Universidade Federal da Paraíba Universidade Federal de Campina Grande
Programa Associado de Pós-Graduação em Matemática Doutorado em Matemática
Controlabilidade exata de sistemas
parabólicos, hiperbólicos e dispersivos
por
Maurício Cardoso Santos
Controlabilidade exata de sistemas
parabólicos, hiperbólicos e dispersivos
†por
Maurício Cardoso Santos
sob orientação do
Prof. Dr. Fágner Dias Araruna
e sob co-orientação do
Prof. Dr. Enrique Fernández Cara
Tese apresentada ao Corpo Docente do Programa Associado de Pós-Graduação em Matemática - UFPB/UFCG, como requisito parcial para obtenção do título de Doutor em Ma-temática.
João Pessoa - PB Julho/2014
Universidade Federal da Paraíba Universidade Federal de Campina Grande
Programa Associado de Pós-Graduação em Matemática Doutorado em Matemática
Área de Concentração: Análise Aprovada em:
Prof. Dr. Fágner Dias Araruna (Orientador)
Prof. Dr. Enrique Fernández Cara (Co-Orientador)
Prof. Dra. Luz de Teresa Oteyza
Prof. Dra. Valéria Neves Domingos Cavalcanti
Prof. Dr. Eduardo Esteban Cerpa Jeria
Prof. Dr. Juan Bautista Límaco Ferrel
Tese apresentada ao Corpo Docente do Programa Associado de Pós-Graduação em Matemá-tica - UFPB/UFCG, como requisito parcial para obtenção do título de Doutor em MatemáMatemá-tica.
Resumo
Nesta tese, estudaremos resultados de controle para alguns problemas da teoria das equa-ções diferenciais parciais (EDPs):
• Problema de controle multi objetivo para um problema parabólico, seguindo estratégias do tipo Stackelberg-Nash: para cada controle líder, que impõe a controlabilidade nula para o estado, encontramos seguidores, em equilíbrio de Nash, associados a funcionais custo. Em seguida, determinamos o líder de menor custo.
• Controlabilidade nula para a equação de Schrödinger linear: com uma discretização espaço-tempo adequada, construímos numericamente controles-fronteira que conduzem a solução de Schrödinger a zero; utilizando técnicas de Fursikov-Imanuvilov (veja [Lec-ture Notes Series, Vol 34, 1996]) contruímos controles que decaem exponencialmente no tempo final.
• Controlabilidade nula para um sistema acoplado Schrödinger-KdV: neste trabalho, com-binando estimativas globais de Carleman com estimativas de energia, obtemos uma de-sigualdade de observabilidade. O resultado de controlabilidade segue pelo método de unicicade Hilbert (HUM).
• Controlabilidade para um sistema do tipo Euler, incompressível, invíscido, sob influência de uma temperatura: Utilizamos os métodos de extensão seguido do método do retorno para provar resultados de controlabilidade para este sistema.
Abstract
In this thesis, we study controllability results of some phenomena modeled by Partial Differential Equations (PDEs):
• Multi objective control problem, for parabolic equations, following the Stackelber-Nash strategy is considered: for each leader control which impose the null controllability for the state variable, we find a Nash equilibrium associated to some costs. The leader control is chosen to be the one of minimal cost.
• Null controllability for the linear Schrödinger equation: with a convenient space-time discretization, we numerically construct boundary controls which lead the solution of the Schrödinger equation to zero; using some arguments of Fursikov-Imanuvilov (see [Lecture Notes Series, Vol 34, 1996]) we construct controls with exponential decay at final time.
• Null controllability for a Schrödinger-KdV system: in this work, we combine global Carleman estimates with energy estimates to obtain an observability inequality. The controllability result holds by the Hilbert Uniqueness Method (HUM).
• Controllability results for a Euler type system, incompressible, inviscid, under the influ-ence of a temperature are obtained: we mainly use the extension and return methods.
Agradecimentos
-Aos meus amigos acadêmicos, Diego (Diegão), Felipe (Felipão), José (Zé) e Pitágoras (Pita) que juntos conseguimos enfrentar as dificuldades que surgiram na vida como estudante.
-Ao professor Marcondes Rodrigues Clark, por ter me recebido de braços abertos e ter dedicado parte do seu tempo a me passar e ensinar um pouco do seu conhecimento matemático, sobretudo lições de vida que vou carregar pelo resto da minha vida.
-Ao professor Fágner Dias Araruna, que aceitou ser meu orientador e proporcionou várias oportunidades de avançar mais e estudar tópicos cada vez mais interessantes.
-Ao professor Enrique Fernández-Cara, por sua atenção e hospitalidade em Sevilla, pro-porcionando o ambiente ideal para desenvolver este trabalho. Muito obrigado por tudo!
-Aos professores de graduação e pós graduação que tive na UFPI e UFPB, respectivamente. Por meio de incentivos e cursos motivadores fui capaz de avançar e cumprir o estabelecido. Em especial: Barnabé Pessoa Lima, Jurandir de Oliveira Lopes, Roger Peres de Moura, Daniel Marinho Pellegrino, Everaldo Souto de Medeiros, João Marcos Bezerra do Ó.
Dedicatória
-Dedico aos meus pais (Manoel e Francisca) que sempre me apoiaram, incentivaram e trabalharam duro para educar e a dar o melhor que eles podiam para mim e para meus irmãos.
-Aos meus irmãos (Fábio, Fabrício e Marcelo) com quem posso contar a qualquer momento e em qualquer situação.
-A minha namorada Mabel Lopes, por tudo que construímos juntos nessa caminhada.
-A todas as minhas tias-mães que sempre me trataram com muito carinho e amor. Dedico em especial a minha madrinha Silvia Maria que sempre me deu o apoio que eu precisava.
-Aos meus primos-irmãos, pelo carinho que tenho por vocês.
Sumário
Introdução i
1 Stackelberg-Nash exact controllability for linear and semilinear parabolic
equations 1
1.1 Introduction . . . 3
1.1.1 The problems and their motivations . . . 4
1.1.2 The main results . . . 6
1.2 The linear case . . . 8
1.2.1 Nash equilibrium . . . 8
1.2.2 Null controllability . . . 11
1.3 The semilinear case . . . 16
1.3.1 Characterization of Nash quasi-equilibria . . . 16
1.3.2 Proof of Theorem 2 . . . 17
1.3.3 Equilibria and quasi-equilibria . . . 19
1.4 The case with restrictions . . . 22
1.5 Some additional comments and questions . . . 24
1.5.1 On the assumptionO1,d=O2,d . . . 24
1.5.2 Stackelberg-Nash controllability and Stokes and Navier-Stokes systems 25 1.5.3 Other Stackelberg strategies . . . 26
1.5.4 The boundary case . . . 26
2 Numerical null controllability of the 1D linear Schrödinger equation 29 2.1 Introduction, the null controllability problem . . . 31
2.2 Variational approaches to the controllability problem . . . 33
2.2.1 Preliminaries. A first variational equality . . . 33
2.2.2 Analysis of (2.3) . . . 35
2.2.3 A second variational equality . . . 36
2.3 Numerical analysis of the variational equalities . . . 37
2.3.1 First approach . . . 37
2.3.2 Second approach . . . 38
2.3.3 The finite dimensional spacesPh and Wh . . . 39
2.3.4 Convergence results . . . 41
2.5 Additional comments and conclusions . . . 45
3 Internal null controllability of a linear Schrödinger-KdV system on a boun-ded interval 49 3.1 Introduction . . . 51
3.2 Well-posedness results . . . 54
3.2.1 Previous regularity results . . . 55
3.2.2 Proofs of propositions 3.1 and 3.2 . . . 56
3.3 Carleman estimates . . . 56
3.3.1 Carleman estimate for the KdV equation . . . 57
3.3.2 Carleman inequality for the Schrödinger equation . . . 61
3.3.3 Carleman Estimate for the Schrödinger-KdV System . . . 64
3.4 Observability inequality . . . 70
4 Boundary controllability of incompressible Euler fluids with Boussinesq heat effects 73 4.1 Introduction . . . 75
4.2 Preliminary results . . . 79
4.2.1 Construction of a trajectory whenN = 2 . . . 81
4.2.2 Construction of a trajectory whenN = 3 . . . 83
4.3 Proof of Theorem 6 . . . 85
4.4 Proof of Proposition 9. The 2D case . . . 86
4.5 Proof of Proposition 9. The 3D case . . . 92
4.6 Proof of Theorem 7 . . . 96
Introdução
Sempre foi de interesse da humanidade investigar o comportamento de determinados fenô-menos da natureza. Uma pergunta natural que surge é a possibilidade de atuar ou influenciar tal fenômeno de maneira a obter um comportamento desejado. Uma vez que estes fenômenos são compreendidos e representados matematicamente, uma grande quantidade de ferramen-tas e métodos estão disponíveis para serem aplicados e é neste ponto que se baseia a teoria moderna de Controle.
O objetivo desta tese é mostrar o estudo da controlabilidade (em um sentido que será explicado posteriormente) de alguns problemas da teoria das equações diferenciais parciais. Ao longo desta introdução, descreveremos um pouco a evolução histórica da teoria do controle e, em seguida, motivaremos brevemente cada trabalho que será estudado nesta tese.
A segunda guerra mundial serviu para perceber que os modelos considerados até o momento não eram suficientes para descrever a complexidade do mundo real. Na verdade, já se sabia que os verdadeiros sistemas eram não lineares ou indetermináveis, desde que estes são afeta-dos por alguma "pertubação”. As contribuções de R. Bellman no contexto de programação dinâmica, R. Kalman nas técnicas de filtragem e aproximações algébricas a sistemas lineares e L. Pontryagin com o princípio do máximo para problemas de controle óptimo não linear, estabeleceram a base para a teoria do controle moderna. Tal teoria ganhou um formalismo ou uma representação matemática de modo a conseguirmos usar as ferramentas matemáticas que temos para solucionarmos tais problemas de controle.
Um sistema de controle é uma equação de evolução (EDO ou EDP) que depende de um parâmetrou, que escreveremos da seguinte forma:
˙
y =f(t, y, u),
ondet∈[0, T]é o tempo,y : [0, T]→Yé a função estado eu: [0, T]→Ué o controle. Temos queYe Usão espaços de funções adequados. Na equação acima, y˙ representa a derivada de
y em relação ao tempot.
O problema de controle consiste em encontrar um controle u tal que a função estado se comporta de uma forma desejada. Exemplificaremos alguns, dentre os vários, problemas de controlabilidade presentes na literatura.
Controle óptimo: Encontrar um controle que minimiza algum funcional custo, por exemplo,
J(u) =ky(T;u)−y¯k2Y+kuk2U,
em quey¯é um alvo desejado e y(T;u) é o estado alcançado pelo sistema no tempo final T. Controlabilidade exata: Dado dois tempos T0 < T1 e y0, y1 dois possíveis estados do sistema, encontraru: [T0, T1]→Utal que
(
˙
y=f(y, u) em [T0, T1]
y(T0) =y0, y(T1) =y1.
Em outras palavras, partindo de qualquer configuração inicialy0, podemos conduzir a solução
y para o estadoy1 sob a ação do controleu.
Controlabilidade aproximada: Dados T0 < T1, dois possíveis estados y0, y1 e ǫ > 0, encontrar u: [T0, T1]→Utal que
(
˙
y=f(y, u) em [T0, T1]
y(T0) =y0, ky(T1)−y1kY< ǫ.
A controlabilidade aproximada é uma versão mais fraca se comparada a controlabilidade exata. De fato, em vez de pedirmos que a função estado seja exatamente y1 em T1, pedimos apenas que o estado esteja arbitrariamente perto de y1.
Controlabilidade Nula: Dados dois temposT0< T1 e y0 um estado do sistema, encon-traru: [T0, T1]→Utal que
(
˙
y=f(y, u) em [T0, T1]
Para finalizar temos
Controlabilidade exata para as trajetórias: Dados T0 < T1, y0 ∈Y e y¯uma traje-tória (uma solução com controle u¯: [T0, T1]→U). encontrar um controleu: [T0, T1]→Utal
que (
˙
y=f(y, u) em [T0, T1]
y(T0) =y0, y(T1) = ¯y(T1).
Os conceitos de controlabilidade nula e controlabilidade exata para as trajetórias são de especial importância em sistemas não reversíveis e sistemas com efeito regularizante. Nestes casos, a controlabilidade exata não é esperada.
Sejamos mais específico sobre os problemas de controle que serão abordados nesta tese. Introduziremos os quatros trabalhos que serão mostrados na ordem seguinte:
Capítulo 1
Stackelberg-Nash exact controllability for linear and semilinear parabolic equations
Seja N um número inteiro e positivo, Ω ⊂ RN e T um número real. Consideremos em
Q = Ω×(0, T) um sistema distribuído, governado por uma equação parabólica com um controle v de suporteω.
Abordaremos o seguinte método: Associado a este sistema, temos três (ou mais) objeti-vos, um do tipo "controlabilidade” e outros dois, possivelmente conflitiobjeti-vos, do tipo "controle óptimo” com a tarefa de fazer com que o estado não seja "muito distante” de um determinado valor desejado. Dividimos v em três partes, digamos f, v1 e v2 correspondendo, respectiva-mente, à divisão de ω em três regiões O, O1 e O2. Utilizamos a noção de optimização de Stackelberg (muito utilizado em economia) em que v1 e v2 são os seguidores e f é o líder. Fixadof, resolvemos um problema de controle óptimo parav1 e v2; o par óptimo é escolhido por meio de um critério de optimização, não cooperativo de J. Nash a ser detalhado poste-riormente. Desta forma, escrevemos o par em função de f de uma forma (v1, v2) = F(f), obtendo um sitema de optimalidade associado, dependendo apenas def, onde estudamos um problema de controlabilidade com controlef.
Consideremos, por simplicidade, a equação do calor com seus respectivos controles defini-dos segundo o método de Stackelberg:
yt−∆y+a(x, t)y=F(y) +f1O+v11O1+v21O2 in Q,
y= 0 on Σ,
y(x,0) =y0(x) in Ω,
(1)
onde F : R → R é semilinear. Para i = 1,2, sejam Oi,d subconjuntos abertos de Ω e
consideremos os seguintes funcionais (secundários):
Ji(f;v1, v2) :=
αi
2
ZZ
Oi,d×(0,T)
|y−yi,d|2 dx dt+µi 2
ZZ
Oi×(0,T)
|vi|2dx dt. (2) Seja também o funcional principal
J(f) := 1 2
ZZ
O×(0,T)
onde αi > 0, µi > 0 são constantes e yi,d = yi,d(x, t) são funções dadas. A estrutura do processo é da forma: Os seguidoresv1 e v2 assumem que o líderf fez uma escolha e posteri-ormente serão um Equilíbrio de Nash para os custosJi (i= 1,2). Fixadof, procuramos por controlesvi∈L2(Oi×(0, T))que satisfazem
J1(f;v1, v2) = min ˆ
v1 J1(f; ˆv
1, v2), J
2 f;v1, v2= min ˆ
v2 J2(f;v
1,vˆ2), (3) e o par(v1, v2)será chamado equilíbrio de Nash paraJ
1eJ2. Observemos que, se os funcionais
Ji (i= 1,2)são convexos, então(v1, v2) é um equilíbrio de Nash se, e somente se,
J1′(f;v1, v2)(ˆv1,0) = 0, ∀vˆ1 ∈L2(O1×(0, T)) ; v1 ∈L2(O1×(0, T)) (4) e
J2′(f;v1, v2)(0,vˆ2) = 0, ∀ˆv2 ∈L2(O2×(0, T)) ; v2 ∈L2(O2×(0, T)). (5) Fixemos uma trajetória suficientemente regular, isto é, solução do problema:
yt−∆y+a(x, t)¯y=F(y) in Q,
y = 0 on Σ,
y(x,0) =y0(x) in Ω.
(6)
Uma vez que o equilíbrio de Nash foi determinado para cada f, procuramos um controle óptimofˆ∈L2(O ×(0, T)) tal que
J( ˆf) = min
f J(f), (7)
sujeito à restrição
y(x, T) =y(x, T) em Ω. (8) Existem vários trabalhos relacionados a este tópico:
• Os trabalhos de J.-L. Lions [61] e [62], onde o autor apresenta alguns resultados relaci-onados às estratégias de Pareto e Stackelberg, respectivamente.
• O trabalho de Díaz e Lions [32], onde a controlabilidade aproximada de um sistema é estabelecido seguindo a estratégia de Stackelberg-Nash e a extensão em Díaz [31], que fornece uma caracterização da solução por meio do teorema de dualidade de Fenchel-Rockafellar.
• Os trabalhos [74] e [75], onde Ramos, Glowinski e Periaux estudam o equilíbrio de Nash do ponto de vista teórico e numérico para EDPs parabólicas e para a equação de Burgers, respectivamente.
Os resultados de controlabilidade presentes nos trabalhos citados acima dão respostas apenas no nível de controle aproximado; a grande novidade neste trabalho é estender os resultados para um nível de controle exato.
Suponhamos que O1,d=O2,d=Od. Os resultados pincipais são os seguintes:
Teorema (Caso linear): Suponhamos que F ≡0, Od∩ O 6=∅ e queµi são suficientemente grandes
µi ≥C(Ω, T,Oi,Od, αi,kakL∞(Q)), i= 1,2.
Assumimos que as funções yi,d satisfazem a seguinte propriedade de compatibilidade: existe uma função positiva ρˆ= ˆρ(x, t) que explode em t =T tal que se y¯ é a única solução de (6) com F ≡0 associada ao dado inicialy0∈L2(Ω)então
ZZ
Od×(0,T)
ˆ
ρ2|y−yi,d|2dx dt <+∞, i= 1,2. (9) Para qualquer y0 ∈ L2(Ω) existem controles f ∈ L2(O ×(0, T)) associado ao equilíbrio de Nash (v1, v2) tais que a correspondente solução (1) satisfaz (8).
Os próximos resultados estão relacionados ao caso em que F é semilinear e não identi-camente nula. A dificuldade neste caso se encontra no fato que os funcionais (2) perdem a convexidade e, portanto, o conceito de equilíbrio (3) não pode mais ser associado ao conceito diferencial (4)-(5). Desta forma, é necessário definir um conceito mais fraco de equilíbrio de Nash. Dizemos que o par (v1, v2) é um quase equlíbrio de Nash se satisfaz (4)-(5). Assim temos o segundo resultado:
Teorema (Caso semilinear, F ∈ W1,∞): Suponhamos que F ∈ W1,∞(R) e que µ
i > 0 são suficientemente grandes. Seja y¯ é a única solução de (6) com dado inicial y0 ∈ L2(Ω)
e suponhamos que (9) é verdadeiro. Então, para cada y0 ∈ L2(Ω), existem controles f ∈
L2(O ×(0, T))e quase equilíbrio de Nash (v1, v2) tal que a solução de (1)satisfaz (8). Uma questão natural é sob que condição um quase equilíbrio de Nash é equivalente ao equilíbrio de Nash. A resposta está no terceiro resultado:
Teorema (Caso semilinear, F ∈ W2,∞): Suponha que F ∈ W2,∞(R), yi,d ∈ L∞(Oi,d×
(0, T))(i= 1,2). Suponha também que y0 ∈H01(Ω)(resp. y0 ∈L2(Ω)) e N ≤14 (resp. N ≤
12). Então, existe C >0 tal que, se f ∈L2(O ×(0, T))e ainda se µ
i satisfaz
µi ≥C(1 +kfkL2(O×(0,T))), então as condições (3)e (4)-(5) são equivalentes.
O quarto e último resultado consiste em analisar a situação se seguidores estão restritos a um subconjunto convexo e fechadoUi ⊂L2(Oi×(0, T)). SejaI1 e I2 dois intervalos convexos e fechados com0∈I1∩I2, consideremos
Ui ={v∈L2(Oi×(0, T)) : v(x, t)∈Ii}, i= 1,2, (10) e suponhamos que a minimização de J1 e J2 em (3) é sujeita à restrição vˆ1 ∈ U1 e ˆv2 ∈ U2. Temos o seguinte resultado:
Teorema (Caso com restrições): Suponhamos queF ≡0e queµi>0são suficientemente grandes. Seja y a única solução de (6) com dado inicial y¯0 ∈L2(Ω). Então, para cada y
L2(Ω), existem controlesf ∈L2(O ×(0, T))e equilíbrio de Nash associado (v1, v2)∈ U1× U2 tal que a solução de (1) satisfaz (8).
Os resultados deste trabalho são encontrado em [6].
Capítulo 2
Numerical null controllability of the 1D linear Schrödinger equation Este capítulo lida com a controlabilidade exata, com controle atuando na fronteira, para a equação de Schrödinger unidimensional. A equação do estado é dada por:
iyt−yxx+V(x, t)y= 0, (x, t)∈Q= (0,1)×(0, T),
y(0, t) =u(t), y(1, t) = 0, t∈(0, T), y(x,0) =y0(x), x∈(0,1).
(11)
Estamos supondo que T > 0, y0 ∈ H01((0,1);C) e V, Vx ∈ L∞(Q;R). Em (11), u ∈
L2((0, T);C)é o controle e y=y(x, t) é o estado associado.
O principal resultado deste capítulo, é calcular aproximações numéricas de controles que conduzem a solução de (11) a zero (controlabilidade nula). Devido à reversibilidade em tempo da equação de Schrödinger, as propriedade de controlabilidade nula e exata são equivalentes. É bem conhecido que, para qualquerT >0, (11) possui a propriedade de controlabilidade nula, veja [65]. Isto significa que, para qualquer y0 ∈ L2((0,1);C), existem controles u ∈
L2((0, T);C)tal que o estado associado satisfaz y(·, T) = 0; mais ainda, o controle de norma
mínima em L2((0, T);C) é dado por u=φx(0,·), ondeφ resolve o problema adjunto
iφt−φxx+V φ= 0, (x, t)∈Q,
φ(x, t) = 0, (x, t)∈ {0,1} ×(0, T), φ(x, T) =φT(x), x∈(0,1),
(12)
comφT em um espaço apropriado. Citamos os trabalhos [60, 83, 84, 85] onde a controlabilidade para a equação de Schrödinger foi investigada.
Neste trabalho, usaremos as ideias inspiradas nos trabalhos de Fursikov e Imanuvilov em [38], para problemas parabólicos similares. Mais precisamente, consideremos o seguinte problema de minimização:
Minimizar J(y, u) = 1 2
ZZ
Q
ρ2|y|2dx dt+1 2
Z T
0
ρ1(0, t)2|u|2dt Sujeito a (y, v)∈ C(y0, T).
(13)
Em (13)
C(y0, T) ={(y, u)∈X: y é solução de(11) e satisfazy(·, T) = 0}, onde
X =L2(Q;C)×L2((0, T);C).
Assumimos também que
(
ρ=ρ(x, t), ρ1 =ρ1(x, t) são contínuas, reais e ≥ρ∗>0,
são funções peso que, em princípio, podem explodir em t=T.
Nosso objetivo consistirá em resolver numericamente o problema de minização (13). O fato de buscarmos um controle e um estado que são soluções de (13) pode ser justificado como segue: Primeiramente, com esse método obtemos um "bom” par estado-controle que satisfaz (11) com a propriedade de controlabilidade nula. Segundo que, naturalmente, os controles obtidos terão uma propriedade de decaimento exponencial, evitando oscilação indesejadas do controle quando t → T; este comportamento já foi observado em problemas parabólicos similares quando se calcula numericamente os controles de norma mínima. Para este propósito, veremos que C(y0, T) em (2.3) é não-vazio e que (2.3) possui uma única solução.
O par (y, u) solução para (13) será aproximado de duas formas distintas: primeiramente em termos de uma nova variávelp, pertencente a um espaço adequadoP, solução do seguinte problema variacional:
ZZ
Q
ρ−2Lp Lq dx dt+
Z T
0
ρ−12px(0, t)qx(0, t)dt=ihy0, q(·,0)i ∀q∈P; p∈P.
(14)
Neste caso teremos
y=ρ−2Lp, u=−ρ−12px|x=0. (15) A segunda forma consiste em aplicar uma mudança de variável, escrevendo o par (y, u) em termos de uma variável w (que dependerá de p), pertencente a um espaço adequado W, solução do problema
ZZ
Q
(A1w+A2wt+A3wx+A4wxx) (A1m+A2mt+A3mx+A4mxx)dx dt
+
Z T
0
(T −t)2γwx(0, t)mx(0, t)dt=iTγhy0, ρ1(·,0)m(·,0)i ∀m∈W; w∈W,
(16)
onde os coeficientes Ai serão funções em L∞(Q;C). Neste caso teremos
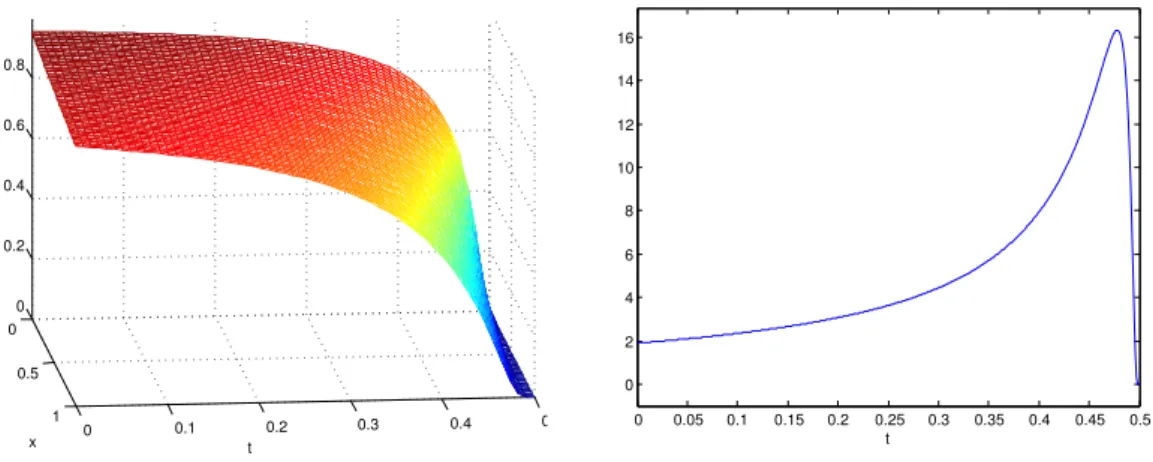
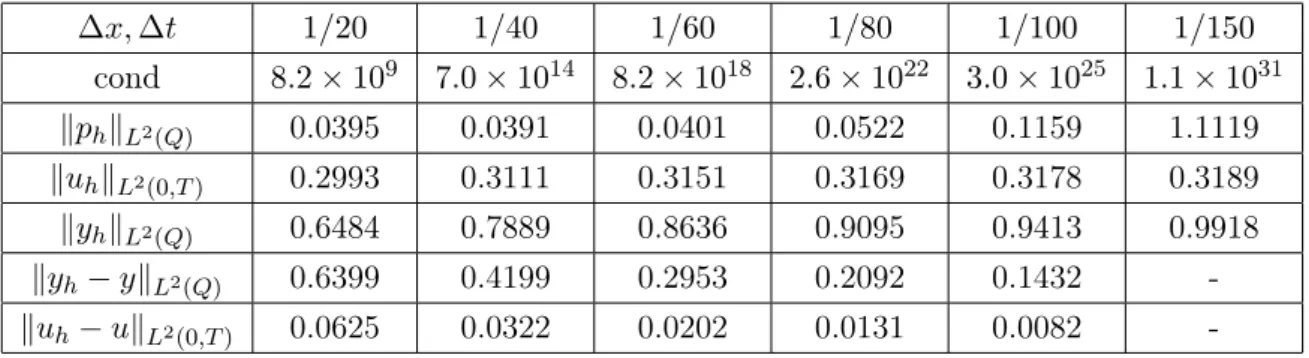
y=ρ−1(A1w+A2wt+A3wx+A4wxx), u=−(T −t)γρ1(0,·)−1wx(0,·). (17) Para calcularmos as aproximações para a solução(y, u)de (13), em ambos os casos, faremos uso do método de elementos finitos para determinar aproximações numéricas parape w. Em seguida, utilizaremos as expressões (15) e (17).
Por (14) e (16), vemos quep ewsão soluções fracas de um problema de ordem quatro no espaço e ordem dois no tempo. Por esta razão é natural a utilização da discretização em termos de polinômios que pertencem a(P3,x⊗P1,t)(R). Os resultados obtidos serão apresentados em
termos de gráficos e tabelas.
Os resultados deste trabalho são encontrado em [36].
Capítulo 3
Nos últimos anos, muitos artigos foram voltados ao estudo de propriedades de controlabili-dade para sistemas acoplados de equações diferenciais parciais onde novos fenômenos surgem. De fato, em alguns sistemas parabólicos foi provado controlabilidade para tempo grande, ao contrário do que ocorre quando se estuda a equação individualmente. Grande parte desses resultados lidam com a controlabilidade para sistemas parabólicos (veja [3]) ou hiperbólicos (veja [1, 2, 7]). Abordagens por estimativas de Carleman, problema de momentos e métodos de energia foram aplicados para obter controlabilidade interna e fronteira.
Existem poucos resultados relacionados com a controlabilidade de sistemas dispersivos. Vários sistemas do tipo Boussinesq foram considerados em [68] onde resultados de controla-bilidade exata são provados. Outros sistemas acoplados com equações do tipo Korteweg-de Vries foram estudados em [22, 67] onde resultados de controlabilidade exata na fronteira foram estabelecidos.
Neste trabalho, estamos interessados em um sistema linear dispersivo definido no intervalo
[0,1] e formado por duas EDPs: uma equação de Schrödinger e uma equação Korteweg-de Vries (KdV). Consideramos um controle interno com suporte em um subconjunto aberto
ω⊂(0,1)e condição de fronteira homogênea.
DadoT >0, denotamosQ= (0,1)×(0, T). Mais ainda,1ω é a função característica deω eM, a1, a2, a3, a4 são funções dadas. Neste tabalho, para um número complexoz, denotamos porRe(z) eIm(z) a parte real e a parte imaginária dez, respectivamente.
O sistema é dado conforme segue:
iwt+wxx =a1w+a2y+ℓ1ω in Q,
yt+yxxx+ (M y)x=Re(a3w) +a4y+h1ω in Q,
w(0, t) =w(1, t) = 0 in (0, T), y(0, t) =y(1, t) =yx(1, t) = 0 in (0, T),
w(x,0) =w0(x), y(x,0) =y0(x) in (0,1),
(18)
onde o estado é formado pela função complexa w e a função real y. Os controles são a função complexa ℓ e a função real h. Este sistema é uma versão linearizada de um sistema Schrödinger-Korteweg-de Vries, não linear, presente na mecânica dos fluidos assim como na física de plasma para modelar interações entre ondas curtas w = w(x, t) e ondas longas
y = y(x, t) (veja [58] onde ondas capilar-gravidade são consideradas). Resultados de boa colocação foram obtidos quando o sistema é estudado em toda reta real [14, 25] ou no toro [8]. Este sistema pode ser visto como a acoplamento de três equações reais considerando a parte real e a parte imaginária da equação de Schrödinger. Neste trabalho queremos provar um resultado de controlabilidade com menos controles que equações. De fato, provaremos que este sistema é nulamente controlável utilizando o controlehe também um controle puramente real ou puramente imaginárioℓ. Então, necessitaremos dois controles reais para controlar todo o sistema. É importante mencionar que a equação de Schrödinger é controlável com um controle complexo. Graças ao acoplamento com a equação KdV, podemos remover ou a parte real ou a parte imaginária do controle.
O principal resultado do trabalho segue:
Teorema (Controlabilidade nula): SejaT >0. Suponhamos queM ∈L2(0, T;H1(0,1))∩
L∞(0, T;L2(0,1)), a
Supo-nhamos também que
Im(a2)∈C((0, T);W1,∞(0,1)) com |Im(a2)| ≥δ >0 em ω. (19) Para qualquer (w0, y0) ∈H−1(0,1)×L2(0,1), existem controles (ℓ, h) ∈L2(0, T;H−1(ω))×
L2(0, T;L2(ω)), tal que a única solução(w, y)∈C([0, T],H−1(0,1)×L2(0,1))de (18) satisfaz
w(T,·) = 0, y(T,·) = 0.
Acima, espaços em negrito dentotam espaços de funções complexas, do contrário, denotam espaços de funções reais.
De forma a provar o teorema anterior, seguimos o processo padrão de observabilidade-controlabilidade, que reduz a propriedade de controlabilidade nula à seguinte desigualdade de observabilidade:
Teorema (Desigualdade de observabilidade): Seja Qω = ω×(0, T). Existe C > 0 tal que
kφ(·,0)k2H1
0(0,1)+kψ(·,0)k
2
L2(0,1) ≤C
ZZ
Qω
(|Re(φ)|2+|Re(φx)|2+|ψ|2)dxdt
,
para qualquer (φT, ψT)∈H10(0,1)×L2(0,1), onde (φ, ψ) satisfaz o sistema adjunto
iφt+φxx=a1φ+ ¯a3ψ in Q, −ψt−ψxxx−M ψx =Re( ¯a2φ) +a4ψ in Q,
φ(0, t) =φ(1, t) = 0 in (0, T), ψ(0, t) =ψ(1, t) =ψx(0, t) = 0 in (0, T),
φ(x, T) =φT(x), ψ(x, T) =ψT in (0,1). Estes resultados podem ser vistos em [5].
Capítulo 4
Boundary controllability of incompressible Euler fluids with Boussinesq heat effects
Seja Ω um subconjunto aberto, limitado e não-vazio de RN de classe C∞ (N = 2 ou
N = 3). Suponhamos que Ωé conexo e, por simplicidade, simplesmente conexo. Seja Γ0 um subconjunto aberto e não vazio da fronteiraΓ deΩ.
Neste capítulo estamos interessados na controlabilidade fronteira do sistema:
yt+ (y· ∇)y=−∇p+~kθ in Ω×(0, T),
∇ ·y= 0 in Ω×(0, T),
θt+y· ∇θ=κ∆θ in Ω×(0, T), y·n= 0 on (Γ\Γ0)×(0, T), y(x,0) =y0(x), θ(x,0) =θ0(x) in Ω,
(20)
• O campo y e a função escalar p representam, respectivamente, a velocidade e pressão do fluido emΩ×(0, T), respectivamente.
• A funçãoθ representa a distribuição de temperatura do fluido.
• O lado direito~kθpode ser visto como a densidade daforça de flutuação (~k∈RN é um
vetor não nulo).
• A constante não negativa κ≥0é o coeficiente de difusão de calor.
Na mecânica dos fluidos, o sistema (20) descreve o movimento de um fluido invíscido e incompressível sujeito a uma transferência de calor convectiva sob influência de um campo gravitacional, veja [64].
Abordaremos os casos κ = 0 e κ > 0. No caso κ = 0 denominamos (20) de sistema de Boussinesq invíscido e incompressível.
Seja α∈(0,1)e definimos
Cm,α0 (Ω;RN) :={u∈Cm,α(Ω;RN) : ∇ ·u= 0 in Ω, u·n= 0 on Γ},
C(m, α,Γ0) :={u∈Cm,α(Ω;RN) : ∇ ·u= 0 in Ω, u·n= 0 on Γ\Γ0},
onde Cm,α(Ω;RN) denota o espaço das funções que assumem valores em RN e que suas
derivadas até a ordemm são Hölder-contínuas em Ωcom expoenteα.
Quando κ = 0, é apropriado considerar a controlabilidade exata fronteira para (20). Em termos gerais, pode ser formulada como segue
Dadosy0,y1, θ0 e θ1 em espaços apropriados com y0·n=y1·n= 0 sobreΓ\Γ0, encontrar (y, p, θ) tal que (20)é satisfeito, mais ainda,
y(x, T) =y1(x), θ(x, T) =θ1(x) em Ω. (21) Observe que, quandoκ= 0, de modo a determinar, sem ambiguidade, uma única solução regular local em tempo para (20), é suficiente fornecer a componente normal da velocidade na fronteira, todo o vetorye a temperaturaθ, na região da fronteira por onde o fluido entra, i.e. apenas onde y·n <0, veja por exemplo [63]. Assim, podemos assumir que os controles tem a forma
y·n sobre Γ0×(0, T), com
Z
Γ0
y·ndΓ = 0;
y em qualquer ponto de Γ0×(0, T)satisfazendoy·n<0,
θ em qualquer ponto de Γ0×(0, T) satisfazendoy·n<0.
O significado da propriedade de controlabilidade exata é que, quando vale, poderemos conduzir s solução de qualquer estado (y0, θ0) exatamente a qualquer estado final (y1, θ1), atuando apenas sobre uma pequena parte da fronteira durante um intervalo de tempo arbi-trariamente pequeno.
De forma a apresentar um problema de controlabilidade na fronteira adequado, definimos
γ ⊂Γ. Então o problema de controlabilidade segue
Dados y0, y1 e θ0 em espaços apropriados com y0·n = y1·n = 0 sobre Γ\Γ0 e θ0 = 0 sobreΓ\γ, encontrar(y, p, θ) comθ= 0sobre (Γ\γ)×(0, T) tal que (20) é válido e, mais ainda,
y(x, T) =y1(x), θ(x, T) = 0 in Ω. (22) Se é sempre possível encontrar y,p e θ, dizemos que o sistema de Boussinesq, invíscido, incompressível com temperatura difusiva (20) possui a propriedade de controle exato-nulo para(Ω,Γ0,Γ)no tempo T.
Observe que, seκ >0e fixamos as mesmas condições de fronteira de antes e (por exemplo) condição de Dirichlet para θda forma
θ=θ∗1γ sobre Γ×(0, T),
existe uma única solução para (20). Podemos assumir, neste caso, que os controles tem a forma
y·n sobre Γ0×(0, T), com
Z
Γ0
y·ndΓ = 0,
y em qualquer ponto de Γ0×(0, T) satisfazendoy·n<0,
θ em qualquer ponto de γ×(0, T).
O significado da propriedade de controle exato-nulo é que, quando vale, podemos conduzir o par(y, θ)de qualquer estado inicial(y0, θ0)exatamente a qualquer estado da forma(y1,0), atuando apenas em uma pequena parte Γ0 e γ da fronteira, durante um intervalo de tempo arbitrariamente pequeno(0, T).
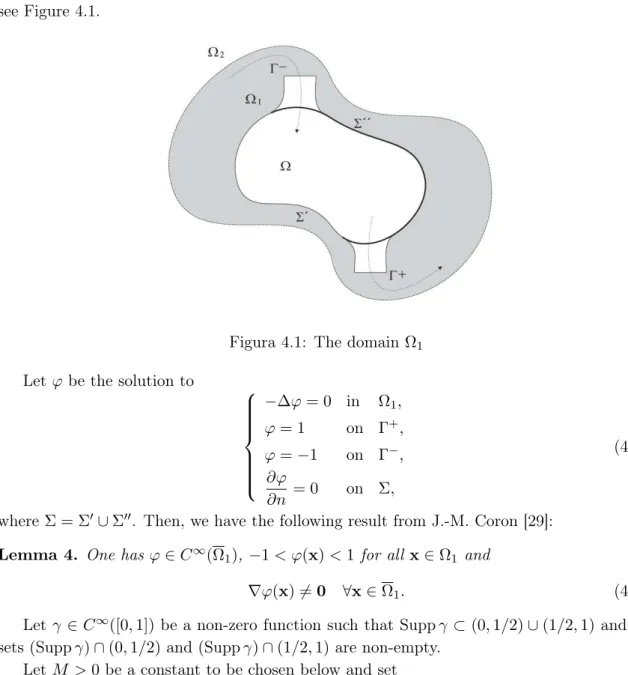
Nas últimas décadas, muita investigação no contexto de fluidos incompressíveis perfeitos foi realizada. Temos, principalmente, os trabalhos de Coron [28, 29] e Glass [41, 42, 43]. Neste trabalho, adaptaremos as idéias de [28] e [43] para o problema modelado por (20).
Para finalizar, apresentaremos dois dos principais resultados obtidos neste trabalho. Teorema (κ = 0): Se κ = 0, então então o sistema de Boussinesq, invíscido (20) é exa-tamente controlável para (Ω,Γ0) em qualquer tempo T > 0. Mais precisamente, para qual-quer y0,y1 ∈ C(2, α,Γ0) e qualquer θ0, θ1 ∈ C2,α(Ω), existem y ∈ C0([0, T];C(1, α,Γ0)),
θ∈C0([0, T];C1,α(Ω)) e p∈ D′(Ω×(0, T)) tal que temos (20) and (21).
Nos argumentos que provam o teorema anterior, vemos a necessidade da regularidadeC2,α para o dado inicial e final. Entretanto, provamos a existência da solução controlada apenas no espaço C1,α. Seria interessante melhorar este resultado mas, até o momento, é um problema em aberto.
O segundo resultado do trabalho segue
Teorema (κ >0): Seja Ω,Γ0 e γ dados, e suponhamos que κ >0. Então (20)é localmente exato-nulo controlável. Mais precisamente, para qualquerT >0e qualquery0,y1 ∈C(2, α,∅), existe η >0, dependendo dey0, tal que, para cada θ0 ∈C2,α(Ω)com
podemos encontrar y ∈ C0([0, T];C1,α(Ω;RN), θ ∈ C0([0, T];C1,α(Ω)) com θ = 0 sobre
(Γ\γ)×(0, T), e p∈ D′(Ω×(0, T))satisfazendo (20) e (22). Estes resultados podem ser vistos em [82].
Problemas em aberto e trabalhos futuros
Comentaremos brevemente uma série de perguntas e problemas em aberto que os resulta-dos contiresulta-dos nesta tese produziram.
• Outros tipos de equilíbrio: No Capítulo 1, o par óptimo é determinado segundo o critério não cooperativo de Nash. Um problema natural a seguir é utilizar outros tipos de estratégias para determinar o par. Um exemplo clássico é o de equilíbrio de Pareto; seguindo a notação do Capítulo 1 temos:
Definição (Equilíbrio de Pareto): Para cadaf ∈L2(O ×(0, T))dizemos que o par
(u1(f), u2(f))∈ H é um equilíbrio de Pareto se não existe (ˆu1,uˆ2)∈ H satisfazendo
Ji(ˆu1,uˆ2)≤Ji(u1(f), u2(f)) for i= 1,2, com alguma das desigualdades sendo estrita.
Uma vez que o par(u1(f), u2(f))está fixado, queremos determinar f tal que o estado
y associado af e a(u1(f), u2(f))satisfaz (8). Este tema é o alvo de um trabalho em andamento.
• Estratégias do tipo Stackelberg-Nash para o problema de Stokes:
Problemas similares aos do Capítulo 1 podem ser postulados para sistemas do tipo Stokes
yt−∆y+ (w· ∇)y+∇p=f1O+v11O1 +v21O2 in Q,
∇ ·y= 0 in Q,
y= 0 on Σ,
y(x,0) =y0(x) in Ω.
(23)
O dado inicialy0 pertence ao espaço de Hilbert
H :={z∈L2(Ω)N :∇ ·z= 0 in Ω, z·n= 0 on Γ},
o campow pertence aL∞(0, T;H) e os controlesf e vi satisfazem
f ∈L2(O ×(0, T))N, vi∈L2(Oi×(0, T))N.
Com os funcionais J e Ji poderemos formular as estratégias do tipo Stackelberg-Nash associada a uma propriedade de controllabilidade nula para (23).
A situação se torna mais difícil quando analisamos o sistema de Navier-Stokes
yt−∆y+ (y· ∇)y+∇p=f1O+v11O1+v
21
O2 in Q,
∇ ·y= 0 in Q,
y= 0 on Σ,
A existência de um equilíbrio ou quase-equilíbrio para cada f e, é claro, quando vale a propriedade de controlabilidade nula associada a este equilíbrio é um problema em aberto.
Para outros resultados de controlabilidade para sistemas de Stokes e Navier-Stokes, veja [39, 53, 34, 46, 47].
• Estudo numérico da controlabilidade nula para a equação de Schrödinger1Dsemilinear Este problema consiste em encontrar aproximações numéricas para controlesuque con-duzem a solução de
iyt−yxx+V(x, t)y=F(y)y, (x, t)∈(0,1)×(0, T),
y(0, t) =u(t), y(1, t) = 0, t∈(0, T), y(x,0) =y0(x), x∈(0,1),
(24)
a zero. Devido às propriedades de regularidade da equação de Schrödinger, este pro-blema possui um certo nível de dificuldade, entretanto, resultados preliminares já foram obtidos
• Estudo numérico da controlabilidade bilinear para a equação de Schrödinger 1D
Este problema consiste em encontrar aproximações numéricas para controlesuque con-duzem a solução de
iyt−yxx+u(x, t)y= 0, (x, t)∈(0,1)×(0, T),
y(0, t) = 0, y(1, t) = 0, t∈(0, T), y(x,0) =y0(x), x∈(0,1).
(25)
Capítulo 1
Stackelberg-Nash exact controllability
for linear and semilinear parabolic
Stackelberg-Nash exact controllability
for linear and semilinear parabolic
equations
F. D. Araruna, E. Fernández-Cara, M. C. Santos
Abstract. This paper is concerned with Stackelberg-Nash strategies to control parabolic
equa-tions. We assume that we can act on the system through a hierarchy of controls. A first control (the leader) is assumed to choose the policy. Then, a Nash equilibrium pair (corresponding to a noncooperative multiple-objective optimization strategy) is identified; this governs the action of the other controls (the followers). The main novelty in this paper is that we can impose and obtain exact controllability to a prescribed (but arbitrary) trajectory. We study linear and semilinear problems and also problems with constraints on the followers.
1.1
Introduction
In classical control theory, we usually find a state equation or system and one control with the mission of achieving a predetermined goal. Usually (but not always), the goal is to minimize a cost functional in a prescribed family of admissible controls.
A more interesting situation arises when several (in general, conflictive or contradictory) objectives are considered. This may happen, for example, if the cost function is the sum of several terms and it is not clear how to average. It can also be expectable to have more than one control acting on the equation. In these case, we are led to considermulti-objectivecontrol problems.
In contrast with the mono-objective case, various strategies for the choice of good controls can appear, depending of the characteristics of the problem. Moreover, these strategies can be cooperative (when the controls mutually cooperate in order to achieve some goals) or noncooperative.
There exist various equilibrium concepts for multi-objective problems, with origin in game theory, mainly motivated by economics. Each of them determines a strategy. Thus, let us mention the noncooperative optimization strategy proposed by Nash [69], the Pareto coope-rative strategy [70] and the Stackelberg hierarchical-coopecoope-rative strategy [87].
In the context of the control of PDEs, a relevant question is whether one is able to lead the system to a desired state (exactly or approximately) by applying controls that fulfill one of these equilibrium conditions. There have been up to date several works on this subject that intended to provide an answer to this question:
• The paper by Díaz and Lions [32], where the approximate controllability of a system is established following a Stackelberg-Nash strategy and the extension in Díaz [31], that provides a characterization of the solution by means of Fenchel-Rockafellar duality theory.
• The papers [74] and [75], where Ramos, Glowinski and Periaux study Nash equilibrium from the theoretical and numerical viewpoints for linear parabolic PDEs and for the Burgers equation, respectively.
• Finally, let us mention that the Stackelberg-Nash strategy for the Stokes systems has been studied by Guillén-González et al in [48].
The controllability issues considered in these works only provide answers at the approxi-mate level. This means that the main results assert that one can lead the system to a state that is arbitrarily close to a desired target.
The main novelty of the present paper is to extend the analysis and the results to the exact controllabilityframework.
1.1.1 The problems and their motivations
Let Ω ⊂RN be a bounded domain whose boundary Γ is regular enough. Let T > 0 be
given and let us consider the cylinderQ= Ω×(0, T), with lateral boundaryΣ = Γ×(0, T).In the sequel, we will denote byC a generic positive constant. Sometimes, we will indicate the data on whichC depends by writingC(Ω),C(Ω, T), etc. The usual norm and scalar product inL2(Ω)will be respectively denoted by k · kand (·,·).
We are interested in the proof of the exact controllability to the trajectories of a multi-objective parabolic PDE problem in Q, where we apply a Stackelberg-Nash strategy. For simplicity, we will assume that only three controls are applied (one leader and two followers), but very similar considerations hold for systems with a higher number of controls.
Moe precisely, we will consider systems of the form
yt−∆y+a(x, t)y=F(y) +f1O+v11O1 +v
21
O2 in Q,
y = 0 on Σ,
y(x,0) =y0(x) in Ω,
(1.1)
where y =y(x, t) is the state, a∈ L∞(Q), F is a locally Lipschitz-continuous function and
y0 is prescribed.
In (1.1), the set O ⊂ Ω is the main control domain and O1,O2 ⊂ Ω are the secondary control domains (all them are supposed to be small); 1O,1O1 and 1O2 are the characteristic functions ofO,O1 and O2, respectively; the controls aref,v1 and v2,f is the leaderandv1 andv2 are the followers.
Let O1,d,O2,d ⊂Ω be open sets, representing observation domains for the followers. We will consider the (secondary) functionals
Ji(f;v1, v2) :=
αi
2
ZZ
Oi,d×(0,T)
|y−yi,d|2 dx dt+µi 2
ZZ
Oi×(0,T)
and the main functional
J(f) := 1 2
ZZ
O×(0,T)
|f|2dx dt, (1.3)
where theαi>0,µi >0 are constants and the yi,d=yi,d(x, t) are given functions. The structure of the control process can be described as follows:
1. The followersv1 and v2 assume that the leader f has made a choice and intend to be a Nash equilibrium for the costs Ji (i= 1,2).
Thus, once f has been fixed, we look for controlsvi ∈L2(Oi×(0, T)) that satisfy
J1(f;v1, v2) = min ˆ
v1 J1(f; ˆv
1, v2), J
2 f;v1, v2= min ˆ
v2 J2(f;v
1,vˆ2). (1.4) Any pair(v1, v2) satisfying (1.4) is called a Nash equilibrium for J1 and J2.
Note that, if the functionalsJi (i= 1,2)are convex, then(v1, v2)is a Nash equilibrium if and only if
J1′(f;v1, v2)(ˆv1,0) = 0, ∀vˆ1 ∈L2(O1×(0, T)) ; v1 ∈L2(O1×(0, T)) (1.5) and
J2′(f;v1, v2)(0,vˆ2) = 0, ∀ˆv2 ∈L2(O2×(0, T)) ; v2 ∈L2(O2×(0, T)). (1.6) 2. Let us fix an uncontrolled trajectory of (1.1), that is, a sufficiently regular solution to
the system:
yt−∆y+a(x, t)¯y=F(y) in Q,
y= 0 on Σ,
y(x,0) =y0(x) in Ω.
(1.7)
Once the Nash equilibrium has been identified and fixed for each f, we look for an optimal controlfˆ∈L2(O ×(0, T))such that
J( ˆf) = min
f J(f), (1.8)
subject to the restriction of exact controllability
y(x, T) =y(x, T) in Ω. (1.9) Several motivations can be found for control problems of this kind:
• A similar control process makes sense in the context of fluid mechanics. Thus, we can replace (1.1) and (1.7) by similar Stokes and/or Navier-Stokes systems and we can look for controlsf¯and associated Nash equilibria(v1, v2)satisfying (1.8)-(1.9). In this case, it is assumed that we act on the system through mechanical forces applied onO,O1 and O2 and the goal is to reachy at timeT keeping the velocity fieldy not too far fromyi,d inOi,d×(0, T)for i= 1,2.
• In the framework of mathematical finance, this can also be an interesting question. For instance, it is well known that the price of an European call option is governed by a backward PDE similar to (1.1). Now, the independent variable x must be interpreted as the stock price andt is in fact the reverse of time (we fix a situation at t= T and we want to know what to do in order to arrive at this situation from a well chosen state). In this regard, it can be interesting to control the solution of the system with the composed action of several agents, each of them corresponding to a different range of values of x. For further information on the modeling and control of phenomena of this kind, see for instance [30, 79, 88].
1.1.2 The main results
We will have to impose the following assumption:
O1,d =O2,d. (1.10)
Accordingly, we will denote these sets by Od; see below, in Section 1.5, some comments on the necessity of the hypothesis (1.10).
In the linear case (F ≡0), the exact controllability to the trajectories is equivalent to the null controllability property. The following result holds:
Theorem 1. Let us assume that F ≡0, Od∩ O 6=∅ and theµi are sufficiently large:
µi ≥C(Ω, T,Oi,Od, αi,kakL∞(Q)) for i= 1,2. (1.11)
There exists a positive functionρˆ= ˆρ(x, t) blowing up att=T with the following property: if
¯
y is the unique solution to (1.7) with F ≡0 associated to the initial statey0 ∈L2(Ω)and the
yi,d are such that ZZ
Od×(0,T)
ˆ
ρ2|y−yi,d|2dx dt <+∞, i= 1,2, (1.12) for any y0 ∈ L2(Ω) there exist controls f ∈ L2(O ×(0, T)) and associated Nash equilibria
(v1, v2) such that the corresponding solutions to (1.1) satisfy (1.9).
Roughly speaking, the assumption (1.11) means that it is important for us to get followers with moderate L2 norms. On the other hand, the assumption (1.12) means that both y
1,d andy2,d approachy ast→T.
lose the convexity of the functionalsJi and the Nash equilibrium condition (1.4) is not neces-sarily equivalent to (1.5) and (1.6). For this reason, it is convenient to weaken the definition of equilibrium as follows:
Definition 1. Let f ∈L2(O ×(0, T))be given. The pair (v1, v2) is a Nash quasi-equilibrium when the conditions (1.5) and (1.6) are satisfied.
For the semilinear case, we have the following result:
Theorem 2. Let us assume that F ∈W1,∞(R)and the µi>0are sufficiently large. Let y be
the unique solution to (1.7) associated to the initial state y0 ∈L2(Ω)and let us assume that (1.12)holds, where ρˆis the weight furnished by Theorem 1. Then, for each y0 ∈L2(Ω), there exist controls f ∈ L2(O ×(0, T)) and associated Nash quasi-equilibria (v1, v2) such that the corresponding solutions to (1.1) satisfy (1.9).
A natural question is whether there are semilinear systems for which the concepts of Nash equilibrium and Nash quasi-equilibrium are equivalent. The answer is furnished by the following result:
Proposition 1. Let us assume that F ∈W2,∞(R) andyi,d ∈L∞(Oi,d×(0, T)) for i= 1,2.
Suppose that y0 ∈H01(Ω) (resp. y0 ∈L2(Ω)) and N ≤14 (resp. N ≤12). Then, there exists
C >0 such that, if f ∈L2(O ×(0, T)) and theµ
i satisfy
µi ≥C(1 +kfkL2(O×(0,T))), the conditions (1.4) and (1.5)-(1.6) are equivalent.
In this paper, we also analyze if a result like Theorem 1 holds true when the followers are constrained to belong to appropriate convex setsUi⊂L2(Oi×(0, T)). Thus, letI
1 andI2 be two nonempty closed intervals with 0∈I1∩I2, let us take
Ui={v∈L2(Oi×(0, T)) : v(x, t)∈Ii a.e.}, i= 1,2, (1.13) and let us suppose that the minimization of J1 and J2 in (1.4) is subject to the restrictions
ˆ
v1∈ U
1 and vˆ2∈ U2.
The controllability result is the following:
Theorem 3. Let us assume that F ≡0 and the µi >0 are sufficiently large. Let y be the unique solution to (1.7)associated to the initial statey¯0 ∈L2(Ω). Then, for eachy
0 ∈L2(Ω), there exist controlsf ∈L2(O ×(0, T))and associated Nash equilibria (v1, v2)∈ U1× U2 such that the corresponding solutions to (1.1) satisfy (1.9).
which is obviously the most interesting situation. On the other hand, the analysis and results also hold, after appropriate modifications, for mfollowers with m≥2.
The rest of the paper is organized as follows.
In Section 1.2, we prove Theorem 1, which concerns the linear case. This result will be strongly used in the other sections. In Section 1.3, we prove Theorem 2 and Proposition 1. As a consequence, we see that the Stackelberg-Nash strategy can be applied to nonlinear problems and, also, that under adequate hypotheses onF, we still obtain a Nash equilibrium. Section 1.4 deals with the proof of Theorem 3. Finally, we present some additional comments and questions in Section 1.5.
1.2
The linear case
In this section we prove Theorem 1. The proof is long and, for clarity, has been decomposed in two parts. In Section 2.4 we recall the existence, uniqueness and characterization of a Nash equilibrium (for fixed but arbitrary f); then, in Section 1.2.2, we prove the desired controllability result.
By the linearity of the problem, we may reduce the exact controllability to the trajectories to a null controllability property. In fact, after the change of variabley=z+y, it is immediate to see from (1.1) and (1.7) for F ≡0 thatz is the solution to the problem
zt−∆z+a(x, t)z=f1O+v11O1+v
21
O2 in Q,
z= 0 on Σ,
z(·,0) =z0 in Ω,
(1.14)
wherez0 =y0−y0.
It is clear that y(x, T) ≡ y(x, T) if and only if z(x, T) ≡ 0. Also, we can write the functionals Ji in (1.2) in terms of z, which gives
Ji(f;v1, v2) =
αi
2
ZZ
Oi,d×(0,T)
|z−zi,d|2dx dt+µi 2
ZZ
Oi×(0,T)
|vi|2dx dt, i= 1,2,
wherezi,d :=yi,d−y for i= 1,2.
1.2.1 Nash equilibrium
In this section, we recall an existence/uniqueness result concerning a Nash equilibrium, in the sense of (1.4), for any f ∈ L2(O ×(0, T)). Then, we recall a result which characterizes this Nash equilibrium in terms of the solution to an adjoint system. These results are due to Díaz and Lions; see [31, 32, 62].
Existence and uniqueness
Let us introduce the spaces Hi:=L2(Oi×(0, T))and H:=H1× H2 and let us consider the operatorsLi ∈ L(Hi;L2(Q))with Livi =zi, wherezi is the solution to the system
zi
t−∆zi+a(x, t)z=vi1Oi in Q,
zi = 0 on Σ,
zi(x,0) = 0 in Ω.
By definition, for any control f, the pair (v1, v2) is a Nash equilibrium if and only if it satisfies (1.5) and (1.6), that is to say,
αi
ZZ
Oi,d×(0,T)
(z−zi,d)widx dt+µi
ZZ
Oi×(0,T)
viˆvidx dt= 0 ∀vˆi∈ Hi, (1.15) wherewi is the derivative ofz with respect to vi in the directionvˆi.
Note that
wi
t−∆wi+a(x, t)wi= ˆvi1Oi in Q,
wi= 0 on Σ,
wi(x,0) = 0 in Ω.
Consequently,Livˆi=wi. We also have z=L1v1+L2v2+u, where
ut−∆u+a(x, t)u=f1O in Q,
u= 0 on Σ,
u(x,0) =z0 in Ω.
Therefore, we may rewrite (1.15) in the form
αi
ZZ
Oi,d×(0,T)
(L1v1+L2v2−(zi,d−u))Livˆidx dt
+µi
ZZ
Oi×(0,T)
vivˆidx dt= 0, ∀vˆi∈ Hi or ZZ
Oi×(0,T)
αiL∗i((L1v1+L2v2−(zi,d−u))1Oi,d)+µiv
ivˆidx dt= 0, ∀vˆi∈ Hi, whereL∗
i :L(L2(Q);Hi)is the adjoint of Li.
In other words,(v1, v2) is a Nash equilibrium if and only if
αiL∗i((L1v1+L2v2)1Oi,d) +µiv
i=α
iL∗i((zi,d−u)1Oi,d) in Hi, i= 1,2.
Let us introduce the operator L∈ L(H;H), given by L(v1, v2) = (α1L∗
1((L1v1+L2v2)1O1,d) +µ1v
1, α
2L∗2((L1v1+L2v2)1O2,d) +µ2v
2), (1.16) for all (v1, v2)∈ H. Then, the task is to prove the existence and uniqueness of a solution for the equation
L(v1, v2) = Ψ, (v1, v2)∈ H, (1.17)
where
Ψ = (α1L∗1((z1,d−u)1O1,d), α2L
∗
2((z2,d−u)1O2,d)). (1.18)
Proposition 2. Let us assume that
α1k1O1,dL2k(1)<4µ2 and α2k1O2,dL1k(2)<4µ1, (1.19)
where k · k(i) denotes the norm in the space L(H3−i;L2(Oi,d ×(0, T))). Then L is an iso-morphism. In particular, for eachf ∈L2(O×(0, T)), there exists exactly one Nash equilibrium
(v1(f), v2(f)) in the sense of (1.4).
Proof: From (1.16) and Young’s inequality, we observe that
(L(v1, v2),(v1, v2))H =
2
X
i=1
µikvik2Hi+
2
X
i,j=1
αi(Ljv(j), Livi)L2(O
i,d×(0,T))
≥ 2
X
i=1
µikvik2Hi+αikLiv
ik2 L2(O
i,d×(0,T))
− 2
X
i=1
αi
kLivik2L2(O
i,d×(0,T))+
1 4kL3−iv
3−ik2 L2(O
i,d×(0,T))
≥ 2
X
i=1
µi−
α3−i
4 k1O3−i,dLik
2 (3−i)
kvik2Hi.
Therefore,
(L((v1, v2),(v1, v2))H≥γk(v1, v2)k2
H ∀(v1, v2)∈ H, (1.20)
whereγ = mini{µi−α3−ik1O3−i,dLik
2
(3−i)}>0, see (1.19). Now, let us introduce the bilinear form a:H × H 7→R, with
a((v1, v2),(ˆv1,vˆ2)) := (L((v1, v2),(ˆv1,vˆ2)))H.
From the definition of the operator Land the inequality (1.20), we readily see that a(·,·) is
continuous and coercive onH. Consequently, the Lax-Milgram Theorem implies that, for any
Φ∈ H′, there exists exactly one(v1, v2)∈ H satisfying
a((v1, v2),(ˆv1,vˆ2)) =hΦ,(ˆv1,vˆ2)iH′×H ∀(ˆv1,ˆv2)∈ H; (v1, v2)∈ H.
In particular, we get (1.17) and the proof is done.
From the proof, it becomes clear that, under the assumptions of Proposition 2, for any
f ∈L2(O ×(0, T))the associated Nash equilibrium (v1(f), v2(f))satisfies
k(v1(f), v2(f))kH ≤C 1 +kfkL2(O×(0,T)), (1.21) whereC depends onΩ,O, T,Oi,Oi,d, αi, µi,kz0kandkakL∞(Q). These estimates will be used
below. Notice that, in view of (1.21), the state zassociated to f and (v1(f), v2(f))satisfies kzkL2(0,T;H1
Characterization of the Nash equilibrium
In this section, we express the followers v1(f) and v2(f) in terms of a (new) adjoint variable.
Letf ∈L2(O ×(0, T))be given. For any(v1, v2)∈ H, let us consider the associated state
z (the solution for (1.14)). In view of (1.15), it is very natural to introduce the adjoint states
φi (i= 1,2), with
−φit−∆φi+a(x, t)φi =αi(z−zi,d)1Oi,d in Q,
φi = 0 on Σ,
φi(·, T) = 0 in Ω.
Using integration by parts, we see that (v1, v2)is a Nash equilibrium if and only if
ZZ
Oi×(0,T)
φi+µiviˆvidx dt= 0 ∀vˆi∈ Hi; vi ∈ Hi. This directly implies that
vi =−1
µi
φi
Oi×(0,T)
for i= 1,2.
Let us gather all these informations in the same system. We obtain the following:
zt−∆z+a(x, t)z=f1O−
2
X
i=1
1
µi
φi1Oi in Q,
−φit−∆φi+a(x, t)φi =αi(z−zi,d)1Oi,d in Q,
z= 0, φi = 0 on Σ, z(x,0) =z0(x), φi(x, T) = 0 in Ω.
(1.23)
Recall that our main objective is to prove the null controllability of z at time t = T. Therefore, the task is to find a distributed controlf ∈L2(O ×(0, T)) such that the solution to (1.23) satisfies
z(x, T) = 0 in Ω. (1.24) 1.2.2 Null controllability
In this section, we achieve the proof of Theorem 1.
We will establish an observability inequalityfor the system
−ψt−∆ψ+a(x, t)ψ= 2
X
i=1
αiγi1Oi,d in Q,
γti−∆γi+a(x, t)γi =−1
µi
ψ1Oi in Q,
ψ= 0, γi = 0 on Σ, ψ(x, T) =ψT(x), γi(x,0) = 0 in Ω,
(1.25)
Proposition 3. Assume that (1.10)holds and theµi are sufficiently large. There existC >0, only depending onΩ,O, T,Oi,Od, αi, µi andkakL∞(Q) and a weight functionρˆ= ˆρ(x, t), only
depending on Ω, O, T and kakL∞(Q), such that for any ψT ∈ L2(Ω) the following inequality
holds true for the solution (ψ, γi) of (1.25):
Z
Ω
|ψ(x,0)|2dx+
2 X i=1 ZZ Q ˆ
ρ−2|γi|2dx dt≤C
ZZ
O×(0,T)
|ψ|2dx dt. (1.26)
Let us assume for a moment that Proposition 3 holds and let us prove the controllability result in Theorem 1. From a well known duality argument, we have that, for any z0 ∈L2(Ω) and anyψT ∈L2(Ω),
Z
Ω
z(x, T)ψT(x)−z0(x)ψ(x,0)dx=
ZZ
O×(0,T)
f ψ dx dt
− 2 X i=1 αi ZZ
Od×(0,T)
zi,dγidx dt,
(1.27)
where(z, φ1, φ2) and(ψ, γ1, γ2)are the solutions to (1.23) and (1.25), respectively associated to z0 andψT.
Thus, to prove the null controllability property is equivalent to find, for each z0 ∈L2(Ω), a controlf such that, for anyψT ∈L2(Ω), one has
ZZ
O×(0,T)
f ψ dx dt=−
Z
Ω
z0(x)ψ(x,0)dx+
2
X
i=1
αi
ZZ
Od×(0,T)
zi,dγidx dt.
There are several ways to show that (3.4) implies the existence of such a control. They rely on well known arguments. For completeness, let us sketch one of them.
For each ε >0, let us consider the following functional:
Fǫ(ψT) :=
1 2
ZZ
O×(0,T)
|ψ|2dx dt+ǫkψTk+
Z
Ω
z0(x)ψ(x,0)dx
− 2 X i=1 αi ZZ
O×(0,T)
zi,dγidx dt ∀ψT ∈L2(Ω).
It is then clear thatFε:L2(Ω)7→Ris continuous and strictly convex. Moreover,
Fǫ(ψT)≥
1 4
ZZ
O×(0,T)
|ψ|2dx dt
−C
Z
Ω
|z0|2dx+
2
X
i=1
α2i
ZZ
Od×(0,T)
ˆ
ρ2|zi,d|2dx dt
!
+εkψTk,
where C and ρˆ are furnished by Proposition 1. Consequently, Fǫ is also coercive in L2(Ω). Note that, here, we have used the assumption (1.12) onzi,d=yi,d−y¯.
LetψT
ǫ be the unique minimizer ofFǫ. Then, either ψǫT = 0 or
Suppose thatψTǫ 6= 0. In this case, we have
ZZ
O×(0,T)
ψεψ dx dt+ǫ(
ψTε
kψT εk
, ψT) +
Z
Ω
z0(x)ψε(x,0)dx −
2
X
i=1
αi
ZZ
O×(0,T)
zi,dγidx dt= 0 ∀ψT ∈L2(Ω),
(1.28)
where we have denoted by(ψǫ, γǫ1, γǫ2)the solution to (1.25) corresponding toψT=ψǫT. Taking
f =fǫ :=ψǫ1O×(0,T) in (1.27), denoting by zǫ the associated state and comparing to (1.28), we see that Z
Ω
zǫ(x, T)− ǫ kψT
ǫ k
ψǫT
ψT(x)dx= 0 ∀ψT ∈L2(Ω),
which implies
kzǫ(·, T)k=ε. (1.29) On the other hand, from (1.28) and (3.4) we also have
kfǫkL2(O×(0,T))≤C
Z
Ω
|z0|2dx+
2
X
i=1
ZZ
Oi,d×(0,T)
ˆ
ρ2|zi,d|2dx dt
!1/2
, (1.30)
that is,fǫ is uniformly bounded inL2(O ×(0, T)). Obviously, we also have (1.29) and (1.30) when ψǫT = 0 and we take fǫ= 0.
Consequently, we can easily deduce a uniform estimate forzǫ. Then, taking limits asǫ→0, we conclude that null controllability holds.
This ends the proof of Theorem 1.
Remark 1. The leader control we have constructed is the unique solution to the extremal problem (1.8)–(1.9). This claim can be justified as follows:
1. For each ε > 0, there exists exactly one minimal L2 norm control fǫ such that the associated state, i.e. the corresponding solution to (1.23), satisfies
kzǫ(·, T)k ≤ε.
2. From the weak lower semicontinuity of the terms in Jε, it is clear that any weak limit of a subsequence of{fε}minimizes the L2 norm in the family of the null controls forz.
Consequently, this is the case forf.
Proof of Proposition 3. The assumption (1.10) will be used here.
Let ω be a non-empty open set satisfying ω ⊂⊂ Od∩ O. Let η0 =η0(x) be a function
satisfying (
η0 ∈C2(Ω),η0 >0inΩ,η0 = 0 on∂Ω, |∇η0|>0 inΩ\ω.
Let us introduce the weight functions
α(x, t) = e
2λkη0k∞
−eλ(kη0k∞+η0(x))
t(T−t) , ξ(x, t) =
eλ(kη0k∞+η0(x))
t(T−t) (1.31)
and the notation
Im(ψ) :=sm−4λm−3
ZZ
Q
e−2sαξm−4(|ψt|2+|∆ψ|2)dx dt
+sm−2λm−1
ZZ
Q
e−2sαξm−2|∇ψ|2dx dt
+smλm+1
ZZ
Q
e−2sαξm|ψ|2dx dt.
From the usual Carleman inequalities (see [38, 54, 33]), we have:
I3(ψ)≤C
ZZ
Ω×(0,T)
e−2sα|α1γ11O1,d +α2γ
21
O2,d|
2dx dt
+s3λ4
ZZ
ω×(0,T)
e−2sαξ3|ψ|2dx dt
!
.
(1.32)
Since (1.10) holds, we introduce h:=α1γ1+α2γ2. One has
ZZ
Q
e−2sα|h|2dx dt≤I0(h) ≤C s−3λ−2
ZZ
Q
e−2sαξ−3|ψ|2dx dt+λ
ZZ
ω×(0,T)
e−2sα|h|2dx dt
! (1.33)
for all largesand λand someC only depending on Ω,ω and T.
But, inω×(0, T), one hash=−ψt−∆ψ+aψ. Consequently, by introducing an appropriate cut-off function ζ and integrating by parts, we get
ZZ
ω×(0,T)
e−2sα|h|2dx dt≤
ZZ
ω′×(0,T)
ζ e−2sαh(−ψt−∆ψ+aψ)dx dt ≤εI0(h) +Cεs4λ5
ZZ
ω′×(0,T)
ξ4e−2sα|ψ|2dx dt,
(1.34)
whereω′ is a new open set satisfying ω ⊂ω′ ⊂ Od∩ O. From (1.32), (1.33) and (1.34), we
find that, for some C >0,
I3(ψ) +I0(h)≤C
ZZ
ω′×(0,T)
ξ4e−2sα|ψ|2dx dt. (1.35)
Let ρˆ= ˆρ(x, t) be a positive nondecreasing C1 function which blows up at t=T. From the PDE satisfied byγi in (1.25), we readily see that
1 2 d dt Z Ω ˆ
ρ−2|γi|2dx+
Z
Ω
ˆ
ρ−2|∇γi|2dx=−1
µi
Z
Oi
ˆ
ρ−2ψγidx−
Z
Ω
ˆ
ρ−3ρˆt|γi|2dx
≤ 1
µ2i
Z
Oi
ˆ
ρ−2|ψ|2dx+
Z
Ω
ˆ
and, using Gronwall Lemma and the fact that γi(x,0)≡0, it follows that
Z
Ω
ˆ
ρ−2|γi|2dx
(τ)≤C
ZZ
Oi×(0,T)
ˆ
ρ−2|ψ|2dx dt (1.36) for all τ ∈[0, T].
Let us chooseρˆsatisfyingρ > ξˆ −3/2esαinQ; then, the right hand side of (1.36) is bounded, up to a multiplicative constant, byI3(ψ). Therefore, in view of (1.35) and (1.36), we see that
I3(ψ) + 2 X i=1 ZZ Q ˆ
ρ−2|γi|2dx dt≤C
ZZ
O×(0,T)
ξ4e−2sα|ψ|2dx dt. (1.37)
Observe that the choice of ρˆis determined by the Carleman weightξ−32esα, that depends on Ω,O,T and kakL∞(Q); but ρˆcan be chosen independent of the O,Od,αi andµi.
To end the proof, we need an energy estimate for ψ.
Multiplying the first PDE in (1.25) by ψ and integrating inΩ×(τ, t), we have kψ(·, τ)k2− kψ(·, t)k2+
ZZ
Ω×(τ,t)
|∇ψ|2dx ds
≤C
Z t
τ
kψ(·, s)k2ds+C
Z t
τ
k(α1γ1+α2γ2)1Odk
2ds
for all τ, t∈[0, T], withτ ≤t. For the γi, in view of the second and third PDE in (1.25), we get:
kγi(·, s)k2− kγi(·, τ)k2 ≤C
Z s
τ
kγi(·, σ)k2dσ+ C
µ2 i
ZZ
Oi×(τ,s)
|ψ(x, σ)|2dx dσ (1.38) for all s∈[τ, t]. Using again Gronwall Lemma, the following is found:
kγi(·, s)k2 ≤C
kγi(·, τ)k2+
Z s
τ
kψ(·, σ)k2dσ
.
Consequently,
kψ(·, τ)k2 ≤ kψ(·, t)k2+C
"Z t
τ
kψ(·, s)k2ds+
2
X
i=1
kγi(·, τ)k2
#
for all τ, t∈[0, T], withτ ≤t, whence
kψ(·, τ)k2 ≤C kψ(·, t)k2+
2
X
i=1
kγi(·, τ)k2
!
.
In particular, we find that
kψ(·,0)k2≤Ckψ(·, t)k2, ∀t∈[0, T].
This yields
kψ(·,0)k2 ≤ C
T
ZZ
Ω×(T /4,3T /4)