Programa de Pós-Graduação em Engenharia Mecânica
- Mestrado
CONTROLE ADAPTATIVO APLICADO EM DOIS ELOS DE UM
ROBÔ MANIPULADOR ELETROPNEUMÁTICO DE TRÊS GRAUS
DE LIBERDADE CARTESIANO
por
Oldineia Batista de Souza
Dissertação de Mestrado apresentada à Universidade Federal da Paraíba
para obtenção do grau de Mestre.
CONTROLE ADAPTATIVO APLICADO EM DOIS ELOS DE UM
ROBÔ MANIPULADOR ELETROPNEUMÁTICO DE TRÊS GRAUS
DE LIBERDADE CARTESIANO
Dissertação apresentada ao programa de
Pós-Graduação
em
Engenharia
Mecânica da Universidade Federal da
Paraíba, em cumprimento às exigências
para obtenção do Grau de Mestre.
Orientador: Prof. Dr. José Antonio Riul
S729c Souza, Oldineia Batista de..
Controle adaptativo aplicado em dois elos de um robô manipulador eletropneumático de três graus de liberdade cartesiano / Oldineia Batista de Souza.- João Pessoa, 2010.
63f.
Orientador: José Antonio Riul
Dissertação (Mestrado) – UFPB/CT
1. Manipuladores robóticos. 2. Robótica. 3. Identificação. 4. Controle adaptativo. 5. Engenharia Mecânica.
Dedico este trabalho aos meus pais José
Batista de Souza e Maria José de Souza,
responsáveis pelo alicerce no qual
estruturei a minha vida produtiva, às
minhas irmãs Ingrid, Andréa e Ethiane,
A Deus, simplesmente por ser o Tudo.
Ao professor José Antônio Riul pelo incansável apoio e preciosos ensinamentos. Ao professor Paulo Henrique de Miranda Montenegro, pelas inestimáveis colaborações no decorrer deste trabalho.
A professora Marizete, pelo incentivo e colaboração em vários estágios da minha vida acadêmica.
Aos professores de Licenciatura em Matemática da Universidade Federal Rural de Pernambuco, na qual fiz minha graduação.
A todos os professores, que lecionam no curso de Pós-Graduação de Eng. Mecânica, que colaboraram para que eu pudesse alcançar esta etapa tão importante da minha vida profissional.
Aos amigos que consegui conquistar entre os colegas da Pós-graduação, pela companhia e espírito de solidariedade demonstrada no decorrer deste trabalho.
ROBO MANIPULADOR ELETROPNEUMÁTICO DE TRÊS GRAUS
DE LIBERDADE CARTESIANO
RESUMO
O objetivo do presente trabalho é modelar e controlar em tempo real dois elos de um robô manipulador eletropneumático de três graus de liberdade (3GDL) cartesiano. O robô manipulador é constituído basicamente por três válvulas eletropneumáticas proporcionais e por três cilindros pneumáticos, e seus parâmetros são identificados em tempo real pelo algoritmo dos Mínimos Quadrados Recursivos (MQR). De posse do modelo do sistema, controladores adaptativos de Dahlin-Variância Mínima (DMV) são projetados e implementados visando o controle de posição do órgão efetuador do robô manipulador. Finalizando, são apresentados resultados experimentais, como avaliação do desempenho obtido pelo robô manipulador.
THREE DEGREES OF FREEDOM
ABSTRACT
The objective of this work is to model and to control in real-time two links of a cartesian electropneumatic manipulator robot with three degrees of freedom (3DOF). The manipulative robot basically consists of three proportional eletropneumatic valves and three pneumatic cylinders, and their parameters are identified in real-time by the Recursive Least Squares (RLS) method. In the possession of the system’s model, adaptive of Dahlin Minimum Variance (DMV) are planned and implemented aiming the position control of the manipulative robot’s effecter organ. Finally, experimental results are presented, as a way to assess the manipulative robot’s performance.
CAPÍTULO 1 ... 01
1.1 INTRODUÇÃO ... 01
1.2 CARACTERÍSTICAS DO ROBÔ MANIPULADOR ... 01
1.3 HISTÓRICO ... 02
1.4 JUSTIFICATIVA E PROPOSTA DO MESTRADO ... 04
1.5 METODOLOGIA ... 05
1.6 ORGANIZAÇÃO DO TRABALHO ... 05
CAPÍTULO 2 ... 07
2.1 INTRODUÇÃO ... 07
2.2 DESCRIÇÃO DO RÔBO MANIPULADOR ELETROPNEUMÁTICO DE TRÊS GRAUS DE LIBERDADE ... 07
2.2.1 Bancada de Testes e compressor... 08
2.2.2 Principais componentes que compõem o Robô Manipulador... 10
2.2.3 Sistema de aquisição de dados ... 13
2.3 CONCLUSÃO ... 14
CAPÍTULO 3 ... 15
3.1 INTRODUÇÃO ... 15
3.2 IDENTIFICAÇÃO DO ROBÔ MANIPULADOR ... 16
3.3 ESCOLHA DA ESTRUTURA DO MODELO...20
3.4 ESTRUTURA DO MODELO ... 30
3.5 CONCLUSÃO ... 31
CAPÍTULO 4 ... 32
4.1 INTRODUÇÃO ... 32
4.3PROCEDIMENTOS PARA O PROJETO DO CONTROLADOR DMV
COM ALTERAÇÃO ... 40
4.4 RESULTADOS... 45
4.5 CONCLUSÃO ... 53
CAPÍTULO 5 ... 54
5.1 CONSIDERAÇÕES FINAIS ... 54
REFERENCIAS BIBLIOGRAFICAS ... 56
APÊNDICE A... 58
A.1 IDENTIFICAÇÃO DE SISTEMAS ... 58
Figura 1.1- Diagrama de bloco do controlador STR explícito e de planta...04
Figura 2. 1- Robô manipulador eletropneumático de 3 GDL...08
Figura 2.2- Bancada de Testes...09
Figura 2.3- Compressor...10
Figura 3.1-Modelos para o elo X do robô manipulador...24
Figura 3.2-Modelos para o elo Z do robô manipulador...24
Figura 3.3. Excitação no elo X do Robô Manipulador...26
Figura 3.4. Excitação no elo Z do Robô Manipulador...27
Figura 3.5. Saída estimada com o MQR e real, do elo X do robô manipulador...27
Figura 3.6. Saída estimada com o MQR e real, do elo Z do robô manipulador...28
Figura 3.7. Erro de previsão para o modelo de segunda ordem do elo X do robô manipulador...28
Figura 3.8. Erro de previsão para o modelo de segunda ordem do elo Z do robô manipulador...29
Figura 3.9. Parâmetros estimados do elo X do robô manipulador...29
Figura 3.10. Parâmetros estimados do elo Z do robô manipulador...30
Figura 4.1- Estrutura do controlador DMV e planta...39
Figura 4.2- Estrutura do controlador DMV com alteração e planta...40
Figura 4.3- Sinal de referência do elo X do robô manipulador...46
Figura 4.4- Sinal de referência do elo Z do robô manipulador...46
Figura 4.5 – Referência e resposta do elo X do robô manipulador, sob ação do controlador DMV com alteração...47
Figura 4.6 – Referência e resposta do elo Z do robô manipulador, sob ação do controlador DMV com alteração...47
Figura 4.7– Erro de posição do elo X do robô manipulador...49
Figura 4.8 – Erro de posição do elo Z do robô manipulador...50
Figura 4.9 – Variável de controle do elo X do robô manipulador...51
Tabela. 2.1. Dados técnicos do compressor...10
Tabela. 2.2. Dados técnicos dos cilindros pneumáticos...11
Tabela. 2.3. Dados técnicos das válvulas proporcionais eletropneumáticas...12
Tabela. 2.4. Dados técnicos das réguas potenciométricas...12
Tabela 3.1-Parâmetros de inicialização do programa computacional Identmqr...19
Tabela 3.2- Parâmetros do modelo do sistema referentes aos elos X e Z do robô manipulador...23
Tabela 3.3. Índice de desempenho do elo X...25
Tabela 3.4. Índice de desempenho do elo Z...25
Tabela. 4.1. Parâmetros de inicialização do programa computacional controledmvcompleto1...45
Tabela. 4.2. Especificações de desempenho impostas ao sistema...45
Tabela. 4.3. Desempenho do elo X do robô manipulador, relativo às especificações de desempenho estabelecidas...48
- erro de previsão
( 1)
K t - ganho do estimador
'( 1)
K t - ganho do estimador com fator de esquecimento
( )
P t - matriz de covariância
'( )
P t -matriz de covariância com fator de esquecimento
ˆ MQ
- vetor de parâmetros estimados pelo MQ
ˆ(t 1)
- vetor de parâmetros estimados pelo MQR
A (Z-1), B(Z-1) e C(Z-1)- polinômios característicos do sistema AIC- critério de informação de Akaike
-fator de esquecimento
p- parâmetro dos projetos dos controladores “ajuste de Dahlin”
Q- parâmetro dos projetos dos controladores R²- coeficiente de correlação múltipla
SEQ- somatório do erro quadrático
a
T -tempo de amostragem
u(t) - variável de controle y (t) - saída do sistema
e(t)- representa um ruído branco filtrado
p
n -representa o número de parâmetros
a
n -representa o número de pólos
b
n -representa o número de zeros
k -representa o atraso de transporte
ARMAX – Modelo Auto-regressivo com média móvel e entradas exógenas. ARX- Modelo auto-regressivo com entradas externas
MQR- Mínimos Quadrados Recursivos MV- Variância Mínima
CAPÍTULO 1
INTRODUÇÃO
1.1 INTRODUÇÃO
Este trabalho tem como objetivo modelar e controlar em tempo real dois elos de um robô manipulador eletropneumático de três graus de liberdade (3GDL) cartesiano. Este capítulo apresenta na seção 1.2 características dos robôs manipuladores, na seção 1.3 um breve histórico sobre controle de sistemas com ênfase em controladores adaptativos. A seção 1.4 apresenta a justificativa e proposta do mestrado, bem como os objetivos e contribuições, a seção 1.5 discorre sobre a metodologia adotada e por fim a seção 1.6 a organização do trabalho.
1.2 CARACTERÍSTICAS DO ROBÔ MANIPULADOR
Com relação à estrutura mecânica os robôs são classificados como sendo de coordenadas cartesianas pórtico, coordenadas cilíndricas, coordenadas esféricas, Scara, articulado ou antropomórfico e paralelo. O robô de coordenadas cartesianas /pórtico possui três juntas prismáticas, cujos eixos do movimento são coincidentes com um sistema de referência cartesiano (ROMANO, 2002).
O controle de posição do órgão efetuador de um robô pode ser realizado por técnicas convencionais e não convencionais. Projetos de controladores convencionais e não convencionais, podem utilizar modelos do sistema do tipo caixa branca, caixa preta ou caixa cinza. Os modelos de robôs do tipo caixa branca normalmente são não lineares, enquanto que os do tipo caixa preta normalmente são lineares e podem ser determinados de duas formas: “off line” ou “on line”. Os modelos “caixa preta” são utilizados em projetos de controladores adaptativos explícitos, e usam os parâmetros estimados do sistema em tempo real. Os controladores adaptativos operam em tempo real e assim resolvem problemas de variação de parâmetros e não linearidades de sistemas.
1.3 HISTÓRICO
ASTROM (1996a) cita que uma das primeiras referências sobre controle adaptativo se deu na década de 50. Na época a maior aplicação foi na indústria Aeronáutica, e sua maior motivação foi a utilização de estruturas adaptativas de controle no desenvolvimento de pilotos automáticos, já que o controle convencional com ganho fixo se comportava bem para um determinado tipo de condições, quando estas se alteravam, o sistema apresentava resultados indesejáveis. Porém, a falta de computadores adequados, de uma fundamentação teórica e um grave acidente ocorrido em um teste de vôo, fez com que o controle adaptativo não obtivesse muito sucesso (ASTROM, 1989).
Nas décadas de 70 e 80, se consolidou bastante os resultados, impulsionados pelo advento dos microcomputadores. O fato importante desta época foi pelo pioneirismo de ASTROM e WITTENMARCK na aplicação do processo de dinâmica desconhecida.
Na década de 90 ocorreu um bom desenvolvimento de controle adaptativo para sistemas não-lineares, bem como a abordagem sobre robustez desses controladores.
À medida que os controladores vêm sendo aprimorados novos recursos são incorporados para permitir maior flexibilidade e atender as classes mais amplas.
SEBORG (1986) apresenta uma classificação para as diversas técnicas de controle adaptativo, dividindo-se em quatro categorias: (I) controladores projetados através de Funções-Custo Quadráticas; (II) métodos de projeto na Teoria da Estabilidade; (III) Técnicas e Alocação de Pólos e (IV) outras abordagens.
Na classe I, estão inclusas as estratégias de: Variância Mínima (MV), Variância Mínima Generalizada (GMV), Dahlin- Variância Mínima (DMV) e o controlador (GPC). A estratégia de Variância Mínima (MV) será utilizada neste trabalho no Capítulo 4 em conjunto com outro controlador para a obtenção da lei de controle.
Adaptar significa mudar um comportamento para se ajustar às novas circunstâncias. Um sistema adaptativo é qualquer sistema que tem sido projetado com um ponto de vista adaptativo. Assim, um controlador adaptativo é definido como um controlador que pode modificar seu comportamento em resposta às mudanças na dinâmica do processo e na característica do distúrbio (ASTROM e WITTENMARK, 1995).
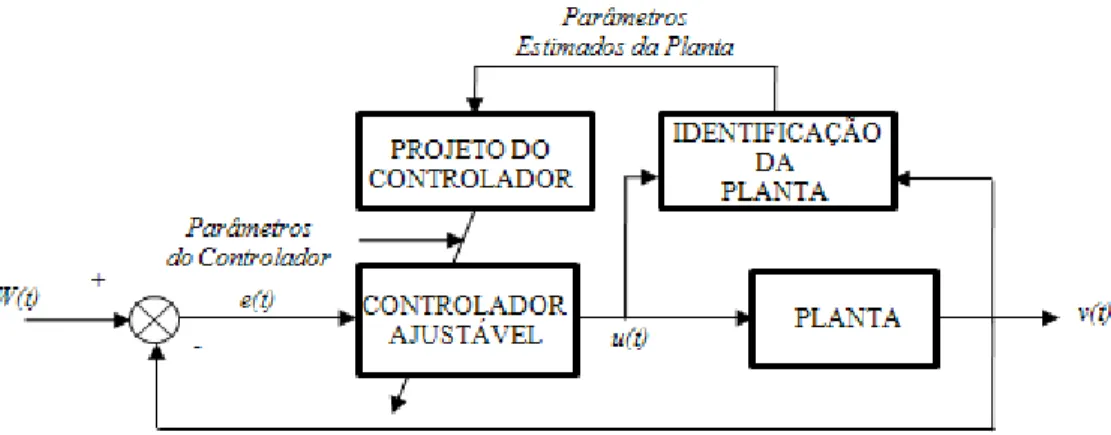
ASTROM e WITTENMARK (1995), ISERMANN et.al (1992) definem controlador adaptativo como sendo um controlador com parâmetro ajustáveis e um mecanismo de ajuste. O controlador auto-ajustável (STR) automatiza as tarefas de modelagem matemática, projeto e implementação da lei de controle.
Figura 1.1- Diagrama de bloco do controlador STR explícito e de planta.
1.4 JUSTIFICATIVA E PROPOSTA DO MESTRADO
Atualmente existem muitas pesquisas com controladores baseados na estratégia de Variância Mínima, porém há uma necessidade de realização de maiores investigações que envolvam servoatuadores em acompanhamento de trajetórias, sobretudo os pneumáticos. Outro fator importante que motivou a realização desta pesquisa é que poucos trabalhos práticos têm apresentado propostas para controle digital em tempo real, principalmente em robôs manipuladores eletropneumáticos.
A estratégia de Variância Mínima apresenta algumas desvantagens, como impossibilidade de tratar de sistemas de fase não-mínima, a impossibilidade de penalizar ações excessivas de controle, a não garantia de erro médio nulo em regime permanente e a falta de parâmetros de projetos do controlador. Porém, é bem flexível para combinações com outras estruturas, como exemplo pode-se citar a estratégia de controle proposta inicialmente por KHALIL (1992) que tinha como objetivo combinar as estratégias de Dahlin e Variância Mínima.
dois elos de um robô manipulador eletropneumático de (3GDL). Alguns trabalhos mais recentes envolvendo controle adaptativo serão evidenciados no decorrer desta dissertação.
O trabalho de pesquisa será conduzido teórica e experimentalmente, envolvendo uma revisão bibliográfica; estudados algoritmos aplicados a identificação, bem como dos controladores adaptativos existentes; projeto e implementação do DMV com alteração e por fim, avaliação do comportamento de dois elos do robô sob a ação do controlador. A seção 4.2 do capítulo 4 apresenta um breve histórico sobre o controlador DMV.
1.5 METODOLOGIA
Para o desenvolvimento da dissertação, serão seguidas as etapas:
Etapa 1- Definição da estrutura do modelo para o manipulador, uma vez definida e validada a estrutura de modelo, os elos do manipulador serão identificados recursivamente por meio do estimador (MQR).
Etapa 2- Projeto do controlador DMV com alteração, para isso se faz necessário a lei de controle, levando em consideração os parâmetros identificados a cada instante de amostragem.
Etapa 3- Realização dos testes experimentais sob a ação dos controladores projetados.
1.6 ORGANIZAÇÃO DO TRABALHO
Esta dissertação consta de quatro capítulos e um apêndice.
O capítulo 1 apresenta as características do robô manipulador eletropneumático; um breve histórico sobre controle, em particular o controle adaptativo; a justificativa e proposta da dissertação, incluindo os objetivos e contribuições; e por fim a metodologia a ser aplicada para conduzir e alcançar os objetivos esperados.
O capítulo 2 apresenta uma breve descrição do sistema experimental em estudo, o “Robô Manipulador Eletropneumático de Três Graus de Liberdade cartesiano”.
O capítulo 4 aborda a estratégia de controle de Dahlin-Variância Mínima (DMV) aplicado para o projeto de controle de posição dos elos X e Z do Robô Manipulador Eletropneumático de Três Graus de Liberdade (3 GDL) cartesiano.
No capítulo 5 as conclusões finais desse trabalho são apresentadas.
CAPÍTULO 2
DESCRIÇÃO DO SISTEMA EXPERIMENTAL
2.1 INTRODUÇÃO
Este capítulo apresenta uma breve descrição do sistema experimental em estudo, o “Robô Manipulador Eletropneumático de Três Graus de Liberdade”. A seção 2.2 apresenta o rôbo manipulador. Na seção 2.2.1 apresenta-se a bancada de testes utilizada para realização dos ensaios, com os seus principais componenetes, e a comunicação do sistema computacional com o robô manipulador em estudo, além do compressor utilizado para o acionamento das válvulas proporcionais eletropneumáticas instaladas no rôbo. Na seção 2.2.2 comenta-se sobre os componentes que compõem o rôbo, suas características e especificações técnicas e em seguida na seção 2.2.3 é apresentado o sistema de aquisição de dados responsável pela conversão, aquisição de sinais e comunicação do robô manipulador com o sistema computacional no qual é inserido o programa computacional de identificação e o de controle do sistema. A seção 2.3 apresenta uma breve conclusão sobre o capítulo. O robô manipulador proposto em estudo, encontra-se localizado no Laboratório de Dinâmica do Departamento de Engenharia Mecânica do Centro de Tecnologia da Universidade Federal da Paraíba (UFPB).
2.2 DESCRIÇÃO DO RÔBO MANIPULADOR ELETROPNEUMÁTICO DE TRÊS GRAUS DE LIBERDADE
Neste trabalho, os elos que se deslocam nas direções X e Z, serão denominados de elos X e Z, terão suas posições controladas enquanto que o elo na direção Y permanecerá numa posição fixa.
O robô manipulador funciona da seguinte forma: o compressor fornece ar comprimido para as válvulas eletropneumáticas proporcionais (5) de tensão de 24 VDC e sinais analógicos em tensão de 0 a 5 VDC, que acionam os cilindros pneumáticos (1) de dupla ação e haste simples, dando o movimento ao órgão efetuador. Uma placa de entrada e saída de dados é usada para exitar as válvulas eletropneumáticas proporcionais e captar os sinais medidos pelas réguas potenciométricas (2).
1-cilindros pneumáticos; 2-réguas potenciométricas; 3-guias lineares; 4-patinas; 5-válvulas proporcionais eletropneumáticas; 6-dutos de condução dos fluxos de ar.
Figura 2. 1- Robô manipulador eletropneumático de 3 GDL
2.2.1 Bancada de Testes e compressor
identificação do modelo e implementação da lei de controle do robô manipulador é realizada através de programas computacionais desenvolvidos nas plataformas LabVIEW e Matlab. A Figura. (2.3) apresenta o compressor de ar da marca SHUZ, modelo MSL 10 ML/175 e a Tab. (2.1) as suas especificações. O compressor fornece o ar comprimido que aciona as válvulas proporcionais eletropneumáticas (5) através dos dutos de condução dos fluxos de ar (6).
Figura 2.3-Compressor de ar
Tabela. 2.1. Dados técnicos do compressor de ar
Modelo/Fabricante
MSL 10 ML-175 / SCHUZ
Peso Bruto Peso líquido
90 kg
81 kg Deslocamento teórico 10 pés3/min- 283 l/min
Pressão de operação
máxima 8,3 MPa (83 bar) Potência 2 hp-1,5 kw Volume do reservatório 178 l
RPM 3430
2.2.2 Principais componentes que compõem o Robô Manipulador
Três cilindros pneumáticos de dupla ação corforme as especificações da Tab. (2.2). Os elos X e Z, ambos com 400 mm de curso, e o elo Y, com 200 mm de curso. Cilindro pneumático: são cilindros de dupla ação, com ação do ar comprimido nos dois sentidos de movimento; avanço e retorno. São comandados por válvulas proporcionais eletropneumáticas de 4 ou 5 vias.
Tabela. 2.2. Dados técnicos dos cilindros pneumáticos
Modelo/Fabricante
CWEA 03273310X0400/WERK-SCHOTT CWEA
03273310X0200/WERK-SCHOTT Tipo
Diâmetro Curso efetivo
Tirantado 32mm
400 mm e 200 mm, respectivamente
Material da haste Pressão Tipo de vedação/êmbolo
SAE 1045 até 1,0 MPa (10 bar)
Bruna –N/sem êmbolo magnético Tipo de montagem Montagem básica
Êmbolo/ Camisa Ambos de alumínio
Fluido Ar comprimido filtrado
Temperatura ambiente Força Teórica a 6 bar, retorno Força Teórica a 6 bar, avanço
-10°C a +80°C (Bruna-N) 414,70 N
482,55 N
Tabela. 2.3. Dados técnicos das válvulas proporcionais eletropneumáticas
Modelo/Fabricante MPYE-5-1/8-HF-010-B/FESTO Diâmetro
Tipo de acionamento Pressão absoluta de trabalho
6 mm elétrico
0 a 1,0 MPa (10bar)
Vazão nominal padrão 700 l/min
Temperatura do meio 5°C a 40°C
Temperatura ambiente 0°C a 50°C
Meio operacional Ar comprimido filtrado, não lubrificado, grau de filtração 5µm Sentido do fluxo
Função de válvula
Não reversível
5/3 fechado
Três réguas potenciométricas corforme as especificações da Tab. (2.4). Os sistemas de medição de curso são empregados em combinação com atuadores para o posicionamento ou para o amortecimento eletrônico nas posições finais de curso.
Acoplado longitudinalmente no cilindro a régua potenciométrica ou sensor de posição, como também pode ser chamado, garante a leitura efetiva do posicionamento do atuador sendo parte essencial no conceito de controle em malha fechada para posicionadores pneumáticos
.
Tabela. 2.4. Dados técnicos das réguas potenciométricas
Modelo/Fabricante MLO-POT-500-TFL/ FESTO Curso
Princípio de medição: régua potenciométrica
500 mm analógico
Sinal de saída analógico
Resolução do trajeto 0,01 mm
Como os resultados obtidos pelas réguas potenciométricas são em tensão (V), criou-se uma função linear da seguinte forma, dada uma excitação , obtêm-se um valor do
deslocamento do cursor do cilindro pneumático em Volts através da régua potenciométrica, em seguida mede-se com uma escala métrica o quanto o cursor se deslocou sobre o cilindro peneumático. Este procedimento é para diversas excitações. Com esses dados em Volts e em milímetros fez-se um ajuste de curvas, obtendo-se:
mm v
X 88,690 X 1,829 (2.1)
mm v
Z 98,794 Z 5,378 (2.2) Onde:
v
X e Zv- tensões medidas nos cursos móveis dos transdutores potenciométricos.
X e Z- deslocamentos medidos nos cursos móveis dos transdutores/hastes dos cilindros em milímetros.
Fonte variável de corrente contínua, modelo MPL-3303 do fabricante Minipa, possui duas saídas variavéis e uma saída especial de 5 V fixa. É um equipamento utilizado para alimentar a válvula proporcional a uma tensão de 24 V, além das tensões auxiliares de alimentação dos transdutores de posição potenciométrica.
2.2.3 Sistema de aquisição de dados
O processo de aquisição e controle do manipulador é realizado através de uma placa NI USB 6009 fabricada pela National Instruments. A resolução é de 14 bits, taxa de amostragem 48 KS/s, faixa de tensão de entrada ±1 VDC a ±20 VDC, faixa de tensão de saída de 0 a 5 VDC, quatro canais de entradas diferenciais analógicos ou 8 simples e 2 canais de saída.
A placa faz a comunicação entre a planta e os algoritmos de identificação e controle através conversores digitais e analógicos. Para efeito de estudo, desprezando o elo Y, na bancada de testes foram usados quatro sinais analógicos: dois sinais de entrada e dois sinais de saída.
2.3 CONCLUSÃO
Neste capítulo foi apresentado o robô manipulador eletropneumático de três graus de liberdade (3GDL) cartesiano. Neste trabalho, os elos nas direções X e Z , terão suas posições controladas enquanto que o elo na direção Y permanecerá numa posição fixa. Foi
descrito o princípio de funcionamento do robô, dando-se ênfase aos elementos que o compõem, além de descrever suas especificações técnicas.
CAPÍTULO 3
MODELAGEM MATEMÁTICA DO SISTEMA
3.1 INTRODUÇÃO
Este capítulo trata do modelamento de dois elos do robô manipulador eletropneumático de três graus de liberdade (3 GDL) cartesiano. Os dois elos a serem analisados são paralelos aos eixos X e Z do sistema de referência mostrado na Fig. (2.1). A modelagem matemática de um sistema pode ser obtida através de leis físicas, conhecida como identificação caixa branca ou modelagem caixa branca; por técnicas de identificação paramétricas, conhecida como identificação caixa preta ou modelagem caixa preta e que dependem de dados reais do sistema, ou por identificação caixa cinza (AGUIRRE, 2007), como uma técnica que busca combinar as vantagens das duas identificações supracitadas.
Neste trabalho a técnica de identificação paramétrica é utilizada na obtenção dos parâmetros do sistema. Modelagem matemática paramétrica de sistemas é largamente utilizada em projetos de controladores adaptativos explícitos, dado que a atualização dos parâmetros a cada período de amostragem visa à adequação das características do sistema e as variações na sua dinâmica. O sistema será identificado pelo algoritmo dos Mínimos Quadrados Recursivos (MQR) (AGUIRRE, 2007). Para avaliação da qualidade dos modelos matemáticos obtidos através do algoritmo supracitado usam-se os índices de desempenho, a saber: coeficiente de correlação múltipla (R²), somatório do erro quadrático (SEQ) e o critério de informação de Akaike (AIC).
3.2IDENTIFICAÇÃO DO ROBÔ MANIPULADOR
A identificação de sistemas é uma área do conhecimento que estuda técnicas alternativas de modelagem matemática. Uma das características de uma dessas técnicas é que pouco ou nenhum conhecimento prévio do sistema é necessário e, conseqüentemente, tais métodos são referidos como modelagem (ou identificação) caixa preta ou modelagem empírica. (AGUIRRE, 2007). A identificação tipo caixa preta é utilizada no modelamento do robô manipulador sob análise. Neste modelamento, o algoritmo dos mínimos quadrados recursivos (MQR) é utilizado em tempo real para a identificação dos parâmetros do sistema. O robô manipulador é cartesiano, então os movimentos dos seus elos são desacoplados, logo a identificação é realizada de forma independente para cada elo; e assim o MQR apresentado a seguir de forma genérica, é utilizado para identificação de cada um dos dois elos.
Para um sistema físico de uma entrada, uma saída (SISO) e uma perturbação, existem algumas reapresentações matemáticas especialmente adequadas à identificação de sistemas usando-se algoritmos conhecidos para estimação de parâmetros.
Neste trabalho, os modelos para ambos os elos que compõem o manipulador robótico em estudo será do tipo ARX (Modelo auto-regressivo com entradas externas). (AGUIRRE, 2007; COELHO E COELHO, 2004; WITTENMARK, 1995 e LJUNG, 1999) e é da forma:
1 1
( ) ( ) k ( ) ( ) ( )
Onde:
1 1
1
( ) 1 ... na
na
A Z a Z a Z (3.2)
1 1
0 1
( ) ... nb
nb
B Z b b Z b Z (3.3)
A representação da Eq. (3.1) na forma de equações a diferenças é dada por:
1 2 0 1
( ) ( 1) ( 2)... na ( ) ( ) ( 1) ... nb ( ) ( )
y t a y t a y t a y t na b u t k b u t k b u t k nb e t
(3.4) A Eq. (3.4) pode ser apresentada por:
( ) T( ) ( ) ( )
y t
t
t e t (3.5)Onde:
( ) ( 1) ( 2) ... ( ) ( ) ( 1) ... ( )
T
t y t y t y t na u t k u t k u t k nb
(3.6)
1 2 0 1
( )t a a ...a b bna ...bnb
(3.7)
( )
T
t
- vetor de medidas( )t
- vetor de parâmetros
( )
u t - entrada do sistema
( )
y t - saída do sistema ( )
e t - ruído branco filtrado
i
a - pólos do sistema,1 i na
j
b -zeros do sistema, 1 j nb na- número de pólos do sistema
nb- número e zeros do sistema
k- atraso de transporte
Para um número N de medidas, tem-se que:
Y E (3.8)
Y- vetor de saída
- matriz de observação
ˆ ˆ
Y (3.9) O MQ é obtido pela minimização da função custo dado pela Eq. (3.10)
2
min
J
(3.10)
Onde: ˆ
Y Y
(3.11)
- erro de previsão
O estimador dos mínimos quadrados (MQ), também conhecido por estimador linear é dada pela Eq. (3.12)
1
ˆ T T
MQ Y
(3.12)
Onde:
ˆ MQ
- vetor de parâmetros estimados pelo MQ
A precisão das estimativas está associada com o tamanho dos elementos da matriz de covariância, que por definição é dada por:
1 T
P (3.13)
O MQ é adaptado resultando no algoritmo MQR. No MQR, as estimativas
calculadas no instante de tempo t, são atualizadas para obtenção dos parâmetrosˆ(t1).
ˆ(t 1) ˆ( )t K t( 1) (t 1)
(3.14)
Onde:
( ) ( 1) ( 1)
1 T( 1) ( ) ( 1)
P t t K t
t P t t
(3.15)
ˆ
( 1) ( 1) T( 1) ( )
t y t t t
(3.16)
( ) ( 1) ( 1) ( )
( 1) ( )
1 ( 1) ( ) ( 1)
T
T
P t t t P t
P t P t
t P t t
(3.17)
( 1)
( )
P t - matriz de covariância do estimador MQR
(t 1)
- erro de previsão do estimador MQR
ˆ(t 1)
- vetor de parâmetros estimados pelo MQR
Para aumentar a sensibilidade do estimador MQR na presença de variações de parâmetros do sistema, implementa-se o fator de esquecimento (
) evitando que os elementos da matriz de covariância tendam para zero, mantendo o estimador em alerta para rastrear dinâmicas variantes. Para
1, tem-se a mesma ponderação para as medidas e para 0,9 1 as medidas atuais terão ponderação maior.O algoritmo de estimação dos mínimos quadrados recursivos (MQR) com fator de esquecimento apresenta a seguinte forma (Ljung, 1999):
ˆ(t 1) ˆ( )t K t'( 1) (t 1)
(3.18)
Onde:
'( ) ( 1) '( 1)
( 1) '( ) ( 1)
T
P t t K t
t P t t
(3.19)
1 '( ) ( 1) ( 1) '( )
'( 1) '( )
( 1) '( ) ( 1)
T
T
P t t t P t
P t P t
t P t t
(3.20)
'( 1)
K t - ganho do estimador MQR com fator de esquecimento
'( )
P t -matriz de covariância do estimador MQR com fator de esquecimento
O programa computacional utilizado neste processo foi o Identmqr, escrito em
linguagem Matlab e implementado na plataforma LabVIEW, (veja Apêndice A).
A Tabela. (3.1) mostra os parâmetros de inicialização do programa Identmqr.
Tabela 3.1-Parâmetros de inicialização do programa computacional Identmqr.
Parâmetros Valores Iniciais
Vetor (0) Matriz P(0)
0,0
Fator de Esquecimento 0,97
A qualidade do modelo estimado pode ser verificada utilizando várias técnicas, dentre elas, tem-se o somatório do erro quadrático (SEQ), dado pela Eq. (3.21) e o coeficiente de correlação múltipla (R²), dado pela Eq. (3.22) (COELHO e COELHO, 2004).
21
ˆ
( ) ( )
N
j
SEQ y j y j
(3.21)
2
1 2
2
1
ˆ
( ) ( ) 1
( ) ( )
N
j
N
j
y j y j R
y j y j
(3.22)
Quando o valor de R² é igual a um, indica uma exata adequação do modelo para os dados medidos do processo e para R² entre 0,9 e 1,0; o modelo pode ser considerado suficiente para muitas aplicações práticas para controle.
Valor mais baixo do SEQ para o conjunto de dados de teste indica o melhor modelo. Os modelos matemáticos para os elos que compõem o manipulador robótico em estudo são obtidos através da identificação paramétrica em tempo real, utilizando o MQR. Os dados coletados são as excitações enviadas do computador para as duas válvulas eletropneumáticas proporcionais; ux(t), uz(t) e as respostas obtidas que são as posições das
duas hastes dos cilindros pneumáticos; x(t) e z(t).
3.3 ESCOLHA DA ESTRUTURA DO MODELO
necessárias à identificação. As principais etapas envolvidas na identificação estão ilustradas no Apêndice A.
Os sinais usados para excitar o sistema com mais de uma entrada, não devem estar correlacionadas entre si. Pois se os sinais de entrada estiverem correlacionados entre si, o algoritmo de identificação não saberá a que entrada atribuir um determinado efeito observado numa determinada saída. Características dinâmicas e estáticas do sistema que não forem excitadas não apareceram nos dados. O que não estiver nos dados não pode ser identificado (AGUIRRE, 2007).
Uma regra prática que normalmente funciona bem é, tendo-se definido o tempo de amostragem, manter constante cada valor escolhido aleatoriamente por um tempo, em torno de 3 a 5 intervalos de amostragem (AGUIRRE, 2007).
Após a realização de alguns ensaios e levando em consideração os parágrafos anteriores, foram obtidos os sinais de excitação para os elos X e Z do robô manipulador conforme mostrado na Fig. (3.3) e Fig. (3.4).
Para se determinar o tempo de amostragem existem vários critérios e um deles é o de Isermann citado por MALIK et al. (1991), que sugere que o tempo de amostragem Ta
possa ser escolhido segundo um critério que é baseado no tempo de estabelecimento da resposta à entrada degrau aplicada ao sistema. O valor de Ta pode ser escolhido entre os
intervalos mostrados na Eq. (3.23).
95% 95%
15 a 5
t t
T
(3.23)
Onde:
a
T : tempo ou período de amostragem;
95%
t : tempo necessário para que a resposta do sistema à entrada degrau atinja 95% do seu valor final.
Este critério garante que pelo menos cinco amostras do sinal de saída ao longo de sua trajetória de subida podem ser captadas pelo sistema de aquisição de dados.
foram excitados de um pulso e mediu-se o tempo com um cronômetro, que cada elo gastou para atingir 95% da resposta final. O tempo de amostragem (Ta) é dado pelo tempo total
(t) dividido pelo número de amostras () conforme (3.24).
a
t T (3.24)
O Tempo de amostragem determinado de acordo com a Eq. (3.23) que abrange os dois elos, nas direções X e Z, foi de 200 ms.
A escolha da ordem do sistema é uma importante tarefa na estimação dos parâmetros, se um modelo de ordem é empregado incorretamente, pode causar aumento no tempo de processamento do algoritmo. No trabalho foi utilizado o critério de Akaike (Akaike Information Criterion-AIC), dado pela Eq. (3.25), para a escolha da ordem dos modelos.
ln[ N] 2
AICN J p (3.25)
Onde: N é o número de medidas da experimentação e pé o número de parâmetros do
modelo estimado. JN é determinado por:
21
1 N ( ) ˆ( ) N
j
J y j y j
N
(3.26)Inicialmente é escolhido um modelo de baixa ordem e posteriormente aumenta-se a ordem do modelo estimado e o AIC é avaliado para cada incremento da ordem do modelo. Assim, a estrutura adequada do modelo estimado é a que proporciona a menor taxa de variação do critério de informação.
A Tabela. (3.2) apresenta os valores numéricos de AIC para os elos X e Z, onde np
representa o número de parâmetros por elo de cada uma das estruturas selecionadas, na
representa o número de pólos, nb representa o número de zeros e k representa o atraso de
Tabela 3.2- Parâmetros do modelo do sistema referentes aos elos X e Z do robô manipulador.
Modelo
a
n nb k AIC (eloX) AIC(eloZ) np
01 1 0 1 -524,64 -700,0 2
02 1 1 1 -535,48 -716,9 3
03 1 1 2 -547,21 -803,4 4
04 2 1 1 -647,15 -786,8 4
05 2 1 2 -650,07 -687,4 4
06 2 2 2 -770,91 -800,2 5
07 3 1 1 -647,73 -800,8 5
08 3 1 2 -655,34 -719,1 5
09 3 2 1 -752,81 -835,4 6
Tomando a Tab.(3.2) como base, tem-se:
M1 é composto pelo os modelos de primeira ordem, ou seja, modelos (01), (02), (03). M2 é composto pelo os modelos de segunda ordem, ou seja, modelos (04), (05), (06). M3 é composto pelo os modelos de terceira ordem, ou seja, modelos (07), (08), (09). Verifica-se na Tab.(3.2) para os conjuntos M1, M2 e M3, separadamente, que com o aumento do número de parâmetros do modelo o valor de AIC diminuiu como era de se esperar. Quando o número de parâmetros for igual nos conjuntos M1, M2, M3, considera-se o menor valor de AIC, tanto para o elo X, quanto para o elo Z.
Figura 3.1-Modelos para o elo X do robô manipulador
Figura 3.2-Modelos para o elo Z do robô manipulador 0 , 0 2 , 0 4 , 0 6 , 0 8 , 0 0 , 1 1
M M2 M3
Ordem a 1 Ordem a 2 Ordem a 3 C rit ér io de I nf or maç ão de Aka ike 0 , 0 2 , 0 4 , 0 6 , 0 8 , 0 0 , 1 1
M M2 M3
As menores taxas de variação do critério de informação que podem ser avaliados para manter a ordem do sistema da planta estimada tão simples quanto possível (princípio da parcimônia) (COELHO E COELHO, 2004), foi para o sistema de segunda ordem.
As Tabelas (3.3) e (3.4) apresentam os valores numéricos para os conjuntos M1, M2, M3 do somatório do erro quadrático (SEQ) dado pela Eq.(3.21) e o coeficiente de correlação múltipla (R²) dado pela Eq. (3.22).
Tabela 3.3. Índice de desempenho do elo X
Modelo
a
n nb k SEQ R2
01 1 0 1 0,778 0,9953
02 1 1 1 0,443 0,9965
03 1 1 2 0,562 0,9964
04 2 1 1 0,219 0,9986
05 2 1 2 0,119 0,9987
06 2 2 2 0,092 0,9993
07 3 1 1 0,203 0,9986
08 3 1 2 0,176 0,9988
09 3 2 1 0,074 0,9995
Tabela 3.4. Índice de desempenho do elo Z
Modelo na nb k SEQ R2
01 1 0 1 0,153 0,9989
02 1 1 1 0,131 0,9984
03 1 1 2 0,050 0,9996
04 2 1 1 0,054 0,9996
05 2 1 2 0,139 0,9990
06 2 2 2 0,070 0,9994
07 3 1 1 0,051 0,9996
08 3 1 2 0,095 0,9930
Conforme os resultados da Tab. (3.3) e da Tab. (3.4) verifica-se que os modelos com três pólos, dois zeros e um atraso de transporte, têm os melhores índices de desempenho, porém, todos os modelos apresentaram um coeficiente de correlação múltipla entre o intervalo de 0,99 a 1, o que credencia quaisquer das configurações acima como aptas para serem utilizadas para o projeto de controle (COELHO E COELHO, 2004). Para realização do experimento foi utilizado um modelo com dois pólos, um zero e um atraso de transporte, baseado no que foi definido anteriormente pelo critério de AIC e pelos resultados da Tab. (3.3) e Tab. (3.4) que o credenciam para utilização no projeto de controle.
Na realização dos experimentos utilizou-se: tempo de amostragem Ts = 200 ms; como excitação para o elo X, a seqüência mostrada na Fig. (3.3) e para o elo Z, a seqüência mostrada na Fig. (3.4); valores iniciais nulos para os parâmetros ai e bj dos dois elos; na
estimação com o MQR fator de esquecimento = 0,97. O sistema funciona da seguinte forma: duas válvulas eletropneumáticas excitam os dois elos do robô, X e Z e suas posições são medidas. De posse desses dados; ux(t), uz(t), x(t), z(t), os estimadores MQR
estimam os parâmetros dos elos X e do elo Z utilizando o modelo ARX, com dois pólos, um atraso e um zero.
0 5 10 15 20 25
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Tempo (s)
E
x
c
it
a
ç
ã
o
n
o
E
lo
X
(
V
Figura 3.3. Excitação no elo X do Robô Manipulador.
0 5 10 15 20 25
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 Tempo (s) E x c it a ç ã o n o E lo Z (V )
Figura 3.4. Excitação no elo Z do Robô Manipulador.
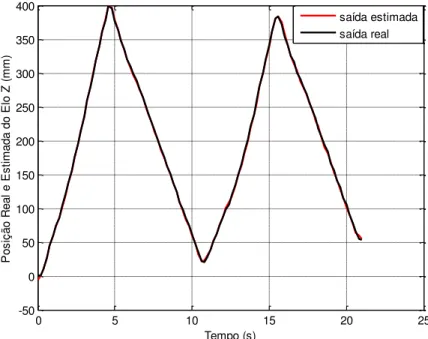
A Figura (3.5) mostra a saída real e estimada com o algoritmo MQR do elo X; e a Fig. (3.6) mostra a saída real e estimada com o mesmo algoritmo, do elo Z.
0 5 10 15 20 25
0 5 10 15 20 25 -50 0 50 100 150 200 250 300 350 400 Tempo (s) P o s iç ã o R e a l e E s ti m a d a d o E lo Z (m m ) saída estimada saída real
Figura 3.6. Saída estimada com o MQR e real, do elo Z do robô manipulador. O erro de previsão, do modelo de segunda ordem escolhido, é apresentado nas Fig. (3.7) e Fig. (3.8).
0 5 10 15 20 25
-80 -60 -40 -20 0 20 40 Tempo(s) E rr o d e E s ti m a ç ã o d o E lo X ( m m )
0 5 10 15 20 25 -140 -120 -100 -80 -60 -40 -20 0 20 Tempo(s) E rr o d e E s ti m a ç ã o d o E lo Z (m m )
Figura 3.8. Erro de previsão para o modelo de segunda ordem do elo Z do robô manipulador.
As Figuras (3.9) e (3.10), mostram a evolução dos parâmetros ai e bj estimados em
tempo real através do programa Identmqr, referentes ao elo X e Z, considerando os
modelos escolhidos.
0 10 20 30 -2 -1.5 -1 -0.5 0 Tempo (s) P a râ m e tr o a 1 x
0 10 20 30 -0.5 0 0.5 1 Tempo (s) P a râ m e tr o a 2 x
0 10 20 30 0 0.1 0.2 0.3 0.4 0.5 Tempo (s) P a râ m e tr o b 1 x
0 10 20 30 -0.05 0 0.05 0.1 0.15 Tempo (s) P a râ m e tr o b 2 x
0 10 20 30 -1.5 -1 -0.5 0 Tempo (s) P a râ m e tr o a 1 z
0 10 20 30
-0.2 0 0.2 0.4 0.6 Tempo (s) P a râ m e tr o a 2 z
0 10 20 30
0 0.2 0.4 0.6 0.8 Tempo (s) P a râ m e tr o b 1 z
0 10 20 30
-0.04 -0.02 0 0.02 0.04 0.06 Tempo (s) P a râ m e tr o b 2 z
Figura 3.10. Parâmetros estimados do elo Z do robô manipulador.
3.4 ESTRUTURA DO MODELO
Definindo a priori a estrutura do modelo do robô manipulador, conforme determinação realizada anteriormente, e os índices x e z para as variáveis u, y e , considerando que cada elo, tem dois pólos, um zero e um atraso de tempo, tem-se da Eq.(3.4):
1 2 1 2
( ) ( 1) ( 2) ( 1) ( 2) ( )
x x x x x x x
y t a x t a x t b u t b u t e t (3.27)
1 2 1 2
( ) ( 1) ( 2) ( 1) ( 2) ( )
z z z z z z z
y t a z t a z t b u t b u t e t (3.28)
Com a solução da Eq. (3.18), obtêm-se os parâmetros
ˆx( )t e
ˆz( )t do robô manipulador, conforme as Eq. (3.29) e Eq. (3.30).
1 2 1 2
ˆ ( )
x t a a b bx x x x
(3.29)
1 2 1 2
ˆ ( )
z t a a b bz z z z
(3.30)
As respostas estimadas y tˆx( ) e y tˆz( ) são obtidas pela Eq. (3.31) e Eq. (3.32).
ˆ ˆ ( ) T( ) ( )
x x x
y t
t
t (3.31)ˆ ˆ ( ) T( ) ( )
z z z
y t
t
t (3.32)3.5CONCLUSÃO
Este capítulo apresentou a identificação de dois elos de um robô manipulador de 3 (GDL) cartesiano, acionado por sistemas eletropneumáticos.
Neste modelamento, o algoritmo MQR é utilizado em tempo real para a identificação dos parâmetros do sistema. O robô manipulador é cartesiano, então os movimentos dos seus elos são desacoplados, logo a identificação é realizada de forma independente para cada elo. O MQR foi implementado por meio do programa Identmqr e o processo
estimativo em tempo real se deu utilizando os dados da Tab.(3.2).
O bom desempenho do MQR na estimação dos parâmetros em tempo real foi constatado a partir das Fig. (3.5) e Fig. (3.6) referentes aos elos X e Z, respectivamente. Para avaliação da qualidade do modelo matemático obtido através do algoritmo foi verificado que o coeficiente de correlação múltilpla ficou muito próximo da unidade e que o somatório do erro quadrático (SEQ) teve valor bem pequeno.
CAPÍTULO 4
PROJETO DO CONTROLADOR DMV PARA OS ELOS X E Z DO
ROBÔ MANIPULADOR DE TRÊS GRAUS DE LIBERDADE (3 GDL)
CARTESIANO
4.1 INTRODUÇÃO
Este capítulo aborda a estratégia de projeto do controlador de Dahlin-Variância Mínima (DMV) utilizado no controle de posição, dos elos X e Z, do Robô Manipulador Eletropneumático de Três Graus de Liberdade cartesiano (3 GDL). A seção 4.2 apresenta alguns trabalhos sobre a estratégia de controle DMV. As seções 4.2.1, 4.2.2 e 4.2.3 apresentam a estratégia de variância mínima, o controle de Dahlin e o controlador DMV, respectivamente. A seção 4.3 apresenta os procedimentos de projeto do controlador DMV para obtenção da lei de controle do manipulador robótico em estudo, assim como as especificações impostas para o projeto do controlador. A seção 4.4 apresenta os resultados experimentais e a seção 4.5 a conclusão.
4.2 HISTÓRICO
DAHLIN (1968) propôs uma estratégia de controle para solucionar sistemas MIMO, denominada Método de Síntese Direta (DMV), a mesma têm como objetivo, fazer com que a dinâmica do sistema em malha fechada comporte-se como um sistema de primeira ordem com atraso de transporte. A desvantagem desta estratégia dá-se a seu fraco desempenho em relação à fase não-mínima, porém tem bom desempenho frente a atrasos de transporte, simplicidade analítica e controle do tempo de convergência para referência através de um único parâmetro de projeto.
controlador robusto, flexível e com desempenho competitivo. Esta combinação garantia erro nulo em regime permanente entre a saída do processo e a referência, mas possuía dificuldade em controlar sistemas de fase não-mínima. Este problema foi solucionado por AL-CHALABI E KHALIL (1994), propondo uma alteração na lei de controle para contornar a limitação.
VAZ E COELHO (1996 a e b) propõem uma modificação ao controlador DMV para garantir erro médio nulo em regime permanente entre a saída original do processo e a referência, quando se atribui uma constante Q ao parâmetro do controlador de AL-CHALABI E KHALIL (1994). Esta nova estrutura é conhecida como controlador de Dahlin-Variância Mínima Modificado (MDMV).
VAZ (1999) propôs uma análise das técnicas de controle para garantir erro médio em regime permanente para os controladores de Variância Mínima Generalizada (GMV) e de Dahlin-Variância Mínima (DMV). Os resultados obtidos confirmam que ambos os controladores apresentam tempo de estabilizações similares, porém o GMV apresentou um índice de desempenho melhor do que o DMV. Como foram poucos os casos estudados não se estabeleceu uma regra entre as duas abordagens. Dentre o DMV com Q incremental, o DMV Modificado (VAZ E COELHO, 1996 a e b) e o DMV de Favier e Hassini (FAVIER e HASSANI, 1982). O DMV com Q incremental apresentou melhor variância do sinal de controle (variância da diferença entre o sinal de controle e sua média), porém pior variância das saídas (variância da diferença entre a saída do processo e a referência). Por outro lado, os resultados obtidos para o DMV não permitiram indicar uma estratégia com melhor desempenho geral.
4.2.1 Controle Auto-Ajustável com base na estratégia de Variância Mínima
Esse tipo de controle tem como objetivo minimizar a variância na saída de um sistema que é submetido a uma perturbação estocástica.
Considerando o sistema descrito pelo modelo ARMAX (Modelo Auto-regressivo com média móvel e entradas exógenas) e com função de transferência discreta linear, conforme Eq. (4.1) (AGUIRRE, 2007; COELHO E COELHO, 2004; WITTENMARK, 1995 e LJUNG, 1999).
1 1 1
( ) ( ) k ( ) ( ) ( ) ( )
A Z y t Z B Z u t C Z e t (4.1)
Onde: u t( )é a variável de controle, y t( )é a saída do sistema e representa um ruído
branco filtrado incidente sobre o sistema. A, B e C na Eq. (4.2) são polinômios característicos do sistema.
1 1
1
( ) 1 na
na
A Z a Z a Z
1 1
0 1 0
( ) nb, 0
nb
B Z b b Z b Z b (4.2)
1 1
1
( ) 1 nc
nc
C Z c Z c Z
A formulação da Lei de controle pode ser expressa em termos de otimização por uma função-custo dada por:
2
[ ( )]
JE y tk (4.3)
Após algumas operações matemáticas e considerando o sistema da Eq. (4.1) no instante t+k, tem-se:
1 1
1 1
( ) ( )
( ) ( ) ( )
( ) ( )
B Z C Z
y t k u t e t k
A Z A Z
Que pode ser re-expressa em função da perturbação como: 1 1 1 1 1 ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
C Z G Z
e t k F Z e t k e t
A Z A Z
(4.5)
Note que a perturbação foi convenientemente dividida em duas seqüencias:
1
( ) ( )
F Z e tk e
1 1 ( ) ( ) ( ) G Z e t A Z
, que representam respectivamente os valores futuros não
disponíveis neste instante e a outra composta por informações até e incluindo o instante t.
Conseqüentemente C
A da Eq. (4.5) pode ser expressa como:
k C G F Z A A (4.6)
A Equação (4.6) é definida como identidade polinomial. (VAZ, 1999), onde:
1 ( 1)
1 1
1 ... k
k
F f Z F Z
0 1 1 ... ng
ng
Gg g Z g Z (4.7)
max ( 1, )
g a c
n n n k
de tal forma que F representa os primeiros k termos da expressão de C A
.
Manipulando adequadamente (4.1), (4.4) e (4.6) tem-se:( ) [ ( ) ( )] ( ) ( 1)[ ( ) ( )]
y tk BFu t Gy t Fe t k C y t k Fe tk (4.8)
Se o controle aplicado é escolhido de forma que
( ) ( ) 0
Então o último termo da Eq. (4.8) desaparece. (ÂSTROM AND WITTENMARK, 1973), dando:
( ) [ ( ) ( )] ( )
y t BFu t k Gy tk Fe t (4.10)
E, a Eq.(4.9) é a lei de controle que minimiza a função custo J. (ÂSTROM AND WITTERMARK, 1973). Logo, da Eq.(4.9), tem-se:
( ) G ( )
u t y t BF
(4.11)
Observa-se que o controlador resultante na Eq.(4.11) incorpora o cancelamento de zeros do sistema em malha aberta, ou seja, o polinômio B deve possuir todos os zeros dentro do círculo unitário (sistema de fase-mínima). Caso contrário, qualquer variação paramétrica conduz em um comportamento instável do sistema em malha fechada, como no caso de sistema de fase não-mínima, mesmo que a estratégia descrita anteriormente o conduza para um desempenho de variância mínima. O que torna a estratégia de variância mínima numa técnica não robusta. Outras suposições para o desenvolvimento do controlador que devem ser respeitadas é o conhecimento do atraso do transporte e a ordem do sistema que deve ser conhecida ou pelo menos limitada.
Dado um sinal de referência ( )y tr , a função de transferência de malha fechada do
sistema de controle é dada por:
( ) k [ ( ) ( )] ( )
r
B G C
y t Z y t y t e t
A BF A
(4.12)
Usando a Eq. (4.6) na Eq. (4.12) e realizando algumas operações matemáticas, tem-se:
( ) k ( ) ( )
r
BF
y t Z y t Fe t C
4.2.2 Controle de Dahlin
O projeto do controlador de DAHLIN (1968) baseia-se no cancelamento da dinâmica do sistema, de modo que em malha fechada o mesmo se comporte como um sistema de primeira ordem com o atraso de transporte.
A saída do sistema utilizando o controlador proposto por Dahlin, que visa reduzir o erro de estado estacionário por um ajuste, é dada por:
r
y(t)=py(t-1)+(1-p)y (t-k'-1) (4.14)
Onde: k'é um inteiro truncado d s T
,
d é o atraso de transporte, Ts é o período deamostragem, peTs, 1
,
é o parâmetro de ajuste de Dahlin e é a constante detempo do sistema. Quando
tende a um valor muito alto, pse aproxima de zero e o controle é mais rápido, e para valores de
pequenos, ptende para a unidade e o controle é mais lento. Por este fato, defini-se o parâmetro pcomo o ajuste de Dahlin, por possuir valores numa faixa limitada. Assim, o parâmetro p pode ser ajustado para obter a velocidade da resposta desejada.O critério de Dahlin para a dinâmica do sistema em malha fechada pode ser expresso pela função de transferência em malha fechada dada pela Eq. (4.15):
1 r
Y (1 )
Y 1
k
p Z pZ
(4.15)
A Eq. (4.15) pode ser equivalentemente convertida em uma estrutura em malha aberta (ZAFIRIOU E MORARI, 1985). O algoritmo de controle equivalente em malha aberta,
0
A equação de síntese para o controlador de Dahlin considerando o algoritmo de controle equivalente em malha aberta é dado por:
0 0 1 r Y D G Y
(4.16)
Usando a Eq. (4.15) na Eq.(4.16), tem-se:
0 1
0
1 (1 ) 1 k p Z D G pZ
(4.17)
Na Equação. (4.17), G0 é a função de transferência do sistema, dada na Eq. (4.13),
desprezando o termo relacionado à perturbação, conforme Eq. (4.18):
0 k BF G Z C (4.18)
4.2.3 Controlador DMV
O controlador DMV combina o controlador de Dahlin com o controlador de variância Mínima, cuja lei de controle é dada por:
( ) ( )
r
CX G
u y t y t
BF CX
(4.19)
Substituindo a Eq.(4.18) na Eq.(4.17), tem-se:
0 CX D BF (4.20) E, 1 (1 ) (1 ) p X pZ
A Figura (4.1) mostra a estrutura do controlador DMV e planta, através do diagrama de blocos.
Figura 4.1- Estrutura do controlador DMV e planta
A desvantagem dessa estrutura é a impossibilidade de controlar sistemas de fase não- mínima. AL-CHALABI e KHALIL (1994) contornaram esta limitação com uma alteração, que consistia em adicionar uma parcela CQ no denominador do bloco direto do controlador. Dessa forma a Eq. (4.20), transforma-se em:
0ff
CX D
BF CQ
(4.22)
E a nova lei de controle alterada para tratar de sistemas de fase não mínima é dada por:
( ) ( )
r
CX G
u y t y t
BF CQ CX
A função de transferência suplementar; Eq. (4.24) foi introduzida na estrutura de controle, como mostra o digrama de blocos da Fig. (4.2).
/
k s
CQ F
G Z
A
(4.24)
Figura 4.2- Estrutura do controlador DMV com alteração e planta.
4.3 PROCEDIMENTOS PARA O PROJETO DO CONTROLADOR DMV COM ALTERAÇÃO
Para obtenção das leis de controle dos elos X e Z do robô manipulador a ser implementada no programa computacional Labview e Matlab foi definida inicialmente a estrutura da planta obtida no Capítulo 3: modelo ARX com dois pólos, um zero e um atraso de transporte, conforme Eq. (4.25).
1 1 1
0 1
1 1 2
1 2
( )
( )
( ) (1 )
k Z b b Z
Y B Z
Z
U A Z a Z a Z
(4.25)
Da Eq. (4.25) tem-se:
1 2
1 2
1 2
1 2
1
b Z b Z
Y
U a Z a Z
(4.26)
Considerando a estrutura do modelo definida para cada elo do robô manipulador, tem-se:
1
( ) 1
C Z (4.27)
0
c
n
1 1 2
1 2
( ) 1
A Z a Z a Z (4.28)
1 1
0 1
( )
B Z b b Z (4.29)
max( 1, 1) max(2 1,0 1) 1
g a c
n n n
1 1 1 0
f
n k
1
( ) 1 o
F Z f (4.30)
1 1
0 1
( )
G Z g g Z (4.31)
Substituindo as Equações (4.27), (4.28), (4.30) e (4.31) em (4.6), tem-se que:
1 2 1 1
1 2 0 0 1
1 (1 a Z a Z )(1 f )Z (g g Z ) (4.32)
Resolvendo a Eq. (4.32) e com algumas operações matemáticas conforme Eq.(4.33) e Eq. (4.34), chega-se ao conjunto de parâmetros dados pela Eq. (4.35) e Eq.(4.36).
1 2 1 2 1 2
1 2 0 1 0 2 0 0 1
1 (1 f0) (a1 a f1 0 g Z0) 1 (a2 a f2 0 g Z1) 2
(4.34)
f0 0
g0 a1 (4.35)
1 2
g a (4.36)
Substituindo (4.35) e (4.36) em (4.30) e (4.31), tem-se:
1
( ) 1
F Z (4.37)
1 1
1
( ) o
G Z g g Z (4.38)
Substituindo as Equações (4.21), (4.27), (4.29), (4.37), (4.38) em (4.19), obtém-se a lei de controle DMV conforme Eq.(4.39).
1 1 0 1 1 0 1 1 1 1 ( ) ( ) ( ) 1 ( ) 1 r p
g g Z pZ
u t y t y t
p b b Z
pZ
(4.39)
Da Eq. (4.39), obtém-se:
1 1
0 1
1 1
0 1
( ) ( )(1 ) ( )
1 ( )
(1 )( ) 1
r
y t g g Z pZ y t
p u t
pZ b b Z p
1 1 0 1 1 1 0 1
(1 ) ( ) ( )(1 ) ( )
1 ( )
(1 )( ) 1
r
p y t g g Z pZ y t
p u t
pZ b b Z p
1 1 1 1
0 1 0 1
( ) (1 )( ) (1 ) ( ) (r )(1 ) ( )
u t pZ b b Z p y t g g Z pZ y t
1 1 2 1 1 2
0 1 0 1 0 0 1 1
( )( ) (1 ) ( ) (r ) ( )
u t b b Z pb Z pb Z p y t g g pZ g Z g pZ y t
0 1 0 1 0 0 1
1
( ) ( ) ( 1) ( 2) (1 ) ( ) ( ) ( ) ( 1)
( 2)
r
u t b b pb u t pb u t p y t g y t g p g y t
g py t
0 1 0 1 0 0 1
1
1
( ) [ ( ) ( 1) ( 2) (1 ) ( ) ( ) ( ) ( 1)
( 2)]
r
u t b pb u t pb u t p y t g y t g p g y t b
g py t