Programa de Pós-Graduação em Engenharia Mecânica
-Mestrado – Doutorado
CONTROLE ADAPTATIVO APLICADO EM UM ROBÔ
MANIPULADOR DE DOIS GRAUS DE LIBERDADE PLANAR
por
James Sidney Freitas de Carvalho
Tese de Doutorado apresentada à Universidade Federal da Paraíba para
obtenção do grau de Doutor em Engenharia Mecânica
JAMES SIDNEY FREITAS DE CARVALHO
CONTROLE ADAPTATIVO APLICADO EM UM ROBÔ
MANIPULADOR DE DOIS GRAUS DE LIBERDADE PLANAR
Tese de Doutorado apresentada ao Programa de Pós-Graduação em Engenharia Mecânica da Universidade Federal da Paraíba - UFPB, em cumprimento às exigências para obtenção de Grau de Doutor em Engenharia Mecânica.
Orientador: Prof. Dr. José Antônio Riul
CONTROLE ADAPTATIVO APLICADO EM UM ROBÔ
MANIPULADOR DE DOIS GRAUS DE LIBERDADE PLANAR
por
James Sidney Freitas de Carvalho
Tese aprovada em 28 de outubro de 2009 Período letivo 2009.2
C331c Carvalho, James Sidney Freitas de.
Controle adaptativo aplicado em um robô manipulador de dois graus de liberdade planar / James Sidney Freitas de Carvalho.- João Pessoa, 2009.
287f. : il.
Orientador: José Antonio Riul Tese (Doutorado) – UFPB/CT
1. Robótica. 2. Identificação de sistemas. 3. Controle adaptativo.
À Cida, minha sempre e amada esposa. Aos meus amados filhos, José Henrique e João Arthur.
Aos meus pais, José Secundo de Carvalho e Maria das Graças F. de Carvalho.
AGRADECIMENTOS
Agradeço principalmente, ao “Grande Arquiteto do Universo”, pois sem a sua permissão nada seria possível.
Agradeço ao meu orientador professor Dr. José Antônio Riul, pelos ensinamentos, paciência, sobretudo, pela confiança em mim depositada.
À Coordenação de Pós-Graduação de Engenharia Mecânica (CPGEM) da Universidade Federal da Paraíba (UFPB) pelo apoio institucional recebido e ao Instituto Federal de Educação, Ciência e Tecnologia de Alagoas (IF-AL) pela oportunidade de realização deste trabalho de tese.
Agradeço à Fundação e Coordenação de Aperfeiçoamento de Pessoal de Nível Superior (CAPES), pelo apoio financeiro.
Agradeço em especial a toda minha família, sobretudo aos meus pais José Secundo e Maria das Graças, e aos meus irmãos pelo estímulo constante.
CONTROLE ADAPTATIVO APLICADO EM UM ROBÔ
MANIPULADOR DE DOIS GRAUS DE LIBERDADE PLANAR
RESUMO
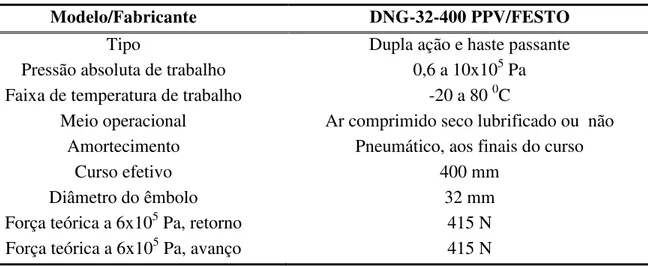
A presente tese tem como objetivo o modelamento e controle em tempo real de um robô manipulador de dois graus de liberdade planar, constituído de um elo rotacional e outro prismático. O elo rotacional é um perfil U em alumínio e tem como atuador um motor-redutor de corrente contínua. O elo prismático é composto por um cilindro pneumático de dupla ação e haste passante, fixado no interior do perfil U e tem como atuador uma válvula eletropneumática proporcional de cinco vias e três posições. O sensoriamento de posição angular do elo rotacional é realizado por meio de um potenciômetro de dez voltas, e o de posição linear do elo prismático é realizado através de uma régua potenciométrica. É obtido o modelo matemático representativo do robô manipulador cujos parâmetros são estimados em tempo real pelo método dos mínimos quadrados recursivo (MQR), em função de entradas impostas ao manipulador e das saídas obtidas considerando o acoplamento entre os elos, a partir de uma estrutura pré-definida para este fim. De posse do modelo do sistema, controladores adaptativos de variância mínima generalizado (GMV) auto-ajustáveis são projetados e implementados visando o controle de posição do robô manipulador, conforme trajetórias especificadas para ambos os elos. Resultados de simulações e experimentais dos modelos estimados e respostas do sistema, considerando seus elos operando de forma desacoplada e acoplada sob a ação dos controladores, são apresentados e comparados.
ADAPTIVE CONTROL APPLIED TO A
TWO-DEGREE-OF-FREEDOM PLANAR MANIPULATOR ROBOT
ABSTRACT
The objective of this thesis was to model and control in real time a planar manipulator robot with two degrees of freedom (2-DOF), comprising a rotational and a prismatic link. The rotational link is an aluminum U-channel activated by a motor-reducer DC. The prismatic link comprises a double-acting pneumatic cylinder and a pass-through rod fixed inside the U-channel and activated by a 5-way electropneumatic proportional valve with three positions. A 10 turn potentiometer senses the angular position of the rotational link, and a potentiometric ruler senses its linear position of the prismatic link. The mathematical model that represents the manipulator robot, whose parameters are estimated in real time by the recursive least squares (RLS) method, is obtained as a function of the inputs fed into the manipulator and its measured outputs, considering the coupling between the links, based on a structure predefined for this purpose. After modeling the system, self-adjustable adaptive controls of generalized minimum variance (GMV) are designed and implemented, which control the position of the manipulator robot according to trajectories specified for the two links. Lastly, the estimated and experimental responses of the system are presented and compared, considering its links operating in uncoupled and coupled mode under the action of the designed controls.
SUMÁRIO
CAPÍTULO 1: INTRODUÇÃO ... 1
1.1 CARACTERÍSTICAS DOS ROBÔS MANIPULADORES ... 1
1.2 JUSTIFICATIVA E RELEVÂNCIA DA PROPOSTA DE TESE ... 3
1.2.1 Aspectos Relacionados com a Dinâmica do Robô Manipulador ... 3
1.2.2 Aspectos Relacionados com o Controle do Manipulador ... 7
1.3 REVISÃO BIBLIOGRÁFICA ... 11
1.4 OBJETIVOS E CONTRIBUIÇÕES DA TESE ... 20
1.5 METODOLOGIA ... 22
1.6 ORGANIZAÇÃO DO TRABALHO ... 23
CAPÍTULO 2: DESCRIÇÃO DO SISTEMA EXPERIMENTAL ... 25
2.1 INTRODUÇÃO ... 25
2.2 PROJETO DO ROBÔ MANIPULADOR DE DOIS GRAUS DE LIBERDADE PLANAR 26 2.3 DESCRIÇÃO DO ROBÔ MANIPULADOR DE DOIS GRAUS DE LIBERDADE PLANAR ... 27
2.3.1 Bancada de Testes ... 28
2.3.2 Sistema de Aquisição de Dados... 29
2.3.3 Componentes do Servoposicionador do Elo de Translação ... 30
2.3.4 Componentes do Servoposicionador do Elo de Rotação ... 33
2.4 CONCLUSÃO ... 36
CAPÍTULO 3: MODELAGEM DO ROBÔ MANIPULADOR DE DOIS GRAUS DE LIBERDADE PLANAR ... 37
3.1 INTRODUÇÃO ... 37
3.2 MODELO MATEMÁTICO DO MANIPULADOR DE DOIS GRAUS DE LIBERDADE PLANAR ... 38
3.3 DEFINIÇÃO DA ESTRUTURA DE MODELO DO MANIPULADOR ... 39
3.3.2 Definição do Tempo de Amostragem ... 41
3.3.3 Definição da Estrutura e Identificação Paramétrica do Manipulador... 45
3.3.4 Identificação em Tempo Real do Manipulador (Resultados Preliminares) ... 64
3.3.5 Validação dos Modelos Estimados para os Elos de Translação e Rotação do Manipulador71 3.4 CONCLUSÕES ... 80
CAPÍTULO 4: CONTROLADORES ADAPTATIVOS ... 82
4.1 INTRODUÇÃO ... 82
4.2 O CONTROLE ADAPTATIVO ... 83
4.2.1 Posicionamento do Elo de Translação em Malha Fechada ... 85
4.2.2 Posicionamento do Elo de Rotação em Malha Fechada ... 87
4.3 TIPOS DE CONTROLADORES ADAPTATIVOS ... 89
4.3.1 Controladores Auto-ajustáveis (STR) ... 89
4.3.2 O Controle Adaptativo de Variância Mínima (MV) ... 94
4.4 PROJETO DO CONTROLADOR GMV-I AUTO-AJUSTÁVEL PARA O ROBÔ MANIPULADOR OPERANDO DESACOPLADO DINAMICAMENTE ... 113
4.4.1 Resultados Obtidos com o Robô Manipulador Operando sob Ação do Controle GMV-I Auto-ajustável Projetado (Elos desacoplados) ... 117
4.5 PROJETO DO CONTROLADOR GMV-I AUTO-AJUSTÁVEL PARA O ROBÔ MANIPULADOR OPERANDO ACOPLADO DINAMICAMENTE ... 137
4.5.1 Resultados Obtidos com o Robô Manipulador Operando sob Ação do Controle GMV-I Auto-ajustável Projetado (Elos Acoplados) ... 140
4.6 CONCLUSÕES ... 160
CAPÍTULO 5: COMPARATIVO DE RESULTADOS ... 164
5.1 INTRODUÇÃO ... 164
5.2 COMPARATIVO DOS RESULTADOS OBTIDOS ... 164
5.3 CONCLUSÕES ... 172
CAPÍTULO 6: CONSIDERAÇÕES FINAIS ... 175
6.1 CONCLUSÕES ... 175
6.2 PROPOSTAS DE CONTINUIDADE DO TRABABLHO ... 178
REFERÊNCIAS BIBLIOGRÁFICAS ... 180
APÊNDICE A: MODELAGEM MATEMÁTICA DE SISTEMAS DINÂMICOS ... 204
A.1 INTRODUÇÃO ... 204
A.3 CLASSIFICAÇÃO DE MODELOS ... 209
A.4 GENERALIDADES SOBRE IDENTIFICAÇÃO DE SISTEMAS DINÂMICOS ... 210
A.4.1 OBJETIVOS DA IDENTIFICAÇÃO ... 210
A.4.2 ETAPAS DA IDENTIFICAÇÃO ... 212
A.4.3 REPRESENTAÇÕES DE MODELOS LINEARES DISCRETOS ... 217
A.4.4 ESTIMADOR DE PARÂMETROS (ALGORITMO DE IDENTIFICAÇÃO) ... 227
A.4.4.1 Obtenção do Estimador dos Mínimos Quadrados ... 230
A.4.4.2 Obtenção do Estimador dos Mínimos Quadrados Recursivo ... 237
A.4.4.3 Estimação de Parâmetros Variantes no Tempo ... 240
A.4.4.4 Obtenção do Estimador MQR Aplicável aos Sistemas Múltivariáveis ... 241
A.4.4.5 Estimação de Parâmetros Variantes no Tempo de Sistemas Múltivariáveis ... 243
A.4.4.6 Critérios para Seleção da Estrutura de Modelos a serem Identificados ... 246
A.4.4.7 Critérios para Validação da Estrutura de Modelos identificados ... 252
A.5 MODELAGEM MATEMÁTICA DO ROBÔ MANIPULADOR DE DOIS GRAUS DE LIBERDADE PLANAR ... 256
APÊNDICE B: CONTROLADORES ADAPTATIVOS ... 262
B.1 INTRODUÇÃO ... 262
B.1.1 CONTROLE ADAPTATIVO POR ESCALONAMENTO DO GANHO (GS) ... 262
LISTA DE FIGURAS
Figura 2.1 - Manipulador Planar... 27
Figura 2.2 – Bancada de Testes ... 28
Figura 2.3 – Diagrama em blocos da bancada de teste ... 29
Figura 2.4 - Servoposicionador do elo translacional ... 30
Figura 2.5– Servoposicionador do elo rotacional ... 34
Figura 3.1 – Excitação aplicada ao servoposicionador pneumático ... 44
Figura 3.2 – Resposta ao degrau do elo de translação em malha aberta ... 44
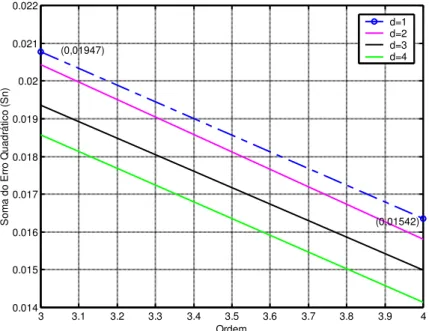
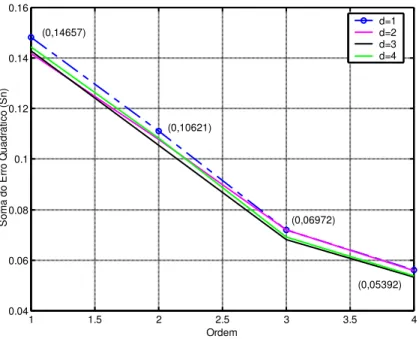
Figura 3.3 – Teste de detecção da ordem do sistema para nb=0 – Elo de Translação. ... 49
Figura 3.4 – Teste de detecção da ordem do sistema para nb=1- Elo de Translação ... 49
Figura 3.5 – Teste de detecção da ordem do sistema para nb=2 – Elo de Translação ... 50
Figura 3.6 – Teste de detecção da ordem do sistema para nb=3 – Elo de Translação. ... 50
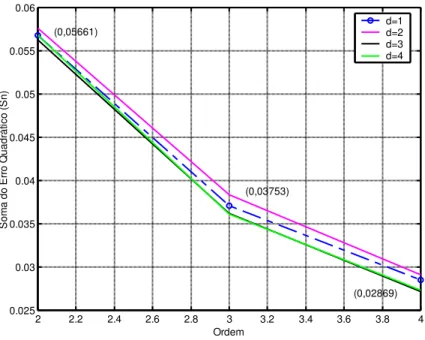
Figura 3.7 – Teste de detecção da ordem do sistema para nb=0 - Elo de Rotação. ... 51
Figura 3.8 – Teste de detecção da ordem do sistema para nb=1- Elo de Rotação. ... 51
Figura 3.9 – Teste de detecção da ordem do sistema para nb=2 – Elo de Rotação. ... 52
Figura 3.10 – Teste de detecção da ordem do sistema para nb=3 - Elo de Rotação. ... 52
Figura 3.11 – Modelos Pré-selecionados - Elo de Translação. ... 57
Figura 3.12 – Modelos Pré-selecionados - Elo de Rotação. ... 57
Figura 3.13 – Modelos selecionados - Elo de Translação. ... 60
Figura 3.14 – Modelos selecionados - Elo de Rotação... 60
Figura 3.15 – Sinal de excitação aplicado ao elo de translação. ... 65
Figura 3.16 – Sinal de excitação aplicado ao elo de rotação. ... 65
Figura 3.17 – Parâmetros ai estimados - Elo de translação. ... 66
Figura 3.18 – Parâmetros bj estimados - Elo de translação. ... 66
Figura 3.19 – Parâmetros ai estimados - Elo de rotação ... 67
Figura 3.20 – Parâmetros bj estimados - Elo de rotação. ... 67
Figura 3.22 – Erro de estimativa referente ao elo de translação... 69
Figura 3.23 – Respostas experimental e estimada referentes ao elo de rotação ... 70
Figura 3.24 – Erro de estimativa referente ao elo de rotação ... 70
Figura 3.25 – Autocorrelação do erro de estimativa e1(k) - Elo de translação ... 72
Figura 3.26 – Autocorrelação do erro de estimativa e2(k) - Elo de rotação ... 72
Figura 3.27 – Correlação cruzada entre a excitação u1(k) e a saída y1(k) - Elo de translação ... 73
Figura 3.28 – Correlação cruzada entre a excitação u2(k) e a saída y2(k) - Elo de rotação ... 73
Figura 3.29 – Correlação cruzada entre o erro de estimativa e1(k) e a excitação u1(k) - Elo de translação ... 75
Figura 3.30 – Correlação cruzada entre o erro de estimativa e2(k) e a excitação u2(k) - Elo de rotação ... 76
Figura 3.31 – Autocorrelação da excitação u1(k) - Elo de translação ... 77
Figura 3.32 – Autocorrelação da excitação u2(k) - Elo de rotação ... 77
Figura 3.33 – Correlação cruzada entre os erros de estimativas e1(k) e e2(k) - Elos de translação e rotação ... 78
Figura 3.34 – Correlação cruzada entre as excitações u1(k) e u2(k) - Elos de translação e rotação ... 79
Figura 4.1 – Diagrama do servoposicionador pneumático ... 87
Figura 4.2 – Diagrama do servoposicionador elétrico ... 88
Figura 4.3 – Diagrama em blocos do controlador STR ... 92
Figura 4.4 – Diagrama em blocos do controlador STR explícito ... 93
Figura 4.5 – Diagrama em blocos do STR implícito ... 94
Figura 4.6 – Controle de variância mínima e sistema com distúrbio ... 95
Figura 4.7 – Estrutura do sistema generalizado para o controlador GMV ... 102
Figura 4.8 – Controle GMV e planta com perturbação ... 106
Figura 4.9 – Respostas experimental e estimada do elo de translação para referências degraus, sob ação do controlador GMV-I auto-ajustável ... 120
Figura 4.10 – Erro de estimativa do elo de translação... 120
Figura 4.11 – Segmento de trajetória referente ao período de 28 a 110 s - Elo de translação .... 122
Figura 4.12 – Autocorrelação do erro de estimativa e1(k) - Elo de translação ... 124
Figura 4.13 – Correlação cruzada entre o erro de estimativa e1(k) e a excitação u1(k) - Elo de translação ... 124
Figura 4.15 – Variável de controle sob ação do controlador GMV-I auto-ajustável - Elo de
translação ... 126
Figura 4.16 – Evolução dos parâmetros ai e bj estimados do elo de translação ... 127
Figura 4.17 – Respostas experimental e estimada do elo de rotação para referências degraus, sob a ação do controlador GMV-I auto-ajustável ... 128
Figura 4.18 – Respostas experimental e experimental filtrada do elo de rotação para referências degraus, sob ação do controlador GMV-I auto-ajustável ... 129
Figura 4.19 – Erro de estimativa do elo de rotação ... 129
Figura 4.20 – Segmento de trajetória referente ao período de 55 a 210 s - Elo de Rotação ... 131
Figura 4.21 – Autocorrelação do erro de estimativa e2(k) - Elo de rotação ... 133
Figura 4.22 – Correlação cruzada entre o erro de estimativa e2(k) e a excitação u2(k) – Elo de rotação ... 133
Figura 4.23 – Erro de saída do elo de rotação ... 134
Figura 4.24 – Variável de controle sob ação do controlador GMV-I auto-ajustável - Elo de rotação ... 135
Figura 4.25 – Evolução dos parâmetros ai e bj estimados do elo de rotação ... 135
Figura 4.26 – Composição de movimentos descritos pelos elos de translação e rotação Considerando-os desacoplados ... 136
Figura 4.27 – Respostas experimental e estimada do elo de translação para referências degraus sob ação do controlador GMV-I auto-ajustável – Sistema acoplado ... 142
Figura 4.28 – Erro de estimativa do elo de translação... 143
Figura 4.29 – Segmento de trajetória referente ao período de 28 a 190 s - Elo de translação .... 145
Figura 4.30 – Autocorrelação do erro de estimativa e1(k) - Elo de translação ... 147
Figura 4.31– Correlação cruzada entre o erro de estimativa e1(k) e a excitação u1(k) - Elo de translação ... 147
Figura 4.32– Erro de saída do elo de translação ... 148
Figura 4.33 – Variável de controle sob ação do controlador GMV-I auto-ajustável ... 149
Figura 4.34– Evolução dos parâmetros ai estimados do elo de translação ... 150
Figura 4.35 – Evolução dos parâmetros bj estimados do elo de translação ... 150
Figura 4.36 – Respostas experimental e estimada do elo de rotação para referências degraus, sob ação do controlador GMV-I auto-ajustável ... 151
Figura 4.37– Erro de estimativa do elo de rotação ... 152
Figura 4.38 – Segmento de trajetória referente ao período de 15 a 75 s - Elo de Rotação ... 153
Figura 4.40 – Correlação cruzada entre o erro de estimativa e2(k) e a excitação u2(k) - Elo de
rotação ... 156
Figura 4.41 – Erro de saída do elo de rotação ... 157
Figura 4.42 – Variável de controle sob ação do controlador GMV-I auto-ajustável ... 157
Figura 4.43– Evolução dos parâmetros ai estimados do elo de rotação ... 158
Figura 4.44– Evolução dos parâmetros bj estimados do elo de rotação ... 159
Figura 4.45 – Composição de movimentos descritos pelos elos de translação e rotação acoplados ... 160
Figura 5.1 – Respostas experimentais do elo de translação para referências degraus, sob ação dos controladores GMV-I auto-ajustáveis ... 166
Figura 5.2 – Erro de seguimento de trajetória do elo rotacional para referências degraus, sob ação dos controladores GMV-I auto-ajustáveis ... 167
Figura 5.3 – Variáveis de controle do elo de translação sob ação dos controladores GMV-I auto-ajustáveis ... 168
Figura 5.4 – Respostas experimentais do elo de rotação para referências degraus, sob ação dos controladores GMV-I auto-ajustáveis ... 169
Figura 5.5 – Erro de seguimento de trajetória do elo de rotação para referências degraus, sob ação dos controladores GMV-I auto-ajustáveis ... 169
Figura 5.6 – Variáveis de controle do elo de rotação sob ação dos controladores GMV-I auto-ajustáveis ... 170
Figura 5.7 – Movimentos relativos descritos pelos elos de translação e rotação ... 171
Figura A.1 – Etapas do Processo de Identificação ... 212
Figura A.2 – Representação de um processo com perturbação estocástica... 218
Figura A.3 – Representação ARX de um Sistema SISO ... 231
Figura A.4 – Teste de detecção da ordem do sistema ... 249
Figura A.5 – Diagrama em bloco do sistema manipulador ... 257
Figura B.1 – Sistema de Controle Adaptativo por Escalonamento de Ganhos - GS ... 263
Figura B.2 – Controle adaptativo por modelo de referência – MRAC... 265
Figura B.3 – Controle adaptativo por modelo de referência - MRAC indireto ... 266
LISTA DE TABELAS
Tabela 2.1 – Dados técnicos da válvula eletropneumática proporcional ... 31
Tabela 2.2 – Dados técnicos do cilindro pneumático ... 31
Tabela 2.3 – Tensão de excitação versus tensão de saída do amplificador de potência ... 34
Tabela 3.1 – Características das excitações dos elos do manipulador... 41
Tabela 3.2 – Parâmetros de inicialização do IdentMANIPMQR ... 47
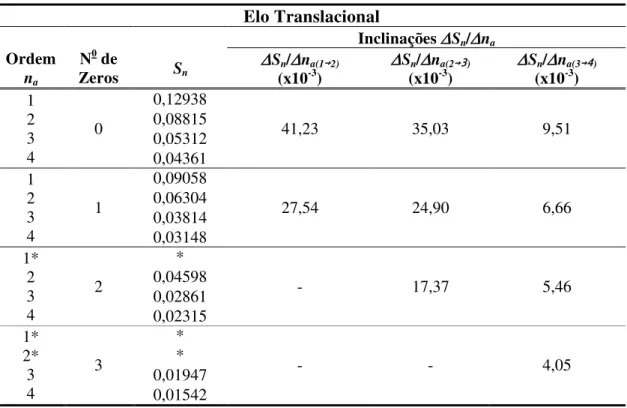
Tabela 3.3 – Inclinações Sn/na referentes ao elo Translacional ... 53
Tabela 3.4 – Inclinações Sn/na referentes ao elo Rotacional ... 54
Tabela 3.5 – Parâmetros dos modelos do Sistema de translação ... 58
Tabela 3.6 – Parâmetros dos modelos do Sistema de rotação ... 58
Tabela 3.7 – Parâmetros R2, Sn, AIC e taxa de variação do AIC - Sistema de Translação ... 61
Tabela 3.8 – Parâmetros R2, Sn, AIC e taxa de variação do AIC - Sistema de Rotação ... 61
Tabela 3.9 – Médias e variâncias referentes aos erros de estimativa ... 71
Tabela 3.10 – Médias e variância das funções de autocorrelação e correlação cruzada ... 79
Tabela 4.1 – Critérios de desempenho para avaliação dos sistemas de controle ... 118
Tabela 4.2 – Parâmetros de inicialização do IdentMANIPMQRGMV1... 119
Tabela 4.3 – Desempenho do elo de translação relativo aos critérios de desempenho estabelecidos - Elo de translação/Sistema desacoplado ... 122
Tabela 4.4 – Desempenho do elo de translação relativo aos índices de desempenho IAE, VAR, s e Id,estabelecidos - Elo de translação/Sistema desacoplado ... 123
Tabela 4.5– Desempenho do elo de rotação relativo aos critérios de desempenho estabelecidos - Elo de rotação/Sistema desacoplado ... 131
Tabela 4.6– Desempenho do elo de rotação relativo aos índices de desempenho IAE, VAR, s, e Id estabelecidos - Elo de rotação/Sistema desacoplado ... 132
Tabela 4.7– Trajetórias especificadas para os elos de rotação e translação ... 136
Tabela 4.8– Parâmetros de inicialização do IdentMANIPMQRGMV2 ... 141
Tabela 4.10 – Desempenho do elo de translação relativo aos índices de desempenho IAE, VAR,
s e Id - Elo de translação/Sistema acoplado ... 146
Tabela 4.11 – Desempenho do elo de rotação relativo aos critérios de desempenho estabelecidos - Elo de rotação/Sistema acoplado ... 154 Tabela 4.12 – Desempenho do elo de rotação relativo aos índices de desempenho IAE, VAR, s,
e Id - Elo de rotação/Sistema acoplado ... 154
LISTA DE SÍMBOLOS E ABREVIATURAS
A( z -1), B( z -1), C( z -1), D( z -1) e F( z -1) – Polinômio discretos de parâmetros A( −1), B( −1) – Matrizes polinomiais discretas de parâmetros
an, bn, cn, dn, fn– Parâmetros dos polinômios discretos
( −1) e ( −1) - Elementos das matrizes polinomiais discretas A( −1) e B( −1)
e - Parâmetros referentes ao modelo SISO do sistema
AIC – Critério de informação de Akaike
- Valor normalizado do critério de Akaike ARX – Modelo auto-regressivo com entradas externas
ARMAX - Modelo auto-regressivo com média móvel e entradas exógenas
d– Atraso de transporte associado ao sistema - Função impulso unitário (Delta de Dirac)
Sn– Variação da soma dos quadrados do erro de estimativa
n– Variação da ordem do sistema
e(k) – Erro de estimativa, predição ou previsão, atribuído à modelagem, erro de medição, ruído estocástico acrescentado à saída y(k), com média nula e variância 2
ε(k) – Erro residual
erroi(j) – Erro de segmento de trajetória por um i-ésimo elo do sistema em um instante j
de tempo
- erro médio de segmento de trajetória por um i-ésimo elo do sistema (k), E(k), EM(k) – Vetor de erros de estimativa referente ao sistema MIMO
∙ - Esperança Matemática
FIR – Modelo de resposta ao impulso finito
(k) - Vetor de medidas de entradas e saídas referente ao sistema SISO m - Vetor de medidas de entradas e saídas referentes ao sistema MIMO
∅ ,∅ - Funções de autocorrelação de ε(k) e no atraso
∅ ,∅ - Funções de correlação cruzada de u(k) e no atraso
GMV – Controlador de variância mínima generalizado GS – Controlador de ganhos tabelados
IAE - Erro Integral Absoluto (IAE) Id - Índice de desempenho
, , 2, - Função custo k– Instante de tempo discreto
- Ganho do estimador �, � - Fator de esquecimento
MQ – Algoritmo dos mínimos quadrados
MQR – Algoritmo dos mínimos quadrados recursivos MQE - Algoritmo dos mínimos quadrados estendidos MQG - Algoritmo dos mínimos quadrados generalizados MVS – Algoritmo de máxima verossimilhança
MVI – Método de variáveis instrumentais
MRAC – Controlador adaptativo por modelo de referência MV – Controlador adaptativo de variância mínima
MIMO – Sistema com múltiplas entradas e múltiplas saídas
MP– Máximo sobre-sinal (%)
N– Número de medidas ou amostras
na, nb, nc, nd e nf– Ordem dos polinômios discretos
n, np– Número de parâmetros estimados do modelo
OE – Modelo de erro na saída
PI – Controlador proporcional integral PD – Controlador proporcional derivativo
- Matriz de covariância
−1 , −1 e −1 - Polinômios de ponderação do controlador GMV p– Número de saídas referente ao sistema MIMO
r– Número de entradas referente ao sistema MIMO ou fator de ponderação de u(k)
R2, 2( ) - Coeficiente de correlação múltipla
STR – Controlador auto-ajustável
SISO – Sistema com única entrada e única saída
Sn, SEQM – Soma do erro quadrático de estimativa
2 - Variância
�2 - Variância do erro de estimativa Ta– Tempo de amostragem (s)
ts– Tempo de acomodação (s)
95% - Tempo para que a resposta do sistema atinja 95% do seu valor final
- Constante de tempo (s)
Θ - Vetor de parâmetros referente ao sistema SISO Θ - Matriz de parâmetros referente ao sistema MIMO Θ , Θ – Vetores de parâmetros estimados
u(k) – Entrada do sistema no instante k ou variável de controle
UM (k) – Vetor de entradas referente ao sistema MIMO
VAR - Variância do erro de acompanhamento de referência
v(k) - Ruído branco filtrado a partir de e(k) e estatisticamente independente - Referência
y(k) – Saída do sistema no instante k
- Média das N medidas para a saída ( ) do sistema sob ensaio
( ) - Saída estimada do modelo do sistema no instante k referente ao sistema SISO
k−1,� - Saída atual estimada do sistema, baseada em valores de saída passados
YM (k) – Vetor de saídas referente ao sistema MIMO
CAPÍTULO 1:
INTRODUÇÃO
1.1CARACTERÍSTICAS DOS ROBÔS MANIPULADORES
Ao longo das últimas décadas a abertura de mercado e o processo de globalização da economia têm levado o setor industrial a um novo padrão de concorrência, onde as formas tradicionais de gestão e produção não são mais suficientes para garantir a lucratividade e sobrevivência no mercado que se apresenta cada vez mais competitivo e exigente em qualidade, custo e atendimento. Visando o aumento de produtividade e padronização na qualidade de produtos, muitas indústrias têm implementado a automatização de sua produção baseada na utilização de robôs manipuladores para realização de tarefas pré-determinadas e repetitivas. Neste panorama, os robôs manipuladores estão sendo cada vez mais utilizados em atividades que envolvem precisão e alta velocidade (UNECE, 2004)1.
Atualmente, os robôs industriais substituem o homem na realização de diversos tipos de operações. Eles podem servir como máquinas–ferramenta para realizar tarefas como soldagem, prensagem, forjamento, embalagem, entre outras e, são empregados nos mais diversificados segmentos industriais como mecânica, automobilística, aeronáutica, espacial, eletroeletrônica e outros. O setor produtivo automobilístico tem se beneficiado muito ao se utilizar deste tipo de equipamento, onde a maior parte das tarefas de montagem, soldagem, pintura e polimento é realizada pelos robôs manipuladores.
No final da década de 50, o primeiro robô industrial foi desenvolvido, o “Unimate”, por George Devol e Joe Engeberger (ROMANO, 2002), e, desde esta época vem se desenvolvendo de acordo com os avanços tecnológicos ocorridos em função dos inúmeros resultados de pesquisas realizadas, o que justifica a constante realização de estudos voltados para esta área.
Os robôs manipuladores, objeto desta pesquisa, são basicamente dispositivos de posicionamento com muitos graus de liberdade, formados por cadeias de corpos (elos), em cuja extremidade é fixada uma ferramenta ou dispositivo com o qual é realizada a tarefa, conhecido como efetuador (end-effector). Os elos que formam a cadeia são interligados através de juntas às quais determinam o grau de liberdade do mecanismo e podem ter movimentos de translação (prismático) ou de rotação (rotacional).
O movimento do efetuador de um manipulador é o resultado do movimento das juntas, realizado pelos atuadores podendo estes serem do tipo elétrico, eletrohidráulico ou eletropneumático, com a predominância dos atuadores elétricos (RAMIREZ et al., 2003). Quando os atuadores são elétricos além do motor costuma ser necessária uma transmissão através da qual a velocidade do motor é adequada às necessidades do manipulador. Como o movimento do efetuador é monitorado nas juntas, é comum que os elos e as transmissões mecânicas dos seus atuadores sejam construídos de forma a serem bastante rígidos para que os erros de flexibilidade introduzidos por estes elementos sejam minimizados (RAMIREZ et al., 2003).
Os sensores, que medem o estado do manipulador e se necessário o estado do ambiente, normalmente são encoders, potenciômetros, tacômetros, câmeras e sensores de torque/força, entre outros.
O robô manipulador, como uma planta a ser controlada, é um sistema mecatrônico múltivariável, não-linear e com acoplamentos dinâmicos e por isso, seus parâmetros são incertos e variam ao longo do tempo, onde a tarefa de controle é por si mesma uma tarefa dinâmica (CANUDAS et al., 1996).
regime, que podem ser significativos, dependendo do robô manipulador e do grau de incertezas nos efeitos de gravidade (SCIAVICCO e SICILIANO, 1996; MARTINS, 2001).
Considerando as características e fenômenos relacionados com a dinâmica dos manipuladores, verifica-se que o controle dos mesmos não é uma tarefa trivial e o principal desafio está na complexidade da dinâmica e nas incertezas paramétricas e dinâmicas que lhes são peculiares. Por isso, a busca de soluções no sentido de minimizar o efeito destas não linearidades visando o controle do movimento preciso de robôs manipuladores tem-se tornado um problema de interesse crescente.
Nesta tese, é aplicada a técnica de controle adaptativo para o controle de trajetória de um robô manipulador de dois graus de liberdade planar. Uma rotina computacional implementada estima os parâmetros do sistema em tempo real, empregando o método dos mínimos quadrados recursivo (MQR) e em seguida calcula os parâmetros do controlador que se encarregará do controle do robô manipulador. Resultados experimentais são apresentados e discutidos.
1.2JUSTIFICATIVA E RELEVÂNCIA DA PROPOSTA DE TESE
Nesta seção serão apresentados os aspectos que estão relacionados com a dinâmica e controle do manipulador planar em estudo, objetivando ressaltar para o leitor a relevância, o que motivou e, sobretudo, a justificativa da realização desta pesquisa.
1.2.1Aspectos Relacionados com a Dinâmica do Robô Manipulador
maior dificuldade de realização do controle contínuo destes servoatuadores está relacionada com as não-linearidades inerentes a estes sistemas, principalmente devida à compressibilidade do ar (PERONDI e GUENTHER, 2002). Este comportamento não-linear tem limitado a utilização destes servoatuadores em tarefas que se exija um seguimento preciso de trajetória de maneira que o movimento se dê de forma suave e contínua. Neste sentido, os avanços dos sistemas computacionais ocorridos nos últimos anos aliado ao rápido desenvolvimento de controladores eletrônicos, baseados em processadores de sinais digitais e o desenvolvimento de novos instrumentos eletrônicos como sensores digitais, além de componentes pneumáticos tais como as servoválvulas de alta precisão e novas configurações de cilindros, tem motivado diversos trabalhos que investigam os sistemas pneumáticos de controle ou servoatuadores pneumáticos.
Em atendimento à necessidade de realização de novas pesquisas que envolva o controle de servoatuadores em acompanhamento de trajetórias, sobretudo os pneumáticos, surgiu a idéia de construção de um protótipo de robô manipulador de dois graus de liberdade planar, no Laboratório de Automação e Controle do Departamento de Engenharia Mecânica da Universidade Federal da Paraíba.
No protótipo construído, com o objetivo de estudar o controle de trajetória sobre dois servoatuadores distintos, foi empregado no acionamento do elo de rotação um motor-redutor no qual se utilizou como máquina motriz um motor de corrente contínua de imã permanente controlado pela armadura. No acionamento do elo de translação, foi utilizada uma válvula eletropneumática.
CANUDAS et al. (1987) realizaram um estudo para compensar adaptativamente o efeito não-linear do atrito em um motor de corrente contínua e concluíram que quando o efeito do atrito é compensado, o modelo do motor pode ser descrito por um modelo linear com coeficientes constantes. As características do atrito dependem da direção do movimento do motor e por fim, o atrito é sempre presente de alguma forma, causa dificuldades e provoca um mau desempenho em aplicações servo para o controle de robôs e outras.
custo/benefício de 10:1, aproximadamente (RICHARDSON et al., 2001), segurança quanto a sobrecargas, pode operar em altas velocidades, facilidade para instalação e manutenção, utilizam como energia o ar comprimido que é uma energia limpa e não oferece riscos de incêndio, apresentam boa relação de força de saída por unidade de peso. Porém, a compressibilidade do ar e as não-linearidades associadas ao escoamento do ar na servoválvula e ao atrito entre o êmbolo e a camisa do cilindro em conjunção com os atrasos devido à baixa velocidade de propagação das ondas de pressão no ar, tornam difícil a obtenção de posicionamentos precisos quando utiliza-se os servoposicionadores pneumáticos para execução de diversas tarefas. Normalmente, estes sistemas quando operam sob condições de baixa pressão de trabalho apresentam uma certa “mobilidade” devido a compressibilidade do ar.
A força de atrito é considerada a mais complexa das não-linearidades presentes nos servomecanismos pneumáticos e depende da temperatura, direção do movimento, pressões nas duas câmaras, velocidade e fatores como condições de lubrificação. O material, o tipo e a geometria das vedações também exercem grande influência no comportamento da força de atrito presentes nos cilindros pneumáticos (VIRVALO e KOSKINEN, 1988; SANTOS, 1996; RICHARDSON et al., 2001; GUENTHER e PERONDI, 2004 ).
Os efeitos do atrito no controle de posição são os mais variados possíveis e podem ocasionar erros de regime e de seguimento de trajetória. A literatura apresenta vários efeitos de degradação do desempenho do movimento causados pelas características não-lineares do atrito (CANUDAS et al., 1995; PERONDI e GUENTHER, 2002). Alguns destes efeitos são chamados de adere-desliza (stick-slip), hunting, perda de movimento (standstill) e quadrature glitch. O efeito stick-slip refere-se a uma alternância entre o movimento de deslizamento e o repouso, sendo definido como um ciclo limite estável surgido durante o movimento e é mais perceptível quando é utilizado o controle do tipo integrativo, devido à tendência da correção do erro que é uma característica inerente a este tipo de controle. Da mesma forma que o efeito
sistema é mantido no repouso por um intervalo de tempo ao passar pela velocidade nula. Finalmente, o termo quadrature glitch refere-se ao erro de seguimento de trajetória num movimento que envolve múltiplos eixos (movimento de uma mesa de coordenadas, por exemplo).
Em servoatuadores, outra fonte de atrito situa-se no sensor de posição e nos locais em que sua parte móvel entra em contato com as guias direcionais fixas.
O atrito representa uma forte não-linearidade em que conhecer o seu modelo matemático exato não é uma tarefa fácil devido ao fato de ser variante ao longo do tempo de acordo com as condições operacionais, de projeto e do meio, caracterizando-se como uma incerteza paramétrica.
A não-linearidade de zona-morta da válvula ocorre quando a largura do carretel é maior que diâmetro do orifício no pórtico da válvula por onde escoa o ar. Em válvulas proporcionais, seria ideal que a área de passagem do ar fosse proporcional ao sinal de controle da válvula a fim de facilitar o controle das vazões que são direcionadas às câmeras dos cilindros, porém isto não acontece devido à presença da zona-morta.
A não-linearidade de zona-morta causa limitações no desempenho da malha de controle por realimentação e por isso precisa ser compensada. Os efeitos da zona-morta podem ser minimizados adaptativamente (TAO e KOKOTOVICK, 1996; VALDIERO, 2005; MENDOZA, 2006).
Outra consideração a ser feita com relação ao servoposicionador pneumático, é que as características do atrito de seus componentes variam com o tempo, ou seja, o atrito estático por exemplo, varia com a posição e o desgaste das peças internas do cilindro e válvula, enquanto que o atrito viscoso pode mudar com alterações da temperatura. Sendo assim, seus efeitos sobre o sistema variam com o tempo (SANTOS, 1996; VALDIERO, 2005; GUENTHER et al., 2006).
condições devem ser levadas em consideração na estratégia de controle a ser adotada. A trajetória desejada é definida pela posição desejada do elemento efetuador de tarefas, que se pressupõe estar montado em um dos extremos da haste do cilindro.
Resumindo, o protótipo em estudo é um sistema MIMO2, altamente não-linear, acoplado e com parâmetros variáveis com o tempo, por isso seu controle é extremamente complexo pois além das não-linearidades e incertezas paramétricas envolvidas, têm-se ainda a possibilidade de ocorrer interações entre as variáveis de entrada e saída, ou melhor, entre as malhas de controle (XIONG e CAI, 2006). Por isso trata-se de um problema de controle cuja solução não é considerada trivial.
1.2.2Aspectos Relacionados com o Controle do Manipulador
Atualmente muitas estratégias de controle têm sido empregadas na tentativa de solucionar os problemas de controle de movimento de robôs manipuladores. A literatura tem apresentado as mais variadas técnicas (AGUIRRE, et al., 2007). Dentre elas tem-se o controle Integral-Derivativo (PID), Derivativo (PD), Proporcional-Proporcional-Integrativo (P-PI), Lead-Lag, feedfoward e PD+feedfoward, as técnicas de controle avançado como Adaptativo e Robusto e finalmente, as técnicas tais como Redes Neurais Artificiais e Lógica Fuzzy (CARELLI et al., 1995; CHEN et al., 1997; BOBROW e MCDONELL, 1998; KIM e LEWIS, 2000; WANG et al., 2001; PAZOS e HSU, 2003; LABIOD et al., 2005; BURKAN & UZMAY, 2005; OUYANG et al., 2006; PURWAR et al., 2007 ). As técnicas convencionais de controle têm sido empregadas na maioria dos processos automatizados no segmento industrial nos últimos 50 anos. Segundo ÄSTROM & HÄGLUND (2001), o controle PID ainda hoje predomina em aplicações. Estima-se que mais de 90% das malhas existentes são do tipo PI/PID atingindo uma larga faixa de aplicações, o que é justificado pela sua simplicidade e robustez. Algumas destas aplicações compreendem o controle de processos, a indústria automobilística, indústria eletroeletrônica, controladores de vôo, pilotos automáticos, entre outros.
2 MIMO (Multiple Input, Multiple Output): Sistema multivariável composto de múltiplas entradas e
Apesar desta importância, os controladores PID apresentam desempenho inadequado em algumas aplicações, sobretudo, em processos não-lineares e com parâmetros variantes com o tempo (incertezas paramétricas), por serem controladores de ganho fixo. Na literatura há relatos de que uma porcentagem significante dos controladores instalados operam em modo manual e que mais de 50% dos controladores PID‟s instalados que operam em modo automático não apresentam um desempenho satisfatório frente a sistemas complexos (OVIEDO et al,, 2006; ARRUDA et al., 2008; TEIXEIRA et al., 1998).
As técnicas convencionais de controle de robôs manipuladores ou aquelas baseadas em modelo (controle de posição e/ou força) envolvem o conhecimento das equações que descrevem o comportamento dinâmico do manipulador, ou seja, o conhecimento das formulações de Newton-Euler, Lagrange-Euler ou das equações generalizadas de D‟ Alambert (CRAIG, 1986). O problema de controle começa a existir pelo fato de que estas formulações requerem o completo conhecimento do modelo dinâmico do robô e este por sua vez é muito complexo. Além de ser necessária a inclusão da dinâmica de seus elementos (dos elos), também devem ser inclusos a dinâmica do sistema de transmissão, dos atuadores e equipamentos eletrônicos de comando. Estes elementos incorporam ao modelo novas inércias e atritos, aumentando ainda mais sua complexidade. Assim, as equações obtidas são acopladas e contemplam incertezas paramétricas.
Por outro lado, as soluções destas equações exigem a realização de uma elevada quantidade de cálculos, tornando necessário o uso de máquinas de grande porte, tendo em vista o esforço computacional requerido (KOIVO e GUO, 1983; CARVALHO et al., 2008).
Normalmente, com o objetivo de reduzir o esforço computacional e obter uma solução factível para este problema, recorre-se às técnicas de linearização do modelo dinâmico em torno de um ponto de operação do sistema. A aplicação desta técnica parte da suposição de que o sistema a ser controlado pode ser representado convenientemente por um modelo dinâmico linear e invariante no tempo de ordem reduzida, que despreza a dinâmica da planta em freqüências elevadas. FRANKLIN et al. (1994), afirmam que o controlador que é obtido com a utilização dessa técnica de projeto, também é linear e invariante no tempo.
nos parâmetros e, as não-linearidades existentes sejam “fracas” a ponto de poderem ser desconsideradas. Porém, a grande maioria das plantas sofre variações em seus parâmetros ao longo do tempo ou apresentam diversas formas de não-linearidades, tornando necessário um processo periódico de ajuste nos parâmetros dos controladores quando estes são fixos, procedimento por vezes dispendioso, demorado e muitas vezes não sendo possível de ser realizado (nos casos em que não há a possibilidade da planta ter sua operação descontinuada).
A utilização de controle robusto pode ser uma alternativa para solucionar os problemas da variação paramétrica de um sistema. Porém, deve-se ter alguns cuidados na sua utilização, como a existência de um compromisso entre robustez (seja com relação a rejeição de distúrbios ou a erros de modelagem) e desempenho do controlador, pois, não é possível obter um controlador que garanta um bom desempenho na região de freqüências em que o modelo de projeto é grosseiro (CRUZ, 1996).
Outra proposta para contornar este problema é a utilização de técnicas de controle adaptativo, onde é suposto que os parâmetros e/ou estrutura de modelo da planta podem variar ao longo do tempo, permitindo assim, que o controlador possa compensar essas alterações atualizando seus parâmetros, de modo a manter o sistema com desempenho desejado (ÅSTRÖM e WITTENMARK, 1984). Esta técnica permite que os parâmetros de um modelo selecionado para representar o sistema sejam identificados e a partir dos valores obtidos, os parâmetros do controlador e a variável de controle necessária ao controle do sistema são calculados em tempo real.
SEBORG (1994) classificou as estratégias de controle em cinco categorias, levando em consideração a sua utilização no setor industrial. Dentre as categorias classificadas, a técnica de controle adaptativo se enquadrou na categoria III, classificada como uma técnica de controle avançada e largamente utilizada na indústria e isso reforça mais ainda a motivação em utilizá-la na solução do problema de controle do manipulador em estudo.
No trabalho de MONTENEGRO (2007), são apresentados resultados do uso da técnica de controle adaptativo para o controle de temperatura de ar em um túnel psicrométrico, sistema SISO3, cujo modelo foi obtido por meio de técnicas de identificação paramétrica em tempo real através do algoritmo dos mínimos quadrados recursivos. Realizou-se um estudo
minucioso de várias configurações de controladores adaptativos e com base nas quais, foram projetados e implementados os controladores proporcional integral (PI) de ganho tabelado, PI auto-ajustável via alocação de pólos, variância mínima (MV) auto-ajustável e o controlador preditivo generalizado (GPC) auto-ajustável. O desempenho do sistema sob a ação de cada um dos controladores citados foi avaliado quando submetidos ao seguimento de uma trajetória (seqüência de degraus de temperatura), no intervalo de tempo de 700 segundos e, os resultados experimentais obtidos possibilitaram concluir que os controladores adaptativos projetados foram capazes de rastrear a referência e que o controlador GPC auto-ajustável apresentou o melhor desempenho dentre os controladores avaliados.
Há a necessidade da realização de maiores investigações no que diz respeito à aplicabilidade desta técnica em sistemas múltivariáveis a exemplo o robô manipulador planar em estudo, que apresenta um maior grau de complexidade devido às interações entre malhas, às adversas não-linearidades e incertezas paramétricas a ele associadas.
Na literatura encontram-se diversos estudos e métodos aplicados ao controle de trajetória de robôs manipuladores (MACHADO et al., 1993; CACCAVALE e SICILIANO, 1999; MATTIAZZO et al., 2002; CHOI, et al., 2005; TAYEBI e ISLAM, 2006). Nos trabalhos encontrados o manipulador tem sido modelado geralmente, por meio das metodologias convencionais tais como a cinemática e a dinâmica, e os modelos gerados não contemplam a presença das não-linearidades devido à atritos, zona- morta, acoplamentos dinâmicos existentes e incertezas paramétricas como às existentes no manipulador em estudo.
O tratamento do problema de controle em manipuladores robóticos empregando as metodologias cinemática e dinâmica, respectivamente, apesar de ter seus aspectos positivos, poderá levar o sistema de controle a operar com limitações e cometer erros devidos às limitações computacionais e efeitos mecânicos desprezados no ato da modelagem (LAMAS, et al., 2002).
ligada à identificação, compensação das não-linearidades e incertezas paramétricas neste tipo de servoatuador, pouco tem sido pesquisado.
Por outro lado, a tecnologia de controle adaptativo representa uma metodologia sistemática e flexível que é adequada ao tratamento de incertezas tais como paramétricas e não-linearidades. Conseqüentemente, o controle adaptativo apresenta um imenso potencial no que diz respeito ao controle de sistemas complexos, pouco compreendidos e/ou que mude de características de maneira não previsível.
Outro fator importante que motivou a realização deste trabalho é que embora a literatura de controle de processos seja rica e bem diversificada na descrição de técnicas e procedimentos de projeto, poucos trabalhos práticos têm apresentado propostas para o controle digital em tempo real aplicáveis aos manipuladores robóticos. Um grande número de algoritmos de controle tem se baseado apenas em ambientes de simulação digital. Há portanto a necessidade de se investigar em termos práticos o quão eficientes e úteis são estes algoritmos para o controle de sistemas dinâmicos com as características e complexidades expostas.
1.3REVISÃO BIBLIOGRÁFICA
O controle de robôs manipuladores não é novidade e tem sido um tema bastante pesquisado nos últimos anos, devendo-se este interesse às aplicações industriais e, sobretudo, às aeroespaciais. Na literatura encontram-se estudos correlatos ao controle dos manipuladores robóticos anteriores à década de 1980.
Há basicamente duas linhas gerais de estudo relacionadas com o tema “Controle de robôs manipuladores”. Uma enfoca a identificação e a outra, o controle destes sistemas.
Devido às suas propriedades e características, as técnicas de controle adaptativo normalmente apresentam-se como uma boa opção para o controle de sistemas que apresentam não-linearidades e incertezas paramétricas como é o caso dos robôs manipuladores.
Apresenta-se a seguir uma revisão bibliográfica nestas linhas de estudo, delineando-se o estado da arte.
DUBOWSKY e DESFORGES em 1979. Estes pesquisadores implementaram uma técnica de parametrização otimizada a qual foi aplicada em um sistema robótico de seis graus de liberdade. Nesta formulação, cada servomecanismo foi modelado como um sistema de segunda ordem, sendo o acoplamento dinâmico entre os elos desprezados e, para cada elo, ganhos de posição e de velocidade são calculados por um algoritmo que minimiza uma função de erro positiva semi-definida utilizando o Steepest Decent Method. A estabilidade foi analisada considerando o modelo desacoplado linearizado. Portanto, este trabalho representa a primeira implementação de controle adaptativo aplicada aos sistemas robóticos (TOSUNOGLU e TESAR, 1988).
Tratando-se da servopneumática, as obras geralmente reconhecidas como primeira apresentação significativa são os trabalhos de autoria de JL SHEARER em 1956 (SHEARER, 1956a e 1956b).
BURROWS e WEBB (1968) publicaram um trabalho promissor relacionado com o controle adaptativo de servomecanismos pneumáticos (SUÁREZ e LUIS, 2005; QUILES et al
2004).
LIU (1985) desenvolveu um esquema de controle adaptativo para manipuladores robóticos, empregando em sua estrutura o estimador dos mínimos quadrados generalizados e a técnica de controle auto-ajustável via alocação de pólos. As equações que descrevem a dinâmica de cada junta foram escritas em forma de equações a diferenças considerando-as desacopladas e o controle do sistema se dá em cada junta isoladamente. Baseado nesta técnica, os pólos do sistema em malha fechada são alocados de forma a satisfazer as condições transitórias pré-estabelecidas para que se tenha um preciso acompanhamento de trajetória. Os autores realizaram um estudo de caso como aplicação, por meio de simulações numéricas, demonstrando a eficiência desta técnica.
adaptativo de torque computado foi proposto. SLOTINI e LI (1987) apresentaram resultados semelhantes aos obtidos por CRIAG utilizando as medidas de posição e velocidade.
GUO e ANGELES (1989) apresentaram em seu artigo um método de controle adaptativo aplicável aos manipuladores robóticos múltiarticulados. Esta técnica requer que as equações dinâmicas não-lineares e acopladas do manipulador sejam linearizadas sobre uma trajetória pré-escrita. Baseado no modelo linearizado e sob o pressuposto de pequenos desvios dos valores nominais das variáveis de posição, velocidade e aceleração, os controladores são projetados e o estimador dos mínimos quadrados recursivo (MQR) é utilizado para estimar on-line a matriz de ganhos dos controladores, sendo estes ganhos atualizados e ajustados a cada período de amostragem para obter-se o controle desejado do sistema. Assim, em vez de se estimar os parâmetros inerciais do robô manipulador, os ganhos dos controladores, variantes com o tempo, são estimados. Dessa forma, o algoritmo de controle resultante é muito mais simples e os cálculos exigidos são reduzidos. Resultados de simulações realizadas em um robô manipulador apresentaram erros de posicionamento na faixa de 5 a 10%.
Em 1990, YUH e TISSUE propuseram uma técnica de controle adaptativo em tempo discreto sendo o modelo do manipulador obtido a partir da linearização das equações multivariáveis do sistema, escritas na forma de equações a diferenças, sendo os parâmetros estimados por algoritmos de identificação paramétricos. Os ganhos de controle são obtidos on-line através da técnica de alocação de pólos, a partir dos parâmetros estimados do modelo. Resultados de simulações realizadas em um manipulador com dois graus de liberdade mostraram a eficiência do método apresentado.
implementada considerando-se uma frequência de amostragem de 30 Hz, sendo obtido um
preciso acompanhamento de trajetória por parte do robô manipulador.
PU et al. (1991) realizaram um estudo sobre motores acionados por meio do ar comprimido e utilizados como atuadores. Este estudo mostra que em termos de desenvolvimento de um modelo matemático, os motores a ar apresentam uma vantagem sobre os cilindros pneumáticos pois o volume de ar a ser controlado é relativamente constante, eliminando uma grande não-linearidade do atuador.
CANUDAS et al. (1991) discutem sobre o uso do controle adaptativo para a compensação do atrito em robôs manipuladores. Neste estudo, os autores sugerem um modelo aproximado para o atrito que é geralmente válido para uma faixa de velocidades consideradas. Para controladores adaptativos operando a baixas velocidades, tal modelo proporciona resultados superiores aos dos controladores que se utiliza do modelo de atrito de Coulomb.
Em 1992, JOHNSON e LORENZ apresentam resultados experimentais sobre a identificação e compensação de atrito de mecanismos submetido ao controle de posição. Neste trabalho, os autores mapeiam o atrito como uma função da velocidade e realizam uma análise de regressão para identificar os coeficientes de atrito estático, de Coulomb e viscoso, respectivamente.
WHITCOMB et al. (1993) apresentam uma metodologia de controle adaptativo baseada em modelo e prova a estabilidade assintótica global do método ao ser aplicado a dois robôs do tipo ARMS (GMFanuc, Modelo A-500 e o Yale Bügler). A partir de dados experimentais, os autores mostram a superioridade do método com relação ao acompanhamento de trajetórias sobre o controle convencional PD, além de comparar e demonstrar a superior performance desta metodologia sobre outras técnicas semelhantes (baseadas em modelo) e não adaptativas.
TSENG e SHIH (1995) apresentaram em seu artigo o modelamento de um sistema composto por dois cilindros pneumáticos, comandados através de válvulas eletropneumáticas proporcionais, visando o controle de posição de suas hastes. O modelo matemático do sistema é obtido em tempo real por meio de técnica de identificação paramétrica sendo utilizado o algoritmo dos mínimos quadrados recursivo e dados de entrada e saída coletados do sistema. A partir do modelo obtido, um controlador PID foi projetado empregando-se a técnica de controle ótimo segundo o critério de otimização ITAE. Devido às incertezas e não-linearidades apresentadas, os autores do artigo recomendam que a identificação e o controle do sistema ocorram em tempo real, para que sejam obtidos resultados mais exatos.
ZIAUDDIN e ZALZALA (1995) discutiram a degradação do desempenho dos manipuladores equipados com os controladores PID, principalmente na ocorrência de grandes variações de tarefas ou de carga em seu efetuador. Discorrerem também sobre as dificuldades de se conhecer exatamente os parâmetros do modelo ao se utilizar as técnicas adaptativas de controle nestas situações, devido ao acoplamento dinâmico e não-linearidades inerentes aos manipuladores, o que normalmente exigem algoritmos computacionalmente complexos. Para solução deste problema, sugerem a abordagem de processamento paralelo a qual foi implementada para o controle de um manipulador com seis graus de liberdade.
REMY e WECK (1995) apresentam um sistema de controle adaptativo projetado por meio de técnicas baseadas na lógica Fuzzy e Rdes Neurais Artificiais, aplicado para o controle de velocidade de um servomotor de corrente contínua. Os autores fazem um comparativo entre as abordagens fuzzy e neural e discutem algumas de suas características no que concerne à identificação e controle de sistemas. O sistema de controle projetado consiste de uma rede neural que modela o servomotor e calcula o erro necessário para modificar os parâmetros do sistema de controle e de um controlador neuro-fuzzy treinado on-line a partir do erro calculado através do modelo neuronal, que se encarregará de manter o servomotor operando dentro dos limites especificados para a velocidade. O uso de uma rede neural para modelar o sistema se deu devido às não-linearidades apresentadas por este servomecanismo.
incertos e, o controlador projetado segundo esta técnica, apresenta insensibilidade a variações paramétricas e a perturbações, utilizando apenas medições de entrada (tensão aplicada à armadura) e saída do sistema controlado (velocidade no eixo do motor). Nesta metodologia de projeto, os autores utilizam duas estratégias distintas: O controle adaptativo por modelo de referência (MRAC) e o controle a estrutura variável (VSC). O MRAC é projetado para atender as especificações de desempenho definidas pelo modelo de referência. É constituído de uma estrutura de controle parametrizada e de um mecanismo de aprendizagem ou adaptação que utiliza somente medições de entrada e saída do sistema. Já no caso do VSC, as variáveis de estado definem uma trajetória que deve alcançar e manter-se sobre uma superfície, chamada de Superfície Deslizante (UTIKIN, 1992). Resultados de simulações comprovam a robustez e insensibilidade às variações paramétricas do servomecanismo controlado.
POULIN et al. (1996) descrevem em seu artigo o uso de um controlador PID auto-ajustável aplicável a um sistema SISO. O controlador apresentado pode controlar processos estáveis ou instáveis, com zeros estáveis e instáveis, com um integrador, processos instáveis e, processos aperiódicos padrões. Utiliza-se da técnica de identificação paramétrica recursiva explícita e, os parâmetros são estimados considerando uma estrutura de modelo de segunda ordem com um atraso de transporte. O controlador aplica a técnica de cancelamento de zeros e pólos e é sintonizado tomando-se por base o critério de otimização ITAE. A performance do controlador apresentado é avaliada comparando-o com controladores comerciais do tipo PID convencionais.
CHEN et al. (1997) exploram em seu artigo um controlador H adaptativo. No
projeto do referido controlador é introduzido um modelo para sinais de distúrbio para melhorar a capacidade de rejeição de distúrbios quando do acompanhamento de trajetória. Para isso, o projeto do controlador H adaptativo compõe-se de um algoritmo adaptativo para
TEIXEIRA et al. (1998) apresentam o projeto de um controlador neural adaptativo capaz de controlar o posicionamento de um manipulador Puma 560 considerando seus três primeiros graus de liberdade. Utilizou-se a técnica de Torque Computado para o projeto do sistema de controle do manipulador o qual foi implementado via redes neurais artificiais. Tal controlador necessita de uma fase off-line para treinamento prévio da rede e uma fase on-line
para que a rede já treinada se adapte a possíveis alterações no modelo ou distúrbio de carga. O treinamento da fase on-line é feito a partir de uma variação do algoritmo Back-propagation já conhecido na literatura. Na implementação do controlador neural tipo torque computado é utilizada uma rede contendo três camadas, com a função de representar a dinâmica inversa do manipulador. Para tal, a rede é treinada a partir de pares de entrada e saída de dados gerados a partir do modelo dinâmico inverso do manipulador. A estratégia proposta para o controle do manipulador Puma 560 aplicando a técnica descrita possibilitou a obtenção de bons resultados e apropriada para controlar tais plantas.
LIN e MON (2002) propuseram um controlador hibrido Fuzzy-Adaptativo (HAFC), o qual é aplicado para o controle de posição de sistemas robóticos. O sistema não-linear é controlado por um controlador em espaço de estados e um controlador Fuzzy-Adaptativo, para isso, uma lei adaptativa foi desenvolvida para sintonizar os ganhos de um controlador robusto de modo deslizante, o Sliding Modes Controller (SMC), como também, lidar com as incertezas e erros do modelo. O método de controle proposto é aplicado para avaliar a posição e promover o acompanhamento de trajetória de um robô de dois graus de liberdade. Um comparativo feito entre a técnica proposta e as metodologias PD convencional, adaptativo e SMC demonstram que a técnica proposta, promove a melhoria da performance do sistema quanto ao acompanhamento de trajetória, além de exibir estabilidade e robustez.
não-lineares de modo que o sistema equivalente visto pelo MRAC é reduzido a um sistema sem erros de modelagem significantes. Os autores apresentam uma análise de estabilidade e mostram a capacidade de rastreamento do método proposto. A metodologia apresentada foi aplicada para o controle em tempo real de uma plataforma giroscópica objetivando ressaltar seu uso prático.
MONTENEGRO et al. (2004) apresentaram resultados obtidos por meio de um controlador adaptativo projetado segundo a técnica de alocação de pólos, com o fim específico de controlar a posição da haste do cilindro de um sistema eletropneumático. O uso desta metodologia é justificado pelas limitações apresentadas pelas técnicas convencionais de controle diante das incertezas paramétricas, dinâmicas não modeladas e não-linearidades apresentadas por estes sistemas.
RIUL et al. (2004) propuseram em seu artigo o uso do controle adaptativo descentralizados, visando controlar a posição de uma mesa de coordenadas de dois graus de liberdade, composta de duas bases e acionadas por motores de corrente contínua. A técnica de projeto utilizada foi a de alocação de pólos, sendo considerado que as mesas operam desacopladas dinamicamente. A partir da estrutura de modelo pré-definida para as mesas, seus parâmetros são estimados em tempo real a cada período de amostragem por meio do algoritmo dos mínimos quadrados recursivo, os quais são utilizados no projeto de controladores PI adaptativos via alocação de pólos. Os resultados experimentais obtidos confirmam a eficiência da metodologia apresentada.
BURKAN e UZMAY (2005) descrevem em seu artigo o uso de um controlador adaptativo, aplicado ao controle de manipuladores robóticos, cuja lei de controle é definida para os n-elos do manipulador e baseai-se na teoria de estabilidade de Lyapunov. A lei de adaptação de parâmetros, é obtida considerando as aproximações de SLOTINE (1987) e SCIAVICCO e SICILIANO (1996).
um distúrbio caracterizado como um ruído branco, sendo o critério considerado no projeto, a minimização de uma variável de controle auxiliar baseada no conceito de controle de modos deslizantes. O algoritmo de controle auto-ajustável combina um estimador recursivo com o controlador GMV para o caso onde modelos auto regressivos são utilizados. A convergência das variáveis auxiliares é comprovada pela teoria de Lyapunov. Esta metodologia foi validada por meio de simulações computacionais e, baseados nos resultados obtidos os autores concluíram que: para assegurar a estabilidade do sistema, os parâmetros estimados não precisam necessariamente convergir para seus valores verdadeiros; esta metodologia de controle é extensiva aos sistemas MIMO e pode ser formulada de forma similar.
Além dos trabalhos apresentados anteriormente, inúmeras outras pesquisas têm fornecido subsídios para a compreensão dos fenômenos não-lineares que envolvem os dispositivos de acionamentos dos manipuladores robóticos tais como os servomecanismos eletropneumáticos. Os resultados destas pesquisas têm contribuído positivamente no desenvolvimento de técnicas de modelagem e controle adequados para estes atuadores. Dentre estes trabalhos pode-se citar CANUDAS et al. (1995), NOURI et al. (2000), ZORLU et al.
(2003), GUENTHER et al. (2006). Nestes artigos, os autores normalmente analisam as características não-lineares do atrito e emprega-as nos projetos de controladores destinados ao controle de servoposicionadores pneumáticos.
Resultados de estudos envolvendo o escoamento de fluido compressível são encontrados RICHARD e SCAVARDA (1996) e CRUZ et al. (2004).
Tratando-se da fundamentação teórica relacionada com os temas identificação, controle adaptativo e sistemas robóticos, a literatura conta com uma bibliografia muito vasta. Dentre as encontradas cita-se: ÅSTRÖM e WITTENMARK (1995), AGUIRRE (2000), AGUIRRE et al. (2007), ROMANO (2002), BEHAR e IRANZO (2003), BOBÁL et al.
1.4 OBJETIVOS E CONTRIBUIÇÕES DA TESE
O objetivo desta tese é desenvolver projetos de controladores empregando técnicas de controle adaptativo, visando o controle de posição em tempo real de um robô manipulador de dois graus de liberdade planar.
O trabalho será conduzido teórica e experimentalmente, sendo objetivos específicos os seguintes:
Desenvolver, instalar, realizar testes e ajustar o sistema no qual será realizado este trabalho;
Realizar revisão bibliográfica sobre o tema em estudo;
Estudar métodos numéricos e algoritmos aplicáveis à identificação paramétrica de sistemas dinâmicos;
Aplicar os conhecimentos teóricos adquiridos na etapa anterior para modelar/identificar parametricamente o manipulador robótico em estudo; Estudar controladores adaptativos existentes, bem como, métodos numéricos
empregados no projeto de tais controladores;
Projetar e implementar controladores adaptativos de Variância Mínima Generalizados (GMV) auto ajustáveis e, avaliar o comportamento do sistema sob a ação de tais controladores ao descrever uma seqüência de degraus como referência, considerando as seguintes situações:
i. O manipulador operando com seus elos desacoplados e,
ii. O manipulador operando com seus elos acoplados dinamicamente; Realizar análise comparativa e discutir os resultados obtidos através das duas
configurações utilizadas (desacoplada e acoplada); Apresentar as conclusões do trabalho proposto.