UNIVERSIDADEFEDERALDO RIO GRANDE DO NORTE
UNIVERSIDADEFEDERAL DORIOGRANDE DO NORTE CENTRO DETECNOLOGIA
PROGRAMA DEP ´OS-GRADUAC¸ ˜AO EMENGENHARIA MECATRONICAˆ
Sistema Mecatrˆonico de Tempo Real para
Monitoramento da Qualidade da ´
Agua
Embarcado em Veleiro Rob´otico Autˆonomo
Andouglas Gonc¸alves da Silva J ´unior
Orientador: Prof. Dr. Luiz Marcos Garcia Gonc¸alves Co-orientador: Prof. Dr. Rafael Vidal Aroca
Dissertac¸˜ao de Mestrado apresentada ao Programa de P´os-Graduac¸˜ao em Engenharia Mecatrˆonica como parte dos requisitos para obtenc¸˜ao do t´ıtulo de Mestre em Engenharia Mecatrˆonica.
Silva Junior, Andouglas Gonc¸alves da.
Sistema mecatrˆonico de tempo real para monitoramento da qualidade da ´agua embarcado em veleiro rob´otico autˆonomo. / Andouglas Gonc¸alves da Silva J´unior. - Natal, RN, 2015.
100 f.:il.
Orientador: Luiz Marcos Garcia Gonc¸alves, Dr. Co-orientador: Rafael Vidal Aroca, Dr.
Dissertac¸˜ao (Mestrado) - Universidade Federal do Rio Grande do Norte. Cen-tro de Tecnologia. Programa de P´os-Graduac¸˜ao em Engenharia Mecatrˆonica.
1. Veleiro rob´otico autˆonomo - Dissertac¸˜ao. 2. Agua - Qualidade -´ Dissertac¸˜ao. 3. Sensoriamento - Dissertac¸˜ao. I. Gonc¸alves, Luiz Marcos Garcia. II. Aroca, Rafael Vidal. III. Universidade Federal do Rio Grande do Norte. IV. T´ıtulo.
Agradecimentos
A Deus, por sempre me conduzir nos caminhos da vida, permitindo que eu alcance os meu objetivos de acordo com a Sua vontade.
Ao meu orientador e ao meu co-orientador, professores Luiz Marcos e Rafael Aroca, sou grato pela orientac¸˜ao, sugest˜ao, apoio e paciˆencia.
Ao professor Justo e ao Gabriel, pelo apoio na realizac¸˜ao deste trabalho. A minha fam´ılia, espelho e ref´ugio para mim.
A minha noiva, por me ajudar e me apoiar em todos os momentos, sendo sempre suporte em minhas conquistas e realizac¸˜oes.
Aos meus amigos, em especial Tiago Natan e Thomaz Pereira, pelas orac¸˜oes e torcida para que tudo desse certo.
`
Resumo
Propomos um sistema mecatrˆonico para monitoramento da qualidade da ´agua em rios, lagoas, represas e no mar, capaz de realizar a coleta, processamento e apresentac¸˜ao dos dados via web, em tempo real, com o intuito de facilitar a sua an´alise de forma r´apida e precisa pelas comunidades interessadas. A arquitetura de hardware e software do sistema de monitoramento foi desenvolvida de forma que o mesmo possa ser gen´erico, quer dizer, dando suporte a diferentes aplicac¸˜oes. N˜ao obstante, a t´ıtulo de validac¸˜ao do sistema pro-posto, constru´ımos um prot´otipo que opera embarcado em um veleiro rob´otico autˆonomo, uma plataforma respons´avel por coletar os dados em v´arios pontos pr´e-definidos a partir de uma estac¸˜ao de terra, com um sistema de planejamento de navegac¸˜ao. Esta aplicac¸˜ao
final une as vantagens da autonomia de um veleiro rob´otico com a necessidade de moni-toramento r´apido e preciso da qualidade da ´agua, al´em do que a utilizac¸˜ao de um veleiro rob´otico autˆonomo n˜ao tripulado facilitar´a o desenvolvimento de outras pesquisas nessa ´area.
Abstract
We propose a mechatronic system for monitoring water quality in rivers, lakes, dams and sea, able to perform the acquisition, processing and presentation of data via the web in real time, in order to facilitate analysis quickly and needs by interested communities. The hardware architecture and software monitoring system has been developed so that it can be generic, that is, supporting different applications. Nevertheless, as a validation of the proposed system, we built a prototype that operates embarked on an autonomous robotic sailboat, a responsible platform for collecting the data in multiple predefined points from a ground station with a planning system navigation. Thisfinal application combines the advantages of autonomy of a robotic sailboat with the need for fast and accurate monito-ring of water quality, in addition to the use of an autonomous robotic sailboat unmanned facilitate the development of other research in this area.
Sum´ario
Sum´ario i
Lista de Figuras v
Lista de Tabelas vii
Lista de C´odigos ix
1 Introduc¸˜ao 1
1.1 Organizac¸˜ao do texto . . . 4
Lista de S´ımbolos e Abreviaturas 1 2 Fundamentac¸˜ao Te´orica 5 2.1 Regulamentac¸˜ao da Qualidade da ´Agua . . . 5
2.2 Vari´aveis de An´alise da ´Agua . . . 8
2.2.1 Oxigˆenio Dissolvido . . . 8
2.2.2 pH - Potencial Hidrogeniˆonico . . . 8
2.2.3 Turbidez . . . 9
2.2.4 Condutividade . . . 9
2.2.5 Temperatura . . . 9
2.2.6 POR - Potencial de Oxirreduc¸˜ao . . . 10
2.3 Sensores . . . 11
2.4 Conversor Anal´ogico-Digital (ADC) . . . 12
2.5 Comunicac¸˜ao . . . 12
2.5.1 Protocolo SPI . . . 13
2.5.2 Protocolo I2C . . . 14
2.5.3 Comunicac¸˜ao Socket . . . 15
2.6 Interface Web . . . 15
2.6.1 Servlet . . . 15
3 Estado da Arte 19
3.1 Sistemas de An´alise da ´Agua . . . 19
3.2 Veleiros Rob´oticos Autˆonomos . . . 21
4 Sistema Proposto 27 4.1 Problema . . . 27
4.2 Proposta . . . 28
4.2.1 Arquitetura de Hardware do Sistema . . . 28
4.2.2 Arquitetura de Software do Sistema . . . 39
5 Implementac¸˜oes 45 5.1 Construc¸˜ao Mecˆanica . . . 45
5.1.1 Estrutura Mecˆanica do Sistema Eletrˆonico . . . 45
5.1.2 Sistema de Acionamento para Inserc¸˜ao e Remoc¸˜ao dos Sensores da ´Agua . . . 46
5.2 Implementac¸˜ao Eletrˆonica . . . 47
5.2.1 Projeto de Funcionamento do MCP3008 . . . 47
5.2.2 Projeto de Funcionamento dos EZOs . . . 48
5.2.3 Projeto de Funcionamento do Microcontrolador AtMega 328 . . . 50
5.2.4 Rel´ogio do Sistema . . . 51
5.3 Implementac¸˜ao Computacional . . . 54
5.3.1 Configurac¸˜oes de Ambiente . . . 54
5.3.2 Inicializac¸˜ao do Sistema . . . 58
5.3.3 Acionamento do Sistema Mecˆanico, Aquisic¸˜ao e Envio dos Dados 59 5.3.4 Funcionamento do Servidor e Apresentac¸˜ao dos Dados para o Usu´ario . . . 62
6 Experimentos e Resultados 65 6.1 Experimentos e Resultados Manuais . . . 65
6.2 Experimentos e Resultados com o Sistema Desenvolvido . . . 67
6.3 Comparativo . . . 72
6.4 Ambiente Web . . . 73
Lista de Figuras
1.1 Fluxo de funcionamento do sistema proposto. . . 2
2.1 Gr´aficos de Qualidade em func¸˜ao de sua Concentrac¸˜ao ou Medida [ANA 2015]. . . 7
2.2 Kit de sensores adquiridos para o projeto. . . 11
2.3 EZOTMpH da Atlas Scientific. . . 11
2.4 Estrutura Padr˜ao de um Sistema Mecatrˆonico. . . 12
2.5 Arquitetura do protocolo de comunicac¸˜ao SPI. . . 13
2.6 Arquitetura do protocolo de comunicac¸˜ao I2C. . . 14
2.7 Funcionamento B´asico de um Servlet. . . 16
3.1 MERHAB Autonomous Research Vesse. [Hanggi 2009] . . . 20
3.2 AUV desenvolvido pelo Mote Marine Laboratory. [AUVAC2015] . . . . 21
3.3 Nautimodelo usado na primeira fase do N-Boat. . . 24
3.4 Mapa de localizac¸˜ao de partes do N-Boat. . . 25
4.1 Arquitetura de Hardware de Alto N´ıvel. . . 29
4.2 Placa Raspberry Pi - Modelo B. . . 29
4.3 CI DS1307. . . 30
4.4 Arquitetura de Hardware - M´odulo de Sensoriamento. . . 31
4.5 Conversor A/D com sa´ıda SPI - MCP3008. . . 32
4.6 Sensor de Temperatura. . . 32
4.7 Sensor, EZO e substˆancia de calibrac¸˜ao - pH. . . 33
4.8 Sensor, EZO e substˆancia de calibrac¸˜ao - POR. . . 34
4.9 Sensor, EZO e substˆancia de calibrac¸˜ao - Condutividade. . . 35
4.10 Sensor, EZO e substˆancia de calibrac¸˜ao - O.D. . . 36
4.11 Microcontrolador AtMega. . . 37
4.12 Esboc¸o do Sistema de Acionamento. . . 37
4.13 Arquitetura de Hardware - M´odulo de Comunicac¸˜ao. . . 38
5.1 Caixa de acr´ılico modificada. . . 46
5.2 Estrutura parafixac¸˜ao dos componentes do acionamento mecˆanico. . . 46
5.3 Estrutura Mecˆanica Completa. . . 47
5.4 Esquem´atico do MCP3008. . . 48
5.5 Esquem´atico de Adaptac¸˜ao dos EZO’s e conectores. . . 49
5.6 Comunicac¸˜ao entre os EZOs e o Raspberry via I2C. . . 49
5.7 Esquem´atico do AtMega 328. . . 50
5.8 Esquem´atico do RTC. . . 51
5.9 Esquem´atico da placa de hardware do sistema proposto. . . 52
5.10 Prot´otipo do Circuito Eletrˆonico Completo. . . 53
5.11 Projeto da placa impressa. . . 54
5.12 Comando pintest para controle dos pinos de comunicac¸˜ao. . . 55
5.13 Comando i2cdetect para vizualizac¸˜ao dos enderec¸os do EZOs, RTC e At-Mega. . . 55
5.14 Configurac¸˜ao do IP est´atico no arquivo/etc/network/interfaces. . . 56
5.15 Esquema do Banco de Dados Relacional. . . 57
5.16 Funcionamento do Sistema Mecˆanico. . . 59
5.17 Rotina Multitarefa. . . 61
6.1 Mapa com os lugares de coleta de dados. . . 66
6.2 Fita Utilizada no M´etodo Manual. . . 67
6.3 Escala de Cores para Comparac¸˜ao Utilizada no M´etodo Manual. . . 67
6.4 Medic¸˜oes Manuais. . . 68
6.5 Gr´afico de Variac¸˜ao do pH. . . 68
6.6 Gr´afico da Variac¸˜ao da Condutividade. . . 69
6.7 Gr´afico da Variac¸˜ao da Condutividade e Temperatura ap´os inserc¸˜ao de gelo e sal. . . 69
6.8 Gr´aficos do Lago Azul. . . 70
6.9 Gr´aficos da Lagoa de Alcac¸uz. . . 71
6.10 Gr´aficos do Rio Pium. . . 71
6.11 Gr´aficos do “Riozinho”. . . 71
6.12 Gr´aficos do “Riozinho” com Modificac¸˜oes. . . 72
Lista de Tabelas
2.1 Parˆametros e pesos do IQA [ANA 2015]. . . 6
2.2 Faixas de valores do IQA utilizados no Brasil e suas avaliac¸˜oes [ANA 2015]. 8 2.3 Pinos da comunicac¸˜ao SPI. . . 13
3.1 Comparativo entre os projetos apresentados e o proposto. . . 23
4.1 Mapeamento dos Pinos do Raspberry para comunicac¸˜ao SPI . . . 30
4.2 Mapeamento dos Pinos do Raspberry para comunicac¸˜ao I2C . . . 30
5.1 Ligac¸˜ao entre os pinos do MCP3008 e o Raspberry . . . 48
6.1 Valores de Temperatura na An´alise Manual. . . 66
Lista de Algoritmos
5.1 C´odigo de criac¸˜ao do banco de dados. . . 57
5.2 Script no arquivorc.local. . . 58
5.3 Trecho do c´odigo do acionamento do sistema mecˆanico. . . 59
5.4 Trecho de c´odigo do processo de aquisic¸˜ao dos dados. . . 62
5.5 Trecho do c´odigo de inicializac¸˜ao da p´agina dos gr´aficos. . . 62
5.6 Trecho do c´odigo da requisic¸˜ao AJAX. . . 63
Cap´
ı
tulo 1
Introduc¸˜ao
O termo mecatrˆonica foi inventado por um engenheiro Japonˆes em 1969 como uma combinac¸˜ao de meca, de mecanismos, e trˆonica, de eletrˆonica [Bolton 2009]. Consiste em uma ´area relativamente nova, por´em com aplicac¸˜oes importantes na junc¸˜ao das ´areas de mecˆanica, el´etrica e computac¸˜ao. Um sistema mecatrˆonico n˜ao corresponde apenas a um sistema el´etrico e mecˆanico, ou apenas a um sistema de controle: ele ´e uma integrac¸˜ao completa de todos esses sistemas e h´a uma abordagem simultˆanea destes neste projeto.
Utilizando-se desse conceito, combinando as diferentes ´areas nele contidas e anali-sando os problemas atuais relativos a quantidade e qualidade da ´agua que est˜ao se tor-nando cada vez mais presentes, propomos um sistema de monitoramento da qualidade da ´agua em rios, lagos, lagoas e mares, que coleta dados em tempo real, com o intuito de facilitar a an´alise dos reservat´orios, de forma r´apida e precisa, permitindo uma ac¸˜ao mais ´agil e pontual, afim de diminuir ou at´e evitar o agravamento da situac¸˜ao atual.
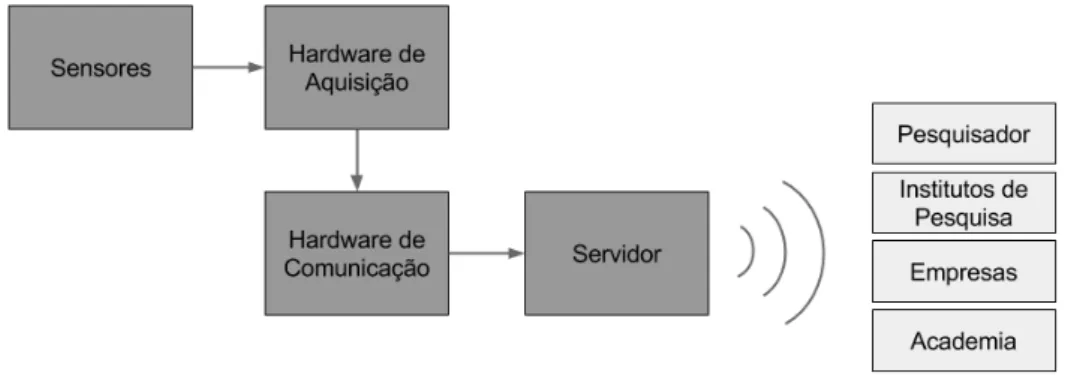
Basicamente, o sistema adquire dados de sensores de qualidade da ´agua por meio de um hardware de aquisic¸˜ao comandado por um computador central de controle. Esse computador recebe os dados, processa-os e envia-os para um servidor Web. O servidor disponibiliza esses dados em uma p´agina dinˆamica, atualizando gr´aficos em tempo real, podendo ser acessado por qualquer usu´ario interessado em utilizar os dados coletados. O funcionamento apresentado pode ser visto, por meio de um diagrama de blocos, nafigura 1.1.
Para tal, ´e utilizado um kit de sensores da Atlas Scientific, que monitora alguns parˆametros f´ısico-qu´ımicos da qualidade da ´agua, como: pH1, temperatura, POR2, con-dutividade e quantidade de oxigˆenio. Cada um desses parˆametros consiste em um im-portante meio para definir a qualidade da ´agua, dado que cada um apresenta uma relac¸˜ao de causa e efeito para se determinar se a ´agua ´e pr´opria para consumo ou se est´a de
Figura 1.1: Fluxo de funcionamento do sistema proposto.
acordo para manutenc¸˜ao da vida aqu´atica local. Al´em disso, um computador embarcado de baixo custo para aquisic¸˜ao, an´alise e tratamento dos dados tamb´em ´e utilizado, permi-tindo a automatizac¸˜ao do sistema. Todos os dados gerados s˜ao mostrados, em tempo real, atrav´es de uma interface Web, na qual pesquisadores, agˆencias relacionadas ao monitora-mento de ´aguas ou at´e a populac¸˜ao local podem verific´a-los e analis´a-los segundo normas j´a definidas por ´org˜aos p´ublicos e privados.
A necessidade de monitorar a quantidade e qualidade da ´agua s˜ao diversas. Sabe-se que a ´agua ´e uma substˆancia inorgˆanica de fundamental importˆancia para a existˆencia dos seres vivos. Ela ´e o componente mais abundante dos corpos vivos, atingindo um percentual m´edio de 75 % de toda a mat´eria viva. Esse componente atua, ainda, como um solvente de dispers˜ao universal de compostos orgˆanicos e inorgˆanicos e ´e essencial para as reac¸˜oes biol´ogicas e qu´ımicas. Al´em disso, funciona como um ve´ıculo de transporte que faz a troca de substˆancias intra e extracelular e desempenha um papel de grande importˆancia como um reagente nas transformac¸˜oes moleculares [Soares 1993].
3 Os avanc¸os cient´ıficos e tecnol´ogicos vˆem favorecendo esse monitoramento, ajudando a identificar os problemas atrav´es da aquisic¸˜ao e an´alise de dados em tempo real e, muitas vezes, de forma autˆonoma. Como o pesquisador n˜ao precisa mais ir a campo para obter dados de sensores para seus estudos, ele pode focar diretamente na an´alise desses dados e em uma poss´ıvel soluc¸˜ao para as diversas situac¸˜oes j´a discutidas anteriormente.
Desta forma, utilizando-se de uma arquitetura de hardware e software bem estruturada e que permita a construc¸˜ao de um sistema automatizado, deseja-se definir e disponibilizar dados relativos a qualidade da ´agua, relacionando-os com modelos matem´aticos presente em normas estabelecidadas por org˜aos p´ublicos, apresentando, por meio desses modelos, a qualidade da ´agua de rios, lagos, lagoas e mares.
Muitas s˜ao as aplicac¸˜oes deste sistema. Por´em, a principal aplicac¸˜ao ´e a sua utilizac¸˜ao em um veleiro rob´otico autˆonomo, desenvolvido pelo Laborat´orio Natalnet da Universi-dade Federal do Rio Grande do Norte, no qual o sistema ser´a embarcado, podendo coletar dados de grandes ´areas marinhas. Diversas s˜ao as vantagens da utilizac¸˜ao de ve´ıculos como esses para um sistema mecatrˆonico autˆonomo. Por exemplo, muitos barcos movi-dos `a motor utilizam combust´ıveis como forma de propuls˜ao atrav´es da combust˜ao. Tal forma de gerac¸˜ao de energia dificulta a autonomia desses barcos e, consequentemente, a sua utilizac¸˜ao para fins de monitoramento de grandes ´areas aqu´aticas. Outros tipos de ve´ıculos aqu´aticos, que utilizam motores el´etricos, enfrentam problemas com alto gasto de energia direcionada, exclusivamente, para seus acionamentos, diminuindo as-sim a autonomia dispon´ıvel para sistemas embarcados utilizados na automac¸˜ao do barco. Dessa forma, a propuls˜ao atrav´es dos ventos utilizada nos veleiros se apresenta como uma poss´ıvel soluc¸˜ao na automac¸˜ao de tais sistemas. Como a navegac¸˜ao ´e feita atrav´es da movimentac¸˜ao do leme e da vela, a arquitetura dos veleiros permitem disponibilizar mais energia para tarefas de sensoriamento, processamento e comunicac¸˜ao, al´em de faci-litar a utilizac¸˜ao de sistemas de controle de carga, como os usados em pain´eis solares na gerac¸˜ao de energia. Dessa forma, projetos relacionados a veleiros rob´oticos autˆonomos vˆem se tornando cada vez mais comuns. Um dos pontos de utilizac¸˜ao desses ve´ıculos ´e o monitoramento de ´aguas em rios, lagos ou mares.
1.1
Organizac¸˜ao do texto
Este documento est´a dividido em 7 cap´ıtulos.
• O Cap´ıtulo 1 apresenta o contexto no qual este trabalho est´a inserido e as suas
contribuic¸˜oes;
• O Cap´ıtulo 2 discute a fundamentac¸˜ao te´orica sobre as abordagens existentes para
an´alise da qualidade da ´agua e os protocolos de comunicac¸˜ao utilizados, bem como sensores e ferramentas utilizadas para a construc¸˜ao do sistema;
• O Cap´ıtulo 3 aborda alguns m´etodos j´a existentes para coleta e an´alise de dados da
qualidade da ´agua;
• O Cap´ıtulo 4 apresenta uma abordagem mais consistente sobre o projeto, como
funciona, os problemas e soluc¸˜oes que se pretende alcanc¸ar com este trabalho;
• O Cap´ıtulo 5 mostra as implementac¸˜oes realizadas, separadas pelas ´areas da
me-catrˆonica: eletrˆonica, computac¸˜ao e mecˆanica;
• O Cap´ıtulo 6 mostra os experimentos realizados com o sistema e os testes de
validac¸˜ao do sistema;
• O Cap´ıtulo 7 apresenta as an´alises dos resultados, apresentando as conclus˜oes, as
Cap´
ı
tulo 2
Fundamentac¸˜ao Te´orica
De modo a informar o leitor a respeito das tecnologias e m´etodos utilizados neste trabalho s˜ao apresentados e discutidos, neste cap´ıtulo, alguns conceitos que s˜ao impor-tantes no processo de desenvolvimento do sistema proposto. Inicialmente ´e discutido como ´e feito o processo de regulamentac¸˜ao da qualidade da ´agua, mostrando os org˜aos respons´aveis e o ´ındices utilizados neste processo. Depois disso, alguns parˆametros f´ı sico-qu´ımicos s˜ao introduzidos, assim como os sensores que s˜ao utilizados neste trabalho. Por
fim, termos t´ecnicos e conceitos como interface Web, banco de dados e multiprogramac¸˜ao s˜ao apresentados e abordados no contexto do sistema proposto.
2.1
Regulamentac¸˜ao da Qualidade da ´
Agua
No processo de an´alise da qualidade da ´agua ´e necess´ario identificar parˆametros e indicadores j´a existentes e aplicados por agˆencias ou programas de org˜aos p´ublicos. Es-ses org˜aos s˜ao respons´aveis por padronizar formas de medic¸˜ao e de indicadores para o monitoramento da qualidade da ´agua.
O CONAMA (2015) - Conselho Nacional do Meio Ambiente - ´e o org˜ao respons´avel por desenvolver projetos de leis, normas e resoluc¸˜oes para a an´alise da qualidade da ´agua. A partir das normas estabelecidas pelo CONAMA, a ANA pode conduzir o seu trabalho defiscalizac¸˜ao e gest˜ao dos recuros h´ıdricos brasileiros.
Para o monioramento da qualidade da ´agua, v´arios org˜aos como a ANA, utilizam parˆametros de indicadores da qualidade da ´agua. Um desses indicadores ´e o IQA - ´Indice de Qualidade das ´Aguas. Criado em 1970, no Estados Unidos, pelaNational Sanitation Foundation, tem como principal objetivo avaliar a qualidade da ´agua visando o seu uso para o abastecimento p´ublico ap´os tratamento.
O IQA ´e composto por 9 parˆametros com seus respectivos pesos (Tabela 2.1) que foramfixados em func¸˜ao da sua importˆancia para a conformac¸˜ao global da qualidade da ´agua.
Tabela 2.1: Parˆametros e pesos do IQA [ANA 2015].
Parˆametro Peso(w)
Oxigˆenio Dissolvido 0,17 Coliformes fecais 0,15 Potencial hidrogeniˆonico (pH)
0,12 Demanda Bioqu´ımica de Oxigˆenio
0,10 Temperatura da ´agua 0,10 Nitrogˆenio total 0,10 Fosforo total 0,10 Turbidez 0,08 Res´ıduo total 0,08
Para o c´alculo do IQA, ´e utilizado ainda um valor de qualidade (q), que varia de 0 a 100, associado a cada parˆametro obtido do respectivo gr´afico de qualidade em func¸˜ao de sua concentrac¸˜ao ou medida (Figura 2.1).
Porfim, o IQA ´e dado por:
IQA=
n
∏
i=1
qiwi (2.1)
Onde q ´e a qualidade e w o peso.
2.1. REGULAMENTAC¸ ˜AO DA QUALIDADE DA ´AGUA 7
Figura 2.1: Gr´aficos de Qualidade em func¸˜ao de sua Concentrac¸˜ao ou Medida [ANA 2015].
Tabela 2.2: Faixas de valores do IQA utilizados no Brasil e suas avaliac¸˜oes [ANA 2015].
AL, MG, MT, PR, RJ, RN, RS
BA, CE, ES, GO, MS, PB, PE, SP
Avaliac¸˜ao da Qualidade da ´agua
91 - 100 80 - 100 Otima´ 71 - 90 52 - 79 Boa 51 - 70 37 - 51 Razo´avel 26 - 50 20 - 36 Ruim
0 - 25 0-19 P´essima
2.2
Vari´aveis de An´alise da ´
Agua
Na an´alise da qualidade da ´agua de reservat´orios, rios ou lagoas, algumas vari´aveis, tamb´em conhecidas como parˆametros f´ısico-qu´ımicos, s˜ao fundamentais para estudos precisos e para a busca de soluc¸˜oes para problemas da fauna e flora mar´ıtima. A se-guir s˜ao apresentados alguns desses parˆametros que s˜ao utilizados para c´alculo de ´ındices de qualidade da ´agua.
2.2.1
Oxigˆenio Dissolvido
Segundo Piveli & Kato (2006), tanto para processos de respirac¸˜ao aer´obia, como ´e o caso do oxigˆenio dissolvido, como para a manutenc¸˜ao de um ambiente que possibilite a realizac¸˜ao de reac¸˜oes qu´ımicas importantes para a vida, como ´e o caso do pH (discutido em seguida), a an´alise desses dois parˆametros ´e de fundamental importˆancia para vida marinha.
Sabe-se que o oxigˆenio ´e um g´as pouco sol´uvel em ´agua, variando a solubilidade entre 15mgL−1 a 0oC at´e 8mgL−1 a 25oC, dependendo da press˜ao (altitude) e sais
dis-solvidos [Gastaldini et al. 2001]. O oxigˆenio dissolvido ´e o principal parˆametro para a caracterizac¸˜ao dos efeitos de poluic¸˜ao por despejos orgˆanicos. Os valores para o oxigˆenio dissolvido em qualquer amostra n˜ao pode ser inferior a 6mgL−1[CONAMA 1986].
2.2.2
pH - Potencial Hidrogeniˆonico
2.2. VARI ´AVEIS DE AN ´ALISE DA ´AGUA 9 organismos aqu´aticos, como ofitoplˆancton e o zooplˆancton, est˜ao, geralmente, adaptados `as condic¸˜oes em que o pH ´e neutro, e as alterac¸˜oes bruscas no pH da ´agua podem ser prejudiciais para tais organismos.
Segundo o CONAMA (1986), os valores do pH devem se situar entre 6 a 9 para as ´aguas doces e destinadas ao consumo humano.
2.2.3
Turbidez
A turbidez tamb´em ´e importante no processo de monitoramento da qualidade da ´agua e consiste no grau de atenuac¸˜ao que a luz sofre ao atravessar a ´agua, conferindo-lhe uma aparˆencia turva por efeito da presenc¸a de mat´eria em suspens˜ao. Nos corpos d’´agua, por exemplo, a penetrac¸˜ao da luz ´e reduzida devido a turbidez, reduzindo tamb´em o processo de fotoss´ıntese [Ara´ujo 2010].
De acordo com os padr˜oes de ´agua do CONAMA (1986), no caso da ´agua doce, os valores m´aximos desej´aveis e permitidos s˜ao de at´e 40 unidades nefelom´etricas 1 de turbidez (UNT), quando se enquadram dentro da classe 1 e, no caso de consumo humano, s˜ao de at´e 5 UNT.
2.2.4
Condutividade
A ´agua em seu estado puro possui a capacidade de solubilizac¸˜ao de substˆancias, prin-cipalmente sais, fazendo com que as ´aguas naturais apresentem um grande valor de con-dutividade el´etrica. Essa concon-dutividade depende da estequiometria do mineral dissolvido (ˆanions e c´ations presentes) da sua concentrac¸˜ao [Rand et al. 1976]. A condutividade aumenta tamb´em com a temperatura [Libˆanio 2008].
A condutividade ´e expressa em microSiemens por cent´ımetro (µScm−1) e apresenta
caracter´ısticas similares aos s´olidos totais dissolvidos. Em ´aguas naturais, pode apresentar valores inferiores a 100µScm−1, podendo atingir at´e 1.000µScm−1quando as ´aguas
rece-bem cargas de efluentes dom´esticos e industriais [Libˆanio 2008, Gastaldini et al. 2001].
2.2.5
Temperatura
A temperatura pode influenciar nos processos biol´ogicos, reac¸˜oes qu´ımicas e bioqu´ımicas e na solubilidade de gases dissolvidos. Esse parˆametro ´e importante para a produtividade
1A unidade nefelom´etrica ´e obtida a partir da an´alise nefelom´etrica que consiste em uma t´ecnica que
mede a quantidade de radiac¸˜ao espalhada que chega a um detector posicionado a 90◦em relac¸˜ao a fonte de
biol´ogica, sendo o principal fator limitante na distribuic¸˜ao geogr´afica de muitas esp´ecies de plantas e animais [Von Sperling 1996].
As ´aguas s˜ao classificadas como frias quando a m´edia da temperatura anual ´e de 19oC ou menores. A legislac¸˜ao brasileira n˜ao estabelece temperatura m´axima para a ´agua, os padr˜oes canadenses e americanos estipulam como valor m´aximo 15oC [Libˆanio 2008].
2.2.6
POR - Potencial de Oxirreduc¸˜ao
O potencial redox (POR) mede a capacidade do ambiente de fornecer el´etrons a um agente oxidante, ou em retirar el´etrons de um agente redutor, caracterizando o estado oxidac¸˜ao-reduc¸˜ao na ´agua. O potencial redox ´e expresso normalmente emmV [Gastaldini et al. 2001]. Al´em disso, a partir dos valores de POR, ´e poss´ıvel analisar a existˆencia de metais como ferro e manganˆes [Fuchs 2012].
V´arios outros parˆametros tamb´em s˜ao utilizados para a indicac¸˜ao da qualidade da ´agua, como, por exemplo, o Nitrito e o Nitrato, importantes no processo de identific¸˜ao da possibilidade de vida marinha. Por´em, os parˆametros apresentados anteriormente s˜ao bastante encontrados desde aplicac¸˜oes com alto grau de complexidade, at´e aplicac¸˜oes simples. Deste modo, com o intuito de disponibilizar dados de interesse no processo de an´alise da qualidade da ´agua e para validar o sistema proposto, as vari´aveis abordadas neste projeto s˜ao: pH, condutividade, temperatura, concentrac¸˜ao deO2dissolvido e POR.
Vale salientar que o sistema ´e escalon´avel e adaptativo, ou seja, ´e poss´ıvel aumentar a quantidade de sensores. Ou seja, dependendo da an´alise que se deseja fazer, outras vari´aveis podem ser medidas, bastando apenas inserir no sistema o sensor necess´ario para fazer determinada medic¸˜ao e dar suporte a esta medic¸˜ao na telemetria. Deste modo, ´e poss´ıvel adaptar o sistema para diferentes formas de indicadores da qualidade da ´agua.
2.3. SENSORES 11
2.3
Sensores
Para cada vari´avel apresentada na sec¸˜ao anterior, um sensor ´e utilizado para capturar a informac¸˜ao de interesse. Para tal, um estudo de sensores voltados para este fim foi realizado e, pela simplicidade de utilizac¸˜ao em sistemas embarcados e o seu baixo custo, o kit da Atlas Scientific [Atlas Scientific2015], mostrado nafigura 2.2 foi escolhido para ser utilizado neste projeto.
Figura 2.2: Kit de sensores adquiridos para o projeto.
Este kit apresenta sensores de pH, condutividade, temperatura, concentrac¸˜ao deO2 e
POR. O custo do kit, juntamente com produtos qu´ımicos para calibrac¸˜ao, ´e de $713,95. Al´em do baixo custo, esse kit apresenta uma interface para sistemas embarcados que facilita sua utilizac¸˜ao. Na aquisic¸˜ao deste Kit, al´em dos sensores, s˜ao adquiridos tamb´em os conectores e pequenas placas de circuito chamadas de EZOTM (Figura 2.3). Essas placas recebem os sinais dos sensores e atrav´es de circuitos integrados convertem o sinal para a unidade correspondente de cada sensor, facilitando assim a aquisic¸˜ao dos dados. Al´em disso, os EZOs permitem fazer calibrac¸˜oes nos sensores, armazenam informac¸˜oes de compensac¸˜ao, j´a que apresenta mem´oria EEPROM 2 interna e comunica-se com mi-crocontroladores ou microprocessadores atrav´es dos protocolosUART 3eI2C(abordados na pr´oxima sec¸˜ao).
Figura 2.3: EZOTM pH da Atlas Scientific.
2.4
Conversor Anal´ogico-Digital (ADC)
A maiora dos sistemas mecatrˆonicos que necessitam adquirir dados por meio de senso-res e que atuam no mundo externo utilizando-se de atuadosenso-res s˜ao baseados numa estrutura padr˜ao. A Figura 2.4 mostra essa estrutura b´asica.
Figura 2.4: Estrutura Padr˜ao de um Sistema Mecatrˆonico.
As variac¸˜oes que acontecem no mundo real s˜ao anal´ogicas. Por´em, as unidades de processamento de sistemas eletrˆonicos, como o microcontrolador e o microprocessador, processam apenas sinais digitais. Com isso, em equipamentos que necessitam utilizar-se dos sinais anal´ogicos em sistemas digitais, como ´e o caso deste, ´e necess´ario a utilizac¸˜ao de um conversor anal´ogico-digital.
A entrada de um ADC ´e um sinal anal´ogico e a sa´ıda ´e uma palavra bin´aria que representa o n´ıvel do sinal de entrada. Apenas a n´ıvel de conhecimento, existem m´etodos para essa convers˜ao. Os mais comuns s˜ao: aproximac¸˜oes sucessivas, o da rampa, o duplo rampa e oflash [Bolton 2009].
Alguns CIs 4 implementam conversores ADC e podem ser utilizados usando algum tipo de protocolo. ´E o caso do MCP3008, utilizado neste trabalho. Este CI ´e um ADC de 16 pinos, sendo 8 de entradas anal´ogicas e mais 8 de sinais de controle, com sa´ıda SPI.
Muitos sistemas que necessitam atuar utilizam-se de conversores digitais-anal´ogicos. Neste projeto, utiliza-se o conversor D/A do microcontrolador - baseado em PWM, mas de baixa potˆencia, necessitando de amplificac¸˜ao no sinal - para atuar no controle de um servo motor para o sistema de acionamento.
2.5
Comunicac¸˜ao
Um dos pontos mais importantes de uma arquitetura de hardware ´e a comunicac¸˜ao en-tre os dispositivos. Cada componente precisa ser compat´ıvel com o protocolo dos dados que transitam nos barramentos para que possam distribu´ı-los de uma forma r´apida e otimi-zada. Para isso, alguns protocolos de comunicac¸˜ao bem definidos j´a s˜ao utilizados, como ´e o caso do I2C, SPI, UART, etc. Cada protocolo apresenta caracter´ısticas peculiares que apresentam vantagens e desvantagens em sua utilizac¸˜ao.
2.5. COMUNICAC¸ ˜AO 13 Como abordado anteriormente, os EZOTMs suportam a comunicac¸˜ao UART e I2C. Como ´e necess´ario receber dados de v´arios sensores diferentes, tudo gerenciado pelo computador de processamento, o protocolo I2C se apresenta como melhor alternativa para utilizac¸˜ao neste projeto.
Al´em dos dois protocolos citados, oSockettamb´em ´e utilizado na comunicac¸˜ao entre o processo principal do sistema e o servidor.
2.5.1
Protocolo SPI
A comunicac¸˜ao SPI (Serial Peripheral Interface) [Leens 2009] utiliza o princ´ıpio de mestre e escravo. O mestre coordena e tem o controle total dessa comunicac¸˜ao, enviando e recebendo dados dos escravos, atrav´es de requisic¸˜oes diretas. Afigura 2.5 mostra um diagrama de blocos de funcionamento desse protocolo.
Figura 2.5: Arquitetura do protocolo de comunicac¸˜ao SPI. Para o seu funcionamento s˜ao utilizados quatro pinos digitais:
Tabela 2.3: Pinos da comunicac¸˜ao SPI.
Pino Descric¸˜ao
SCLK Clock
MISO Master In Slave Out MOSI Master Out Slave In SS Slave Selected.
Neste projeto, a comunicac¸˜ao com os sensores anal´ogicos ´e feita utilizando o proto-colo SPI.
2.5.2
Protocolo I
2C
O protocolo de comunicac¸˜ao I2C (Inter-Integrated Circuit) [Leens 2009], desenvol-vido pela Philips, assim como o protocolo SPI, tamb´em funciona sobre o modelo de mestre e escravo. Por´em, este protocolo s´o necessita de duas linhas bidirecionais: a linha de dados (SDA) e a linha serial de clock (SCL) com resistorespull-up, como mostrado na
figura 2.6.
Figura 2.6: Arquitetura do protocolo de comunicac¸˜ao I2C.
Para a comunicac¸˜ao iniciar, o mestre precisa gerar o clock e comunicar com o es-cravo, enviando um bit inicial, seguido de um enderec¸o de 7-bits, que corresponde a qual escravo o mestre precisa enviar a mensagem. O escravo que recebe a mensagem retorna a solicitac¸˜ao para o mestre.
Algumas operac¸˜oes de baixo n´ıvel, como o formato do sinal que ´e enviado na comunicac¸˜ao, tanto SPI quanto I2C, foram omitidos deste trabalho. Dado que, neste trabalho, s˜ao utili-zadas bibliotecas que gerenciam essa comunicac¸˜ao em alto n´ıvel, esses detalhes n˜ao pre-cisam ser estudados com ˆenfase. Para este trabalho, ser´a utilizada a biblioteca de c´odigo abertoWiringPi[Library WiringPi2015], feita de modo a facilitar as comunicac¸˜oes com o computador de processamento sobre v´arios protocolos, entre eles os dois apresentados anteriormente. Al´em dessa biblioteca, implementac¸˜oes diretas na biblioteca spidev do kernel do linux tamb´em ´e utilizada, dada a necessidade de adaptar algumas mensagens para utilizac¸˜ao dos EZOs.
2.6. INTERFACE WEB 15
2.5.3
Comunicac¸˜ao Socket
A interface Socketsurgiu no in´ıcio de 1980 na Universidade de Berkeley como parte de um ambiente UNIX [Forouzan & Mosharraf 2013]. Consiste em um mecanismo de comunicac¸˜ao, usado normalmente para implementar um modelo cliente/servidor, que per-mite a troca de mensagens entre os processos de uma m´aquina/aplicac¸˜ao servidor e de uma m´aquina/aplicac¸˜ao cliente.
Como uma arquitetura de rede de computadores est´a fora do escopo deste trabalho, basta entender que, basicamente, a comunicac¸˜ao viasocketacontece da seguinte forma:
1. O servidor espera por conex˜ao dos clientes;
2. O cliente estabelece conex˜ao com o servidor, conectando-se a um porta da m´aquina em que este est´a sendo executado;
3. O servidor aceita a conex˜ao e aguarda por requisic¸˜oes; 4. O cliente solicita dados ao servidor;
5. O servidor responde a solicitac¸˜ao do cliente;
6. O servidor aguarda nova requisic¸˜ao ou o cliente/servidor fecha a comunicac¸˜ao. Utilizando este mecanismo de comunicac¸˜ao, ´e simples enviar e receber dados de m´aquinas/processos separados do sistema. Com isso, o sistema se torna escalon´avel `a criac¸˜ao de novos m´odulos externos.
2.6
Interface Web
Depois que os dados s˜ao adquiridos pelos sensores e pr´e-processados, eles s˜ao dis-ponibilizados `as comunidades de usu´arios por meio da rede mundial de computadores, a Internet. Esse processo se utiliza de algumas ferramentas e linguagens necess´arias para a criac¸˜ao do servidor de dados e da tela de interac¸˜ao com o usu´ario.
2.6.1
Servlet
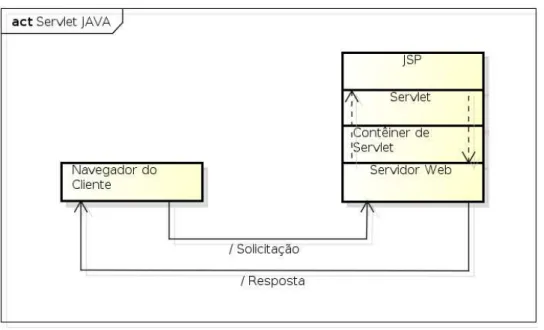
A tecnologiaServletJava fornece um paradigma baseado em solicitac¸˜oes e respostas HTTP em servidores web [Qian et al. 2010]. Basicamente, osServletspodem lidar com solicitac¸˜oes gen´ericas de servic¸os e respondem `as solicitac¸˜oes de um cliente. Afigura 2.7 mostra o funcionamento b´asico de umservletJava.
Figura 2.7: Funcionamento B´asico de um Servlet.
ao desenvolver Web gerar p´aginas est´aticas e dinˆamicas com c´odigos Java adicional em-butidos.
Este projeto utilizou-se dessas ferramentas para a criac¸˜ao do servidor web e de uma p´agina dinˆamica, acess´ıvel pelo usu´ario, para a visualizac¸˜ao dos dados dos sensores e aquisic¸˜ao de dados armazenados em banco de dados.
2.6.2
AJAX
Com a utilizac¸˜ao do servlet, mostrado anteriormente, ´e poss´ıvel criar p´aginas de acesso dinˆamico para o usu´ario. No caso do sistema proposto, essa p´agina fornece gr´aficos, com atualizac¸˜ao em tempo real, dos dados adquiridos pelos sensores. Para que o sistema funcione como desejado, uma ferramenta adicional foi utilizada: o Ajax.
O Ajax ´e acrˆonimo para Asynchronous JavaScript and XML e consiste em um grupo de pad˜ores e t´ecnicas que permitem aos aplicativos no ambiente do cliente repassar dados para aplicativos no ambiente do servidor sem necessitar de atualizac¸˜ao ou recarregamento da p´agina [Rutter 2009]. Para isso, o Ajax cria umfluxo de dados em segundo plano, sem interrupc¸˜ao, por isso o termo ass´ıncrono.
2.7. BANCO DE DADOS: MYSQL COMO FERRAMENTA DE PERSIST ˆENCIA 17
2.7
Banco de Dados: MySQL como Ferramenta de
Per-sistˆencia
Dada a importˆancia do armazenamento dos dados dos sensores para poss´ıveis an´alises posteriores ou at´e para garantir a aquisic¸˜ao dos dados mesmo que seja perdida a comunicac¸˜ao com o servidor, um m´odulo de persistˆencia foi inserido ao sistema. Esse m´odulo utiliza-se da tecnologia MySQL.
O MySQL ´e um sistema de gerenciamento de banco de dados relacional de c´odigo aberto que utiliza a linguagem SQL (Structure Query Language - Linguagem de consulta estruturada) que ´e a linguagem mais utilizada para inserc¸˜ao, acesso e gerenciamento de dados armazenados em um banco de dados. Atrav´es de acessos e consultas ao banco, ´e poss´ıvel armazenar dados e, posteriormente, acess´a-los de forma simples.
2.8
Multiprogramac¸˜ao
O conceito de multiprogramac¸˜ao ´e importante para o desenvolvimento deste sistema, dado que este se apresenta como uma aplicac¸˜ao com v´arias tarefas simultˆaneas. Para tal, ´e necess´ario utilizar bem os rescursos dispon´ıveis pelo computador embarcado e, com isso, garantir a transmiss˜ao de dados de uma forma r´apida e sem perdas de desempenho. Neste sentido, utiliza-se o conceito dethreadspara melhor utilizac¸˜ao desses recursos.
O conceito de threadsest´a associado diretamente aos processos de m´ultiplosfluxos, onde, a partir da utilizac¸˜ao dasthreads, diminui-se ooverheadde gerˆencia e de mudanc¸a de contexto. Dessa forma, um ´unico processo pode ser executado utlizando v´ariasthreads
de modo a paralelizar o funcionamento do algoritmo.
Cap´
ı
tulo 3
Estado da Arte
Alguns projetos de monitoramento da qualidade da ´agua e de veleiros rob´oticos autˆonomos s˜ao apresentados a seguir de uma forma resumida, apenas para o conhecimento do leitor. Estes projetos serviram como base e como meio comparativo para o sistema proposto.
3.1
Sistemas de An´alise da ´
Agua
Conhecidos como RTRM (Real Time Remote Monitoring), esses sistemas se apre-sentam como soluc¸˜oes interessantes para a aquisic¸˜ao remota de dados relativos a quali-dade da ´agua. O desenvolvimento do setor tecnol´ogico permitiu avanc¸os nas ´areas de comunicac¸˜ao de redes e foi fundamental para o projeto e construc¸˜ao desses sistemas de monitoramento [Glasgow et al. 2009]. Alguns projetos, programas e departamentos que estudam e aplicam conhecimentos na ´area de RTRM voltadas para an´alise da qualidade da ´agua serviram como base para a construc¸˜ao do sistema.
O NEMRP - Neuse Estuary Monitoring and Research Program [NEMRP 2015]-mant´em uma rede de 18 estac¸˜oes e de 4 a 10 plataformas autˆonomas de monitoramento remoto em tempo real e fornece os dados obtidos para pesquisadores e aplicac¸˜oes educa-cionais. Essas estac¸˜oes s˜ao montadas de forma estrat´egica no rio Neuse. O resultado deste programa ´e um sistema baseado em web que armazena dados. Outro departamento que analisa dados relativos `a qualidade da ´agua ´e o DNREC - Delaware Departament of Na-tural Resources and Environmental Control [DNREC 2015]. Desenvolvido em parceria com a Universidade de Delaware(College of Enginnering, Newark), a DNREC desenvol-veu uma plataforma RTRM completa para an´alise da ´agua. Similar ao NEMRP, o sistema adquire, analisa e disponibiliza dados relativos a qualidade da ´agua em tempo real.
da ´agua oceˆanica. Entre esses dados, pode-se destacar o sensoriamento de temperatura, corrente, condutividade, caracter´ısticas relativas a propriedades ´oticas e quantidade de nitrato. Esse projeto pode ser comparado a boias meteorol´ogicas bastante utilizadas por institutos de pesquisas.
Al´em desses, dois projetos que tem uma maior relac¸˜ao ao sistema devido a sua aplicac¸˜ao s˜ao apresentados de forma mais detalhada.
MARVIN
O MARVIN - MERHABAutonomous Research Vessel[Bendis B. J. 2002] - (Figura 3.1) consiste em um navio autˆonomo utilizado para monitorar a qualidade da ´agua. Esse projeto ´e o que mais se aproxima da arquitetura proposta neste trabalho, j´a que tamb´em utiliza um ve´ıculo mar´ıtimo n˜ao tripulado para o mesmofim.
Figura 3.1: MERHAB Autonomous Research Vesse. [Hanggi 2009]
Carregado de sensores de PH, condutividade, temperatura e turbidez, o MARVIN ´e capaz de fornecer dados de parˆametros biol´ogicos, f´ısicos, qu´ımicos e meteorol´ogicos de v´arios pontos do reservat´orio e envi´a-los, via sat´elite, atrav´es de uma antena `a bordo do navio.
3.2. VELEIROS ROB ´OTICOS AUT ˆONOMOS 21
Mote Marine Laboratory & Aquarium
O Mote Marine Laboratory [MML 2015] ´e um laborat´orio formado por cientistas e ex-ploradores localizado na Fl´orida, nos Estados Unidos. O principal trabalho desenvolvido por este laborat´orio ´e o monitoramento aqu´atico para manutenc¸˜ao da vida marinha.
Entre v´arios projetos j´a desenvolvidos por eles destaca-se um ve´ıculo autˆonomo su-baqu´atico desenvolvido para an´alise de v´arios parˆametros relativos a qualidade da ´agua. O AUV (Autonomous Underwater Vehicle) apresentado na figura 3.2 j´a foi utilizado em pesquisas relacionadas `as classes defitoplanctons e o mapeamento das mar´es vermelhas no Golfo do M´exico. A grande vantagem desse sistema ´e que todo o ve´ıculo est´a sub-merso, podendo distribuir melhor os sensores e atingir ´areas mais profundas. Outro fator interessante ´e que ele ´e capaz de analisar dados que necessitem de aparato laboratorial, permitindo uma an´alise mais precisa dos indicadores de qualidade da ´agua. A an´alise dos dados ´e feita pelos cientistas e pesquisadores do laborat´orio que tˆem acesso ao resultado, n˜ao sendo disponibilizados, automaticamente, para a comunidade de usu´arios.
Figura 3.2: AUV desenvolvido pelo Mote Marine Laboratory. [AUVAC2015]
3.2
Veleiros Rob´oticos Autˆonomos
Dada a aplicac¸˜ao principal do sistema proposto, s˜ao apresentados, tamb´em, alguns trabalhos relacionados a veleiros rob´oticos autˆonomos, incluindo o N-Boat, veleiro que ter´a embarcado o sistema mecatrˆonico de monitoramento da qualidade da ´agua.
r´apido e com boa capacidade de manobra na superf´ıcie da ´agua. O ROBOAT [Stelzer & Pr¨oll 2008], desenvolvido por pesquisadores da INNOC 1, tem aplicac¸˜ao semelhante ao trabalho proposto, no monitoramento ambiental. Ele tem uma estrutura mais simples, por´em com um sistema de controle que permite a autonomia na navegac¸˜ao e na gerac¸˜ao de trajet´oria.
O projeto veleiro rob´otico N-Boat ´e desenvolvido pelo Laborat´orio de Percepc¸˜ao de Rob´otica NatalNet Labs. Esse veleiro ´e projetado para monitoramento de lagos, lagoas, rios e mares, al´em da intenc¸˜ao de competir no desafioMicrotransat2. Tem um sistema de controle robusto j´a em funcionamento e possui autonomia de energia utilizando pain´eis solares. ´E desenvolvido para navegac¸˜ao autˆonoma, sendo assim ideal para o monito-ramento de longo tempo. A primeira vers˜ao do N-Boat utilizou um nautimodelo (Figura 3.3) para a prova de conceito dos trabalhos iniciais, como controle e navegac¸˜ao autˆonoma, e se encontra em total funcionamento ap´os a integrac¸˜ao desses trabalhos [Silva J´unior et al. 2013]. Atualmente, uma nova vers˜ao do N-Boat com 2,4 metros de comprimento (o dobro do tamanho da primeira vers˜ao) est´a sendo constru´ıda para sua utilizac¸˜ao junto ao sistema proposto.
A arquitetura proposta neste trabalho ser´a embarcada no N-Boat de modo a obter medic¸˜oes mais r´apidas e precisas, facilitar o acesso a dados da qualidade da ´agua e pos-sibilitar maior abrangˆencia na ´area de monitoramento. Afigura 3.4 mostra um esboc¸o do mapa de localizac¸˜ao das partes do N-Boat. O sistema ser´a embarcado na posic¸˜ao 8.
Pretende-se unir as principais vantagens da utilizac¸˜ao de veleiros rob´oticos autˆonomos (deslocamento, propuls˜ao do vento, menor gasto de bateria e maior precis˜ao) com os conceitos e sistemas de monitoramento remoto em tempo real de an´alise da ´agua, de modo a obter um sistema automatizado final robusto e completo. Dessa forma, ser´a poss´ıvel alocar um veleiro para o monitoramento de uma lagoa, por exemplo, e receber dados, em tempo real, de forma totalmente autˆonoma, por um per´ıodo de tempo elevado.
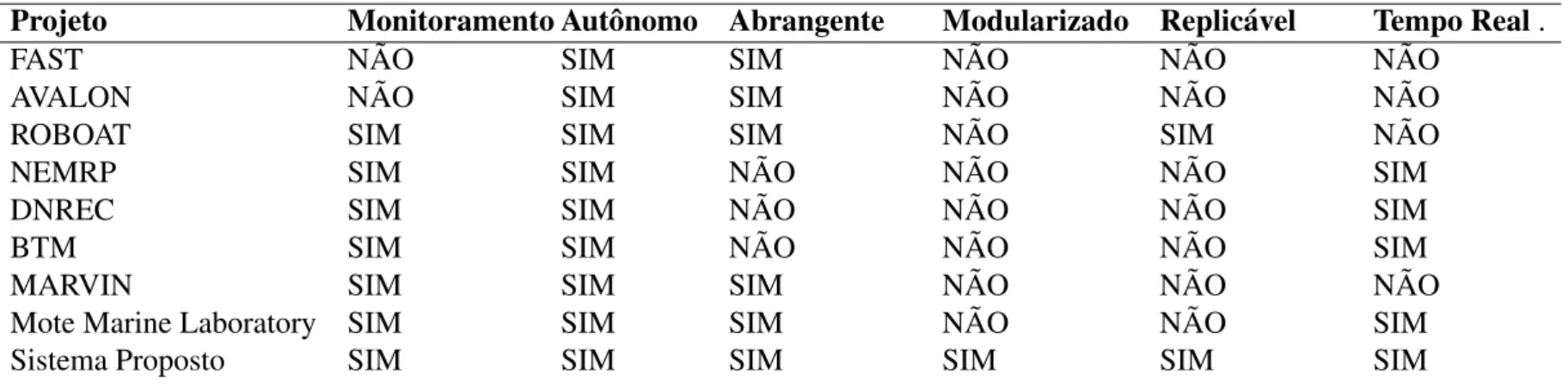
Para se entender e comparar a estrutura e a contribuic¸˜ao que o sistema proposto neste projeto pode oferecer, foi constru´ıda uma tabela (tabela 3.1) com algumas caracter´ısticas importantes no processo de monitoramento e o comparativo entre os trabalhos apresenta-dos neste sec¸˜ao e o proposto.
O significado de cada coluna na tabela ´e apresentado a seguir:
1. Monitoramento - Suporte ao monitoramento da qualidade da ´agua;
1INNOC - Austrian Society for Innovative Computer Science ´e um centro de pesquisa independente
fundado em 2005 e localizado em Vienna, Austria.
2O desafio Microtransat ´e uma corrida de veleiros rob´oticos autˆonomos que tem como principal objetivo
3.2.
VELEIR
OS
R
OB
´OTICOS
A
UT
ˆONOMOS
23
Tabela 3.1: Comparativo entre os projetos apresentados e o proposto.
Projeto Monitoramento Autˆonomo Abrangente Modularizado Replic´avel Tempo Real.
FAST N ˜AO SIM SIM N ˜AO N ˜AO N ˜AO
AVALON N ˜AO SIM SIM N ˜AO N ˜AO N ˜AO
ROBOAT SIM SIM SIM N ˜AO SIM N ˜AO
NEMRP SIM SIM N ˜AO N ˜AO N ˜AO SIM
DNREC SIM SIM N ˜AO N ˜AO N ˜AO SIM
BTM SIM SIM N ˜AO N ˜AO N ˜AO SIM
MARVIN SIM SIM SIM N ˜AO N ˜AO N ˜AO
Mote Marine Laboratory SIM SIM SIM N ˜AO N ˜AO SIM
Figura 3.3: Nautimodelo usado na primeira fase do N-Boat.
2. Autˆonomo - Autonomia na execuc¸˜ao das tarefas, ou seja, sem interferˆencia humana no processo de aquisic¸˜ao dos dados;
3. Abrangente - Capacidade do sistema monitorar uma ´area e n˜ao apenas um ponto espec´ıfico;
4. Modularizado - Inserc¸˜ao ou remoc¸˜ao de sensores que possam modificar ou aumen-tar a quantidade de vari´aveis medidas sem mudanc¸a na arquitetura;
5. Replic´avel - Possibilidade de replicac¸˜ao do sistema, com baixo custo associado; 6. Tempo Real - Capacidade do sistema em enviar dados para a comunidade de usu´arios
logo depois de colet´a-los.
3.2. VELEIROS ROB ´OTICOS AUT ˆONOMOS 25
Cap´
ı
tulo 4
Sistema Proposto
4.1
Problema
A qualidade e quantidade de ´agua dispon´ıvel para o desenvolvimento econˆomico ´e objeto de preocupac¸˜ao de pol´ıticos, de agˆencias ambientais e do p´ublico em geral, j´a que os recursos h´ıdricos tˆem um valor estrat´egico para o desenvolvimento econˆomico e social das nac¸˜oes, para a sustentac¸˜ao da biodiversidade e para a sa´ude humana [Moraes Novo 2007].
Segundo Wetzel (2001), a ´agua do planeta vem sendo explorada e degradada a uma taxa acelerada denominada “crescimento demot´ecnico”. Em outras palavras, consiste na forma de crescimento que re´une o efeito combinado do aumento populacional e da ampliac¸˜ao crescente de produc¸˜ao e consumo de ´agua para atender ao avanc¸o tecnol´ogico e ao crescimento econˆomico.
Diante dessas situac¸˜oes, a necessidade de monitoramento da quantidade e qualidade da ´agua se torna um objeto de fundamental importˆancia para se evitar problemas mais graves no futuro. Segundo Moraes Novo (2007), apesar de sistemas remotos de sensori-amento j´a estarem dispon´ıveis, estes s˜ao pouco utilizados. Uma das explicac¸˜oes seria a existˆencia de um lapso de tempo entre a gerac¸˜ao dos dados e sua liberac¸˜ao para a comuni-dade de usu´arios. Outro ponto que explicaria a n˜ao utilizac¸˜ao desses sistemas ´e a pequena interac¸˜ao entre a comunidade de usu´arios e os produtores de dados, isso faz com que da-dos que seriam pass´ıveis de se transformar em informac¸˜ao n˜ao sejam utilizados por falta de compreens˜ao das necessidades m´utuas: quais dados disponibilizar e/ou como extrair conhecimento, a partir desses dados, para ser aplicado em uma determinada situac¸˜ao.
que mudar o posicionamento do sistema, de forma manual, se desejar abranger toda a ´area de estudo. Al´em disso, sendo esses sistemas pontuais, suas escalabilidades n˜ao s˜ao muitas vezes vi´aveis devido aos custos relativamente altos para a produc¸˜ao de um ´unico equipamento.
4.2
Proposta
Diante dos problemas expostos anteriormente e utilizando-se do conceito de multi´area da mecatrˆonica, prop˜oe-se a criac¸˜ao de um sistema de monitoramento da qualidade da ´agua, em tempo real, ajust´avel, que possa ser embarcado em um veleiro rob´otico autˆonomo e disponibilizar dados `as comunidades de usu´arios por meio da Internet.
Dessa forma, ser´a poss´ıvel, utilizando-se da capacidade de deslocamento do veleiro, do sensoriamento e publicac¸˜ao dos dados e da possibilidade de adaptac¸˜ao do sistema de acordo com as necessidades locais- monitorar maiores regi˜oes aqu´aticas de forma r´apida, diminuindo o lapso entre a coleta e a disponibilidade dos dados, e atuar diretamente em uma situac¸˜ao espec´ıfica que necessite de monitoramento aqu´atico.
Para isso, uma arquitetura de hardware e software foi constru´ıda, de forma a viabilizar o desenvolvimento deste projeto e atuar nos problemas j´a apresentados.
4.2.1
Arquitetura de Hardware do Sistema
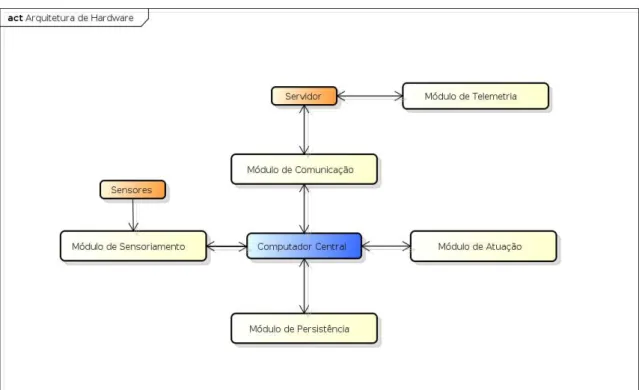
A arquitetura de hardware foi dividida em 5 (cinco) m´odulos: sensoriamento, comunicac¸˜ao, persistˆencia, atuac¸˜ao e telemetria. Al´em disso, apresenta um computador central e um ser-vidor para a disponibilidade dos dados. Afigura 4.1 mostra a arquitetura de hardware de alto n´ıvel.
Cada parte da arquitetura de hardware ´e discutida em seguida, discutindo a func¸˜ao que cada uma realiza, como est´a estruturada e como se comunica com os outros componentes.
Computador Central
4.2. PROPOSTA 29
Figura 4.1: Arquitetura de Hardware de Alto N´ıvel.
Figura 4.2: Placa Raspberry Pi - Modelo B.
Nessa arquitetura, o RPi ´e o respons´avel por controlar todo o sistema, atrav´es de um software de alto n´ıvel, permitindo uma organizac¸˜ao estrutural para o bom funcionamento das partes e componentes envolvidos nessa arquitetura.
O RPi j´a tem suporte a comunicac¸˜ao SPI e a I2C. A tabela 4.1 mostra o mapeamento para o SPI e a tabela 4.2 o mapeamento para o I2C.
Tabela 4.1: Mapeamento dos Pinos do Raspberry para comunicac¸˜ao SPI
Pino SPI Pino RPi
SCLK 23 MISO 21 MOSI 19 SS 24.
Tabela 4.2: Mapeamento dos Pinos do Raspberry para comunicac¸˜ao I2C
Pino I2C Pino RPi
SDA 27 SCL 28.
Figura 4.3: CI DS1307.
Um fator importante que foi levado em considerac¸˜ao no desenvolvimento da arqui-tetura de hardware ´e que o Raspberry n˜ao disp˜oe de um rel´ogio em tempo real. Ou seja, seria complicado desevolver um sistema em tempo real sem a disponibilidade desse rel´ogio. Para contornar esse problema, foi adicionado um CI DS1307 (Figura 4.3) e uma pilha CR2032 para marcar o tempo do rel´ogio somente quando o sistema estiver desli-gado. Este CI se comunica sobre o protocolo I2C.
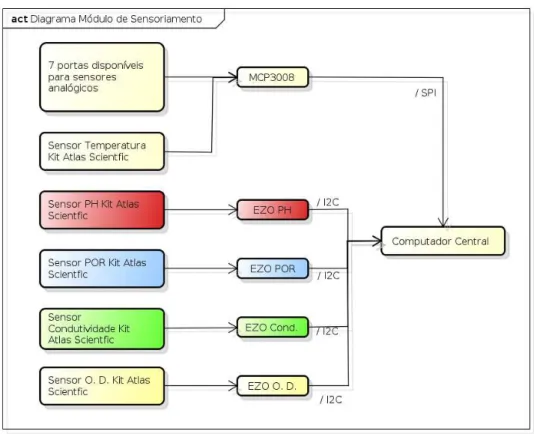
M´odulo de Sensoriamento
Esse m´odulo ´e utilizado para adquirir os dados dos sensores e envi´a-los para a uni-dade de processamento (computador central). Ele oferece suporte a 7 sensores anal´ogicos (dado que o sensor de temperatura do kit ´e anal´ogico e ocupa uma das portas do conver-sor) e aos sensores do kit da Atlas Scientific que s˜ao utilizados para o monitoramento da qualidade da ´agua.
blo-4.2. PROPOSTA 31 cos.
Os dois tipos de protocolos de comunicac¸˜ao apresentados na sec¸˜ao 2 s˜ao utilizados. Sobre o SPI, existe a comunicac¸˜ao entre o conversor A/D e o computador central. Sobre o protocolo I2C, a comunicac¸˜ao acontece entre o EZOTM e o computador central.
Figura 4.4: Arquitetura de Hardware - M´odulo de Sensoriamento.
O MCP3008 (Figura 4.5) ´e um conversor anal´ogico-digital com sa´ıda SPI. Ele suporta 8 canais anal´ogicos de entrada e ´e controlado diretamente pelo mestre da comunicac¸˜ao SPI.
Os sensores do kit da Atlas Scientific s˜ao robustos e, utilizando-se dos EZOs, se torna um sistema de condicionamento de sinal completo, j´a que permitem a calibrac¸˜ao e compensac¸˜ao de valores para o ajuste do sinal recebido. As caracter´ısticas de cada sensor s˜ao apresentadas adiante, juntamente com algumas das equac¸˜oes matem´aticas dis-ponibilizadas pelo fabricante [Atlas Scientific 2015] que transformam o sinal anal´ogico em sinal de unidade representativa nos EZOs.
Sensor de Temperatura As caracter´ısticas do sensor de temperatura s˜ao:
Figura 4.5: Conversor A/D com sa´ıda SPI - MCP3008.
• Resoluc¸˜ao: 1o;
• Tens˜ao de Operac¸˜ao: 3.3V a 5V;
Figura 4.6: Sensor de Temperatura.
Esse sensor (Figura 4.6) ´e o ´unico do kit da Atlas Scientific que n˜ao tem EZO para condicionamento do sinal. Com isso, ele ´e conectado ao ADC mostrado anteriormente, recebendo valores que variam de 0 a 1024. Para que seja poss´ıvel utiliz´a-lo e convertˆe-lo para vaconvertˆe-lores em unidade de temperatura, s˜ao realizadas as seguintes operac¸˜oes em software:
vout=valorADC∗0.0048∗1000; (4.1)
Ondevout ´e o valor da tens˜ao de sa´ıda e ovalorADC ´e o resultado da convers˜ao do ADC.
4.2. PROPOSTA 33
Figura 4.7: Sensor, EZO e substˆancia de calibrac¸˜ao - pH.
convertido de volts para milivolts. Por fim, para encontrar a temperatura, utiliza-se a seguinte equac¸˜ao:
T =0.0512∗vout−20.5128; (4.2)
Onde T ´e a temperetura emoC.
Sensor e EZO de pH As caracter´ısticas do sensor de pH e do EZO (Figura 6.5) corres-pondente s˜ao:
• Range: 0.01 at´e 14; • Resoluc¸˜ao: 0,02;
• Tens˜ao de Operac¸˜ao: 3.3V a 5V; • Leitura independente da temperatura; • Formato do dado ASCII
• Protocolos de Comunicac¸˜ao: UART e I2C.
O circuito do pH EZO converte a corrente gerada pela atividade de ´ıons de hidrogˆenio em pH. A corrente que ´e gerada ´e o rec´ıproco da atividade e pode ser obtida utilizando a seguinte equac¸˜ao:
E=E0−2.303RT
F pH (4.3)
Figura 4.8: Sensor, EZO e substˆancia de calibrac¸˜ao - POR.
Na calibrac¸˜ao do pH utiliza-se de 3 substˆancias com valor de pH conhecido: o valor 7, que corresponde a neutralidade da substˆancia; o valor 10, que ajusta os valores de meio b´asico; e o valor 4, que ajusta os valores de meio ´acido. Al´em disso, ´e poss´ıvel inserir a compensac¸˜ao de temperatura. O valor padr˜ao ´e de 25C◦.
Sensor e EZO de POR As caracter´ısticas do sensor de POR e do EZO (Figura 4.8) correspondente s˜ao:
• Range: -1019.9mV a +1019.9mV; • Resoluc¸˜ao: 1mV;
• Tens˜ao de Operac¸˜ao: 3.3V a 5V; • Formato do dado: ASCII;
• Protocolos de Comunicac¸˜ao: UART e I2C.
A medic¸˜ao de POR ´e complexa e n˜ao ´e apresentada pelo fabricante. ´E interessante ressaltar que, segundo o fabricante, pequenas variac¸˜oes de composic¸˜ao do material do sensor, interferˆencia de produtos orgˆanicos e camadas de ´oxidos monomoleculares variam o resultado, de modo que, mesmo que dois sensores de POR estejam medindo a mesma substˆancia, ´e bem prov´avel que os dois n˜ao dar˜ao o mesmo resultado.
No processo de calibrac¸˜ao, ´e utilizado apenas o valor de 225mV como padr˜ao.
Sensor e EZO de Condutividade As caracter´ısticas do sensor de condutividade e o EZO (Figura 6.6) correspondente s˜ao:
• Range: 0.07µS a 500.000µS; • Resoluc¸˜ao: 2µS ;
4.2. PROPOSTA 35
Figura 4.9: Sensor, EZO e substˆancia de calibrac¸˜ao - Condutividade.
• Formato do dado ASCII
• Protocolos de Comunicac¸˜ao: UART e I2C.
O EZO deste sensor utiliza um circuito que faz uma convoluc¸˜ao dos sinais de entrada para que seja poss´ıvel calcular a sa´ıda. Basicamente, o dispositivo emite uma pequena descarga el´etrica que ´e capturada por um sensor e ent˜ao ´e verificado a tens˜ao de sa´ıda. Outro ponto importante ´e que, como visto no contexto te´orico deste trabalho, a salinidade pode ser obtida a partir da condutividade, e o EZO de POR j´a retorna o valor da salinidade, assim como s´olidos dissolvidos e gravidade espec´ıfica da ´agua, valores que podem ser utilizados em trabalhos futuros.
Assim como no processo de calibrac¸˜ao do pH, na condutividade, a calibrac¸˜ao ´e feita utilizando-se de mais de uma substˆancia de referˆencia. O valor baixo correponde a 12.880µS e valor alto a 85.000µS. Para este sensor, tamb´em ´e poss´ıvel fazer compensac¸˜ao de temperatura.
Sensor e EZO de Oxigˆenio Dissolvido (O.D.) As caracter´ısticas do sensor de O.D. e o EZO (Figura 4.10) correspondente s˜ao:
• Range: 0.01 a 35.99 mg/L; • Resoluc¸˜ao: 0,02 mg/L;
Figura 4.10: Sensor, EZO e substˆancia de calibrac¸˜ao - O.D.
• Protocolos de Comunicac¸˜ao: UART e I2C.
O EZO de O.D. ´e um dispositivo que leva em considerac¸˜ao a temperatura, a salinidade e a press˜ao para encontrar a concetrac¸˜ao de oxigˆenio dissolvido na ´agua. Para determinar essa concentrac¸˜ao, segue a seguinte equac¸˜ao:
%saturacao=
mV naAgua
mV noar x100 (4.4)
Ou seja, o valor da saturac¸˜ao ´e igual ao valor de tens˜ao do sensor na ´agua divido pelo valor do mesmo no ar. Os parˆametros de temperatura, salinidade e press˜ao s˜ao ajustados no momento da calibrac¸˜ao. Por padr˜ao, o sensor ´e ajustado para uma temperatura de 20oC, com uma variac¸˜ao de 3 a 5 graus. No caso da salinidade, se a condutividade for menor 2.500 µS pode-se desconsiderar o ajuste. Caso seja constante, a salinidade ´e atribu´ıda apenas uma vez, e, no caso de ter pequenas variac¸˜oes, tamb´em pode ser desconsiderado. Para a press˜ao, o padr˜ao ´e considerar que o sensor esteja sendo usado pr´oximo a press˜ao atmosf´erica a n´ıvel do mar. Essas configurac¸˜oes s˜ao armazenadas em circuitos integrados EEPROM e n˜ao se perdem caso sejam desligados.
Na calibrac¸˜ao, utiliza-se o valor de 0mg/L como padr˜ao conhecido. Al´em disso, a calibrac¸˜ao tamb´em considera o valor do n´ıvel de oxigˆenio da atmosfera. Dessa forma, ´e poss´ıvel encontrar o valor da saturac¸˜ao atrav´es da f´ormula anterior.
M´odulo de Acionamento
4.2. PROPOSTA 37 em pontos especificados, com o veleiro na posic¸˜ao pr´e-determinada, o computador cen-tral envia um sinal, que faz com os sensores sejam colocados na ´agua. Ap´os a coleta dos dados, a partir de um tempo definido, os sensores s˜ao retirados e o veleiro pode seguir para outro ponto.
Figura 4.11: Microcontrolador AtMega.
Para o funcionamento deste m´odulo ´e utilizado o microcontrolador AtMega (Figura 4.11).O AtMega ´e respons´avel por comunicar-se com o computador central, via protocolo I2C, e acionar um servo-motor que, conectado a um carretel, faz os sensores baixarem ou levantarem segundo os comandos recebidos. Afigura 4.12 mostra um esboc¸o deste sistema de acionamento.
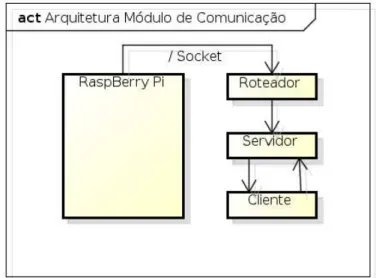
M´odulo de Comunicac¸˜ao
O m´odulo de comunicac¸˜ao ´e respons´avel por disponibilizar os dados adquiridos dos sensores para o servidor. Para validac¸˜ao do sistema, est´a sendo utilizado apenas a tec-nologia WiFi. Deseja-se posteriomente, adicionar outras tectec-nologias, como 3g e sat´elite, para que seja poss´ıvel acessar o sistema de qualquer lugar.
Com o intuito de criar uma rede interna para acesso remoto, est´a sendo utilizado um roteador Wifi comum no sistema, para transmitir e receber dados do servidor. Isto ´e necess´ario para que seja poss´ıvel acessa-lo a partir do IP est´atico atribuido ao Raspberry. Afigura 4.13 apresenta a arquitetura b´asica em blocos deste m´odulo.
Figura 4.13: Arquitetura de Hardware - M´odulo de Comunicac¸˜ao.
M´odulo de Persistˆencia
O m´odulo de persitˆencia, consiste em uma camada existente no pr´oprio computador central e em um servidor externo que utilizar´a o MySQL para armazenamento de dados. Esse m´odulo ´e de fundamental importˆancia, visto que, caso ocorra algum problema no sistema de comunicac¸˜ao, os dados n˜ao ser˜ao perdidos, permanecendo em mem´oria por um determinado per´ıodo de tempo. Al´em disso, possibilita ao usu´ario visualizar dados que n˜ao est˜ao sendo mostrados nos gr´aficos de tempo real no momento da requisic¸˜ao.
M´odulo de Telemetria
4.2. PROPOSTA 39 de comunicac¸˜ao, e a pr´opria interface web.
O servidor Web ´e umservlet Java rodando no pr´oprio Raspberry. Esse servidor per-mite a comunicac¸˜ao com o Raspberry a partir de comunicac¸˜ao socket. Dessa forma, ´e poss´ıvel receber os dados dos sensores adquiridos no m´odulo de sensoriamento e envi´a-los, a partir de requisic¸˜oes Ajax, atrav´es da p´agina dinˆamica JSP.
A p´agina JSP apresenta os dados dos sensores em tempo real a partir de gr´aficos que se atualizam automaticamente a medida que novos dados s˜ao recebidos. Al´em disso, o sistema possibilita, a partir de normas definidas por ´org˜aos gestores, verificar a qualidade do parˆametro em tempo real. Por exemplo, segundo o CONAMA (1986), o valor do pH da ´agua pot´avel precisa est´a numa faixa entre 6 e 9. A partir dessa informac¸˜ao, o sistema verifica os dados e apresenta na tela se est´a ou n˜ao dentro desses valores.
Afigura 4.14 mostra o diagrama do sistema completo com os correspondentes proto-colos de comunicac¸˜ao.
4.2.2
Arquitetura de Software do Sistema
Assim, como para um bom funcionamento de um sistema mecatrˆonico ´e necess´aria uma arquitetura de hardware bem definida, como apresentado na sec¸˜ao anterior, tamb´em ´e necess´ario definir uma arquitetura de software que fac¸a com que os componentes de hardware interajam entre si, fazendo com que o sistema funcione como o esperado.
Nesse sistema, s˜ao necess´arios dois programas principais: um ´e embarcado no Rasp-berry e tem a func¸˜ao de ler os dados dos sensores, process´a-los caso necess´ario e envi´a-los para o servidor remoto; j´a o outro ´e justamente o processo no servidor, que ir´a receber os dados enviados do outro processo e gerenciar as solicitac¸˜oes da interface do cliente.
Processo embarcado no Sistema
O processo embarcado no sistema precisa ser capaz de receber, processar e enviar os dados dos sensores sem interferir no procesamento em tempo real do sistema. Para isso, foi projetada uma arquitetura que possibilitasse ao sistema funcionar, adaptando-se a algumas caracter´ısticas dos sensores, como a necessidade de espera de 1 segundo para o tempo de resposta dos EZOs. Al´em disso, este tamb´em deve ser capaz de acionar o sistema mecˆanico, inserindo e retirando os sensores da ´agua. A figura 4.15 mostra a arquitetura projetada.
finaliza a execuc¸˜ao ´e inicializada athreadde aquisic¸˜ao de dados dos sensores. O programa principal fica aguardando a finalizac¸˜ao da thread ou algum comando de finalizac¸˜ao do sistema. Depois de adquiridos, os dados s˜ao armazenados no banco de dados e enviados via socket para o servidor. O socket ´e fechado e o processo recomec¸a at´e sua parada ser forc¸ada.
Processo do Servidor
O processo do servidor precisa receber os dados enviados do processo embarcado no sistema, identificar de qual sensor correponde aquele dado e armazen´a-los em uma vari´avel para posteriormente serem enviados para a interface web. Ao mesmo tempo, esse processo precisa gerenciar as solicitac¸˜oes do cliente, enviando os dados requeridos e apresentando-os na tela. A figura 4.16 mostra esse funcionamento com diagrama de blocos.
4.2. PROPOSTA 41
4.2. PROPOSTA 43
Cap´
ı
tulo 5
Implementac¸˜oes
Neste cap´ıtulo, s˜ao apresentadas as definic¸˜oes, processos e implementac¸˜oes realizados para a construc¸˜ao do sistema mecatrˆonico proposto. Para uma melhor compreens˜ao - e relacionando com o pr´oprio conceito de mecatrˆonica - este cap´ıtulo foi dividido nas trˆes ´areas de atuac¸˜ao: mecˆanica, eletrˆonica e computac¸˜ao.
5.1
Construc¸˜ao Mecˆanica
No caso da construc¸˜ao mecˆanica, duas partes principais foram necess´arias. A pri-meira diz respeito `a estrutura mecˆanica que comporta o sistema eletrˆonico. O segundo consiste em um simples sistema de acionamento mecˆanico para inserir e retirar os sen-sores da ´agua, visto que a aplicac¸˜ao principal, como mostrado no in´ıcio deste trabalho, ´e a utilizac¸˜ao com um veleiro rob´otico autˆonomo. Dessa forma, quando o veleiro estiver em movimento, ´e necess´ario que os sensores sejam retirados da ´agua para que n˜ao sofram com o arrasto provocado pelo deslocamento do barco.
5.1.1
Estrutura Mecˆanica do Sistema Eletrˆonico
Para a estrutura mecˆanica do sistema eletrˆonico, foi utilizado uma caixa com tampa de acr´ılico fechada com parafusos afim de n˜ao permitir que o circuito el´etrico pudesse ter contato com a ´agua.
Para adaptar a caixa `a estrutura do sistema, foram realizados alguns desbastes, para que os sensores pudessem ser inseridos sem a necessidade de que esta fosse aberta. Al´em disso, tamb´em foram feitos furos para passagem dos fios de acionamento do motor. A
Figura 5.1: Caixa de acr´ılico modificada.
5.1.2
Sistema de Acionamento para Inserc¸˜ao e Remoc¸˜ao dos
Senso-res da ´
Agua
Um esboc¸o do sistema de acionamento usado para inserc¸˜ao e remoc¸˜ao dos sensores da ´agua foi apresentado no cap´ıtulo 4. Baseando-se naquele esboc¸o, foi constru´ıda uma estrutura de madeira (Figura 5.2) que suportasse o sistema mecatrˆonico criado.
Figura 5.2: Estrutura parafixac¸˜ao dos componentes do acionamento mecˆanico. Na ponta da haste de madeira, foi colocado o servo motor juntamente com o carretel e uma guia foi adicionada para impedir que os sensoresfiquem em balanc¸o constante. A
5.2. IMPLEMENTAC¸ ˜AO ELETR ˆONICA 47
Figura 5.3: Estrutura Mecˆanica Completa.
5.2
Implementac¸˜ao Eletrˆonica
O primeiro passo na construc¸˜ao eletrˆonica foi desenvolver o projeto da placa que contemplasse todos os parˆametros necess´arios para o funcionamento do sistema. Para facilitar o projeto, foram feitas, separadamente, cada parte que comp˜oe o projetofinal.
5.2.1
Projeto de Funcionamento do MCP3008
As ligac¸˜oes referentes ao conversor anal´ogico digital s˜ao simples. Um ponto impor-tante que foi considerado na construc¸˜ao desse projeto ´e que qualquer variac¸˜ao nas entradas do MCP3008 gera valores diferentes de zero, mesmo que n˜ao exista sensores conectados a ele. Isso representa um problema na identificac¸˜ao de quais sensores est˜ao conectados e precisam ser levados em considerac¸˜ao para adquirir os dados e envi´a-los a interface Web. Para contornar este problema, foi inserido um resistor de 100 mega ohms entre o canal e o terra. Esse m´etodo ´e conhecido como resistores pull-down, j´a que a entrada ´e forc¸ada a zero at´e que um sinal seja realmente inserido na entrada do conversor. Afigura 5.4 mostra o esquem´atico para o MCP3008.
Os componentes utilizados s˜ao:
• 8 bornes de 3 entradas - Utilizado para facilitar a inserc¸˜ao de sensores;
• 8 resistores de 10k - Utilizado para o pull-down como mencionado anteriormente; • 1 MCP3008
![Tabela 2.1: Parˆametros e pesos do IQA [ANA 2015].](https://thumb-eu.123doks.com/thumbv2/123dok_br/15649063.112302/26.892.117.729.563.831/tabela-parˆametros-e-pesos-do-iqa-ana.webp)
![Figura 2.1: Gr´aficos de Qualidade em func¸˜ao de sua Concentrac¸˜ao ou Medida [ANA 2015].](https://thumb-eu.123doks.com/thumbv2/123dok_br/15649063.112302/27.892.201.736.172.866/figura-gr-aficos-qualidade-func-concentrac-medida-ana.webp)