Esola de Engenharia
Programa de Pós-Graduação em Engenharia Elétria
Desenvolvimento de um Sistema de Loalização e
Esola de Engenharia
Programa de Pós-Graduação em Engenharia Elétria
Desenvolvimento de um Sistema de Loalização e
Reonstrução de Trajetórias para um Veíulo Terrestre
Mihelle Mendes Santos
Dissertação apresentada ao Programa de Pós-Graduação em
Engenharia Elétria da Universidade Federal de Minas Gerais
omo requisito parial para obtenção do título de Mestre em
Engenharia Elétria.
Orientadores: Prof. Dr. Leonardo Antnio Borges Trres e
À minha familiae ao Paulo, meu
ompanheiro vinte e ino horas
AgradeçoprimeiramenteaDeuspelaoportunidadedeviveressaexperiêniaintensa
que é a pós-graduação e por ter me dado forças para onluir mais essa etapa de
minha vida. Agradeço ao meu noivo, Paulo, pela paiênia, pelos onselhos, pelo
ompanheirismo, enm, por existir em minha vida. Agradeço aos meus pais pela
ompreensãode minha ausênia em diversos momentos importantes da família.
Agradeçoaos meusorientadores, Professor Leonardo TrreseProfessor
Gui-lherme Pereira, pelos ensinamentos, pela paiênia e pelo apoio e ao Programa de
Pós-Graduaçãoem EngenhariaElétriadaUFMG.AgradeçoaoProfessorPaulo
Is-olddoDepartamentodeEngenhariaMeâniadaUFMG,membrodogrupoPDVA
que partiipou do desenvolvimento deste trabalho. Agradeço aos olegas do
labo-ratório CORO, que me auxiliaram aademiamente em diversos momentos, pelas
onversas de desontração, pelos afés, espeialmente ao Elias, ao Matheus Vinti
eaoGuilhermeCastroquepartiiparamdiretamentedodesenvolvimento deste
tra-balho; aos olegas do PPGEE pelo ompanheirismo na realização de trabalhos e
estudosemgrupo. Agradeçoaos alunosparaosquaistiveoportunidadede leionar,
queontribuírampara minha experiêniadoente.
Agradeço aos demais professores do Departamento de Engenharia Meânia
que disponibilizaram o automóvel utilizado neste trabalho, ao Professor Maros
Timbó do Instituto de Geoiênias e agradeço ao Departamento de Planejamento
A resposta erta, não importa
nada: oessenialéqueas
pergun-tas estejam ertas.
A tarefa de loalizaçãode um robmóvel onstitui-seomo uma das etapas
funda-mentaisparaseatingiroobjetivodeloomoçãoautnomadomesmo,tendoemvista
queum veíulo deve onheersua posiçãogeográa,em relaçãoaum determinado
referenial,paraonseguirsedesviardeobstáulosonheidosealançarlugares
de-sejados. O umprimentodesta tarefa demandaa utilizaçãode informaçõesruidosas
provenientes de diversos tipos de sensores. Neste trabalho tem-se omo objetivo o
estudo de ténias de fusão sensorial apliadas ao desenvolvimento de um sistema
de loalizaçãopara um automóvel de passeio, o qual será futuramente usado omo
plataforma robótia móvel. O sistema desenvolvido provê não apenas informações
aera da posição geográa do veíulo, mas também fornee estimativas de
velo-idade e orientação ao longo do trajeto, graças à utilização de sensores de posição,
veloidade eaeleração, adequadamenteinstaladose alibrados,ujasmediçõessão
proessadas poralgoritmosdeestimaçãobaseadosnoltrodeKalman. Como
exem-plode apliaçãodosistema de loalizaçãoproposto nestetrabalho, foi desenvolvido
umguiaeletrnioembaradoque,emonjuntoom mapasforneidospreviamente,
pode apresentar informações ao motorista que trafega om o veíulo em um dado
The loalizationtask of a mobile robotis one of the most importantsteps towards
itsautonomousloomotion,sineavehilemustknowitsgeographiposition,must
beable toavoidknown obstales and to arriveat desired plaes. The fulllmentof
this task requires the use of noisy information provided by many types of sensors.
In this work the objetive is the study of sensor fusion tehniques applied to the
development of a loalization system for an automobile, wih will be used later
as a mobile roboti platform in UFMG. The developed system not only provides
information onerning the geographi position of the vehile, but also estimates
its speed and orientation. This is aomplished by the use of position, speed and
aeleration sensors, whih are adequately installed and alibrated. The sensors
measurementsareproessedusingestimationalgorithmsbasedontheKalmanlter.
As an example of appliation of the loalizationsystem proposed in this work, an
onboardeletroni guidewasdeveloped, whih,basedonmapspreviously storedon
Lista de Figuras xvi
Lista de Tabelas xxi
1 Introdução 23
1.1 Motivação . . . 23
1.2 Objetivos . . . 25
1.3 Justiativas . . . 26
1.4 Metodologia . . . 28
1.5 Resultados Alançados . . . 30
1.6 Organização doTexto . . . 30
2 Revisão Bibliográa 33 2.1 O ProblemadaLoalização . . . 33
2.1.1 LoalizaçãoRelativa(Dead-Rekoning) . . . 34
2.1.2 LoalizaçãoAbsoluta . . . 36
2.2 Métodos de Fusão Sensorial . . . 39
2.2.1 Filtro de Kalman . . . 40
2.2.2 Filtro de Kalman Estendido . . . 43
2.3 Trabalhos Relaionados. . . 44
2.4 ConsideraçõesFinais . . . 52
3 Metodologia 53 3.1 ModelagemMatemátia doProblema . . . 53
3.2 Desrição daPlataforma . . . 57
4 Fusão Sensorial e Resultados Experimentais 69
4.1 Congurações . . . 69
4.1.1 Conguração 1 . . . 69
4.1.2 Conguração 2 . . . 71
4.1.3 Conguração 3 . . . 72
4.1.4 Conguração 4 . . . 73
4.2 Ajuste das Matrizes de Covariânia . . . 75
4.2.1 EstimativadoRuído de ProessoAssoiadoaos Sinaisde En-tradae aos Erros de Modelagem . . . 75
4.2.2 Estimativado Ruídode Medição . . . 78
4.2.3 Critériosde Avaliação . . . 79
4.3 Reonstrução de Trajetórias Resultados Experimentais . . . 82
4.4 ConsideraçõesFinais . . . 91
5 Loalização Online 93 5.1 Fusão Sensorial . . . 94
5.1.1 Comuniação Entre Programas . . . 95
5.1.2 Iniializaçãodo Algoritmo . . . 95
5.1.3 EstimaçãodaTrajetória . . . 96
5.2 Interfae Homem-Máquina (IHM) . . . 97
5.2.1 Ferramentas Utilizadas . . . 97
5.2.2 Construçãoda Interfae de Exibição doMapa . . . 99
5.3 Resultados . . . 102
5.4 ConsideraçõesFinais . . . 105
6 Disussão e Conlusões 109 6.1 Visão Geral doTrabalho Desenvolvido . . . 109
6.2 Prinipais Resultados Alançados . . . 109
6.3 TrabalhosFuturos. . . 110
B Espeiações Ténias de Alguns Instrumentos 127
B.1 GPS . . . 127
B.2 Sistema de MediçõesIneriais . . . 128
1.1 Gráo de dados oletados om GPS embarado emum veíulo. . . . 27
1.2 Dados oletados om GPS (*) xono pontoindiado pelotriângulo. . 28
1.3 Dados om perda dosinal GPS em alguns pontos. O pontos expres-sos om (*) representam os pontos oletados sem perda do sinal de satélite; os pontos representados pelo írulo representam os pontos em quehá perda dosinal. . . 29
2.1 Órbitas dos Satélitesde GPS [Pak, 2007℄. . . 39
2.2 Etapas doalgoritmodo ltro de Kalman. . . 42
3.1 Sistema de oordenadas preso ao veíulo. . . 54
3.2 Sistema de oordenadas na Terra. . . 55
3.3 Modelo de Akerman.. . . 56
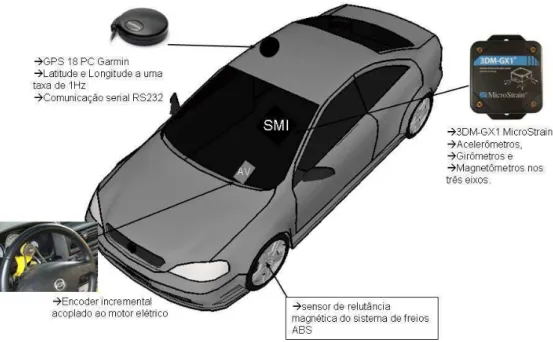
3.4 Representação da onguraçãofísia dos instrumentosnoveíulo. . . 58
3.5 Reeptor Garminmodelo GPS18. . . 59
3.6 Zonas UTM [Dana, 1994℄ . . . 60
3.7 Sensor MirostrainModelo 3DM-GX1. . . 61
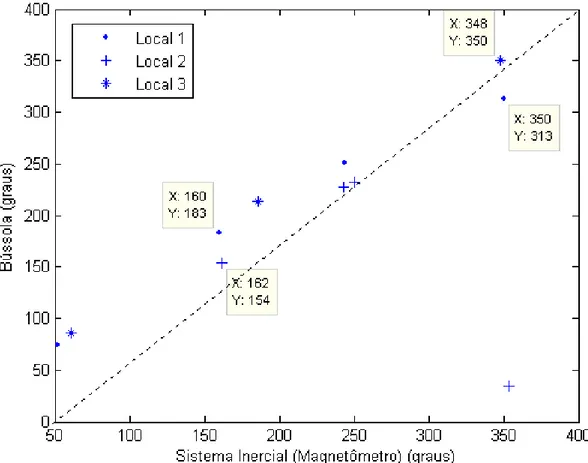
3.8 Bússola Prossional Utilizadano Experimento.. . . 62
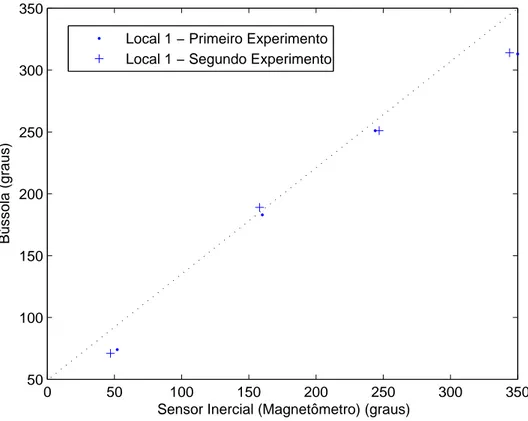
3.9 Medida do Sistema Inerial versus Medida da Bússola - Dados Co-letados em um Mesmo Loal. A reta traejada possui inlinação de 45 graus, para efeito omparativo (idealmente, as medidas obtidas deveriam estar sobre a reta) . . . 63
3.11 Sistema de Atuaçãodo Volante. . . 64
3.12 Controladorde Posição EPOS 24/5. . . 65
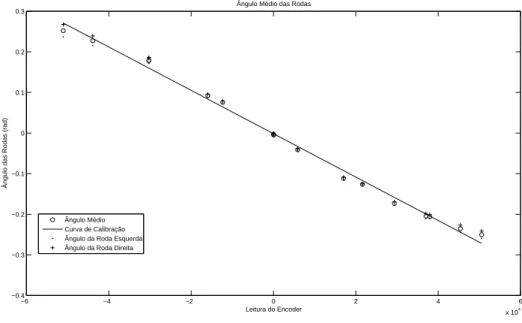
3.13 Curva de Calibração -Leitura doEnoder e Ângulo das Rodas. . . . 65
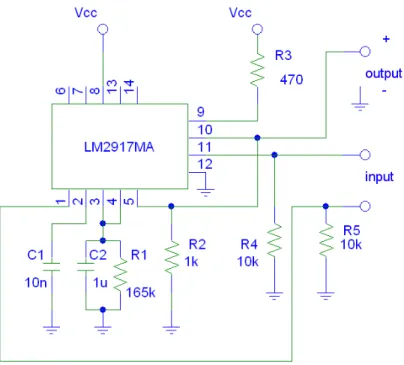
3.14 Diagrama elétriodoiruitode ondiionamentode sinal dos
senso-res de veloidadedas rodas . . . 67
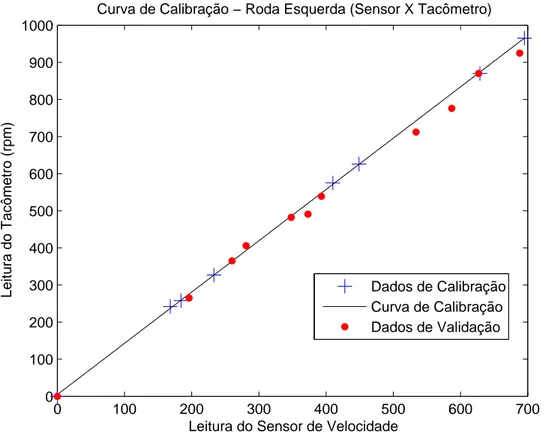
3.15 Curva de alibração dosensor de veloidade daroda direita. . . 67
3.16 Curva de alibração dosensor de veloidade daroda esquerda . . . . 68
4.1 Aeleração no eixo
x
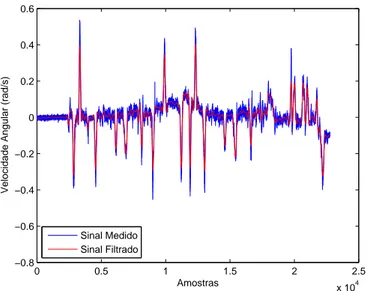
- sinal medido pelo SMI (azul) e sinal ltrado (vermelho). . . 764.2 Veloidadeangularemtornodoeixo
z
-sinalmedidopeloSMI(azul) e sinal ltrado(vermelho). . . 774.3 Comparação da inovação om o limite de onança
±
3
p
P
yy
paraos estados (a)
p
x
e (b)p
y
utilizando a Conguração 1. As linhas ontínuasorrespondemàinovaçãoeaslinhastraejadasrepresentamos limitesde onança . . . 80
4.4 Comparação da inovação om o limite de onança
±
3
p
P
yy
paraos estados (a)
p
x
e (b)p
y
utilizando a Conguração 2. As linhas ontínuasorrespondemàinovaçãoeaslinhastraejadasrepresentamos limitesde onança . . . 80
4.5 Comparação da inovação om o limite de onança
±
3
p
P
yy
paraos estados (a)
p
x
e (b)p
y
utilizando a Conguração 3. As linhas ontínuasorrespondemàinovaçãoeaslinhastraejadasrepresentamos limitesde onança . . . 81
4.6 Comparação da inovação om o limite de onança
±
3
p
P
yy
paraos estados (a)
p
x
e (b)p
y
utilizando a Conguração 4. As linhas ontínuasorrespondemàinovaçãoeaslinhastraejadasrepresentamos limitesde onança . . . 81
4.7 Gráo de reonstrução datrajetóriautilizandoaConguração 1. . . 83
4.8 Gráo de reonstrução datrajetóriautilizandoaConguração 2. . . 84
4.11 Gráo do traço da matriz de ovariânia da estimação da posição
utilizandoa Conguração 1. . . 87
4.12 Gráo do traço da matriz de ovariânia da estimação da posição utilizandoa Conguração 2. . . 87
4.13 Gráo do traço da matriz de ovariânia da estimação da posição utilizandoa Conguração 3. . . 88
4.14 Gráo do traço da matriz de ovariânia da estimação da posição utilizandoa Conguração 4. . . 88
4.15 Gráo das veloidades estimadas nas Congurações 1, 2 e 4 e da veloidade medidanaConguração 3. . . 91
5.1 Arquitetura de softwares desenvolvidos para a loalização. . . 94
5.2 Exemplo da busa de segmentos que estão ontidos ou intereptam uma janela. . . 99
5.3 Segmentos originais e espelhados - a operação de espelhamento pos-sibilita ouso daCGAL. . . 101
5.4 Janela para iniialização dosistema de loalização. . . 102
5.5 Janela de exibiçãoda loalizaçãoaolongo do trajeto. . . 103
5.6 TrajetóriaExibida sobre o Mapa. . . 104
5.7 TrajetóriaEstimada Durante a Exeução doExperimento. . . 104
A.1 Loalizaçãodoreeptor - innitaspossibilidades.. . . 122
A.2 Loalizaçãodoreeptor - uma irunferênia de possibilidades. . . 122
A.3 Loalizaçãodoreeptor - triangulação. . . 123
A.4 Fontes deErro naLoalizaçãoporGPS.Adaptadode [Ronnbak, 2000℄124 A.5 Inerteza no posiionamento forneido pelo reeptor GPS de aordo om a geometria daonguração dos satélites. . . 125
C.1 Busa de segmentos pelo mínimo retângulo envolvente - retângulos
são traçadosemtornodossegmentosde orientaçãoarbitráriaeentão,
a veriação de interseção é feita entre os lados dos retângulos e a
janela de busa. . . 132
C.2 Busa de segmentos pelo mínimo retângulo envolvente (Pior Caso).
Nesse aso, a busa seria efetuada em todos os retângulos, porém,
nenhum dos segmentosintereptam a janelade busa. . . 132
C.3 IntervalosElementares. . . 133
C.4 Interseção dos segmentos om um dos limites vertiais da janela de
busa. . . 134
4.1 Resumo das araterístias de ada onguração. . . 74
4.2 Valormédiodotraçodamatriz de ovariâniadaestimativade
posi-ção e do GPS. . . 89
4.3 Tempo total de proessamento em segundos para uma trajetória de
377 segundos, oequivalentea 11500 pontos. . . 90
Introdução
1.1 Motivação
Atarefade loalizaçãoonsistenadeterminaçãodaposiçãogeográade um
deter-minadoobjetoemrelaçãoaum dadoreferenial. Para seloalizaremumambiente,
animaisesereshumanosutilizamseus sentidos. Aobservaçãodoambientepormeio
dos órgãos responsáveis pela visão, tato, audição e olfato, ombinada om
onhe-imentos prévios de possíveis ambientes, leva o érebro a proessar as informações
observadas e hegar a uma onlusão daposição do observador no mundo. Em
sis-temas robótios móveis, os órgãos responsáveis pelos sentidos são substituídos por
sensoresutilizadosparaobservaroambiente. Essas observaçõessão proessadas em
omputadores quefazem otrabalhodo érebro, manipulandoasobservaçõespara
enontrar a loalização.
Estetrabalhoabordaaloalizaçãoautomátiadeumveíuloterrestrebaseado
em um arro de passeio ou automóvel, isto é, a determinação em tempo real da
posição e orientação do veíulo em um determinado ambientepor meio de diversos
sensoresqueforneeminformaçõesaumaunidadedeproessamentoresponsávelpor
ombiná-las am de se obtera melhor estimativade posiçãogeográa.
A tarefa de loalização é uma das mais importantes no desenvolvimento de
veíulos autnomos terrestres [Thrun et al.,2005℄. Esses veíulos são dotados de
sensores e omputação embarada, apaitando-os a se loomoverem para atingir
um objetivo pré-espeiado sem a intervenção humana. Para se loomover de
três questões fundamentais [Borensteinet al.,1996a℄:
•
Onde estou? O veíulo deve saber sua posição e orientação a m de tomardeisõesquanto aos movimentos seguintes. Essa éa tarefa de Loalização.
•
Para onde devo ir? Para efetuar uma tarefa, o veíulo deve saber para ondeeledeve ir. Ele deve,portanto, ter o onheimentodo Objetivo.
•
Dequeforma eu vou? Umavez onheidaaloalizaçãoedeterminadooobje-tivo domovimento, oveíulo deve deidir a maneirade realizaro movimento
paraatingiresseobjetivo. EssatarefaéhamadaPlanejamentodeMovimento.
A tarefa de loalizaçãoé a base da solução da loomoção autnoma e deve
ser tão preisa quanto possível. Porém, para responder a questão de loalização o
robdevesebaseareminformaçõesquetipiamentesãoruidosaseinompletas
pro-venientes de sensores, tais omo GPS (Global Positioning System), aelermetros,
girosópios, bússolas, inlinmetros, âmeras, entre outros. Para ampliar a
ona-bilidadedaloalização, éneessário ombinar as mediçõesdesses diversos sensores,
extraindo de ada uma delas suas melhores araterístias. Este trabalho visa a
instalação de alguns desses sensores no veíulo e o aumento da onabilidade na
informação de loalização utilizando ténias de proessamento de sinais e fusão
sensorial.
Além de viabilizar a loomoção autnoma do veíulo, a loalização
auto-mátia em um automóvel agrega ao mesmo algumas funionalidades, ampliando o
onforto domotoristae onferindo aele maior segurança. A instalaçãode sensores
inteligentes, que informamao usuário sua loalizaçãodentro de um espaço, failita
a ondução do veíulo em ambientes desonheidos, por meio da exibição em um
mapa da sua loalização, podendo, assim, guiá-lo até seu objetivo. Do ponto de
vista da segurança, esses sensores inteligentes podem ajudar o ondutor trazendo
informações que auxiliam a tomada de deisões, ou mesmo limitam determinadas
operações não permitidas para uma via, omo estaionar em loal proibido, parar
sobre uma faixa de pedestres, realizarultrapassagem emtrehos de faixa ontínua,
Aombinaçãodaloalizaçãoominformaçõesdoambientenoqualsetrafega
podeserapliadaaodesenvolvimentodeumguiaturístioeletrnio,oqualinforma
aos oupantes do veíulo os pontos turístios importantes ao longo do perurso,
dizendo qual a atração que está à direita ou à esquerda do veíulo, e trazendo
informaçõesa respeito dessa atração.
1.2 Objetivos
Este trabalho tem omo objetivo geral o desenvolvimento e implementação de um
sistema de loalizaçãoe reonstrução de trajetórias para um automóvelautnomo,
uja onabilidade na informação de posição e orientação do veíulo, bem omo
a frequênia om que essa informação é disponibilizada, sejam superiores àquelas
obtidasusandosomenteum sensorGPS. Esse sistemadeve ontar, ainda, om
tole-râniaafalhasrelativasàperdadosinalGPS.Paraisso, outrossensores deposição,
veloidade, aeleração e inlinação do veíulo são ombinados às medidas do GPS
pormeiodealgoritmosde ltragemestoástia. Asinformaçõesombinadassão
uti-lizadaspara areonstrução posterior datrajetória, após aexeução domovimento,
ou para, em onjunto om o mapa da área perorrida, informar ao usuário do
veí-ulo,duranteo movimento,sobre aproximidadede algunspontosde interesse, tais
omourvas,prédios,redutores develoidade,et. Alémdaposiçãoeorientaçãodo
veíulo, outros estados, que sejam de interesse para o desenvolvimento de sistemas
paraum veíulo autnomo, omo sua veloidade,porexemplo, são estimados.
Osobjetivos espeíosdeste trabalhosão:
•
Denição da relação entre entradas e saídas envolvidas no proesso, a mde se determinar que grandezas devem ser medidas e quais os sensores mais
apropriados para a mediçãodessas grandezas.
•
Desenvolvimentodeinstrumentaçãoembarada: alibraçãoeondiionamentoeletrniodossensoresabsolutoserelativos,instalaçãodossensoresnoveíulo,
integração dos sensores àunidade de proessamento.
•
Implementaçãoeanálisedealgoritmosparaltragemestoástiade fusãosen-sorialnareonstruçãodetrajetórias,visandoumaavaliaçãodeseudesempenho
nosaspetosderobustezainertezas,robustezafalhas,ustoeonabilidade.
•
Combinação das informaçõesde sensores om um mapa, eexibição daloali-zação do veíulo em uma interfae gráa à medida em que ele se loomove
dentro do Campus da UFMG om inerteza inferior e maior robustez que
aquelas providas porum reeptor GPS.
•
Avaliação dosistema desenvolvido, determinando suas araterístias emter-mos de robustez e preisão, busando respostas para as seguintes questões:
asinformaçõesdos sensores são onáveis (quala inerteza assoiada às suas
medidas)? Como ombiná-las a m de se obter uma informação que
orres-ponda mais elmente à realidade? Em que situação pode ser melhor utilizar
um ou outro sensor? Por quanto tempo osistema ontinua onável emaso
de perda do sinal GPS?
Postooquefoiexpressoaima,espera-sequeosistemaompostopela
instru-mentaçãoeproessamentodasinformaçõesparaestimaçãode estados, desenvolvido
neste trabalho, ontribua para o desenvolvimento de um arro autnomo.
1.3 Justiativas
O desenvolvimento de um sistema de loalização uja onabilidade e
frequên-ia da informação sejam ompatíveis om os requisitos de um sistema de
on-trole se justia pela neessidade de atenção a esses requisitos no desenvolvimento
de veíulos autnomos. O sistemas de loalização utilizados atualmente,
inlu-sive em produtos omeriais, são baseados apenas em dados de GPS, o qual
for-nee a informação de loalização no plano om uma inerteza de até 30 metros
[Brown & Hwang, 1997℄. Alémdisso,a frequêniade envio dasinformaçõesébaixa
(entre 1Hze 5Hz [Garmin,2005℄).
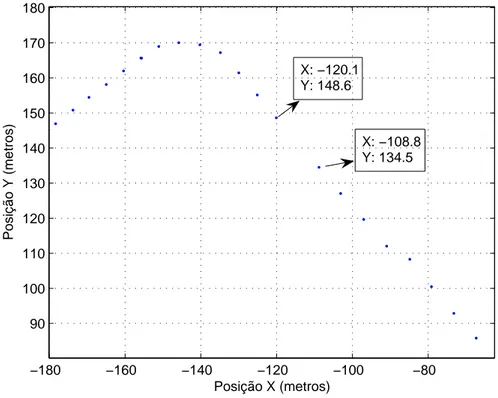
AFigura1.1mostraumgráotraçadoomosdadosoletados omumGPS
pos-−180
−160
−140
−120
−100
−80
90
100
110
120
130
140
150
160
170
180
Posição X (metros)
Posição Y (metros)
X: −108.8
Y: 134.5
X: −120.1
Y: 148.6
Figura1.1: Gráo de dados oletados om GPS embarado emum veíulo.
18 metros do trajeto e, nesse intervalo, não existe informação desse movimento.
Alémdisso,a posiçãoinformadaporum reeptorGPS pode variar para um mesmo
ponto,omomostraaFigura1.2,queexibeumgráodeumexperimentoondeo
re-eptorGPS semantevexoemum pontode oordenadasonheidas 1
,representado
no gráo pelo triângulo. É possível observar que, apesar do reeptor permaneer
imóvel,foram obtidasinformaçõesvariadas de loalização.
OutraaraterístiadoreeptorGPSéaperdade sinalemasodeobstáulos
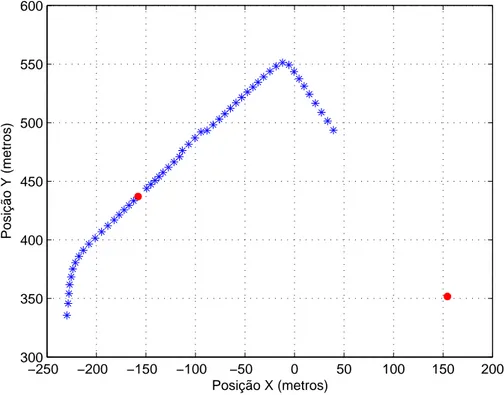
omotúneis,onstruçõesouvegetação muitodensa. A Figura1.3mostradados
ob-tidosemumexperimentorealizadoom omesmoreeptor,onde, emalguns pontos,
o número de satélites vistos pelo reeptor foi insuiente para se obter a
estima-tiva de sua posição, e, nesse aso, o reeptor indiou uma informação inorreta de
loalização. Ospontos inorretos estão representados nagura pelos írulos.
Apesar das araterístianegativas menionadas,o reeptor GPS ébastante
utilizado em loalização por ser um instrumento que fornee posição absoluta em
1
Coordenadas obtidasutilizandoum GPS dotipodiferenial ominerteza de
±
0,006 m no−4
−2
0
2
4
6
−20
−15
−10
−5
0
5
Posição X (metros)
Posição Y (metros)
Figura1.2: Dados oletados om GPS (*) xono pontoindiadopelotriângulo.
relação à Terra. Assim, a ombinação desse instrumento om outros sensores que
possam melhorar a qualidade da informação. Uma das soluções mais adotadas é a
ombinação entre GPS e Sistemas de Navegação Inerial (Inertial Navigation
Sys-tems -INS).Isso oorreporque ossensores enontradosnesses sistemasapresentam
araterístiasomplementares àsdoGPS [Grewal etal.,2007℄. Ossensores de
sis-temas ineriais forneem informaçãoa uma alta taxa de amostragem. Porém, essa
informaçãoédegradadaaolongodotempodevidoaoaúmulodeerros. Aestimação
de estados utilizando a ombinação desses sensores é realizada neste trabalho por
meio de algoritmosreursivos de ltragem estoástia.
1.4 Metodologia
A realização destetrabalho foi possível utilizandoametodologiadesrita aseguir:
•
Para os testes e experimentos foi utilizadoomo veíulo experimental umau-tomóvelmodeloAstra Chevrolet, ano 2003 2
;
−250
−200
−150
−100
−50
0
50
100
150
200
300
350
400
450
500
550
600
Posição X (metros)
Posição Y (metros)
Figura1.3: Dados om perda do sinal GPS em alguns pontos. O pontosexpressos
om (*) representam os pontos oletados sem perda dosinal de satélite; os pontos
representados peloírulo representam ospontosemque háperdado sinal.
•
Apósadenição dossensores utilizadosnoveíuloparaaloalização,estesfo-raminstaladosnoveíulo. Foramutilizadosnestetrabalhosensoresdeposição,
veloidade eaeleração, onforme apresentao Capítulo3;
•
A oleta de dados foi realizada em experimentos de movimentação doauto-móveldentrodoCampus daUFMG, ujomapaderuas eprédiosfoi forneido
peloDepartamentode PlanejamentoFísio eObras (DPFO/UFMG);
•
De posse dos dados oletados, foi realizada a fusão sensorial das informaçõespara a reonstrução da trajetória efetuada, utilizando diversas ongurações
de sensores ealgoritmos,a m de ompará-las.
•
Apósaavaliaçãododesempenhodas onguraçõesde sensores ealgoritmos,aforma de premiação pelo trabalho intitulado Desenvolvimento de um motor multiombustível
sobrealimentado, visandoganhos de potênia etorque, sem prejuízo na eiêniaenergétia
ori-ginal,venedor1
o
onguração seleionada foi adaptada para aquisição e proessamento online
das informações, a m de seestimar aloalizaçãodoveíuloem tempo real;
•
Utilizandoo mapadoCampus daUFMG, foipossível onstruiruma interfaegráa que exibe na tela de um omputador portátil a posição do veíulo ao
longodo trajeto.
1.5 Resultados Alançados
A investigação das ténias e modelos para fusãosensorial realizadaneste trabalho
bemomoarealizaçãodetestesemsituaçõesreaispossibilitouavaliarongurações
adequadas à tarefa de loalização do arro e determinar as limitações do sistema
desenvolvido.
Um dos prinipais produtos deste trabalho é um sistema de loalização em
tempo real onstituído pordiversos programas querealizam aoleta dos dados dos
sensores, um programa responsável pela fusão sensorial e um programa que exibe
graamente os resultados obtidos em um mapa. Esse sistema pode ser utilizado
omo um guia para auxiliaro motorista na sua orientação emum ambiente. Além
disso, asinformaçõesobtidas omo resultado dafusão podem ser utilizadas
futura-menteomodadosderetroalimentaçãoneessáriosaosistemadeontroleautomátio
doveíulo. Estetrabalhoresultou,também,emduaspubliaçõesemongressos que
estão listadasnas referênias [Santos etal., 2008℄e [Freitas etal., 2009℄.
1.6 Organização do Texto
Este texto está organizado em seis apítulos que abordam os seguintes assuntos: o
Capítulo2traz uma revisão de trabalhos similaresque inspirarameste trabalhoou
que auxiliaram no seu desenvolvimento, ontendo o estado da arte do
desenvolvi-mento de veíulos autnomos.
No Capítulo 3, apresenta-se os modelos matemátios utilizados para a
pro-pagação dos estados estimados, além de uma desrição onstrutiva da plataforma
No Capítulo 4, apresenta-se o proedimento utilizado na fusão sensorial
of-ine. A análisedos algoritmosexperimentados nareonstrução de trajetóriaé
dis-utidanesse apítulo.
No Capítulo 5, a apliação dos algoritmos para estimação dos estados de
interesse em tempo real é detalhada. O desenvolvimento da interfae de usuário,
responsável por integrar a estimação de loalização em tempo real a um mapa na
tela de um omputador portátil, tambémé apresentado.
Disussões e onlusões são relatadas no Capítulo 6, o qual apresenta ainda
algumaspropostas de ontinuidadedo trabalho.
OApêndieAapresentaoprinípiodefunionamentodeumreeptorGPS.O
ApêndieB listaespeiaçõesténias de algunsdos instrumentosutilizadosneste
Revisão Bibliográa
2.1 O Problema da Loalização
OproblemadaLoalizaçãoonsisteemresponderaquestãoOndeestou? doponto
devistadoveíulo,ouseja,enontrar suaposiçãonoambientedetrabalho. Noaso
de um veíulo terrestre, loalizar signia enontrar sua posição e orientação em
relaçãoa um sistema de oordenadas global xono ambiente.
Aloalizaçãoéabase para a loomoçãoautnoma. Se o veíulo não tem
in-formaçãosobresualoalização,deidiroqueeledevefazersetornaumatarefamuito
difíil. Alguns autoresonsideram a loalizaçãoomo sendoo problema
fundamen-talpara prover a um rob móvel a habilidade de seloomover de formaautnoma
[Cox, 1990℄.
A perepção do ambiente pelo veíulo é viabilizada pelo uso de sensores,
que podem prover ao sistema de proessamento medidas de loalização absolutas
ou relativas. As observações absolutas são aquelas apazes de forneer informação
da loalização do rob móvel em relação ao ambiente a qualquer momento sem a
neessidadedoonheimentodemedidasanteriores. Elassãorealizadas,geralmente,
pormeio desensores exteroeptivosabsolutos,quemedemvaloresexternosaorob,
omo,porexemplo,adistâniadorobaumobjeto. Asmedidasrelativas,poroutro
lado,neessitamdoonheimentodoestadoanterior dorobpara gerarinformação
de sua posição atual. Elas são obtidas pelo uso de sensores proprioeptivos, que
informam valores internos do veíulo, omo, por exemplo, veloidade das rodas ou
2.1.1 Loalização Relativa (Dead-Rekoning)
As ténias de loalização relativa, ou dead-rekoning, referem-se a uma forma de
navegação baseada na medida de veloidade e direção de movimento de um orpo
e o tempo deorrido desde sua última posição onheida [Bowdith, 1995℄. Essa é
umaformade navegaçãobastanteprimitiva,utilizadatantoparaloalizaçãoquanto
paraprevisãode horade hegadaaodestinoemviagensde aviãoounavio. Otermo
dead-rekoning data doséulo XVII e sua origemé polêmia;alguns diionários de
etimologia armam que dead-rekoning é uma abreviação para dedued-rekoning,
outrosdizemqueotermodead nadatem averom dedued,mas simomosentido
de exato, absoluto, outros ainda, defendem que o termo live era utilizado para
a navegação baseada nas estrelas e no movimento dos planetas, e portanto, dead
seria utilizado para a loalizaçãosem a utilizaçãodessa informação[Adams, 2002℄.
Essa ténia tem sido bastante utilizada até os dias atuais, porém, sua fragilidade
onsiste no aúmulo de erros ao longo do tempo, tendo em vista que o álulo da
posiçãoatual ébaseado nas posiçõesestimadas anteriormente, osquaistipiamente
ontêm erros.
Em robótia móvel, os prinipais modelos e medidas utilizados para a
loa-lização relativa são o modelo de veloidades, a odometria e a navegação inerial,
expliadosa seguir.
Modelo de Veloidades
O modelo de veloidades é utilizado quando a veloidade das rodas não é
dispo-nibilizada para o álulo da posição. Ele é baseado na medição das veloidades
translaional e rotaional do rob, em sua posição anterior, e no tempo deorrido
desde a última estimativa de posição para o álulo das posições posteriores. A
partirdamedida das veloidadesedo onheimentodotempo,épossívelestimar o
desloamentonesseperíodoque,somadoàposiçãoiniial,forneeumaestimativada
posição atual. Porém, não hágarantiasde que asveloidades oletadas em um
de-terminadoinstanteorrespondamàs veloidades de todoo períodode amostragem.
au-real.
Esse modelo é pouo utilizadoomo únia ferramenta para a loalização de
veíulos, mas pode ser utilizado omo subsistema redundante, no aso de falha de
outrosmétodos de loalização, oumesmo nafusãoom outrosmétodos.
Odometria
A odometriaé a ténia de se obter a loalização por meio da integração ao longo
do tempo da veloidade das rodas do rob móvel obtida por enoders. É uma das
téniasmais utilizadas,devido àsua simpliidadeebaixoustode implementação.
A distânia perorrida pelo rob é alulada a partir do número de revoluções de
suas rodas emum determinadoespaço de tempo. O ângulode orientação pode ser
obtidopormeio daomparação dos valores medidos emada uma das rodas.
Para a loalização utilizando a odometria, é neessário um prévio
onhei-mento da posição iniial do rob. Com a utilização dessa ténia, obtém-se boa
preisãopara pequenos períodos e altas taxas de amostragem, porém, porser uma
téniaqueintegraasmedidasaolongodotempo,elaintegratambémoserros, que
se aumulam no álulo e resem indenidamente. Além do aúmulo de erros, a
ténia é vulnerável a derrapagens, que não são ontabilizadas pelos enoders e a
preisão da medição é fortemente dependente da resolução desses sensores. Outra
desvantagem desse método é a sensibilidade ao terreno, que deve ser suave para
um bomresultado, ea sensibilidadeà variaçãooudiferença nodiâmetrodas rodas.
Esses aspetos negativos ausam grandes erros ao longo do tempo, prinipalmente
naorientação[Negenborn, 2003℄.
Apesardasfragilidadesdométodo,aodometriaéamplamenteutilizada,
prin-ipalmenteemonjuntoomoutrosmétodos,pormeiodefusãoeintegraçãosensorial
[Borensteinet al.,1997℄.
Sistemas de Navegação Inerial
Sistemasde Navegação Inerial (Inertial NavigationSystems - INS)são ompostos
por girmetros e aelermetros para medir veloidade angular e aeleração linear,
va-seobterodesloamentoangular. Aelermetros sãosensores quemedemaeleração
linear nos três eixos (x, y e z). A aeleração deve ser integrada duas vezes para
a obtenção do desloamento linear em ada um dos eixos. Aelermetros não são
apropriadosparaterrenos desuperfíieirregular,poisdevidoàinlinaçãodoterreno
(e onsequente inlinaçãodo sensor), uma omponente da aeleração gravitaional
estarápresente nos outroseixos além dovertial [Borensteinetal., 1997℄.
O INS, assim omo a odometria, também sofrem om o problema de
aú-mulo de erros de integração (drift), portanto não são apropriados para a
es-timação de posição por um longo período. Porém, o INS é mais preiso e
pode forneer informação a uma taxa de amostragem tão alta quanto a
odo-metria [Borensteinet al.,1996b℄. Atualmente, esses sistemas são utilizados em
onjunto om outros sensores absolutos, que podem ajudar a diminuir o
aú-mulo de erros de integração [Barshan &Durrant-Whyte, 1995℄. Uma
ongura-ção bastante utilizada é a ombinação desses sensores om magnetmetros, que
orrigem erros na orientação, um dos mais signiantes parâmetros da loalização
[Borensteinet al.,1997℄.
2.1.2 Loalização Absoluta
A medição absoluta da posição onsiste na obtenção da posição do rob
indepen-dente dainformação de posiçãoem instantes anteriores,ou seja,sem aneessidade
de se integrar uma sequênia de medições para se hegar à posição atual. Para
se obter a posição om um sensor absoluto, basta onsiderar sua medida naquele
instante. A prinipalvantagem dos sensores absolutos é queseus erros não resem
indenidamente, poisnão háintegração das mediçõesrealizadas.
Umsensor absoluto pode forneera loalizaçãoompleta dorob ouapenas
um de seus parâmetros (omo o magnetmetro, por exemplo, que fornee apenas
o ângulo de orientação em relação ao ampo magnétio da Terra). Os sensores
absolutos podem ser baseados emmapas ouem maradores (landmarks).
A loalizaçãobaseada em mapas(tambémonheida omo model mathing)
utiliza araterístiasgeográas doambiente que podem ter sido extraídas de um
obstáulos,et. Essa representação éarmazenadanoveíuloe,àmedidaemqueele
realizao trajeto planejado,um novo mapeamentoda região emque elese enontra
é feito e omparado ao mapa armazenado. Nessa omparação é possível obter a
loalizaçãodopadrãoobservadonomapaglobale,assim,aloalizaçãodoveíulo. O
usodessaténiaéadequadoaambientesondeoenárionãosofregrandesmudanças
ao longo do tempo. Essa é uma ténia bastante utilizada em ambientes internos
emonjuntoomsensores relativos,naorreçãodeestimativas,porexemplo,obtida
peloálulo daodometria[Fang et al.,2006℄.
Maradoresoulandmarks sãoobjetosujaposiçãoéonheidaexa. Existem
dois tipos de landmarks: os ativos e os passivos. Um sensor de landmarks ativos
reebe sinais de seus maradores indiando a posição relativaentre osensor e ada
landmark.
Os landmarks passivos não enviam sinais ao seus sensores; são os sensores
que efetivamente detetam a presença de um landmark em seu ampo de visão e
alulamsuadistâniaemrelaçãoaeles. Oslandmarks passivospodemser naturais
ouartiiais.
Oslandmarks naturaissão objetosquefazem partedeum determinado
ená-rio,omo porexemplo,árvores,portas, janelas, sinaisde trânsito. Ossensores mais
utilizadospara detetar esse tipode maro são as âmerasde vídeo. Oslandmarks
artiiaissão aqueles inseridos no enário espeiamente para servir de referênia
parao sistema de loalização,omo guras geométrias, plaasoloridas,
dispositi-vos RFID's (Radio-Frequene IDentiation), et.
Osprinipaismétodos de loalizaçãoporlandmarks ativossão a trilateração
e a triangulação [Borensteinet al.,1997℄ [Singhal, 1997℄. A ténia da trilateração
onsiste em utilizar a informação de distânia do sensor a três ou mais landmarks
para alularsua posição e orientação. A triangulação utiliza, além das distânias,
os ângulos entre os sistemas de oordenadas do sensor e dos landmarks para esse
álulo. Osensor absolutomais utilizadoatualmenteéoGlobal Positioning System
(GPS),que é um sensor de landmarks ativos que utiliza o método da triangulação
Global Positioning System
OSistemadePosiionamentoGlobal,maisonheidoomoGPS(GlobalPositioning
System, é um sistema de navegação baseado em satélites desenvolvido pela Força
AéreaepeloDepartamentodeDefesados EstadosUnidos daAméria. Esse sistema
foi oloado emoperação na déada de 90,mas seu desenvolvimento teve iníio no
nal dadéadade 70[Stuk & Kuga,2005℄.
Autilizaçãodessesistemadeposiionamentoporiviséparialmenteaberta.
Usuários do mundo todo têm aesso à informação de posição, veloidade e tempo
om erta preisão, dependendo do reeptor, ondições limátias,loalização
geo-gráa,et. Ossatélitesqueompõemosistemade navegaçãotransmitem sinaisde
radiofrequênia ontendo informações suientes para que o reeptor ompute sua
posiçãoeveloidade. Para queesseálulosejapossível,éneessárioqueoreeptor
apte osinal de, pelo menos,três satélites. O reeptor utiliza a téniade
triangu-lação para alular sua latitude, longitude e altitude. Mais informaçõessobre essa
téniaenontram-se noApêndieA.
Atualmente o sistema é omposto de 24 satélites (e mais 4 sobressalentes)
distribuídosde formaaproximadamenteuniformeemseis órbitasaoredordaTerra.
Cada órbita possui 4 satélites. Cada satélite gasta 12 horas para ompletar uma
voltaaoredor daTerra. Isso fazom queum usuário loalizadoemqualquer ponto
daTerra tenha visibilidadea pelo menos quatro satélites todoo tempo, desde que
não haja obstáulos entre o satélite e o reeptor (Figura 2.1). A geometria dos
satélites visíveis no éu muda ao longo do tempo, pois os satélites não são
geoes-taionários [Brown &Hwang, 1997℄. O reeptor é apaz de identiar qual satélite
envia um sinal a ada momento por meio de uma sequênia pseudo-aleatória que
é transmitida pelo satélite. Sua loalizaçãoao redor da Terra é monitorada e
atu-alizada periodiamente por estações terrestres que veriam também o status da
atividadedos satélites.
Atransmissão de mensagensporondasde rádio trazaosistema erta
fragili-dade a variações geográas e atmosférias. Perturbações omo reexão e refração
sa-Figura2.1: Órbitas dos Satélitesde GPS [Pak, 2007℄.
informação. Alémdisso, um ruído do tipo random walk [Papoulis & Pillai,2001℄ é
inserido no sinal enviado pelos satélites, o que faz om que o reeptor pareça
es-tar em movimento, mesmo quando está parado. Para orrigir esses problemas, a
ombinação desse sistema om outros sensores é uma saída omumente utilizada
[Grewal etal.,2007℄. Maiores detalhes sobre o funionamento do GPS utilizado
neste trabalhoestão desritos naSeção 3.1.1.
2.2 Métodos de Fusão Sensorial
NaSeção 2.1foramapresentados alguns tiposde sensores quepodem ser utilizados
na solução do problema de loalização. Porém, para que seja possível aproveitar
as araterístias de ada sensor, é neessário ombinar a informação de diversos
sensores. Esse éo objetivo dos métodos de fusão sensorial: ombinar a informação
proveniente de sensores diferentes, om diferentes araterístias e frequênias de
amostragem, valendo-se do onheimento do modelo matemátio que determina a
evolução temporal das variáveis de estado do sistema, a m de se obter uma boa
estimativa das variáveis em questão. As ténias de fusão sensorial tratam de
ba-lanear as araterístias de ada sensor, para que a estimativa obtida seja mais
onável do queada mediçãoobtida separadamente.
A fusão da informação sensorial pode oorrer entre sensores que observam
uma mesma variável de um proesso, o que é hamado de interação redundante,
entre sensores omplementares, que observam variáveisdiferentes doproesso e em
serve de base para as observaçõesdo outro sensor [Luo &Kay, 1989℄.
São duas as prinipaisabordagens utilizadasnas ténias de fusão sensorial:
métodos de fusão estatístia e métodos de fusão probabilístia [Singhal,1997℄. As
ténias de fusão estatístia são aquelas baseadas no método de aproximação por
mínimos quadrados, utilizado para predizer valores de variáveis ontaminadas por
sinais aleatórios. São exemplos dessa ténia o ajuste por mínimos quadrados e os
algoritmosbaseados naltragem de Kalman. Essas ténias são mais utilizadasna
fusãono níveldo sinal, onde a informaçãoltrada possui araterístias
semelhan-tes àsinformaçõesforneidaspelos sensores. As ténias de fusãoprobabilístiasão
aquelas baseadas nos oneitos de inerteza e onança inerentes à Teoria da
Pro-babilidade, omo as redes Bayesianas e a lógia fuzzy, e são omumente utilizadas
para a fusão sensorial de informações om um nível de abstração elevado, omo a
fusãoao nívelda araterístia,ouao nível dosímbolo[Fonsea,1999℄.
Ossensores envolvidos nestetrabalhoforneeminformaçõesde posição,
velo-idadeangular do veíulo, aeleração linear, veloidade angular das rodas e ângulo
degirodovolante. Todosossinaisforneidosporesses sensores são digitaise
amos-trados a diferentes taxas. Considerando os objetivos deste trabalho, são utilizados
algoritmosdefusãosensorialbaseadosnoFiltrode Kalman. AsSeções2.2.1 e 2.2.2
apresentam ofunionamentodesses algoritmos.
2.2.1 Filtro de Kalman
O Filtro de Kalman (KF, do inglês Kalman Filter), desrito pela primeira vez em
1960porRudolfEmilKalman [Kalman,1960℄,é uma soluçãoreursiva para o
pro-blema da estimação de estados de sistemas lineares e Gaussianos. É um algoritmo
não polarizado e de variânia mínima para a estimação de estados de um sistema
dinâmioapartirdemediçõesruidosasede ummodelodosistema. Usualmente, na
utilização do KF assume-se um modelo linear disreto para o sistema em questão
representado emespaço de estados:
x
(
k
) =
A
(
k
−
1)
x
(
k
−
1) +
B
(
k
−
1)
u
(
k
−
1) +
w
(
k
−
1)
,
(2.1)sendo
x
∈
R
n
o vetor de estados,
u
∈
R
m
o vetor de entradas,
A
(
k
−
1)
∈
R
n
×
n
,
B
(
k
−
1)
∈
R
n
×
m
e
C
∈
R
p
×
n
as matrizesdo modelo,
w
ev
são variáveisaleatórias que representam os ruídos de proesso e de medição, respetivamente.Assume-se que
w
ev
são variáveis aleatórias Gaussianas, mutuamente independentes, de médiazeroeujasmatrizesdeovariâniasãoQ
(
k
−
1)
eR
(
k
)
. Éimportantenotar que as matrizes do modelo podem variar ao longo do tempo. O ltro de Kalmannão é restrito a esse tipo de sistema, podendo ser utilizado em sistemas variantes
no tempo e, om algumas modiações, pode ser apliado a sistemas não-lineares
[Teixeira, 2008℄.
De posse do modelo, o objetivo do algoritmo é minimizar o valor esperado
para o erro quadrátio de estimação assoiado ao vetor de estados
x
(
k
)
. Isso é equivalente a minimizar o traço da matriz de ovariânia dos erros de estimação[Welh &Bishop, 2006℄, [RiosNeto &Hemerly, 2007℄.
Oalgoritmode estimaçãodo KFé, basiamente, onstituído de duas etapas:
predição ou propagação e atualização ou orreção. Na etapade predição os estados
são alulados a partir do modelo disreto, utilizando-se a estimação obtida na
iteraçãoanterior
x
ˆ
(
k
−
1
|k
−
1)
paraestimarosestadosdaiteraçãoatualx
ˆ
(
k|k
−
1)
, ouseja,omodelo épropagado parase enontrar um estimativadoestadoatual, talque
ˆ
x
(
k|k
−
1) =
A
x
ˆ
(
k
−
1
|k
−
1) +
Bu
(
k
−
1
|k
−
1)
,
(2.3)ˆ
y
(
k
) =
C
x
ˆ
(
k|k
−
1)
.
(2.4)Essa estimação obtida na predição
x
ˆ
(
k|k
−
1)
ey
ˆ
(
k
)
é hamada de esti-mativaa priori. Emseguida,alulam-seas matrizesde ovariâniadaestimação eoganho de Kalman:
P
(
k|k
−
1) =
AP
(
k
−
1
|k
−
1)
A
T
+
Q
(
k
)
,
(2.5)P
yy
(
k|k
−
1) =
CP
(
k|k
−
1)
C
T
+
R
(
k
−
1)
,
(2.6)P
xy
(
k|k
−
1) =
P
(
k|k
−
1)
C
T
,
(2.7)K
(
k
) =
P
xy
(
k|k
−
1)
P
−
1
yy
(
k|k
−
1)
.
(2.8)paraorrigiraestimativado estadoom basenamedição
y
(
k
)
doinstanteatual. A etapade orreção levaemonsideraçãoadiferençaentre ovetorde mediçõesy
(
k
)
e aestimativaa priori das saídasy
ˆ
(
k
)
, onheida ominovaçãopara obter umanova estimativa,a estimativaa posteriori dos estados, dada por:ˆ
x
(
k|k
) = ˆ
x
(
k|k
−
1) +
K
(
k
)[
y
(
k
)
−
y
ˆ
(
k
)]
.
(2.9)ApartirdoganhodeKalmanedasmatrizesdeovariâniaapriori,épossível
alularamatrizdeovariâniadaestimativaaposteriori paraseavaliarainerteza
assoiada à estimação resultante:
P
(
k|k
) =
P
(
k|k
−
1)
−
K
(
k
)
P
yy
(
k|k
−
1)
K
T
(
k
)
.
(2.10)A Figura 2.2ilustra as etapas do algoritmodo ltro de Kalman. O ltro de
Kalman é um algoritmo apaz de inorporar à sua estimativa toda a informação
quepossa serforneidaaele, desdeque obedeidassuas restriçõesde linearidadedo
modelo,ruídoGaussianoede médianula,forneendoaindaainertezadaestimação
obtidaao nal de ada iteração [Maybek, 1979℄. Porém, o sistema estudado neste
trabalho apresenta uma relação não-linear entre as entradas e os estados. Nesse
aso, outrasversões doFiltro de Kalmansão utilizadas,omo porexemplo, oEKF
2.2.2 Filtro de Kalman Estendido
O Filtrode Kalman Estendido (EKF) é uma adaptação doKF para sistemas
não-lineares. Nesse algoritmo, o sistema é linearizado emtorno da última estimativa a
ada iteração. Essa linearização é realizada utilizandoderivadas pariaisdas
equa-çõesdo proesso[Jazwinski, 1970℄, [Aguirre,2007℄.
No álulo dos estados utilizando o EKF, assume-se que a equação que
des-reve a dinâmiadosistema éuma equação de diferenças não-linearom função de
saída tambémnão-linear:
x
(
k
) =
f
(
x
(
k
−
1)
, u
(
k
−
1)) +
w
(
k
−
1)
,
(2.11)y
(
k
) =
h
(
x
(
k
)) +
ν
(
k
)
.
(2.12)No algoritmo do EKF, alula-se a estimativa a priori dos estados a partir
domodelo não-lineardo sistema. Emseguida, alula-seas matrizesJaobianas do
modelo (
F
(
k
)
) e das medidas (H
(
k
)
). A partir dessas matrizes, a ovariânia dos errosassoiadaàestimaçãoapriori (P
(
k|k
−
1)
)é aproximada,onformeaseguinte equação:P
(
k|k
−
1) =
F
(
k
−
1)
P
(
k
−
1
|k
−
1)
F
T
(
k
−
1) +
Q
(
k
−
1)
.
(2.13)Oganho de Kalman éobtido omo:
K
(
k
) = (
P
(
k|k
−
1)
H
T
(
k
))(
H
(
k
)
P
(
k|k
−
1)
H
(
k
)
T
+
R
(
k
−
1))
−
1
.
(2.14)A estimativaa posteriorié dada por:
ˆ
x
(
k|k
) = ˆ
x
(
k|k
−
1) +
K
(
k
)[
y
(
k
)
−
H
x
ˆ
(
k|k
−
1)]
.
(2.15)Pode-se dizer que os passos para implementação do algoritmo do Filtro de
Kalman Estendido são os mesmo do Filtro de Kalman, desde que substituídas as
matrizesdomodeloporsuasmatrizesJaobianasavaliadasaadaiteraçãonoponto
deoperaçãoorrespondenteaoinstanteatualnoálulodasmatrizesde ovariânia.
Paraautilizaçãodessesalgoritmosde fusãosensorialéneessárioonheeromodelo
2.3 Trabalhos Relaionados
A loalização é neessária em grande parte dos métodos de planejamento de
mo-vimento e ontrole enontrados na literatura. A loalização pode ser vista omo
uma transformação entre sistemas de oordenadas. Assumindo-se que os sensores
instaladosno rob são apazes de forneer sua posição loal, ou seja, em relação a
um sistema de oordenadas axado na origem do movimento, é neessário, então,
denirsua posição emrelaçãoa um sistema de oordenadas global.
Na loalização global são utilizados sensores absolutos, tais omo: sistemas
de visão omputaional, GPS ou informações de mapas. Porém, sensores absolutos
são, em geral, muito lentos ou não têm taxa de amostragem bem denida (omo
sensores que utilizam maros no ambiente para se loalizar), fazendo om que a
taxade atualização da estimação sejabaixa, o que não ésuiente para o ontrole.
Nesse aso, utilizam-sesensores relativosomo omplementopara suprir oontrole
om informações nesse intervalo [Bonnifaitet al.,2003℄. Em ambientes externos,
umaombinaçãobastanteutilizadaéaintegraçãoentre GPSeunidadesde medidas
ineriais (IMU). Os trabalhos desenvolvidos por Caron e outros (2006) e Zhou e
outros(2007) são exemplos de sistemas om essa onguração de sensores.
Outraformade seampliarapreisãonaloalizaçãoéautilizaçãode ténias
de visão omputaional para enontrar e identiar maros visuais no ambiente.
Com autilização de uma âmera presa ao veíulo, é possívelsaber, por exemplo, a
posiçãorelativaentre oveíuloeummarovisuale,então, onheendoaloalização
domaro,determinaraloalizaçãodoveíulo. Essaténiaéutilizada,porexemplo,
em[Moreira etal.,2007℄.
Otrabalho de Roumeliotise Bekey (1997) desreve uma implementação que
ombina a informação de sensores relativos, omo potenimetros que medem o
ângulo das rodas, girmetros e enoders om a informação de um sensor global
que provê a orientação do veíulo baseada na posição do Sol. A fusão sensorial
foi realizada por meio do algoritmo do EKF de uma forma sequenial, suprindo o
sistema de loalizaçãoom informações baseadas nos enoders quando o rob não
dosemrobótiamóvelutilizandométodosestatístios eamaioriadeles utilizaomo
algoritmodeestimaçãode estadosoltrodeKalmanesuasvariações. Ouso doKF
omo método de fusão sensorial ébastantedifundido, prinipalmente emtrabalhos
em que se deseja ombinar informações de sensores absolutos om informações de
sensores relativos,omo em [Caron etal., 2006℄, ujo objetivo é o desenvolvimento
de um algoritmo de integração de sensores levando em onsideração o ontexto.
Para tal, o trabalhoutiliza KF e lógia fuzzy, agregando informação à estimação e
avaliando avalidadedos valoresmedidos.
Comoobjetivode reduzireeliminaroerro deposiçãoproduzidopelas
iner-tezasnas restriçõesexistentesentre asrodasdorobeosolo,emLineoutros(2004)
utiliza-seoltrode Kalmanparafusãosensorialdos dadosprovenientes de sensores
ultrasnios, girosópio e enoders. Os enoders foram posiionados nas rodas e
medem a posição dos motores de passo para alular a orientação do rob. Essa
informaçãoéfundida om ainformaçãodogirosópiopara seobter uma estimativa
doângulode orientação. Segundo osautores, o erro máximode posiçãoenontrado
om o estimador implementado foi de 50mm e o erro máximo de orientação foi de
2,5 o
.
Otrabalho desritoem [Ivanjko etal.,2005℄ apresenta a implementação dos
dois estimadores mais omumente utilizados em fusão sensorial para sistemas
não-lineares,oEKFeoUKFeaomparaçãodedesempenhoentreeleseomo
posiiona-mentobaseado em odometria. A partirdos resultados apresentados nesse trabalho,
é possível notar que a fusão sensorial melhora signiativamente o desempenho da
loalização em relação aos sensores separadamente. A porentagem de erro
obser-vada nesse trabalho para o algoritmo EKF é, em média, ligeiramente menor que
noUKF, porém, pode-se notar pelos gráos, que o UKF apresenta uma ltragem
mais suave, ou seja,o erro ometido na estimativaem ada iteraçãoé menor que o
observado para o EKF.
UmaversãomodiadadoEKF,oInterlaedExtendedKalmanFilter é
apre-sentada notrabalhode Panzierieoutros(2005). Oprinípiobásiodesseestimador
é a divisão do sistema em partes que são proessadas paralelamente, a m de
estimaçãoótima. Assim,elaéadequadaparaouso emsistemasdetemporeal,onde
obaixo ustoomputaional éum requisito do sistema.
O SPKF (sigma-point Kalman lter), ou UKF é omparado ao EKF em
um trabalho que visa integrar GPS e INS utilizando sensores de baixo usto. Na
omparação,osautoresonluemqueoSPKFéumalgoritmodefáilimplementação
ede mais rápida onvergênia queo EKF [Liet al.,2006℄. O UKF, queé um ltro
de Kalmanparasistemasnão-linearestambémbaseado noálulode pontossigma,
é utilizado em omparação om o EKF no trabalho de Zhang e outros (2005). Os
resultadosobtidosmostramqueainertezanaestimaçãoobtidaomoUKFémenor
que a om o EKF para a onguração de sensores utilizada. Foram utilizados um
GPS, uma IMU e uma bússola digitalpara a loalizaçãode um veíulo terrestre.
As pesquisas sobre veíulos autnomos terrestres, que inluem fusão
senso-rial para loalização, reeberam um grande inentivo om a iniiativa da DARPA
(Defense Advaned Researh Projets Ageny) de promover desaos nessa área. A
DARPA é uma agênia de defesa ameriana responsável pelo desenvolvimento de
novas tenologias para uso militar. Os desaos da DARPA trouxeram avanços e
ampliaramadivulgaçãodaspesquisas. Oprimeirodesaofoipromovidoem2004,o
DARPA Grand Challenge,uma orridanaqualos veíulos deveriam perorrer uma
rotaespeiadaemumdesertodoestadodaCalifórnia,nosEstadosUnidos. Nesse
primeirodesao,nenhumdos veíulos onseguiuompletaraprova[DARPA, 2004℄.
Muitas equipes que partiiparam do desao de 2004 onorreram também na
se-gunda versão doDARPA Grand Challenge em 2005 e dentre elas, algumasse
las-siaram para a etapa nal do desao, omo a Axion Raing, a Insight Raing, o
Red Team, o Si Autonis II, o Team Calteh, o Team ENSCO, a Terra Max e o
The GolemGroup.
AequipeAxion Raingem2004utilizouomosensoresparaaloalizaçãoum
GPS-oCoremiroUNCUN1,daAmeriaGNC -integradoaumsistemaINS/IMU.
OsistemaCoremiro AHRS/INS/GPSIntegrationUnit produzinformaçãode
loa-lizaçãobaseada emumreeptorGPS de12anais(issosigniaqueoreeptorpode
se omuniar om até 12 satélites ao mesmo tempo). No momento em que o sinal
medidapeloGPS para enontrar sua posição atual. Para isso, o sistema utilizaum
algoritmoproprietáriodosistemadaCoremiro [Kehaly etal.,2004℄. Nodesaode
2005 a equipe deidiu utilizar outro modelo de sensor inerial, o Northrop
Grum-manLN270InertialNavigationSystem. Essesistemaaeitaentradasdeumreeptor
GPS e alula a posição baseado nos sensores ineriais quando o GPS tem o sinal
obstruído ou de má qualidade. Como reeptores GPS a equipe utilizou dois
equi-pamentosmodelo NavCom SF2050, que são ompatíveis om o sistemaINS. Nesse
veíulo, ossistemas de loalizaçãoe deteção de obstáulos funionamde forma
in-dependente, ou seja, o sistema de desvio de obstáulos não utiliza informações de
loalizaçãopara identiarbarreiras[Kehaly et al.,2005℄.
AequipeInsight Raing, nodesao de2004, tambémoptouporutilizarGPS
e INS omo prinipal sistema de loalização. Com esses sensores é possível obter
posição, direção e veloidade do veíulo. Ambos os sensores estão em um mesmo
equipamento, oPOS LV, daApplanix Corporation, quepossui omo prinipalfonte
de informaçãoossensores INS. Essa informaçãoéatualizadasemprequea
informa-ção de GPS está disponível. Se o sistema deixar de reeber informações de GPS,
apenas o INS é utilizado na loalização. A equipe arma que se a informação do
GPS não estiver disponívelpordois minutos, aindaassim a preisão daloalização
éde 0,60 metros. Oveíulo ontatambémom um enoder óptio quedetermina a
posição dovolante. Essa informaçãopode ser utilizadaemonjunto om o sistema
POS LV para melhorar a loalização em aso de perda do GPS [Randall,2004℄.
No ano de 2005 a equipe Insight Raing também alterou seu sistema de
loaliza-ção. Nesse ano, oveíulofoi equipadoom dois reeptores GPS om araterístias
omplementares. Ambossão apazes de utilizar o sistema WAAS e, no modo
dife-renial, podem hegar a uma preisão de aproximadamente 0,1 metros. O sistema
WAAS (Wide Area Augmentation System) é omposto por 25 estações terrestres,
loalizadas nos Estados Unidos, que enviam informações ao reeptor do GPS om
orreções para diminuir os erros de sua medida. Os modelos utilizados são o
No-vatel Propak LB plusGPS e o Garmin GPS 16A. O sistema de navegação inerial
utilizadoé o modelo Crossbow AHRS 400. Oalgoritmo de loalizaçãorealiza a
lizada[Randall etal., 2005℄.
O veíulo desenvolvido pelo Red Team em 2004 era equipado om Sistema
de Posição e Orientação baseado emGPS/INS hamado POS, da Applanix
Corpo-ration. Esse sistema é pareido om o utilizado pela equipe Insight Raing, porém
ontatambémom umindiador de distâniaperorrida (DMI- Distane
Measure-ment Indiator). Eleintegraasmedidasineriaise doDMIpara obtera estimativa
de posição e orientação entre uma medida de GPS e outra, utilizando o algoritmo
do ltro de Kalman [Whittaker, 2004℄. Em 2005 a equipe aresentou o álulo
daodometriaao sistemautilizando o ltro de Kalman e um reeptor GPS
diferen-ial (modelo Trimble AG132 om orreção Omnistar VBS, além de substituírem
o sistema POS pelo sistema POS LV, o mesmo utilizado em 2004 pela equipe
In-sight Raing que, segundo a equipe,fornee estimação de posição e orientação om
preisãode meio metro [Whittaker, 2005℄.
A equipe Si Autonis II utilizou em 2004 um reeptor GPS diferenial,
modeloNavom Starre SF-2050G, umaIMU, modelo RokwellCollins GMC-10, e
umodmetroinrementalquefornee adistâniaperorridapormeio de umsensor
de Efeito Hall, assumindo-se que não haja derrapagem no movimento. Em longas
distânias, o sistema GPS/IMU é utilizado. Um aelermetro destinado a medir a
rugosidadedoterrenofoiinstaladoparareduziroserrosdeintegraçãodaaeleração.
Oângulodovolanteémedidonaolunade atuaçãodomesmo. Naausênia desinal
GPS, é utilizadotambémum magnetmetro3D além daodometriae afusão entre
todos esses instrumentos também é realizada por meio do algoritmo do Filtro de
Kalman[Gunthner, 2004℄. Em2005 a equipe não modiouos sensores utilizados,
renandoapenas oalgoritmode fusão, queagorareebeumaonguraçãodiferente
paraamatrizdeovariânianoltrodeKalmandependendodainformaçãoqueestá
disponívelnaquele momento. CasooGPS nãoesteja disponívelnomododiferenial
ouno modonormal, a loalizaçãoé realizadaom a integração dos outros sensores
[Porter etal., 2005℄.
O Team Calteh também utiliza em seu veíulo um reeptor de GPS
dife-renial. Em asos de perda do sinal do GPS o veíulo onta om informações de
que o veíulo se enontra om veloidade zero, atualizando também a informação
deposiçãoforneidapeloGPS quandodisponível[van Gogh etal.,2004℄. Oveíulo
utilizadonodesaode 2005 ontou om os mesmosinstrumentosde 2004, um GPS
diferenial e uma IMU, que foram ombinados por meio do algoritmo do ltro de
Kalman para a obtenção da estimação dos estados. Essa estimação era enviada
por uma rede a todos os outros módulos presentes no veíulo, omo o módulo de
planejamento,porexemplo. Oveíuloreebeu tambémafunionalidadede
armaze-namentode informaçõesrelativas aos terrenos já visitados para utilizaçãoposterior
[Cremean etal.,2006℄.
O Team ENSCO utilizou, no primeiro desao, uma ombinação da posição
absoluta forneida por um GPS dotado de orreções Omnistar, WASS e função
diferenial dentro de uma área de obertura determinada, om um INS em que
o algoritmo de fusão utilizado também é o ltro de Kalman. Para aumentar a
preisão da posição e orientação do veíulo, o onjunto GPS+INS foi ombinado
om um radar 3D e um magnetmetro, obtendo preisão sub-métria. Os testes
realizados mostraram que quando a informação do GPS a indisponível por 30
segundos, o sistema é apaz de manter a estimação de posição 2D om preisão
inferiora1metro[Carr, 2004℄. Oveíuloquepartiipoudodesaode 2005também
utilizouaombinação GPS eINS, poréma ombinaçãoé realizadaporum sistema
Novatel SPAN (Synhronized Position Attitude Navigation), que fornee a posição
om grande preisão (10 m) a uma taxa de 20 Hz. A equipe notou que a falta do
sinalde GPS porum longo períodoausava um grandeaúmulode erros noálulo
daorientação. Parasoluionaresse problema,foraminstaladosdois reeptoresGPS
noveíulo. Com oveíulo parado,era alulado o vetor entre um reeptor e outro,
bemomoadistâniaentreeles. Casoadiferençaentreadistâniaaluladaeareal,
que era onheida, estivesse dentro do limite testado pela equipe, então o ângulo
do vetor obtido poderia ser onsiderado omo orreto, om alguns graus de erro.
Alémdisso, osegundo reeptor GPS funionariaomouma medidaredundante que
poderiaforneeraposiçãoemasodeindisponibilidadedesinalnoprimeiroreeptor
[Carr& Mee, 2005℄.
orreçõesOmnistarHP efunção diferenial. Esse modelo foibastante utilizadonos
veíulos desse desao. Para a obtenção dos ângulos de orientação nos três eixosfoi
utilizada uma bússola 3D. As aelerações e veloidades angulares foram medidas
utilizandoumaIMU. Aveloidadedas rodasfoiobtidapelobarramentodeontrole
doveíulo. NosinstantesemqueasmedidasdoGPSestãodisponíveis, aloalização
érealizadaapartirdessasmedidas. NosintervalosentreumamedidadeGPSeoutra,
é feito o dead rekoning das medidas da IMU. Essa informação é ombinada om
asmediçõesdabússola para obter a loalização[Fravert, 2004℄. Em2005, a equipe
optou por utilizar duas unidades de um sensor que faz a ombinação onboard de
GPS eIMU (modeloRT3100s,daOxford TehnialSolutions). Esse sensorfornee
a posição do veíulo em tempo real a uma taxa de 100 Hz mesmo que não haja
informaçãodoGPS. Um dos sensores foi ongurado para utilizaro GPS nomodo
diferenial e o outro para utilizar as orreções WAAS. No aso de perda do sinal
GPS,osensormantém aloalizaçãoutilizandoapenasaIMU. Para auxiliaraIMU,
aveloidadedas rodas éforneida omoentrada parao RT3100. Emaso de perda
de todoosistema RT3100, outro sistemabaseado emodometriaentra emoperação
apartir damedida das veloidadese ângulo das rodas [Braid etal.,2006℄.
A equipe The Golem Group partiipou do desao de 2004 om um veíulo
equipadoomumINS eummagnetmetrode trêseixos, ambosdaRotomotion,um
potenimetroque media aposição da olunade direçãodo veíulo e um sensor de
EfeitoHall(enoder) para medirarotação doeixo traseiro,alémde dois reeptores
GPS, o primeiro, modelo Trimble AgGPS 114, foi montado no teto do veíulo e o
segundo, modelo Garmin GPS V, é utilizadoomo bakup do sistema. Ambostêm
aapaidade derealizarorreçõesdifereniais. AsinformaçõesdosGPS difereniais
são ombinadas om a IMU e o enoder om a utilizaçãode um algoritmode
esti-mação hamado Interating Multiple Model (IMM), que utiliza diferentes modelos
seleionadospara ada situação. Nosmomentosde perda dosinal GPS, odead
re-koning é realizadoom as informaçõesda IMU e daodometria[Mason, 2004℄. Em
2005, a equipe modiou tanto o hardware quanto o algoritmode fusão utilizado.
OGPS foi substituído por um NovAtel Propak-LBPlus om orreção OmnistarHP
equipe arma que em ondições típias a estimação apresenta erros de loalização
inferioresa 30m [Mason etal.,2006℄.
A equipevenedora do desao de 2005 foi a Stanford RaingTeam, om seu
veíulo Stanley, que não havia partiipado do desao de 2004. A loalização teve
omoprinipalfontedeinformaçãoum reeptor GPS,euma IMU,omo nasoutras
equipes, porém o algoritmode estimação de estados utilizadonafusão sensorialfoi
ounsented Kalman lter (UKF) [Thrun etal., 2005℄[Julier & Uhlmann,2004℄. O
UKFéutilizadoparaintegrarde formaassínronaosdadosdoGPS, dadosdaIMU
e informaçõesprovenientes do barramentoCAN do veíulo a uma taxa máxima de
100Hz. Omodeloutilizadonoalgoritmoparaapredição dosestadoséo modelode
Akerman [Thrun et al.,2006℄.
No ano de 2007, a DARPA promoveu um tereiro desao de veíulos
au-tnomos terrestres, mas dessa vez em área urbana. O DARPA Urban Challenge
reuniu 89 equipes em um iruito onde as regras para o trânsito em vias urbanas
deveriam ser respeitadas [Buehler etal., 2008℄. A equipe venedora desse desao
foi a Tartan Raing, da Universidade Carnegie Mellon, om seu arro Boss. Essa
equipe utilizou a solução omerialPOSLV, da Applannix omo prinipalfonte de
informação para a loalização. Esse sistema fornee informação de posição a uma
taxa de 100Hz baseado em um GPS diferenial, sensores ineriais e enoders nas
rodas. Além do sistema de loalização, a equipe utilizou vários meanismos de
de-teção de obstáulos e deteção de bordas da pista. Outras informações quanto à
geometria e o relevo da pista são utilizadas para ltrar e melhorar o sistema de
loalização[Urmson etal.,2008℄.
A equipe da Universidade de Stanford, venedora do desao de 2005, ou
em segundo lugar no desao de 2007, om seu arro Júnior. Esse veíulo realiza a
estimação da loalização em relação a um mapa forneido previamente om o uso
dosistemade loalizaçãodaApplannix (omesmoutilizadonamaioria dos veíulos
partiipantes dos desaos DARPA). Oveíuloveria oalinhamentoentre osensor
de loalizaçãoeo mapa,ou seja,elese loalizaemrelação aesse mapa para denir
seus movimentos [Montemerloet al.,2008℄.