ADAPTIVE FILTER FOR SYSTEM
IDENTIFICATION USING QUANTIZATION
SCHEMES
Nitesh Mudgal
1, Pankaj Shukla
2, R.S.Meena
31
(M.Tech Scholar)
Electronics Engineering Department, UCE, Rajasthan Technical University, Kota (Rajasthan)- India (91-9530094511; fax: +91-744-2473040;
E-mail: [email protected].
2
Associate Professor
Electronics Engineering Department, UCE, Rajasthan Technical University, Kota (Raj.)-India
E-mail: [email protected]
Abstract-
The Least Mean Square (LMS) Algorithm finds its application in System identification due to its simplicity.Reduction of the complexity of Adaptive Finite Impulse Response(FIR) filter had received attention in the area of adative filter. This paper proposes methods of system identification using adaptive filter which are based on a Quantised version of the LMS, namely the Clipped Least Mean Square (CLMS) and Modified Clipped Least Mean Square( QX-LMS) algorithms. In both Algorithms coefficients of the adaptive filter are adjusted automatically by an adaptive algorithm based on the input signals. This property makes the adaptive filter has an important application in system identification.the Quantized version of Least Mean Square Algorithm increases covergence property as compared to normal Least Mean Square Algorithm.
Keywords —Adaptive Filter, Sign function, Least Mean Sqaure.
I. INTRODUCTION
Adaptive filters are best used in cases where signal conditions or system parameters are slowly changing and the filter is to be adjusted to compensate for this change.The least mean squares (LMS) criterion is a search algorithm that can be used to provide the strategy for adjusting the filter coefficients. Simplicity of Least Mean Square (LMS) makes its useful Apllication in System Identification of Adaptive Filter.The convergence rate of Least Mean Square (LMS) Algorithm is slow to Identify the System.The Quantization Version of Least Mean Square (LMS) which is variant of normal LMS can find its application in system identification.In system Identification these quantized version can provide fast convergenge rate as copmared to normal LMS.
II. SYSTEM IDENTIFICATION
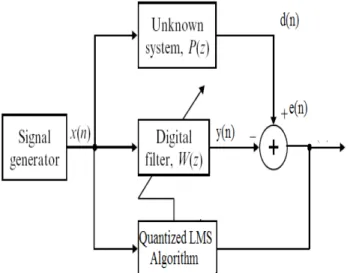
A Practical Approach for modeling a Plant or Process is the system Identification.The signal produced by the system is used to construct the model as shown in figure 1 Below, Where input
x n
( )
are same for both UnknownSystem
P z
( )
and Digital FilterW z
( )
.Errore n
( )
is the difference between Unknown System outputd n
( )
andFigure 1. Block Diagram for System Identification
by adjusting the coefficients of digital filter ,we can minimize the error difference between Unknown system output and Digital Filter output. Digital filter can be either Finite Impulse Filter (FIR) or Infinite Impulse Response (IIR).
Adaptive System Identification is frequently used in control system, communication system and signal processing.
III. CLIPPED LMS AND MODIFIED CLIPPED LMS
The LMS algorithm is a linear adaptive filtering algorithm can be given as,
(
1)
( )
( ) ( )
w n
+ =
w n
+
µ
e n x n
Where,
Error
e n
( )
=
d n
( )
−
y n
( )
Output
( )
h( ) ( )
y n
=
w n x n
and
d n
( )
is the desired output signal, the parameterµ
(step size) determine the rate of convergence.Here Modification of Least Mean Square namely Clipped Least Mean Square (CLMS) as two level Quantiztion and further modification of CLMS, three level Quantization as Modified Clipped (QX-LMS) are proposed, Here, both quantization schemes CLMS and QX-LMS are briefly introduced one by one.
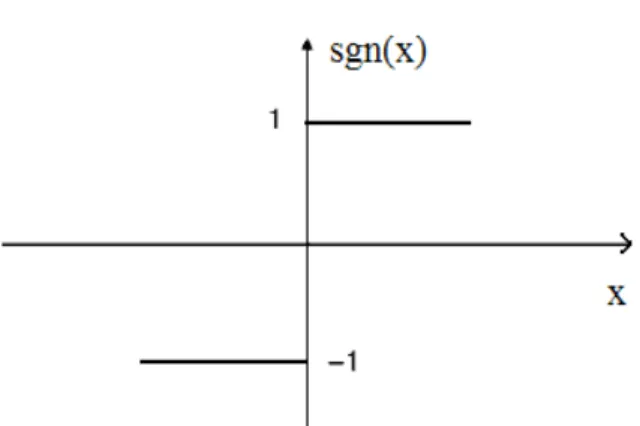
1) clipped LMS(CLMS)
Figure 2. Two levels quantized sceme for Clipped LMS
For this two levels Quantization Scheme , Adaptive LMS algorithm can be written as,
%
(
1)
( )
( ) ( )
w n
+ =
w n
+
µ
e n x n
Where
x n
%
( )
is the two levels Quantized input signal, shown as sign function defined as,+1, ( )
0
( )
-1, ( )
0
x i
sgn x
x i
>
=
<
2) . Modified Clipped LMS(QX-LMS)
Modified Clipped LMS (QX-LMS) is further modification of Clipped LMS(CLMS), in which input signal
( )
x n
was quantized into three levels, The three levels quantized version of input signal for QX-LMS is shown in figure 3 below,Figure 3. Three levels quantized scheme for Modified Clipped LMS For this three level Quantization Scheme , Adaptive LMS algorithm can be written as,
$
(
1)
( )
( ) ( )
w n
+ =
w n
+
µ
e n x n
+1, ( )
( )
0, - < ( )<
-1, ( )
x i
msgn x
x i
x i
δ
δ
δ
δ
≥
=
≤ −
IV. IMPLIMENTATION AND RESULT
To show the effect of quantization version of LMS, a high pass FIR filter is designed with MATLAB,which has order of 25 and cut-off frequency of 0.48, here normally distributed random number are taken as input for both adaptive filter and fixed FIR filter. Figure 4 shows the error estimation using Clipped LMS which is the difference between desired response and output response.
0 50 100 150 200 250 300 350 400 450 500 -2
-1.5 -1 -0.5 0 0.5 1 1.5 2
System output
Samples
T
ru
e
a
n
d
e
s
ti
m
a
te
d
o
u
tp
u
t
Desired Output Error
Figure 4. Error estimation using CLMS.
0 5 10 15 20 25 -0.4
-0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6
coefficient
c
o
e
ff
ic
ie
n
t
v
a
lu
e
Comparison of the actual weights and the estimated weights
Actual weights Estimated weights
Figure 5. Weight estimation using CLMS
0 50 100 150 200 250 300 350 400 450 500 -2
-1.5 -1 -0.5 0 0.5 1 1.5 2
System output
Samples
T
ru
e
a
n
d
e
s
ti
m
a
te
d
o
u
tp
u
t
Desired Output Error
0 5 10 15 20 25 -0.4
-0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6
coefficient
c
o
e
ff
ic
ie
n
t
v
a
lu
e
Comparison of the actual weights and the estimated weights
Actual weights Estimated weights
Figure 7. Weight estimation using QX-LMS
IV. CONCLUSIONS
This paper presents Identification of the System using Quantized versions of LMS namely Clipped least Mean Square (CLMS) and modified Clipped least Mean Square (QX-LMS), which are variant of Least Mean Square(LMS) in two levels quantization and three levels squantization schemes of the input signal respectively, these two method provide the fast convergence of the filter weight as compared to normal Least Mean Square(LMS).
REFRENCES
[1] Xiaochun Guan,Xiaojing Chen,Guichu Wu,QX- LMS Adaptive FIR Filters For SystemIdentification,College of Physics & Electronics Information Engineering, Wenzhou University,Zhejia- ng China, 2009 IEEE. [2] B.Widrow and S. D. Steams,“Adaptive Signal Processing”,China Machine Press, Beijing, May 2008.
[3] Lei Zhang, Jin Bi and Lianying Guo, “The Practical Textbook of MATLAB”,Post & Telecom press, Beijing, December 2008
[4] H. Sadoghi Yazdi, M. Fathy, “Car tracking by uantized input LMS, QX-LMS algorithm in traffic scenes”, IEE Proc.-Vis. Image Signal Process., Vol. 153, No. 1, February 2006,pp. 37-45.
[5] Jun, B.-E., Park, D.-J., and Kim, Y.-W, “Convergence analysis of sign-sign LMS algorithm for adaptive filters with correlated gaussian data”, Proc. ICASSP’95, vol. 2, 1995, pp.1380–1383.