamenteutilizaremosa
solução dealgunsproblemasdeotimizaçãoombinatória. Problemas,omoontrolede
densi-dade, planejamento de rotaeagrupamento de nóssensoresserão modelados omoproblemas
lássios eresolvidos atravésalgoritmos apresentados na literatura.
3.5.1 Caixeiro viajante
O Problema do Caixeiro Viajante (PCV) (Traveling Salesman Problem) é um dos mais
tradiionais e onheidos problemas de otimização ombinatória. Dado um onjunto de
i-dades e suas onexões om seus respetivos pesos, o problema onsiste em enontrar o ilo
hamiltoniano (ilo que passe uma únia vez por todas as idades) de menor usto. Mais
formalmente, dado um grafo
G
= (
V, E
)
, ondeV
=
{
1
, ..., n
}
é um onjunto de nós eE
é o onjunto de arestas que ligam esses nós om seus respetivos pesosd
ij
, o problemaon-siste em ahar o menor ilohamiltoniano possível em
G
(Wagner,1969 ; Christodes ,1979 ;Nemhauser e Wolsey, 1988).
Nas déadas de 1930 a 1950 diversos artigos trataram o problema. O mais signiativo
deles(Dantzig etal.,1954 )apresentaasoluçãoparainstâniasdoproblemaomaté49idades
utilizandoumaformulaçãodeProgramaçãoLinearInteiraMista(PLIM).Porémaformulação
apresentadaporeles possuiumnúmeroexponenialderestriçõesemrelação à quantidadede
vérties.
De1950atéosdiasdehoje oPCVontinua sendoextensivamenteestudado. Atualmente
amaiorinstâniauja soluçãoótimaéonheida possui24.978idades,representando um
i-lo sobre pontos da Suéia (Traveling Salesman ProblemHome-Page - PrinetonUniversity ,
2003 ). Nessapágina podemser enontradas informações reentes sobre oTSP,omo
instân-iasdeteste,instâniasreaisomidadesdedeterminadasnaçõesdomundoomo: Alemanha,
Suíça, EstadosUnidoseArgentina. Asoluçãodessasinstânias,informaçõessobrealgoritmos
e soluçõesparao problematambémpodemserenontradas no mesmoendereço eletrnio.
Emnossotrabalho,devidoaoagrupamento dosnóssensores,oproblemade planejamento
de rotas é limitado a pouas idades, sendo possível tratar a solução dessas instânias om
algoritmos exatos, semportanto aarretar umtempode omputaçãoelevado.
3.5.2 Cobertura de onjuntos
obertura entralizado é disponibilizada.
Oproblemadeoberturadeonjuntos(Setoverproblem)onsisteemenontrarum
sub-onjunto de pontosqueubram todo oespaço deobservação. Mais formalmente, o problema
é dendo omo segue: Seja um onjunto
U
de pontos e um onjutoS
de sub-onjuntos deU
, uma obertura mínima é dada por um sub-onjuntoC
⊆
S
talque {S
C
i
,
∀
C
i
∈
C
}
=
U
e|
C
|
=
k
.Asoluçãodoproblemapodeserdadapormeiodeprogramaçãomatemátia,resolvendo-se
o seguintemodelo:
minimizar
X
s
∈
S
y
s
Sujeito a:
X
s
∈
S e d
∈
D
s
x
d
s
≥
1
,
∀
d
∈
D
x
d
s
≤
y
s
,
∀
s
∈
S
∀
d
∈
D
s
x
∈ {
0
,
1
}
y
∈ {
0
,
1
}
onde
S
éoonjunto desensoresec
éoraiodesensoriamento deadasensor. Cadasensorobre umsub-onjunto de pontosde demanda
D
s
=
{
d
∈
D
|
dist
(
d, s
)
≤
c
}
,ondedist
(
d, s
)
é a distânia eulidiana entre oponto de demandad
∈
D
eo sensors
∈
S
.Umavariante do problemade obertura de onjuntos éo problema de obertura de
on-juntosponderado,onde adaelemento possuiumpeso(
w
s
)parasuautilizaçãona obertura.Com isso, o objetivo é minimizar a soma dos pesos ao invés de minimizar o número de
3.5.3 p-Centros
O problema de p-Centros onsiste emloalizar
p
entros em umgrafo de modo a minimizara distânia máxima entre umnóqualquer desse grafoa algum dos
p
entros.Umapliaçãoomumdoproblemade
p
-Centros éaloalizaçãodeunidades deserviçosdeemergênia emredesdetransporte,porexemplo,loalizar
p
batalhõesdoorpodebombeirosemumaomunidaderuraldemaneiraaminimizarotempomáximoderespostadeumdesses
p
batalhõespara todasasfazendas daomunidade.Um problema inverso ao
p
-Centros, o inverse p-Center é utilizado em nossasaborda-gens para a loalização de
p
pontos de parada parao sorvedouro móvel. Diferentemente doproblema de
p
-Centros, onde o objetivo é loalizarp
nós, no p-Centros inverso o objetivo édeterminar e loalizar o menor número
p
de entros queatendam todos osnós de demandado grafoom umadistâniamáxima
λ
.Oproblemade p-Centros invertido é omumente resolvidoporumaredução ao problema
deoberturamínimadeonjuntos, omodesritoemMirhandanie Franis(1990 ). Comisso
Abordagens
Neste apítulodesreveremososproblemastratadoseaformadeintegração entreeles quedá
origem adois métodosparaa organizaçãode RSSFs omontrole de densidade e sorvedouro
móvel, oSHS eo MHS.
O SHS utiliza uma rede um-salto explorando ao máximo a energia disponível nos nós
sensores para a oleta de dados. Já o MHS utiliza umesquema de omuniação multi-saltos
omnúmerode saltoslimitados, explorandoaenergiadisponívelnosnóssensoresparaoleta
de dadose tarefasde roteamento de mensagens.
Nosmétodos propostos aqui, é assumido que ada nó sensorsabe suaposição geográa
e que o sorvedouro onhee a posição de todos osnós sensores. Apesar de não tratarmos o
problema de loalização dos nós sensores, existem diversaspropostas na literatura para tal,
omo Oliveiraetal. (2005); Ye (2006 ). Além disso, o raio de omuniação do sorvedouro e
dosnóssensores sãoxos e nãovariamoma argada bateria.
Naseção4.1deniremos ossub-problemastratadosnessetrabalho. Naseção4.2
4.1 Denição dos problemas
Nesse trabalho, onsideramos os problemas de ontrole de densidade e mobilidade do
sorve-douroemRSSFs. Asoluçãoindividualdeadaumdessesproblemastrazdiferentesbenefíios
para às RSSFs, omo aumento no tempo de vida, menor atraso na entrega de mensagens,
apaidade de operação em redes desonexas, entre outros. Nas próximas sub-seções
deta-lharemos omoada umdessessub-problemasfoiabordadoeassoluçõesadotadasparaada
um.
4.1.1 Controle de densidade
Omeanismodeontrolededensidadegereniaaredundâniadarede,deixandoumonjunto
mínimo de nós sensores em atividade em determinado período de tempo (Ye etal., 2002 ;
Quintãoetal. , 2005 ). Como os sensores não am ativos o tempo todo, o tempo de vida
dos nóssensores é estendido e onseqüentemente o tempo de vida da rede também. Osdois
métodosutilizamo mesmomeanismo deontrole de densidade.
Em nossa abordagem, o ontrole de densidade é feito pelo sorvedouro, de forma
entra-lizada. Assumimos que o sorvedouro sabe a posição de todosos nós sensores, e é apaz de
oletar informações sobre o estado de energia de todos os nós. Com isso o sorvedouro pode
realizar um ontrole de densidade entralizado de forma ótima, onsiderando o estado de
energia de ada nó sensor.
O problema do ontrole de densidade é modelado omo o Problema de Cobertura de
Conjuntos(Garey e Jonhson ,1979 ). Primeiramente a áreade monitoramento é disretizada,
de forma queada ponto representa uma pequena porção dessaárea, formando umonjunto
de pontos
D
quedevemsermonitorados.Seja
S
o onjunto de sensores eC
o raio de sensoriamento de ada sensor. Cada sensorAssoiado a ada sensor temos um usto de ativação
w
s
, que é dado por uma funçãoinversamente proporional à energia de ada sensor
s
∈
S
, priorizando assim sensores ommais energia para ativação. O objetivo é minimizar o usto de ativação dos nós sensores,
sujeitoà restrição de obertura detodosospontos dedemanda.
A saída do problema é um onjunto
Y
, ondey
s
india se o sensors
∈
S
estará ativono próximo período de operação da RSSF. Com a denição aima podemos representar o
problema através do modelo de Programação Matemátia para o problema de obertura de
onjuntos:
minimize z
=
X
s
∈
S
w
s
y
s
(4.1)Sujeito a:
X
s
x
d
s
≥
1
,
∀
d
∈
D
(4.2)x
d
s
≤
y
s
,
∀
s
∈
S
∀
d
∈
D
s
(4.3)x
∈ {
0
,
1
}
(4.4)y
∈ {
0
,
1
}
(4.5)Nomodeloasrestrições4.2garantemaoberturadetodosospontosdedemanda(
d
∈
D
)quepodemseratendidosporpelomenosumnósensor. Asrestrições4.3garantem queseum
nó sensor(
s
∈
S
) for utilizado paraobrir umponto dedemanda (d
∈
D
) entãoy
s
= 1
.Asdeisões de ontrole de densidade são implantadas na rede pelo sorvedouro móvel. O
sorvedouro, emnossaabordagem,éoúnioelemento quetemonetividadeomtodososnós
sensores da RSSF. Porém essa onetividade é ativada ao longo do tempo. No momento em
que o sorvedouroestá loalizado emumagrupamento de nóssensores, todososnóssensores
desseagrupamento temonetividadeomosorvedouro, ereebemasdeisõesdeontrolede
sorvedouro toma as deisões de ontrole de densidade e as implementa em ada sensor à
medida queperorretodososagrupamentos. Quando osorvedouro requisita osdadosdo nó
sensor, eleo avisa searáativo apósreportar seus dados.
Essaimplantaçãodasdeisõesdeontrolededensidadepodemlevarafalhasmomentâneas
na obertura da área monitorada. Por exemplo, onsidere que o sensor
s
1
é desativado notempo
t
1
e o sensors
2
é ativado no tempot
2
> t
1
eD
s
1
=
D
s
2
. Assim, o sub-onjunto de pontosde demandaD
1
⊆
D
s
1
que não é sensoriado por outro sensorativo ará desobertodurante ointervalode tempo
[
t
1
, t
2
]
.Quandoumsensorédesativadopeloontrolededensidade,asuafunçãodesensoriamento
é desativada. O proessador estará ativo sempre que a função de sensoriamento ou o rádio
estiverem ativos. O rádio dos nós sensores é ativado somente quando o sorvedouro está no
agrupamentoqueessesensorseenontra. Issopodeserfeitoatravésdemétodosquedeixamo
rádioembaixaenergiaatéreeberumestímuloexternoparaativaroseurádio(Polastre etal.,
2004 ; Correia etal.,2005).
4.1.2 Agrupamento
Os dois métodos propostos possuem requisitos para agrupamento dos nós sensores para
fa-ilitar a oleta de dados pelo sorvedouro móvel. Tanto em um quanto em outro método é
desejável que a área de monitoramento seja oberta por um onjunto mínimo de
agrupa-mentos, o que reduziria a quantidade de pontos de oleta para o sorvedouro possivelmente
reduzindo o tamanho desuas rotas.
4.1.2.1 SHS - Redes single-hop
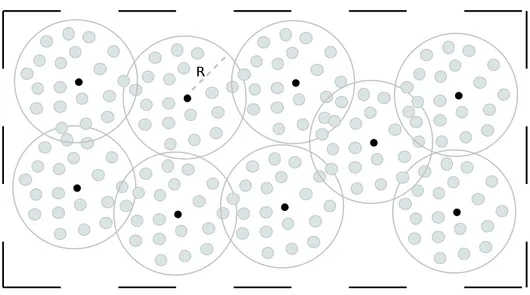
No SHS,osnóssensoresdevem seragrupadosemagrupamentosomraiomáximo
R
,andoosnóssensores geograamente próximosnomesmoagrupamento. Nessemétodoo problema
de agrupamento foi modelado omo o problema min-size k-lustering problem (Bilò et al.,
distânia entre ossensores
s
i
es
j
. O objetivo é onstruir o menor número de agrupamentospossível,onde o raiode ada agrupamento é limitadopor
R
.Para onstruir tais agrupamentos utilizamosum algoritmo baseado no método da árvore
geradora mínima (Minimumspanning tree method),queéumaténiadeagrupamento
aglo-merativa hierárquia (Jain , 1991 ). Dadoum onjunto
S
de nós sensores,o algoritmo gulosoomeça onstruindo
|
S
|
agrupamentos entrados emada umdosnóssensores emS
.Iterativamente, osagrupamentos mais próximos
c
i
ec
j
são unidos em umúnioagrupa-mento
c
r
see somente seraio
(
c
r)
≤
R
,onderaio
(
.
)
india o raio do agrupamento indiado. O proesso iterativo é interrompido quando nenhum agrupamentoc
i
ec
j
pode serunido. Oproedimento émostrado no Algoritmo4.1.
Algoritmo 4.1: ClusterizaçãoSHS(Nós sensores
S
)CLUTERS=S; 1
repeat 2
Calula oentrodo
i
-ésimoluster,∀
i
∈
CLU ST ERS
; 3Calula amatrix de distâniaentre oslusters
M
; 4Enontrao menorelemento nãonulo
(
c
i
, c
j
)
da matrizM
; 5R
r
=raio
(
c
r
)
,ondec
r
é o lusterformado pelajunção doslustersc
i
ec
j
; 6if (
R
r
≤
R
) then 7CLU ST ERS
=
CLU ST ERS
−
c
i
−
c
j
∪
c
r
; 8end 9
until
R
r
> R
; 10returnCLUSTERS 11
Figura 4.1: Cenário omagrupamento parao SHS.
4.1.2.2 MHS - Redes multi-salto
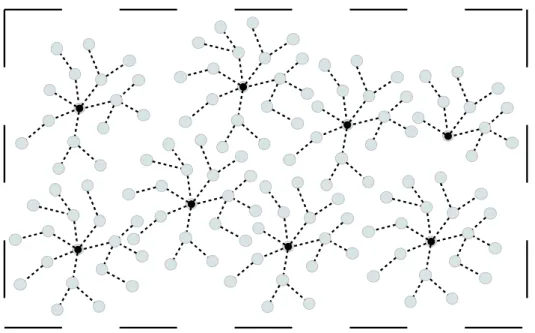
NoMHS,osnóssensoressãoagrupadosformandoárvoresdeoletadedadosomprofundidade
limitada. Nesse método o problemade agrupamento foi modelado omo o problemainverse
p-Center (Mirhandanie Franis ,1990),ondeédadoumonjunto
S
desensores,eoobjetivoé identiar umnúmero mínimo
p
de entros tal que oselementos de ada entro podem seomuniar,omum número limitado
λ
de saltos.Para onstruir os agrupamentos em forma de árvore exigidos pelo MHS, utilizamos o
algoritmo desrito em (Mirhandanie Franis , 1990 ), onde o problema inverse p-Center é
reduzido ao problema de obertura de onjunto. Dado um grafo
G
= (
S, B
)
, ondeS
é o onjunto denóssensoreseB
asarestasquerepresentamosenlaesdeomuniaçãoexistentesentre osnóssensores, onstruímos a matriz
A
ondea
ij
é igual a1 se o sensori
∈
S
tem umaminho em
G
até o sensorj
∈
S
om no máximoλ
saltos e 0 aso ontrário. SejaX
p
osub-onjunto de
p
sensores esolhidosomo entros. O sub-onjuntoX
p
é obtido resolvendoo problema de otimização (obertura mínima de onjuntos)
X
P
=
min
{
k
⊆
S
|
P
a
ik
x
k
≥
1
∀
i, x
k
∈ {
0
,
1
}}
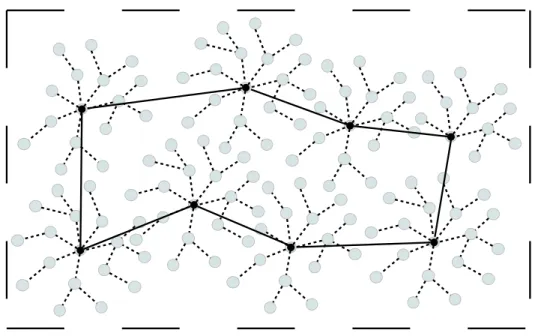
.Figura 4.2: Cenário omagrupamento parao MHS.
Essa onguração topológia da rede é disseminada ao agrupamento quando o sorvedouro
está posiionado sobre a raiz de uma árvore espeía e então envia a onguração para os
nós sensores da árvore. O sorvedouro envia uma mensagem om a onguração da árvore
para os nós sensores, os nós sensores que reebem a mensagem e fazem parte da árvore,
guardam essa mensagem e a propaga para seus vizinhos, os nós sensores que não fazem
parte somente ignoram essa mensagem. Esse proedimento reursivo onstroi a ávore de
oleta dedadosde formapareida omooorreemmétodosderoteamento emárvoreomoo
EFTREE (Figueiredo etal.,2004 ).
4.1.3 Controle de mobilidade do sorvedouro
O planejamento eiente de rotas para mover o sorvedouro sobre os agrupamentos de nós
sensores é um problema entral em nossos modelos. Esse planejamento tem um impato
signiativo emalgumasdasmaisimportantesmétriasemRSSFs,omoo atrasonaentrega
das mensagens e a taxa de suesso na entrega de mensagens. O sorvedouro móvel preisa
visitarada agrupamento de modoaminimizara perdademensagensporfaltadeespaço em
atrasonaentregadosdadosoletadospelosnóssensores,poisosnóssensorespreisamesperar
pelosorvedouro parareportá-los.
Se o tempo que um sensortem de esperar pelo sorvedouro para reportar seus dados for
muito longo, algunsdadospodemterdeser retiradosdo buer paraaomodar outros novos.
Por isso, o planejamento de rotapara movimentação do sorvedouro é umaimportanteparte
deste trabalho.
Osdoismétodospropostosdividemoonjuntode nóssensores
S
emsub-onjuntos(agru-pamentos)disjuntos,eosorvedouropreisavisitaradaumdessesagrupamentosparaoletar
dados. No método SHS, o sorvedouro preisa visitar o entro de ada agrupamento, e no
método MHSo sorvedouropreisavisitar araiz de ada árvore.
Nós modelamos o problema de planejamento das rotas omo o Problema do Caixeiro
Viajante(Dantzig etal.,1954 )(PCV)paraosdoismétodos. Cada agrupamento émodelado
omoumaidadedoPCVeasdistâniaseulidianasentreosagrupamentossãousadasomo
medidas de distânia. A solução do PCV fornee o planejamento da rota para o sorvedouro
móvel.
Existem diversos modelos matemátios e algoritmos para a solução do PCV de forma
ótima. Utilizamos o modeloabaixo para suasolução, apesar de suas limitações, ele é apaz
de resolverinstâniasdo tamanho dasenontradas nosnossosmodelos omputaionais. Seja
o grafo
G
= (
V, E
)
então oPCV podeser formulado omo:minimizar
X
(
i,j
)
∈
E
d
ij
x
ij
Sujeito a:
X
i
∈
V
x
ij
= 1
,
∀
j
∈
V
X
j
∈
V
X
ij
∈
E
x
ij
<
|
N
|
,
∀
N
⊂
V
x
ij
∈ {
0
,
1
}
,
∀
(
i, j
)
∈
E
Omodelo aima tem omosaída o planejamento darota do sorvedourosobre os
agrupa-mentosde nóssensorespara osdoismétodospropostos.
4.2 Arquiteturas de rede
Ossub-problemas apresentados sãotratadosemdoismétodosparaotimizaçãodoontrole de
densidade e ontrole de mobilidade do sorvedouro. Os doismétodos, o SHSe o MHS,fazem
usoda solução dossub-problemas apresentados deforma integrada. Nasduaspróximas
sub-seçõesapresentamos o método SHSe o MHSdetalhadamente.
4.2.1 SHS - Redes um-salto
Alguns trabalhos daliteratura, omo (Kimetal., 2003 ),mostram que emRSSFs om
omu-niação multi-saltos o roteamento de mensagens é um grande responsável pelo onsumo de
energia. O usto energétio de manter o rádio ligado, o usto para a transmissão e para a
reepçãodedadosparaoroteamentodedadosdeoutrossensoresontribuemparaoonsumo
de energia de nóssensores.
Para eliminaro onsumo de energia provoado peloroteamento de dados, diversos
auto-res(Shah et al.,2003 ;Gandham etal. ,2003 ;Kansal etal. ,2004 ; Jeaetal.,2005 ; Kimet al.,
2003 ; Wang etal., 2005a ) utilizam sorvedouro móvel para busar os dados dosnós sensores
om somente um-salto,evitando oroteamento dedados pelos nóssensores.
Neste trabalho propomos o métodoSHS (single-hop strategy), queutiliza uma estratégia
de omuniação um-salto,agrupando osnóssensores paraminimizar oaminho de oleta de
onde
R
é oraio de omuniação dosnóssensores edo sorvedouro.Opreçopagopelareduçãodoonsumodeenergiaé omaior atrasonaentregadas
mensa-gens ao sorvedouro móvel. A veloidade de um dispositivo móvel geralmenteé muito menor
que a veloidadeque um dado pode trafegar via omuniação sem o. Por isso, a utilização
de omuniação um-salto implia em umamaior atraso naentrega damensagens.
Dadoa onguração em agrupamentos de sensores,onde o sorvedouro é apazde
omu-niar omossensoresomum-salto,podemosimplementarumsistemade omuniação onde
asolisõesde paotessãoevitadas, reduzindoaindamaisaquantidade de energiaonsumida
na entrega de mensagens. No método SHS, osnóssensores omuniam-se om o sorvedouro
através de um protoolo baseado no TDM (Time Division Multiplexing). Esse meanismo
elimina as olisões, aumentando a eiênia da omuniação e suaimplementação neessita
troarpouas mensagensparagereniamento.
Aomuniação entreosorvedouroe umnósensoromeçaquandoo sorvedouroenvia um
sinalavisandoparaumsensorespeíoqueelepodetransmitirseusdados. Quandoosensor
terminar, osorvedouroéavisadoepodeenviarosinalautorizandooiníiode transmissãode
dadosparaoutronó sensor. Oproessoé repetidoatéquetodosossensoresdo agrupamento
tenham seus dadossoliitados.
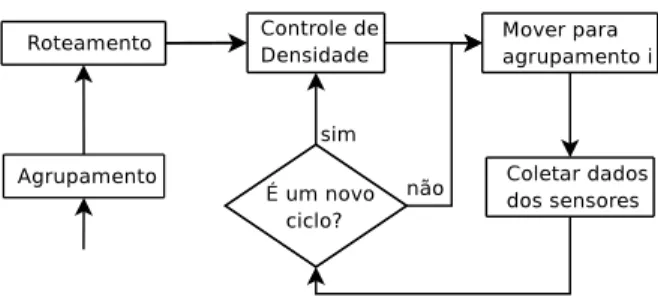
OsestadosdaRSSFomométodoSHSestãodesritosnagura4.3 , omsuasrespetivas
transições.
Figura 4.3: Método SHS.
No SHS, no iníio da operação da RSSF, o sorvedourodene osagrupamentos e planeja
A primeira tarefa ao iniiar um novo ilode oleta de dados é a solução do ontrole de
densidade. Osorvedouroexeuta omeanismode ontrole de densidade paraimplantá-lo na
RSSF àmedida quevaioletandoosdados dossensores.
Apósesse proedimento iniial,o sorvedouro omeça ase moverpara o primeiro
agrupa-mento do ilo. Ao reebero estímulo dosorvedouro, todososnóssensores do agrupamento
ativam seus rádios. Respeitando o modelo de omuniação TDM, o sorvedouro omeça o
proesso de requisição de dados de ada um dos nós sensores. Cada vez que o sorvedouro
iniia a omuniação om um nó sensor espeío, o sorvedouro envia a deisão de ontrole
de densidade para aquele nó espeío, informando-o se sua função de sensoriamento ará
ativa depois que reportar seus dados. Nesse método o tamanho de ada ilo de atividade
é denido por duas requisições onseutivas de dados pelo sorvedouro. Com isso, os ilos
sãoassínronos, denidos individualmenteparaadanó sensorededuração nãoonheida a
priori
Apósterminar o envio dos seus dados ao sorvedouro, ada nó sensordesativa seu rádio,
e também desativa suas funções de sensoriamento seele não for utilizado paraobertura no
ilo seguinte.
Quandonaliza aoletade dadosdetodososnóssensoresdoagrupamento,o sorvedouro
move-se para o próximo agrupamento no ilo e assim por diante. Ao retornar ao primeiro
agrupamento doilo, éiniiado umnovoilo euma novasolução doontrole de densidade
é gerado parao próximoilo.
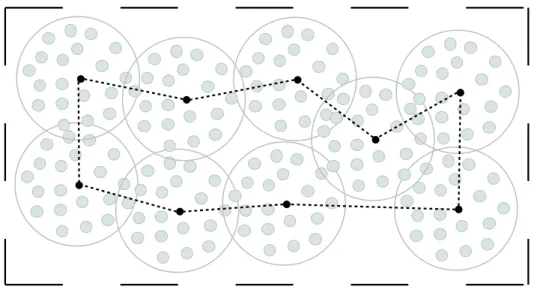
Agura4.4mostraumenárioondeométodoSHSéutilizadoparaaorganizaçãodaRSSF,
o ilo do sorvedouroé denidoentreo entrode ada umdosagrupamentosexistentes.
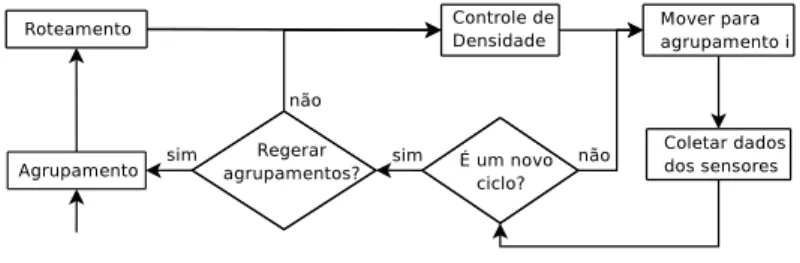
4.2.2 MHS - Redes multi-salto
A restriçãodeomuniaçãoum-salto omsorvedouromóvelemRSSFs aarretaumatrasona