Sensor Inteligente para Medição de Cargas Mecânicas
Texto
Imagem
![Figura 2-12. Placa analógica de condicionamento de sinal [21].](https://thumb-eu.123doks.com/thumbv2/123dok_br/16812955.750987/33.892.203.695.824.1067/figura-placa-analógica-de-condicionamento-de-sinal.webp)
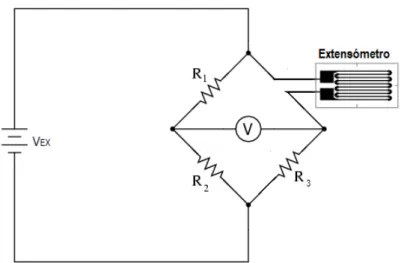
![Figura 2-12. Esquema do circuito analógico de condicionamento de sinal [21].](https://thumb-eu.123doks.com/thumbv2/123dok_br/16812955.750987/34.892.129.775.371.684/figura-esquema-do-circuito-analógico-de-condicionamento-sinal.webp)

Documentos relacionados
An optimized set of loading (tension), frequency and number of cycles was obtained. Concerning the method validation, using modified T-test samples in fresh and humidity-aging
Nas comparações entre os trabalhos estudados, percebe-se uma modificação no perfil nordeste, e, o centro do arco praial da praia de Camboinhas apresentou nos últimos
1.1 A presente seleção de Tutor a Distância será regida por este Edital e será executada pelo DEaD/IFMA Campus São Luís Monte Castelo e Comissão de
O objetivo do curso foi oportunizar aos participantes, um contato direto com as plantas nativas do Cerrado para identificação de espécies com potencial
A assistência da equipe de enfermagem para a pessoa portadora de Diabetes Mellitus deve ser desenvolvida para um processo de educação em saúde que contribua para que a
Treze Centros de Distribuição, incluindo um exclusivo para o segmento hospitalar e de vacinas, servindo 91% do mercado consumidor de produtos farmacêuticos no Brasil em dezembro
F REQUÊNCIAS PRÓPRIAS E MODOS DE VIBRAÇÃO ( MÉTODO ANALÍTICO ) ... O RIENTAÇÃO PELAS EQUAÇÕES DE PROPAGAÇÃO DE VIBRAÇÕES ... P REVISÃO DOS VALORES MÁXIMOS DE PPV ...
Mineração de conhecimento interativa em níveis diferentes de abstração: Como é difícil prever o que exatamente pode ser descoberto de um banco
