ESCOLA SENAI "A. JACOB LAFER”
Cristiano Sant’Anna Tiago Henrique da Silva Gabriel Francisco de Santana
Matheus Rodrigues de Lima
MEDIDOR E CORTADOR DE FIO AUTOMÁTICO
ESCOLA SENAI "A. JACOB LAFER”
Cristiano Sant’Anna Tiago Henrique da Silva Gabriel Francisco de Santana
Matheus Rodrigues de Lima
MEDIDOR E CORTADOR DE FIO AUTOMÁTICO
Santo André 2015
Trabalho apresentado à Escola
SENAI “A. Jacob Lafer” como pré -requisito para obtenção do Certificado de Conclusão de Curso de Técnico em Eletroeletrônica.
Orientadores:
Prof. Carlo Toma
Escola SENAI “A. Jacob Lafer”
Cristiano Sant’Anna Tiago Henrique da Silva Gabriel Francisco de Santana
Matheus Rodrigues de Lima
Medidor e Cortador de Fio Automático
Monografia aprovada como requisito parcial para obtenção do grau de Técnico no Curso de Técnico em Eletroeletrônica, Escola SENAI “A. Jacob Lafer”, à seguinte banca examinadora:
Professor Visto
Professor Visto
Professor Visto
Professor Visto
Dedicamos este projeto a nossos familiares, amigos e a todos e a instituição SENAI “A.
AGRADECIMENTOS
RESUMO
O projeto “Medidor e cortador de fio Automático” visa a Criação de uma máquina que ajude no processo de medir e cortar o fio, assim gerando economia e tempo numa determinada situação. A máquina contém comandos simples, assim facilitando o uso de qualquer operador.
A partir do microcontrolador 8051, podemos acionar o motor DC, assim como a atuação da pinça e de uma faca através da pneumática. Para controle dos acionamentos desenvolvemos um sistema mecânico no qual pulsos são capitados através de um sensor indutivo possibilitando assim o acionamento dos relés. Neste documento apresenta todos os recursos técnicos e econômicos para desenvolvimento do projeto, assim como fotos e características dos componentes utilizados e materiais utilizados.
LISTA DE TABELAS
LISTA DE FIGURAS
Figura 1 - Apresentação física dos encapsulamentos do Microcontrolador 8051 Figura 2 - Disposição dos terminais do Microcontrolador 8051
Figura 3- Relé 5 v Figura 4 - Display LCD
Figura 5 - Botões de Comando Figura 6 - Fonte ATX
Figura 7 - MOTOR BOSCH 12 V Figura 8 - Eletroválvula
SUMÁRIO
1 - INTRODUÇÃO ... ..9
2 - OBJETIVO ... 10
3 - VIABILIDADE TÉCNICA ... 11
4 - VIABILIDADE CONÔMICA...12
5 - DESCRIÇÃO DO PROJETO ... 13
6 - PESQUISA E DETERMINAÇÃO DOS COMPONENTES UTILIZADOS ... 12
6.1.1-MICROCONTROLADOR 8051 ... 14
6.1.2-RELÉ 5V 833H-1C-C ... 16
6.1.3-DISPLAY LCDWH-1602ª-NTG-JT ... 17
6.1.4–BOTÕES ... 19
6.1.5–FONTE DE ALIMENTAÇÃO ATX ... 20
6.1.6-MOTOR DC: ... 21
6.1.7-ELETROVALVULA ... 22
6.1.7–CILINDRO DUPLA AÇÃO ... 22
7 – ESQUEMA ELÉTRICO ... 24
8 – ESQUEMA PNEUMÁTICO ... 25
9 – ESQUEMA MECÂNICO ... 26
10 – PROGRAMAÇÃO ... 27
11 - FLUXOGRAMA...66
12 - CRONOGRAMA...67
13 – ORÇAMENTO ... 68
14 - CONCLUSÃO...69
15 - REFERENCIA...70
1 - INTRODUÇÃO
10
2 - OBJETIVO
3 - VIABILIDADE TÉCNICA
Podemos concluir que nosso projeto é tecnicamente viável, pois este procedimento hoje encontra-se totalmente ultrapassado, sendo feito de forma manual, ou com auxílio de aparelhos imprecisos e que exigem esforço físico do operador. Com nosso projeto podemos afirmar que este procedimento se torna mais rápido, preciso e econômico, tendo em vista o fator homem / hora.
Para o desenvolvimento do projeto utilizaremos os conhecimentos adquiridos nas seguintes disciplinas:
● Desenvolvimento de sistemas Eletrônicos – DSET ● Manutenção de sistemas eletroeletrônicos – MSEL ● Instalação de sistemas elétricos industriais– ISEI
12
4 - VIABILIDADE ECONÔMICA
O custo total do projeto é de aproximadamente de R$ 845,00. Visando a saúde e o tempo adquirido com o processo de medição e enrolamento automático, o valor se torna viável.
Por exemplo, em uma instalação elétrica de médio e grande porte a utilização dessa máquina seria muito viável para economia do tempo no trabalho que contribuiria em cumprir em prazo determinado cronogramas, pois, o serviço ficaria com um tempo maior de execução com uma medição manual.
5 - DESCRIÇÃO DO PROJETO
O projeto consiste na automatização do Cortador de fio, hoje totalmente mecânico. Será desenvolvido pelo grupo um equipamento que estará efetuando os procedimentos necessários para seu funcionamento: medição, controle e atuação, através de Microcontrolador 8051 (Controlador de Interface Programável), sensores e atuadores.
Primeiramente, o usuário coloca o rolo de fio no desbobinador, passa a ponta do cabo entre os guias, e prende na segunda parte da desbobinadeira. Logo em seguida, digita no teclado numérico a quantidade em metros necessária para executar o trabalho.
14
.6 - PESQUISA E DETERMINAÇÃO DOS COMPONENTES UTILIZADOS Descrição e características dos componentes utilizados em nosso projeto, com dados e figuras
6.1.1 - Microcontrolador 8051:
Os microcontroladores são componentes que tem, num único chip, além de uma CPU, elementos tais como memórias ROM e RAM, temporizadores/contadores, PWM, conversor AD, canais de comunicação e conversores analógicos-digitais.
Existem no mercado muitos tipos de microcontroladores sendo o 8051, lançado no início da década de 80, o mais popular.
O seu sucesso se dá devido a vários motivos, como: Baixo custo;
Facilidade de uso e versatilidade; Rápido e eficaz;
Vários fabricantes;
Pode ser programado em Assembly ou C.
Figura 1 Apresentação física dos encapsulamentos do Microcontrolador 8051
Principais características:
Entradas de interrupção externa; Quatro ports de I\O;
RAM interna de uso geral de 128 bytes e 128 bytes correspondentes aos registradores especiais;
ROM interno de 4Kbytes; Dois timers de 16 bits; Uma interface serial;
Capacidade de 64 Kbytes de endereçamento externo de RAM; Capacidade de 64 Kbytes de endereçamento externo de ROM; Processador booleano (opera com bits);
Ciclos típicos de instrução de 1 e 2 µs a 12 MHz; Instrução direta de divisão e multiplicação.
As características citadas são básicas e formam o núcleo da família 8051, que pode ser acrescido de uma ou mais das características especiais.
16
6.1.2 - Relé 5v 833H-1C-C:
O relé tem como finalidade no projeto, atuar como chave. O microcontrolador envia uma corrente que circula pela bobina, esta cria um campo magnético que atrai um ou uma série de contatos fechando ou abrindo circuitos.
Uma das vantagens de se trabalhar com relé é que o circuito de carga está completamente isolado do de controle, podendo inclusive trabalhar com tensões diferentes entre controle e carga. Ao cessar a corrente da bobina o campo magnético também cessa, fazendo com que os contatos voltem para a posição original. Os relés podem ter diversas configurações quanto aos seus contatos: podem ter contatos NA, NF ou ambos, neste caso com um contato comum ou central (C). Os contatos NA (normalmente aberto) são os que estão abertos enquanto a bobina não está energizada e que fecham, quando a bobina recebe corrente.
Os NF (normalmente fechado) abrem-se quando a bobina recebe corrente, ao contrário dos NA. O contato central ou C é o comum, ou seja, quando o contato NA fecha é com o C que se estabelece a condução e o contrário com o NF.A sua tensão de operação é de 5VDC - 20~40mA acionando um contato que suporta até 10A para tesões contínuas de até 30VDC ou 10A para tensões alternadas de até 250VCA.
Características:
- Tensão da bobina: 5VDC
- Corrente típica de operação: 50~72mA
possui 3 terminais proporcionando 1 contato NA, 1 NF e o Comum Contato do relé permite tensão de até 250 VDC a 7A ou 277VAC a 10A - Dimensões: 15mm x 15.5mm x 19mm
- Tamanho do terminal: 3.5mm
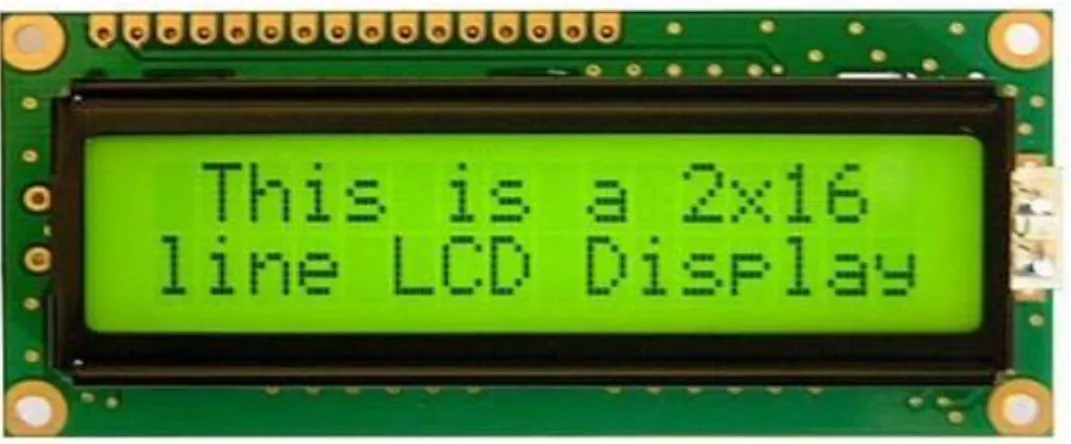
6.1.3 - Display LCD WH-1602ª-NTG-JT
Figura 4 Display LCD
Os LCDs alfanuméricos seguem um padrão de especificação de interface, onde estão presentes 14 pinos de acesso (Para os LCDs sem iluminação em back-light) ou 16 pinos (para os que possuem iluminação em back-light para facilitar as leituras durante a noite).
Estes módulos utilizam um microcontrolador próprio, permitindo sua interligação com outras placas através de seus pinos. A função de cada pino é resumida de acordo com a tabela abaixo:
Tabela 1 – Pinagem do Display LCD Alfanumérico.
Pinos Nome Função
1 Vss Terra
2 Vdd Positivo (Normalmente 5V) 3 V0 ou Vee Contraste do LCD
4 RS Register Select 5 R/W Read/Write
6 E Enable
18
7 D0 Bit 0 do dado a ser escrito no LCD (ou lido nele) 8 D1 Bit 1 do dado a ser escrito no LCD (ou lido nele) 9 D2 Bit 2 do dado a ser escrito no LCD (ou lido nele) 10 D3 Bit 3 do dado a ser escrito no LCD (ou lido nele) 11 D4 Bit 4 do dado a ser escrito no LCD (ou lido nele) 12 D5 Bit 5 do dado a ser escrito no LCD (ou lido nele) 13 D6 Bit 6 do dado a ser escrito no LCD (ou lido nele) 14 D7 Bit 7 do dado a ser escrito no LCD (ou lido nele) 15 A Anodo do Back- Light
16 K Catodo do Back-Light
6.1.4 – Botões
Os botões são responsáveis pelo controle da máquina, pois com ele será especificado o tamanho de fio desejado e assim irá iniciar o processo.
Figura 5 Botões de Comando
20
6.1.5 – Fonte de alimentação Atx
Usamos uma fonte de alimentação de computador, ela fornece todas as tensões que precisamos para o funcionamento do projeto com uma corrente consideravelmente alta.
Ela nos fornece as seguintes tensões: +3,3 V, +5 V, +12 V, +24V, -5 V e -12 V. Usamos +5 V para o microcontrolador, 12 V para o motor e +24 V para as solenóides.
Figura 6 Fonte ATX
6.1.6 - Motor DC:
Um Motor elétrico é uma máquina destinada a transformar energia elétrica em mecânica.
Os motores de corrente contínua (CC) ou motores DC (Direct Current), como também são chamados, são dispositivos que operam aproveitando as forças de atração e repulsão geradas por eletroímãs e imãs permanentes. Conforme sabemos, se fizermos passar correntes elétricas por duas bobinas próximas, os campos magnéticos criados poderão fazer com que surjam forças de atração ou repulsão. A ideia básica de um motor é montar uma bobina entre os pólos de um imã permanente ou então de uma bobina fixa que funcione como tal, partindo então da posição inicial, em que os pólos da bobina móvel (rotor), ao ser percorrida por uma corrente, estão alinhados com o imã permanente temos a manifestação de uma força de repulsão. Esta força de repulsão faz o conjunto móvel mudar de posição, conforme mostra a figura.
Figura 7 MOTOR BOSCH 12 V
22
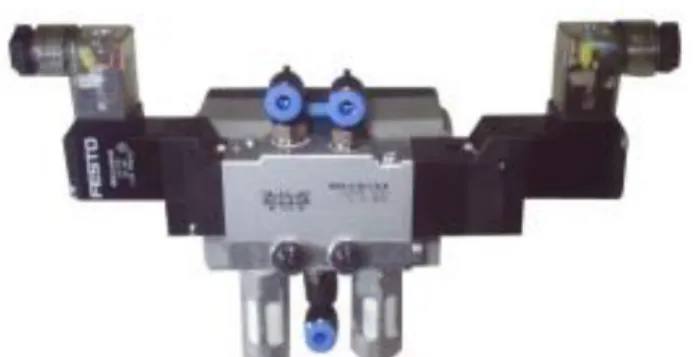
6.1.7 – Eletroválvula
A eletroválvula pneumática é um produto utilizado para distribuir ar aos elementos de trabalho e são tão versáteis que podem, até mesmo, ser utilizadas para emitir e receber sinais das válvulas principais e também para tratamento de sinais, mas, é importante lembrar que para que ela realize essas outras funções, é preciso que a mesma seja utilizada em menor tamanho. As eletroválvulas, no geral, funcionam através de sinais elétricos, que movimentam um núcleo que pode barrar ou não a passagem do fluido.
A eletroválvula pneumática pode possuir até cinco vias direcionais e cada uma possui uma função. As válvulas com duas vias realizam somente a passagem do fluxo, pois possuem uma abertura de entrada e uma de saída. Válvulas com três vias alimentam o circuito e permitem que a descarga ocorra. As válvulas com quatro vias, um serve para alimentação, dois servem para utilizar normalmente e um serve como escape, para ambas as utilizações. Já as válvulas com cinco vias permitem, entre outras coisas, controlar a velocidade, e o retorno de um cilindro.
Figura 8 Eletroválvula
6.1.8 – Cilindro de dupla ação
O cilindro pneumático é o elemento usado para transformar a energia do ar
comprimido em movimento linear. É o responsável, dentro de indústrias e outras instalações, por pelo menos uma das três operações básicas: movimentar, prender ou formar alguma peça.
Ele se movimenta (avançando ou retornando o conjunto haste-pistão) através do ar comprimido que é injetado em suas câmaras traseira ou dianteira, por meio de válvulas direcionais ou elementos controladores.
A força exercida pelo cilindro pneumático é produto de sua área (calculada pelo diâmetro interno) pela pressão de trabalho.
Figura 9 cilindro pneumático dupla ação
24 7 – E S QUE M A E LÉT RICO XTAL2 18 XTAL1 19 ALE 30 EA 31 PSEN 29 RST 9 P0.0/AD0 39 P0.1/AD1 38 P0.2/AD2 37 P0.3/AD3 36 P0.4/AD4 35 P0.5/AD5 34 P0.6/AD6 33 P0.7/AD7 32 P2.7/A15 28 P2.0/A8 21 P2.1/A9 22 P2.2/A10 23 P2.3/A11 24 P2.4/A12 25 P2.5/A13 26 P2.6/A14 27 P1.0 1 P1.1 2 P1.2 3 P1.3 4 P1.4 5 P1.5 6 P1.6 7 P1.7 8 P3.0/RXD 10 P3.1/TXD 11 P3.2/INT0 12 P3.3/INT1 13 P3.4/T0 14 P3.7/RD 17 P3.6/WRP3.5/T1 16 15 U1 80C51 X1 CRYSTAL C1 1u C2 1u D 7 14 D 6 13 D 5 12 D 4 11 D 3 10 D 2 9 D 1 8 D 0 7 E 6 R W 5 R S 4 V S S 1 V D D 2 V E E 3 LM016L VCC VCC R1
10k R510k R610k R710k
DIGITAR +++ INICIAR ---MOTOR 12V VCC R3 330 R4 330 RL2 5V Q3 BC327 D0 D1 D2 D3 D4 D5 D6 D7 D 7 D 3 D 5 D 4 D 1 D 0 D 6 D 2 EN RW RS R S R W E P3.2 P3.3 P3.4 P3.5 R9
1k VC
C P 1. 5 VCC P3.4 P3.3 P3.2 P3.0 P3.5 P1.5 P1.6 P1.7 V C C RL3 5V Q1 BC327 R8 1k V C C P 1. 6 VCC VCC RL1 5V Q2 BC327 R10
1k VC
26
10 – PROGRAMAÇÃO
RS EQU P2.7
RW EQU P2.1 EN EQU P2.6
MOV P3, #0FFH
ORG 0000H
JMP MSGINICIAL
ORG 0040H
;---
;---DISPLAY LCD--- ;---
MSGINICIAL:
CALL DELAY2m CALL INICIALCD MOV A,#080H CALL COMANDO
MOV DPTR,#MENSAGEM11 CALL ESCREVE
28
MOV DPTR,#MENSAGEM12 CALL ESCREVE
MOV A,#00H CALL DELAY3 CALL INICIALCD MOV A,#080H CALL COMANDO
MOV DPTR,#MENSAGEM13 CALL ESCREVE
MOV A,#00H CALL DELAY3 CALL INICIALCD MOV A,#080H CALL COMANDO
MOV DPTR,#MENSAGEM14 CALL ESCREVE
MOV A,#00H MOV A,#0C0H CALL COMANDO
MOV DPTR,#MENSAGEM15 CALL ESCREVE
MOV DPTR,#MENSAGEM1503 CALL ESCREVE
MOV A,#00H MOV A,#0C0H CALL COMANDO
MOV DPTR,#MENSAGEM1504 CALL ESCREVE
MOV A,#00H CALL DELAY3 CALL INICIALCD MOV A,#080H CALL COMANDO
MOV DPTR,#MENSAGEM1505 CALL ESCREVE
MOV A,#00H CALL DELAY3 CALL INICIALCD MOV A,#080H CALL COMANDO
MOV DPTR,#MENSAGEM1506 CALL ESCREVE
MOV A,#00H MOV A,#0C0H CALL COMANDO
30
MOV A,#00H CALL DELAY3 CALL INICIALCD MOV A,#080H CALL COMANDO
MOV DPTR,#MENSAGEM1501 CALL ESCREVE
MOV A,#00H MOV A,#0C0H CALL COMANDO
MOV DPTR,#MENSAGEM1502 CALL ESCREVE
MOV A,#00H CALL DELAY3 CALL INICIALCD MOV A,#080H CALL COMANDO
MOV DPTR,#MENSAGEM16 CALL ESCREVE
MOV A,#00H MOV A,#0C0H CALL COMANDO
MOV DPTR,#MENSAGEM17 CALL ESCREVE
CALL INICIALCD MOV A,#080H CALL COMANDO
MOV DPTR,#MENSAGEM18 CALL ESCREVE
MOV A,#00H MOV A,#0C0H CALL COMANDO
MOV DPTR,#MENSAGEM1801 CALL ESCREVE
MOV A,#00H CALL DELAY3 CALL INICIALCD MOV A,#080H CALL COMANDO
MOV DPTR,#MENSAGEM19 CALL ESCREVE
MOV A,#00H MOV A,#0C0H CALL COMANDO
MOV DPTR,#MENSAGEM1901 CALL ESCREVE
32
CALL COMANDO
MOV DPTR,#MENSAGEM1902 CALL ESCREVE
MOV A,#00H MOV A,#0C0H CALL COMANDO
MOV DPTR,#MENSAGEM1903 CALL ESCREVE
MOV A,#00H CALL DELAY3
INICIO:
CALL DELAY2m CALL INICIALCD MOV A,#080H CALL COMANDO
MOV DPTR,#MENSAGEM1 CALL ESCREVE
JMP ESCOLHA
MSG2:
CALL INICIALCD MOV A,#080H CALL COMANDO
CALL ESCREVE MOV A,#00H MOV A,#0C0H CALL COMANDO
MOV DPTR,#MENSAGEM21 CALL ESCREVE
MOV A,#00H JMP DIGIT MSG3:
CALL INICIALCD MOV A,#080H CALL COMANDO
MOV DPTR,#MENSAGEM3 CALL ESCREVE
MOV A,#00H MOV A,#0C0H CALL COMANDO
MOV DPTR,#MENSAGEM31 CALL ESCREVE
MOV A,#00H JMP ROLL MSG4:
CALL INICIALCD MOV A,#080H CALL COMANDO
34
CALL ESCREVE MOV A,#02H JMP OFF2
MSG5:
CALL INICIALCD MOV A,#080H CALL COMANDO
MOV DPTR,#MENSAGEM5 CALL ESCREVE
MOV A,#00H MOV A,#0C0H CALL COMANDO
MOV DPTR,#MENSAGEM51 CALL ESCREVE
MOV A,#00H JMP SCROLL
MSG6:
CALL INICIALCD MOV A,#080H CALL COMANDO
MOV DPTR,#MENSAGEM6 CALL ESCREVE
JMP INICIO
MSG71:
CALL INICIALCD MOV A,#080H CALL COMANDO
MOV DPTR,#MENSAGEM2 CALL ESCREVE
MOV A,#00H MOV A,#0C0H CALL COMANDO
MOV DPTR,#MENSAGEM71 CALL ESCREVE
MOV A,#0AH
JMP REG0SUB ; PULA PARA LABEL REG0SUB
MSG72:
CALL INICIALCD MOV A,#080H CALL COMANDO
MOV DPTR,#MENSAGEM2 CALL ESCREVE
MOV A,#00H MOV A,#0C0H CALL COMANDO
36
CALL ESCREVE MOV A,#14H
JMP REG0SOM ; PULA PARA LABEL REG0SOM
MSG73:
CALL INICIALCD MOV A,#080H CALL COMANDO
MOV DPTR,#MENSAGEM2 CALL ESCREVE
MOV A,#00H MOV A,#0C0H CALL COMANDO
MOV DPTR,#MENSAGEM73 CALL ESCREVE
MOV A,#1EH JMP REG0SUB
MSG74:
CALL INICIALCD MOV A,#080H CALL COMANDO
MOV DPTR,#MENSAGEM2 CALL ESCREVE
CALL COMANDO
MOV DPTR,#MENSAGEM74 CALL ESCREVE
MOV A,#28H JMP REG0SOM
MSG75:
CALL INICIALCD MOV A,#080H CALL COMANDO
MOV DPTR,#MENSAGEM2 CALL ESCREVE
MOV A,#00H MOV A,#0C0H CALL COMANDO
MOV DPTR,#MENSAGEM75 CALL ESCREVE
MOV A,#32H JMP REG0SUB
MSG76:
CALL INICIALCD MOV A,#080H CALL COMANDO
38
MOV A,#00H MOV A,#0C0H CALL COMANDO
MOV DPTR,#MENSAGEM76 CALL ESCREVE
MOV A,#3CH JMP REG0SOM
MSG77:
CALL INICIALCD MOV A,#080H CALL COMANDO
MOV DPTR,#MENSAGEM2 CALL ESCREVE
MOV A,#00H MOV A,#0C0H CALL COMANDO
MOV DPTR,#MENSAGEM77 CALL ESCREVE
MOV A,#46H JMP REG0SUB
MSG78:
MOV DPTR,#MENSAGEM2 CALL ESCREVE
MOV A,#00H MOV A,#0C0H CALL COMANDO
MOV DPTR,#MENSAGEM78 CALL ESCREVE
MOV A,#50H JMP REG0SOM
MSG79:
CALL INICIALCD MOV A,#080H CALL COMANDO
MOV DPTR,#MENSAGEM2 CALL ESCREVE
MOV A,#00H MOV A,#0C0H CALL COMANDO
MOV DPTR,#MENSAGEM79 CALL ESCREVE
MOV A,#5AH JMP REG0SUB
MSG80:
40
MOV A,#080H CALL COMANDO
MOV DPTR,#MENSAGEM2 CALL ESCREVE
MOV A,#00H MOV A,#0C0H CALL COMANDO
MOV DPTR,#MENSAGEM80 CALL ESCREVE
MOV A,#64H JMP REG0SOM
MSG81:
CALL INICIALCD MOV A,#080H CALL COMANDO
MOV DPTR,#MENSAGEM2 CALL ESCREVE
MOV A,#00H MOV A,#0C0H CALL COMANDO
MOV DPTR,#MENSAGEM81 CALL ESCREVE
MSG82:
CALL INICIALCD MOV A,#080H CALL COMANDO
MOV DPTR,#MENSAGEM2 CALL ESCREVE
MOV A,#00H MOV A,#0C0H CALL COMANDO
MOV DPTR,#MENSAGEM82 CALL ESCREVE
MOV A,#78H JMP REG0SOM
MSG83:
CALL INICIALCD MOV A,#080H CALL COMANDO
MOV DPTR,#MENSAGEM2 CALL ESCREVE
MOV A,#00H MOV A,#0C0H CALL COMANDO
MOV DPTR,#MENSAGEM83 CALL ESCREVE
42
JMP REG0SUB
MSG84:
CALL INICIALCD MOV A,#080H CALL COMANDO
MOV DPTR,#MENSAGEM2 CALL ESCREVE
MOV A,#00H MOV A,#0C0H CALL COMANDO
MOV DPTR,#MENSAGEM84 CALL ESCREVE
MOV A,#8CH JMP REG0SOM
MSG85:
CALL INICIALCD MOV A,#080H CALL COMANDO
MOV DPTR,#MENSAGEM2 CALL ESCREVE
MOV A,#00H MOV A,#0C0H CALL COMANDO
CALL ESCREVE MOV A,#096H JMP REG0SUB
MSG86:
CALL INICIALCD MOV A,#080H CALL COMANDO
MOV DPTR,#MENSAGEM2 CALL ESCREVE
MOV A,#00H MOV A,#0C0H CALL COMANDO
MOV DPTR,#MENSAGEM86 CALL ESCREVE
MOV A,#0A0H JMP REG0SOM
MSG87:
CALL INICIALCD MOV A,#080H CALL COMANDO
MOV DPTR,#MENSAGEM2 CALL ESCREVE
44
CALL COMANDO
MOV DPTR,#MENSAGEM87 CALL ESCREVE
MOV A,#0AAH JMP REG0SUB
MSG88:
CALL INICIALCD MOV A,#080H CALL COMANDO
MOV DPTR,#MENSAGEM2 CALL ESCREVE
MOV A,#00H MOV A,#0C0H CALL COMANDO
MOV DPTR,#MENSAGEM88 CALL ESCREVE
MOV A,#0B4H JMP REG0SOM
MSG89:
CALL INICIALCD MOV A,#080H CALL COMANDO
MOV A,#00H MOV A,#0C0H CALL COMANDO
MOV DPTR,#MENSAGEM89 CALL ESCREVE
MOV A,#0BEH JMP REG0SUB
MSG90:
CALL INICIALCD MOV A,#080H CALL COMANDO
MOV DPTR,#MENSAGEM2 CALL ESCREVE
MOV A,#00H MOV A,#0C0H CALL COMANDO
MOV DPTR,#MENSAGEM90 CALL ESCREVE
MOV A,#0C8H JMP REG0SOM
46
CLR RW
VOLTA:
INC DPTR MOV A,#00H MOVC A,@A+DPTR CJNE A,#'%',FIM RET
FIM:
CALL ENVIA JMP VOLTA
COMANDO: CLR RS
CLR RW
CALL ENVIA RET
INICIALCD: CLR RS
CLR RW
CLR EN MOV P0,#00H
CALL ENVIA
MOV A,#038H CALL ENVIA
MOV A,#06H CALL ENVIA
MOV A,#0CH CALL ENVIA
CALL LIMPADISPLAY RET
LIMPADISPLAY: MOV A,#01H CALL ENVIA RET
ENVIA:
SETB EN MOV P0,A CLR EN
CALL DELAY2m RET
48
MOV R6,#10
LOOP1: MOV R1,#200 LOOP:
DJNZ R1,LOOP DJNZ R6,LOOP1 RET
;---
;---MENSAGENS DO LCD--- ;---
MENSAGEM1:
DB ' APERTE DIGITAR %'
MENSAGEM11:
DB ' SENAI A JACOB % '
MENSAGEM12: DB ' LAFER % '
MENSAGEM13:
DB ' TURMA 4NA % '
MENSAGEM14:
DB ' CORTADOR DE FIOS % '
DB ' AUTOMATICO % '
MENSAGEM1503:
DB ' PROFESSORES % '
MENSAGEM1504:
DB ' ORIENTADORES % '
MENSAGEM1505:
DB ' CARLO TOMA % '
MENSAGEM1506: DB ' GLEYDSON % '
MENSAGEM1507:
DB ' MONTEIRO % ' MENSAGEM1501:
DB ' INTEGRANTES DO % '
MENSAGEM1502: DB ' GRUPO % '
MENSAGEM16:
DB ' CRISTIANO % '
50
DB ' SANT ANNA % '
MENSAGEM18:
DB ' GABRIEL F % '
MENSAGEM1801: DB ' SANTANA % '
MENSAGEM19: DB ' MATHEUS % '
MENSAGEM1901: DB ' RODRIGUES % '
MENSAGEM1902:
DB ' TIAGO HENRIQUE % '
MENSAGEM1903: DB ' DA SILVA % '
MENSAGEM2:
DB ' COMPRIMENTO %'
MENSAGEM3:
DB ' MAQUINA EM % '
MENSAGEM31:
DB ' OPERACAO % '
MENSAGEM4:
DB ' ETAPA DE CORTE % '
MENSAGEM5:
DB ' ENROLANDO FIOS % '
MENSAGEM51: DB ' DA MESA % '
MENSAGEM6:
DB ' FINALIZADO % '
MENSAGEM71: DB ' 10 CM % '
MENSAGEM72: DB ' 20 CM % '
52
MENSAGEM74: DB ' 40 CM % '
MENSAGEM75: DB ' 50 CM % '
MENSAGEM76: DB ' 60 CM % '
MENSAGEM77: DB ' 70 CM % '
MENSAGEM78: DB ' 80 CM % '
MENSAGEM79: DB ' 90 CM % '
MENSAGEM80: DB ' 1 Mt % '
MENSAGEM81: DB ' 1,10 Mt % '
DB ' 1,20 Mt % '
MENSAGEM83: DB ' 1,30 Mt % '
MENSAGEM84: DB ' 1,40 Mt % '
MENSAGEM85: DB ' 1,50 Mt % '
MENSAGEM86: DB ' 1,60 Mt % '
MENSAGEM87:
DB ' 1,70 Mt % '
MENSAGEM88: DB ' 1,80 Mt % '
MENSAGEM89: DB ' 1,90 Mt % '
54
MENSAGEM91: DB ' 2,10 Mt % '
MENSAGEM92: DB ' 2,20 Mt % '
MENSAGEM93: DB ' 2,30 Mt % '
MENSAGEM94: DB ' 2,40 Mt % '
MENSAGEM95: DB ' 2,50 Mt % '
MENSAGEM96: DB ' 2,60 Mt % '
MENSAGEM97: DB ' 2,70 Mt % '
MENSAGEM98: DB ' 2,80 Mt % '
MENSAGEM100: DB ' 3 Mt % '
MENSAGEM101: DB ' 3,10 Mt % '
MENSAGEM102: DB ' 3,20 Mt % '
MENSAGEM103: DB ' 3,30 Mt % '
MENSAGEM104: DB ' 3,40 Mt % '
MENSAGEM105: DB ' 3,50 Mt % '
MENSAGEM106: DB ' 3,60 Mt % '
MENSAGEM107: DB ' 3,70 Mt % '
56
DB ' 3,80 Mt % '
MENSAGEM109: DB ' 3,90Mt % '
MENSAGEM110:
DB ' 4 Mt % '
;---
;---ETAPA DE SELEÇÃO DA QUANTIDADE DE FIOS--- ;---
ROTFI:
JMP ESCOLHA ; PULA PARA LABEL ESCOLHA CONGRA:
JMP MSG6 ; ESCREVE NO DISPLAY FINALIZADO OBRIGADO
ESCOLHA:
JNB P3.2,M1 ; AGUARDA PULSO EM 3.2 PARA PARTIR PARA LABEL M1
JMP ESCOLHA ; LOOP PARA ESCOLHA
M1: JMP MSG2 ; ESCREVER NO LCD A MENSAGEM ' COMPRIMENTO 0 CM'
DIGIT:
JNB P3.4,DIM ; AGUARDA PULSO EM P3.4 PARA DIMINUIR EM 10 CM O COMPRIMENTO DO FIO
JNB P3.5,LIBERAR ; AGUARDA PULSO EM P3.5 PARA CONCLUIR O COMPRIMENTO DESEJADO DE FIO
JMP DIGIT ; LOOP PARA PROSSEGUIR VARREDURA DOS BOTOES
VLATTSM:
ADD A,R5 ; SOMA O VALOR DO ACC COM R5 JMP CONTALCD ; PULA PARA LABEL CONTALCD REG0SOM:
MOV R5,#00H ; LIMPA R5
JMP DIGIT ; PULA PARA VARREDURA DOS BOTOES VLATTSB:
SUBB A,R5 ; SUBTRAI O VALOR DE ACC POR REGISTRADOR R5 JMP CONTALCD ; PULA PARA LABEL CONTA LCD
REG0SUB:
MOV R5,#00H ; LIMPA R5
JMP DIGIT ; PULA PARA VARREDURA DOS BOTÕES AUM:
CALL DELAYC ; CHAMA ROTINA DE TEMPO
MOV R5,#14H ; MOVE 14 HEXA PARA REGISTRADOR R5 JMP VLATTSM ; PULA PARA LABEL VLATTSM
DIM:
CALL DELAYC ; CHAMA ROTINA DE TEMPO MOV R5,#0AH ; MOVE A HEXA PARA R5
58
JMP DIGIT ; CHEGA NESSA LINHA SE O VALOR DE ACC FOR 0 ENTÃO RETORNA PARA VARREDURA DE BOTÕES
LIBERAR:
CJNE A,#00H,CONC ; COMPARA O VALOR DE ACC COM 0, SE NÃO FOR LIBERA O BOTÃO OK
JMP DIGIT ; LOOP PARA ROTINA DE VARREDURA DOS BOTÕES
CONC:
JMP NOVO ; PULA PARA LABEL NOVO
;---
;---COMPRIMENTO LCD--- ;---
CONTALCD:
LCD10: CJNE A,#0AH,LCD20 ; COMPARAÇÃO PARA ENVIO DE MENSAGEM PARA LCD
JMP MSG71 ; CHAMA MENSAGEM 71 PARA MOSTRAR 10 CM
LCD20: CJNE A,#14H,LCD30 ; COMPARAÇÃO PARA ENVIO DE MENSAGEM PARA LCD
JMP MSG72 ; CHAMA MENSAGEM 72 PARA MOSTRAR 20 CM
JMP MSG73 ; CHAMA MENSAGEM PARA MOSTRAR 30 CM
LCD40: CJNE A,#28H,LCD50 ; COMPARAÇÃO PARA ENVIO DE MENSAGEM PARA LCD
JMP MSG74 ; CHAMA MENSAGEM PARA MOSTRAR 40 CM
LCD50: CJNE A,#32H,LCD60 ; COMPARAÇÃO PARA ENVIO DE MENSAGEM PARA LCD
JMP MSG75 ; CHAMA MENSAGEM PARA MOSTRAR 50 CM
LCD60: CJNE A,#3CH,LCD70 ; COMPARAÇÃO PARA ENVIO DE MENSAGEM PARA LCD
JMP MSG76 ; CHAMA MENSAGEM PARA MOSTRAR 60 CM
LCD70: CJNE A,#46H,LCD80 ; COMPARAÇÃO PARA ENVIO DE MENSAGEM PARA LCD
JMP MSG77 ; CHAMA MENSAGEM PARA MOSTRAR 70 CM
LCD80: CJNE A,#50H,LCD90 ; COMPARAÇÃO PARA ENVIO DE MENSAGEM PARA LCD
JMP MSG78 ; CHAMA MENSAGEM PARA MOSTRAR 80 CM
LCD90: CJNE A,#05AH,LCD100 ; COMPARAÇÃO PARA ENVIO DE MENSAGEM PARA LCD
JMP MSG79 ; CHAMA MENSAGEM PARA MOSTRAR 90 CM
LCD100: CJNE A,#064H,LCD110 ; COMPARAÇÃO PARA ENVIO DE MENSAGEM PARA LCD
60
LCD110: CJNE A,#06EH,LCD120 ; COMPARAÇÃO PARA ENVIO DE MENSAGEM PARA LCD
JMP MSG81 ; CHAMA MENSAGEM PARA MOSTRAR 1 METRO E 10 CM
LCD120: CJNE A,#078H,LCD130 ; COMPARAÇÃO PARA ENVIO DE MENSAGEM PARA LCD
JMP MSG82 ; CHAMA MENSAGEM PARA MOSTRAR 1 METRO E 20 CM
LCD130: CJNE A,#082H,LCD140 ; COMPARAÇÃO PARA ENVIO DE MENSAGEM PARA LCD
JMP MSG83 ; CHAMA MENSAGEM PARA MOSTRAR 1 METRO E 30 CM
LCD140: CJNE A,#08CH,LCD150 ; COMPARAÇÃO PARA ENVIO DE MENSAGEM PARA LCD
JMP MSG84 ; CHAMA MENSAGEM PARA MOSTRAR 1 METRO E 40 CM
LCD150: CJNE A,#096H,LCD160 ; COMPARAÇÃO PARA ENVIO DE MENSAGEM PARA LCD
JMP MSG85 ; CHAMA MENSAGEM PARA MOSTRAR 1 METRO E 50 CM
LCD160: CJNE A,#0A0H,LCD170 ; COMPARAÇÃO PARA ENVIO DE MENSAGEM PARA LCD
LCD170: CJNE A,#0AAH,LCD180 ; COMPARAÇÃO PARA ENVIO DE MENSAGEM PARA LCD
JMP MSG87 ; CHAMA MENSAGEM PARA MOSTRAR 1 METRO E 70 CM
LCD180: CJNE A,#0B4H,LCD190 ; COMPARAÇÃO PARA ENVIO DE MENSAGEM PARA LCD
JMP MSG88 ; CHAMA MENSAGEM PARA MOSTRAR 1 METRO E 80 CM
LCD190: CJNE A,#0BEH,LCD200 ; COMPARAÇÃO PARA ENVIO DE MENSAGEM PARA LCD
JMP MSG89 ; CHAMA MENSAGEM PARA MOSTRAR 1 METRO E 90 CM
LCD200: CJNE A,#0C8H,PULA ; COMPARAÇÃO PARA ENVIO DE MENSAGEM PARA LCD
JMP MSG90 ; CHAMA MENSAGEM PARA MOSTRAR 2 METROS
PULA: LJMP DIGIT
;--- ;-CALCULO DE MAQUINA PARA QUANTIDADE INFORMADA ;---
NOVO:
62
DIV AB ; DIVIDIR VALOR DE ACC POR REGISTRADOR B MOV R0,A ; MOVER VALOR DE ACC PARA REGISTRADOR 0
CLR A ; LIMPA ACC
;---
;---OPERAÇÃO DA MÁQUINA--- ;---
START: JMP MSG3 ; ESCREVE NO DISPLAY MÁQUINA EM OPERAÇÃO
ROLL: CLR P1.5 ; CLEAR EM P1.5 PARA LIGAR MOTOR ENROLADOR DE FIOS
CJNE A,#1H,COMP ; COMPARA O VALOR DE ACC COM 1 HEXA, SE FOR DIFERENTE PULA PARA LABEL COMP
JMP MSG5 ; ESCREVE NO DISPLAY ENROLANDO FIOS DA MESA SCROLL: CALL DELAY2 ; CHAMA ROTINA DE TEMPO 2
CLR A ; LIMPA ACC
JMP OFF2 ; PULA PARA LABEL OFF2
COMP:
JNB P3.0,DECR ; AGUARDA PULSO DO SENSOR PARA DECREMENTAR 2 CM DA MEDIDA
JMP COMP ; LOOP ROTINA DE VARREDURA DO SENSOR REFERENCIAL DE MEDIDA
DECR:
JB P3.0,COMPARE ; AGUARDA P3.0 EM NIVEL 1 PARA SEGUIR PARA LABEL DE COMPARAÇÃO DO REGISTRADOR
JMP UP ; LOOP PARA VARREDURA DE AGUARDO EM P3.0 AGUARDANDO SER NIVEL ALTO
COMPARE:
CJNE R0,#00H,COMP ; COMPARA SE O VALOR DE R0 É 0 SE NÃO FOR SEGUE PARA LABEL COMP
JMP MSG4 ; ESCREVE NO DISPLAY ETAPA DE CORTE
OFF2:
SETB P1.5 ; SET BIT EM P1.5 PARA DESLIGAR MOTOR ENROLADOR DE FIOS
CJNE A,#02H,LCONGRA ; COMPARA ACC COM 2 HEXA SE FOR DIFERENTE PULA PARA LABEL LCONGRA
JMP PINCA ; PULA PARA LABEL PINCA
LCONGRA:LJMP CONGRA ; SALTO LONGO PARA LABEL CONGRA
PINCA:
CLR A ; LIMPA ACC
CLR P1.6 ; CLEAR EM P1.6 PARA ACIONAR A PINÇA CALL DELAY2 ; CHAMA ROTINA DE TEMPO 2
JMP FACA ; PULA PARA LABEL FACA OFFPIN:
SETB P1.6 ; SET BIT EM P1.6 PARA DESACIONAR A PINÇA JMP OFFCUT ; PULA PARA LABEL OFFCUT
FACA:
64
CALL DELAY2 ; CHAMA ROTINA DE TEMPO 2 JMP OFFPIN ; PULA APARA LABEL OFFPIN OFFCUT:
SETB P1.7 ; SET BIT EM P1.7 PARA DESACIONAR A FACA DE CORTE
MOV A,#1H ; MOVE O VALOR 1 HEXA PARA O ACC JMP ROLL ; PULA PARA LABEL ROLL
;--- ;---DELAYS--- ;---
DELAY:
MOV R2, #8
VOLTA2: MOV R3, #250 VOLTA1: MOV R4, #250
DJNZ R4,$
DJNZ R3, VOLTA1 DJNZ R2, VOLTA2
RET ; RETORNA PARA LINHA ABAIXO DA CALL
DELAY2:
MOV R2, #16
VOLTA4: MOV R3, #250 VOLTA3: MOV R4, #250
DJNZ R4,$
DJNZ R2, VOLTA4
RET ; RETORNA PARA LINHA ABAIXO DA CALL
DELAY3:
MOV R2, #15
VOLTA6: MOV R3, #250 VOLTA5: MOV R4, #250
DJNZ R4,$
DJNZ R3, VOLTA5 DJNZ R2, VOLTA6
RET ; RETORNA PARA LINHA ABAIXO DA CALL
DELAYC:
MOV R2, #2
VOLTA8: MOV R3, #250 VOLTA7: MOV R4, #250
DJNZ R4,$
DJNZ R3, VOLTA7 DJNZ R2, VOLTA8
RET ; RETORNA PARA LINHA ABAIXO DA CALL
66
68
13 – ORÇAMENTO
COMPONENTE APLICAÇÃO UNIDADE QNT VALOR UNI VALOR TOTAL
CHAPA DE FERRO ESTRUTURA PÇ 1 R$ 60,00 R$ 60,00
BARRA DE FERRO ESTRUTURA PÇ 2 R$ 17,50 R$ 35,00
SPRAY CINZA ESTRUTURA PÇ 2 R$ 11,50 R$ 23,00
PLACA DE ACRILICO ESTRUTURA PÇ 1 R$ 68,00 R$ 68,00
PORCAS E PARAFUSOS ESTRUTURA PÇ 10 R$ 0,50 R$ 5,00
CUSTO DA SOLDAGEM ESTRUTURA - 1 R$ 20,00 R$ 20,00
GUIA DO FIO ESTRUTURA PÇ 2 R$ 10,00 R$ 20,00
CILINDRO PNEUMATICO PNEUMATICA PÇ 2 R$ 50,00 R$ 100,00
VÁLVULA SOLENÓIDE PNEUMATICA PÇ 2 R$ 52,00 R$ 104,00
MANGUEIRA CIRCUITO PNEUMATICA METRO 2 R$ 5,00 R$ 10,00
SILENCIADOR PNEUMATICA PÇ 4 R$ 15,00 R$ 60,00
MOTOR COM REDUTOR ELÉTRICA PÇ 1 R$ 250,00 R$ 250,00
SENSOR INDUTIVO ELÉTRICA PÇ 2 R$ 30,00 R$ 60,00
RELÉ 5 V ELETRÔNICA PÇ 3 R$ 2,00 R$ 6,00
RESISTOR ELETRÔNICA PÇ 5 R$ 0,20 R$ 1,00
DIODO 4007 ELETRÔNICA PÇ 5 R$ 0,20 R$ 1,00
TRANSISTOR ELETRÔNICA PÇ 4 R$ 0,60 R$ 2,40
DISPLAY LCD ELETRÔNICA PÇ 1 R$ 19,60 R$ 19,60
14 – CONCLUSÃO
Vivemos em uma época de tecnologias e isso nos faz perceber como os equipamentos que utilizamos de uma hora pra outra estão ultrapassadas.
Geralmente a tecnologia busca facilitar a vida do homem lhe trazendo benefícios. Nosso projeto buscou revelar as vantagens em automatizar o enrolador de fios. Ficaram evidentes durante todo o trabalho que a sua eficácia é comprovada e também suas vantagens.
Razões pela implantação são inúmeras, tanto ergonômicas por parte do operador, econômicas por parte do comerciante e satisfatória por parte do cliente.
Os objetivos são a saúde do operador e o atendimento ao cliente e é nisso que nosso grupo sempre enfatizou para um projeto com confiabilidade e
70
15 – REFERÊNCIAS
Clube do Hardware. Disponível em: http://forum.clubedohardware.com.br/topic/1137000-programar-display-16x2-em-assembly-com-pic16f628a/ Acessado:02/11/2015
Arduinoecia. Disponível em: http://www.arduinoecia.com.br/2014/06/arduino-display-lcd-20x4.html Acessado:02/11/2015
Info Wester Disponível em: http://www.infowester.com/fontesatx.php Acessado:02/11/2015
Apostila Pneumática. Disponível em: http://sites.poli.usp.br/d/pmr2481/pneumat2481.pdf Acessado:02/11/2015
Microar Disponível em: http://www.microar.com.br/ Acessado:09/11/2015