UNIVERSIDADE FEDERAL DO CEARÁ CENTRO DE TECNOLOGIA
DEPARTAMENTO DE ENGENHARIA HIDRÁULICA E AMBIENTAL DOUTORADO EM ENGENHARIA CIVIL
ÁREA DE CONCENTRAÇÃO: RECURSOS HÍDRICOS
VALDER ADRIANO GOMES DE MATOS ROCHA
AVALIAÇÃO DE CALIBRAÇÃO DE REDES HIDRÁULICAS USANDO O MÉTODO ITERATIVO DO GRADIENTE HIDRÁULICO ALTERNATIVO (MIGHA) APLICADO
A ESCOAMENTO TRANSIENTE
VALDER ADRIANO GOMES DE MATOS ROCHA
AVALIAÇÃO DE CALIBRAÇÃO DE REDES HIDRÁULICAS USANDO O MÉTODO ITERATIVO DO GRADIENTE HIDRÁULICO ALTERNATIVO (MIGHA) APLICADO
A ESCOAMENTO TRANSIENTE
Tese apresentada ao Curso de Doutorado em Recursos Hídricos da Universidade Federal do Ceará como requisito parcial para a obtenção de grau de Doutor.
Orientador: Prof. Dr. John Kenedy Araújo
VALDER ADRIANO GOMES DE MATOS ROCHA
AVALIAÇÃO DE CALIBRAÇÃO DE REDES HIDRÁULICAS USANDO O MÉTODO ITERATIVO DO GRADIENTE HIDRÁULICO ALTERNATIVO (MIGHA) APLICADO
A ESCOAMENTO TRANSIENTE
Tese submetida à Pós-Graduação em Engenharia Civil, do departamento de Engenharia Hidráulica e Ambiental da Universidade Federal do Ceará, como parte dos requisitos necessários à obtenção do título de Doutor em Engenharia Civil – Área de Concentração em Recursos Hídricos.
Aprovada em: _____ / _____ / _______ .
Banca Examinadora:
________________________________________ Prof. Dr. John Kenedy de Araújo (orientador)
Universidade Federal do Ceará (UFC)
________________________________________ Prof. Marco Aurélio Holanda de Castro, PhD
Universidade Federal do Ceará (UFC)
_____________________________________ Prof. Dr. Francisco de Assis Souza Filho
Universidade Federal do Ceará (UFC)
________________________________________ Prof. Dr. Luis Henrique Magalhães Costa Universidade Estadual Vale do Acaraú (UVA)
_____________________________________ Prof. Dr. Mariano da Franca Alencar Neto
AGRADECIMENTOS
A Deus pelas constantes provas de amor que tem me dado e pela permissão para que este dia chegasse.
Ao amigo Magno, pela brilhante e extraordinária contribuição na programação desta pesquisa, colocando-se sempre à disposição, em prejuízo, muitas vezes, de seu próprio trabalho e de sua própria família.
Ao amigo Luis Henrique, pelo apoio moral, pela amizade e pela enorme contribuição.
Ao amigo Fernando Peroba, pela incondicional vontade e determinação e estimular-me e motivar-me na realização deste trabalho, pela amizade verdadeira e incondicional que nos leva a um sentimento de irmandade, mesmo com ausência de consanguinidade.
À minha noiva, Sibelle Rezende, e meu filho Marcelo pelo amor, compreensão e paciência por minha constante ausência no período desta pesquisa.
Aos meus pais, Valder Rocha e Ana Altina, e meus irmãos, Heleno, Ana Karine, Alessandro, Christiano e Ana Aline, pelo amor incondicional, força e o incentivo em todos os momentos de minha vida.
Aos amigos e colegas professores da UFERSA, que, na posição de coordenador do curso de Engenharia Civil, de engenharia Mecânica ou de Chefe do Deparatamento, me ajudaram permitindo horários flexíveis de trabalho em virtude do doutorado. São Eles: prof. Edson fraga, prof. Francisco Júnior, prof. Raimundo Amorim e prof. Rodrigo Nogueira de Codes.
Ao professor John Kenedy Araújo pela orientação sem a qual este trabalho não teria sido desenvolvido e, sobretudo, pela paciência, amizade, companheirismo e torcida que teve por mim não só neste projeto, mas em todos os projetos e momentos da minha vida durante o período de doutorado.
Aos professores do doutorado e do mestrado em Recursos Hídricos e Saneamento Ambiental pelos conhecimentos repassados durante o curso.
Aos professores Assis, Iran, Ticiana e Mariano pela colaboração e contribuição neste trabalho.
Ao AMIGO, colega de doutorado e de trabalho na UFERSA, Marcos Vinícius, pela torcida, amizade, companheirismo e apoio na realização deste trabalho.
Ao AMIGO Danilo, também colega de doutorado, pelo companheirismo e apoio durante todo o doutorado.
RESUMO
Quando se pretende simular o comportamento de uma rede hidráulica, é necessário conhecer todos os parâmetros físicos desta rede. Com o tempo, alguns desses parâmetros vão se alterando naturalmente devido ao desgaste e ao próprio uso, isso ocorre, por exemplo, com as rugosidades das tubulações. A estimativa desses parâmetros não se dá por métodos diretos, necessita-se conhecer algumas respostas hidráulicas, como vazão e pressão, para que se possa estimar esses parâmetros através de métodos inversos. O processo de busca ocorre através da comparação entre medidas de pressão observadas em campo e medidas de pressão obtidas por esses métodos. A busca pelo melhor conjunto resposta que represente esses parâmetros desconhecidos recebe o nome de calibração.
Desenvolve-se um método para estimar a rugosidade das tubulações de uma rede hidráulica a partir de dados observados de cargas hidráulicas transientes durante um evento transitório. O Método Iterativo do Gradiente Hidráulico Alternativo (MIGHA) é utilizado como método inverso neste trabalho. O transiente é provocado por manobras em uma válvula de controle. Ensaios são realizados em diferentes cenários e sob diferentes condições e os resultados mostram um método simples, com resultados satisfatórios.
ABSTRACT
The real behavior of a Water distribution System depends on precise knowledge of physical parameters such as diameter, roughness, flow consumption (demands), etc. These parameters commonly change with time. For instance, one of the main parameters, the real roughness, tend to increase with time due to degradation of the specific pipe material. One can not precisely determine the real roughness of a pipe by using direct measurement methods. In order to achieve the objective of estimating roughness with some precision, two parameters of the water distribution network should be measured in the field, these parameters are pipe flow and pressure. Once known these parameters for a reasonable amount of points, equally distributed along the network of pipes, the real roughness may be determined by inverse methods. This process is called calibration.
This study proposes a methodology to determine pipe roughness using transient pressure data which occurs during the Water Hammer Analysis phenomena. The Iterative Hydraulic Gradient Method is used as the inverse method in this study. The transient pressure data is produced by changes in the flow caused by opening and closing of Control Valves. According to results presented in this study the new methodology proposed appears to be simple and which produces reliable results.
LISTA DE FIGURAS
FIGURA 2.1 – Linhas Características... 14
FIGURA 2.2 - (a) Linha Característica Negativa e (b) Linha característica Positiva. . 18
FIGURA 4.1 – Zoneamento da área com as respectivas condutividades hidráulicas (K). ... 38
FIGURA 4.2 - Zoneamento da área com as respectivas condutividades hidráulicas (K) obtidas pelo MIGHA depois do processo de calibração. ... 38
FIGURA 4.3 – Fluxograma do procedimento alternativo aplicado aos parâmetros hidrodinâmicos. SCHUSTER (2004). ... 41
FIGURA 4.4 – Fluxograma do MIGHA na calibração de coeficientes de rugosidade. ROCHA (2008). ... 45
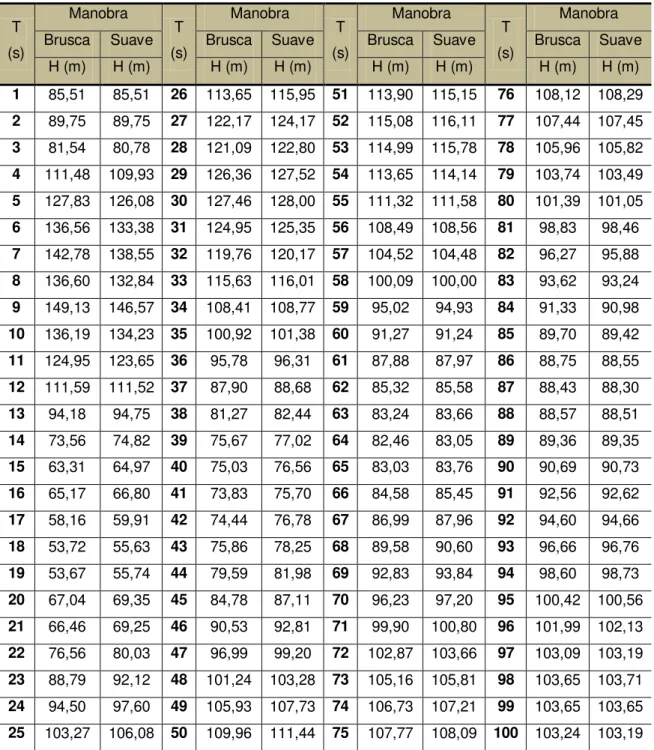
FIGURA 5.1 – Manobra lenta de fechamento e abertura da válvula. ... 53
FIGURA 5.2 - Manobra brusca de fechamento e abertura da válvula. ... 53
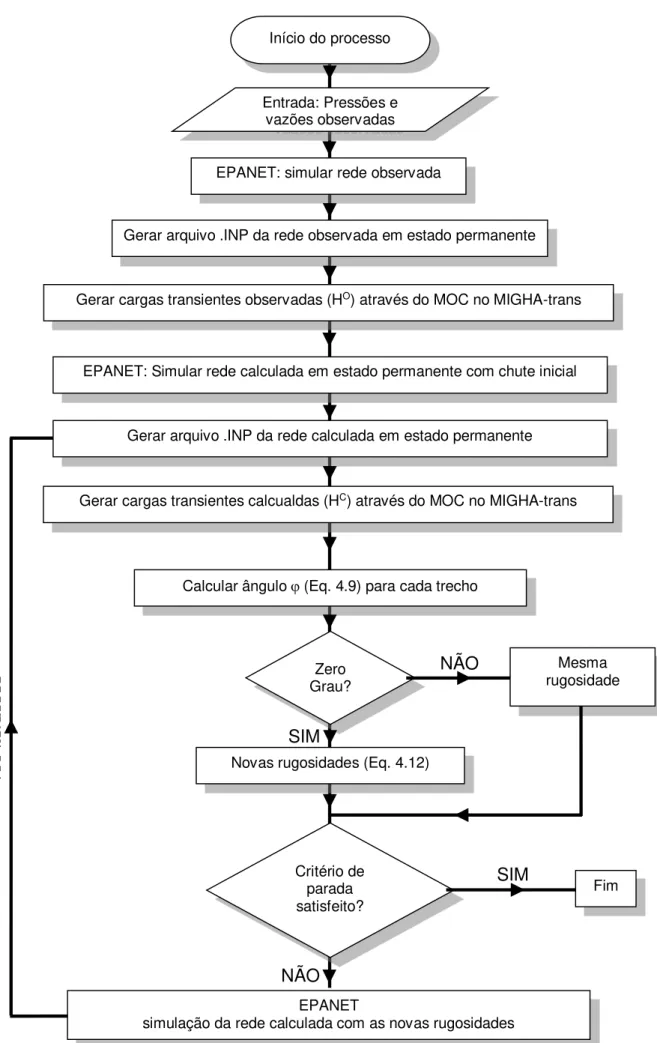
FIGURA 6.1 - Fluxograma do MIGHA-trans na calibração de rugosidades. ... 59
FIGURA 6.2 – Rede Exemplo. ... 60
FIGURA 6.3 - Carga hidráulica transiente “observada” no nó 5, para as duas situações de rugosidades reais iguais e diferentes simulados no cenário 1. ... 68
FIGURA 6.4 - Carga hidráulica transiente “observada” no nó 5, para as duas situações de rugosidades reais iguais e diferentes simulados no cenário 2. ... 68
FIGURA 6.5 - Carga hidráulica transiente “observada” no nó 10, para as duas situações de rugosidades reais iguais e diferentes simulados no cenário 1. ... 73
FIGURA 6.6 - Carga hidráulica transiente “observada” no nó 10, para as duas situações de rugosidades reais iguais e diferentes simulados no cenário 2. ... 73
FIGURA 6.7 - Gráfico dos Erros Médios relativos, EMR’s, das rugosidades agrupados por hipótese para os dois tipos de manobras. ... 78
FIGURA 6.8 - Gráfico dos Erros Médios relativos, EMR’s, das rugosidades agrupados pelos tipos de manobras para as diferentes hipóteses de grau de conhecimento das rugosidades. ... 78
FIGURA 6.9 - Gráfico das diferenças absolutas entre pressões reais e simuladas pelo MIGHA-TRANS obtidas através da manobra brusca com as médias das rugosidades calibradas referentes às duas hipóteses de rugosidades reais iguais, para o cenário 1. ... 80
FIGURA 6.10 - Gráfico das diferenças absolutas entre pressões reais e simuladas pelo MIGHA-TRANS obtidas através da manobra brusca com as médias das rugosidades calibradas referentes às duas hipóteses de rugosidades reais iguais, para o cenário 2. ... 81
FIGURA 6.11 - Gráfico das diferenças absolutas entre pressões reais e simuladas pelo MIGHA-TRANS obtidas através da manobra suave com as médias das rugosidades calibradas referentes às duas hipóteses de rugosidades reais iguais, para o cenário 1. ... 83
FIGURA 6.12 - Gráfico das diferenças absolutas entre pressões reais e simuladas pelo MIGHA-TRANS obtidas através da manobra suave com as médias das rugosidades calibradas referentes às duas hipóteses de rugosidades reais iguais, para o cenário 2. ... 84
FIGURA 6.14 - Gráfico das diferenças absolutas entre pressões reais e simuladas pelo MIGHA-TRANS obtidas através da manobra brusca com as médias das rugosidades calibradas referentes às duas hipóteses de rugosidades reais
diferentes, para o cenário 2. ... 87
FIGURA 6.15 - Gráfico das diferenças absolutas entre pressões reais e simuladas pelo MIGHA-TRANS obtidas através da manobra suave com as médias das rugosidades calibradas referentes às duas hipóteses de rugosidades reais diferentes, para o cenário 1. ... 89
FIGURA 6.16 - Gráfico das diferenças absolutas entre pressões reais e simuladas pelo MIGHA-TRANS obtidas através da manobra suave com as médias das rugosidades calibradas referentes às duas hipóteses de rugosidades reais diferentes, para o cenário 2. ... 90
FIGURA A.1 - Volume de controle para a equação da continuidade ... 108
FIGURA A.2 - Tensões em um elemento de tubo ... 111
FIGURA A.3 - Distribuição das forças num volume de controle ... 115
FIGURA B.1 – Linha Característica Negativa para reservatório de nível fixo a montante. ... 121
FIGURA B.2 – Linha Característica Positiva para reservatório de nível fixo a jusante. ... 122
FIGURA B.3 – Linhas Características de uma seção interna a um trecho de uma tubulação. ... 122
FIGURA B.4 – Linhas Características para mudança de diâmetro, fator de atrito ou rugosisdade. ... 122
FIGURA B.5 – Linhas Características para nó da rede. ... 122
FIGURA B.6 – Linhas Características para nó da rede com demanda de consumo. ... 122
FIGURA B.7 – Linha Característica positiva para válvula a jusante. ... 122
LISTA DE TABELAS
TABELA 3.1 – Técnicas de calibração de modelos de distribuição de água ... 23
TABELA 5.1 – Valores reais das rugosidades absolutas dos tubos ... 54
TABELA 6.1 – Dados dos nós da rede ... 61
TABELA 6.2 – Características físicas dos tubos ... 62
TABELA 6.3 – Cargas Hidráulicas transientes Observadas no nó 5, para rugosidades reais iguais no cenário 1. ... 64
TABELA 6.4 - Cargas Hidráulicas transientes Observadas no nó 5, para rugosidades reais iguais no cenário 2... 65
TABELA 6.5 - Cargas Hidráulicas transientes Observadas no nó 5, para rugosidades reais diferentes no cenário 1. ... 66
TABELA 6.6 - Cargas Hidráulicas transientes Observadas no nó 5, para rugosidades reais diferentes no cenário 2. ... 67
TABELA 6.7 - Cargas Hidráulicas transientes Observadas no nó 10, para rugosidades reais iguais no cenário 1. ... 69
TABELA 6.8 - Cargas Hidráulicas transientes Observadas no nó 10, para rugosidades reais iguais no cenário 2. ... 70
TABELA 6.9 - Cargas Hidráulicas transientes Observadas no nó 10, para rugosidades reais diferentes no cenário 1. ... 71
TABELA 6.10 - Cargas Hidráulicas transientes Observadas no nó 10, para rugosidades reais diferentes no cenário 2. ... 72
TABELA 6.11 - Estimativas das rugosidades absolutas calculadas pelo MIGHA-TRANS obtidas da manobra brusca referentes às duas hipóteses de rugosidades reais iguais. ... 74
TABELA 6.12 - Estimativas das rugosidades absolutas calculadas pelo MIGHA-TRANS obtidas da manobra suave referentes às duas hipóteses de rugosidades reais iguais. ... 75
TABELA 6.13 - Estimativas das rugosidades absolutas calculadas pelo MIGHA-TRANS obtidas da manobra brusca referentes às duas hipóteses de rugosidades reais diferentes. ... 76
TABELA 6.14 - Estimativas das rugosidades absolutas calculadas pelo MIGHA-TRANS obtidas da manobra suave referentes às duas hipóteses de rugosidades reais diferentes. ... 77
TABELA 6.15 - Comparativo entre pressões reais e simuladas pelo MIGHA-TRANS obtidas através da manobra brusca com as médias das rugosidades calibradas referentes às duas hipóteses de rugosidades reais iguais, para o cenário 1. ... 79
TABELA 6.16 - Comparativo entre pressões reais e simuladas pelo MIGHA-TRANS obtidas através da manobra brusca com as médias das rugosidades calibradas referentes às duas hipóteses de rugosidades reais iguais, para o cenário 2. ... 81
TABELA 6.17 - Comparativo entre pressões reais e simuladas pelo MIGHA-TRANS obtidas através da manobra suave com as médias das rugosidades calibradas referentes às duas hipóteses de rugosidades reais iguais, para o cenário 1. ... 82
TABELA 6.18 - Comparativo entre pressões reais e simuladas pelo MIGHA-TRANS obtidas através da manobra suave com as médias das rugosidades calibradas referentes às duas hipóteses de rugosidades reais iguais, para o cenário 2. ... 84
LISTA DE SÍMBOLOS
[L] – Unidade de comprimento; [M] – Unidade de massa; [T] – Unidade de tempo;
– ângulo formado pelos vetores do gradiente hidráulico observado e calculado;
– Viscosidade cinemática do fluido [L2T-1];
Hcalc– gradiente hidráulico calculado [adimensional];
Hobs – gradiente hidráulico observado [adimensional];
� �⁄ – Derivada da função objetivo; | h - modulo do gradiente hidráulico;
a – Celeridade [LT-1]
aj– Celeridade corrigida [LT-1]
C – Coeficiente de rugosidade de Hazen-Williams [L0,3676T-1];
Ci – demanda do nó i [L3T-1];
CP – Característica positiva;
CN – Característica negativa;
D – Diâmetro da tubulação [L]; dh/dl – gradiente hidráulico; E – Erro;
EMR (%) – Erro Médio relativo [adimensional];
f – Fator de atrito [adimensional];
FO – Função objetivo;
g – Aceleração da gravidade [LT-2];
H – Carga hidráulica [L];
H – Vetor de incógnitas em termos de cotas piezométricas; Hcalc – cargas hidráulica calculada [L];
Hobs– carga hidráulica observada [L];
J – Perda de carga unitária [adimensional];
Jf– Conjunto de nós com carga hidráulica constante;
Ji– Conjunto de nós conectados ao nó i;
K – condutividade hidráulica [LT-1];
m – Coeficiente de perda de carga localizada [L]; n – expoente da formulação perda de carga x vazão; P – Pressão [ML-1T-2];
Q – Vazão [L3T-1];
Qij – Vazão de chegada no nó I pelo tubo j [L3T-1];
r – termo de perda de carga que depende da formulação utilizada; Re – Número de Reynolds [adimensional];
t – tempo [T];
T – Transmissividade [L2T-1];
v – Velocidade média [LT-1];
xij– Inverso da derivada da perda de carga total trecho entre os nós i e j [TL-2];
yij– Fator de correção de vazão dado para tubulações [L3T-1];
Z – Energia potencial [L], cota topográfica [L];
� – Derivada parcial;
H – Perda de carga [L];
– Rugosidade Absoluta [L];
– Peso específico do líquido [ML-2T-2];
– Fator de comprimento de passo;
– Somatório;
ID – Identificação das tubulações e dos nós; sgn – sinal;
cos – cosseno; – Desvio padrão;
Subscritos
i– Nó, índice de vetor e matriz;
j – Nó, tubo;
mín – Mínimo;
LISTA DE SIGLAS E ABREVIATURAS
EPA – Environmental Protection Agency; DLL – Direct Link-Library;
MIGH – Método iterativo de gradiente hidráulico;
MIGHA – Método iterativo de gradiente hidráulico alternativo;
MIGHA-TRANS – Método iterativo de gradiente hidráulico alternativo aplicado a escoamento transiente;
SUMÁRIO
1. INTRODUÇÃO ... 2
1.1. Histórico 2
1.2. Justificativa 4
1.3. Objetivos 5
1.4. Organização da tese 6
2. MODELOS HIDRÁULICOS ... 8
2.1. Conceituação de modelos matemáticos 8 2.2. Modelo de simulação hidráulica para escoamento transiente 9 2.2.1. Equações fundamentais do método das características 11
2.2.2. Condições de contorno 17
3. MÉTODOS DE CALIBRAÇÃO ... 20
3.1. Modelos hidráulicos em regime permanente 25
3.1.1. Procedimentos iterativos 27
3.1.2. Métodos explícitos ou diretos 28
3.1.3. Métodos implícitos ou inversos 29 3.2. Modelos hidráulicos em regime não permanente 31
3.2.1. Métodos explícitos ou diretos 32
3.2.2. Métodos implícitos ou inversos 33
4. MIGHA ... 36
4.1. MIGHA originalmente utilizado 36
4.2. MIGHA adaptado para a calibração de coeficientes de rugosidade de redes
hidráulicas em estado permanente 43
5. METODOLOGIA ... 47
5.1. Reservatórios Fictícios 47
5.2. MIGHA Adaptado para a calibração de parâmetros hidráulicos em redes
hidráulicas em estado transiente 48
5.3. Parâmetros determinados na calibração 49
5.3.1. Estado permanente inicial 50
5.3.2. Simulador hidráulico de estado permanente 51
5.3.3. Manobras de válvula 51
5.3.4. Eficiência da calibração: parâmetros 54 5.3.5. Análise e precisão da calibração: pressões 54
5.4. Estudo de casos 54
5.4.1. Problema-tipo: Identificação das rugosidades absolutas 56
6. RESULTADOS E DISCUSSÃO ... 58
6.1. Programa computacional utilizado 58
6.2. Rede-exemplo 60
6.3. Problema-tipo: identificação das rugosidades absolutas 63
INTRODUÇÃO
Capítulo
1. INTRODUÇÃO
O projeto e a operação de uma rede de distribuição de água dependem do conhecimento de todos os parâmetros envolvidos nos cálculos hidráulicos. A simulação do comportamento hidráulico da rede, quando bem realizada, evita acidentes, rompimentos ou que a água não chegue a determinados pontos da rede.
A simulação hidráulica serve para um sem número de propósitos: ampliação de redes, alteração no traçado, mudança de tubos, dentre outros. É fundamental que se conheça todos os parâmetros físicos envolvidos com o sistema para que se possa simular seu comportamento com a maior fidelidade, resultando em valores de pressão e vazão muito aproximados dos reais.
Dentre todos os parâmetros, a rugosidade das tubulações é o de mais difícil determinação, porque se altera com o desgaste da tubulação. Vários são os fatores que dificultam o cálculo da rugosidade nas redes, entre eles podemos enumerar a incerteza dos dados de demanda dos nós, a quantidade dos pontos de consumo que é muito grande e o grande número de peças e conexões que ocasionam perdas localizadas.
Ao processo de estimativa de quaisquer parâmetros físicos da rede hidráulica, dá-se o nome de calibração.
1.1. HISTÓRICO
Este trabalho realiza um processo de calibração de redes, buscando identificar as rugosidades absolutas em sistemas hidráulicos usados, caso em que este parâmetro hidráulico sofreu alterações devido ao desgaste das tubulações, que ocorre de forma natural, com o tempo. Essa busca será feita durante a ocorrência de um transiente hidráulico. É feito, portanto, um histórico que leva à evolução dos estudos sobre os eventos transiente hidráulicos.
No passado as comunidades se instalavam próximas a rios ou outras fontes de água e quando dela precisavam, bastava ir buscá-la. Assim era o primitivo sistema de abastecimento de água durante vários séculos.
suas casas. As civilizações antigas conhecidas por suas bem-sucedidas conquistas territoriais tinham sistemas de abastecimento de água bastante desenvolvidos.
Entre os séculos VIII e VI a.C, as cidades-estados gregas possuíam fontes que abasteciam reservatórios de água.
A revolução industrial acelerou mais ainda o crescimento populacional e, com ele veio a maior demanda por água nas cidades. Para acompanhar o aumento da demanda por água foi necessário aumentar e modernizar as redes de distribuição.
Um sistema moderno de abastecimento de água é composto por vários elementos, dentre eles, citam-se tubulações, bombas, reservatórios, válvulas, dispositivos de controle, etc. Por se tratar de sistemas um sistema bastante complexo, deve-se entender seus comportamentos estático e dinâmico quando em funcionamento. A realização de manobras em alguns desses elementos ou até mesmo uma queda repentina de energia podem provocar o surgimento de ondas de pressão que se propagam por todo o sistema, podendo provocar o colapso deste. A este fenômeno dá-se o nome de transiente hidráulico.
Documentos relatam que os estudos de transientes se deram inicialmente em vários tipos diferentes de fluidos, que não apenas a água. Há estudos antigos de transientes em fluidos que investigam a propagação de ondas sonoras no ar, na água ou, mais recentemente, em oleodutos e gasodutos.
Segundo SANTOS (2010), o engenheiro italiano Luigi Menabrea, em 1859, foi o primeiro investigador do golpe de Aríete. Joukowski em 1897 realizou experimentos sobre transientes hidráulicos que resultaram no desenvolvimento de uma fórmula para a celeridade da onda considerando a elasticidade da água e do tubo, além de estudos sobre o efeito de dispositivos que atenuam o aumento de pressão provocado pela onda, como chaminés e reservatórios.
Baseados nos estudos de Joukowski, outros autores como Allievi e Schnyder desenvolveram pesquisas nas décadas de 30 a 50 representando graficamente o fenômeno transitório. Até a década de 60, o método gráfico havia se tornado a ferramenta utilizada para a solução dos problemas que envolviam transientes hidráulicos.
WYLIE & STREETER (1993), utilizaram o método das características (MOC) na analise do transiente hidráulico, onde transformaram as equações derivadas parciais em equações derivadas totais. Para isso, eles utilizaram o Método das Características, partindo da condição inicial que normalmente é o regime permanente inicial.
Segundo KOELLE (1983), embora o método gráfico seja atualmente superado pelos métodos numéricos, como ferramenta para a solução dos transientes, aquele deve ser apresentado como recurso didático para a introdução ao estudo dos transientes e ilustração do método das características.
1.2. JUSTIFICATIVA
Os estudos envolvendo fenômenos transientes hidráulicos em redes de abastecimento de água até poucas décadas eram desprezados em projetos. Inúmeros acidentes provocados por transientes hidráulicos aconteceram por causa de tal desprezo. As tubulações das redes devem resistir à pressões máximas que são obtidas durante um evento transiente.
Faz-se necessária a elaboração de um estudo que busque a aplicação de um método mais simples, para a estimativa da rugosidade das tubulações dos sistemas de abastecimento e que alcance bons resultados, verificados a partir da minimização da função objetivo dada pela diferença dos gradientes hidráulicos observados e calculados no domínio do modelo.
O MIGHA-TRANS (Método Iterativo de Gradiente Hidráulico Alternativo aplicado a Transientes Hidráulicos) é um método simples, rápido, requer pouco esforço computacional e atinge resultados satisfatórios na busca do parâmetro em questão.
1.3. OBJETIVOS
O objetivo principal deste trabalho é avaliar a aplicação do Método Iterativo dos Gradientes Hidráulicos Alternativo - MIGHA à calibração, em escoamento transiente, de parâmetros hidráulicos das tubulações dos sistemas de distribuição.
É objetivo deste trabalho, estabelecer uma análise comparativa dos resultados da calibração usando o transiente quando este for provocado por uma manobra lenta e por uma manobra brusca da válvula.
O trabalho visa ainda implementar uma rotina computacional que, em conjunto com o EPANET (simulador hidráulico), utilizando a fórmula universal para simular a rede, possa calibrar as rugosidades absolutas das tubulações funcionando tanto em regime permanente quanto em regime transiente.
1.4. ORGANIZAÇÃO DA TESE
Este trabalho compõe-se de oito capítulos. No presente capítulo procura-se mostrar uma introdução ao tema deprocura-senvolvido, os objetivos e a justificativa e descreve a maneira como a tese foi desenvolvida.
O capítulo 2 traz a conceituação dos modelos matemáticos aplicados a transientes hidráulicos, as equações fundamentais do método das características e as condições de contorno de transientes hidráulicos que ocorrem em redes abastecimento de água.
O capítulo 3 apresenta uma revisão bibliográfica sobre simulação hidráulica das redes de distribuição de água, equações de perda de carga, os vários modelos de simulação existentes, calibração de parâmetros de redes de distribuição de água, modelos de calibração existentes e, principalmente, sobre o método utilizado neste trabalho para a calibração dos coeficientes de rugosidade.
O capítulo 4 explica o método proposto neste trabalho, sua origem, suas aplicações e seu equacionamento.
O capitulo 5 traz a metodologia aplicada, definindo a rotina computacional construída, o simulador hidráulico utilizado, sua interface com a rotina. As manobras de válvula que causarão o fenômeno transiente. As condições de precisão adotadas, bem como a descrição da maneira como serão analisados os parâmetros testados.
O capítulo 6 apresenta os resultados obtidos com a simulação e a discussão desses resultados.
O capitulo 7 apresenta as conclusões desta pesquisa e faz sugestões de estudos posteriores.
MODELOS HIDRÁULICOS
Capítulo
2. MODELOS HIDRÁULICOS
Este capítulo visa definir o que são os modelos matemáticos, explicar por que há tantos modelos diferentes para representar um mesmo sistema real, mostrar que o fenômeno transiente pode ser representado por um modelo matemático que simplifica as condições e representa com um bom grau de fidelidade o comportamento real do sistema.
O capítulo também apresenta o modelo utilizado neste trabalho para a resolução das equações que governam o fenômeno transiente, trata-se do Método das Características, que transforma as equações diferenciais parciais não-lineares em equações diferenciais ordinárias.
2.1. CONCEITUAÇÃO DE MODELOS MATEMÁTICOS
Um modelo matemático equivale à representação de um sistema real,
significando que ele deve representar o sistema real com a maior fidelidade possível, mesmo em diferentes condições. Assim, obter o melhor modelo matemático de um sistema significa estudar as relações entre as variáveis desse sistema para que se possa compreendê-lo, para que, mesmo assumindo diferentes valores para essas variáveis, possa-se controlar o sistema. Portanto, um modelo matemático de um sistema dinâmico pode ser definido como um conjunto de equações que regem a dinâmica desse sistema da forma mais razoável possível. Do exposto, infere-se que vários modelos podem ser criados, entretanto, deve-se escolher o mais aceitável na análise do sistema.
Os modelos matemáticos geralmente consideram várias simplificações com relação ao comportamento real do sistema, entretanto deve-se tomar cuidado com estas simplificações, uma vez que, simplificado em demasia, o modelo pode deixar de representar a realidade. Por outro lado, não sendo feitas algumas simplificações necessárias, perde-se simplicidade, podendo resultar em um modelo complexo demais.
Segundo PEGOLLO (2005), a modelagem matemática deve cumprir as seguintes etapas:
Definição e compreensão do sistema e de seus componentes;
Formulação do problema e elenco das hipóteses necessárias;
Descrição das equações diferenciais que descrevem o modelo;
Solução das equações;
Exame e validação do modelo e das hipóteses consideradas, e
Reanálise do sistema, se for necessário.
A ação de modelar, a modelagem, pode ser aplicada em diversas áreas da
matemática, da física e, no nosso caso, da engenharia hidráulica. Uma aplicação bastante conhecida é a modelagem dos fenômenos hidráulicos transitórios, objeto de estudo deste trabalho. O fenômeno transiente é regido por equações parciais diferenciais não lineares que são convertidas em equações diferenciais ordinárias na resolução da análise.
2.2. MODELO DE SIMULAÇÃO HIDRÁULICA PARA ESCOAMENTO TRANSIENTE
Um regime estacionário ou permanente tem sido entendido como aquele cujas características hidráulicas (velocidade e pressão) não variam com o tempo, ainda que possam variar com a posição.
Podemos definir o transiente hidráulico como aquele escoamento de um fluido pouco compressível que não respeite um regime estacionário. Pode-se entender, portanto, que o transiente hidráulico é o estado não permanente de escoamento em que o fluxo varia de um estado permanente para outro estado permanente de características hidráulicas diferentes.
Sistemas hidráulicos estão sujeitos à ocorrência de transientes uma vez que qualquer mudança em uma das condições de contorno do sistema pode provocar transientes hidráulicos. O estudo dos fenômenos de transientes hidráulicos em redes de abastecimento de água tem sido associado às seguintes condições de contorno:
Abertura ou fechamento de válvulas;
Alteração nas demandas;
Partida ou parada de bombas.
O estudo dos transientes hidráulicos não recebia importância antigamente em virtude das pequenas populações nas cidades, implicando pequenos diâmetros e pequeno comprimento das tubulações, repercutindo baixas pressões na rede.
fenômeno transiente. Partida de bombas, fechamento de válvulas, falta de energia ou outros eventos podem provocar um transiente hidráulico nas redes modernas.
Vários acidentes já ocorreram como consequência da não elaboração de projetos que considerassem a possibilidade da ocorrência do fenômeno. Em 2009, a sétima maior usina hidrelétrica do mundo, a usina de Sayano Shushenskaya na Rússia, registrou um acidente com 75 mortos. O acidente pôde ser destacado como um dos mais mortíferos da engenharia moderna. Um golpe de Aríete provocado pelo fechamento rápido de uma válvula de admissão arrebentou a tampa de uma turbina de 920 toneladas.
Abreu et AL. (1995) classificam os transientes hidráulicos segundo a
possibilidade de simplificações nas equações que descrevem o fenômeno:
a) Transitórios muito rápidos
Correspondem aos golpes de Aríete. Ocorrem com grandes variações de pressão, variando significativamente a energia elástica armazenada no conduto e no fluido. São gerados por manobras muito bruscas, como, por exemplo, fechamento ou abertura de válvulas. Esses transitórios são estudados pelo
modelo inercial elástico que considera os efeitos elásticos no conduto e no
fluido.
b) Transitórios rápidos
Também chamados de coluna rígida. São transientes gerados por manobras bruscas, mas que não armazenam energia no conduto nem no fluido. Esses transientes são estudados através do modelo inercial rígido, que desconsidera
os efeitos elásticos no conduto e no fluido, assim, partem do princípio que nem as paredes do conduto nem o fluido deformam-se durante o transiente. São empregados para descrever os fenômenos de oscilação de massa.
Também chamados de quase estáticos e têm variações de pressão e velocidades lentas. Uma rede de distribuição de água em uma zona residencial sendo abastecida por um tanque. Esse modelo não considera as deformações elásticas do conduto e do fluido, nem a inércia do fluido.
A aplicação do modelo mais adequado evita que sejam desconsideradas grandezas relevantes ao estudo. Neste estudo se propõe o estudo do transiente hidráulico provocado pela abertura e fechamento de uma válvula, utilizando, portanto, o modelo da coluna elástica através do método das características.
As equações diferenciais parciais não lineares que regem o escoamento não têm uma solução analítica simples, por isso é usado um método numérico para transformá-las em equações diferenciais ordinárias. Trata-se do método das características.
2.2.1. EQUAÇÕES FUNDAMENTAIS DO MÉTODO DAS CARACTERÍSTICAS
Os escoamentos transientes em condutos forçados são governados por equações diferenciais parciais não-lineares que representam as leis da quantidade de movimento e da conservação da massa, que escritas em função da vazão, são dadas respectivamente por:
0 2
Q H f
gA Q Q
t x DA
(2.1)
e
2
0
Q H
a gA
x t
(2.2)
onde Q é a vazão, H é a carga, a é a celeridade, g é aceleração da gravidade, f
é o fator de atrito, e A e D são, respectivamente, a área e o diâmetro da seção do
duto. As deduções das equações 2.1 e 2.2 estão contidas no anexo A.
Pretende-se resolver essas equações para se determinar a carga H e a
vazão Q em cada seção da tubulação em função do tempo. Porém, pelo fato de as
O Método das Características é, então, utilizado para a obtenção de uma solução aproximada para valores discretos de x e de t e tem como principal
vantagem o fato de poder eliminar uma das variáveis independentes, ou seja, pode-se trabalhar apenas com a variável x ou t, separadamente.
Reescrevem-se as equações 2.1 e 2.2, como segue:
1 0
Q H
L gA RQ Q
t x (2.3) 2 2 0 Q H
L a gA
x t (2.4) na qual 2 f R
DA. Considera-se uma combinação linear das equações 2.3 e 2.4, isto
é:
1
2
L L
L
(2.5)ou 2 1 0
Q Q H H
a gA RQ Q
t x t x
(2.6)
Se H H x t
, e Q Q x t
, , então as derivadas totais são dadas por:
dQ Q dx Q
dt x dt t
(2.7)
e
dH H dx H
dt x dt t
(2.8)
Então, por definição, tem-se:
1
a
(2.10)
e usando as equações 2.7 e 2.8 na equação 2.6, pode-se escrever:
0
dQ gA dH
RQ Q
dt a dt
(2.11)
se
dx a dt
(2.12)
e
0
dQ gA dH
RQ Q
dt a dt
(2.13)
se
dx a dt
(2.14)
As equações 2.11 e 2.13 somente serão válidas se as equações 2.12 e 2.14 forem satisfeitas, respectivamente. Por imposição do método deve-se eliminar a variável independente x, e converter as equações diferenciais parciais 2.11 e 2.12 em
equações diferenciais ordinárias na variável independente t.
As equações 2.11 e 2.13 são válidas em todo o plano xt, porém a equação
2.11 só é válida ao longo da linha reta dada pela equação 2.12 e a equação 2.13 só é válida ao longo da linha reta descrita pela equação 2.14.
No plano xt as equações 2.12 e 2.13 representam duas linhas retas com
inclinações
1
a
e
1
a
, respectivamente, que podem ser vistas na figura 2.1. Essas linhas são chamadas de linhas características. Matematicamente essas linhas dividemo plano xt em duas regiões, a qual pode ser dominadas por dois diferentes tipos de
FIGURA 2.1 – Linhas Características
Discretizando-se o domínio em trechos x e o tempo em intervalos t,
pode-se obter uma solução numérica.
Assumindo-se que são conhecidas a carga e a vazão no tempo
t t
0, isto é, quando t0 se tem as condições iniciais. Então um processo iterativo é aplicadode modo que conhecendo os valores da carga e da vazão em um dado instante
t t
0é possível calcular os valores da carga e da vazão no instante posterior
t t
0t
. Considerando a figura 2.1, supõe-se que se conhecem os valores de Q eH nos pontos A i
1,t
e B i
1,t
, então, podem-se usar as equações 2.11 e 2.13para calcular os valores no ponto P i t
, t
.Ao se multiplicar os termos da equação 2.11 por
dt
, as derivadas da vazãodQ
dt e da carga dH
dt serão expressas em forma de diferenciais, dQ e
dH
,0
gA
dQ dH RQ Q dt
a
(2.15)
integrando a equação 2.15, vem:
, , ,
1, 1, 1,
0
i t t i t t i t t
i t i t i t
Q H Q
Q H Q
gA
dQ dH R Q Q dt
a (2.16)
Os subscritos
i1,t
e
i1,t
referem-se às posições dos nós, anterior,1
i , e posterior, i1, no passo de tempo anterior, t. Já o subscrito
i t, t
indicavalores da posição atual no passo de tempo posterior, ou seja, os valores a serem determinados.
Podem-se calcular as duas primeiras integrais da equação 2.16, entretanto, o terceiro termo não é possível, pois, a variação de Q em relação a t não é explícita.
Usando uma aproximação de primeira ordem, encontramos o valor para a integral do terceiro termo:
, 1,1, 1, 1, 1,
i t t
i t Q
i t i t i t i t
Q
R Q Q dt RQ Q t t t R tQ Q (2.17)
Em outras palavras, supõe-se que a vazão Q permanece constante do
ponto A ao ponto P. Logo, substituindo a equação 2.11 na equação 2.10, obtém:
i t,t i1,t i t,t i1,t i1,t i1,t 0 gA
Q Q H H R tQ Q
a
(2.18)
A equação 2.18 é exata, exceto para o termo contendo o coeficiente de
atrito (
R
f
2
DA
). Se o termo R for muito grande, pode ocorrer uma instabilidadenumérica, portanto, para evitar tal fato devem-se usar intervalos de tempo menores.
De maneira análoga pode-se fazer o mesmo procedimento com a equação 2.13 obtendo:
i t,t i1,t i t, t i1,t i1,t i1,t 0 gA
Q Q H H R tQ Q
a
Com as equações 2.18 e 2.19, que são soluções das equações 2.11 e 2.13, pode-se montar um sistema de duas equações nas variáveis
Q
i t,t e Hi t,t.Podem-se escrever as equações 2.18 e 2.19 da seguinte maneira:
, 1, , 1, 1, 1,
: 0
a
i t t i t i t t i t i t i t
C Q Q C H H R tQ Q (2.20)
e
, 1, , 1, 1, 1,
: 0
a
i t t i t i t t i t i t i t
C Q Q C H H R tQ Q (2.21)
onde CagA
a .
As equações 2.20 e 2.21 podem, em termos de simplificação, ser escritas da seguinte forma:
, ,
:
p a
i t t i t t
C Q C C H (2.22)
e
, ,
:
N a
i t t i t t
C Q C C H (2.23)
onde:
1, 1, 1, 1,
P i t a i t i t i t
C Q C H R tQ Q (2.24)
e
1, 1, 1, 1,
N i t a i t i t i t
C Q C H R tQ Q (2.25)
A equação 2.22 é válida ao longo da linha de característica positiva AP e
a equação 2.23 é válida ao longo da linha de característica negativa BP (figura 2.1).
Os valores de
C
P eC
N são conhecidos para cada intervalo de tempo e aequação de característica positiva e a equação 2.23 de equação de característica negativa.
Somando as equações 2.22 e 2.23 e simplificando o resultado, obtemos o valor da variável
Q
i t,t, a saber:,
2 P N i t t
C C
Q (2.26)
Substituindo a equação 2.20 em uma das equações, 2.22 ou 2.23, obtém-se o valor da variável Hi t,t, ou seja:
, 2
P N
i t t
a
C C
H
C (2.27)
2.2.2. CONDIÇÕES DE CONTORNO
Do item anterior percebe-se que o método das características fornece, para cada ponto, duas equações características, com elas, pode-se montar um sistema e calcular as duas incógnitas naquele ponto, a carga piezométrica e a vazão. Mas há pontos específicos do sistema em que apenas uma das equações características é válida, como por exemplo, os extremos de uma tubulação ou alguma singularidade do sistema. Em determinados casos, a montante do tubo, apenas a característica negativa é válida (Figura 2.2a), ou a jusante do tubo, apenas a característica positiva é válida (Figura 2.2b). Nestes casos, teremos apenas uma equação, mas duas incógnitas permanecem: carga piezométrica e vazão. Para resolver o sistema necessita-se de outra relação nas incógnitas H e Q, essa relação é denominada condição de contorno do problema e depende do tipo de elemento (contorno), podendo ser um reservatório, uma válvula, um nó com vários tubos, um nó com demanda, uma bomba ou outra singularidade.
B P i+1 i t t+1 C -x t B P i+1
i t
t+1
C+
x
(a) (b)
No apêndice B seguem demonstradas todas as equações que representam as condições de contorno envolvidas no cálculo transiente de uma rede hidráulica.
MÉTODOS DE CALIBRAÇÃO
Capítulo
3. MÉTODOS DE CALIBRAÇÃO
De acordo com WALSKI (1983), calibração é o ajuste dos parâmetros de um modelo para que se melhore a relação entre os dados observados e prognosticados por ele. Estes dados podem ser demandas nodais, coeficientes de rugosidade, diâmetros e outros.
Segundo SILVA (2006), calibração é o processo de identificação de parâmetros necessários para que a simulação hidráulica de redes de distribuição de água represente com fidelidade o comportamento do sistema. O procedimento de calibração fornece, portanto, uma estimativa de parâmetros do sistema, não conhecidos (por não existirem dados cadastrais) ou alterados (por causa da idade do sistema) para que, em análises posteriores, se possa avaliar com boa aproximação, o comportamento do sistema hidráulica em situações diferentes da atual, como, por exemplo, no caso da inserção de novas tubulações, inserção ou retirada de válvulas, substituição de algumas tubulações ou mesmo no caso de vazamentos ou de mudanças de cenários de demandas.
Os métodos aplicados ás redes hidráulicas para calibração, otimização ou outra finalidade podem, dependendo da situação, ser abordados como um problema direto ou como um problema inverso.
Os problemas diretos têm como exemplo mais conhecido o caso clássico dos projetos, uma vez que demandas, diâmetros, rugosidades de tubos novos e todas as outras características físicas da rede são conhecidas, pretendendo-se calcular as vazões nos tubos e as cargas hidráulicas nos nós da rede hidráulica.
No problema inverso, conhecemos algumas cargas hidráulicas e vazões e, a partir destas, calculamos parâmetros físicos da rede, como rugosidades, diâmetros, fatores de atrito, etc. Segundo VELHO (2008), o astrofísico georgiano Viktor Amazaspovich Ambartsumian foi quem primeiro utilizou a expressão problema inverso (PI), assim definindo-a: “Resolver um problema inverso é determinar causas
desconhecidas a partir de efeitos desejados ou observados”.
O problema inverso é, portanto, utilizado quando se pretende determinar tais parâmetros de uma rede hidráulica em funcionamento, em projetos de ampliação da rede, detecção de vazamentos, reformas, operação, calibração, etc.
Os métodos inversos diretos buscam resolver o sistema de equações diferenciais considerando os parâmetros desconhecidos como variáveis, assim, o conjunto de n parâmetros desconhecidos é obtido diretamente da resolução de um sistema de n equações não-lineares, neste caso, o número de medições deve ser igual ao número de parâmetros desconhecidos.
Os métodos inversos indiretos funcionam iterativamente através de simulações, variando os parâmetros desconhecidos até a convergência do processo. SUN (1994) coloca que o método indireto tenta retirar a participação do homem na decisão final da escolha. A diferença entre o método indireto e o método de tentativa e erro é que neste, o pesquisador usuário do método toma a decisão quanto à satisfatoriedade da solução, enquanto naquele o processo, que é iterativo, será rodado até a obtenção de uma solução próxima a do sistema real através de um valor limite para o erro. O princípio básico da função objetivo é o requisito do atendimento a uma função objetivo que minimiza a diferença entre os dados observados e calculados. O processo se começa por um “valor inicial arbitrário” que pode ser aleatório ou baseado em alguma informação conhecida como, por exemplo, os materiais de que os tubos de uma rede hidráulica são compostos. Após uma iteração (simulação), comparam-se os resultados, se a diferença entre os dados observados e calculados atender aos critérios de parada (estabelecidos previamente), finda-se o processo utilizando-se aquele parâmetro “arbitrado” inicialmente, senão, corrige-se (atualiza-se) o parâmetro de acordo com o método utilizado (no nosso caso, o MIGHA) e realiza-se uma nova iteração. O processo ocorre até que os critérios de parada sejam atendidos.
O MIGHA, utilizado neste trabalho, é um método inverso indireto. Inverso porque parte de dados medidos de cargas hidráulicas, indireto por ser um processo iterativo.
Matematicamente, problemas inversos pertencem à classe dos problemas
malpostos. No início do século passado, o matemático francês Jacques hadamard
definiu um problema matematicamente bem-posto como sendo aquele que cumpre
Muitas são as análises na engenharia que utilizam o problema inverso: análise modal experimental, estimativa de parâmetros, identificação de forças de entrada, problemas de identificação (localização e quantificação) de falhas, como vazamentos, por exemplo. Os problemas inversos possuem inúmeras soluções, já que existem muitas variáveis, diferentes combinações destas podem levar a uma solução do problema que não seja a desejada. Segundo (ARAÚJO, apud PUDAR & LIGGETT,
1992), esta “não unicidade” da solução do problema pode ser resolvida acrescentando-se mais medições de determinadas variáveis.
Uma característica dos problemas inversos é a oscilação da solução, conhecida como instabilidade. Em vários métodos utilizados para resolver problemas inversos, a instabilidade é responsável pelo fato de a solução encontrada não ser o ótimo global (máximo ou mínimo absoluto), e sim, um ótimo local (máximo ou mínimo relativo), ou seja, os dados observados e calculados são iguais, mas os parâmetros estimados não são iguais aos reais.
Neste trabalho, o problema inverso é formulado como segue: dadas medidas de cargas hidráulicas transientes em um ou mais nós de uma rede hidráulica, obter os valores de parâmetros de forma a buscar uma solução ótima, através de um ótimo ajuste entre os valores observados e calculados das cargas hidráulicas.
A resolução do problema inverso segue o procedimento indireto com a minimização da diferença quadrática entre os resultados observados e calculados. Assim:
= ∑ ∑(�, − �, ) =
�� =
(3.1)
Onde: TS = duração do transiente; NL = número de locais de medida da rede;
Hi,jm = carga hidráulica observada; Hi,jc = carga hidráulica calculada; i = 1,2,..., NL; e j
= 1,2,..., TS.
A aplicabilidade dos modelos de redes hidráulicas depende da precisão dos dados de entrada (ORMSBEE & LINGIREDDY, 1997).
CHEUNG & SOUZA (2001) destacam que as técnicas de calibração se dividem em duas categorias: as que calculam apenas as rugosidades dos tubos e as que calculam simultaneamente as rugosidades e as demandas nodais.
As companhias de saneamento obtêm dados de demandas em nós da rede através de micromedição e macromedição das unidades consumidoras. Tais medidas são imprecisas devido a vários fatores tais como falhas de cadastro por parte da companhia, fraudes, ligações clandestinas, consumos faturados estimados, consumos não-faturados não-medidos (incêndios, etc.), erros de medição provocada por hidrômetros descalibrados ou velhos e, finalmente, por vazamentos ao longo da rede de distribuição.
Do exposto, percebe-se a incerteza dos dados de demandas nodais, as perdas localizadas e, verifica-se que o parâmetro mais difícil de ser identificado em um sistema de distribuição de água é a rugosidade dos trechos componentes do sistema. Diante disso a calibração simultânea das rugosidades dos tubos e dos consumos dos nós é mais eficiente em redes de distribuição.
Vários modelos hidráulicos têm sido propostos, tanto em regime permanente quanto em regime transiente. A tabela 3.1 apresenta um resumo feito por WALSKI (2003) das principais técnicas de calibração publicadas. Note na tabela, que há técnicas aplicadas nos dois tipos de regime, permanente e transiente. Os modelos são divididos em iterativos, explícitos e implícitos.
TABELA 3.1 – Técnicas de calibração de modelos de distribuição de água
Referência do modelo Tipo de modelo1
Modelo Hidráulico2
Variáveis de decisão3
Método de Otimização
Rahal, Sterling e Coulbeck
(1980) PI EP CR -
Walski (1983), Walski (1986) PI EP FF, DEM -
Bhave (1988) PI EP FF, DEM -
Ormsbee e Wood (1996) EX EP FF -
Ormsbee e Lingireddy (1997) IM EP ou STE FF, DEM Extended complex
method of box
Boulos e Wood (1990), Boulos e
Wood (1991) EX EP
Qualquer
Boulos e Ormsbee (1991) EX EP Qualquer
parâmetro -
Lansey e Basnet (1991) IM EP ou STE FF, DEM, CV
Baseado no método do gradiente reduzido
generalizado
Datta e Sridharan (1994) IM EP FF Técnica de análise
de sensibilidade Ferreri, Napoli e Tumbiolo
(1994) EX EP FF -
Savic e Walters (1995) IM EP FF Algoritmos
Genéticos (AGs)
Reddy, Sridharan e Rao (1996) IM EP CR, DEM Gauss-Newton
Walters, Savic, Morley, de
Schaetzen e Atkinson (1998) IM EP CR AGs
Greco e Del Guidice (1999) IM IM EP FF LINDO
GINO
Todini (1999) IM EP FF Filtro de Kalman
Pudar e Ligget (1992) IM EP VZ
Levenberg-Marquardt
Liggett e Chen (1994) IM EP FF, VZ
Levenberg-Marquardt
Chen (1995) IM ET FF, VZ, VA
Levenberg-Marquardt Vitkovsky e Simpson (1997),
Simpson e Vitkovsky (1997), Vitkovsky, Simpson e Lambert (2000)
IM ET FF, VZ AG
Tang, Karney, Pendlebury e
Zhang (1999) IM ET FF, DEM AG
Wu, Boulos, Orr e Ro (2000) IM EP FF AG
Wu et al, (2002a), Wu ET AL
(2002b) IM, PI EP
FF, DEM,
VS, ST AG-modificado
1) PI – Procedimento iterativo; IM – Procedimento implícito; EX – Procedimento explícito. 2) EP – Estado permanente; STE – Simulação de tempo estendido; ET – Estado transiente. 3) CR – Coeficiente de rugosidade; DEM – Demanda nodal; FF – Fator de fricção;
Pela tabela 3.1, os modelos computacionais podem simular o comportamento hidráulico da rede, tanto em regime permanente quanto em regime transiente. Basicamente, a diferença entre eles reside nas variações das condições de operação do sistema em função do tempo.
Neste capítulo, alguns métodos relevantes serão citados, classificados de acordo com o regime, permanente ou transiente, detalhando o tipo de modelo: iterativo, explícito ou implícito.
3.1. MODELOS HIDRÁULICOS EM REGIME PERMANENTE
A simulação em regime permanente considera que as condições de contorno em um ponto são invariáveis, com relação ao tempo, incluindo as demandas, a operação das bombas, a abertura das válvulas ou o nível dos reservatórios. Neste regime, o cálculo hidráulico assume um único cenário, o que não condiz à realidade, uma vez que, as condições de funcionamento da rede variam ao longo do tempo em redes reais.
Para obter a solução no cálculo das redes, deve-se satisfazer às seguintes condições:
1) A soma algébrica das vazões deve ser nula em qualquer nó;
2) A soma algébrica das perdas de carga nos trechos de um anel qualquer deve ser nula;
3) Cada elemento da rede deve satisfazer a relação entre a perda de carga e a vazão.
O balanceamento das redes malhadas apresenta dificuldades em virtude da não linearidade das equações de perda de carga, daí surgirem vários métodos para a resolução do problema.
McILROY (1950), SURYAPRAKASAM, REID e GEYER (1950), HOAG e WEINBERG (1957) e McPHERSON e RADZIUL (1958) estudaram o método da analogia elétrica, onde uma rede era comparada com um circuito elétrico.
O método de Newton-Raphson foi utilizado por MARTIN & PETERS (1963)
para o balanceamento de redes hidráulicas, o método era iterativo e possuía uma convergência mais eficiente que o método de Hardy-Cross.
LAM & WOLLA (1972) adaptaram o método de Newton-Raphson para as
equações dos nós. O modelo exige menor tempo de processamento computacional em comparação ao método de Newton-Raphson padrão.
WOOD & CHARLES (1972) desenvolveram o método da teoria linear apresentando rápida convergência através da linearização da equação da perda de carga.
3.1.1. PROCEDIMENTOS ITERATIVOS
Segundo COSTA (2008), os procedimentos iterativos são baseados no artifício de tentativa e erro. Foram os primeiros métodos de calibração a serem estudados e realizam a atualização dos parâmetros, em cada iteração, baseando-se nas cargas hidráulicas e vazões obtidas pela execução do modelo de simulação.
No método iterativo, atribuem-se valores aos parâmetros desconhecidos para, em seguida, comparar-se valores observados e simulados de pressão, carga hidráulica ou vazão. Define-se uma faixa aceitável para o erro. Após um número finito de iterações do processo, atinge-se essa faixa, consequentemente, encontrando a solução do problema.
Segundo TUCCI (1998), os modelos iterativos possuem quatro características básicas:
• Definição do ponto de partida – é a atribuição inicial do parâmetro a ser calibrado. Sua importância reside reside na demora do processo de convergência, caso o chute inicial seja distante do parâmetro real.
• Direção da pesquisa – deve-se sempre buscar um mínimo de tentativas, com um máximo de aproximação por tentativa.
• Espaçamento de cada alternativa – cada alternativa envolve o cálculo da função objetivo para o parâmetro que se quer buscar. O espaçamento é definido para minimizar o número máximo de tentativas. Dependendo do espaçamento de cada alternativa, o processo pode levar a ótimos locais ao invés de um ótimo global.
3.1.2. MÉTODOS EXPLÍCITOS OU DIRETOS
O conjunto de n parâmetros desconhecidos é obtido diretamente a partir da resolução de um sistema de n equações não-lineares.
Também conhecidos como métodos analíticos ou diretos, estes métodos exigem que o número de medições seja igual ao número de parâmetros desconhecidos.
WALSKI (1983) desenvolveu uma técnica baseada no agrupamento de tubos equivalentes onde o coeficiente de rugosidade é calculado a partir de vazões e pressões observadas para duas condições de escoamento distintas. BHAVE (1988) aplicou nesta técnica um fator de ajuste global para a correção dos coeficientes de rugosidade dos tubos.
ORMSBEE & WOOD (1986) propuseram um processo de determinação dos coeficientes de rugosidade a partir de observações de vazões e pressões feitas em testes de incêndio sob determinadas condições de contorno.
BOULOS & WOOD (1990) apresentaram um algoritmo explícito que determina valores ótimos de parâmetros de projeto, operação e calibração de redes de distribuição de água. Tais ótimos podem ser calculados para encontrar as restrições específicas de vazão e pressão sob diversas condições de operação.
BOULOS & ORMSBEE (1991) verificaram que o método descrito por ORMSBEE & WOOD (1986) necessitava de que vários testes de incêndio fossem realizados simultaneamente. Assim, aperfeiçoaram o método para que diversos testes de incêndio fossem realizados em tempos diferentes sob diversas condições de contorno.
O método proposto por FERRERI, NAPOLI & TUMBIOLO (1994), utilizando o método de Newton-Raphson para a resolução das equações não-lineares no processo
de calibração, avalia os coeficientes de rugosidades da rede utilizando pressões e vazões em determinados pontos de observação. Os autores concluem que o melhor período para obtenção dos dados é o noturno.
3.1.3. MÉTODOS IMPLÍCITOS OU INVERSOS
Os métodos implícitos partem de algumas informações de pressão e vazão da rede e recorrem ao uso de uma função objetivo para a aproximação do problema inverso, que consiste em minimizar essa função objetivo, geralmente o módulo da diferença entre os valores de dados observados e calculados de pressão e/ou vazão do sistema.
Para WALSKI (1986) é aceitável uma diferença de 7% entre os valores calculados e observados para as pressões estáticas e dinâmicas. Para ORMSBEE & LINGIREDDY apud CHEUNG (2001), dependendo da aplicação do modelo, é
considerado satisfatório um desvio máximo entre 5% e 10% para os valores de pressão, vazão e nível d’água nos reservatórios.
ORMSBEE (1989) ajustou as rugosidades para diversas condições de carga em regime permanente, para período de operação estendido, utilizando um algoritmo de otimização não-linear.
De forma similar, LANSEY & BASNET (1991) incorporaram um modelo de simulação hidráulica ao algoritmo de programação não-linear para a calibração de coeficientes de rugosidade, aberturas de válvulas e demandas nodais. Com relação a função objetivo, o estudo apresentou duas opções: soma dos quadrados e valores absolutos das diferenças entre valores observados e estimados de vazões nas tubulações e energias nos nós. Os resultados apresentaram maior velocidade com a divergência quadrática.
DATTA & SRIDHARAN (1994) propuseram a minimização dos quadrados das diferenças dos valores observados e calculados incluindo pesos nos desvios dos valores na função objetivo. Os pesos são adotados a partir dos valores observados para as diferentes condições de demanda. O método apresenta a vantagem de poder ser utilizado em diferentes cenários de demandas com variado número de medidas de pressão e vazão para cada condição. As incertezas dos valores estimados foram analisadas com técnicas de sensibilidade.
A técnica estocástica dos algoritmos genéticos baseada na seleção natural de
Darwin foi utilizada por SAVIC & WALTERS (1997) como método de busca no
processo de otimização. A técnica visa melhorar a precisão dos resultados de redes de distribuição mais complexas. Diversos usos dos algoritmos genéticos foram descritos no trabalho. A técnica apresentou resultados melhores que os métodos de tentativa e erro na calibração de coeficientes de rugosidade.
Algoritmos genéticos são utilizados em vários outros trabalhos. WALTERS et al. (1998) na determinação das rugosidades absolutas, De SCHAETZEN et al.(2000)
nas rugosidades absolutas, diâmetros e demandas nodais e, LINGIREDDY & ORMSBEE (2002) na avaliação de rugosidades absolutas e demandas.
RIGHETTO (2001) propõe um modelo baseado no método dos nós e na técnica dos elementos finitos utilizando algoritmos genéticos para a determinação de demandas nodais, rugosidades absolutas e diâmetros das tubulações.
Buscando a redução do tempo de processamento nas simulações, KAPELAN, SAVIC & WALTERS (2002) propõem um método híbrido para a determinação das rugosidades absolutas e detecção de vazamentos em redes de distribuição de água em regime transiente onde algoritmos genéticos foram utilizados como método de busca global em conjunto com um método de busca local (Levenberg-Marquardt) para
refinamento da solução final.
GRECO & DEL GUIDICE (1999) utilizaram uma matriz de sensibilidade para a otimização não-linear, além de pacotes computacionais para calibração dos coeficientes de rugosidade de redes de distribuição de água.
LANSEY et al. (2001) elaboraram um estudo com o objetivo de analisar as
incertezas provocadas pelos erros nos valores medidos em campo e estimados. O procedimento, que consta de três passos: estimativa dos parâmetros, avaliação da calibração e uma metodologia para coleta de dados, considera as incertezas nos valores observados e simulados e proporciona o grau de incerteza da solução final.