Capítulo 3
3 Função de transferência em tempo discreto
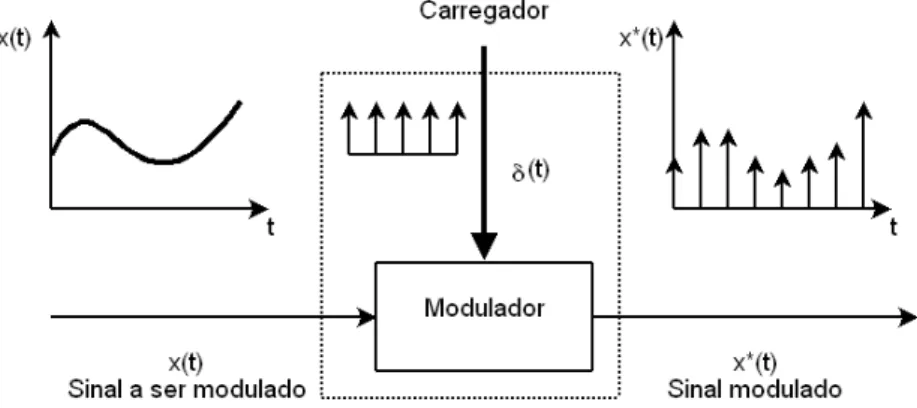
3.1 Amostragem impulsiva
Considerando um sinal x(t) que será amostrado por um amostrador, conhecido como sampler, de tal modo que a intervalos de tempo T, conhecido como tempo de amostragem ou tempo de discretização, ocorra uma leitura, este sinal é dado pela Figura 3.1, e pode ser representado por,
∑
∞=
− δ =
0 k *
) kT t ( ) kT ( x ) t ( x
Figura 3.1: Amostrador impulsivo
Supondo que não são medidos tempos negativos, devido a causalidade, então a equação acima pode ser expandida como,
L
L+ δ − +
+ − δ + δ
=x(0) (t) x(T) (t T) x(kT) (t kT) )
t ( x*
Observe que o δ representa um trem de impulsos e, uma das formas de entender o fenômeno da amostragem é que o sinal x(t) modula o trem de impulsos para formar o sinal amostrado conforme apresentado pela Figura 3.2.
Agora aplicando a Transformada de Laplace no sinal amostrado,
[ ]
[ ]
[
]
[
]
∑
∞=
−
− −
=
+ +
+ =
+ − δ +
− δ +
δ =
=
0 k
kTs
Ts 2 Ts
* *
e ) kT ( x
e ) T 2 ( x e ) T ( x ) 0 ( x
) T 2 t ( L ) T 2 ( x ) T t ( L ) T ( x ) t ( L ) 0 ( x ) t ( x L ) s ( X
L
L
Sabendo-se que a Transformada de laplace de um impulso defasado de a é,
[
]
ase ) a t (
Lδ − = − Então,
∑
∞=
− −
− + + =
+ =
0 k
kTs Ts
2 Ts
*
e ) kT ( x e
) T 2 ( x e ) T ( x ) 0 ( x ) s (
X L
Definindo,
z ln T 1 s z
eTs = ⇒ =
Então,
( )
∑
∞=
−
= =
0 k
k z
ln T 1 s *
z kT x )
s ( X
O lado direito desta equação é a definição de transformada Z da seqüência x(t), então,
) z ( X )
s ( X
z ln T 1 s
* =
=
Desta forma,
) z ( X z ln T 1
X* ⎟=
⎠ ⎞ ⎜
⎝ ⎛
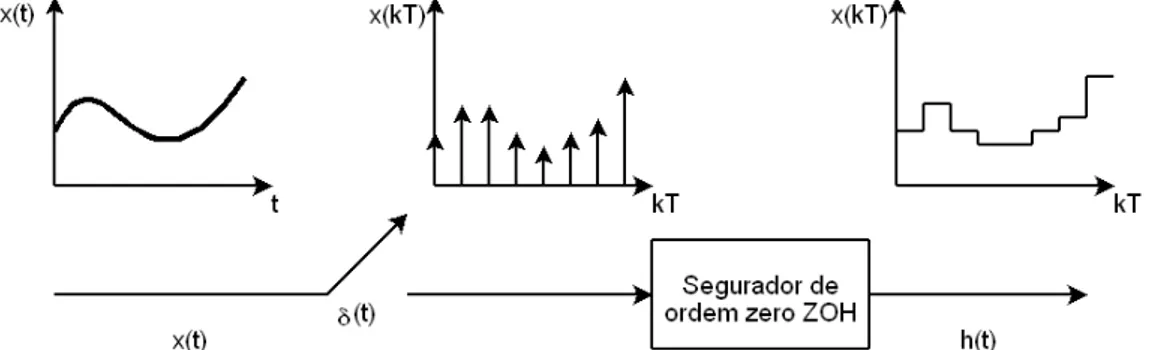
3.2 Circuito Data-Hold
A saída de um amostrador é um trem de impulsos, mas em alguns casos isso não é desejável, e o necessário seria um sinal contínuo, a transformação de um sinal na forma de trem de impulsos em um sinal contínuo pode ser feito por um circuito tipo Data-Hold, que nada mais é do que o processo de se obter um sinal contínuo x(t) de uma seqüência discreta x(kT).
O circuito Data-Hold nada mais é do que um interpolador, isto é, ele gera ou mantém um sinal entre dois impulsos seguindo uma interpolação polinomial na forma,
0 1 1
n 1 n n
n a a a
a ) kT (
h +τ = τ + −τ − +L+ τ+
onde h(kT+τ) é a saída do circuito data-hold. Assumindo x(kT) como o sinal que passará pelo circuito, neste caso, h(kT) deve ser igual a x(kT) para que os sinais sejam os mesmos, então,
) kT ( x a a
a ) kT (
h +τ = nτn + n−1τn−1 +L+ 1τ+
3.2.1 Segurador de Ordem Zero - ZOH
) kT ( x ) kT (
h +τ =
Na Figura 3.3:, observa-se o resultado de um segurador de ordem zero.
Figura 3.3: Exemplo de sinal amostrado com uma reconstrução utilizando o ZOH O ZOH mantém o sinal anterior até que um novo sinal apareça, então,
) kT ( x ) t kT (
h + =
Significando que a saída do circuito será igual à entrada até que ocorra outro sinal de entrada, então,
[
]
[
]
[
1(t 2T) 1(t 3T)]
) T 2 ( x ) t T 2 ( h 2 k
) T 2 t ( 1 ) T t ( 1 ) T ( x ) t T ( h 1 k
) T t ( 1 ) t ( 1 ) 0 ( x ) t ( h 0 k
− − − =
+ ⇒
=
− − − =
+ ⇒ =
− − =
⇒ =
Então a resposta temporal do ZOH será definida como,
[
]
[
]
[
]
∑
∞=
+ − − − =
+ − − − +
− − =
0 k
) T ) 1 k ( t ( 1 ) kT t ( 1 ) kT ( x
) T 2 t ( 1 ) T t ( 1 ) T ( x ) T t ( 1 ) t ( 1 ) 0 ( x ) t (
h L
Como a Transformada de Laplace do degrau unitário atrasada de kT é dada por,
[
]
s e ) kT t ( 1 L
kTs
−
= −
Então a Transformada de Laplace da resposta do ZOH torna-se,
( )
∑
∑
∞=
− −
∞
=
+ −
− −
= ⎥ ⎦ ⎤ ⎢
⎣ ⎡
− =
0 k
kTs Ts
0 k
Ts 1 k kTs
e ) kT ( x s
e 1 s
e s e ) kT ( x ) s ( H
Como,
∑
∞=
−
= 0 k
kTs *
e ) kT ( x )
s ( X Então,
) s ( X s e 1 ) s (
H *
Ts
−
− =
Consequentemente, a função de transferência o ZOH é dada por, s
e 1 ) s ( X
) s ( H ) s ( G
Ts
* ZOH
−
− = =
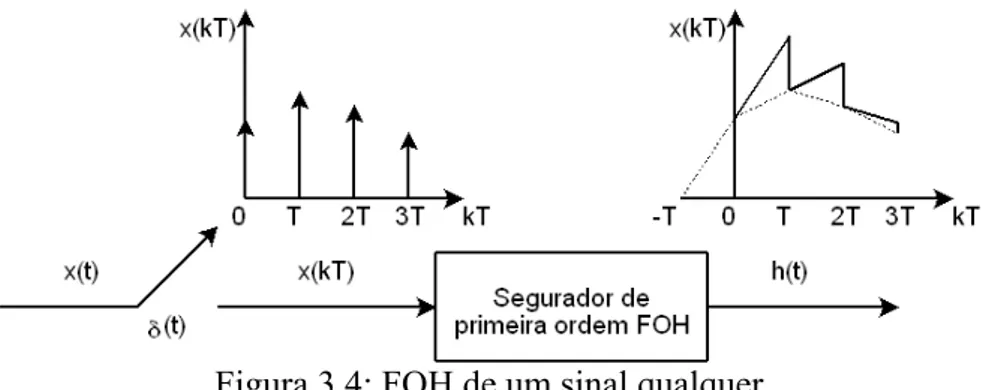
3.2.2 Segurador de primeira ordem
) kT ( x a ) kT (
h +τ = 1τ+
Aplicando a condição que,
) T ) 1 k (( x ) T ) 1 k ((
h − = −
Então, ) T ) 1 k (( x ) kT ( x T a ) T ) 1 k ((
h − = 1 + = −
Portanto, T ) T ) 1 k (( x ) kT ( x
a1 = − −
Consequentemente, a equação do segurador de primeira ordem fica, ) kT ( x T ) T ) 1 k (( x ) kT ( x ) kT (
h +τ = − − τ+
Como o FOH utiliza uma extrapolação linear utilizando o valor anterior e o atual para predizer o valor do próximo e, além disso, o valor h(kT) deve ser igual a x(kT). então, ) T ( x T ) T 2 ( x T 1 ) T 2 ( x T ) T ( x ) T 2 ( x ) T 2 ( h 2 k ) 0 ( x T ) T ( x T 1 ) T ( x T ) 0 ( x ) T ( x ) T ( h 1 k ) 0 ( x T 1 ) 0 ( x T ) T ( x ) 0 ( x ) ( h 0 k τ − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + τ = + τ − = τ + ⇒ = τ − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + τ = + τ − = τ + ⇒ = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ τ + = + τ − − = τ ⇒ =
Que pode ser expressa convenientemente como,
) T ) 1 k (( x T ) T ( x T 1 ) kT (
h ⎟ − τ −
⎠ ⎞ ⎜ ⎝ ⎛ τ + = τ +
Fica difícil escrever a equação sem assumir uma entrada conhecida, utilizando uma entrada degrau para x(t),
) T t ( 1 T t ) t ( 1 T t 1 ) t (
h ⎟ − −
⎠ ⎞ ⎜ ⎝ ⎛ + =
Somando e subtraindo 1(t-T),
) T t ( 1 ) T t ( 1 T T t ) t ( 1 T t 1 ) t (
h ⎟ − − − − −
⎠ ⎞ ⎜ ⎝ ⎛ + =
Aplicando a transformada de Laplace a cada um dos termos da equação acima,
(
Ts)
2Ts Ts 2 2 Ts 1 Ts e 1 e s 1 e Ts 1 Ts 1 s 1 ) s (
H ⎟− − = − +
⎠ ⎞ ⎜ ⎝ ⎛ + = − − −
Agora, a transformada de Laplace da entrada x*(t) do FOH é,
∑
∞ = − − − = = 0 k Ts kTs * e 1 1 e ) kT ( 1 ) s ( XEntão a função de transferência do segurador de primeira ordem FOH fica,
(
Ts)
2 2 * FOH Ts 1 Ts e 1 ) s ( X ) s ( H ) s (G = = − − +
Figura 3.4: FOH de um sinal qualquer
3.2.3 Funções de Transferência em Tempo Discreto com ZOH
Supondo que antes da função G(s) há um ZOH, então a convolução de G(s) com o ZOH é dada por,
) s ( G s e 1 ) s ( X
Ts
−
− = Fazendo,
(
)
(
1 e)
G (s) G (s) e G (s) s) s ( G e 1 ) s ( G s e 1 ) s (
X Ts Ts 1 1 Ts 1
Ts
− −
− −
− =
− = −
= −
=
Pegando apenas o último termo,
) s ( G e ) s (
X1 = −Ts 1 Aplicando o teorema da convolução,
∫
−τ τ τ = t0
1 0
1(t) g (t )g ( )d
x
onde,
[ ]
(
)
[
G (s)]
L ) t ( g
T t e
L ) t ( g
1 1 1
Ts 1 0
− − −
=
− δ = =
Então,
∫
δ − −τ τ τ = t0
1 1(t) (t T )g ( )d
x
Como o delta extrai o valor da função,
) T t ( g ) t (
x1 = 1 −
Além disso, Z[g1(t)]=G1(Z), então, por definição,
[
x (t)] [
Zg (t T)]
z G (z)Z 1 = 1 − = −1 1
Porém, o desejado é,
[
]
[
] [
]
(
)
(
)
⎥⎦⎤⎢⎣ ⎡ − = −
= −
=
− =
− =
− −
− −
s ) s ( G Z z 1 ) z ( G z 1 ) z ( G z ) z ( G
) t ( x Z ) t ( g Z ) s ( G e ) s ( G Z ) z ( X
1 1
1 1
1 1
1 1
1 Ts 1
No caso do FOH preceder a função G(s), tem-se
(
)
G(s)Ts 1 Ts e
1 ) s ( X
2 2
Ts +
−
= −
(
)
(
)
⎥⎦⎤⎢⎣ ⎡ + −
=
⎥⎦ ⎤ ⎢⎣
⎡ +
− =
− −
) s ( G Ts
1 Ts Z z 1
) s ( G Ts
1 Ts e
1 Z ) z ( X
2 2
1
2 2 Ts
Exemplo 3.1: Obter a transformada Z de, 1 s
1 s e 1 ) s ( X
Ts
+ −
= −
Solução: Como representa um ZOH,
(
)
(
)
(
)
(
TT)
111 T 1
1 1
1 Ts
z e 1
z e 1 z
e 1
1 z
1 1 z
1 1 s
1 s 1 Z z 1
1 s
1 s 1 Z z 1 1 s
1 s e 1 Z ) z ( X
− −
− − −
− −
− −
− −
− − = ⎥⎦ ⎤ ⎢⎣
⎡
− − − −
= ⎥⎦ ⎤ ⎢⎣
⎡ + − −
=
= ⎥⎦ ⎤ ⎢⎣
⎡ + −
= ⎥ ⎦ ⎤ ⎢
⎣ ⎡
+ −
=
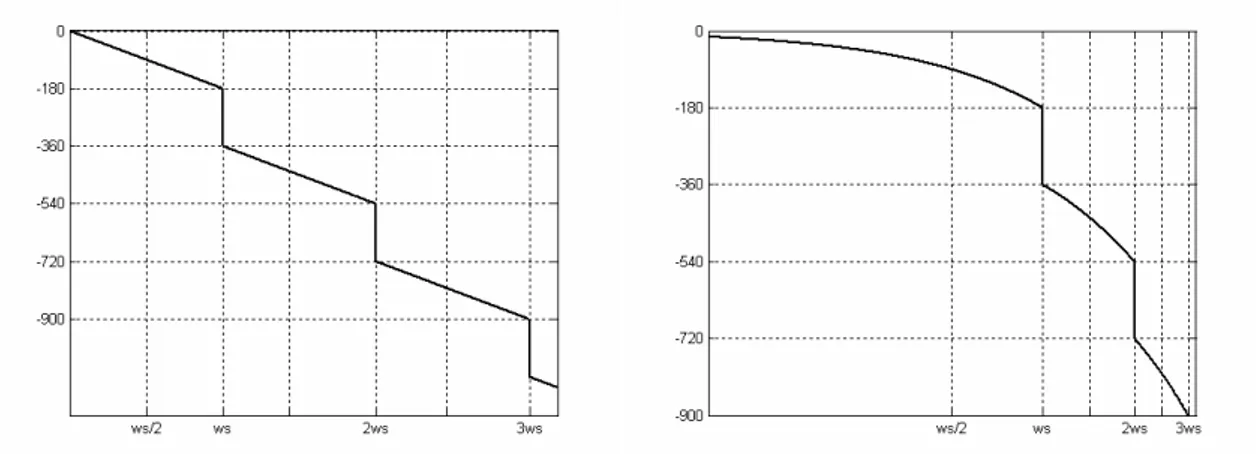
3.2.4 Resposta em Freqüência do ZOH
A função de transferência do ZOH é dada por, s e 1 G
Ts
ZOH
−
− =
A resposta em freqüência, que é o diagrama de bode, pode ser encontrada substituindo s por jω,
(
)
( )(
( ) ( ))
( )
(
( ) ( ))
(
)
2 / T
2 / T sin Te
j 2
e e
e 2
j 2
e e
e 2 j
2 e 1 2 j
e 1 ) j ( G
Tj 2 / 1 Tj
2 / 1 Tj 2 / 1 Tj 2 / 1
Tj 2 / 1 Tj 2 / 1 Tj 2 / 1 Tj
Tj
ZOH
ω ω =
ω − =
ω − =
ω − = ω − = ω
ω − ω
− ω ω
−
ω − ω ω
− ω
− ω
−
Nas figuras abaixo, ωs representa a freqüência de Nyquist, isto é a máxima freqüência que o sinal ainda pode ser reconstruído adequadamente. Caso o sinal amostrado apresente freqüências acima da freqüência de Nyquist o sinal discretizado apresentará erro de aliasing.
Figura 3.5: Resposta em freqüência do ZOH
O ZOH pode ser entendido como um filtro de reconstrução do sinal amostrado e ele não é um filtro passa-baixo ideal. Como a magnitude muda com a freqüência, atenuando o sinal a medida que a freqüência aumenta, o ZOH distorce o sinal, isto é, ele muda a amplitude e a fase do sinal de saída.
3.3 Função de Transferência Pulsada
A função de transferência, FT, pulsada é a função de transferência em Laplace envolvendo o amostrador. Supondo que um sistema cuja resposta ao impulso seja h(t) tenha a entrada x(t) e a saída seja y(t), cujas transformadas de Laplace são H(s), X(s) e Y(s) respectivamente. Pelo teorema da convolução tem-se,
( )
= =∫
(
−τ) ( )
τ τ=∫
t(
−τ) ( )
τ τ 0t
0
d h t x d x t h ) t ( x * ) t ( h t y
Que no domínio de Laplace é dada por, ) s ( X ) s ( H ) s (
Y =
Adicionando um amostrador em x(t), este é dado por,
(
)
∑
(
)
∑
∞= ∞
=
− δ =
− δ =
0 k 0
k *
kT t ) kT ( x kT
t ) t ( x ) t ( x
Aplicando esta entrada no sistema, tem-se que a resposta y(t) será a combinação de cada impulso gerado por x*(t) em h(t), sendo assim,
( )
( )
( )
( )
kT t 0 )
nT ( x ) nT t ( h
kT x ) kT t ( h T
2 x ) T 2 t ( h T x ) T t ( h 0 x ) t ( h ) t ( y
k
0 n
≤ ≤ −
=
= −
+ + −
+ −
+ =
∑
=
L
Amostrando também a saída do sistema, tem-se a Soma de Convolução dada por,
) kT ( x * ) kT ( h ) nT ( h ) nT kT ( x )
nT ( x ) nT kT ( h ) kT ( y
0 n 0
n
= −
= −
=
∑
∑
∞= ∞
=
O procedimento feito até aqui é exatamente o que ocorre na Figura 3.6. Deve-se notar que H(z) é a resposta do sistema ao delta de Kronecker, pois se,
⎩ ⎨ ⎧
≠ = =
δ =
0 k 0
[
(kT)]
x(kT)z 1 Z) z ( X
0 k
k = =
δ
=
∑
∞=
−
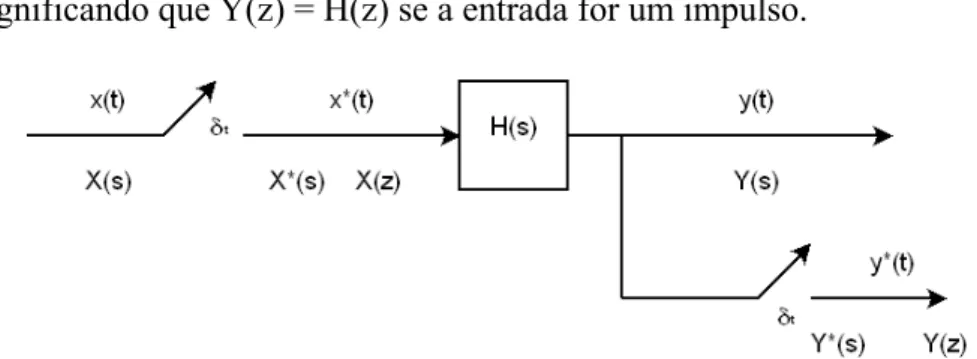
Significando que Y(z) = H(z) se a entrada for um impulso.
Figura 3.6 : Sistema em tempo contínuo com amostradores
3.3.1 Transformada de Z de FTs incluindo o amostrador
Em sistemas em tempo discreto, alguns sinais do sistema são amostrados enquanto outros continuam representados em tempo contínuo, que é exatamente o que ocorre na Figura 3.6. Sendo assim, será útil calcular a função de transferência pulsada contendo amostradores em várias posições.
Note que na Figura 3.6, a resposta do sistema, Y(s), é dada por: )
s ( X ) s ( H ) s (
Y = *
A Transformada de Laplace Inversa de Y(s) é dada por,
[
]
∑
∫
∑
∫
∞
= ∞
= −
= τ − τ δ τ τ
− =
τ τ τ − =
=
0 k t
0 k 0
t
0
* *
1
) kT ( x ) kT ( h d
) kT ( ) ( x ) t ( h
d ) ( x ) t ( h ) s ( X ) s ( H L ) t ( y
Aplicando a transformada Z,
∑ ∑
∞=
− ∞
= ⎥⎦
⎤ ⎢
⎣ ⎡ =
0 n
n
0 k
z ) kT ( x ) kT ( h )
z ( Y Fazendo m = n - k,
( )
) z ( X ) z ( H
z ) kT ( x z ) mT ( h
z ) kT ( x ) mT ( h )
z ( Y
k
0 k m
0 m
0 m
m k
0 k
= = =
− ∞
= − ∞
= ∞
=
+ − ∞
=
∑
∑
∑∑
Significando que,
[
H(s)X (s)]
H (s)X (s) )s (
Y* = * * = * *
Aplicando transformada Z, torna-se,
) z ( H ) z ( X
) z ( Y ) z ( X ) z ( H ) z (
Y = ⇒ =
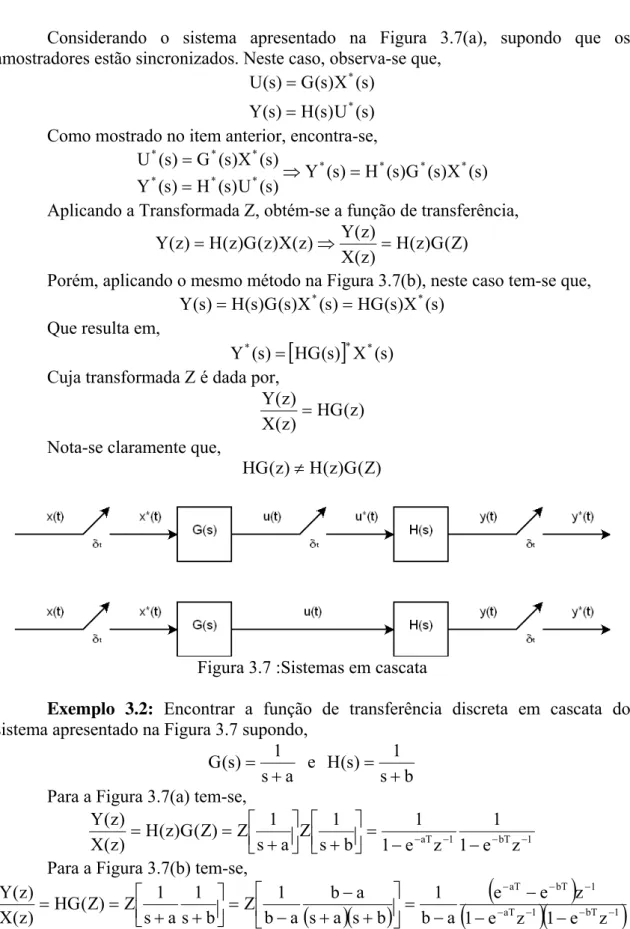
Considerando o sistema apresentado na Figura 3.7(a), supondo que os amostradores estão sincronizados. Neste caso, observa-se que,
) s ( U ) s ( H ) s ( Y
) s ( X ) s ( G ) s ( U
* *
= =
Como mostrado no item anterior, encontra-se,
) s ( X ) s ( G ) s ( H ) s ( Y ) s ( U ) s ( H ) s ( Y
) s ( X ) s ( G ) s (
U * * * *
* * *
* * *
= ⇒
= =
Aplicando a Transformada Z, obtém-se a função de transferência, )
Z ( G ) z ( H ) z ( X
) z ( Y ) z ( X ) z ( G ) z ( H ) z (
Y = ⇒ =
Porém, aplicando o mesmo método na Figura 3.7(b), neste caso tem-se que, )
s ( X ) s ( HG ) s ( X ) s ( G ) s ( H ) s (
Y = * = *
Que resulta em,
[
HG(s)]
X (s) )s (
Y* = * *
Cuja transformada Z é dada por,
) z ( HG ) z ( X
) z ( Y
=
Nota-se claramente que,
) Z ( G ) z ( H ) z (
HG ≠
Figura 3.7 :Sistemas em cascata
Exemplo 3.2: Encontrar a função de transferência discreta em cascata do sistema apresentado na Figura 3.7 supondo,
a s
1 ) s ( G
+ = e
b s
1 ) s ( H
+ = Para a Figura 3.7(a) tem-se,
1 bT 1
aT
z e 1
1 z
e 1
1 b
s 1 Z a s
1 Z ) Z ( G ) z ( H ) z ( X
) z ( Y
− − −
− −
− = ⎥⎦ ⎤ ⎢⎣ ⎡
+ ⎥⎦ ⎤ ⎢⎣ ⎡
+ = =
Para a Figura 3.7(b) tem-se,
(
)(
)
(
(
aT 1)(
)
bT 1)
1 bT aT
z e 1 z e 1
z e e a b
1 b
s a s
a b a b
1 Z b s
1 a s
1 Z ) Z ( HG ) z ( X
) z ( Y
− − −
−
− − −
− −
− −
= ⎥ ⎦ ⎤ ⎢
⎣ ⎡
+ +
− −
= ⎥⎦ ⎤ ⎢⎣
⎡
+ + = =
Este exemplo mostra claramente que ambos são diferentes.
Como mencionado anteriormente, a amostragem pode ocorrer em qualquer etapa do processo de controle. Supondo um sistema em malha fechada como o descrito na Figura 3.8.
Figura 3.8: sistema em malha fechada envolvendo amostador Consequentemente,
) s ( E ) s ( HG ) s ( R ) s ( E ) s ( G ) s ( H ) s ( R ) s (
E = − * = − *
Que pode ser reescrito utilizando FT pulsada para todos os termos como,
[
]
) s ( GH 1
) s ( R )
s ( E ) s ( E ) s ( HG ) s ( R ) s ( E
* * *
* * *
*
+ = ⇒
− =
Como,
) s ( E ) s ( G ) s (
C* = * *
Então, a função de transferência pulsada de malha fechada é dada por, ) s ( GH 1
) s ( G )
s ( R
) s ( C ) s ( GH 1
) s ( R ) s ( G ) s ( E ) s ( G ) s (
C *
*
* *
* * *
* * *
+ = ⇒
+ =
=
Aplicando a transformada Z, encontra-se a função de transferência discreta em malha fechada,
) z ( GH 1
) z ( G )
z ( R
) z ( C
+ =
3.3.4 Função de transferência em malha fechada de controladores digitais
Figura 3.9: sistema em malha fechada envolvendo amostador No caso, a função de transferência em malha fechada é dada por,
) s ( E ) s ( G ) s ( G ) s ( C ) s ( E ) s ( G ) s ( G ) s (
C * *
D * *
* *
D ⇒ =
=
Aplicando a transformada Z,
) z ( E ) z ( G ) z ( G ) z (
C = D
Como,
[
R(z) C(z)]
) z ( G ) z ( G ) z ( C ) z ( C ) z ( R ) z (
E = − ⇒ = D −
Chegando a,
) z ( G ) z ( G 1 ) z ( G ) z ( G ) z ( R ) z ( C D D + =
3.3.5 Função de transferência pulsada de um controlador PID digital
A resposta de um controlador PID no domínio do tempo é dada por, ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + +
=
∫
e(t)dt d T dt ) t ( e T 1 ) t ( e K ) t ( m d t 0 i
onde e(t) é a entrada do controlador dada pela diferença da resposta da planta e pela referência a ser seguida, K é o ganho proporcional, Ti é a constante de tempo do controle integral e Td a constante de tempo do controle proporcional.
Para se obter a função de transferência pulsada do controlador PID, é necessário realizar a discretização da resposta temporal. A integral será aproximada pela soma trapezoidal e a derivada será aproximada pela derivada da interpolação utilizando 2 pontos. Assim,
(
)
(
)
⎥⎦ ⎤ − − + ⎢ ⎣ ⎡ + ⎥⎦ ⎤ ⎢⎣ ⎡ + + + + + − + + = T T ) 1 k ( e ) kT ( e T 2 ) kT ( e T ) 1 k ( e 2 ) T 2 ( e ) T ( e 2 ) T ( e ) 0 ( e T T ) kT ( e K ) kT ( m d i LOu então,
(
)
[
(
)
]
⎭ ⎬ ⎫ ⎩ ⎨ ⎧ − − + + − + =∑
= T ) 1 k ( e ) kT ( e T T 2 ) hT ( e T ) 1 h ( e T T ) kT ( e K ) kT ( m d k 1 h iPara resolver o problema, deve-se primeiro notar que, ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − − = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡
∑
∑
− = − − = 1 i 0 h h 1 k i h z ) h ( x ) z ( X z 1 1 ) h ( x ZProva: esta transformada é comprovada fazendo,
A transformada Z de cada um dos termos utilizando a propriedade da translação real, k ) 1 i ( i z ) k ( x z ) 1 i ( x z ) i ( x ) z (
Y~ = − + + − + +L+ −
Porém, observe que, definindo,
L
L+ +
+ +
+
= −i −(i+1) −k
z ) k ( x z ) 1 i ( x z ) i ( x ) z ( X~
E da definição de transformada Z,
L + + + = = = ∞ − − = −
∑
1 20 k k z ) 2 ( x z ) 1 ( x ) 0 ( x z ) k ( x )] k ( x [ Z ) z ( X
Então, obtêm-se,
∑
−=
−
−
= i1
0 h h z ) h ( x ) z ( X ) z ( X~ Por outro lado,
) z ( X~ z 1 1 ) z ( Y~ ) z ( X~ ) z ( Y~ z ) z ( Y~ ) k ( x ) 1 k ( y ~ ) k ( y ~ 1 1 − − − = ⇒ = − ⇒ = − −
Pois a transformada Z de x(k) que começa em k = i é X~(z), finalmente, ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − − = − = = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡
∑
∑
− = − − − = 1 i 0 h h 1 1 k i h z ) h ( x ) z ( X z 1 1 ) z ( X~ z 1 1 ) z ( Y~ ) h ( x ZVoltando ao problema original utilizando o resultado acima e assumindo a causalidade, isto é, que para o tempo t = 0 não há resposta do erro,
[
]
E(z)z 1 1 ) 0 ( E ) z ( E z 1 1 ) hT ( e
Z 1 1
k 1 h − − = − = − − = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡
∑
(
)
[
]
E(z)z 1 z ) 0 ( E ) z ( E z 1 1 z ) T 1 h ( e Z 1 1 1 1 k 1 h − − − − = − = ⎭ ⎬ ⎫ ⎩ ⎨ ⎧ − − = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡
∑
−Agora, para
[
]
(
)
[
e(k 1T)]
z E(z) Z ) z ( E ) kT ( e Z 1 − = − =Então, a transformada Z do controlador PID é dada por,
[
]
⎭ ⎬ ⎫ ⎩ ⎨ ⎧ − + ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − + − + = − − −− T E(z) z E(z)
T z 1 z z 1 1 2 1 T T ) z ( E K ) z (
M d 1
1 1
1 i
Resultando em,
(
)
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − + − + + = − − − 1 d 1 1 i z 1 T T z 1 z 1 T 2 T 1 K ) z ( E ) z ( MRearranjando os termos,
(
)
(
)
⎥⎦⎤ ⎢⎣ ⎡ + − − + = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − + − + − = − − − − 1 D 1 I P 1 d 1 i i z 1 K z 1 K K z 1 T T z 1 1 T T T 2 T 1 K ) z ( E ) z ( M Onde = − = − = 2 K K T 2 KT K K I i= =
i I
T KT
K ganho integral
= =
T KT
K D
D ganho derivativo
A equação acima é referenciada como sendo a forma em posição.
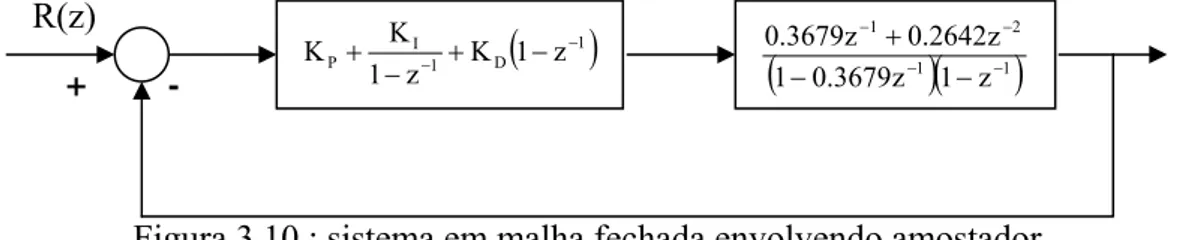
Exemplo 3.3: Comparar a resposta ao degrau do sistema abaixo considerando o sistema com e sem o controlador PID digital na forma como apresentado na Figura 3.10.
Figura 3.10 : sistema em malha fechada envolvendo amostador
Assumindo que o tempo de amostragem T é de 1 segundo, os ganhos do controlador sejam KP = 1, KI=0.2, KD = 0.2 e que a planta seja dada por,
(
s 1)
s 1 Gp
+ =
Solução: Primeiro deve-se calcular a função de transferência pulsada entre o ZOH e a planta. A convolução da planta e o ZOH é dada por,
(
s 1)
s 1 s
e 1 G G
s
p
ZOH +
−
= −
Aplicando a transformada de Z,
[
]
(
)
(
)
(
)
(
)
(
)
(
) (
[
(
) (
) (
)
)
]
1 T 2
1
1 1 T T
T 1
2 1
2 1 s
p ZOH
z e 1 z 1
z z Te e
1 e
1 T z 1 1 s s
1 Z z 1
1 s s
1 Z z 1 1 s s
1 s
e 1 Z G G Z
− − −
− − − −
− −
−
− −
− −
− − + + − −
= ⎥ ⎦ ⎤ ⎢
⎣ ⎡
+ −
=
= ⎥ ⎦ ⎤ ⎢
⎣ ⎡
+ −
= ⎥ ⎦ ⎤ ⎢
⎣ ⎡
+ −
=
Esta transformada foi obtida através de tabela de transformação. Item 13 fazendo a = 1. Para comparar com o resultado do Exemplo 2.7, deve-se lembrar que naquele ponto estava-se trabalhando com sinais, que são as respostas, e não as Funções de Transferência como tratadas aqui. No Exemplo 2.7, a resposta é convolução da FT com entrada. Agora substituindo os valores de T = 1 e simplificando, obtêm-se,
[
]
(
1)(
1)
2 1
p ZOH
z 3679 . 0 1 z 1
z 2642 . 0 z 3679 . 0 ) z ( G G G
Z − −
− −
− −
+ =
=
A função de transferência do controlador PID é dada por
(
)
(
)
1 2 1
1
2 D 1 D P
D I P
1 D 1 I P
D
z 1
z 2 . 0 z 4 . 1 4 . 1 z
1
z K z K 2 K K K K
z 1 K z 1
K K
) z ( G ) z ( E
) z ( M
− − −
−
− −
− −
− + −
= −
+ +
− + + =
= − +
− + = =
Agora a função de transferência em malha fechada é dada por,
(
1)
D 1 I
P K 1 z
z 1
K
K − + − − −
+
(
)(
)
1 1
2 1
z 1 z 3679 . 0 1
z 2642 . 0 z 3679 . 0
− −
− −
− −
+
R(z)
(
)(
)
(
)(
)
4 3
2 1
4 3
2 1
3 2
1
4 3
2 1
3 2
1
4 3
2 1
1 1
2 1
1 2 1
1 1
2 1
1 2 1
D D
z 0528 . 0 z 6642 . 0 z 5906 . 1 z 8528 . 1 1
z 0528 . 0 z 2963 . 0 z 1452 . 0 z 5151 . 0
z 3679 . 0 z 7358 . 1 z 3679 . 2 1
z 0528 . 0 z 2963 . 0 z 1452 . 0 z 5151 . 0 1
z 3679 . 0 z 7358 . 1 z 3679 . 2 1
z 0528 . 0 z 2963 . 0 z 1452 . 0 z 5151 . 0
z 3679 . 0 1 z 1
z 2642 . 0 z 3679 . 0 z
1
z 2 . 0 z 4 . 1 4 . 1 1
z 3679 . 0 1 z 1
z 2642 . 0 z 3679 . 0 z
1
z 2 . 0 z 4 . 1 4 . 1 ) z ( G ) z ( G 1
) z ( G ) z ( G ) z ( R
) z ( C
− −
− −
− −
− −
− −
−
− −
− −
− −
−
− −
− −
− −
− −
− − −
− −
− −
− − −
+ −
+ −
+ −
− =
− +
−
+ −
− +
− +
−
+ −
− =
=
− −
+ −
+ −
+
− −
+ −
+ −
= +
=
Programa em Matlab
clear all;close all;clc
% planta sem o sistema de controle discreto % significando que a simulação é tempo contínuo
num=[1]; % numerador contínuo
den=[1 1 0]; % denominador contínuo
figure('Color',[1 1 1])
step(num,den) % resposta ao degrau
% Planta controlada com PID digital
numd=[0 0.5151 -0.1452 -0.2963 0.0528]; dend=[1 -1.8528 1.5906 -0.6642 0.0528];
kT=[0:1:40]; % vetor de tempo discreto com T=1
r=ones(1,41); % criação do degrau unitário
c=filter(numd,dend,r); % simulação do sistema
figure('Color',[1 1 1]);plot(kT,c,'ko',kT,c,'k-')
title('Unit-Step Response');xlabel('kT [s]');ylabel('Output C')
(a) sem controle (b) controlado
Figura 3.11: Resposta do sistema
3.3.6 Simulação de sistemas em tempo discreto
( ) ( ) n 1 n 1 n m 1 m n 1 m n 0 n n 1 1 n m 1 m n 1 m n 0 a z a z b z b z b z a z a 1 z b z b z b ) z ( X ) z ( Y + + + + + + = + + + + + + = − − −− − + − − − −− − L L L L
n ≥ m Que também pode ser expressa na forma de pólos e zeros,
(
)(
) (
)
(
1)(
2) (
n)
m 2 1 0 p z p z p z z z z z z z b ) z ( X ) z ( Y − − − − − − = L L
n ≥ m
Observe que,
n n 1 1 m m 1 1 0 z a z a 1 z b z b b ) z ( X ) z ( Y − − − − + + + + + + = L L
Que pode ser reescrita como,
(
1+a1z−1 +L+anz−n)
Y(z)=(
b0 +b1z−1+L+bmz−m)
X(z) Aplicando a transformada inversa de Z, obtém-se,) mT kT ( x b ) T kT ( x b ) kT ( x b ) nT kT ( y a ) T 2 kT ( y a ) T kT ( y a ) kT ( y m 1 0 n 2 1 − + + − + = − + + − + − + L L
Significando que a resposta atual y(kT) é obtida fazendo, ) mT kT ( x b ) T kT ( x b ) kT ( x b ) nT kT ( y a ) T 2 kT ( y a ) T kT ( y a ) kT ( y m 1 0 n 2 1 − + + − + + + − − − − − − − = L L
Deve ser lembrado que para kT < 0 a resposta do sistema será zero, isto é y(-T) = 0 devido à condição de causalidade.
Exemplo 3.4: Calcular a resposta ao degrau unitário em tempo discreto com T = 0.5 para o sistema dado em tempo contínuo,
(
)
21 s s ) s ( G + =
Solução: Das tabelas de transformada Z,
(
)
(
)
3679 . 0 z 2131 . 1 z z 9098 . 0 z ) z ( U ) z ( Y z 3679 . 0 z 2131 . 1 1 z 9098 . 0 1 z e 1 z e ) T 1 ( 1 1 s s Z 2 2 2 1 1 2 1 T 1 T 2 + − − = + − − = − + − = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + − − − − − − −Então, o sistema a ser simulado é,
(1 – 1.2131z-1 + 0.3679z-2)Y(z) = (1 – 0.9098z-1)U(z) Aplicando a Transformada Z inversa,
y(kT) – 1.2131y((k-1)T) + 0.3679y((k-2)T) = u(kT) – 0.9098u((k-1)T) Rearranjando, ) T ) 1 k (( u 9098 . 0 ) kT ( u ) T ) 2 k (( y 3679 . 0 ) T ) 1 k (( y 2131 . 1 ) kT (
y = − − − + − −
Como x(kT)=1(kT), então, começando o processo de iteração, Para k = 0 u(kT) = u(0) = 1
y(kT) = y(0) = u(0) = 1 Para k = 1 u(kT) = u(0.5) = 1; u(0)=1
y(kT) = y(0.5) = 1.2131y(0) + u(0.5) - 0.9098u(0) = 1.2131 +1 - 0.9098 = 1.3033 Para k=2 u(kT) = u(1) = 1; u(0.5) = 1;
= 1.2131*1.3033 - 0.3679 + 1 - 0.9098 = 1.3033 Para k=3 u(kT) = u(1.5) = 1; u(1) = 1;
y(kT) = y(1.5) = 1.2131y(1.5) - 0.3679y(1) + u(1.5) - 0.9098u(1) = 1.2131*1.3033 - 0.3679*1.3033 + 1 - 0.9098 = 1.1917 Para k=4 x(kT) = u(2) = 1; u(1.5) = 1; u(1) = 1
y(kT) = y(2)=1.2131y(1.5)-0.3679y(1)+u(2)-0.9098u(1.5) = 1.2131*1.191-0.3679*1.3033+1 - 0.9098 = 1.0564 E assim por diante.
3.3.7 Realização de Controladores digitais e filtros digitais
Considerando o sistema abaixo,
n n 1
1
m m 1
1 0
z a z
a 1
z b z
b b ) z ( X
) z ( Y
− −
− −
+ + +
+ + +
=
L L
A sua representação em diagramas de bloco, ou utilizando o Simulink do Matlab, é dada na Figura 3.12, esta realização é conhecida como padrão, pois o sistema pode ser alterado para se obter outras realizações.
Figura 3.12 : Função de transferência
Exemplo 3.5: Implementar em Simulink o exemplo da Figura 3.10. Utilizando funções de transferência para o controlador e para a planta e finalmente a função de transferência de malha fechada.
Solução: a função de transferência da planta é dada por,
2 1
2 1
z 3679 . 0 z 3679 . 1 1
z 2642 . 0 z 3679 . 0 ) z (
G − −
− −
+ −
+ =
Função de transferência do controlador PID digital,
1 2 1
PID
z 1
z 2 . 0 z 4 . 1 4 . 1 ) z (
G −
− −
Para implementar esta função de transferência da planta e do controlador utiliza-se o bloco denominado “Discrete Filter”, mas poderia utiliza-ser utilizado os blocos “Discrete Transfer Fcn” ou “Discrete Zero-Pole”. A implementação do sistema está apresentada na Figura 3.13:.
Figura 3.13: Diagrama de blocos implementado em Simulink utilizando funções de transferência
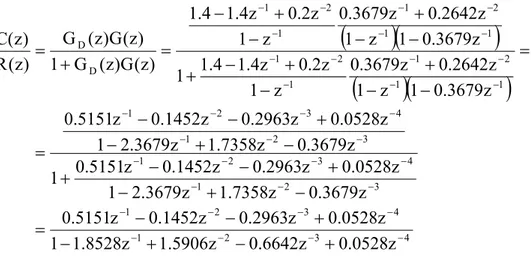
Para a implementação da função de transferência de malha fechada, optou-se pela expansão em blocos ao invés de se utilizar função de transferência, para tanto, deve-se observar que a função de transferência de malha fechada é dada por,
4 3
2 1
4 3
2 1
z 0528 . 0 z 6642 . 0 z 5906 . 1 z 8528 . 1 1
z 0528 . 0 z 2963 . 0 z 1452 . 0 z 5151 . 0 ) z ( R
) z ( C
− −
− −
− −
− −
+ −
+ −
+ −
− =
Observe que neste caso, observa-se que o termo b0 é zero, pois sua representação é,
4 4 3 3 2 2 1 1
4 3 3 3 2 2 1 1 0 MF
z a z a z a z a 1
z b z b z b z b b ) z (
G − − − −
− −
− −
+ +
+ +
+ +
+ +
=
Para este caso, a solução se encontra na Figura 3.14.
3.5 Exercícios Propostos
Exercício 3.1: Obter a transformada Z das seguintes funções de transferência, e comparar os resultados com os valores obtidos no Matlab com T = 1 e a = 3.
a)
(
s 1)(
s 2)
3 s )
s ( G
+ +
+ =
b)
(
)
2 Tsa s
1 s
e 1 ) s ( G
+ −
= −
Dica:
clear all;close all;clc
% denifindo os dados da planta
T=0.2; num=[1 3];
den=conv([1 1 ],[1 2]);
Gs=tf(num,den) % planta contínua
Gz=c2d(Gs,T) % planta discreta
Exercício 3.2: Calcular a Transformada Z do seguinte sinal,
(
)
2 st2 s
e 1 ) s ( G
+ −
= −
Exercício 3.3: Calcular a Transformada Z da seguinte função de transferência,
2 s 3 s
1 )
s ( G
2 + + =
Exercício 3.4: Calcular a resposta c(kT) para k = 0,1,2,3,4,5, rupondo que a entrada r(kT) seja um impulso e o tempo de amostragem T = 1 segundo,
(
1)
21
z 5 . 0 1
z 2 1 ) z ( R
) z ( C
− −
− + =
Exercício 3.5: Obter a função de transferência discreta em malha fechada dos seguintes diagramas de bloco,
(b)
Exercício 3.6: Calcular a função de transferência em malha fechada do seguinte diagrama de blocos,