GEOMETRIA ANAL´ITICA E ´
ALGEBRA LINEAR
Reginaldo J. Santos
Departamento de Matem ´atica-ICEx
Universidade Federal de Minas Gerais
http://www.mat.ufmg.br/~regi
´
E proibida a reproduc¸ ˜ao desta publicac¸ ˜ao, ou parte dela, por qualquer meio, sem a pr ´evia autorizac¸ ˜ao, por escrito, do autor.
Editor, Coordenador de Revis ˜ao, Supervisor de Produc¸ ˜ao, Capa e Ilustrac¸ ˜oes: Reginaldo J. Santos
ISBN 85-7470-006-1
Ficha Catalogr ´afica
Santos, Reginaldo J.
S237u Um Curso de Geometria Anal´ıtica e ´Algebra Linear / Reginaldo J. Santos - Belo Horizonte: Imprensa Universit ´aria da UFMG, 2007.
1. ´Algebra Linear 2. Geometria Anal´ıtica I. T´ıtulo
Pref ´acio vii
1 Matrizes e Sistemas Lineares 1
1.1 Matrizes . . . 1
1.1.1 Operac¸ ˜oes com Matrizes . . . 3
1.1.2 Propriedades da ´Algebra Matricial . . . 10
1.1.3 Aplicac¸ ˜ao: Cadeias de Markov . . . 16
Ap ˆendice I: Notac¸ ˜ao de Somat ´orio . . . 33
1.2 Sistemas de Equac¸ ˜oes Lineares . . . 35
1.2.1 M ´etodo de Gauss-Jordan. . . 39
1.2.2 Matrizes Equivalentes por Linhas . . . 50
1.2.3 Sistemas Lineares Homog ˆeneos . . . 52
2 Invers ˜ao de Matrizes e Determinantes 77
2.1 Matriz Inversa . . . 77
2.1.1 Propriedades da Inversa . . . 79
2.1.2 Matrizes Elementares e Invers ˜ao (opcional) . . . 82
2.1.3 M ´etodo para Invers ˜ao de Matrizes . . . 86
2.1.4 Aplicac¸ ˜ao: Interpolac¸˜ao Polinomial . . . 96
2.1.5 Aplicac¸ ˜ao: Criptografia . . . 98
2.2 Determinantes . . . 107
2.2.1 Propriedades do Determinante . . . 113
2.2.2 Matrizes Elementares e o Determinante (opcional) . . . 128
Ap ˆendice II: Demonstrac¸ ˜ao do Teorema 2.11 . . . 136
3 Vetores no Plano e no Espac¸o 142 3.1 Soma de Vetores e Multiplicac¸ ˜ao por Escalar . . . 144
3.2 Produtos de Vetores . . . 180
3.2.1 Norma e Produto Escalar . . . 180
3.2.2 Projec¸ ˜ao Ortogonal . . . 194
3.2.3 Produto Vetorial . . . 197
3.2.4 Produto Misto . . . 209
Ap ˆendice III: Demonstrac¸ ˜ao do item (e) do Teorema 3.5 . . . 226
4 Retas e Planos 229 4.1 Equac¸ ˜oes de Retas e Planos . . . 229
4.1.1 Equac¸ ˜oes do Plano . . . 229
4.1.2 Equac¸ ˜oes da Reta . . . 244
4.2.1 Angulosˆ . . . 270
4.2.2 Dist ˆancias . . . 277
5 Espac¸osRn 300 5.1 Independ ˆencia Linear . . . 300
5.1.1 Os Espac¸osRn . . . . 300
5.1.2 Combinac¸˜ao Linear . . . 305
5.1.3 Independ ˆencia Linear. . . 311
5.1.4 Posic¸˜oes Relativas de Retas e Planos . . . 322
5.2 Subespac¸os, Base e Dimens ˜ao . . . 329
Ap ˆendice IV: Outros Resultados . . . 355
5.3 Produto Escalar emRn . . . . 363
5.3.1 Produto Interno . . . 363
5.3.2 Bases Ortogonais e Ortonormais . . . 372
5.4 Mudanc¸a de Coordenadas . . . 382
5.4.1 Rotac¸ ˜ao . . . 388
5.4.2 Translac¸ ˜ao . . . 390
5.4.3 Aplicac¸ ˜ao: Computac¸ ˜ao Gr ´afica - Projec¸ ˜ao Ortogr ´afica . . . 393
6 Diagonalizac¸ ˜ao 405 6.1 Diagonalizac¸ ˜ao de Matrizes . . . 405
6.1.1 Motivac¸˜ao . . . 405
6.1.2 Autovalores e Autovetores . . . 408
6.1.3 Diagonalizac¸ ˜ao . . . 418
6.2 Diagonalizac¸ ˜ao de Matrizes Sim ´etricas . . . 440
6.2.2 Matrizes Ortogonais . . . 443
Ap ˆendice V: Autovalores Complexos . . . 454
6.3 Aplicac¸ ˜ao: Identificac¸ ˜ao de C ˆonicas . . . 458
6.3.1 Elipse . . . 458
6.3.2 Hip ´erbole . . . 465
6.3.3 Par ´abola . . . 472
Respostas dos Exerc´ıcios 500
Bibliografia 683
Este texto cobre o material para um curso de um semestre de Geometria Anal´ıtica e ´Algebra Linear ministrado nos primeiros semestres para estudantes da ´area de Ci ˆencias Exatas. O texto pode, mas n ˜ao ´e necess ´ario, ser acompanhado de um programa como o MATLABr∗, SciLab ou o Maxima.
O conte ´udo ´e dividido em seis cap´ıtulos. O Cap´ıtulo 1 trata das matrizes e sistemas lineares. Aqui todas as propriedades da ´algebra matricial s ˜ao demonstradas. A resoluc¸ ˜ao de sistemas lineares ´e feita usando somente o m ´etodo de Gauss-Jordan (transformando a matriz at ´e que ela esteja na forma escalonada reduzida). Este m ´etodo requer mais trabalho do que o m ´etodo de Gauss (transformando a matriz, apenas, at ´e que ela esteja na forma escalonada). Ele foi o escolhido, por que tamb ´em ´e usado no estudo da invers ˜ao de matrizes no Cap´ıtulo 2. Neste Cap´ıtulo ´e tamb ´em estudado o determinante, que ´e definido usando cofatores. As demonstrac¸ ˜oes dos resultados deste cap´ıtulo podem ser, a crit ´erio do leitor, feitas somente para matrizes3×3.
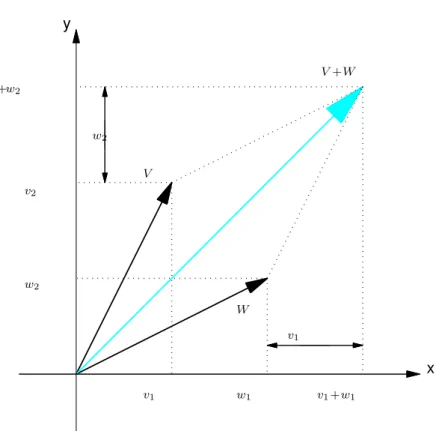
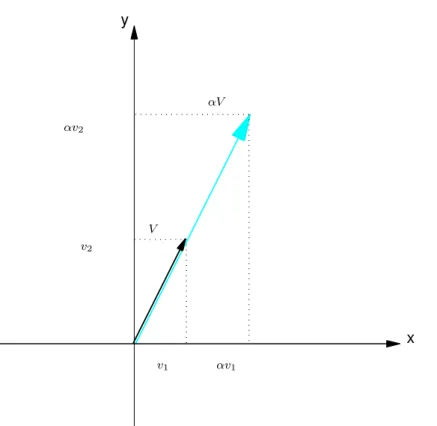
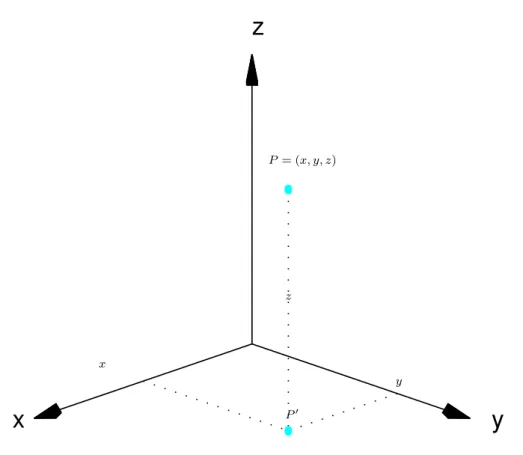
O Cap´ıtulo 3 trata de vetores no plano e no espac¸o. Os vetores s ˜ao definidos de forma geom ´etrica,
assim como a soma e a multiplicac¸ ˜ao por escalar. S ˜ao provadas algumas propriedades geometrica-mente. Depois s ˜ao introduzidos sistemas de coordenadas de forma natural sem a necessidade da definic¸ ˜ao de base. Os produtos escalar e vetorial s ˜ao definidos tamb ´em geometricamente. O Cap´ıtulo 4 trata de retas e planos no espac¸o. S ˜ao estudados ˆangulos e dist ˆancias entre retas e planos.
O Cap´ıtulo 5 cobre a teoria dos espac¸os euclidianos. O conceito de depend ˆencia e independ ˆencia linear ´e introduzido de forma alg ´ebrica, acompanhado da interpretac¸ ˜ao geom ´etrica para os casos de R2eR3. Aqui s ˜ao estudadas as posic¸ ˜oes relativas de retas e planos como uma aplicac¸ ˜ao do conceito
de depend ˆencia linear. S ˜ao tamb ´em tratados os conceitos de geradores e de base de subespac¸os. S ˜ao abordados tamb ´em o produto escalar e bases ortonormais. O Cap´ıtulo ´e terminado com mudanc¸a de coordenadas preparando para o Cap´ıtulo de diagonalizac¸ ˜ao.
O Cap´ıtulo 6 traz um estudo da diagonalizac¸ ˜ao de matrizes em geral e diagonalizac¸ ˜ao de matrizes sim ´etricas atrav ´es de um matriz ortogonal. ´E feita uma aplicac¸ ˜ao ao estudo das sec¸ ˜oes c ˆonicas.
Os exerc´ıcios est ˜ao agrupados em tr ˆes classes. Os “Exerc´ıcios Num ´ericos”, que cont ´em exerc´ıcios que s ˜ao resolvidos fazendo c ´alculos, que podem ser realizados sem a ajuda de um com-putador ou de uma m ´aquina de calcular. Os “Exerc´ıcios Te ´oricos”, que cont ´em exerc´ıcios que reque-rem demonstrac¸˜oes. Alguns s ˜ao simples, outros s ˜ao mais complexos. Os mais dif´ıceis complemen-tam a teoria e geralmente s ˜ao acompanhados de sugest ˜oes. Os “Exerc´ıcios usando o MATLABr”, que cont ´em exerc´ıcios para serem resolvidos usando o MATLABr ou outro software. Os comandos necess ´arios a resoluc¸ ˜ao destes exerc´ıcios s ˜ao tamb ´em fornecidos juntamente com uma explicac¸ ˜ao r ´apida do uso. Os exerc´ıcios num ´ericos s ˜ao imprescind´ıveis, enquanto a resoluc¸ ˜ao dos outros, de-pende do n´ıvel e dos objetivos pretendidos para o curso.
direci-onadas para o estudo de Geometria Anal´ıtica e ´Algebra Linear pode ser obtido na web na p ´agina do autor, assim como um texto com uma introduc¸ ˜ao ao MATLABre instruc¸ ˜oes de como instalar o pacote gaal. O MATLABr n ˜ao ´e um software gratuito, embora antes a vers ˜ao estudante vinha gr ´atis ao se comprar o guia do usu ´ario. Atualmente o SciLab ´e uma alternativa gratuita, mas que n ˜ao faz c ´alculo simb ´olico. O Maxima ´e um programa de computac¸ ˜ao alg ´ebrica gratuito. Ambos podem ser usados como ferramenta auxiliar na aprendizagem de Geometria Anal´ıtica e ´Algebra Linear. Na p ´agina do autor na web podem ser encontrados pacotes de func¸ ˜oes para estes programas al ´em de links para as p ´aginas do SciLab e do Maxima e v ´arias p ´aginas interativas que podem auxiliar na aprendizagem.
No fim de cada cap´ıtulo temos um “Teste do Cap´ıtulo” para que o aluno possa avaliar os seus conhecimentos. Os Exerc´ıcios Num ´ericos e os Exerc´ıcios usando o MATLABr est ˜ao resolvidos ap ´os o ´ultimo cap´ıtulo utilizando o MATLABr. Desta forma o leitor que n ˜ao estiver interessado em usar o software pode obter apenas as respostas dos exerc´ıcios, enquanto aquele que tiver algum interesse, pode ficar sabendo como os exerc´ıcios poderiam ser resolvidos fazendo uso do MATLABre do pacote gaal.
Hist ´orico
Julho 2007 Algumas correc¸ ˜oes. As respostas de alguns exerc´ıcios foram reescritas.
Marc¸o 2007 V ´arias figuras foram refeitas e outras acrescentadas. Foram reescritos o Exemplo 3.12 e o Corol ´ario 3.10. Na sec¸ ˜ao 5.2 um exemplo foi reescrito e acrescentado mais um. Os Exemplos 5.25e 5.26 foram reescritos, sa´ıram do ap ˆendice e voltaram ao texto normal. A sec¸ ˜ao 5.4 de Mudanc¸a de Coordenadas foi reescrita e acrescentada uma aplicac¸ ˜ao `a computac¸ ˜ao gr ´afica. Foram acrescentados dois exerc´ıcios na sec¸ ˜ao de Matrizes, um na de Invers ˜ao de Matrizes, um na sec¸ ˜ao de Determinantes, dois na de Produto de Vetores, um na de Subespac¸os, um na de Produto Escalar emRn, tr ˆes na de Mudanc¸a de Coordenadas, quatro na de Diagonalizac¸ ˜ao e um na de Diagonalizac¸ ˜ao de Matrizes Sim ´etricas. Foram corrigidos alguns erros.
Julho 2006 Foi acrescentado o Exemplo 2.16 na p ´agina 124. A sec¸ ˜ao 3.2 ’Produtos de Vetores’ foi reescrita. Foi acrescentado um exerc´ıcio na sec¸ ˜ao 4.2. O Cap´ıtulo 5 foi reescrito. Foram corrigidos alguns erros.
Marc¸o 2006 A Sec¸ ˜ao 1.1 de Matrizes e a Sec¸ ˜ao 2.2 de Determinantes foram reescritas. Na sec¸ ˜ao 1.2 o Teorema 1.4 voltou a ser que toda matriz ´e equivalente por linhas a uma ´unica matriz na forma escalonada reduzida. Foram acrescentados v ´arios exerc´ıcios aos Cap´ıtulos 3 e 4. O Cap´ıtulo 5 foi reescrito. Foram acrescentados exerc´ıcios te ´oricos `a sec¸ ˜ao ’Aplicac¸ ˜ao `a C ˆonicas’.
equivalente por linhas” com a demonstrac¸ ˜ao. O que antes era Exemplo 1.14 passou para o lugar do Exemplo 1.10. O Exemplo 2.5 foi modificado. No Cap´ıtulo 3 foram acrescentados 2 exerc´ıcios na sec¸ ˜ao 3.1, 1 exerc´ıcio na sec¸ ˜ao 3.2. No Cap´ıtulo 4 a sec¸ ˜ao 4.1 foi reescrita e foram acrescentados 2 exerc´ıcios. O Cap´ıtulo 5 foi reescrito. Foi inclu´ıda no Ap ˆendice III da sec¸ ˜ao 5.2. a demonstrac¸ ˜ao de que a forma escalonada reduzida de uma matriz ´e ´unica. A sec¸ ˜ao ’Diagonalizac¸˜ao de Matrizes’ ganhou mais um exerc´ıcio te ´orico.
Setembro 2003 Foi acrescentada a regra de Cramer na sec¸ ˜ao ’Determinantes’ (Exemplo 2.20). A sec¸ ˜ao ’Subespac¸os, Base e Dimens ˜ao’ foi reescrita. Foi acrescentado um ap ˆendice a esta sec¸ ˜ao com ’Outros resultados’. A Proposic¸ ˜ao 5.15 da sec¸ ˜ao ’Produto Escalar em Rn foi re-escrita. A sec¸ ˜ao ’Diagonalizac¸ ˜ao de Matrizes’ ganhou mais dois exerc´ıcios te ´oricos. A sec¸ ˜ao ’Diagonalizac¸˜ao de Matrizes Sim ´etricas’ ganhou um ap ˆendice sobre ’Autovalores Complexos’.
Novembro 2002 V ´arias correc¸ ˜oes incluindo respostas de exerc´ıcios. A sec¸ ˜ao ’Subespac¸os, Base e Dimens ˜ao’ ganhou mais um exemplo e um exerc´ıcio. A sec¸ ˜ao ’Diagonalizac¸˜ao de Matrizes Sim ´etricas’ ganhou mais um exemplo.
Julho 2001 Revis ˜ao completa no texto. Novos exerc´ıcios nas sec¸ ˜oes ’Matrizes’ e ’Sistemas Lineares’. As sec¸ ˜oes ’Subespac¸os’ e ’Base e Dimens ˜ao’ tornaram-se uma s ´o. A sec¸ ˜ao ’Mudanc¸a de Coordenadas’ passou do Cap´ıtulo 6 para o Cap´ıtulo 5.
Sugest ˜ao de Cronograma
Cap´ıtulo 1 8 aulas
Cap´ıtulo 2 8 aulas
Cap´ıtulo 3 8 aulas
Cap´ıtulo 4 8 aulas
Cap´ıtulo 5 16 (12) aulas
Cap´ıtulo 6 12 aulas
Matrizes e Sistemas Lineares
1.1
Matrizes
UmamatrizA,m×n(mporn), ´e uma tabela demnn ´umeros dispostos emmlinhas encolunas
A=
a11 a12 . . . a1n
a21 a22 . . . a2n
..
. . . . ...
am1 am2 . . . amn
.
Ai- ´esima linhadeA ´e
ai1 ai2 . . . ain
parai= 1, . . . , me aj- ´esima colunadeA ´e
a1j
a2j
.. .
amj
,
paraj = 1, . . . , n. Usamos tamb ´em a notac¸ ˜aoA = (aij)m×n. Dizemos queaij ou[A]ij ´e oelemento
ou aentradade posic¸ ˜aoi, jda matrizA.
Sem=n, dizemos queA ´e umamatriz quadrada de ordemne os elementosa11, a22, . . . , ann
formam adiagonal (principal)deA.
Exemplo 1.1. Considere as seguintes matrizes:
A=
1 2 3 4
, B =
−2 1 0 3
, C =
1 3 0 2 4 −2
,
D= 1 3 −2 , E =
1 4
−3
eF = 3 .
As matrizesA eB s ˜ao 2×2. A matrizC ´e 2×3, D ´e 1×3, E ´e 3×1e F ´e1×1. De acordo com a notac¸ ˜ao que introduzimos, exemplos de elementos de algumas das matrizes dadas acima s ˜ao
a12= 2,c23 =−2,e21 = 4,[A]22= 4,[D]12= 3.
matriz coluna. Matrizes linha e matrizes coluna s ˜ao chamadas devetores. O motivo ficar ´a claro na Sec¸ ˜ao5.1na p ´agina300.
Dizemos que duas matrizes s ˜ao iguais se elas t ˆem o mesmo tamanho e os elementos correspon-dentes s ˜ao iguais, ou seja,A = (aij)m×n eB = (bij)p×q s ˜aoiguaissem = p, n = q eaij = bij
parai= 1, . . . , mej = 1, . . . , n.
Vamos definir operac¸ ˜oes matriciais an ´alogas `as operac¸ ˜oes com n ´umeros e provar propriedades que s ˜ao v ´alidas para essas operac¸ ˜oes. Veremos, mais tarde, que um sistema de equac¸ ˜oes lineares pode ser escrito em termos de uma ´unica equac¸ ˜ao matricial.
Vamos, agora, introduzir as operac¸ ˜oes matriciais.
1.1.1
Operac¸ ˜oes com Matrizes
Definic¸ ˜ao 1.1. A soma de duas matrizes de mesmo tamanho A = (aij)m×n e B = (bij)m×n ´e
definida como sendo a matrizm×n
C =A+B
obtida somando-se os elementos correspondentes deAeB, ou seja,
cij =aij +bij,
Exemplo 1.2. Considere as matrizes:
A=
1 2 −3
3 4 0
, B =
−2 1 5
0 3 −4
Se chamamos deCa soma das duas matrizesAeB, ent ˜ao
C=A+B =
1 + (−2) 2 + 1 −3 + 5 3 + 0 4 + 3 0 + (−4)
=
−1 3 2
3 7 −4
Definic¸ ˜ao 1.2. Amultiplicac¸ ˜ao de uma matrizA = (aij)m×npor um escalar(n ´umero)α ´e definida
pela matrizm×n
B =αA
obtida multiplicando-se cada elemento da matrizApelo escalarα, ou seja,
bij =α aij,
parai = 1, . . . , mej = 1, . . . , n. Escrevemos tamb ´em[αA]ij = α aij. Dizemos que a matrizB ´e
umm ´ultiplo escalarda matrizA.
Exemplo 1.3. O produto da matrizA=
−2 1
0 3
5 −4
pelo escalar−3 ´e dado por
−3A=
(−3)(−2) (−3) 1 (−3) 0 (−3) 3 (−3) 5 (−3)(−4)
=
6 −3 0 −9
−15 12
Definic¸ ˜ao 1.3. Oprodutode duas matrizes, tais que o n ´umero de colunas da primeira matriz ´e igual ao n ´umero de linhas da segunda,A= (aij)m×p eB = (bij)p×n ´e definido pela matrizm×n
C =AB
obtida da seguinte forma:
cij = ai1b1j+ai2b2j +. . .+aipbpj, (1.1)
parai= 1, . . . , mej = 1, . . . , n. Escrevemos tamb ´em[AB]ij =ai1b1j +ai2b2j+. . .+aipbpj.
A equac¸ ˜ao (1.1) est ´a dizendo que o elemento i, j do produto ´e igual `a soma dos produtos dos elementos dai- ´esima linha deApelos elementos correspondentes daj- ´esima coluna deB.
c11 . . . c1n
..
. cij ...
cm1 . . . cmn
=
a11 a12 . . . a1p
..
. . . . ...
ai1 ai2 . . . aip
..
. . . . ...
am1 am2 . . . amp
b11 b21 .. .
bp1
. . . . . . . . . . . .
b1j
b2j
.. . bpj . . . . . . . . . . . .
b1n
b2n
.. . bpn
A equac¸ ˜ao (1.1) pode ser escrita de forma compacta usando anotac¸ ˜ao de somat ´orio.
[AB]ij =ai1b1j+ai2b2j +. . .+aipbpj = p
X
k=1
e dizemos “somat ´orio dekvariando de1apdeaikbkj”. O s´ımbolo p
X
k=1
significa que estamos fazendo
uma soma em que o ´ındicek est ´a variando dek = 1at ´ek =p. Algumas propriedades da notac¸ ˜ao de somat ´orio est ˜ao explicadas noAp ˆendice I na p ´agina33.
Exemplo 1.4. Considere as matrizes:
A=
1 2 −3
3 4 0
, B =
−2 1 0
0 3 0
5 −4 0
.
Se chamamos deCo produto das duas matrizesAeB, ent ˜ao
C=AB =
1 (−2) + 2·0 + (−3) 5 1·1 + 2·3 + (−3) (−4) 0 3 (−2) + 4·0 + 0·5 3·1 + 4·3 + 0 (−4) 0
=
−17 19 0
−6 15 0
.
Exemplo 1.5. SejamA =
1 2 3 4
eB =
−2 1 0 3
. Ent ˜ao,
AB =
−2 7
−6 15
e BA=
1 0 9 12
.
Vamos ver no pr ´oximo exemplo como as matrizes podem ser usadas para descrever quantitativa-mente um processo de produc¸ ˜ao.
Exemplo 1.6. Uma ind ´ustria produz tr ˆes produtos, X, Y e Z, utilizando dois tipos de insumo, A e B. Para a manufatura de cada kg de X s ˜ao utilizados 1 grama do insumo A e 2 gramas do insumo B; para cada kg de Y, 1 grama de insumo A e 1 grama de insumo B e, para cada kg de Z, 1 grama de A e 4 gramas de B. Usando matrizes podemos determinar quantos gramas dos insumos A e B s ˜ao necess ´arios na produc¸ ˜ao dexkg do produto X,ykg do produto Y ezkg do produto Z.
X Y Z gramas de A/kg
gramas de B/kg
1 1 1 2 1 4
= A X =
x y z
kg de X produzidos kg de Y produzidos kg de Z produzidos
AX =
x+y+z
2x+y+ 4z
Definic¸ ˜ao 1.4. Atranspostade uma matrizA= (aij)m×n ´e definida pela matrizn×m
B =At
obtida trocando-se as linhas com as colunas, ou seja,
bij =aji,
parai= 1, . . . , nej = 1, . . . , m. Escrevemos tamb ´em[At]
ij =aji.
Exemplo 1.7. As transpostas das matrizes
A=
1 2 3 4
, B =
−2 1 0 3
e C=
1 3 0 2 4 −2
s ˜ao
At=
1 3 2 4
, Bt =
−2 0 1 3
e Ct=
1 2
3 4
0 −2
.
1.1.2
Propriedades da ´
Algebra Matricial
Teorema 1.1. SejamA,B eCmatrizes com tamanhos apropriados,αeβescalares. S ˜ao v ´alidas as seguintes propriedades para as operac¸ ˜oes matriciais:
(a) (comutatividade)A+B =B+A;
(b) (associatividade)A+ (B+C) = (A+B) +C;
(c) (elemento neutro) A matriz¯0,m×n, definida por[¯0]ij = 0, parai= 1, . . . , m,j = 1, . . . , n ´e
tal que
A+ ¯0 =A,
para toda matrizA,m×n. A matriz¯0 ´e chamadamatriz nulam×n.
(d) (elemento sim ´etrico) Para cada matrizA, existe uma ´unica matriz −A, definida por[−A]ij =
−aij tal que
A+ (−A) = ¯0.
(e) (associatividade)α(βA) = (αβ)A;
(f) (distributividade)(α+β)A=αA+βA;
(g) (distributividade)α(A+B) =αA+αB;
(i) (elemento neutro) Para cada inteiro positivopa matriz,p×p,
Ip =
1 0 . . . 0 0 1 . . . 0
..
. . . . ...
0 0 . . . 1
,
chamadamatriz identidade ´e tal que
A In=ImA =A, para toda matrizA= (aij)m×n.
(j) (distributividade)A(B+C) =AB +AC e(B+C)A=BA+CA;
(k) α(AB) = (αA)B =A(αB);
(l) (At)t=A;
(m) (A+B)t =At+Bt; (n) (αA)t=α At;
(o) (AB)t=BtAt;
(a) [A+B]ij =aij +bij =bij +aij = [B +A]ij;
(b) [A+ (B+C)]ij =aij+ [B+C]ij =aij + (bij +cij) = (aij+bij) +cij = [A+B]ij +cij = [(A+B) +C]ij;
(c) SejaX uma matrizm×ntal que
A+X =A (1.2)
para qualquer matriz A,m×n. Comparando os elementos correspondentes, temos que
aij +xij =aij,
ou seja,xij = 0, parai = 1. . . , mej = 1. . . , n. Portanto, a ´unica matriz que satisfaz (1.2) ´e
a matriz em que todos os seus elementos s ˜ao iguais a zero. Denotamos a matrizXpor ¯0. (d) Dada uma matrizA,m×n, sejaXuma matrizm×n, tal que
A+X = ¯0. (1.3)
Comparando os elementos correspondentes, temos que
aij +xij = 0,
ou seja,xij = −aij, parai = 1. . . , me j = 1. . . , n. Portanto, a ´unica matriz que satisfaz
(1.3) ´e a matriz em que todos os seus elementos s ˜ao iguais aos sim ´etricos dos elementos de
A. Denotamos a matrizXpor−A.
(f) [(α+β)A]ij = (α+β)aij = (αaij) + (βaij) = [αA]ij + [βA]ij = [αA+βA]ij.
(g) [α(A+B)]ij = α[A+B]ij =α(aij +bij) =αaij +αbij = [αA]ij + [αB]ij
= [αA+αB]ij.
(h) A demonstrac¸ ˜ao deste item ´e a mais trabalhosa. SejamA,BeCmatrizesm×p,p×qeq×n
respectivamente. A notac¸ ˜ao de somat ´orio aqui pode ser muito ´util, pelo fato de ser compacta.
[A(BC)]ij = p
X
k=1
aik[BC]kj = p
X
k=1
aik( q
X
l=1
bklclj) = p X k=1 q X l=1
aik(bklclj) =
= p X k=1 q X l=1
(aikbkl)clj = q X l=1 p X k=1
(aikbkl)clj = q X l=1 ( p X k=1
aikbkl)clj =
= q
X
l=1
[AB]ilclj = [(AB)C]ij.
(i) Podemos escrever a matriz identidade em termos do delta de Kronecker que ´e definido por
δij =
1, sei=j
0, sei6=j
como[In]ij =δij. Assim,
[AIn]ij = n
X
k=1
aik[In]kj = n
X
k=1
aikδkj =aij.
(j) [A(B+C)]ij =
X
k=1
aik[B+C]kj =
X
k=1
aik(bkj+ckj) =
X
k=1
(aikbkj +aikckj) =
= p
X
k=1
aikbkj + p
X
k=1
aikckj = [AB]ij + [AC]ij = [AB +AC]ij.
A outra igualdade ´e inteiramente an ´aloga a anterior e deixamos como exerc´ıcio.
(k) [α(AB)]ij =α p
X
k=1
aikbkj = p
X
k=1
(αaik)bkj = [(αA)B]ij e
[α(AB)]ij =α p
X
k=1
aikbkj = p
X
k=1
aik(αbkj) = [A(αB)]ij.
(l) [(At)t]
ij = [At]ji =aij.
(m) [(A+B)t]
ij = [A+B]ji =aji+bji = [At]ij + [Bt]ij.
(n) [(αA)t]ij = [αA]ji=αaji=α[At]ij = [αAt]ij.
(o) [(AB)t]
ij = [AB]ji =
p
X
k=1
ajkbki = p
X
k=1
[At]kj[Bt]ik = p
X
k=1
[Bt]ik[At]kj = [BtAt]ij.
Adiferenc¸aentre duas matrizes de mesmo tamanhoAeB ´e definida por
ou seja, ´e a soma da matrizAcom a sim ´etrica da matrizB.
SejamAuma matrizn×nepum inteiro positivo. Definimos apot ˆenciapdeA, porAp =A . . . A
| {z }
pvezes .
E parap= 0, definimosA0 =I
n.
Exemplo 1.8. Vamos verificar se para matrizesAeB, quadradas, vale a igualdade
(A+B)(A−B) =A2−B2. (1.4)
Usando a propriedade (i) do teorema anterior obtemos
(A+B)(A−B) = (A+B)A+ (A+B)(−B)
= AA+BA−AB−BB=A2+BA−AB −B2
Assim,(A+B)(A−B) =A2−B2 se, e somente se,BA−AB = 0, ou seja, se, e somente se,
AB =BA. Como o produto de matrizes n ˜ao ´e comutativo, a conclus ˜ao ´e que a igualdade (1.4),n ˜ao vale para matrizes em geral. Como contra-exemplo basta tomarmos duas matrizes que n ˜ao comutem entre si. Sejam
A =
0 0 1 1
e B =
1 0 1 0
.
Para estas matrizes
A+B =
1 0 2 1
, A−B =
−1 0 0 1
, A2 =A=
0 0 1 1
, B2 =B =
1 0 1 0 . Assim,
(A+B)(A−B) =
−1 0
−2 1
6
=
−1 0 0 1
1.1.3
Aplicac¸ ˜ao: Cadeias de Markov
Vamos supor que uma populac¸ ˜ao ´e dividida em tr ˆes estados (por exemplo: ricos, classe m ´edia e pobres) e que em cada unidade de tempo a probabilidade de mudanc¸a de um estado para outro seja constante no tempo, s ´o dependa dos estados. Este processo ´e chamadocadeia de Markov.
Seja tij a probabilidade de mudanc¸a do estado j para o estado i em uma unidade de tempo
(gerac¸ ˜ao). Tome cuidado com a ordem dos ´ındices. A matriz
T = 1
2 3
t11 t12 t13
t21 t22 t23
t31 t32 t33
1
2
3
´e chamadamatriz de transic¸ ˜ao. A distribuic¸ ˜ao da populac¸ ˜ao inicial entre os tr ˆes estados pode ser descrita pela seguinte matriz:
P0 =
p1
p2
p3
est ´a no estado 1 est ´a no estado 2 est ´a no estado 3
A matrizP0caracteriza a distribuic¸ ˜ao inicial da populac¸ ˜ao entre os tr ˆes estados e ´e chamadavetor de estado. Ap ´os uma unidade de tempo a populac¸ ˜ao estar ´a dividida entre os tr ˆes estados da seguinte forma
P1 =
t11p1+t12p2+t13p3
t21p1+t22p2+t23p3
t31p1+t32p2+t33p3
Lembre-se quetij ´e a probabilidade de mudanc¸a do estadojpara o estadoi. Assim o vetor de estado
ap ´os uma unidade de tempo ´e dada pelo produto de matrizes:
P1 =T P0. Exemplo 1.9. Vamos considerar a matriz de transic¸ ˜ao
T = 1
2 3 1 2 1 4 0 1 2 1 2 1 2 0 1 4 1 2 1
2 3 (1.5)e o vetor de estados inicial
P0 = 1 3 1 3 1 3
est ´a no estado 1 est ´a no estado 2 est ´a no estado 3
(1.6)
que representa uma populac¸ ˜ao dividida de forma que1/3da populac¸ ˜ao est ´a em cada estado. Ap ´os uma unidade de tempo a matriz de estado ser ´a dada por
P1 =T P0 = 1 2 1 4 0 1 2 1 2 1 2
0 14 12
1 3 1 3 1 3 = 1 4 1 2 1 4
Como estamos assumindo que em cada unidade de tempo a matriz de transic¸ ˜ao ´e a mesma, ent ˜ao ap ´osk unidades de tempo a populac¸ ˜ao estar ´a dividida entre os tr ˆes estados segundo a matriz de estado
Assim a matrizTkd ´a a transic¸ ˜ao entrekunidades de tempo.
Veremos naSec¸ ˜ao6.1na p ´agina405como calcular rapidamente pot ˆenciaskde matrizes e assim como determinar a distribuic¸ ˜ao da populac¸ ˜ao ap ´osk unidades de tempo parak um inteiro positivo qualquer.
Exerc´ıcios Num ´ericos
(respostas na p ´agina
501)
1.1.1. Considere as seguintes matrizes
A=
2 0 6 7
, B =
0 4 2 −8
, C =
−6 9 −7 7 −3 −2
D =
−6 4 0 1 1 4
−6 0 6
, E =
6 9 −9
−1 0 −4
−6 0 −1
Se for poss´ıvel calcule:
(a) AB −BA, (b) 2C−D, (c) (2Dt−3Et)t,
1.1.2. Conhecendo-se somente os produtosAB e AC, como podemos calcularA(B +C), BtAt,
CtAte(ABA)C?
1.1.3. Considere as seguintes matrizes
A=
−3 2 1
1 2 −1
, B =
2 −1 2 0 0 3 C =
−2 1 −1 0 1 1
−1 0 1
, D=
d1 0 0
0 d2 0
0 0 d3
E1 = 1 0 0
, E2 = 0 1 0
, E3 = 0 0 1 Verifique que:
(a) AB ´e diferente deBA.
(b) AEj ´e a j- ´esima coluna de A, para j = 1,2,3 e EitB ´e a i- ´esima linha de B, para
i= 1,2,3(o caso geral est ´a noExerc´ıcio1.1.16na p ´agina26).
(c) CD = [ d1C1 d2C2 d3C3 ], em queC1 = −2 0 −1
,C2 = 1 1 0
eC3 = −1 1 1
, s ˜ao as
(d) DC =
d1C1
d2C2
d3C3
, em que C1 =
−2 1 −1 , C2 =
0 1 1 e
C3 =
−1 0 1 s ˜ao as linhas de C (o caso geral est ´a noExerc´ıcio 1.1.17 (b) na p ´agina27).
(e) Escrevendo B em termos das suas colunas, B = [ B1 B2 ], em que B1 = 2 2 0 e
B2 = −1 0 3
, o produtoAB pode ser escrito comoAB = A[B1 B2 ] = [AB1 AB2 ] (o caso geral est ´a noExerc´ıcio1.1.18(a) na p ´agina28).
(f) escrevendoAem termos das suas linhas,A1 =
−3 2 1 eA2 =
1 2 −1 , o produtoAB pode ser escrito como AB =
A1 A2 B =
A1B
A2B
(o caso geral est ´a no
Exerc´ıcio1.1.18(b) na p ´agina28).
1.1.4. Sejam
A =
1 −3 0 0 4 −2
e X =
x y z .
Verifique quexA1+yA2+zA3 =AX, em queAj ´e aj- ´esima coluna deA, paraj = 1,2,3
1.1.5. Encontre um valor dextal queABt= 0, em que
A= x 4 −2 e B = 2 −3 5 .
1.1.6. Mostre que as matrizesA =
1 1y
y 1
, em que y ´e uma n ´umero real n ˜ao nulo, verificam a equac¸ ˜aoX2 = 2X.
1.1.7. Mostre que seAeB s ˜ao matrizes que comutam com a matrizM =
0 1
−1 0
, ent ˜aoAB =
BA.
1.1.8. (a) Determine todas as matrizesA,2×2,diagonais(os elementos que est ˜ao fora da diagonal s ˜ao iguais a zero) que comutam com toda matrizB,2×2, ou seja, tais queAB =BA, para toda matrizB,2×2.
(b) Determine todas as matrizesA, 2×2, que comutam com toda matrizB, 2×2, ou seja, tais queAB =BA, para toda matrizB,2×2.
1.1.9. Verifique queA3 = ¯0, para
A=
0 1 0 0 0 1 0 0 0
.
O caso geral est ´a noExerc´ıcio1.1.29na p ´agina32.
Uma vez inicializado o MATLABr, aparecer ´a na janela de comandos um prompt>> ouEDU>>. O prompt significa que o MATLABr est ´a esperando um comando. Todo comando deve ser finalizado teclando-se Enter. Comandos que foram dados anteriormente podem ser obtidos novamente usando as teclas↑e ↓. Enquanto se estiver escrevendo um comando, este pode ser corrigido usando as teclas←, →, Deletee Backspace. O MATLABr faz diferenc¸a entre letras mai ´usculas e min ´usculas.
No MATLABr, pode-se obter ajuda sobre qualquer comando ou func¸ ˜ao. O comando >> help
(sem o prompt >>) mostra uma listagem de todos os pacotes dispon´ıveis. Ajuda sobre um pacote espec´ıfico ou sobre um comando ou func¸ ˜ao espec´ıfica pode ser obtida com o comando >> help nome,
(sem a v´ırgula e sem o prompt>>) em quenomepode ser o nome de um pacote ou o nome de um comando ou func¸ ˜ao.
Al ´em dos comandos e func¸ ˜oes pr ´e-definidas, escrevemos um pacote chamado gaal com func¸ ˜oes espec´ıficas para a aprendizagem de Geometria Anal´ıtica e ´Algebra Li-near. Este pacote pode ser obtido gratuitamente atrav ´es da internet no enderec¸o http://www.mat.ufmg.br/~regi, assim como um texto com uma introduc¸ ˜ao ao MATLABre instruc¸ ˜oes de como instalar o pacotegaal. Depois deste pacote ser devidamente instalado, o comandohelp gaalno prompt do MATLABrd ´a informac¸ ˜oes sobre este pacote.
Mais informac¸ ˜oes sobre as capacidades do MATLABrpodem ser obtidas em [4,28].
Vamos descrever aqui alguns comandos que podem ser usados para a manipulac¸ ˜ao de matri-zes. Outros comandos ser ˜ao introduzidos a medida que forem necess ´arios.
>> A=[a11,a12,...,a1n;a21,a22,...; ...,amn] cria uma matriz, m por n, usando os elementosa11, a12, ..., amn e a armazena numa vari ´avel de nome A. Por exemplo, >>
A=[1,2,3;4,5,6]cria a matrizA=
1 2 3 4 5 6
;
>> I=eye(n)cria a matriz identidadenporne a armazena numa vari ´avelI;
>> O=zeros(n)ou>> O=zeros(m,n)cria a matriz nulanpornoumporn, respectivamente, e a armazena numa vari ´avelO;
>> A+B ´e a soma deAeB, >> A*B ´e o produto deAporB, >> A.’ ´e a transposta deA,
>> A-B ´e a diferenc¸aAmenosB,
>> num*A ´e o produto do escalarnumporA, >> A^k ´e a pot ˆenciaAelevado ak.
>> A(:,j) ´e a colunaj da matrizA,>> A(i,:) ´e a linhaida matrizA.
>> diag([d1,...,dn])cria uma matriz diagonal, cujos elementos da diagonal s ˜ao iguais aos elementos da matriz[d1,...,dn], ou seja, s ˜aod1,...,dn.
>> A=sym(A) converte a matriz A numa matriz em que os elementos s ˜ao armazenados no formato simb ´olico. A func¸ ˜aonumericfaz o processo inverso.
>> solve(expr) determina a soluc¸ ˜ao da equac¸ ˜ao expr=0. Por exemplo, >> solve(x^2-4)determina as soluc¸ ˜oes da equac¸ ˜aox2−4 = 0;
Comando do pacote GAAL:
>> A=randi(n) ou >> A=randi(m,n)cria uma matriz npor n oum por n, respectivamente, com elementos inteiros aleat ´orios entre−5e5.
1.1.10. Use o MATLABrpara calcular alguns membros da seq ¨u ˆenciaA, A2, . . . , Ak, . . ., para
(a) A=
1 12 0 13
; (b) A =
1 2
1 3
0 −15
A seq ¨u ˆencia parece estar convergindo para alguma matriz? Se estiver, para qual?
1.1.11. Calcule as pot ˆencias das matrizes dadas a seguir e encontre experimentalmente (por tentativa!) o menor inteirok > 1tal que (use o comando>> A=sym(A) depois de armazenar a matriz na vari ´avelA):
(a) Ak =I
3, em que
A =
0 0 1 1 0 0 0 1 0
;
(b) Ak =I
4, em que
A =
0 1 0 0
−1 0 0 0 0 0 0 1 0 0 1 0
;
(c) Ak = ¯0, em que
A =
0 1 0 0 0 0 1 0 0 0 0 1 0 0 0 0
.
1.1.12. Vamos fazer um experimento no MATLABrpara tentar ter uma id ´eia do qu ˜ao comum ´e encontrar matrizes cujo produto comuta. No prompt do MATLABrdigite a seguinte linha:
(n ˜ao esquec¸a das v´ırgulas e pontos e v´ırgulas!). O que esta linha est ´a mandando o MATLABr fazer ´e o seguinte:
• Criar um contadorce atribuir a ele o valor zero.
• Atribuir `as vari ´aveisAeB,1000matrizes3×3com entradas inteiras e aleat ´orias entre−5
e5.
• SeAB=BA, ou seja,AeBcomutarem, ent ˜ao o contadorc ´e acrescido de1. • No final o valor existente na vari ´avelc ´e escrito.
Qual a conclus ˜ao que voc ˆe tira do valor obtido na vari ´avelc?
1.1.13. Fac¸a um experimento semelhante ao anterior, mas para o caso em que cada uma das matrizes ´ediagonal, isto ´e, os elementos que est ˜ao fora da diagonal s ˜ao iguais a zero. Use a seta para cima↑para obter novamente a linha digitada e edite a linha no prompt do MATLABrde forma a obter algo semelhante `a linha:
>> c=0; for n=1:1000,A=diag(randi(1,3));B=diag(randi(1,3));if( ....
Qual a conclus ˜ao que voc ˆe tira do valor obtido na vari ´avelc?
1.1.14. Fac¸a um experimento semelhante ao anterior, mas para o caso em que uma das matrizes ´e diagonal. Use a seta para cima ↑ para obter novamente a linha digitada e edite a linha no prompt do MATLABrde forma a obter a seguinte linha:
>> c=0; for n=1:1000,A=diag(randi(1,3));B=randi(3);if(A*B==B*A),c=c+1;A,B,end,end,c
1.1.15. Use o MATLABrpara resolver osExerc´ıcios Num ´ericos.
Exerc´ıcios Te ´oricos
1.1.16. SejamE1 = 1 0 0 .. . 0
, E2 = 0 1 0 .. . 0
,. . . ,En =
0 0 .. . 0 1
matrizesn×1.
(a) Mostre que se
A =
a11 a12 . . . a1n
a21 a22 . . . a2n
..
. . . . ...
am1 am2 . . . amn
´e uma matrizm×n, ent ˜aoAEj ´e igual `a colunajda matrizA.
(b) Mostre que se
B =
b11 b12 . . . b1m
b21 b22 . . . b2m
..
. . . . ...
bn1 bn2 . . . bnm
,
´e uma matrizn×ment ˜aoEt
1.1.17. Seja
D=
λ1 0 . . . 0
0 λ2 . . . 0 ..
. . .. ...
0 . . . 0 λn
umamatriz diagonaln×n, isto ´e, os elementos que est ˜ao fora da diagonal s ˜ao iguais a zero. Seja
A =
a11 a12 . . . a1n
a21 a22 . . . a2n
..
. . . . ...
an1 an2 . . . ann
.
(a) Mostre que o produtoAD ´e obtido da matrizAmultiplicando-se cada colunaj porλj, ou
seja, seA= [A1 A2 . . . An ], em queAj =
a1j
.. .
anj
´e a colunaj deA, ent ˜ao
AD= [λ1A1 λ2A2 . . . λnAn].
seja, seA=
A1
A2 .. .
An
, em queAi = [ai1 . . . ain ] ´e a linhaideA, ent ˜ao
DA=
λ1A1
λ2A2 .. .
λnAn
.
1.1.18. SejamAeB matrizesm×pep×n, respectivamente.
(a) Mostre que a j- ´esima coluna do produto AB ´e igual ao produto ABj, em que Bj =
b1j
.. .
bpj
´e aj- ´esima coluna deB, ou seja, seB = [B1 . . . Bn ], ent ˜ao
AB =A[B1 . . . Bn] = [ AB1 . . . ABn ];
[ai1 . . . aip] ´e ai- ´esima linha deA, ou seja, seA= A1 A2 .. . Am
, ent ˜ao
AB = A1 A2 .. . Am B =
A1B
A2B .. .
AmB
.
1.1.19. Seja A uma matriz m × n e X =
x1 .. . xn
uma matriz n × 1. Prove que
AX = n
X
j=1
xjAj, em queAj ´e aj- ´esima coluna deA. (Sugest ˜ao: Desenvolva o lado direito e
chegue ao lado esquerdo.)
1.1.20. (a) Mostre que seA ´e uma matrizm×ntal queAX = ¯0, para toda matrizX,n×1, ent ˜ao
A= ¯0. (Sugest ˜ao: use oExerc´ıcio16na p ´agina26.)
(b) SejamB eC matrizesm×n, taisBX =CX, para todoX, n×1. Mostre queB =C. (Sugest ˜ao: use o item anterior.)
1.1.21. Mostre que a matriz identidade In ´e a ´unica matriz tal que A In = InA = A para qualquer
matriz A, n × n. (Sugest ˜ao: Seja Jn uma matriz tal que A Jn = JnA = A. Mostre que
1.1.22. SeAB =BAep ´e um inteiro positivo, mostre que(AB)p =ApBp.
1.1.23. SejamA, B eCmatrizesn×n.
(a) (A+B)2 =A2+ 2AB +B2? E seAB =BA? Justifique. (b) (AB)C =C(AB)? E seAC =CAeBC =CB? Justifique. (Sugest ˜ao: Veja oExemplo1.8na p ´agina15.)
1.1.24. (a) SeAeB s ˜ao duas matrizes tais queAB = ¯0, ent ˜aoA= ¯0ouB = ¯0? Justifique. (b) SeAB = ¯0, ent ˜aoBA= ¯0? Justifique.
(c) SeA ´e uma matriz tal queA2 = ¯0, ent ˜aoA= ¯0? Justifique.
1.1.25. Dizemos que uma matrizA,n×n, ´esim ´etricaseAt=Ae ´eanti-sim ´etricaseAt=−A.
(a) Mostre que se A ´e sim ´etrica, ent ˜ao aij = aji, para i, j = 1, . . . n e que se A ´e
anti-sim ´etrica, ent ˜ao aij = −aji, para i, j = 1, . . . n. Portanto, os elementos da diagonal
principal de uma matriz anti-sim ´etrica s ˜ao iguais a zero.
(b) Mostre que seAeBs ˜ao sim ´etricas, ent ˜aoA+B eαAs ˜ao sim ´etricas, para todo escalar
α.
(c) Mostre que seAeB s ˜ao sim ´etricas, ent ˜aoAB ´e sim ´etrica se, e somente se,AB =BA. (d) Mostre que seAeBs ˜ao anti-sim ´etricas, ent ˜aoA+BeαAs ˜ao anti-sim ´etricas, para todo
escalarα.
(f) Mostre que toda matriz quadradaApode ser escrita como a soma de uma matriz sim ´etrica e uma anti-sim ´etrica. (Sugest ˜ao: Observe o resultado da soma deA+AtcomA−At.)
1.1.26. Para matrizes quadradasA = (aij)n×ndefinimos o trac¸o deA como sendo a soma dos
ele-mentos da diagonal (principal) deA, ou seja,tr(A) = n
X
i=1
aii.
(a) Mostre quetr(A+B) = tr(A) + tr(B). (b) Mostre quetr(αA) = αtr(A).
(c) Mostre quetr(At) = tr(A).
(d) Mostre quetr(AB) = tr(BA). (Sugest ˜ao: Prove inicialmente para matrizes2×2.) 1.1.27. SejaAuma matrizn×n. Mostre que seAAt= ¯0, ent ˜aoA= ¯0. (Sugest ˜ao: use o trac¸o.) E se
a matrizAform×n, comm6=n?
1.1.28. J ´a vimos que o produto de matrizes n ˜ao ´e comutativo. Entretanto, certos conjuntos de matrizes s ˜ao comutativos. Mostre que:
(a) SeD1 eD2s ˜ao matrizes diagonaisn×n, ent ˜aoD1D2 =D2D1. (b) SeA ´e uma matrizn×ne
B =a0In+a1A+a2A2+. . .+akAk,
1.1.29. Uma matrizA ´e chamadanilpotenteseAk = ¯0, para algum inteiro positivok. Verifique que a
matriz
A=
0 1 0 · · · 0 0 0 1 · · · 0
..
. ... . .. ... ...
0 0 0 · · · 1 0 0 0 · · · 0
n×n
,
Ap ˆendice I: Notac¸ ˜ao de Somat ´orio
S ˜ao v ´alidas algumas propriedades para a notac¸ ˜ao de somat ´orio:
(a) O ´ındice do somat ´orio ´e uma vari ´avel muda que pode ser substitu´ıda por qualquer letra:
n
X
i=1
fi = n
X
j=1
fj.
(b) O somat ´orio de uma soma pode ser escrito como uma soma de dois somat ´orios:
n
X
i=1
(fi+gi) = n
X
i=1
fi+ n
X
i=1
gi.
Pois,
n
X
i=1
(fi+gi) = (f1+g1) +. . .+ (fn+gn) = (f1+. . .+fn) + (g1+. . .+gn) = n
X
i=1
fi+ n
X
i=1
gi.
Aqui foram aplicadas as propriedades associativa e comutativa da soma de n ´umeros.
(c) Se no termo geral do somat ´orio aparece um produto, em que um fator n ˜ao depende do ´ındice do somat ´orio, ent ˜ao este fator pode “sair” do somat ´orio:
n
X
i=1
figk =gk n
X
i=1
fi.
Pois,
n
X
i=1
figk = f1gk +. . .+fngk = gk(f1 +. . . +fn) = gk n
X
i=1
fi. Aqui foram aplicadas as
(d) Num somat ´orio duplo, a ordem dos somat ´orios pode ser trocada:
n
X
i=1
m
X
j=1
fij = m
X
j=1
n
X
i=1
fij.
Pois,
n
X
i=1
m
X
j=1
fij = n
X
i=1
(fi1+. . .+fim) = (f11+. . .+f1m) +. . .+ (fn1+. . .+fnm) = (f11+. . .+
fn1) +. . .+ (f1m+. . .+fnm) = m
X
j=1
(f1j +. . .+fnj) = m
X
j=1
n
X
i=1
fij. Aqui foram aplicadas as
1.2
Sistemas de Equac¸ ˜oes Lineares
Muitos problemas em v ´arias ´areas da Ci ˆencia recaem na soluc¸ ˜ao de sistemas lineares. Vamos ver como a ´algebra matricial pode simplificar o estudo dos sistemas lineares.
Umaequac¸ ˜ao linearemnvari ´aveisx1, x2, . . . , xn ´e uma equac¸ ˜ao da forma
a1x1+a2x2+. . .+anxn =b ,
em quea1, a2, . . . , aneb s ˜ao constantes reais;
Umsistema de equac¸ ˜oes linearesou simplesmentesistema linear ´e um conjunto de equac¸ ˜oes lineares, ou seja, ´e um conjunto de equac¸ ˜oes da forma
a11x1 + a12x2 + . . . + a1nxn = b1
a21x1 + a22x2 + . . . + a2nxn = b2 ..
. ... = ...
am1x1 + am2x2 + . . . + amnxn = bm
em queaij ebk s ˜ao constantes reais, parai, k= 1, . . . , mej = 1, . . . , n.
Usando o produto de matrizes que definimos na sec¸ ˜ao anterior, o sistema linear acima pode ser escrito como uma equac¸ ˜ao matricial
em que A=
a11 a12 . . . a1n
a21 a22 . . . a2n
..
. . . . ...
am1 am2 . . . amn
, X =
x1 x2 .. . xn
e B =
b1 b2 .. . bm .
Umasoluc¸ ˜aode um sistema linear ´e uma matrizS =
s1 s2 .. . sn
tal que as equac¸ ˜oes do sistema s ˜ao
satisfeitas quando substitu´ımosx1 =s1, x2 = s2, . . . , xn = sn. O conjunto de todas as soluc¸ ˜oes do
sistema ´e chamadoconjunto soluc¸ ˜ao ousoluc¸ ˜ao geraldo sistema. A matrizA ´e chamadamatriz do sistema linear.
Exemplo 1.10. O sistema linear de duas equac¸ ˜oes e duas inc ´ognitas
x + 2y = 1 2x + y = 0
pode ser escrito como
1 2 2 1 x y = 1 0 .
A soluc¸ ˜ao (geral) do sistema acima ´ex=−1/3ey= 2/3(verifique!) ou
X =
−13
2 3
Uma forma de resolver um sistema linear ´e substituir o sistema inicial por outro que tenha o mesmo conjunto soluc¸ ˜ao do primeiro, mas que seja mais f ´acil de resolver. O outro sistema ´e obtido depois de aplicar sucessivamente uma s ´erie de operac¸ ˜oes, que n ˜ao alteram a soluc¸ ˜ao do sistema, sobre as equac¸ ˜oes. As operac¸ ˜oes que s ˜ao usadas s ˜ao:
• Trocar a posic¸ ˜ao de duas equac¸ ˜oes do sistema;
• Multiplicar uma equac¸ ˜ao por um escalar diferente de zero;
• Somar a uma equac¸ ˜ao outra equac¸ ˜ao multiplicada por um escalar.
Estas operac¸ ˜oes s ˜ao chamadas deoperac¸ ˜oes elementares. Quando aplicamos operac¸ ˜oes ele-mentares sobre as equac¸ ˜oes de um sistema linear somente os coeficientes do sistema s ˜ao alterados, assim podemos aplicar as operac¸ ˜oes sobre a matriz de coeficientes do sistema, que chamamos de matriz aumentada, ou seja, a matriz
[A|B] =
a11 a12 . . . a1n b1
a21 a22 . . . a2n b2 ..
. . . . ... ...
am1 am2 . . . amn bm
Definic¸ ˜ao 1.5. Uma operac¸ ˜ao elementar sobre as linhas de uma matriz ´e uma das seguintes operac¸ ˜oes:
(a) Trocar a posic¸ ˜ao de duas linhas da matriz;
(b) Multiplicar uma linha da matriz por um escalar diferente de zero;
(c) Somar a uma linha da matriz um m ´ultiplo escalar de outra linha.
O pr ´oximo teorema garante que ao aplicarmos operac¸ ˜oes elementares `as equac¸ ˜oes de um sis-tema o conjunto soluc¸ ˜ao n ˜ao ´e alterado.
Teorema 1.2. Se dois sistemas lineares AX = B e CX = D, s ˜ao tais que a matriz aumentada
[C |D] ´e obtida de[A | B]aplicando-se uma operac¸ ˜ao elementar, ent ˜ao os dois sistemas possuem as mesmas soluc¸ ˜oes.
Demonstrac¸˜ao. A demonstrac¸ ˜ao deste teorema segue-se de duas observac¸ ˜oes:
(b) Se o sistema CX = D, ´e obtido de AX = B aplicando-se uma operac¸ ˜ao elementar `as suas equac¸ ˜oes (ou equivalentemente `as linhas da sua matriz aumentada), ent ˜ao o sistema
AX =B tamb ´em pode ser obtido deCX =Daplicando-se uma operac¸ ˜ao elementar `as suas equac¸ ˜oes, pois cada operac¸ ˜ao elementar possui uma operac¸ ˜ao elementar inversa do mesmo tipo, que desfaz o que a anterior fez (verifique!).
Pela observac¸˜ao (b),AX =BeCX =Dpodem ser obtidos um do outro aplicando-se uma operac¸ ˜ao elementar sobre as suas equac¸ ˜oes. E pela observac¸ ˜ao (a), os dois possuem as mesmas soluc¸ ˜oes.
Dois sistemas que possuem o mesmo conjunto soluc¸ ˜ao s ˜ao chamadossistemas equivalentes. Portanto, segue-se do Teorema 1.2 que aplicando-se operac¸ ˜oes elementares `as equac¸ ˜oes de um sistema linear obtemos sistemas equivalentes.
1.2.1
M ´etodo de Gauss-Jordan
O m ´etodo que vamos usar para resolver sistemas lineares consiste na aplicac¸ ˜ao de operac¸ ˜oes elementares `as linhas da matriz aumentada do sistema at ´e que obtenhamos uma matriz numa forma em que o sistema associado a esta matriz seja de f ´acil resoluc¸ ˜ao.
Exemplo 1.11. Uma ind ´ustria produz tr ˆes produtos, X, Y e Z, utilizando dois tipos de insumo, A e B. Para a manufatura de cada kg de X s ˜ao utilizados 1 grama do insumo A e 2 gramas do insumo B; para cada kg de Y, 1 grama de insumo A e 1 grama de insumo B e, para cada kg de Z, 1 grama de A e 4 gramas de B. O prec¸o de venda do kg de cada um dos produtos X, Y e Z ´e R$ 2,00, R$ 3,00 e R$ 5,00, respectivamente. Com a venda de toda a produc¸ ˜ao de X, Y e Z manufaturada com 1 kg de A e 2 kg de B, essa ind ´ustria arrecadou R$ 2500,00. Vamos determinar quantos kg de cada um dos produtos X, Y e Z foram vendidos. Como vimos noExemplo1.6na p ´agina 8, usando matrizes o esquema de produc¸ ˜ao pode ser descrito da seguinte forma:
X Y Z gramas de A/kg
gramas de B/kg prec¸o/kg
1 1 1 2 1 4 2 3 5
= A X =
x y z
kg de X produzidos kg de Y produzidos kg de Z produzidos
AX =
x+y+z
2x+y+ 4z
2x+ 3y+ 5z
= 1000 2000 2500
gramas de A usados gramas de B usados arrecadac¸ ˜ao
Assim precisamos resolver o sistema linear
x + y + z = 1000 2x + y + 4z = 2000 2x + 3y + 5z = 2500
cuja matriz aumentada ´e
1
1 1 1000 2 1 4 2000 2 3 5 2500
1a.eliminac¸ ˜ao:
Vamos procurar para piv ˆo da 1a.linha um elemento n ˜ao nulo da primeira coluna n ˜ao nula (se for o caso, podemos usar a troca de linhas para “traz ˆe-lo” para a primeira linha). Como o primeiro elemento da primeira coluna ´e igual a1ele ser ´a o primeiro piv ˆo. Agora, precisamos “zerar” os outros elementos da 1a.coluna, que ´e a coluna do piv ˆo, para isto, adicionamos `a 2a.linha,−2vezes a 1a.linha e adicionamos
`a 3a.linha, tamb ´em,−2vezes a 1a. linha. −2×1a.linha+2a.linha−→2a.linha −2×1a.linha+3a.linha−→3a.linha
1 1 1 1000 0
−1 2 0 0 1 3 500
2a.eliminac¸ ˜ao:
Olhamos para a sub-matriz obtida eliminando-se a 1a. linha. Escolhemos para piv ˆo um elemento diferente de zero na 1a.coluna n ˜ao nula desta sub-matriz. Vamos escolher o elemento de posic¸ ˜ao 2,2. Como temos que “fazer” o piv ˆo igual a um, vamos multiplicar a 2a. linha por−1.
−1×2a.linha−→2a.linha
1 1 1 1000 0 1 −2 0 0 1 3 500
Agora, precisamos “zerar” os outros elementos da 2a.coluna, que ´e a coluna do piv ˆo, para isto, soma-mos `a 1a.linha,−1vezes a 2a.e somamos `a 3a.linha, tamb ´em,−1vezes a 2a..
−1×2a.linha+1a.linha−→1a.linha −1×2a.linha+3a.linha−→3a.linha
1 0 3 1000 0 1 −2 0 0 0
5 500
Olhamos para a sub-matriz obtida eliminando-se a 1a.e a 2a.linha. Escolhemos para piv ˆo um elemento diferente de zero na 1a. coluna n ˜ao nula desta sub-matriz. Temos de escolher o elemento de posic¸ ˜ao 3,3 e como temos de “fazer” o piv ˆo igual a1, vamos multiplicar a 3a.linha por1/5.
1
5×3a.linha−→3a.linha
1 0 3 1000 0 1 −2 0 0 0 1 100
Agora, precisamos “zerar” os outros elementos da 3a.coluna, que ´e a coluna do piv ˆo, para isto, soma-mos `a 1a.linha,−3vezes a 3a.e somamos `a 2a.linha,2vezes a 2a..
−3×3a.linha+1a.linha−→1a.linha
2×3a.linha+2a.linha−→2a.linha
1 0 0 700 0 1 0 200 0 0 1 100
Portanto o sistema dado ´e equivalente ao sistema
x = 700
y = 200
z = 100
que possui soluc¸ ˜ao geral dada por
X =
x y z
=
700 200 100
.
A ´ultima matriz que obtivemos no exemplo anterior est ´a na forma que chamamos deescalonada reduzida.
Definic¸ ˜ao 1.6. Uma matriz A = (aij)m×n est ´a na forma escalonada reduzida quando satisfaz as
seguintes condic¸ ˜oes:
(a) Todas as linhas nulas (formadas inteiramente por zeros) ocorrem abaixo das linhas n ˜ao nulas;
(b) Opiv ˆo(1o.elemento n ˜ao nulo de uma linha) de cada linha n ˜ao nula ´e igual a1;
(c) O piv ˆo de cada linha n ˜ao nula ocorre `a direita do piv ˆo da linha anterior.
(d) Se uma coluna cont ´em um piv ˆo, ent ˜ao todos os seus outros elementos s ˜ao iguais a zero.
Se uma matriz satisfaz as propriedades (a) e (c), mas n ˜ao necessariamente (b) e (d), dizemos que ela est ´a na formaescalonada.
Exemplo 1.12. As matrizes
1 0 0 0 1 0 0 0 1
e
1 3 0 2
0 0 1 −3
0 0 0 0
s ˜ao escalonadas reduzidas, enquanto
1 1 1 0 −1 2 0 0 5
e
1 3 −1 5 0 0 −5 15
0 0 0 0
s ˜ao escalonadas, masn ˜aos ˜ao escalonadas reduzidas.
Este m ´etodo de resoluc¸ ˜ao de sistemas, que consiste em aplicar operac¸ ˜oes elementares `as linhas da matriz aumentada at ´e que a matriz do sistema esteja na forma escalonada reduzida, ´e conhecido comom ´etodo de Gauss-Jordan.
Exemplo 1.13. Considere o seguinte sistema
x + 3y + 13z = 9
y + 5z = 2
−2y − 10z = −8
A sua matriz aumentada ´e
1
3 13 90 1 5 2
0 −2 −10 −8
1a.eliminac¸ ˜ao:
Como o piv ˆo da 1a.linha ´e igual a1e os outros elementos da 1a.coluna s ˜ao iguais a zero, n ˜ao h ´a nada o que fazer na 1a.eliminac¸ ˜ao.
1 3 13 9
0
1 5 20 −2 −10 −8
2a.eliminac¸ ˜ao:
Olhamos para submatriz obtida eliminando-se a 1a. linha. Escolhemos para piv ˆo um elemento n ˜ao nulo da 1a.coluna n ˜ao nula da submatriz. Escolhemos o elemento de posic¸ ˜ao 2,2. Como ele ´e igual a
1, precisamos, agora, “zerar” os outros elementos da coluna do piv ˆo. Para isto somamos `a 1a. linha, −3vezes a 2a. e somamos `a 3a.linha,2vezes a 2a..
−3×2a. linha+1a. linha−→1a.linha
2×2a.linha+3a.linha−→3a.linha
1 0 −2 3
0 1 5 2
0 0 0 −4
Portanto o sistema dado ´e equivalente ao sistema
x − 2z = 3
y + 5z = 2 0 = −4
quen ˜aopossui soluc¸ ˜ao.
Em geral, um sistema linear n ˜ao tem soluc¸ ˜ao se, e somente se, a ´ultima linha n ˜ao nula da forma escalonada reduzida da sua matriz aumentada for da forma[ 0 . . . 0|b′
m], comb′m 6= 0.
Exemplo 1.14. Considere o seguinte sistema
3z − 9w = 6 5x + 15y − 10z + 40w = −45
A sua matriz aumentada ´e
0 0 3 −9 6
5 15 −10 40 −45 1
3 −1 5 −7
1a.eliminac¸ ˜ao:
Como temos que “fazer” o piv ˆo igual a um, escolhemos para piv ˆo o elemento de posic¸ ˜ao 3,1. Preci-samos “coloc ´a-lo” na primeira linha, para isto, trocamos a 3a.linha com a 1a. .
1a.linha←→4a.linha
1
3 −1 5 −75 15 −10 40 −45
0 0 3 −9 6
Agora, precisamos “zerar” os outros elementos da 1a.coluna, que ´e a coluna do piv ˆo, para isto, adici-onamos `a 2a.linha,−5vezes a 1a..
−5×1a. linha+2a.linha−→2a.linha
1 3 −1 5 −7 0 0
−5 15 −10 0 0 3 −9 6
2a.eliminac¸ ˜ao:
−(1/5)×2a.linha−→2a.linha
1 3 −1 5 −7 0 0
1 −3 2 0 0 3 −9 6
Agora, precisamos “zerar” os outros elementos da 2a.coluna, que ´e a coluna do piv ˆo, para isto, adici-onamos `a 1a.linha a 2a. e `a 4a. linha,−3vezes a 2a..
2a.linha+1a.linha−→1a.linha −3×2a. linha+4a. linha−→4a.linha
1 3 0 2 −5 0 0 1 −3 2
0 0 0 0 0
Esta matriz ´e escalonada reduzida. Portanto o sistema dado ´e equivalente ao sistema seguinte
x + 3y + 2w = −5
z − 3w = 2.
A matriz deste sistema possui duas colunas sem piv ˆos. As vari ´aveis que n ˜ao est ˜ao associadas a piv ˆos podem ser consideradasvari ´aveis livres, isto ´e, podem assumir valores arbitr ´arios. Neste exemplo as vari ´aveisyewn ˜ao est ˜ao associadas a piv ˆos e podem ser consideradas vari ´aveis livres. Sejamw = α ey = β. As vari ´aveis associadas aos piv ˆos ter ˜ao os seus valores dependentes das vari ´aveis livres,z = 2 + 3α,x=−5−2α−3β. Assim, a soluc¸ ˜ao geral do sistema ´e
X =
x y z w
=
−5−2α−3β β
2 + 3α α
Em geral, se o sistema linear tiver soluc¸ ˜ao e a forma escalonada reduzida da matriz aumentada possuir colunas sem piv ˆos, as vari ´aveis quen ˜aoest ˜ao associadas a piv ˆos podem ser consideradas vari ´aveis livres, isto ´e, podem assumir valores arbitr ´arios. As vari ´aveis associadas aos piv ˆos ter ˜ao os seus valores dependentes das vari ´aveis livres.
Lembramos que o sistema linear n ˜ao tem soluc¸ ˜ao se a ´ultima linha n ˜ao nula da forma escalonada reduzida da matriz aumentada do sistema for da forma[ 0. . . 0|b′
m], comb′m 6= 0, como noExemplo
1.13na p ´agina44.
Observac¸ ˜ao. Para se encontrar a soluc¸ ˜ao de um sistema linear n ˜ao ´e necess ´ario transformar a matriz aumentada do sistema na sua forma escalonada reduzida, mas se a matriz est ´a nesta forma, o sistema associado ´e o mais simples poss´ıvel. Um outro m ´etodo de resolver sistemas lineares consiste em, atrav ´es da aplicac¸ ˜ao de operac¸ ˜oes elementares `a matriz aumentada do sistema, se chegar a uma matriz que ´e somenteescalonada (isto ´e, uma matriz que satisfaz as condic¸ ˜oes(a)e (c), mas n ˜ao necessariamente(b)e(d)daDefinic¸ ˜ao1.6). Este m ´etodo ´e conhecido comom ´etodo de Gauss.
O pr ´oximo resultado mostra que um sistema linear que tenha mais de uma soluc¸ ˜ao n ˜ao pode ter um n ´umero finito de soluc¸ ˜oes.
Proposic¸ ˜ao 1.3. SejamAuma matrizm×neB uma matrizm×1. Se o sistema linearA X =B
Demonstrac¸˜ao. Seja
Xλ = (1−λ)X0 +λX1, paraλ∈R.
Vamos mostrar que Xλ ´e soluc¸ ˜ao do sistema A X = B, para qualquer λ ∈ R. Para isto vamos
mostrar queA Xλ =B.
Aplicando as propriedades (i), (j) das operac¸ ˜oes matriciais (Teorema1.1na p ´agina10) obtemos
A Xλ =A[(1−λ)X0+λX1] =A(1−λ)X0+AλX1 = (1−λ)A X0+λA X1
ComoX0eX1 s ˜ao soluc¸ ˜oes deA X =B, ent ˜aoA X0 =BeA X1 =B, portanto
A Xλ = (1−λ)B+λB= [(1−λ) +λ]B =B,
pela propriedade (f) doTeorema1.1.
Assim o sistemaA X =B tem infinitas soluc¸ ˜oes, pois para todo valor deλ∈ R,Xλ ´e soluc¸ ˜ao e
Xλ−Xλ′ = (λ−λ′)(X1−X0), ou seja,Xλ 6=Xλ′, paraλ6=λ′. Observe que paraλ= 0,Xλ =X0,
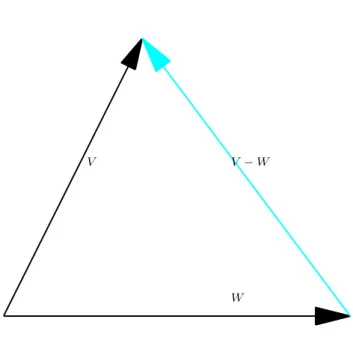
paraλ = 1, Xλ = X1, para λ = 1/2, Xλ = 12X0 + 12X1, para λ = 3, Xλ = −2X0 + 3X1 e para
λ=−2,Xλ = 3X0−2X1.
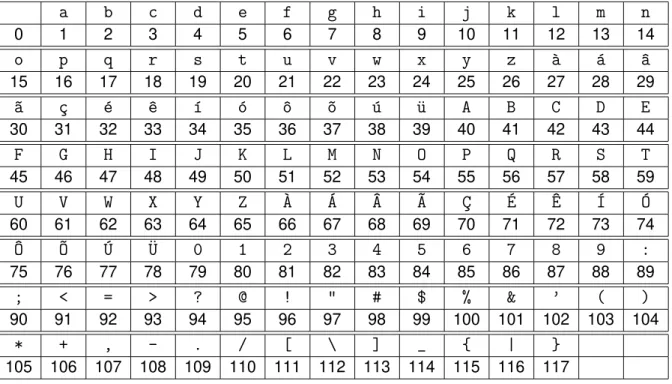
NoExemplo3.4na p ´agina168temos uma interpretac¸ ˜ao geom ´etrica desta demonstrac¸ ˜ao.
1.2.2
Matrizes Equivalentes por Linhas
Definic¸ ˜ao 1.7. Uma matrizA = (aij)m×n ´eequivalente por linhasa uma matrizB = (bij)m×n, se
Bpode ser obtida deAaplicando-se uma seq ¨u ˆencia de operac¸ ˜oes elementares sobre as suas linhas.
Exemplo 1.15. Observando osExemplos1.11,1.14e1.13, vemos que as matrizes
1 1 1 2 1 4 2 3 5
,
0 0 3 −9 5 15 −10 40 1 3 −1 5
,
1 3 13
0 1 5
0 −2 −10
s ˜ao equivalentes por linhas `as matrizes
1 0 0 0 1 0 0 0 1
,
1 3 0 2
0 0 1 −3
0 0 0 0
,
1 0 −2 0 1 5 0 0 0
,
respectivamente. Matrizes estas que s ˜ao escalonadas reduzidas.
Cuidado:elas s ˜ao equivalentes por linhas,n ˜aos ˜ao iguais!
A relac¸ ˜ao “ser equivalente por linhas” satisfaz as seguintes propriedades, cuja verificac¸ ˜ao deixa-mos como exerc´ıcio para o leitor:
• SeA ´e equivalente por linhas aB, ent ˜aoB ´e equivalente por linhas aA(simetria);
• SeA ´e equivalente por linhas aB eB ´e equivalente por linhas aC, ent ˜aoA ´e equivalente por linhas aC(transitividade).
Teorema 1.4. Toda matriz A = (aij)m×n ´e equivalente por linhas a uma ´unica matriz escalonada
reduzidaR= (rij)m×n.
O pr ´oximo resultado ser ´a usado para provar alguns resultados no cap´ıtulo de invers ˜ao de matrizes.
Proposic¸ ˜ao 1.5. SejaR uma matrizn×n, na forma escalonada reduzida. SeR6=In, ent ˜aoRtem
uma linha nula.
Demonstrac¸˜ao. Observe que o piv ˆo de uma linhaiest ´a sempre numa colunajcomj ≥i. Portanto, ou a ´ultima linha de R ´e nula ou o piv ˆo da linhan est ´a na posic¸ ˜ao n, n. Mas, neste caso todas as linhas anteriores s ˜ao n ˜ao nulas e os piv ˆos de cada linhaiest ´a na colunai, ou seja,R=In.
1.2.3
Sistemas Lineares Homog ˆeneos
Um sistema linear da forma
a11x1 + a12x2 + . . . + a1nxn = 0
a21x1 + a22x2 + . . . + a2nxn = 0
..
. ... = ...
am1x1 + am2x2 + . . . + amnxn = 0