FUNDAÇÃO ESCOLA TÉCNICA LIBERATO SALZANO VIEIRA DA CUNHA CURSO DE ELETRÔNICA
ELETRÔNICA DE POTÊNCIA Prof. Irineu Alfredo Ronconi Junior
O MOTOR UNIVERSAL
MOTOR UNIVERSAL
O motor universal é muito semelhante a um motor de corrente contínua ligado em série, sendo, entretanto, tanto o rotor quanto o estator montados em chapas de ferro (devido as perdas por correntes parasitas). Podem ser ligados na rede de corrente contínua ou na rede AC, uma vez que os campos no estator e no rotor se invertem simultaneamente, quando a corrente inverte o seu sentido, fazendo com que a rotação fique sempre a mesma. Os motores universais apresentam elevado torque de partida, e tendência a disparar. São motores altamente usados em CA. Sua potência normalmente gira em torno de 500W.
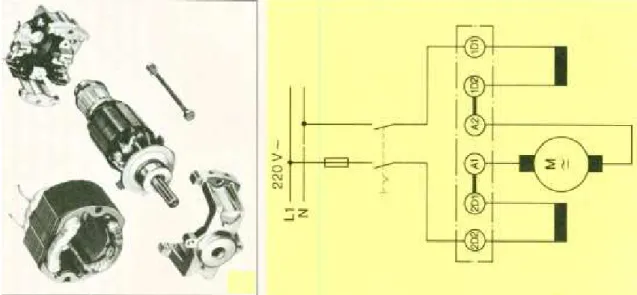
Figura 1 – Partes e esquema do motor universal
Quando o motor universal é ligado a uma rede DC, o seu equacionamento é praticamente o mesmo do motor DC ligado em série.
a a i k
T = φ [1]
m a a k
E = φω [2]
Em uma região não saturada:
2
a ki
T = [3]
t I
ia= acosω [4]
t M ω φ
φ= cos [5]
A força contra-eletromotriz será:
t k
Ea= aφωmcosω [6]
O valor RMS será :
m M a a k
E φ ω
2
= [7]
Observar que ia e ea estão em fase, então:
) 2 cos 1 (
cos2 t k I t I
k i k
Te= aφa = aφM a ω = aφM a + ω [8]
O torque médio será dado por:
2 a M a
I k
T = φ [9]
E a potência mecânica será dada por:
m a a mec E I T
P = = ω [10]