An´
alise global de sistemas quadr´
aticos e c´
ubicos com
duas circunferˆ
encias n˜
ao-concˆ
entricas invariantes
Alisson de Carvalho Reinol
Orientador: Prof. Dr. Marcelo Messias
An´
alise global de sistemas quadr´
aticos e c´
ubicos com
duas circunferˆ
encias n˜
ao-concˆ
entricas invariantes
Alisson de Carvalho Reinol Orientador: Prof. Dr. Marcelo Messias
Disserta¸c˜ao submetida ao Pro-grama de P´os-Gradua¸c˜ao em Matem´atica Aplicada e Computa-cional da Faculdade de Ciˆencias e Tecnologia - FCT/UNESP, Cam-pus de Presidente Prudente, como parte dos requisitos para obten¸c˜ao do T´ıtulo de Mestre em Matem´atica Aplicada e Computacional.
FICHA CATALOGRÁFICA
Reinol, Alisson de Carvalho.
R295a Análise global de sistemas quadráticos e cúbicos com duas
circunferências não-concêntricas invariantes / Alisson de Carvalho Reinol. - Presidente Prudente : [s.n], 2014
78 f. : il.
Orientador: Marcelo Messias
Dissertação (mestrado) - Universidade Estadual Paulista, Faculdade de Ciências e Tecnologia
Inclui bibliografia
´
E dif´ıcil agradecer em poucas palavras a todos que, de alguma forma, contribu´ıram para a realiza¸c˜ao deste trabalho. Portanto, desde j´a, gostar´ıa de deixar aqui meus sinceros agradecimentos a todos aqueles que estiveram ao meu lado nas horas serenas e apreensivas e que me ajudaram a vencer mais esta etapa.
Dediquei este trabalho `a minha m˜ae, Concei¸c˜ao, e `a minha av´o, Lour-des, e gostaria, tamb´em, de agradecˆe-las pela paciˆencia, pelo incentivo, pela for¸ca e pelo carinho. Gostar´ıa de agradecer a toda minha fam´ılia tios, tias, primos, primas, a minha bisav´o e, em especial, ao meu tio, Jos´e Elias (in memoriam).
Agrade¸co ao meu orientador, professor Marcelo Messias, por acredi-tar em mim e partilhar comigo suas ideias, conhecimentos e experiˆencia. Quero expressar o meu reconhecimento e admira¸c˜ao pela sua competˆencia profissional e minha gratid˜ao pela sua amizade e por fazer parte de v´arias das minhas conquistas. Agrade¸co, tamb´em, ao professor Jaume Llibre, pela oportunidade de estagiar na UAB sob sua orienta¸c˜ao, por me receber de forma t˜ao receptiva e por tudo que me ensinou durante este per´ıodo, o qual foi muito importante para o meu crescimento profissional.
Gostar´ıa de agradecer a todos os meus professores, desde aqueles da educa¸c˜ao b´asica at´e os da p´os-gradua¸c˜ao, pelos ensinamentos e dedica¸c˜ao, pois gra¸cas a eles cheguei at´e aqui. Em especial, `as professoras Luiza e Vanderloisa, que sempre acreditaram no meu potencial. Aos docentes do Departamento de Matem´atica e Computa¸c˜ao, minha inspira¸c˜ao. A todos eles minha profunda gratid˜ao e respeito.
Agrade¸co a todos os meus colegas de turma, do ensino b´asico, gradua¸c˜ao e p´os-gradua¸c˜ao, por tornarem a caminhada menos dif´ıcil, compartilhando sonhos, expectativas, risos, ansiedades e ang´ustias p´os-provas. Em especial, agrade¸co ao Alex, Bianca, Tha´ısa, por mostrarem que a amizade pode sobre-viver ao tempo, mesmo que sigamos caminhos diferentes; ao Wesley, K´atia, Luis, Eduardo, Renata, La´ıza e todos os meus colegas de gradua¸c˜ao, por
aprendermos e ensinarmos muito uns aos outros durante aquele per´ıodo; aos irm˜aos que ganhei no Mestrado, Patr´ıcia, Juliano, Marluce; a todos os colegas da terceira turma do P´os-MAC, principalmente `aqueles que tive mais con-tato: Rafael, Daiane, Irineu, Z´e, Hemily, Mariane, Luana, Luciene, Gabriella, Mar´ılia; e tamb´em aos colegas da primeira, segunda e quarta turma do P´os-MAC, os quais tive o prazer de conviver.
Gostar´ıa de agradecer `a FAPESP pelo apoio financeiro.
Agrade¸co aos funcion´arios da Se¸c˜ao de P´os-Gradua¸c˜ao e do Escrit´orio de Pesquisa pela aten¸c˜ao e paciˆencia em sanar todas as d´uvidas burocr´aticas, `as secret´arias da Dire¸c˜ao, em especial, `a Vera, por sempre arranjar espa¸co na agenda do meu orientador para uma reuni˜ao.
(Henry Ford)
Neste trabalho, realizamos o estudo global de sistemas diferenciais polinomiais planares quadr´aticos e c´ubicos com duas circunferˆencias n˜ao-concˆentricas como curvas alg´ebricas invariantes. Apresentamos todos os poss´ıveis retratos de fase dos campos vetoriais polinomiais associados a tais sistemas no disco de Poincar´e. Mostramos que existem 3 classes de equivalˆencia topol´ogica para o caso quadr´atico e 19 classes de equivalˆencia topol´ogica para o caso c´ubico. Como uma consequˆencia deste estudo, provamos que estes sis-temas diferenciais polinomiais n˜ao apresentam ciclos limites.
Palavras-chave: Sistemas diferenciais polinomiais, curvas alg´ebricas invari-antes, ciclos limites, compactifica¸c˜ao de Poincar´e.
In this work, we perform a global study of quadratic and cubic planar polynomial differential systems having two nonconcentric circles as invariant algebraic curves. We give all possible global phase portraits on the Poincar´e disk of the polynomial vector fields associated to these systems. We show that there exist 3 topological equivalent classes for quadratic cases and 19 topological equivalent classes for cubic ones. As a consequence, we prove that these polynomial differential systems have no limit cycles.
Keywords: Polynomial differential systems, invariant algebraic curves, limit cycles, Poincar´e compactification.
Quando estudamos matematicamente fenˆomenos naturais que envolvem varia¸c˜oes de grandezas f´ısicas com o tempo, somos levados ao estudo da derivada como taxa de varia¸c˜ao e, consequentemente, ao estudo das equa¸c˜oes diferenciais, que s˜ao utilizadas na modelagem matem´atica de fenˆomenos na-turais relacionados a diversas ´areas do conhecimento.
Neste contexto, o estudo de sistemas planares de equa¸c˜oes diferenciais ordin´arias, da forma
˙
x=f(x, y),
˙
y=g(x, y), (1)
onde f eg s˜ao fun¸c˜oes de classeCk, k≥1, definidas em um abertoU doR2,
´e bastante importante, tanto do ponto de vista te´orico quanto das aplica¸c˜oes dos m´etodos matem´aticos na modelagem e an´alise de fenˆomenos naturais das ciˆencias em geral. Ao sistema (1), est´a naturalmente associado o campo vetorial X(x, y) = (f(x, y), g(x, y)).
No caso em que as fun¸c˜oes f e g s˜ao polinˆomios nas vari´aveis x e y, o sistema (1) ´e chamado de sistema diferencial polinomial de grau d, onde
d= max{grau(f),grau(g)}(analogamente, o campo vetorialX´e chamado de
campo vetorial polinomial de grau d). Muitos modelos matem´aticos determi-nados por sistemas planares de equa¸c˜oes diferenciais ordin´arias encontrados na literatura s˜ao polinomiais.
A classifica¸c˜ao topol´ogica de sistemas diferenciais polinomiais lineares no plano ´e completamente conhecida, podendo ser encontrada em diversos livros como, por exemplo, nos Cap´ıtulos 7 e 9 de [1], no Cap´ıtulo 1 de [14], no Cap´ıtulo 1 de [27] e no Cap´ıtulo 3 de [30]. Por´em, a classifica¸c˜ao topol´ogica de sistemas polinomiais planares de grau d ≥ 2 ainda ´e um problema em aberto dentro da Teoria Qualitativa das Equa¸c˜oes Diferenciais Ordin´arias.
Nos ´ultimos anos, o caso quadr´atico, ou seja, o caso em qued= 2, tem sido intensamente estudado, havendo milhares de artigos publicados sobre o assunto. Mesmo assim, a classica¸c˜ao completa dos sistemas diferenciais
polinomiais quadr´aticos ainda ´e desconhecida. Deste modo, surge o interesse em estudar classes particulares destes sistemas, com propriedades especiais como, por exemplo, a existˆencia de integrais primeiras, invariantes de Dar-boux, curvas alg´ebricas invariantes.
´
E importante notar que a existˆencia de curvas alg´ebricas invariantes influencia bastante o comportamento das solu¸c˜oes de um sistema diferencial polinomial planares. Por exemplo, um sistema quadr´atico com uma elipse, hip´erbole ou duas retas como curvas alg´ebricas invariantes n˜ao tem ciclos limites (exceto, talvez, a pr´opria curva) [13], enquanto a existˆencia de uma reta invariante faz com que o sistema tenha no m´aximo um ciclo limite [5, 6, 12, 28]. Os resultados sobre as consequˆencias advindas da existˆencia de uma hip´erbole invariante em um sistema diferencial polinomial quadr´atico foram apresentadas em [4]; sistemas quadr´aticos que possuem uma elipse como curva alg´ebrica invariante foram estudados em [7]; com uma par´abola invariante em [8] e [32] e com duas retas invariantes em [2].
Este trabalho ´e parte de um estudo mais amplo sobre o significado da existˆencia de curvas alg´ebricas invariantes em sistemas diferenciais polino-miais. Aqui, consideramos o caso em que tais sistemas s˜ao quadr´aticos ou c´ubicos, ou seja, de grau 2 ou 3, respectivamente, e apresentam duas circun-ferˆencias n˜ao-concˆentricas como curvas alg´ebricas invariantes. Como j´a era esperado, a existˆencia de tais curvas tem implica¸c˜oes consider´aveis no com-portamento global das solu¸c˜oes do sistema e, em particular, na existˆencia ou n˜ao de ciclos limites, o que est´a relacionado ao famoso 16◦ Problema de Hilbert [18, 19].
Esta disserta¸c˜ao est´a estruturada da seguinte maneira:
No Cap´ıtulo 1, apresentamos a compactifica¸c˜ao de Poincar´e, t´ecnica que permite o estudo qualitativo global das solu¸c˜oes de campos vetoriais polinomiais, inclusive daquelas ilimitadas, que tendem para o infinito e que n˜ao poderiam ser estudadas em regi˜oes compactas do plano.
No Cap´ıtulo 2, falamos a respeito de outra t´ecnica, conhecida como
tradicional, via lineariza¸c˜ao.
Em seguida, no Cap´ıtulo 3, apresentamos alguns conceitos e resulta-dos da teoria de integrabilidade de Darboux, teoria esta que permite uma liga¸c˜ao entre a integrabilidade de campos vetoriais polinomiais e suas curvas alg´ebricas invariantes.
Introdu¸c˜ao vii
1 Compactifica¸c˜ao de Poincar´e 1
1.1 Cartas locais . . . 2
1.2 Pontos singulares no infinito . . . 6
1.3 Aplica¸c˜oes da compactifica¸c˜ao de Poincar´e . . . 9
1.4 Compactifica¸c˜ao em coordenadas polares . . . 16
1.5 O programa P4 . . . 18
2 Desingulariza¸c˜ao de pontos singulares n˜ao-elementares 20 2.1 Blow-up polar . . . 21
3 Integrabilidade de Darboux 25 3.1 Integrais primeiras e invariantes . . . 26
3.2 Fatores integrantes . . . 33
3.3 Curvas Alg´ebricas Invariantes . . . 34
3.4 Fatores exponenciais . . . 40
3.5 O m´etodo de Darboux . . . 43
4 Sistemas quadr´aticos e c´ubicos com duas circunferˆencias n˜ ao-concˆentricas invariantes 52 4.1 Forma normal . . . 57
4.2 Sobre a n˜ao-existˆencia de ciclos limites . . . 59
4.3 Sistemas quadr´aticos com duas circunfe-rˆencias n˜ao-concˆentricas invariantes . . . 60
4.4 Sistemas c´ubicos com duas circunferˆencias n˜ao-concˆentricas invariantes . . . 64
Considera¸c˜ao finais 74
1.1 Proje¸c˜ao central. . . 3
1.2 Cartas locais. . . 4
1.3 Sela-n´o do tipo SN1 e SN2, respectivamente, de p(X) no equador de S2. . . . 8
1.4 Retrato de fase do sistema (1.5): A origem ´e um ponto de sela. 9 1.5 Retrato de fase do sistema (1.5) no disco de Poincar´e. . . 10
1.6 Retrato de fase do sistema (1.6): A origem ´e um n´o repulsor. . 11
1.7 Retrato de fase do sistema (1.6) no disco de Poincar´e. . . 12
1.8 Retrato de fase do sistema (1.7): A origem ´e um foco inst´avel. 12 1.9 Retrato de fase do sistema (1.7) no disco de Poincar´e. . . 13
1.10 Retrato de fase do sistema (1.8): A origem ´e um centro. . . 14
1.11 Retrato de fase do sistema (1.8) no disco de Poincar´e. . . 14
1.12 Retrato de fase do sistema (1.9) no plano. . . 15
1.13 Retrato de fase do sistema (1.9) no disco de Poincar´e. . . 16
1.14 Mudan¸ca de vari´aveis introduzida pelo sistema (1.10). . . 17
1.15 Painel de controle principal do programa P4. . . 19
2.1 Representa¸c˜ao do que acontece com a origem. . . 21
2.2 Blow-up polar na origem do sistema (2.6). . . 24
2.3 Blow-up polar na origem do sistema (2.9). . . 24
3.1 Gr´afico da fun¸c˜ao H1 e retrato de fase do campo vetorial X, com a=b= 1. . . 30
3.2 Gr´afico da fun¸c˜ao H2 e retrato de fase do campo vetorial Y, com a=b= 1. . . 31
3.3 Gr´afico da fun¸c˜ao H e retrato de fase do campo vetorial X. . . 32
4.1 (i) Transla¸c˜ao, (ii) Homotetia, (iii) Rota¸c˜ao. . . 53
4.2 Poss´ıveis posi¸c˜oes relativas entre as circunferˆencias C1 e C2 dadas em (4.2). . . 54 4.3 Poss´ıveis retratos de fase do sistema (4.3) no disco de Poincar´e. 56
4.4 Blow-up polar do ponto singular R1. . . 63
4.5 Diagrama de bifurca¸c˜ao do sistema (4.6). . . 64 4.6 Retratos de fase do sistema (4.6) no disco de Poincar´e,
rela-cionados com cada regi˜ao descrita na Figura 4.5. . . 65 4.7 Retratos de fase do sistema (4.10) no disco de Poincar´e. A
curva pontilhada representa a circunferˆencia C2, a qual ´e
in-teiramente constitu´ıda por pontos singulares. . . 66 4.8 Retratos de fase no disco de Poincar´e do sistema (4.12) com
apenas pontos singulares elementares. . . 71 4.9 Pontos singulares n˜ao-elementares do sistema (4.12). . . 72 4.10 Retratos de fase no disco de Poincar´e do sistema (4.12) com
pontos singulares n˜ao-elementares (A= 0 e D̸= 0). . . 72 4.11 Retratos de fase no disco de Poincar´e do sistema (4.12) com
pontos singulares n˜ao-elementares (D= 0 e A̸= 0). . . 73 4.12 Retratos de fase no disco de Poincar´e do sistema (4.12) com
1
Compactifica¸
c˜
ao de Poincar´
e
No estudo do retrato de fase de campos vetoriais polinomiais definidos no planoR2, constatemente aparecem solu¸c˜oes ilimitadas que tendem para o
infinito e que, portanto, n˜ao podem ser completamente estudadas em regi˜oes compactas do plano. Por´em, existem t´ecnicas de compactifica¸c˜ao, como a compactifica¸c˜ao de Poincar´e, de Poincar´e-Lyapunov e de Bendixson, que nos permitem estudar completamente tais solu¸c˜oes. Neste cap´ıtulo, estudaremos com maior detalhe a compactifica¸c˜ao de Poincar´e, que associa a cada ponto do plano R2 um ponto da esfera unit´aria centrada na origem do espa¸co R3,
conhecida como esfera de Poincar´e, de tal maneira que o equador da esfera fica associado aos pontos localizados no infinito do R2. A compactifica¸c˜ao
de Poincar´e-Lyapunov foi desenvolvida posteriormente `a compactifica¸c˜ao de Poincar´e e utiliza a mesma ideia, por´em, a partir de uma constru¸c˜ao mais abstrata. A vantagem ´e que, as vezes, ela torna o estudo das singularidades localizadas no infinito mais f´acil do que na t´ecnica anterior. Detalhes sobre a compactifica¸c˜ao de Poincar´e-Lyapunov e de Bendixson s˜ao encontradas no Cap´ıtulo 5 de [16].
Em s´ıntese, a compactifica¸c˜ao de Poincar´e consiste em mudan¸cas de vari´aveis seguidas de uma multiplica¸c˜ao por uma fun¸c˜ao positiva, que trans-forma o campo vetorial no plano R2 em um campo vetorial definido no disco
de Poincar´e, cuja fronteira corresponde ao equador da esfera de Poincar´e (ou seja, aos pontos do R2 no infinito).
Com o advento dos recursos computacionais, o estudo de campos ve-toriais polinomiais no disco de Poincar´e pode ser feito utilizando-se o pro-grama P4 – Planar Polynomial Phase Portraits, desenvolvido em conjunto por pesquisadores da Espanha e da B´elgica e dispon´ıvel gratuitamente no
endere¸co http://mat.uab.es/∼artes/p4/p4.htm, da Universidade Autˆonoma de Barcelona. Um tutorial deste programa est´a dispon´ıvel no Cap´ıtulo 9 de [16].
A seguir, faremos a constru¸c˜ao da compactifica¸c˜ao de Poincar´e, seguindo o que ´e feito no Cap´ıtulo 5 de [16], no artigo [20] e no Cap´ıtulo 1 de [29], e apresentaremos algumas aplica¸c˜oes de tal t´ecnica.
1.1
Cartas locais
Consideremos o sistema de equa¸c˜oes diferenciais ordin´arias de primeira ordem em duas vari´aveis reais dado por
˙
x1 =P(x1, x2),
˙
x2 =Q(x1, x2),
(1.1)
onde as fun¸c˜oesP eQs˜ao polinˆomios de grau arbitr´ario nas vari´aveisx1 ex2.
Ao sistema (1.1) est´a naturalmente associado um campo vetorial polinomial
X(x1, x2) = (P(x1, x2), Q(x1, x2)). Dizemos que o grau de X ´e d, se d =
max{grau(P),grau(Q)}.
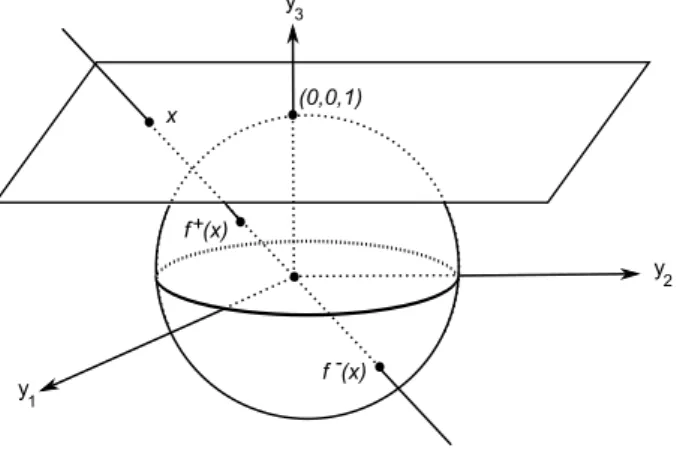
EmR3, consideremos a esferaS2 ={y= (y1, y2, y3)∈R3 :y2
1+y22+y23 =
1}, a qual chamaremosesfera de Poincar´e, e oR2como sendo o plano contido
noR3 tangente `a esferaS2 no ponto (0,0,1), ou seja,R2 ={y∈R3 :y3 = 1}.
Podemos dividir a esfera de Poincar´e emH+ ={y∈S2 :y3 >0} (hemisf´erio
norte), H− = {y ∈ S2 : y3 < 0} (hemisf´erio sul) e S1 = {y ∈ S2 : y3 = 0}
(equador). A proje¸c˜ao do campo vetorial X deR2 em S2 ´e obtida usando as
proje¸c˜oes centrais f+ :R2 →S2 ef− :R2 →S2, onde f+ (respectivamente,
f−) ´e dada pela intersec¸c˜ao da reta que passa pelo pontox= (x
1, x2,1) e pela
origem do R3 com o hemisf´erio norte (respectivamente, sul) de S2, conforme
a Figura 1.1. Obtemos facilmente as express˜oes destas proje¸c˜oes como sendo
f+(x) = 1
∆(x)(x1, x2,1),
f−
(x) =− 1
∆(x)(x1, x2,1), onde ∆(x) =√x2
x
f (x)+
f (x) -(0,0,1)
y
1
y
2
y
3
Figura 1.1: Proje¸c˜ao central.
Deste modo, obtemos um campo vetorial induzido em cada hemisf´erio de S2, analiticamente conjugados ao campo vetorialX, dados por
¯
X(y) = Df+(x)X(x) se y=f+(x)∈H+
e
¯
X(y) =Df−
(x)X(x) se y=f−
(x)∈H−.
Assim, obtemos um campo vetorial polinomial ¯X definido em S2 \S1, ou
seja, em H+∪H−. Por´em, para estudarmos o comportamento das solu¸c˜oes
ilimitadas de X que tendem para o infinito do R2, precisamos estender o
campo vetorial ¯X para o equadorS1, obtendo, assim, um campo vetorial em S2.
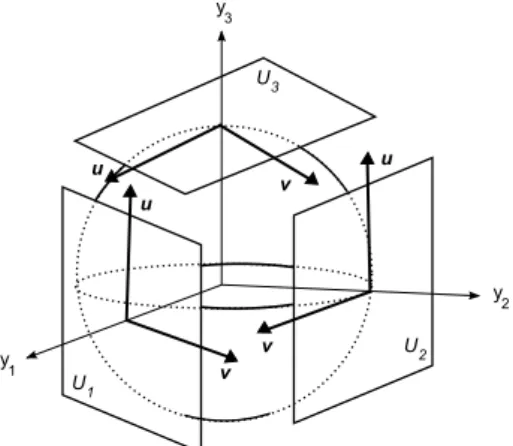
Como ´e usual com superf´ıcies curvas, usaremos cartas para fazer os c´alculos. Para S2 usaremos seis cartas locais dadas por Uk ={y ∈S2 :yk >
0} e Vk = {y ∈ S2 : yk < 0}, com k = 1,2,3. Sejam φk : Uk → R2 e
ψk:Vk →R2 aplica¸c˜oes definidas por
φk(y) = −ψk(y) =
(
ym
yk
,yn yk
)
com m < n e m, n ̸= k. Denotaremos por z = (u, v) o valor de φk(y) ou
ψk(y) para qualquer k, tal que (u, v) ter´a diferentes significados dependendo
u v u u v v U1 U 2 U 3 y 3 y 2 y 1
Figura 1.2: Cartas locais.
A seguir, faremos o c´alculo detalhado para obtermos a express˜ao de
p(X) na carta local U1, onde p(X) ´e o campo vetorial compactificado obtido
a partir de X. Temos que X(x) = (P(x1, x2), Q(x1, x2)). Ent˜ao, ¯X(y) =
Df+(x)X(x) com y=f+(x) e
¯
X|U1 =Dφ1(y) ¯X(y) = Dφ1(y)◦Df
+(x)X(x) =D(φ
1◦f+)(x)X(x).
Como k= 1 e lembrando que m < n,m, n̸=k e m, n= 1,2,3, ent˜ao
(φ1◦f+)(x) =
(
y2
y1
,y3 y1 ) = ( x2 x1 , 1 x1 )
= (u, v).
Assim, temos que
¯
X|U1 =
∂u ∂x1 ∂u ∂x2 ∂v ∂x1 ∂v ∂x2
X(x) =
−x2
x2 1 1 x1 − 1 x2 1 0
P(x1, x2)
Q(x1, x2)
= v2
( −uvP
( 1 v, u v ) + 1 vQ ( 1 v, u v )
,−P
( 1 v, u v )) .
Observe que a equa¸c˜ao n˜ao est´a definida para v = 0. Para estendˆe-la para estes valores, multiplicamos o campo vetorial pelo fator ρ(y) = yd−1
3 ,
onde d ´e o grau de X. Assim,
ρ(y) =yd−1
3 =
com
∆(x) =
√
x2
1+x22 + 1 =
1
v
√
1 +u2+v2.
Logo,
ρ(y) = 1 ∆(x)d−1 =
1
(1
v
√
1 +u2+v2)d−1
=vd−1(1+u2+v2)(1−d)/2 =vd−1m(z),
onde m(z) = (1 +u2+v2)(1−d)/2.
Deste modo,
ρ( ¯X|U1)(z) =v
d+1m(z)
( −uvP
( 1 v, u v ) +1 vQ ( 1 v, u v )
,−P
( 1 v, u v )) .
A express˜ao de p(X) na carta (U1, φ1) ´e dada por
˙
u=vd+1
( −uvP
( 1 v, u v ) + 1 vQ ( 1 v, u v )) , ˙
v =vd+1
( −P ( 1 v, u v )) , ou seja, ˙
u=vd
( −uP ( 1 v, u v ) +Q ( 1 v, u v )) , ˙
v =−vd+1P
( 1 v, u v ) . (1.2)
Analogamente ao que foi feito na cartaU1, obtemos que a express˜ao de
p(X) na carta U2 ´e dada por
˙
u=vd
( P ( u v, 1 v ) −uQ ( u v, 1 v )) , ˙
v =−vd+1Q
( u v, 1 v ) , (1.3)
e na carta U3 ´e dada por
˙
u=P(u, v),
˙
v =Q(u, v). (1.4)
Note que a express˜ao de p(X) na carta U3 coincide com a express˜ao de
k = 1,2,3, s˜ao as mesmas das cartas Uk correspondentes, multiplicadas por
(−1)d−1.
Para o estudo completo do campo vetorial X no plano R2, incluindo o
comportamento das solu¸c˜oes em regi˜oes pr´oximas ao infinito, ´e suficiente tra-balhar com H+∪S1, pois as solu¸c˜oes do campo vetorial emS2 s˜ao sim´etricas
com rela¸c˜ao `a origem. Chamaremos a proje¸c˜ao ortogonal deH+∪S1 no disco
unit´ario centrado na origem do R3 dedisco de Poincar´e.
1.2
Pontos singulares no infinito
Seja ∆ um subconjunto aberto do R2 e X : ∆→ R2 o campo vetorial
polinomial associado ao sistema (1.1). Um ponto x = (x1, x2) ∈ ∆ tal que
X(x) = (0,0) ´e chamado de ponto singular (singularidade, ponto cr´ıtico ou
ponto de equil´ıbrio) de X. O ponto sigular x ´e dito hiperb´olico se os dois autovalores de DX(x) tˆem parte real diferente de zero e semi-hiperb´olico se exatamente um dos autovalores de DX(x) ´e igual a zero, onde
DX(x) =
∂P ∂x1
(x) ∂P
∂x2
(x)
∂Q ∂x1
(x) ∂Q
∂x2
(x)
.
Chamamos DX(x) de matriz Jacobiana do campo X (ou do sistema (1.1))
aplicada no ponto x.
Dizemos que umponto singular deX ou p(X) est´a no infinito quando est´a localizado no equador (S1) da esfera de Poincar´e. Note que se y ∈S1 ´e
um ponto singular no infinito, ent˜ao −y tamb´em o ser´a. O comportamento do campo pr´oximo de −y ´e igual ao comportamento do campo pr´oximo de
y multiplicado por (−1)d−1, onde d ´e o grau do campo vetorial estudado.
Assim, a orienta¸c˜ao continua a mesma quando o grau d do campo vetorial ´e ´ımpar e ´e invertida quando o grau ´e par. Por exemplo, se d ´e par e y ∈ S1
Os pontos singulares localizados no equador da esfera de Poincar´e es-tar˜ao nas cartas U1, U2, V1 ou V2 e s˜ao da forma (u,0), com u ∈ R. Sejam
Pi e Qi os polinˆomios homogˆeneos de grau i, com i = 0,1, ..., d, tais que
P =P0+P1+...+Pd e Q=Q0+Q1+...+Qd s˜ao dados em (1.2) e (1.3).
Como Pi e Qi s˜ao polinˆomios homogˆeneos de grau i, temos que
Pi
(
1
v, u v
)
= 1
viPi(1, u) e Qi
(
1
v, u v
)
= 1
viQi(1, u).
Assim, a partir da equa¸c˜ao (1.2), temos que (u,0) ∈ S1 ∩(U1 ∪V1) ´e
um ponto singular no infinito, se, e somente se,
F(u)≡Qd(1, u)−uPd(1, u) = 0.
Analogamente, a partir da equa¸c˜ao (1.3), temos que (u,0)∈S1∩(U2∪
V2) ´e um ponto singular no infinito, se, e somente se,
G(u)≡Pd(u,1)−uQd(u,1) = 0.
Al´em disso, a matriz jacobiana do campo vetorialp(X) no ponto (u,0) ´e dada por
F′(u) Q
d−1(1, u)−uPd−1(1, u)
0 −Pd(1, u)
se (u,0) pertence aU1∪V1, ou
G′(u) P
d−1(u,1)−uQd−1(u,1)
0 −Qd(u,1)
se (u,0) pertence aU2∪V2.
Note que, em alguns casos, o equador deS2 pode consistir inteiramente
de pontos singulares. De todos os pontos singulares semi-hiperb´olicos e, dentre estes os pontos singulares hiperb´olicos, apenas n´os e selas podem aparecer no infinito. Temos que, se um dos pontos singulares hiperb´olicos ou semi-hiperb´olicos no infinito for topologicamente uma sela, ent˜ao a reta {v = 0}, ou seja, o equador da esfera S2, ´e necessariamente uma variedade
para os pontos singulares semi-hiperb´olicos do tipo sela-n´o. Al´em disso, dependendo do seu comportamento, classificamos os pontos singulares do tipo sela-n´o em dois tipos: SN1, quando a matriz Jacobiana ´e da forma
λ ∗
0 0
,
com λ ̸= 0, ouSN2, quando a matriz Jacobiana ´e da forma
0 ∗
0 λ
,
com λ ̸= 0. Os dois casos s˜ao representados na Figura 1.3.
Figura 1.3: Sela-n´o do tipoSN1 eSN2, respectivamente, dep(X) no equador de S2.
1.3
Aplica¸
c˜
oes da compactifica¸
c˜
ao de Poincar´
e
Nesta se¸c˜ao, utilizaremos a compactifica¸c˜ao de Poincar´e para determi-nar o comportamento global de alguns campos vetoriais polinomiais. Apre-sentamos casos de campos vetoriais lineares, cuja origem ´e, respectivamente, um ponto de sela, um n´o, um foco e um centro, e, por fim, um caso de um campo vetorial n˜ao-linear.
Nos exemplos a seguir, os retratos de fase dos campos vetoriais no plano s˜ao feitos com o uso do programa Maple (para maiores informa¸c˜oes sobre o uso deste programa no estudo de equa¸c˜oes diferenciais veja [26]) e os retratos de fase dos campos vetoriais no disco de Poincar´e s˜ao feitos com o aux´ılio do programa P4, o qual abordaremos com mais detalhes na Se¸c˜ao 1.5.
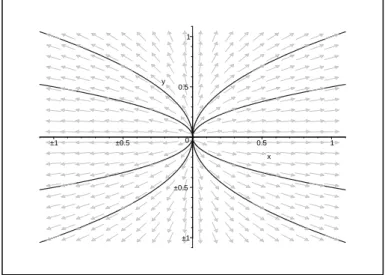
Exemplo 1 Considere o sistema diferencial linear
˙
x=x,
˙
y=−y. (1.5)
Note que a origem ´e o ´unico ponto singular do sistema (1.5) e trata-se de um ponto de sela. O retrato de fase no plano do sistema (1.5)´e dado pela Figura 1.4.
–1 –0.5 0 0.5 1
y
–1 –0.5 0.5 1
x
Usando a equa¸c˜ao (1.2), obtemos a express˜ao dep(X) na carta localU1
˙
u=−2u,
˙
v =−v.
Assim, h´a um ´unico ponto singular em U1, a origem, que ´e um n´o atrator.
Como o grau de X ´e ´ımpar, ent˜ao a origem de V1 ´e, tamb´em, um n´o atrator.
A express˜ao de p(X) na carta U2 ´e, usando a equa¸c˜ao (1.3), dada por
˙
u= 2u,
˙
v =v.
Portanto, o ´unico ponto singular em U2 ´e a origem, donde temos um n´o
repulsor. O mesmo ´e verdade para a origem de V2.
Observe que o estudo do sistema (1.5) nas cartas U3 e V3 ´e an´alogo ao
feito no plano.
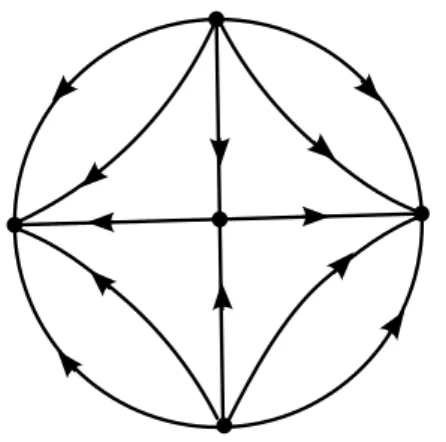
Assim, com base nestes c´alculos, podemos desenhar o retrato de fase do sistema (1.5) no disco de Poincar´e, que ´e mostrado na Figura 1.5. Note que as ´unicas separatrizes do sistema (1.5) s˜ao aquelas do ponto de sela e est˜ao contidas nos eixos invariantes x= 0 e y = 0.
Figura 1.5: Retrato de fase do sistema (1.5) no disco de Poincar´e.
Exemplo 2 Considere o sistema diferencial linear
˙
x= 2x,
˙
Apenas a origem ´e ponto singular do sistema (1.6) e trata-se de um n´o re-pulsor. O retrato de fase do sistema (1.6) no plano ´e dado pela Figura 1.6.
–1 –0.5 0 0.5 1
y
–1 –0.5 0.5 1
x
Figura 1.6: Retrato de fase do sistema (1.6): A origem ´e um n´o repulsor.
A express˜ao de p(X) na carta U1 ´e
˙
u=−u,
˙
v =−2v.
Assim, a origem ´e o ´unico ponto singular em U1 e seu comportamento ´e de
n´o atrator. O mesmo ´e v´alido na carta V1.
Na carta local U2, a express˜ao de p(X) ´e dada por
˙
u=u,
˙
v =−v.
Verifica-se que o ´unico ponto singular em U2 ´e a origem e ela ´e um ponto de
sela. O mesmo ocorre na carta V2.
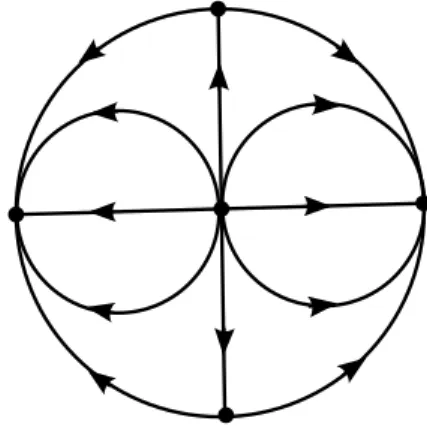
Desta forma, o retrato de fase do sistema (1.6) no disco de Poincar´e ´e dado pela Figura 1.7.
Exemplo 3 Considere o sistema diferencial linear
˙
x=x−y,
˙
Figura 1.7: Retrato de fase do sistema (1.6) no disco de Poincar´e.
Temos que apenas a origem ´e ponto singular do sistema (1.7)e ela ´e um foco inst´avel. O retrato de fase do sistema (1.7) no plano ´e dado pela Figura 1.8.
–1 –0.5 0 0.5 1
y
–1 –0.5 0.5 1
x
Figura 1.8: Retrato de fase do sistema (1.7): A origem ´e um foco inst´avel.
A express˜ao de p(X) na carta local U1 ´e dada por
˙
u=u2−u+ 1,
˙
v =−v +uv,
enquanto na carta U2 ´e dada por
˙
u=−u2+u−1,
˙
Assim, podemos notar que p(X) n˜ao possui pontos singulares nas cartas U1
e U2. O mesmo ´e verdade para as cartas V1 e V2.
Nas cartasU3 e V3, o ´unico ponto singular do sistema (1.7) ´e a origem
e seu comportamento ´e de foco inst´avel, como no plano.
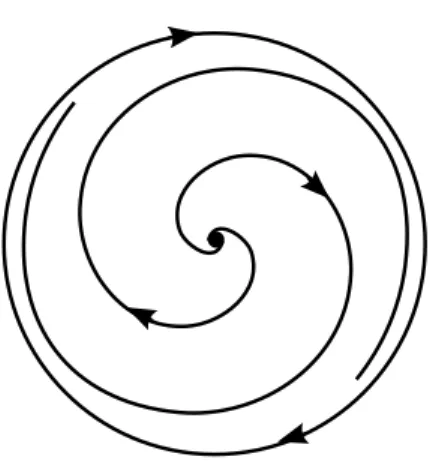
O retrato de fase do sistema (1.7) no disco de Poincar´e pode ser obser-vado na Figura 1.9.
Figura 1.9: Retrato de fase do sistema (1.7) no disco de Poincar´e.
Exemplo 4 Considere o sistema diferencial linear
˙
x=y,
˙
y=−x. (1.8)
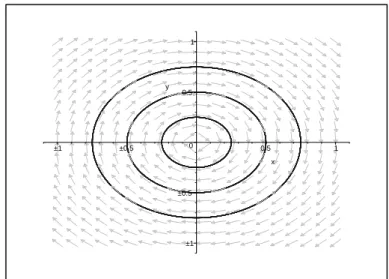
Note que seu ´unico ponto singular ´e a origem e que trata-se de um centro linear, conforme pode ser observado na Figura 1.10.
A express˜ao de p(X) na carta U1 ´e
˙
u=−u2−1,
˙
v =−uv,
e na carta U2 ´e dada por
˙
u=u2+ 1,
˙
v =uv.
Podemos notar que p(X) n˜ao possui pontos singulares nas cartasU1 eU2. O
–1 –0.5 0 0.5 1
y
–1 –0.5 0.5 1
x
Figura 1.10: Retrato de fase do sistema (1.8): A origem ´e um centro.
Nas cartas U3 eV3, o ´unico ponto singular do distema (1.8)´e a origem
e seu comportamento ´e do tipo centro, como no plano.
O retrato de fase do sistema (1.8) no disco de Poincar´e pode ser obser-vado na Figura 1.11.
Figura 1.11: Retrato de fase do sistema (1.8) no disco de Poincar´e.
Exemplo 5 Vamos estudar o retrato de fase no disco de Poincar´e do sistema n˜ao-linear
˙
x=−x−y2,
˙
Os pontos (0,0) e (−1,−1)s˜ao pontos singulares do sistema (1.9). O ponto
(0,0)´e um ponto de sela e o ponto (−1,−1) ´e um centro. As ´unicas separa-trizes do sistema (1.9) s˜ao as do ponto de sela. O retrato de fase do sistema
(1.9) no plano ´e dado pela Figura 1.12.
–2 –1 0 1 2
y
–2 –1 1 2
x
Figura 1.12: Retrato de fase do sistema (1.9) no plano.
Temos que a express˜ao de p(X) na carta U1 ´e dada por
˙
u= 1 + 2uv+u3,
˙
v =v2+u2v.
Nesta carta, o ponto(−1,0)´e um ponto singular e trata-se de um n´o repulsor. Como o grau do sistema (1.9) ´e par, concluimos que na carta V1, o ponto
diametralmente oposto ao ponto (−1,0)∈U1 tamb´em ´e um ponto singular e
trata-se de um n´o atrator.
A express˜ao de p(X) na carta U2 ´e dada por
˙
u=−1−2uv−u3,
˙
v =−v2−u2v.
Nesta carta n˜ao h´a pontos singulares. O mesmo ´e verdade para a carta V2.
Figura 1.13: Retrato de fase do sistema (1.9) no disco de Poincar´e.
1.4
Compactifica¸
c˜
ao em coordenadas polares
Na Se¸c˜ao 1.1, vimos que a compactifica¸c˜ao de Poincar´e consiste, basi-camente, na introdu¸c˜ao das coordenadas (u, v) a partir das f´ormulas
(x1, x2) =
(1
v, u v
)
, (x1, x2) =
(u
v,
1
v
)
, (x1, x2) = (u, v),
e da multiplica¸c˜ao do campo vetorial obtido com cada mudan¸ca de vari´avel pelo fator vd−1.
Este modo mais abstrato de construir um campo vetorial em uma esfera diretamente por meio de cartas ´e o meio mais pr´atico para c´alculos precisos. Por´em, tamb´em podemos compactificar um campo vetorial polinomial a par-tir do uso de coordenadas polares, como mostraremos nesta se¸c˜ao.
Em geral, esta constru¸c˜ao ´e prefer´ıvel em casos onde p(X) n˜ao tem pontos singulares no infinito, implicando que o conjunto de pontos no in-finito se torna uma ´orbita fechada. Para estudar o comportamento de p(X) pr´oximo dela, ´e necess´ario um estudo global de sua vizinhan¸ca. Por´em, essa vizinhan¸ca n˜ao est´a inteiramente contida nas cartas (U1, φ1) ou (U2, φ2).
Inicialmente, consideremos a mudan¸ca de vari´aveis
x1 =
1
ρcosθ, x2 =
1
ρ senθ, (1.10)
(0,0)
r
2p q
x y
(0,0)
Figura 1.14: Mudan¸ca de vari´aveis introduzida pelo sistema (1.10).
A ideia geom´etrica desta mudan¸ca de vari´aveis pode ser vista na Figura 1.14.
Observa¸c˜ao 1 Note que se ρ→0, ent˜ao x→ ∞ e y→ ∞.
Derivando cada equa¸c˜ao do sistema (1.10) em rela¸c˜ao a t, obtemos
˙
x1 = −
senθ·θρ˙ −cosθ·ρ˙
ρ2 ⇔ θρ˙ =
−x˙1ρ2−cosθ·ρ˙
senθ
e
˙
x2 =
cosθ·θρ˙ − senθ·ρ˙
ρ2 ⇔ θρ˙ =
˙
x2ρ2+ senθ·ρ˙
cosθ .
Unindo os dois resultados obtidos
−x˙1ρ2−cosθ·ρ˙
senθ =
˙
x2ρ2+ senθ·ρ˙
cosθ ⇔ ρ˙=−ρ
2( ˙x
1cosθ+ ˙x2 senθ).
(1.11) Com isso, descobrimos a equa¸c˜ao para ˙ρ. Agora vamos descobrir a equa¸c˜ao para ˙θ. Para tal, vamos trabalhar novamente com cada equa¸c˜ao do sistema (1.10) derivada em rela¸c˜ao a t. Assim,
˙
x1 = −
senθ·θρ˙ −cosθ·ρ˙
ρ2 ⇔ ρ˙ =
−x˙1ρ2− senθ·θρ˙
cosθ
e
˙
x2 =
cosθ·θρ˙ − senθ·ρ˙
ρ2 ⇔ ρ˙=
−x˙2ρ2+ cosθ·θρ˙
Unindo os dois resultados obtidos
−x˙1ρ2− senθ·θρ˙
cosθ =
−x˙2ρ2+ cosθ·θρ˙
senθ ⇔ θ˙=ρ( ˙x2cosθ−x˙1 senθ).
(1.12) Assim, a partir de (1.11) e (1.12), podemos escrever o seguinte sistema
˙
ρ=−ρ2( ˙x
1cosθ+ ˙x2 senθ),
˙
θ =ρ( ˙x2cosθ−x˙1 senθ).
(1.13)
Exemplo 6 Considere novamente o sistema diferencial linear do Exemplo 4, ou seja,
˙
x=y,
˙
y=−x,
e vamos fazer a compactifica¸c˜ao em coordenadas polares deste sistema. Con-siderando a mudan¸ca de vari´aveis (1.10) e usando a equa¸c˜ao (1.13), obtemos o seguinte sistema
˙
ρ= 0,
˙
θ=−1. (1.14)
Note que o sistema (1.14)n˜ao possui pontos singulares, poisθ˙=−1e, assim, n˜ao h´a pontos tais que ρ˙ = 0 e θ˙ = 0. Al´em disso, como ρ˙ = 0 e θ˙ = −1, temos que as solu¸c˜oes possuem uma distˆancia radial constante, ou seja, s˜ao circunferˆencias centradas na origem, e giram no sentido hor´ario. Isto pode ser observado na Figura 1.11.
1.5
O programa P4
O programa P4 foi desenvolvido em parceria por pesquisadores da Es-panha e da B´elgica e pode ser baixado gratuitamente no endere¸co http:// mat.uab.es/∼artes/p4/p4.htm. Ele trabalha em conjunto com o programa
MAPLE ou REDUCE que n˜ao vem incluso com o P4 e que deve ser uma aquisi¸c˜ao a parte do usu´ario.
A Figura 1.15 mostra o painel de controle principal do programa P4. Essa janela ´e aberta assim que se inicia o programa e sua principal fun¸c˜ao ´e disponibilizar o local para o usu´ario introduzir o sistema a ser estudado e alterar alguns de seus parˆametros de funcionamento.
Todos os resultados obtidos analiticamente no Cap´ıtulo 4 deste trabalho foram testados numericamente, utilizando-se o programa P4.
Um tutorial deste programa pode ser encontrado no Cap´ıtulo 9 de [16].
2
Desingulariza¸
c˜
ao de pontos singulares
n˜
ao-elementares
Seja X um campo vetorial polinomial de classe C∞ em R2 associado
ao sistema de equa¸c˜oes diferenciais ordin´arias
˙
x=P(x, y),
˙
y=Q(x, y). (2.1)
Consideremos, por exemplo, o caso em que P(x, y) = x2 − 2xy e
Q(x, y) = y2−2xy. Note que a origem, ou seja, o ponto (0,0), ´e um ponto
singular isolado deste sistema. Ao calcular a matriz Jacobiana deste sistema aplicada no ponto (0,0), obtemos a matriz nula. Ent˜ao, dizemos que este ponto ´e um ponto singular n˜ao-elementar, pois ele n˜ao ´e um ponto singular hiperb´olico nem semi-hiperb´olico. Neste caso, n˜ao ´e poss´ıvel utilizar, por exemplo, o Teorema de Hartman-Grobmann (este resultado pode ser encon-trado no Cap´ıtulo 6 de [14] e no Cap´ıtulo 1 de [16]), j´a que este ´e v´alido apenas para pontos singulares hiperb´olicos. Assim, temos que recorrer a ou-tros m´etodos para estudar o comportamento do campo pr´oximo a este ponto singular.
Uma t´ecnica poderosa no estudo deste tipo de pontos singulares chama-seblow-up e consiste em mudan¸cas de vari´aveis que “explodem” (ou “expan-dem”) o ponto singular em uma curva. Em seguida, basta estudarmos o comportamento dos pontos singulares obtidos sobre a curva no novo campo. Caso algum destes pontos singulares ainda seja n˜ao-elementar aplicamos no-vamente a t´ecnica e assim sucessino-vamente e de maneira finita at´e obtermos apenas pontos singulares elementares. A este processo chamamos de blowing-up sucessivo. Para finalizar, aplicamos o processo inverso, conhecido como
blowing down, e obtemos o retrato de fase do campo na vizinhan¸ca do ponto singular n˜ao-elementar.
Neste cap´ıtulo, estudaremos um tipo deblow-up homogˆeneo conhecido como blow-up polar. Para maiores informa¸c˜oes sobre este e outros tipos de
blow-ups consulte [15] ou o Cap´ıtulo 3 de [16].
2.1
Blow-up polar
Seja X um campo vetorial, conforme definimos anteriormente, associ-ado ao sistema (2.1). Vamos supor que a origem ´e um ponto singular isolassoci-ado do campo X. Consideremos a aplica¸c˜ao
φ:S1×R→R2
(θ, ρ)7−→(ρcosθ, ρ senθ)
Podemos definir um campo vetorial ˆX de classe C∞ sobre o cilindro
S1 ×R tal que φ∗( ˆX) = X, no sentido que Dφv( ˆX(v)) = X(φ(v)). Este
campo ´e chamado de pull back deX por φ e nada mais ´e do que X escrito em coordenadas polares. A aplica¸c˜ao φ´e um difeomorfismo e, portanto, uma autˆentica mudan¸ca de coordenadas em S1×(0,∞), exceto em {ρ = 0}, j´a
queφleva{ρ= 0}no ponto (0,0), de maneira que sua inversaφ−1 “explode”
a origem em um c´ırculo.
Para estudar o retrato de fase de X em uma vizinhan¸ca V da origem, basta estudar o retrato de fase de ˆX na vizinhan¸ca de φ−1(V) do c´ırculo S1× {0}.
x y
(0,0)
r
q r
0
-1
r
Para escrever o campoX em coordenadas polares, consideramos a mu-dan¸ca de vari´aveis
x=ρcosθ, y =ρ senθ. (2.2)
Derivando cada equa¸c˜ao do sistema (2.2) com rela¸c˜ao a t, obtemos ˙
x= ˙ρcosθ− senθ·θρ˙ ⇔ θρ˙ = −x˙ + ˙ρcosθ senθ
e
˙
y = ˙ρ senθ+ cosθ·θρ˙ ⇔ θρ˙ = y˙−ρ˙ senθ
cosθ .
Unindo os resultados obtidos, ficamos com
−x˙ + ˙ρcosθ
senθ =
˙
y−ρ˙ senθ
cosθ ⇔ ρ˙ = ˙xcosθ+ ˙y senθ. (2.3)
Agora, vamos descobrir uma equa¸c˜ao para ˙θ. Para isso, vamos proceder analogamente ao que foi feito para ˙ρ, derivando em rela¸c˜ao a t as equa¸c˜oes do sistema (2.2). Assim,
˙
x= ˙ρcosθ− senθ·θρ˙ ⇔ ρ˙ = x˙ + senθ·θρ˙ cosθ
e
˙
y = ˙ρ senθ+ cosθ·θρ˙ ⇔ ρ˙ = y˙−cosθ·θρ˙
senθ .
Unindo os resultados obtidos, temos
˙
x+ senθ·θρ˙
cosθ =
˙
y−cosθ·θρ˙
senθ ⇔ θ˙=
˙
ycosθ−x˙ senθ
ρ . (2.4)
De (2.3) e (2.4), obtemos o seguinte sistema
˙
ρ=P cosθ+Q senθ,
˙
θ = Qcosθ−P senθ
ρ ,
(2.5)
onde ˙x=P =P(ρcosθ, ρ senθ) e ˙y=Q=Q(ρcosθ, ρ senθ). Chamamos o campo obtido de ˆX.
Para n˜ao zerarmos o sistema (2.5) ao tomarmos ρ = 0, escolhemos k
o maior inteiro positivo tal que ρk|P e ρk|Q e definimos um novo campo
vetorial ˜X, com
˜
X = Xˆ
Observe que esta divis˜ao n˜ao muda as ´orbitas de ˆX, muda apenas a parametriza¸c˜ao det. Com isso, observe que o ponto singular (0,0) foi levado para a curva S1× {0}. Al´em disso, ao longo deS1× {0} os pontos singulares
s˜ao determinados pelas solu¸c˜oes de ˙θ = 0 no sistema associado ao campo ˜X. Vamos ilustrar o uso desta t´ecnica com alguns exemplos.
Exemplo 7 Consideremos o campo vetorialXassociado ao sistema de equa-¸c˜oes diferenciais ordin´arias
˙
x=x2−2xy,
˙
y=y2−2xy. (2.6)
Em coordenadas polares, o sistema (2.6) ´e dado por
˙
ρ=ρ2(cos3θ+ sen3θ−2 cos2θsenθ−2 cosθsen2θ),
˙
θ = 3ρcosθsenθ( senθ−cosθ). (2.7)
Note que se tom´assemos ρ = 0 zerar´ıamos o sistema (2.7). Para re-solver isso, escolhemosk= 2, poisρ2|P eρ2|Q, ondeP =P(ρcosθ, ρ senθ) =
ρ2(cos2θ−2 cosθsenθ) e Q=Q(ρcosθ, ρ senθ) = ρ2( sen2θ−2 cosθsenθ).
Assim, obtemos o campo vetorial X˜ associado ao sistema
˙
ρ=ρ(cos3θ+ sen3θ−2 cos2θsenθ−2 cosθsen2θ),
˙
θ = 3 cosθsenθ( senθ−cosθ). (2.8)
Em ρ = 0, temos que θ = 0, π/4, π/2, π,5π/4,3π/2 s˜ao solu¸c˜oes do sistema (2.8).
Agora, estudando o campo X˜ localmente em cada um destes pontos singulares, obtemos que todos eles s˜ao pontos de sela. Com isso, podemos determinar o comportamento pr´oximo a origem do campo vetorial X. Esse processo ´e ilustrado pela Figura 2.2.
Exemplo 8 SejaX o campo vetorial associado ao sistema de equa¸c˜oes dife-renciais ordin´arias
˙
x=xy,
˙
y =−2x2+xy+1
2y
Blow-up Blowing-down
Figura 2.2: Blow-up polar na origem do sistema (2.6).
Em coordenadas polares, o sistema (2.9) ´e dado por
˙
ρ=ρ2
(
1 2 sen
3θ−cos2θsenθ+ cosθsen2θ
)
,
˙
θ=ρ
(
−2 cos3θ− 1
2cosθsen
2θ+ cos2θsenθ
)
.
Neste caso, escolhemos k = 2. Assim, obtemos o campo vetorial X¯
associado ao sistema:
˙
ρ=ρ
(
1 2 sen
3θ−cos2θsenθ+ cosθsen2θ
)
,
˙
θ =−2 cos3θ−1
2cosθsen
2θ+ cos2θsenθ.
(2.10)
Em ρ= 0, temos que θ =π/2,3π/2 s˜ao solu¸c˜oes do sistema (2.10). Estudando o campo X˜ na vizinhan¸ca de cada um destes pontos singu-lares, obtemos que eles apresentam comportamento do tipo n´o repulsor (para
θ = π/2) e n´o atrator (para θ = 3π/2). Com isso, podemos determinar o comportamento pr´oximo a origem do campo vetorial X. Esse processo ´e ilustrado pela Figura 2.3.
Blow-up Blowing-down
3
Integrabilidade de Darboux
Ao estudarmos o retrato de fase de um campo vetorial, especialmente de dimens˜ao dois, a existˆencia de uma integral primeira simplifica muito este estudo, pois com ela ´e poss´ıvel determinar a dinˆamica global do campo. Por´em, n˜ao ´e f´acil saber se um campo vetorial possui ou n˜ao integral primeira. Neste cap´ıtulo, vamos estudar a existˆencia de integrais primeiras para campos vetoriais polinomiais no plano a partir da teoria de integrabilidade de Darboux, conforme ´e feito no Cap´ıtulo 2 de [9], no Cap´ıtulo 8 de [16] e no Cap´ıtulo 5 (sobre sistemas Hamiltonianos) de [26]. Este tipo de integra-bilidade ´e particularmente interessante, pois nos fornece uma liga¸c˜ao entre a integrabilidade do campo e o n´umero de curvas alg´ebricas invariantes que ele possui.
Consideremos o sistema diferencial polinomial complexo no plano (ou simplesmente sistema polinomial) dado por
˙
x=P(x, y),
˙
y=Q(x, y). (3.1)
onde x, y ∈ R s˜ao as vari´aveis dependentes, a vari´avel independente t (o
tempo) ´e um complexo e P e Q s˜ao polinˆomios nas vari´aveis x e y com coeficientes complexos. Suponhamos que o sistema (3.1) tenha grau d e que os polinˆomios P e Q sejam relativamente primos no anel dos polinˆomios complexos nas vari´aveis x e y. O campo vetorial X associado ao sistema (3.1) ´e definido por X(x, y) = (P(x, y), Q(x, y)).
Al´em disso, denotaremos por F o corpo dos reais R ou complexos C,
por sistemaF-polinomial o sistema polinomial (3.1) nas vari´aveisx,y e com
os coeficientes dos polinˆomiosP eQem Fe porF[x, y] o anel dos polinˆomios
nas vari´aveis x e y e coeficientes em F.
3.1
Integrais primeiras e invariantes
Consideremos o campo vetorial X associado ao sistema F-polinomial
(3.1). Dizemos que X ´e integr´avel em um subconjunto aberto U de F2 se
existe uma fun¸c˜ao anal´ıtica n˜ao-constante H : U →F, chamada de integral
primeira de X em U, tal que H(x(t), y(t)) = c, c constante, para todo t
e para toda solu¸c˜ao ϕ(t) = (x(t), y(t)) de X contida em U, ou seja, H ´e constante em todas as solu¸c˜oes de X contidas em U.
Note que H ´e uma integral primeira de X em U se, e somente se,
X(H) = ⟨X,∇H⟩=P∂H ∂x +Q
∂H ∂y ≡0
em U, onde ∇H ´e o vetor gradiente de H.
Seja U ⊂ F2 um conjunto aberto. Dizemos que uma fun¸c˜ao anal´ıtica
I(x, y, t) :U ×F → F ´e um invariante do campo vetorial polinomial X em
U se I(x, y, t) = c, c constante, para todos os valores de t para os quais as solu¸c˜oes ϕ(t) = (x(t), y(t)) de X est˜ao definidas e contidas em U, ou seja,
dI dt =P
∂I ∂x +Q
∂I ∂y +
∂I ∂t ≡0.
Se um invariante I ´e independente de t, ent˜ao I ´e uma integral primeira. Seja ϕp(t) = (x(t), y(t)) a solu¸c˜ao de X passando pelo ponto p ∈ F2,
definida em seu intervalo maximal (αp, ωp) tal que ϕp(0) = p. Se ωp = ∞,
definimos o conjunto
ω(p) = {q∈F2 : existe {tn} com tn → ∞e ϕ(tn)→q quando n → ∞}.
Da mesma maneira, seαp =−∞, definimos o conjunto
α(p) = {q∈F2 : existe {tn} com tn → −∞e ϕ(tn)→q quando n→ ∞}.
Os conjuntosω(p) eα(p) s˜ao chamadosconjunto ω–limite (ou simples-mente ω–limite) e conjunto α–limite (ou α–limite) de p, respectivamente.
Proposi¸c˜ao 1 Seja U ⊂ F2 um aberto e X o campo vetorial associado ao
sistema F-polinomial (3.1). Se H : U → F ´e uma integral primeira de X
e F : F → F ´e uma fun¸c˜ao anal´ıtica, ent˜ao F ◦H ´e tamb´em uma integral
primeira de X.
Prova. De fato, supondo F =F(x), temos que
X(F ◦H) =⟨X,∇(F ◦H)⟩=P ∂
∂x(F ◦H) +Q ∂
∂y(F ◦H)
=P ( dF dx ∂H ∂x ) +Q ( dF dx ∂H ∂y ) = ( P∂H ∂x ) dF dx + ( Q∂H ∂y ) dF dx ≡0.
Segue an´alogo para F =F(y).
Dizemos que o campo vetorial X ´e Hamiltoniano em U ⊂ F2 com um
grau da liberdade se existe uma fun¸c˜ao anal´ıtica H:U →F tal que
P = ∂H
∂y e Q=− ∂H
∂x.
Temos que H ´e dita Hamiltoniano de X. Note que, seH ´e Hamiltoniano de
X, ent˜ao H ´e integral primeira deX. De fato,
X(H) =P∂H ∂x +Q
∂H ∂y = ∂H ∂y ∂H ∂x + ( −∂H ∂x ) ∂H ∂y ≡0.
Os campos vetoriais mais simples que possuem integral primeira s˜ao os Hamiltonianos. Em geral, a integral primeira de um campo vetorial n˜ao-Hamiltoniano ´e muito dif´ıcil de se detectar. Abaixo trazemos um resultado para campos vetoriais Hamiltonianos definidos em um subconjunto U ⊂R2.
Proposi¸c˜ao 2 Qualquer ponto singular n˜ao-degenerado de um campo veto-rial Hamiltoniano definido em U ⊂R2 ´e uma sela ou um centro.
Prova. Seja X um campo vetorial definido em um subconjunto U ⊂ R2
na origem. Temos que a matriz Jacobiana de X no ponto O = (0,0) ´e igual a
DX(O) =
∂P ∂x(0,0)
∂P ∂y(0,0) ∂Q
∂x(0,0) ∂Q
∂y(0,0)
=
∂2H
∂x∂y(0,0)
∂2H
∂y2 (0,0)
−∂
2H
∂x2(0,0) −
∂2H
∂y∂x(0,0)
.
Note que tr(DX(O)) = 0, onde tr(DX(O)) ´e o tra¸co da matrizDX(O), e
det(DX(O)) = ∂
2H
∂x2 (0,0)
∂2H
∂y2 (0,0)−
(
∂2H
∂x∂y(0,0)
)2
´e o determinante da matrizDX(O).
Temos que det(DX(O))̸= 0, pois, por hip´otese, a origem ´e um ponto singular n˜ao-degenerado. Se det(DX(O)) < 0, ent˜ao a origem ´e um ponto de sela. Agora, se det(DX(O)) > 0, ent˜ao a origem ´e um centro ou um foco fraco. Como H ´e o Hamiltoniano do campo vetorial X, ent˜ao H ´e uma integral primeira de X e, deste modo, H ´e constante em todas as solu¸c˜oes deX. Se a origem for um foco, ent˜ao a origem n˜ao ´e um m´aximo ou m´ınimo local estrito da fun¸c˜aoH. Suponha que a origem seja um foco est´avel. Ent˜ao,
H(x0, y0) = lim
t→∞H(x(x0, y0, t), y(x0, y0, t)) = H(0,0),
para todo (x0, y0) ∈ Vϵ(0,0), onde Vϵ(0,0) ´e um vizinhan¸ca suficientemente
pequena da origem. Como H ´e, por defini¸c˜ao, anal´ıtica e n˜ao-constante, ent˜ao H(x, y)> H(0,0) (a origem ´e um m´ınimo local) ou H(x, y)< H(0,0) (a origem ´e um m´aximo local), para todo (x, y) ∈ Vϵ(0,0), o que ´e uma
contradi¸c˜ao. Um argumento similar pode ser usado quando a origem ´e um foco inst´avel.
Portanto, um ponto singular n˜ao-degenerado de um campo vetorial
Hamiltoniano ´e uma sela ou um centro.
Proposi¸c˜ao 3 Seja X o campo vetorial associado ao sistema (3.1). Ent˜ao
X ´e Hamiltoniano se, e somente se, div(X)≡0, onde div(X)´e o divergente do campo vetorial X e ´e dado por div(X) = ∂P
∂x + ∂Q
Prova. (⇒) Se X ´e um campo vetorial Hamiltoniano, ent˜ao existe uma fun¸c˜ao H tal que P = ∂H
∂y e Q=− ∂H
∂x. Logo, ∂P
∂x = ∂2H
∂x∂y e ∂Q
∂y =− ∂2H
∂y∂x.
ComoH´e anal´ıtica, pelo Teorema de Schwarz segue que ∂
2H
∂x∂y = ∂2H
∂y∂x.
Logo,
div(X) = ∂P
∂x + ∂Q
∂y = ∂2H
∂x∂y − ∂2H
∂y∂x ≡0.
(⇐) Se div(X)≡0, definamos
H(x, y) =
∫
P(x, y)dy−h(x),
ondeh(x) ´e escolhida de tal modo que ∂H
∂x =−Q. DerivandoH com rela¸c˜ao
a x obtemos
∂H ∂x =
∫ ∂P
∂xdy−h
′
(x) = −Q ⇒ h′
(x) =
∫ ∂P
∂xdy+Q
⇒ h(x) =
∫ ∫
∂P
∂xdydx+
∫
Qdx.
Como P ´e anal´ıtica, pelo Teorema de Fubini temos que
∫ ∫
∂P
∂xdydx=
∫ ∫
∂P ∂xdxdy.
Logo,
h(x) =
∫ ∫
∂P
∂xdxdy+
∫
Qdx.
Assim,
H(x, y) =
∫
P dy−
∫ ∫
∂P
∂xdxdy−
∫
Qdx ⇒
⇒ ∂H
∂y =P −
∫ ∂P
∂xdx−
∫ ∂Q
∂ydx=P −
∫ ( ∂P ∂x + ∂Q ∂y )
dx=P.
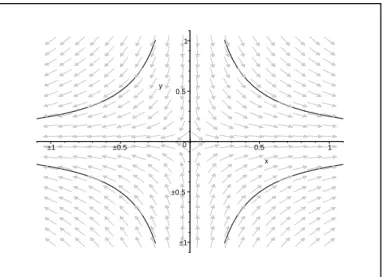
Exemplo 9 Seja X o campo vetorial associado ao sistema diferencial linear
˙
x=ax,
˙
y=−by, (3.2)
com a >0 e b >0 constantes reais.
Considere a fun¸c˜ao H1 :R2 →R dada por
H1(x, y) = xαy
onde α =b/a. Temos que H1 ´e uma integral primeira do campo vetorial X
em R2. De fato,
X(H1) =ax
∂H1
∂x −by ∂H1
∂y =ax(αx
α−1y)
−by(xα) = bxαy−bxαy= 0,
para todo (x, y)∈R2.
Assim, H1 ´e constante em todas as solu¸c˜oes de X em R2. Note que a
origem ´e o ´unico ponto singular do sistema (3.2). Al´em disso, a origem ´e ponto de sela da fun¸c˜ao H1 e, consequentemente, do campo vetorial X. O
gr´afico da fun¸c˜ao H1 e o retrato de fase do campo vetorialX podem ser vistos
na Figura 3.1.
–1 –0.5 0 0.5 1
y
–1 –0.5 0.5 1
x
Figura 3.1: Gr´afico da fun¸c˜aoH1 e retrato de fase do campo vetorialX, com
Agora, seja Y o campo vetorial associado ao sistema diferencial linear
˙
x=ay,
˙
y=−bx, (3.3)
com a >0 e b >0 constantes reais.
Considere a fun¸c˜ao H2 :R2 →R dada por
H2(x, y) = αx2+y2
onde α = b/a. Temos que H2 ´e uma integral primeira do campo vetorial Y
em R2. De fato,
Y(H2) = ay
∂H2
∂x −bx ∂H2
∂y =ay(2αx)−bx(2y) = 2bxy−2bxy = 0,
para todo (x, y)∈R2.
Logo, H2 ´e constante em todas as solu¸c˜oes de Y em R2. Note que a
origem ´e o ´unico ponto singular do sistema (3.3). Al´em disso, a origem ´e ponto de m´ınimo local da fun¸c˜ao H2 e, consequentemente, um centro do
campo vetorial Y, pois as curvas de n´ıveis de H2 s˜ao ´orbitas fechadas. O
gr´afico da fun¸c˜ao H2 e o retrato de fase do campo vetorial Y podem ser
vistos na Figura 3.2.
–1 –0.5 0 0.5 1
y
–1 –0.5 0.5 1
x
Figura 3.2: Gr´afico da fun¸c˜aoH2 e retrato de fase do campo vetorialY, com
Exemplo 10 Seja X o campo vetorial associado ao sistema
˙
x=−2y,
˙
y= 3x2−2x. (3.4)
Temos que a fun¸c˜ao H :R2 →R dada por
H(x, y) = −x3+x2−y2
´e uma integral primeira do campo vetorial X em R2, pois
X(H) = −2y∂H ∂x + (3x
2
−2x)∂H
∂y =−2y(−3x
2+ 2x) + (3x2
−2x)(−2y) = 0,
para todo (x, y)∈R2.
Deste modo, H ´e constante em todas as solu¸c˜oes de X em R2. Al´em
disso, note que H ´e um Hamiltoniano do campo vetorial X. De fato,
∂H
∂y =−2y e − ∂H
∂x = 3x
2
−2x.
O sistema (3.4) possui dois pontos singulares (0,0) e (2/3,0). Temos que a origem ´e um ponto de sela e podemos concluir, a partir da Proposi¸c˜ao 2, que o ponto singular (2/3,0)´e um centro.
O gr´afico da fun¸c˜ao H e o retrato de fase do campo vetorial X podem ser vistos na Figura 3.3.
–2 –1 0 1 2 y
–2 –1 1 2
x
3.2
Fatores integrantes
SejaX o campo vetorial associado ao sistema F-polinomial (3.1), U ⊂ F2 um aberto e R :U →Fuma fun¸c˜ao anal´ıtica n˜ao identicamente nula em
U. A fun¸c˜ao R ´e umfator integrante do campoX em U se, e somente se,
X(R) = −Rdiv(X),
onde div(X) ´e o divergente do campo vetorial X, ou, equivalentemente,
P∂R ∂x +Q
∂R
∂y =−R
(
∂P ∂x +
∂Q ∂y
)
.
A integral primeira H associada ao fator integrante R ´e dada por
H(x, y) =
∫
R(x, y)P(x, y)dy+h(x),
onde h(x) ´e escolhido de modo que ∂H
∂x =−RQ. Note que, X(H) =P∂H
∂x +Q ∂H
∂y =P(−RQ) +Q(RP) = R(−P Q+QP)≡0
e
RP = ∂H
∂y e RQ=− ∂H
∂x. (3.5)
Reciprocamente, dada uma integral primeiraHdo sistema (3.1) sempre podemos encontrar um fator integrante R que satisfa¸ca (3.5).
Exemplo 11 A fun¸c˜ao R : R2 → R dada por R(x, y) = 2e2by ´e um fator
integrante do sistema
˙
x=−y−b(x2+y2),
˙
y=x.
De fato,
P∂R ∂x +Q
∂R
∂y = (−y−b(x
2+y2))0 +x(4be2by) = 4bxe2by.
−R ( ∂P ∂x + ∂Q ∂y )
=−2e2by(−2bx+ 0) = 4bxe2by.
Logo,
P∂R ∂x +Q
∂R
∂y =−R
( ∂P ∂x + ∂Q ∂y ) .
Proposi¸c˜ao 4 Se o sistema F-polinomial (3.1) tem dois fatores integrantes
R1 e R2 em um subconjunto aberto U de F2 e R1/R2 ´e n˜ao-constante, ent˜ao
a fun¸c˜ao H = R1/R2 ´e uma integral primeira do campo X associado ao
sistema (3.1) no conjuntos aberto U \ {R2 = 0}.
Prova. Como R1 eR2 s˜ao fatores integrantes, ent˜aoX(Ri) =−Ridiv(X),
i= 1,2, por defini¸c˜ao. Ent˜ao,
X(H) = X
(
R1
R2
)
= (X(R1))R2 −R1(X(R2)) (R2)2
= div(X)(−R1R2+R1R2)
(R2)2 ≡
0.
Portanto, H ´e uma integral primeira de X.
De forma an´aloga a fator integrante, dizemos que uma fun¸c˜ao anal´ıtica
V : U → R, a qual n˜ao ´e identicamente nula em U, ´e um fator integrante
inverso do sistema (4.1) em U se, e somente se, X(V) = V div(X), ou, equivalentemente,
P∂V ∂x +Q
∂V ∂y = ( ∂P ∂x + ∂Q ∂y ) V.
3.3
Curvas Alg´
ebricas Invariantes
Seja f ∈ C[x, y], f n˜ao constante. A curva alg´ebrica f(x, y) = 0 ´e
uma curva alg´ebrica invariante (ou, em alguns casos, simplesmente curva invariante) do sistema F-polinomial (3.1) se existe K ∈C[x, y] tal que
X(f) =P∂f ∂x +Q
∂f
∂y =Kf.
Observa¸c˜ao 3 Se o sistema F-polinomial (3.1) tem grau m, ent˜ao o grau
de qualquer cofator K ´e no m´aximo m−1.
Note que, pela defini¸c˜ao, o campo vetorial X = (P, Q) ´e tangente `a curva alg´ebrica invariante f = 0 e, portanto, f = 0 ´e formada por ´orbitas de
X. Ent˜ao, f = 0 ´e invariante pelo fluxo definido porX.
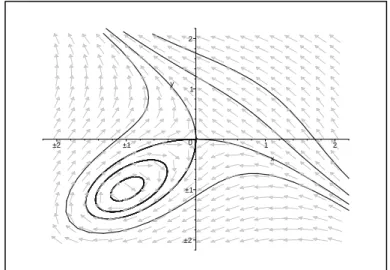
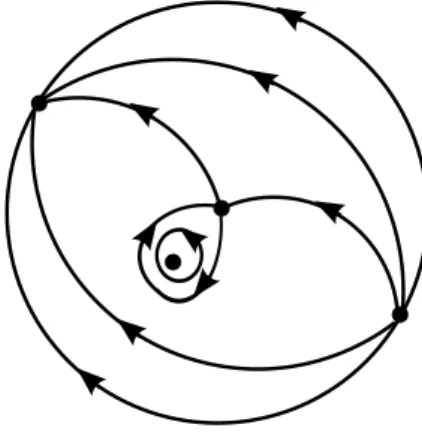
Exemplo 12 Seja X o campo vetorial associado ao sistema diferencial poli-nomial quadr´atico
˙
x=−y(1 +a2−r2) + 2axy,
˙
y=x(1 +a2−r2) +a(−x2+y2−1), (3.6)
com a >0 e r >0.
Temos que as curvasf1, f2 :R2 →Rdadas porf1(x, y) =x2+y2−1 = 0
e f2(x, y) = (x−a)2+y2 −r2 = 0, ou seja, f1 ´e a circunferˆencia centrada
na origem com raio 1 e f2 ´e a circunferˆencia centrada no ponto (a,0) com
raior, s˜ao curvas alg´ebricas invariantes do sistema (3.6)com cofatoresK1 =
K2 = 2ya. De fato,
X(f1) = 2x(−y(1 +a2−r2) + 2axy) + 2y(x(1 +a2−r2)
+a(−x2+y2−1)) = 2ya(x2+y2−1) =K1f1
e
X(f2) = 2(x−a)(−y(1 +a2−r2) + 2axy) + 2y(x(1 +a2 −r2)
+a(−x2+y2−1)) = 2ya((x−a)2+y2−r2) = K2f2.
No Cap´ıtulo 4, analisaremos com mais detalhes a classe de sistemas apresentada no Exemplo 12.
Observa¸c˜ao 4 Na defini¸c˜ao da curva alg´ebrica invariante f = 0, sempre permitimos que esta curva seja complexa, ou seja, f ∈ C[x, y], mesmo no
Na proposi¸c˜ao seguinte e no decorrer do cap´ıtulo, a conjuga¸c˜ao ¯f sig-nifica conjuga¸c˜ao apenas dos coeficientes do polinˆomio f.
Proposi¸c˜ao 5 Para um sistema polinomial real (3.1), f = 0 ´e uma curva alg´ebrica invariante de (3.1) com cofator K se, e somente se, f¯= 0 for uma curva alg´ebrica invariante de (3.1) com cofator K¯.
Prova. Seja f = 0 uma curva alg´ebrica invariante do sistema polinomial real (3.1) com cofator K. Ent˜ao, segue que
X(f) =P∂f ∂x +Q
∂f
∂y =Kf.
Logo,
P∂f ∂x +Q
∂f
∂y =Kf ⇔ P ∂f¯ ∂x +Q
∂f¯
∂y = ¯Kf¯ ⇔ X( ¯f) = ¯Kf ,¯
pois P, Q ∈ R[x, y]. Portanto, ¯f = 0 ´e uma curva alg´ebrica invariante de
(3.1) com cofator ¯K.
A rec´ıproca segue de modo an´alogo.
Lema 1 Sejam f, g ∈ C[x, y]. Assuma que f e g s˜ao relativamente primos
no anel C[x, y]. Ent˜ao, f g = 0´e uma curva alg´ebrica invariante do sistema
polinomial (3.1) com cofatorKf g se, e somente se,f = 0 e g = 0 s˜ao curvas alg´ebricas invariantes com cofatores Kf e Kg, respectivamente. Al´em disso,
Kf g =Kf +Kg.
Prova. (⇒) Note queX(f g) = (X(f))g+f(X(g)). Sef g = 0 ´e uma curva alg´ebrica invariante com cofator Kf g, ent˜ao
X(f g) = Kf gf g ⇒ (X(f))g+f(X(g)) = Kf gf g ⇒ f|X(f) e g|X(g),
pois f e g s˜ao relativamente primos. Logo, existem polinˆomios Kf e Kg
tais que X(f) = Kff e X(g) = Kgg. Portanto, f e g s˜ao curvas alg´ebricas