Mestrado em Informática
Localização de Dispositivos Móveis em
Redes Wi-Fi
Departamento de Engenharias
Universidade de Trás-os-Montes e Alto Douro
Vila Real, 2007
Dissertação submetida por Joel Filipe Machado Carvalho à Universidade de Trás-os-Montes e Alto Douro para obtenção do grau de Mestre em Informática, sob a orientação do Professor Doutor Paulo Nogueira Martins, Professor Auxiliar do Departamento de Engenharias da Universidade de Trás-os-Montes e Alto Douro, e sob a co-orientação do Professor Doutor João Manuel Pereira Barroso, Professor Auxiliar do Departamento de Engenharias da Universidade de Trás-os-Montes e Alto Douro.
Aos meus orientadores, Professor Doutor João Barroso e Professor Doutor Paulo Martins, que sempre tiveram disponibilidade para me ouvir, orientar e interesse em elucidar-me sobre os vários aspectos.
Ao Engenheiro Hugo Paredes, que me ajudou muito mostrando-me novos caminhos a seguir e perspectivas interessantes sobre vários assuntos abordados nesta investigação. Também as suas críticas e questões em muito valorizaram o desenvolvimento deste trabalho.
Ao Centro de Informática da UTAD e em especial ao Engenheiro António Costa por me ter orientado nas questões técnicas dos equipamentos usados na rede com e sem fios da Universidade.
À UTAD por ter disponibilizado os meios necessários para a realização deste projecto.
Aos meus amigos e colegas de curso não só pelos conhecimentos transmitidos e trocas de ideias, como também pela amizade e companheirismo. Agradeço ao meu grande amigo Filipe Fagundes, que com os seus palpites e ideias tornaram o método de localização mais eficaz, e também ao David Ribeiro, que na parte final deste trabalho de investigação me aconselhou e mostrou melhores maneiras de expor este documento.
Aos meus pais Augusto e Idália que sempre me apoiaram e incentivaram a continuar a minha progressão académica e que sem o seu amor me teria sido impossível chegar ao fim desta dissertação.
Um especial agradecimento à Teresa, que com a sua paciência e carinho me levou a dar o meu melhor durante este trabalho de investigação.
Resumo
A disseminação da tecnologia Wi-Fi para dispositivos móveis (telemóveis, PDA e portáteis) contribuiu em muito para a evolução e generalização das redes Wi-Fi tanto em ambiente empresarial como académico, sendo muitas as organizações que actualmente optam pela flexibilidade e mobilidade das redes Wi-Fi. Tanto dentro de edifícios como em exteriores encontram-se facilmente pontos de acesso Wi-Fi, que através da sua resultante cobertura tornam possível a instalação de um sistema capaz de localizar dispositivos móveis dentro de uma rede Wi-Fi.
A localização de dispositivos móveis poderá ser de grande importância para a monitorização e gestão de recursos humanos das organizações, uma vez que a localização dos dispositivos frequentemente corresponde à localização do seu utilizador e o facto de termos a posição dos utilizadores possibilita um grande número de aplicações sensíveis ao contexto. São várias as aplicações que podem ser dadas à informação sobre a localização de dispositivos e consequentemente dos seus utilizadores, podendo esta ser usada por eles em aplicações resultantes da informação sobre o local onde se encontram ou ser usada globalmente pelo sistema para fins estatísticos e para fins de monitorização da rede, possibilitando, caso seja necessário um mais fácil escalonamento desta.
Este documento tem como objectivo apresentar um algoritmo de localização de dispositivos móveis em redes Wi-Fi computacionalmente leve, não descurando o estudo dos sistemas considerados de referência e da própria tecnologia Wi-Fi, que são essenciais à obtenção de know-how nesta área. Ao longo desta exposição, procura-se determinar a aplicabilidade do algoritmo numa plataforma especificamente desenvolvida sobre a infra-estrutura Wi-Fi da UTAD, cenário ideal para mostrar as suas características predominantes: fácil de implementar sobre qualquer rede Wi-Fi, sem grandes calibrações, mas que seja capaz de bons resultados em termos de precisão na localização dos dispositivos móveis.
Abstract
The spread of Wi-Fi technology in mobile devices (mobile phone, PDA and portable) has contributed to the evolution and spread of Wi-Fi networks in both academic and business environment, and now many organizations have adopted Wi-Fi networks, because of its flexibility and mobility. Both inside buildings and outside, it is easy to find access points and a near total Wi-Fi coverage, which is a prerequisite for the deployment of a system capable of locating mobile devices within a Wi-Fi network.
Information on the location of mobile devices may be of great importance for the monitoring and management of human resources of organizations, since the information on the location of mobile devices often corresponds to the location of its users. There is a vast array of applications that can use the information on the location of devices and it can be used by applications sensitive to the context, giving the user's mobile device information on where he is, it may be also used for statistical purposes and to monitor the network, enabling an easier scalability of the network where it is needed.
This document aims to describe all the work related to the creation of one Wi-Fi mobile device location algorithm, not forgetting the study of existing systems considered of reference and the description of Wi-Fi technology, which are essential to obtain know-how in this area. Throughout this exhibition it is determined the applicability of an algorithm not only easy to implement at any place, which can work without major calibrations, but also capable of good results in terms of location precision.
Índice
1. INTRODUÇÃO ...1
1.1 MOTIVAÇÃO...3
1.2 OBJECTIVOS ...4
1.3 ESTRUTURA DA DISSERTAÇÃO ...4
2. REVISÃO DOS SISTEMAS DE LOCALIZAÇÃO EM REDES WI-FI ...7
2.1 INTRODUÇÃO ...7
2.2 SISTEMAS DE LOCALIZAÇÃO BASEADOS EM REDES WI-FI ... 11
2.2.1 Projecto RADAR ... 11
2.2.2 Cisco Wireless Location Services ... 14
2.2.3 Projecto desenvolvido na Universidade Rey Juan Carlos ... 17
2.2.4 Projecto desenvolvido na Universidade de Berlim ... 19
2.2.5 Projecto desenvolvido na Universidade Rice ... 20
2.2.6 Projecto desenvolvido na Universidade de Southern Califórnia ... 23
2.2.7 Projecto Horus desenvolvido na Universidade de Maryland ... 24
2.2.8 Projecto desenvolvido na Universidade de Freiburg ... 26
2.2.9 Projecto desenvolvido pelo SENSEable City Laboratory... 28
2.2.10 Sistema desenvolvido pela Ekahau ... 30
2.3 CONCLUSÃO ... 31
3. ESPECIFICAÇÃO DOS SINAIS WI-FI ... 35
3.1 INTRODUÇÃO ... 35
3.2 FREQUÊNCIA, AMPLITUDE E COMPRIMENTO DE ONDA ... 36
3.3 ATENUAÇÃO ... 39
3.4 GANHO ... 41
3.5 RELAÇÃO SINAL-RUÍDO ... 42
3.6 REFLEXÃO E REFRACÇÃO EM WI-FI ... 42 3.7 MULTIPATH... 43 3.8 CONCLUSÃO ... 44 4. PLATAFORMA DE LOCALIZAÇÃO ... 45 4.1 INTRODUÇÃO ... 45 4.2 INICIATIVA E-U ... 46 4.3 A ARQUITECTURA DA PLATAFORMA ... 47
4.4 IMPLEMENTAÇÃO DOS COMPONENTES ... 50
5. MÉTODO DE LOCALIZAÇÃO DESENVOLVIDO... 53
5.1 INTRODUÇÃO ... 53
5.2 ESPECIFICAÇÃO DO MÉTODO ... 54
5.2.1 Levantamento de requisitos ... 54
5.2.2 Sistema de coordenadas ... 57
5.2.3 Modelação do processo de localização... 58
5.3 IMPLEMENTAÇÃO DO MÉTODO ... 63
5.3.1 Agente de aquisição de sinal ... 63
5.3.2 Algoritmo de localização ... 64
5.3.3 Modos de funcionamento ... 68
5.4 CONCLUSÃO ... 69
6. TESTES E RESULTADOS ... 71
6.1 INTRODUÇÃO ... 71
6.2 VERIFICAÇÃO DO COMPORTAMENTO DAS ONDAS WI-FI... 72
6.3 CONDIÇÕES DE TESTE ... 75
6.4 TESTES COM DIFERENTES DISPOSITIVOS MÓVEIS ... 76
6.5 TESTES EM DIFERENTES ALTURAS DO DIA ... 77
6.6 CONCLUSÃO ... 78
7. CONCLUSÕES ... 81
Índice de Figuras
FIGURA 1–ROBÔ COM PORTÁTIL ACOPLADO PARA A FASE DE TREINO ... 10
FIGURA 2–RELAÇÃO DA DISTÂNCIA E POTÊNCIA DOS SINAIS WI-FI RECEBIDOS PELOS AP ... 14
FIGURA 3-COMPONENTES DA SOLUÇÃO DE LOCALIZAÇÃO DA CISCO ... 15
FIGURA 4- MAPA DE INTENSIDADE SIMULADO PARA O AP1 ... 18
FIGURA 5-MAPA DE INTENSIDADE SIMULADO PARA O AP3 ... 18
FIGURA 6-POSIÇÕES ESTIMADAS COM O MAPA DE INTENSIDADE ... 19
FIGURA 7-POSIÇÕES ESTIMADAS COM O MODELO DE PROPAGAÇÃO ... 19
FIGURA 8-RELAÇÃO ENTRE POTÊNCIA DE SINAL EMITIDA E RECEBIDA ... 21
FIGURA 9-PLANTA DO EDIFÍCIO SAL2 ... 23
FIGURA 10-AUTO-CORRELAÇÃO ENTRE AS POTÊNCIAS DE SINAIS VINDOS DE UM AP... 25
FIGURA 11-DETERMINAÇÃO DE POSIÇÃO COM E SEM A PLANTA ... 28
FIGURA 12-LOCALIZAÇÃO DE DISPOSITIVO WI-FI COM DIAGRAMAS DE VENN ... 29
FIGURA 13–REPRESENTAÇÃO GRÁFICA DE UMA ONDA WI-FI ... 37
FIGURA 14-REPRESENTAÇÃO DA ZONA FRESNEL,ADAPTADO DE:[ISA,2007] ... 40
FIGURA 15-ATENUAÇÃO DE SINAIS RÁDIO (1.5GHZ) REGISTADOS EM RELAÇÃO À DISTÂNCIA PERCORRIDA,ADAPTADO DE: [SALEH, ET AL.,1987] ... 40
FIGURA 16–REFLEXÃO E REFRACÇÃO DE SINAIS WI-FI ... 43
FIGURA 17–REPRESENTAÇÃO SIMPLES DO FENÓMENO DE MULTIPATH ... 44
FIGURA 18-ESTRUTURAÇÃO LÓGICA DA PLATAFORMA DE SERVIÇOS DE LOCALIZAÇÃO, ... 48
FIGURA 19-DIAGRAMA DA PLATAFORMA DE LOCALIZAÇÃO APLICADA À REDE E-U DA UTAD, ... 51
FIGURA 20-WEB SERVICES DA PLATAFORMA DE SERVIÇOS DE LOCALIZAÇÃO ... 52
FIGURA 21-DIAGRAMA DE CASOS DE USO DO PROCESSO DE LOCALIZAÇÃO... 55
FIGURA 22-DIAGRAMA DE CASOS DE USO DO AGENTE DE AQUISIÇÃO DE DADOS ... 57
FIGURA 23-PONTOS DE ACESSO COMO PONTO DE REFERÊNCIA ... 58
FIGURA 24–INTEGRAÇÃO DO NOVO PROCESSO DE LOCALIZAÇÃO NA ESTRUTURA LÓGICA DA PLATAFORMA DE SERVIÇOS DE LOCALIZAÇÃO ... 59
FIGURA 25-DIAGRAMA DE ACTIVIDADES DO PROCESSO DE LOCALIZAÇÃO ... 60
FIGURA 26-DIAGRAMA DE ACTIVIDADES DO AGENTE DE AQUISIÇÃO DE DADOS ... 62
FIGURA 27-CIRCUNFERÊNCIA DA DISTÂNCIA AO AP ... 64
FIGURA 28-INTERSECÇÃO DE DUAS CIRCUNFERÊNCIAS ... 65
FIGURA 29-INTERSECÇÃO DE TRÊS CIRCUNFERÊNCIAS ... 66
FIGURA 30-RECTAS DE INTERSECÇÃO DAS CIRCUNFERÊNCIAS DE DISTÂNCIA ... 67
FIGURA 32-ESQUEMA DO FUNCIONAMENTO DA LOCALIZAÇÃO EXPLÍCITA ... 69
FIGURA 33-GRÁFICO COM AS VARIAÇÕES DE SINAL EM TRÊS CASOS DISTINTOS... 73
FIGURA 34-GRÁFICO COM A ANÁLISE DA VARIAÇÃO DOS RSSI EM DIFERENTES CONDIÇÕES ... 74
FIGURA 35-DEMONSTRAÇÃO DAS DISTÂNCIAS ESTIMADAS PELO MODELO DE PROPAGAÇÃO ... 75
FIGURA 36-ESPAÇO DE LOCALIZAÇÃO CONSIDERADO PARA TESTES ... 76
FIGURA 37-GRÁFICO DO ERRO MÉDIO NA LOCALIZAÇÃO DE DIFERENTES DISPOSITIVOS MÓVEIS ... 77
FIGURA 38-PLANTA COM AS POSIÇÕES REAIS DO DISPOSITIVO MÓVEL E AS POSIÇÕES ESTIMADAS PELO ALGORITMO ÀS 16 HORAS... 78
Índice de Tabelas
TABELA 1-SUMÁRIO DOS SISTEMAS DE LOCALIZAÇÃO EM WI-FI ESTUDADOS ... 33Acrónimos
No decorrer desta dissertação encontrar-se-ão acrónimos, estando representados os seus significados na lista abaixo, no entanto, para comodidade do leitor, sempre que um acrónimo aparece pela primeira vez na dissertação é apresentado qual o seu significado. AIT Atomic International Time
AoA Angle of arrival
AP Access Point
dBm Decibéis
FCCN Fundação para a Computação Científica Nacional
GPS Global Positioning System
GSM Global System for Mobile Communications
IAT International Atomic Time
IEEE Institute of Electrical and Electronic Engineers
MAC Media Access Control
MIT Massachusetts Institute of Technology
MNN Multiple Nearest Neighbor
PDA Personal Digital Assistant
RADIUS Remote Authentication Dial In User Service
RF Rádio Frequência
RSSI Received Signal Strength Indicator
RTLS Real-Time Location System
SNMP Simple Network Management Protocol
SNR Signal to Noise Ratio
SS Signal Strength
SSID Service Station Identifier
TDoA Time Difference of Arrival
ToA Time of Arrival
UMIC Agência para a Sociedade do Conhecimento
UTAD Universidade de Trás-os-montes e Alto Douro
UTC Universal Time Coordinated
WCS Wireless Control System
WEP Wired Equivalent Privacy
WGS Worldwide Geodic System
Wi-Fi Wireless Fidelity
WLAN Wireless Local Area Network
Capítulo I
1. Introdução
As redes Wireless Fidelity (Wi-Fi) surgiram em 1999 com o lançamento da norma 802.11, pelo Institute of Electrical and Electronic Engineers (IEEE). Mais tarde foram adicionados, entre outros, os suplementos 802.11b, 802.11g e brevemente o suplemento 802.11n que actualmente é considerado um draft da futura norma.
O termo Wi-Fi foi criado pela empresa de marketing Interbrand a pedido da Wi-Fi Alliance e é utilizado para designar o conjunto ou apenas um elemento da família de normas 802.11 do IEEE. A Wi-Fi Alliance tem como objectivo garantir a interoperabilidade entre dispositivos Wi-Fi de diferentes fabricantes, tendo desde o ano 2000 certificado mais de 3500 dispositivos [Wi-Fi Alliance, 2007]. Antes do aparecimento da Wi-Fi Alliance o mercado encontrava-se dominado por um conjunto de tecnologias de rede rádio proprietárias muito semelhante à norma 802.11, contudo não garantiam interoperabilidade entre fabricantes, como é o caso da WaveLAN.
AWaveLan, criada em 1990, foi a primeira tecnologias de rede rádio a ter uma grande aceitação do mercado e mostrou as potencialidades deste tipo de redes, principalmente a nível da mobilidade facultada aos utilizadores que as usam e à fácil instalação e conexão de diversos dispositivos à rede.
Para existir uma chamada rede Wi-Fi são necessários pelo menos dois dispositivos que por meio de antenas garantam a recepção e transmissão de ondas rádio a uma frequência acima dos 2.4 GHz e com a capacidade de modular e demodular esses sinais. Os sinais Wi-Fi serão especificados com mais detalhe no capítulo 3 desta dissertação.
Existem vários dispositivos que podem integrar uma rede Wi-Fi: o telemóvel, o computador portátil, o Personal Digital Assistant (PDA), o computador pessoal e o ponto de acesso (AP, do inglês Access Point). O AP distingue-se dos outros dispositivos, pois permite que vários dispositivos Wi-Fi possam comunicar dentro da mesma rede podendo, por exemplo, fazer de interface entre uma infra-estrutura de rede por cabo e um conjunto de dispositivos Wi-Fi. Outra característica do AP prende-se com o facto de conseguir comunicar com outros dispositivos Wi-Fi desde várias dezenas de metros até a alguns quilómetros, estando estes valores dependentes de diversos factores, tais como: a antena usada, a potência de transmissão, a presença de obstáculos (paredes, árvores, etc.), e o ângulo e direcção de transmissão da antena. Tipicamente o alcance efectivo de um AP é de cerca de 35 metros em interiores e 110 metros em exteriores [HP Invent, 2002].
Qualquer dispositivo que suporte a tecnologia Wi-Fi poderá associar-se a um AP para usufruir dos serviços disponibilizados pela infra-estrutura de rede, no entanto, também é possível dispositivos Wi-Fi comunicarem directamente, formando as chamadas redes ad-hoc. A nível de segurança de rede, algumas medidas de segurança poderão estar activadas no AP, fazendo com que o dispositivo Wi-Fi só consiga concretizar a associação se estiver devidamente autenticado, seja esta feita com Wired Equivalent
Privacy (WEP) ou com o uso de uma lista de controlo de acesso por endereço Media Access Control (MAC). Porém, estes métodos de segurança contêm algumas
fragilidades que têm vindo a ser alvo de estudo [Helleseth, 2006]. O principal problema reside na natureza do meio transmissão, o ar, que tem tornado árdua a tarefa de proteger as redes Wi-Fi. No entanto com a introdução em 2003 do Wi-Fi Protected Access (WPA) e dos seus protocolos de autenticação da norma 802.11i [Baek, 2004], tornou-se mais difícil o acesso não autorizado em redes Wi-Fi. Esta segurança, aliada à mobilidade inerente das redes Wi-Fi, foram os factores decisivos para a adopção e implementação destas redes em larga escala, cobrindo em muitos casos, grandes extensões. Em Portugal, são exemplo disso todas as instituições de ensino superior, que
ao beneficiarem do projecto e-U também conhecido como “Campus Virtual” [e-U, 2006], cobriram os espaços interiores e mesmo alguns espaços exteriores com redes Wi-Fi.
1.1 Motivação
Há nas redes Wi-Fi um grande potencial para um vasto número de aplicações e serviços [Nunes, 2006], nascidas do simples facto de o utilizador se encontrar livre, durante grandes períodos de tempo, de ligações físicas que limitariam a sua mobilidade.
Existe, neste contexto, um conjunto alargado de aplicações que tem vindo a ser desenvolvido, sendo a localização de utilizadores uma delas. Numa rede equipada com um sistema capaz de determinar a localização de cada um dos seus utilizadores é possível, por exemplo, detectar intrusos na rede ou mesmo o roubo de equipamentos que estejam a comunicar por Wi-Fi [Tao, 2003]. Podem também ser implementadas soluções em termos de administração, dando a capacidade ao gestor da rede sem fios de poder analisar quais os pontos onde a cobertura da rede é insuficiente ou até saber onde os utilizadores passam mais tempo ligados à rede, o que pode ajudar na tarefa de adaptar a disposição dos APs aos hábitos dos utilizadores.
Outra aplicação que tem estado muito em voga tem sido a disponibilização de conteúdos baseados na localização do utilizador [Song, 2006] [Hazas, 2004]. Têm sido desenvolvidos e implementados sistemas deste tipo, por exemplo, em museus e galerias de arte. Nestes cenários, são disponibilizados aos visitantes PDAs que lhes vão mostrando informação contextualizada, onde para comodidade do utilizador é apenas apresentada a informação das obras que se encontram na sua proximidade. O museu Pergamon de Berlim é um exemplo onde foi implementado com sucesso um sistema deste género [Sieck, 2006].
1.2 Objectivos
É objectivo deste trabalho conceber um algoritmo de localização capaz de localizar dispositivos móveis na rede Wi-Fi da UTAD, salvaguardando também a necessidade de tornar fácil a sua implementação em outros locais onde as infra-estruturas de rede possam ser diferentes. Pretende-se também elaborar um trabalho inicial de investigação da tecnologia de redes sem fio Wi-Fi e de diversos sistemas de localização, considerados relevantes no presente contexto.
Esta dissertação teve igualmente o objectivo de criar know-how na área de sistemas de localização baseados em redes Wi-Fi, pretendendo deixar orientações e ideias concretas quanto a futuros aperfeiçoamentos desta técnica de localização e clarificar as condicionantes impostas pelas características das ondas Wi-Fi, que são o recurso fundamental deste tipo de sistemas de localização.
1.3 Estrutura da dissertação
O presente documento está organizado em 7 capítulos onde, para além deste capítulo introdutório, é possível identificar duas partes distintas e complementares. A primeira parte abrange os Capítulos 2, 3 e 4, e resume toda a investigação efectuada relativamente a técnicas e tecnologias envolvidas na localização de dispositivos móveis em redes Wi-Fi. Estes capítulos servem de base à segunda parte da dissertação, uma vez que ajudam à compreensão das problemáticas envolvidas nesta área. A segunda parte deste documento baseia-se numa componente prática, encontrando-se nela descrito o desenvolvimento de um algoritmo de localização e os testes que descrevem o seu comportamento em relação a vários factores que possibilitaram tirar conclusões quanto ao trabalho desenvolvido. Esta última parte é composta pelos Capítulos 5, 6 e 7.
No Capítulo 2 são apresentados vários sistemas de localização em redes Wi-Fi, fazendo uma revisão dos contributos mais relevantes para o avanço das soluções de localização
em redes Wi-Fi. Nesta revisão analisam-se arquitecturas e métodos de localização utilizados em vários projectos de referência.
O Capítulo 3 descreve as características dos sinais Wi-Fi, mostrando a complexidade do seu comportamento, principalmente no interior de edifícios. São também apresentados alguns modelos matemáticos que descrevem a propagação de ondas rádio.
No Capítulo 4 é apresentada a plataforma de serviços de localização de utilizadores da rede Wi-Fi da UTAD, desenvolvida no âmbito das disciplinas de Projecto I e II do Mestrado em Informática, tendo eu integrado este grupo de trabalho conjuntamente com o colega Filipe Fagundes [Fagundes, 2006]. De modo a melhor situar o âmbito da plataforma de serviços de localização também é descrita a iniciativa nacional e-U.
No Capítulo 5 é explicado o método de localização desenvolvido, começando pela sua especificação, mais propriamente abordando os requisitos para seu correcto funcionamento. Em seguida é apresentada a implementação deste método de localização, sendo descrito todo o trabalho prático que esteve envolvido, nomeadamente, ao nível do agente de aquisição de sinal, o algoritmo de localização e os seus modos de funcionamento.
O Capítulo 6 expõe os resultados práticos do algoritmo baseado no método de localização desenvolvido, mostrando qual a sua precisão e adaptabilidade a vários factores que influenciam a localização.
No Capítulo 7 são apresentadas as conclusões da dissertação, sendo apresentados os objectivos alcançados. E por fim, são também apresentadas algumas sugestões para trabalhos futuros, nomeadamente a integração de novas varíaveis e aperfeiçoamentos ao método de localização desenvolvido.
Capítulo II
2. Revisão
dos
sistemas
de
localização em redes Wi-Fi
2.1 Introdução
A necessidade de compreender como a localização de dispositivos móveis é feita em redes Wi-Fi, tornou imprescindível a realização de um estudo de alguns sistemas de localização em redes Wi-Fi, analisando as várias arquitecturas usadas, bem como os métodos de localização que certos investigadores usaram para conseguirem chegar a bons resultados. Assim este capítulo começa por introduzir os motivos que levaram a comunidade científica a interessar-se no desenvolvimento de sistemas de localização que operam especificamente em redes Wi-Fi. De seguida é apresentada uma descrição de dez sistemas de localização de referência, que foram escolhidos não só pela sua qualidade mas também de modo a que se chegasse a um conjunto diversificado em termos de soluções. Por fim é feita uma análise comparativa entre os sistemas de localização, classificando-os segundo vários critérios.
A tecnologia Wi-Fi é recente e tem grandes potencialidades como tecnologia de suporte a aplicações que requerem mobilidade e flexibilidade, tendo desde 1999 vindo a despertar o interesse dos investigadores em todo o mundo. A instalação em massa de redes Wi-Fi em locais públicos e privados como, por exemplo, escolas, hospitais, e
centros comerciais, vieram viabilizar os sistemas de localização baseados em redes Wi-Fi. A fiabilidade destes sistemas tem dependido directamente dos métodos de localização, da complexidade das áreas em estudo (interiores e exteriores) e da tecnologia de infra-estrutura.
Desde o aparecimento da tecnologia Wi-Fi que têm vindo a ser desenvolvidos vários métodos para determinar a localização de dispositivos, mas parte destes revelaram-se impraticáveis devido às grandes condicionantes impostas pelos seus criadores, os quais fixavam em demasia a solução ao caso em estudo, não encontrando uma resposta genérica, capaz de ser aplicada a outras disposições de pontos de acesso (APs) ou a outros locais.
Foram também desenvolvidos vários sistemas de localização em redes Wi-Fi que focavam o seu funcionamento em corredores, estando optimizados e testados para funcionar apenas nestes locais. A finalidade destes sistemas consiste em localizar dispositivos móveis, normalmente um computador portátil em movimento ou um robô com um adaptador de rede Wi-Fi incorporado, com a finalidade de guiá-los a um destino. O facto de condicionar o posicionamento dos dispositivos aos corredores de um qualquer edifício torna um sistema de localização mais preciso, uma vez que há um percurso previsível a seguir, sem grandes áreas abertas, as quais são propícias à imprecisão da localização do dispositivo. Estes problemas de imprevisibilidade da potência do sinal nas áreas mais abertas são causados pela grande quantidade de pessoas e objectos em movimento entre os dispositivos móveis e os APs, contribuindo também a multiplicidade de trajectos que um utilizador de um dispositivo móvel poderá seguir. A grande desvantagem destes sistemas é clara, pois não têm grande aplicabilidade à localização de utilizadores na rede Wi-Fi em todo o tipo de espaços.
Mais recentemente têm ainda vindo a ser desenvolvidos sistemas de localização que têm em conta a planta do local em causa. Tal tornou-se necessário na localização em interiores devido ao impacto causado nos sinais Wi-Fi pela disposição e tipo de materiais usados na construção, incluindo as paredes, portas e pilares. Estes últimos influenciam também o modo como os utilizadores se movimentam por um dado local, estando limitado pelas condicionantes físicas que lhe são impostas, não podendo, por exemplo, transpor paredes sem que exista uma porta nesse local. Tendo em conta isto, é
de grande importância considerar a planta do edifício como mais um factor que irá influenciar a determinação da posição de dispositivos móveis que usem Wi-Fi.
Quanto à implementação dos sistemas de localização, verifica-se que estes podem ser alojados nos próprios dispositivos móveis, de onde é possível obter a potência do sinal em relação a cada um dos APs em alcance, ou podem estar alojados em servidores, de onde é feito todo o processamento da localização dos dispositivos móveis e são obtidas as potências dos sinais Wi-Fi através dos APs ou dos próprios dispositivos móveis. Esta diferença em relação ao local onde a localização é processada leva a que os sistemas de localização possam ser classificados em termos de localização do processamento, a qual poderá ser explícita ou implícita [Martins, 2006]. A localização implícita significa que a própria aplicação do dispositivo móvel processa toda a informação relativa à sua localização. Por outro lado, a localização explícita significa que a informação sobre a localização dos dispositivos móveis é obtida pelas aplicações através de um serviço, sendo toda a informação relativa à localização dos utilizadores processada externamente, de um modo centralizado (um servidor) ou distribuído (dois ou mais servidores).
Grande parte dos sistemas de localização em redes Wi-Fi funcionam em duas fases: uma fase de treino (fase offline) e uma fase de determinação de localização (fase
online). Na primeira fase, é feita a recolha de todas as potências de sinais Wi-Fi
recebidas por um dispositivo móvel, sendo isto feito em várias posições do espaço de localização que servirão de pontos de referência. Em cada posição, o dispositivo móvel fica à escuta em toda a gama de frequências utilizadas pela norma Wi-Fi e regista as potências de sinais recebidos e o Service Station Identifier (SSID) do respectivo AP. As posições registadas formam normalmente uma grelha de posições, contudo há casos onde somente são feitos os registos dos sinais Wi-Fi em posições consideradas estratégicas para o sistema de localização. Para cada posição registada, é feita a média da potência de sinal para cada AP em alcance e é sobreposto ao mapa do espaço de localização, construíndo assim o chamado mapa rádio. A este processo de criação de um mapa rádio é dado o nome de RF fingerprinting [Claro, 2006], podendo ser facilitado e automatizado com o uso de um robô (Figura 1), que vai associar as diferentes potências de sinais Wi-Fi às suas coordenadas espaciais, necessitando para tal de possuir um método de localização complementar baseado em sensores visuais ou em odometria. A
odometria consiste em determinar a localização de um objecto onde, dada a sua posição inicial, vai sendo depois recalculada periodicamente a nova posição com base em vários sensores (normalmente colocados nas rodas) que determinam o espaço percorrido pelo robô e em que sentido. Assim, com a odometria obtém-se um método de localização complementar eficaz, mas, ao calcular a sua localização, os erros de cálculo são acumulados, uma vez que a posição anterior é dada como garantida e os novos valores são somados a esta. Isto provoca erros de localização consideráveis para distâncias com centenas de metros, sendo necessário recolocar no mapa manualmente a posição do robô de tempo a tempo.
Figura 1 – Robô com portátil acoplado para a fase de treino Fonte: [Serrano, 2004]
Após esta fase de treino, os sistemas de localização de dispositivos móveis em Wi-Fi ficam com uma colecção de mapas rádio (um mapa para cada AP), os quais funcionam como um repositório de potências de sinal em cada posição do mapa. Assim os sistemas de localização conseguem comparar os valores das potências dos sinais Wi-Fi recebidos nos dispositivos móveis com os valores guardados nas diferentes posições do mapa rádio. Esta comparação de posições e sinais Wi-Fi pode ser feita segundo diversas técnicas, contudo podem-se distinguir dois grandes grupos de técnicas de localização: as técnicas determinísticas e as técnicas probabilísticas.
As técnicas determinísticas usam um valor escalar da potência do sinal e através de técnicas de triangulação ou trilateração fazem aproximações da localização dos
dispositivos móveis dentro da rede Wi-Fi usando o angulo ou distância do dispositivo móvel em relação a vários pontos fixos com coordenadas conhecidas [Tan, 1995]. A triangulação e a trilateração são duas técnicas de localização que serão distinguidas posteriormente no Capítulo 5. Os métodos probabilísticos [Roos, 2002], têm como objectivo encontrar qual a posição mais provável para a localização do dispositivo móvel, tendo em conta uma função de probabilidade treinada com um conjunto de amostras correctas e erradas ou modelos de propagação de ondas Wi-Fi.
Fazendo uma breve análise aos sistemas de localização baseados em Wi-Fi que existem, verifica-se que os métodos probabilísticos são mais usados uma vez que têm mais provas dadas em termos de precisão e são mais adaptáveis a diversos ambientes. Para demonstrar qual o estado actual dos sistemas de localização existentes na tecnologia Wi-Fi foi elaborada uma descrição de vários sistemas de localização que são referências nesta área e demonstram as diversas aproximações existentes para se localizar dispositivos móveis em redes Wi-Fi.
2.2 Sistemas de localização baseados em
redes Wi-Fi
2.2.1 Projecto RADAR
O primeiro passo dado no sentido de localizar um dispositivo que use uma tecnologia semelhante à Wi-Fi foi o projecto RADAR [Bahl, 2000]. Neste projecto, usaram a WaveLan, a qual era uma das tecnologias de rede sem fios proprietárias que antecedeu o Wi-Fi. Nesta investigação foram usados computadores pessoais para servirem de estações fixas e estes tinham como função medir a potência do sinal enviado pelo computador portátil. Os criadores do RADAR admitiam que o facto de o sinal ser medido nas estações fixas era uma limitação e que caso fosse necessário seguir um maior número de dispositivos móveis, seria necessário passar à medição da potência de sinal nos dispositivos móveis [Bahl, 2000], pois um servidor não teria desempenho computacional suficiente para processar as localizações de um grande número de
dispositivos móveis. Contudo, desde então, o exponencial aumento da capacidade de processamento dos equipamentos, fez com que actualmente os sistemas de localização totalmente centralizados sejam os mais comuns, apresentando como principais vantagens serem menos intrusivos nos vários tipos de clientes, e tornarem mais fácil a aplicação dos sistemas de localização em Wi-Fi a vários tipos de equipamentos e sistemas operativos dos dispositivos clientes.
O RADAR funcionava em duas fases: uma offline, na qual era efectuado o treino do sistema, e outra online, tendo a explicação destas já sido feita na introdução deste capítulo. Neste caso específico, a fase online poderia funcionar em tempo real ou então poderia funcionar em duas sub-fases, sendo primeiro feita toda a aquisição de dados do dispositivo móvel e posteriormente feita a análise ao percurso seguido pelo dispositivo móvel durante o intervalo de tempo monitorizado. Para o dispositivo móvel ser localizável este tinha de emitir periodicamente um sinal broadcast (cerca de 4 por segundo) para que cada estação fixa o pudesse receber e medir em termos da potência de sinal recebida e sincronizar através de um timestamp. O timestamp identifica de modo inequívoco um instante com uma precisão máxima de 1 segundo, sendo um número inteiro que representa quantos segundos passaram desde as 00h00m de 1 de Janeiro de 1970 na hora Universal Time Coordinated (UTC), de termo atómico normalizado, que define o Atomic International Time (AIT).
Na fase offline, o utilizador tinha de indicar num mapa qual a sua coordenada espacial (x,y) como também a sua orientação (d), a qual era necessária pois o utilizador formava uma grande obstrução aos sinais Wi-Fi numa direcção, podendo deturpar a localização caso não tivesse sido tida em conta. Por fim era registado o timestamp (t) e os dados inseridos pelo utilizador eram guardados num tuplo com o formato (t, x, y, d).
Nesta mesma fase, do lado das estações fixas, era atribuído o timestamp para cada registo de posição que chegasse do dispositivo móvel, implicando assim uma sincronização de todos os relógios das estações fixas. Para calcular a localização do dispositivo móvel, os sinais das diferentes estações fixas eram comparados, juntando os valores com o mesmo timestamp numa tabela com os tuplos do tipo (x, y, d, SSi, SNRi)
onde i 1,2,3 , correspondendo a qual das três estações fixas pertencia o tuplo. A cada
Signal Strength) e a relação sinal/ruído (SNR, do inglês Signal to Noise Ratio) dos
sinais Wi-Fi. Para cada valor de i era calculada a média, o desvio padrão e a mediana da potência dos sinais Wi-Fi.
Para calcular a posição do dispositivo móvel era necessário comparar as potências dos sinais recebidos pelas três estações fixas com as amostras recolhidas na fase offline de treino. Ao encontrar a amostra que mais se assemelha ao sinal actual, encontravam qual era a posição em coordenadas respectivas para aquele conjunto de potências de sinais. Nesta pesquisa foi usada a técnica de Multiple Nearest Neighbour (MNN), que consiste no cálculo da diferença dos sinais Wi-Fi medidos na fase online em relação a todos os sinais registados na fase offline. A menor diferença entre os valores já registados e os que presentemente o dispositivo móvel recebe, indicará qual a posição que o algoritmo estimou, uma vez que é a posição que mais se aproxima das potências de sinal recebidas.
As ondas Wi-Fi têm um comportamento pouco previsível, sendo difícil de afirmar que a distância é o principal factor de atenuação da potência, tal como se pode verificar na Figura 2, onde as três estações fixas (BS1, BS2 e BS3) registaram valores pouco consistentes na relação da distância entre o dispositivo móvel e as estações, com a atenuação da potência do sinal Wi-Fi. Esta fraca correlação entre distância e atenuação foi em grande parte causada pelo local. Tendo em conta estes dados os investigadores concluíram que a disposição das paredes e outros obstáculos influenciaram em muito os resultados [Bahl, 2000].
Figura 2 – Relação da distância e potência dos sinais Wi-Fi recebidos pelos AP Fonte: [Bahl, 2000]
Durante as experiências feitas, os investigadores verificaram que numa dada posição, a potência do sinal variava de cerca de 5 dBm1 e que esta variação era aleatória. Provaram também que a orientação do utilizador numa qualquer localização influenciava a potência de qualquer sinal Wi-Fi recebido.
2.2.2 Cisco Wireless Location Services
A Cisco desenvolveu em 2006 um sistema de localização fácil de instalar e capaz de funcionar totalmente nos equipamentos da rede [Brugman, 2006], sem ter de instalar qualquer tipo de software adicional nos dispositivos a localizar (Figura 3). Apesar de este sistema também funcionar com tags Radio Frequency IDentification (RFID), só irá ser abordada a localização de dispositivos móveis com capacidade Wi-Fi.
1
Figura 3 - Componentes da solução de localização da Cisco Fonte: [Brugman, 2006]
Contudo, para este sistema de localização funcionar é necessário que a infra-estrutura de rede preencha alguns requisitos. Começando pelos APs, estes têm de ser Cisco e têm de ser configurados para trabalhar com o Cisco Wireless Control System (WCS) (Figura 3), limitando logo à partida a integração deste sistema de localização a muitas redes que usam APs de vários fabricantes. Outro requisito para este sistema funcionar é a presença do WCS, que irá calcular a posição dos dispositivos móveis presentes na rede Wi-Fi. Este sistema de localização permite o uso de cinco métodos distintos:
Célula de origem: determina-se a zona em que o dispositivo móvel se encontra
identificando a que AP está associado. Sabendo onde este se encontra e qual a sua área de cobertura, é assim possível identificar a área de cobertura do AP como sendo a zona onde o dispositivo móvel se encontra. A precisão deste método será igual à área de cobertura do AP [Brugman, 2006].
Received Signal Strength Indicator (RSSI): é usado o RSSI de um dispositivo móvel
em relação a um AP como base para o processo de localização, uma vez que a partir deste é possível estimar a distância entre eles. Ao efectuar este cálculo para três RSSI provindos de APs diferentes, é feita a uma tripla relação das respectivas potências de sinal [Brugman, 2006], chegando-se a um ponto estimado de localização. A distância entre dispositivos pode ser calculada através da potência de sinal, usando modelos matemáticos de propagação de sinais Wi-Fi. Este tema será abordado e explicado em
detalhe no Capítulo 3, na secção de atenuação do sinal Wi-Fi. Este sistema de localização faz apenas uma triangulação simples, não tendo em conta certos fenómenos como o de multipath2 e a variação da atenuação do sinal tendo em conta a planta do
edifício. Certos sistemas de localização já usam formas de integrar estes cálculos dinamicamente, aumentando em muito a precisão deste método.
Time of Arrival (ToA): Este método funciona da mesma maneira que o anterior, só que
neste, a distância é calculada tendo em conta o tempo que o sinal demora a percorrer do emissor até ao receptor [Brugman, 2006]. Este método tem o inconveniente de os equipamentos de rede usados terem de estar perfeitamente sincronizados, pois um sinal
Wi-Fi propaga-se a uma velocidade aproximadamente de 3X108 m/s e por este motivo
qualquer desajuste levaria a erros de grandes proporções.
Time Difference of Arrival (TDoA): É uma ligeira adaptação do ToA, mas com a
diferença de serem consideradas as diferenças no tempo de chegar entre o dispositivo e pelo menos três APs [Brugman, 2006]. Este método torna-se mais fiável do que o ToA, uma vez que não usa o valor absoluto do tempo de chegada, o qual poderá estar ligeiramente errado. Ao considerar também a diferença entre os tempos de chegada, o erro provocado será menor.
Angle of Arrival (AoA): Neste método, a posição do dispositivo móvel é calculada com
base no ângulo de incidência em que o sinal é recebido. Quando este processo é repetido para os sinais Wi-Fi provindos de pelo menos 3 APs é possível cruzar os três ângulos obtidos de forma a deduzir qual a posição em que se encontra o dispositivo móvel [Brugman, 2006].
2
Fenómeno inerente à propagação das ondas Wi-Fi que se caracteriza pelo facto de as ondas Wi-Fi não percorrerem sempre o mesmo caminho numa comunicação entre dois dispositivos Wi-Fi.
2.2.3 Projecto desenvolvido na Universidade Rey Juan
Carlos
Na Universidade Rey Juan Carlos, Espanha, foi concluído em 2004 um sistema de localização de dispositivos móveis em redes Wi-Fi que não necessitasse de um mapa de intensidade rádio [Serrano, 2004]. Este mapa foi substituído por um modelo de propagação teórico das ondas Wi-Fi, capaz de localizar dispositivos móveis com uma precisão mais baixa, mas perto das técnicas que usam o mapa de intensidade rádio. Os autores adoptaram uma técnica de aproximação probabilística da posição do dispositivo, a qual constrói e vai actualizando uma grelha de probabilidade do dispositivo estar em cada posição. A posição com maior probabilidade acumulada é escolhida segundo a regra de Bayes, a qual é uma regra matemática (Eq. 2-1) que declara como os dados actuais devem ser afectados pelos anteriores [Murphy, 2006], neste caso combinando os novos dados sobre a nova localização do dispositivo móvel com os já existentes sobre as posições anteriores.
)
(
r)
P(R
r)
R
|
P(e
)
|
(
e
P
e
r
R
P
Eq. 2-1Sendo P(e) a probabilidade do acontecimento anterior ocorrer e P(R=r) a probabilidade do acontecimento posterior acontecer (Eq.2-1). P(R=r|e) é a probabilidade que a variável aleatória R tenha o valor r tendo sido verificado e. O denominador é só uma constante de normalização que assegura que a probabilidade condicionada de P(R=r|e) assume no máximo o valor 1. Tendo em conta a regra de Bayes, a determinação de um nova posição do dispositivo móvel seria influenciada em parte pela sua posição anterior.
Durante os testes foi usado um computador portátil com um adaptador Wi-Fi e este era transportado por um robô pelo espaço das experimentações. Este portátil servia para registar o número de APs acessíveis, a potência do sinal recebido para cada um, tal como os seus níveis de erro (ruído).
Actualmente existem vários modelos de propagação Wi-Fi, capazes de representar matematicamente o comportamento das ondas Wi-Fi dentro de edifícios, mas o escolhido pelos autores foi o modelo breakpoint, o qual apenas tem em conta a distância percorrida pelas ondas Wi-Fi, descartando o efeito que certos obstáculos têm na
propagação das ondas Wi-Fi, como por exemplo: as paredes, mobiliário, etc. Com base neste modelo foi então simulado um mapa de intensidade automático para cada um dos três APs usados nesta experiência, podendo ver-se na Figura 4 e na Figura 5 o resultado para dois dos APs usados (AP1 e AP3).
Figura 4 - Mapa de Intensidade Simulado
para o AP 1 Fonte: [Serrano, 2004]
Figura 5 - Mapa de Intensidade Simulado para o AP 3
Fonte: [Serrano, 2004]
O uso de um modelo de propagação permite que seja feita uma estimativa da potência de recepção dos sinais Wi-Fi vindos de todos os APs para todo o espaço de localização. Este modelo de propagação elimina a necessidade de um sistema de duas fases, cortando a fase de treino, onde se fazia o mapa de intensidade rádio de toda a área abrangida pelo sistema de localização. Este é um passo importante, uma vez que se consegue retirar a parte mais morosa da implementação de um sistema de localização sobre a tecnologia Wi-Fi.
Para que fosse possível comparar o desempenho de um modelo de propagação com o de um mapa de intensidade rádio tradicional construído pelo treino de posições, teve de se recorrer a uma fase de treino. Os resultados obtidos pelos dois métodos diferem como podemos ver na Figura 6 e na Figura 7, sendo que para o método do mapa o erro é menor que 1.5 metros em 82.27% dos casos e menor que 3 metros para 97.9% dos casos. Usando o modelo de propagação o erro sobe significativamente, sendo que para
42% dos casos o erro é menor a 1.5 metros e para 83% dos casos está abaixo de 3 metros.
Figura 6 - Posições estimadas com o mapa de intensidade
Fonte: [Serrano, 2004]
Figura 7 - Posições estimadas com o modelo de propagação
Fonte: [Serrano, 2004]
2.2.4 Projecto desenvolvido na Universidade de Berlim
Na Universidade de Berlim, Alemanha, foi desenvolvido um sistema de localização de dispositivos móveis que serve de base para a disponibilização de informação contextual sobre obras de arte do museu Pergamon de Berlim [Sieck, 2006]. A localização baseia-se apenas na cobertura de cada AP Wi-Fi, ou baseia-seja, o utilizador é localizado tendo em conta apenas o AP a que o seu dispositivo móvel se encontra directamente ligado. Isto é conseguido através de pedidos Simple Network Managment Protocol (SNMP) a todos os APs listados na base de dados. Estes pedidos têm como objectivo adquirir a lista de dispositivos directamente ligados a estes. Um AP guarda apenas os endereços MAC dos dispositivos ligados a ele, sendo necessário filtrar os endereços MAC que pertençam à rede interna.
Ao saber a que AP estão ligados os dispositivos móveis é possível saber vagamente a área onde estes se podem encontrar, contudo esta incerteza sobre a localização precisa do dispositivo móvel não afecta a aplicabilidade deste sistema para o caso em estudo, uma vez que são disponibilizadas informações contextuais muito generalistas ao
utilizador, divididas em conformidade com a área coberta por cada AP, sendo neste caso cada um dos salões de exposição de obras de arte.
Um sistema de localização desta natureza implica que cada AP seja colocado estrategicamente e que a informação contextual seja muito bem dividida, de modo a não ocorrerem discrepâncias em relação à informação fornecida e ao local onde se encontra o dispositivo móvel e consequentemente o seu utilizador. Devido à natureza imprevisível dos sinais Wi-Fi em ambientes dinâmicos onde haja muitas pessoas a circular, é às vezes impraticável determinar a localização exacta de dispositivos móveis.
2.2.5 Projecto desenvolvido na Universidade Rice
Na Universidade Rice em Houston, nos Estados Unidos da América, foi desenvolvido um sistema de localização com o objectivo de detectar intrusos na rede Wi-Fi [Tao, 2003]. Neste sistema, a localização de cada dispositivo móvel da rede Wi-Fi é calculada por um servidor, o qual fazia um inquérito periódico a cada um dos APs listados na rede de modo a saber qual a potência de sinal relativa a cada dispositivo móvel que se encontra ligado à rede.
Para funcionar, este sistema de localização necessitava de um mapa de intensidade, o qual era uma planta do edifício com as médias das intensidades de sinal para cada ponto de acesso. No entanto surgiu um problema, pois entre as 8:00 e as 17:00, o ruído dos sinais Wi-Fi era mais significativo, uma vez que se encontravam mais pessoas dentro do edifício, o que comprometeria a precisão da localização. Devido a este facto, os investigadores passaram a ter em conta não só um mapa de intensidade como também um histograma com uma média do ruído de sinal para as diferentes horas do dia.
No decorrer dos trabalhos foi observado que a potência de um sinal Wi-Fi é linearmente proporcional à potência de transmissão, mas como podemos ver na Figura 8, a potência dos sinais recebidos não variam drasticamente com a variação da potência de transmissão. Os autores usaram estas observações para construir um filtro que melhorasse a precisão da localização dos dispositivos móveis.
Figura 8 - Relação entre potência de sinal emitida e recebida Fonte: [Tao, 2003]
Foram testados dois algoritmos de localização com o objectivo de determinar a aplicabilidade de cada um a este sistema: o método de histograma e o método da diferença. O primeiro já tinha sido usado pelos autores em trabalhos anteriores e conseguia bons resultados em termos de precisão da localização dos dispositivos móveis. No entanto, este método não era suficientemente robusto para funcionar em redes Wi-Fi, uma vez que dificilmente conseguia determinar a posição de dispositivos móveis diferentes daqueles usados na fase de treino do sistema de localização. Este problema advinha da diferença que existe entre ganho das antenas de dispositivos móveis diferentes, que causava disparidades na localização dos dispositivos móveis.
Para localizar os dispositivos móveis, o método de histograma usa um esquema de inferência Bayesiana que é um tipo de inferência estatística que descreve as incertezas sobre as quantidades invisíveis de uma forma probabilística. As incertezas são periodicamente modificadas após observações de novos dados ou resultados. A operação que calibra a medida das incertezas é conhecida como operação bayesiana e é baseada na fórmula de Bayes [Ehlers, 2003].
Para implementar este método, foi modelado o espaço de localização como um espaço finito {p1,…,pn} com um espaço de observação também finito {o1,…,om}. O modelo
sensorial criado Pr(oj|pi) é um modelo que se baseia na probabilidade condicional de se
verificar a observação oj na posição pi. O vector de posição π é um vector de
ser a posição actual. Tendo uma estimativa prévia do valor de π, depois de observar oj, é
possível, usando a regra de Bayes, estimar uma nova posição no vector π' calculando as probabilidades condicionais π'i para cada i ∈ {1,…,n} (Eq. 2-2). Depois desde cálculo, é
escolhido como melhor resultado a posição com maior probabilidade, sendo o resultado um tuplo (x, y, z, ), que descreve a posição do dispositivo com as três coordenadas espaciais x, y e z, sendo usado para representar, em graus, o ângulo de orientação do utilizador.
Eq. 2-2
O método da diferença, ao contrário do método de histograma, não se baseia apenas nas potências de sinais treinados, uma vez que estes valores de treino não são totalmente correctos quando o adaptador Wi-Fi do dispositivo é diferente daquele usado nos treinos ou quando o utilizador muda a sua potência de transmissão intencionalmente. Para resolver este problema, o método da diferença não vai basear-se nas potências de sinais treinados e observados, mas sim nas diferenças de potências de sinais entre pares de APs. Assim será possível usar o mesmo mapa de intensidade para detectar vários adaptadores Wi-Fi, mesmo tendo uma potência de transmissão mais alta ou mais baixa.
Quando os dispositivos usavam o mesmo tipo de equipamento daquele com que foi feito o treino, a precisão era bastante alta. Com o método da diferença era possível a localização com um máximo de erro de 2 metros em 61% do tempo, tendo o método do histograma conseguido apenas um erro máximo de 2 metros em 47% dos casos. Quando eram usados outros tipos de dispositivos, a precisão baixava para 49% para o método da diferença e 40% para o método do histograma relativamente a erros máximos de 2 metros. Foram ainda feitos testes em áreas não treinadas, nas quais ambos os algoritmos se revelaram incapazes de localizar o dispositivo, tendo sido apenas possível localizar áreas adjacentes às já treinadas.
Este sistema de localização sacrifica precisão por robustez, conseguindo localizar dispositivos móveis mesmo que estes sejam maliciosos ao ponto de alterarem intencionalmente a sua potência de transmissão de modo a não serem detectados, o que funciona para a maioria dos sistemas. Assim, com a garantia da localização de todos os
dispositivos móveis numa rede Wi-Fi, este projecto é uma mais-valia em termos de avanço da segurança em redes Wi-Fi.
2.2.6 Projecto desenvolvido na Universidade de Southern
Califórnia
Em Julho 2003, foi concluído um estudo feito na Universidade de Southern Califórnia, Los Angeles, EUA [Howard, 2003], que tinha como principal objectivo determinar a aplicabilidade da tecnologia Wi-Fi à localização de dispositivos móveis. As experimentações tiveram lugar nos 4 corredores do edifício “SAL2”, onde estavam dispostos quatro dispositivos (dois PDAs, um portátil e uma unidade Intel Stayton) para servir de estações fixas de medição da potência de sinal. A disposição destes, como podemos ver na Figura 9, foi escolhida de forma a ter os melhores resultados possíveis.
Figura 9 - Planta do edifício SAL2 Fonte: [Howard, 2003]
A metodologia seguida foi muito semelhante à usada na Universidade Rice, sendo usado um algoritmo de inferência Bayesiana, o qual necessitou de um mapa de intensidade rádio. Este estudo destaca-se dos outros na medida em que a fase de treino não necessita de grande intervenção humana, uma vez que esta é feita por um robô equipado com um adaptador Wi-Fi que guarda a cada posição a potência do sinal com os vários dispositivos e coloca estas no mapa de intensidade com o recurso a odometria e a sensores laser instalados. Assim, pela primeira vez, torna-se possível automatizar a árdua tarefa de registar cada posição manualmente, mas esta automatização torna-se algo limitada, pois é apenas apropriada a locais pouco complexos e com poucos
trajectos possíveis como é o caso deste estudo. Se o robô fosse colocado numa área mais aberta, seria difícil a este localizar-se com os sensores e tornar-se-ia impraticável o seu uso na fase de treino. Este estudo acaba por não demonstrar a eficácia do algoritmo de localização em outros ambientes nem os resultados obtidos com outro tipo de adaptadores Wi-Fi.
2.2.7 Projecto Horus desenvolvido na Universidade de
Maryland
Na Universidade de Maryland foi criado em 2005 o sistema de localização Horus [Youssef, 2005] com o objectivo de atingir dois importantes marcos: alta precisão de localização e baixos requisitos computacionais. Graças a técnicas de
“location-clustering”, o algoritmo usado no Horus torna-se muito leve, permitindo a localização
de um grande número de dispositivos móveis [Youssef, 2005]. A alta precisão a que consegue chegar deve-se em grande parte à identificação que o Horus faz às diferentes causas da variação dos sinais Wi-Fi e como ele as consegue resolver.
O Horus é instalado nos dispositivos clientes, local onde mede a potência de sinal recebido vindo de todos os AP alcançáveis pelo cliente. O facto de o Horus estar instalado em cada dispositivo cliente e não num servidor, possibilita a sua abrangência a um maior número de clientes, mas também é menos cómodo para o utilizador.
O sistema Horus funciona também em duas fases, tendo de ser treinado e calibrado na primeira fase de modo a possibilitar a construção de um mapa rádio. O mapa serve de base para o processo de localização dos dispositivos móveis e encontra-se num local acessível pelos vários dispositivos que têm o Horus instalado. Este sistema de localização usa técnicas probabilísticas e a sua implementação foi testada tanto no sistema operativo Windows como também em Unix.
Apesar de a potência de sinal sofrer variações ao longo do tempo, os autores do Horus mostram que a auto-correlação das amostras recolhidas de um ponto de acesso é de 90% para um curto espaço de tempo (Figura 10), tendo proposto um modelo auto-regressivo (Eq. 2-3) para explicar a auto-correlação dos valores.
Eq. 2-3 Nesta equação vt é um processo de ruído e st é uma série que representa as amostras de
um ponto de acesso. Com base neste modelo, os investigadores desenvolveram uma regra (Eq. 2-4) para explicar a variância dos sinais Wi-Fi. Na fase de treino o valor de α é estimado e guardado como o parâmetro de distribuição para que durante a fase de localização, a distribuição Gaussiana seja adaptada com o seu valor.
Eq. 2-4
Figura 10 - Auto-correlação entre as potências de sinais vindos de um AP Fonte: [Youssef, 2005]
Para determinar a localização de um dispositivo, o Horus estima quais os locais p(i) com a maior probabilidade do dispositivo se encontrar, sendo depois achado qual o centro de massa desse conjunto de locais N (Eq. 2-5), os quais são representados por coordenadas espaciais. O centro de massa X calculado passará a ser o novo ponto representativo da localização do dispositivo.
Eq. 2-5
Como a potência dos sinais rádio recebidos pelo dispositivo não são constantes para uma dada posição, o Horus usa um compensador de pequena escala para corrigir estas
variações. O funcionamento do compensador começa por detectar as variações de pequena escala ao calcular a distância entre duas localizações consecutivas estimadas. Assumindo que o dispositivo está em constante movimento, o sistema irá usar o compensador que detecta se a distância limite previamente definida está a ser excedida. Se tal limite for excedido são introduzidas variações artificiais à amostra e o processo de localização é repetido. Por fim, é escolhida a localização mais próxima da última localização estimada.
Para reduzir os requisitos computacionais do Horus, este funciona com a técnica
Incremental Triangulation Clustering [Youssef, 2005], a qual consiste em dividir em
várias partes o ambiente em que o dispositivo a localizar se encontra. Cada uma será composta por um conjunto de APs. Deste modo são analisados apenas os sinais vindos dos APs estritamente necessários à localização não sendo necessário analisar todos os sinais Wi-Fi recebidos pelo dispositivo móvel. Na prática é escolhido qual o AP com a maior potência de sinal recebida no dispositivo cliente e apenas os locais cobertos por este AP são pesquisados, escolhendo-se de seguida um segundo AP baseando-se no mesmo critério e apenas serão pesquisadas as áreas cobertas em comum pelo primeiro e segundo AP.
Neste processo são comparadas as probabilidade das estimativas das localizações e caso, por exemplo, a primeira estimativa tenha a maior probabilidade do que a segunda estimativa, a localização pára e é devolvida à primeira. Este processo é recursivo, podendo verificar-se várias estimativas até se chegar ao resultado pretendido. Com estas técnicas probabilísticas o Horus consegue localizar um dispositivo móvel em redes Wi-Fi com um erro médio de 0,6 metros em 60% dos casos.
2.2.8 Projecto desenvolvido na Universidade de Freiburg
Na Universidade de Freiburg, na Alemanha, foi desenvolvido um sistema de localização de dispositivos móveis em redes Wi-Fi dentro de um edifício com vários andares [Zhou, 2006]. Neste trabalho foi usado como caso de estudo o edifício Computing Center da Universidade de Freiburg.
Este sistema, tal como outros sistemas de localização, tem de ser treinado de modo a obter-se o mapa de intensidade rádio, mas, ao contrário de outros, funciona num modo misto, estando implementado num servidor (onde está alojado o mapa rádio) como também nos clientes que usem o sistema de localização (onde é feito o processo de localização). Outra diferença em relação aos sistemas já abordados reside no facto de este sistema poder prever a localização do utilizador nos próximos instantes. Para prever a localização é necessário ter em conta a potência dos sinais Wi-Fi dos APs que rodeiam o dispositivo, bem como usar o histórico recente da posição do utilizador para saber se o dispositivo tem estado parado ou se encontra em movimento. Caso se encontre parado é muito provável que continue assim, caso esteja em movimento é possível prever quais as possíveis trajectórias que o dispositivo irá seguir na medida em que a mobilidade do seu portador é influenciada por portas, escadas e paredes.
Este método torna possível corrigir os erros em relação a posições com potências de sinal muito semelhantes, mas que são imprescindíveis distinguir, como é o caso de estar do lado de dentro de uma sala ou do lado de fora junto à parede, ou até saber distinguir qual o andar em que o dispositivo se encontra. Para distinguir estes casos Zhouincluiu a planta do edifício para saber quais as limitações nas trajectórias seguidas pelos dispositivos móveis.
Deste modo foi possível formular algumas regras [Zhou, 2006] que ajudaram a reduzir os erros na localização do dispositivo móvel. Assim este sistema não permite que um dispositivo possa mudar de posição sem que este cumpra as limitações em termos de velocidade a que uma pessoa consegue correr (o dispositivo não pode andar a uma velocidade absurda), não pode mudar de andar sem que o dispositivo esteja numas escadas ou num elevador e não pode atravessar paredes exceptuando se aí se encontrar uma porta ou abertura.
A adopção do método determinístico baseado no histórico recente implica o estudo da planta do edifício e a sua aplicação ao sistema de localização de uma forma manual, o que pode ser visto como uma desvantagem. Uma possível optimização do sistema nesta técnica passaria por encontrar uma forma de o sistema de localização analisar de uma forma automática a estrutura do edifício através de uma planta digitalizada. O uso de um histórico recente do utilizador e a inclusão das plantas do edifício provoca, como
podemos ver na Figura 11, uma melhoria da localização dos dispositivos móveis em movimento, reduzindo o erro médio existente em 8,4%, passando assim de 2,27 metros para 2,08 metros.
Figura 11 - Determinação de posição com e sem a planta Fonte: [Zhou, 2006]
As técnicas adaptadas por Zhou conseguem chegar a uma elevada precisão, conseguindo um erro médio de 2,08 metros. Este sistema destaca-se dos outros porque consegue evitar grande parte das falhas que fariam com que os dispositivos parecessem estar a saltar entre posições relativamente distantes e impossíveis de transpor num dado espaço de tempo [Zhou, 2006].
2.2.9 Projecto desenvolvido pelo SENSEable City
Laboratory
O iFind [iFind, 2007] foi implementado no campus do Massachusetts Institute of
Technology (MIT), tendo sido desenvolvido internamente pelo SENSEable City
Laboratory. A aplicação iFind permite que docentes e alunos localizem colegas de trabalho dentro do instituto.
Para localizar os dispositivos móveis, o iFind usa o Place Lab, que é uma applet em Java™ disponível em código aberto. O Place Lab é uma framework criada com a intenção de facilitar o desenvolvimento de aplicações e serviços de localização de variados dispositivos móveis, pois para além de funcionar com a tecnologia Wi-Fi,
também usa bluetooth, GPS e GSM para determinar a localização de dispositivos móveis.
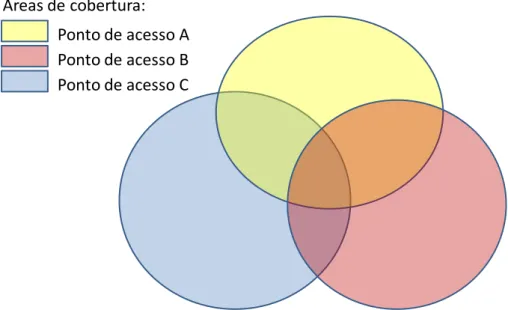
O Place Lab [LaMarca, 2005] contém um conjunto de algoritmos de localização adaptados para GSM, bluetooth e Wi-Fi. Em Wi-Fi o método de localização é baseado em diagramas de Venn, sendo computacionalmente leve, facto provocado pela baixa complexidade dos cálculos envolvidos. Sabendo qual a área de cobertura máxima de cada AP e tendo as coordenadas espaciais de cada AP em alcance do dispositivo móvel (Figura 12), é possível determinar uma área onde o dispositivo móvel provavelmente se encontra. Este método funciona sempre com todos os APs em alcance, resultando que quanto maior for o número de APs em alcance, menor é o erro na localização. Este método funciona mesmo estando apenas um AP em alcance, mas com grandes erros na localização do dispositivo móvel, uma vez que apenas se sabe que o dispositivo móvel se encontra dentro da área de cobertura do AP.
Áreas de cobertura: Ponto de acesso B Ponto de acesso C Ponto de acesso A
A B C = provável localização do dispositivo móvel
Figura 12 - Localização de dispositivo Wi-Fi com diagramas de Venn
Assim, quanto mais densa for a colocação dos APs, maior será a precisão do algoritmo, uma vez que há mais APs para serem cruzados, obtendo uma área de intersecção menor.
Ao usar o Place Lab, o utilizador tem vantagem de poder actualizar a sua base de dados
de APs no seguinte URL: “http://www.wigle.net”3
.
2.2.10
Sistema desenvolvido pela Ekahau
O Ekahau Real-Time Location System (RTLS) foi desenvolvido na Finlândia, pela empresa com o mesmo nome, Ekahau, a qual foi fundada em 2000 [Ekahau, 2007]. O Ekahau é actualmente o sistema de localização mais preciso, estando o erro médio da localização de dispositivos móveis em Wi-Fi abaixo de 1 metro. Esta precisão aliada ao facto da localização ser processada num dispositivo central, permite que seja possível localizar dispositivos móveis com pouco poder computacional e assim possibilita que possam ser localizados com grande fiabilidade os recursos de qualquer tipo de instituição, sejam estes recursos humanos ou materiais.
Este sistema de localização usa mapas de intensidade rádio previamente calculados para poder determinar as posições dos dispositivos móveis, não necessitando de uma elevada concentração de APs para funcionar correctamente. No entanto a fase de calibração é muito minuciosa e tem de ser executada com o maior rigor de modo a que o sistema possa localizar com o mínimo de erros.
Para proceder à localização de dispositivos móveis, o Ekahau RTLS usa actualmente o Ekahau Positioning Engine 4.0, o qual é um servidor baseado em java que disponibiliza diversos serviços de localização a aplicações clientes [Ekahau, 2007]. Dos sistemas de localização revistos, o Ekahau é dos poucos a ser actualmente comercializado, tendo alcançado bons resultados em ambientes hospitalares, na localização de stocks e na indústria automóvel.
3
A 20 de Junho de 2007 já se encontravam 10,736,986 redes Wi-Fi mapeadas por 658,316,510 pontos de observação.
![Figura 1 – Robô com portátil acoplado para a fase de treino Fonte: [Serrano, 2004]](https://thumb-eu.123doks.com/thumbv2/123dok_br/15938241.1095941/26.892.219.675.411.758/figura-robô-portátil-acoplado-para-treino-fonte-serrano.webp)
![Figura 2 – Relação da distância e potência dos sinais Wi-Fi recebidos pelos AP Fonte: [Bahl, 2000]](https://thumb-eu.123doks.com/thumbv2/123dok_br/15938241.1095941/30.892.228.671.114.416/figura-relação-distância-potência-sinais-recebidos-pelos-fonte.webp)
![Figura 3 - Componentes da solução de localização da Cisco Fonte: [Brugman, 2006]](https://thumb-eu.123doks.com/thumbv2/123dok_br/15938241.1095941/31.892.257.637.107.437/figura-componentes-da-solução-localização-cisco-fonte-brugman.webp)


![Figura 8 - Relação entre potência de sinal emitida e recebida Fonte: [Tao, 2003]](https://thumb-eu.123doks.com/thumbv2/123dok_br/15938241.1095941/37.892.226.640.115.370/figura-relação-entre-potência-sinal-emitida-recebida-fonte.webp)
![Figura 9 - Planta do edifício SAL2 Fonte: [Howard, 2003]](https://thumb-eu.123doks.com/thumbv2/123dok_br/15938241.1095941/39.892.137.743.563.804/figura-planta-do-edifício-sal-fonte-howard.webp)
![Figura 10 - Auto-correlação entre as potências de sinais vindos de um AP Fonte: [Youssef, 2005]](https://thumb-eu.123doks.com/thumbv2/123dok_br/15938241.1095941/41.892.210.671.333.739/figura-auto-correlação-potências-sinais-vindos-fonte-youssef.webp)