Uma arquitetura de controle inteligente para múltiplos robôs
Texto
Imagem
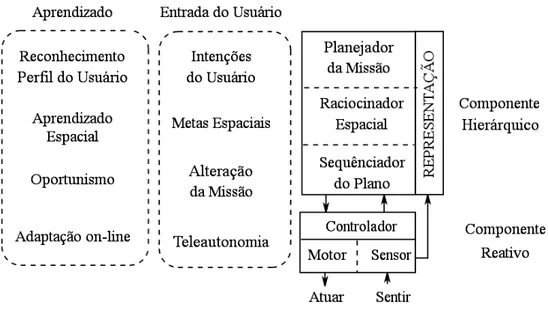
![Figura 2.1: Representa¸c˜ao simb´olica dos sistemas de controle de robˆos [Arkin, 1999].](https://thumb-eu.123doks.com/thumbv2/123dok_br/18504204.370809/30.892.103.783.506.773/figura-representa-simb-olica-sistemas-controle-robˆos-arkin.webp)






Documentos relacionados
Avaliação clínica e laboratorial de cães domésticos em Itaipuaçu – Maricá, estado do Rio de Janeiro, área de ocorrência de casos de leishmaniose visceral
Contrariamente ao IIRA, tal como nos referimos anteriormente, o novo instrumento é baseado no método «MinMax» 1 , obedece a uma lógica de comparação entre os
•• Alimentação racional e desvios ali Alimentação racional e desvios alimentares mentares •• Actividade física e repouso Actividade física e repouso.. ••
¼ Se o brilho da lâmpada indicadora estiver definido para DESLIGADO, após a unidade ser ligada, o brilho das lâmpadas indicadoras estará FRACO durante cerca de 10 segundos e
a) Ficha de inscrição, em modelo próprio, disponibilizado no site da Universidade, preenchido com a disciplina escolhida conforme elencada no Anexo I (a partir
Neste texto, Tatossian já demonstrava o domínio que tinha sobre os conceitos e sinalizava para alguns aspectos da fenomenologia que norteiam sua obra e anunciam de alguma forma
Por outro lado, os sistemas inteligentes, por intermédio de técnicas baseadas principalmente em redes neurais artificiais e sistemas de inferência fuzzy, têm mostrado
Em São Jerônimo da Serra foram identificadas rochas pertencentes à Formação Rio do Rasto (Grupo Passa Dois) e as formações Pirambóia, Botucatu e Serra Geral (Grupo São
