FUNDAÇÃO ESCOLA TÉCNICA LIBERATO SALZANO VIEIRA DA CUNHA
CURSO DE ELETRÔNICA
PROCESSAMENTO DE SINAIS Prof. Irineu Alfredo Ronconi Junior
USANDO UM CONTROLADOR PID PARA O CONTROLE DE TEMPERATURA DE UMA CÂMARA
Introdução:
A presente prática de laboratório tem como base o texto de Carlos Eduardo Fontes da Silva (Eng. Químico) e Victor Orlando Gamarra Rosado (Eng. Mecânico e Prof. da UNESP) publicado na Revista de Ciências Exatas, UNITAU. Vol18, n.1,P.50-58, 2012 : Sintonia de um Controlador PID, no Aquecimento de uma Câmara Térmica.
A escolha do mesmo se deve ao fato de que os circuitos com Amplificadores Operacionais e a Teoria de Controle, foram assuntos tratados em aula. Há uma interdisciplinaridade com Eletrônica de Potência, na qual os componentes e circuitos também não são novidade.
Diagrama de blocos do sistema:
O diagrama em blocos do sistema é mostrado na figura 01, a seguir.
Figura 1- Diagrama em blocos do sistema de controle
Como se pode ver nem um bloco é desconhecido: O tca é o componente de controle de disparo de SCR´s. O Triac é um componente já usado e ensaiado nas aulas de Eletrônica de Potência. A câmara é constituída de uma latinha de cerveja envolta em um isopor. Os aquecedores serão resistores de potência elevada (10W) e o NTC o sensor de temperatura, amplamente utilizado em equipamentos para controle de temperatura.
O Controlador será composto por combinações das montagens, também já estudadas, nas configurações: Amplificador inversor (proporcional), diferenciador e integrador. A malha de realimentação será composta de comparadores que deverão gerar o sinal de erro.
O NTC (Negative Temperature Coeficient) apresenta uma curva de resposta de acordo com a equação ):
Onde:
R é a resistência em [Ω];
A é uma constate relativa a classe do NTC
B é uma constante em graus Kelvin que deve ser determinada; T é a temperatura em graus Kelvin.
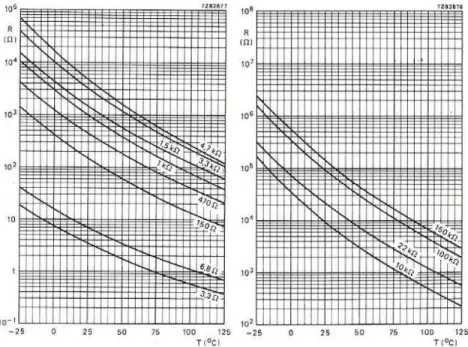
Os valores das constantes A e B podem ser determinados experimentalmente ou através de curvas características em folha de dados dos componentes. Na figura 2 temos uma série de curvas de diversos valores de resistência a 250C de NTC´s.
Figura 2 - Curvas características de NTC
Como exemplo, iremos determinar a equação referente ao NTC de 10kΩ. Começamos escolhendo dois pontos de fácil leitura de valores. Então em 250C (valor de referência) o valor
é 10kΩ. Em 500C a leitura nos indica 2kΩ. É necessário converter as temperaturas de Celsius
para Kelvin, então 250C corresponde 298,15K e 500C a 323,15K.
= . (2) e
= . (3)
= .
. =
(4)A=
= ln = − (5)
Portanto B será dado por 6.
= (6)
Então, colocando os valores, teremos:
= 10000 − 30001
298,15 −323,151
≅ 4640
Da mesma forma calculamos a constante A:
= − = 10000 −4624,30298,15 ≅ −6,35
Então
≅ 1,84. 10 Ω .
Logo: = 1,84. 10 . , [Ω] (7)
A temperatura é tomada em graus Kelvin (K):
( ) = ( ) + 273,15 [K]
O gráfico, utilizando a equação (7) resulta em:
O circuito Eletrônico a ser utilizado:
O circuito eletrônico a ser usado constitui-se de uma montagem em paralelo dos circuitos de Amplificadores operacionais nas configurações Inversor (proporcional), Integrador e diferenciador. O Esquema em blocos do sistema é o mostrado na figura 4:
Figura 4 - Controlador PID paralelo
Então a função de transferência da planta será dada por:
( ) = 1 + . + . ( ) (7)
O circuito BASE é mostrado na figura 5 a seguir:
Figura 5 - Circuito PID a ser utilizado NTC UTILIZADO 1KΩ
Sintonia do PID Método Ziegler – Nichols:
A sintonia é feita utilizando o método de Ziegler-Nichols, que é um método prático para ajustar os parâmetros Ti, Td e Kp, de forma experimental (consulte suas notas de aula e o
material no site). Inicialmente o sistema é ligado somente com o amplificador inversor (proporcional) e então é aplicado ao sistema um degrau unitário, conforme o mostra a figura 6.
Figura 6 - Sintonia do PID
Neste caso, conforme o já estudado em aula, a resposta do sistema é do tipo de primeira ordem e apresenta um gráfico da seguinte forma:
Figura 7- Resposta a entrada em degrau
Onde K é o ganho ideal do sistema (proporcional), L é o chamado atraso de transporte e T a constante de tempo da planta (sistema).
Neste caso, tendo em vista à resposta exponencial do NTC a função de transferência do sistema (após a aplicação da Transformada de Laplace) será:
( ) = . ..(8)
O estudo de Ziegler e Nichols resultou, para casos semelhantes a esse, a seguinte tabela (1) de ajuste da planta:
Controlador Kp Ti Td
P T/L ∞ 0
PI 0,9T/L L/(0,3) 0
PID 1,2T/L 2L 0,5L
Tabela 1 Cálculo de parâmetros Ziegler-Nichols
a) Primeiro devemos determinar a tensão de referência sobre R3. Esta tensão dependo
do valor da resistência do NTC. Para o caso do esquema a temperatura de ajuste foi de 38oC;
b) O Cálculo do valor teórico da resistência do NTC foi realizado pela equação (1) e correspondeu a um valor de aproximadamente 622Ω, que permitiu o cálculo do valor da tensão de referência;
c) O valor da tensão de referência é dado sobre R3 aplicando-se a Lei de Ohm. Neste caso
equivale a aproximadamente 6,5V;
d) Aplica-se então a tensão de referência, na entrada sem o integrador e o diferenciador, e ao mesmo tempo, a cada 30s, se faz a leitura no voltímetro que está conectado a R3;
e) Desenha-se o gráfico correspondente (foi usado o excel para este fim):
Figura 8 - Ajuste de sintonia
f) Do gráfico retira-se L e T para o cálculo dos parâmetros de sintonia da planta. No caso L=9 e T=210 (aproximadamente). Então:
Controlador Kp Ti Td
P 24,3 ∞ 0
PI 21 30 0
PID 28 18 4,5
Tabela 2 Cálculo de parâmetros Ziegler-Nichols
g) A seguir adiciona-se os demais controladores (PI, PID), compara-se e ajusta-se novamente para cada caso o Kp e os demais parâmetros.
Tarefas: