='c-UNIVERSIDADE DE EVORA
Departamento
de
Flsica
Medigdo
de
impedAncias
usando
Conversores
Analogico
Digitais
e
Algoritmos de
Processamento
de
Sinal
Mouhaydine Tlemgani
Dissertagdo
apresentada
d
Universidade
de
Evora para a obtengio
do grau
de
Doutor
em
Engenharia Electrot6cnica
Orientador:
Professor Doutor Pedro
Miguel
Ramos
Co-orientador.
Professor Doutor
Ant6nio
Manuel da Cruz Serra
Esta
fese
ndo
inclui
as
crfticas
e
sugesfdes
do
jhri
.-l
qli:'+'l
+l
Agradecimentos
Agradego
A
todos os que de uma forma directa ou indirecta contribuiram para a execugSodeste trabalho
proporcionando
apoio
cientifico, meios informiticos,
livros,apontamentos, coment6rios e condig6es paraa sua realizagdo.
De
entre todos permito-me destacaro
Prof.
Dr.
PedroMiguel
Ramos,o
meuorientador,
e o
Prof.
Dr. Antonio
Manuel
da
Cruz
Serra,o
meu co-orientador. Pelalricida e paciente orientagEo que me t6m prestado ao longo deste tempo. Pela anizade,
as ideias, a presenga constante dos seus conselhos e a solidariedade permanente que me
t6m demonstrado em todos os momentos altos e baixos. Os meus agradecimentos v6o
tamb6m
ao Instituto de
Telecomunicag6ese d
secg5ode
Electrotecnia Te6rica
eMedidas El6ctricas
do IST,
ondetanta
coisa aprendie
pela
simpatiae
o
apoio
quesempre 16 encontrei nomeadamente das pessoas funcion6rios e docentes entre os quais o
Professor Manuel Fonseca da Silva e do Professor Ferreira Fernandes.
Ao
Departamento de Fisica da Universidade de Evora, pelas condig6es e apoio concedidos, nomeadamente pela concessdoda
dispensade
servigo docente.Um vivo
agradecimento
a
todos
os
colegasdo
Departamento,em
particular
aos colegas quetiveram que desempenhar tarefas pedagogicas e outras durante o tempo em que estive a
trabalhar nesta tese. Aos meus colegas de gabinete o Prof.
Rui
Salgado e o Eng.o PauloCanhoto
um
especial agradecimento,pela disponibilidade,
pelasideais
e
discussdescientificas
queforam
decisivasno
meu trabalho.Ao
ProfessorAnt6nio
Heitor
Reis,ao Professor Fernando Janeiro, o meu companheiro de viagens a Lisboa, pelo incentivo,
amizade e ajuda.
Ao
Centro de Geofisica de Evora pelos meios postosi
minha disposigSo, pelomaterial de apoio, pelo
incentivo
e carinho que recebipor
parte deste organismo. Umespecial
agradecimentopara
o
ProfessorMourad
Bezzeghoud,o
Professor BentoCaldeira, o Professor Fernando Borges e o Eng.o Jos6 Pombinho.
A
Ana Maria, aminha
amiga, pelo incentivo, a preocupagSo e por tudo.Por
fim,
d minha Sarinha, d Noca e ao Harounito pela paci6ncia,o
carinho e olndice
Agradecimentos...
... iaaindice
...v
L lntrodugio
...1
Refer6ncias..
...,..,..7II.
M6todo deadaptaglo
desinus6ides
...9
2.1 IntrodugSo
...92.2
M6todo de adaptagSo de sinus6ides de tr6sparemetros
...112.3
M6todo de adaptag5o de sinus6ides de quatroparametros
...142.4
M6todo de adaptagSo de sinus6ides de 4+4parSmetros..
... 162.5
M6todo de adaptagSo de sinus6ides de 4+3par6metros..
...162.6
M6todo de adaptagSo de sinus6ides de setepar6metros..
...t72.7
Simulageonum6rica
...2O2.7.L
M6todo de tr6spar6metros
...2O2.7.2
Mdtodo de quatropar6metros
,....,.,,.,,,,,.,.,...242.7.3
Mdtodo de 4+4par6metros..
...312.7.4
M6todo de 4+3par6metros..
...342.7.5
M6todo de setepar6metros..
... 372.7.6
Depend6ncia do M6todo de sete parAmetros do nrimero de pontos adquiridos...412.8 Conclus6es...
...43Refer6ncias..
...44III.
MedigSo deimped6ncias...
...45
3.1 IntrodugSo
.,....,...453.2
Montagemexperimental
...453.3
AplicagSo do m6todo de 4+4parSmetros
...493.4
AplicagSo do m6todo de 4+3parametros
...563.5
Aplicageo do m6todo de setepar6metros
...643.5
Influ6ncia da incerteza da impedSncia de refer€ncia...
...753.7 Conclus6es...
... 81Refer6ncias..
...82IV.
M6todo de adaptagSo deelipses...
...83
4.L IntrodugSo
...834.2
DescrigSo dom6todo
...844.3
SimulagSonum6rica
....,,,914.3.1
Desempenho do algoritmo em fungEo da diferenga defase,
...,...,,....924.3.2
Dependdncia do desvio padrSo da fase em relagSois
amplitudes. .,,...944.3.3
Estimativa das amplitudes....
... 1014.3,4
Depend6ncia do algoritmo das elipses do numero de pontos adquiridos... 1024.4
Conclus6es...Refer6ncias..
... 105v.
MedigSo de imped6ncias pelo m6todo deadaptagio
deelipses
...aO75.1 IntrodugSo
... 1075.2
Montagemexperimental
... 1085.3
AplicagSo do mdtodo de adaptagSo deelipses
... 1105.4
Influ6ncia da incerteza da imped6ncia dereferAncia...
... 1195.5
ComparagSo com o m6todo de seteparSmetros..
... 1235.6 Conclus6es...
...125Refer6ncias..
... L27Vf. Conclus6es...
...129
Refer6ncias..
... 134Ap6ndice A. Transformada Discreta de
Fourier
...137
A.1
DescrigSo da DFT interpolada(IpDFT)...
... 141Refer6ncias..
... L44 Ap€ndice B. ConfiguragSo das medidas de impedOncia pelo medidor de imped6nciasAgilent
4294A
...145
t.
lntrodugao
A
medida
assumeuma importtncia
cada
vez
maior nas
ciOnciase
nastecnologias modernas ao ponto de
constituir
umadisciplina
i
parte. a metrologia. Osprogressos realizados
na
medidalevam
a um
melhor
conhecimentodos
fen6menosfisicos.
Em
contrapartida estesexigem
uma
cadavez maior
extensEoda
medidaacompanhada
por
umamaior
precisdoe
exactidEo dos sensores e instrumentos que a servem. Nestes contextos, as medidasde
impeddnciast6m
desempenhadoum
papel preponderante em dominios tdo transversais como a electrotecnia, afisica,
a quimica, amecinica ou a medicina
[1].
Seja no laboratorio ou no meio industrial, a transdugEo dasv6rias grandezas fisicas como a temperatura, forga, press6o,
nivel,
caudalou
at6 umaconcentragSo quimica, etc., 6 muitas vezes traduzida na variagdo de impedincia.
A
nog6o deimpedincia
foi
pela primeira vez introduzidapor Oliver
Heavisideem 1886 como generalizag5o da
Lei
de Ohm.A
impeddncia el6ctrica mede a oposigEoi
passagem de uma corrente num circuito el6ctrico.As
medidas de impeddncias sdo tradicionalmente efectuadasutilizando
pontesequilibradas
por
impeddncias padr6o, por medidores de factores de qualidade ou aindapor
medidores
vectoriais anal6gicos
de
impedincias
12-71.
Os
medidores
deimpedtncias
s6o usados para testar componentes electr6nicos,circuitos
e
materiais.Existem v6rios
mdtodosde
medida
de
impeddncias, cadauma com uma
gama
defrequ6ncia especifica
onde produz
melhores resultados.
Os
m6todos
tradicionaisincluem pontes ndo compensadas, pontes auto compensadas, ressonincia,
f-V,
RF
I-V,
experimentais,
como
uma
redugSosignificativa
do
tempo
de
medida.
Os
metodos usadospelos
sistemas comerciaisde
medidade
impeddncias dependemda
gama defrequdncia em que funcionam os dispositivos. Para
a
gama de frequdnciasde
I0 Hz
a100
kHz, os
m6todosmais
usuais sdo
as
pontes simples,
I-V
e
as
pontes
auto compensadas. Consoante ovalor
do m6dulo daimpedincia,
diferentes tipos de ligagdoest5o disponiveis para obter os melhores resultados, entre eles est6o as ligag6es de dois,
tr6s, quatro e cinco terminais e pares de quatro terminais. Estes s6o usados para
redtzir
os efeitos do ruido e os efeitos do comprimento dos cabos de ligag6o.
Os dispositivos comerciais incluem habitualmente complexos procedimentos de
calibragdo para assegurar
a
correcta operacionalidadedo
instrumentoe
mantera
sua precisdo.A
necessidade de um procedimento complexo deriva da estrutura da interfaceelectr6nica
do
instrumento. Estesmodulos
sdo dependentesda
frequdnciae
exigemfrequentes calibrag6es para
corrigir
os erros que adv6m desta dependdncia e os erros dedesvio e de ganho. Os sistemas de medida de impeddncias disponiveis no mercado s6o
ou
de
custo reduzido, masde
alcancemuito limitado
em
termosde
frequCncias, oudispendiosos
e
precisos.A
Agilent
Technologies6 uma
das empresasde
ponta parasistemas dispendiosos.
O
seu
sistemamais
simples,
com
alcanceno
dominio
dafrequ6ncia entre
40
Hz
e
ll0
MHz,
usauma ponte auto
compensadacom
um
errorelativo
de 0,08
%
lg}No
entanto,o
seu prego queronda os
30000€ coloca
estesistema
muito
acima das capacidades orgamentais de muitas empresase institutos
deinvestigagdo. Sistemas mais baratos sdo menos precisos e
a
gama de frequCncias onde operam6
extremamente curta (dispondopor
vezes de menos de dez valoresfixos
de frequ6nciai
escolha do utilizador).A
tendCncia mais recente em instrumentagdo e medida 6 baseada na utilizag5o de conversores anal6gicodigitais (ADCs
-
Analog
toDigital
Converters), gragasao
seunot6vel
progresso,
nos irltimos anos,
em
termos
de
resolugdo
e
frequCncia de amostragem. Os actuais conversores analogico digitais s6o mais baratos, mais r6pidos e melhores devido aos grandes investimentos levados a cabo pela indtistria da electr6nicade
consumo.
Depois
da
digitalizaqdo
6
possivel implementar algorinnos
emprocessadores
digitais
de
sinal que, at6 h6
poucos anos,
estavamlimitados
pelascapacidades
de
c6lculo dos
computadores pessoais.Novamente,
desenvolvimentosrecentes nesta 6rea
tornaram
os
processadoresdigitais de sinal
mais
baratos, maisr6pidos, com maior poder de processamento e com mais capacidades: portas de entrada
e
saida, mem6ria,ADCs
e conversoresdigitais
analogicos@ACs
-
Digital
toAnalog
Converters).
Esta
combinag6o est6a
provocar
uma
revolugdona
instrumentagSo emedida
que
est6a
desenvolver instrumentosmais
baratose
vers6teis.A
base destaevolug6o
s6o
os
algoritmos
de
processamentode
sinal.
Uma
grande variedade dealgoritmos
no dominio do
tempo,
da
frequCncia,no dominio misto do
tempo
e
dafrequ6ncia
e
de
correcgdo,estllo
disponiveis
para
implementagEoem
dispositivosbaseados
em
processadoresdigitais
de
sinal
[4], [5],
[0],
[1].
Entre
estes, osalgoritmos
de
optimizagSo usandoo crit6rio
dosminimos
quadrados, s6o robustos efrequentemente usados
em muitos
camposda
instrumentagdoe
medida,
incluindomedidas de impedtncia.
Uma maneira de aumentar o desempenho dos medidores de imped0nciaered:uzir
a quantidade de componentes da electronica analogica afim de reduzir a depend6ncia do
instrumento em relagEo
is
diferentes variag6es da frequCncia e dainflu6ncia
do ruido,da temperatura, etc...,
6
melhorar osalgoritnos
de processamento de sinal[2].
associados a
um
computador pessoal, permitindo a utilizaqdo deum
novo algoritmo deprocessamento de sinal.
Neste
contexto,
foram
concebidast6cnicas
inovadorascom
o
objectivo
demelhorar o desempenho dos algoritmos de processamento de sinal e, por consequ6ncia,
dos
instrumentos
digitais que
os
incluam.
Essas t6cnicas
permitem
dispensar o conhecimento exacto da frequ6ncia a que 6 feita a medida e reduzir substancialmente otempo da medida.
Assim, neste trabalho, estuda-se
um
conjunto de algoritmos num6ricos para aadaptagdo de sinusoides a
um
conjunto de dados adquiridos porum
canal de medida e por dois canais de medida [13-18].Para
um
canal de medida estudam-se os m6todos de adaptagEo de sinus6ides,que consistem na procura dos pardmetros da sinusoide que melhor se adapta, segundo o
crit6rio
dos minimos quadrados, aum
conjunto de dados adquiridos porum
conversorADC.
O
primeiro
m6todo
tem
por
objectivo
determinar
a
amplitude,
a
fase
e
a componente continua de um sinal sinusoidal num s6 passo (sem iterag6es), pressupondoo
conhecimentopr6vio
da frequ6ncia. Este metodo6
tradicionalmente designado porm6todo
de tr6s
parflmetros.O
segundo m6todo aplicadoa
um
canal6 o
metodo deadaptagdo
de
sinusoidesde
quatro
par0metros,onde
uma primeira
estimativa
dafrequdncia
permite
uma
estimativa
inicial da
amplitude,
da
fase
e
da
componentecontinua da sinus6ide.
Ao
contr6rio do m6todo de tr6s par0metros, este m6todo permiteestimar o valor da frequ6ncia
[19],
[20].A
exist6ncia de dois canais de medida para dois sinais sinusoidais,no
caso damedigdo de uma amostra de tens6o e de uma amostra de corrente para a determinagdo
de uma impeddncia,
implica
a determinagdo dos par0metros de duas sinus6ides. Nesteum dos conjuntos de amostras adquiridas nos dois canais de medida (metodo designado
por
m6todode 4+4),
ou
aplicar
o
m6todode
quatro pardmetrosa
um
dos canais demedida e aplicar o m6todo de tr6s parimetros ao outro canal de medida (designando-se
neste caso
por
m6todo de 4+3).No
entanto, estes mdtodos ndo usam as amostras dosdois canais para estimar a frequdncia comum. Para ter em conta esta situagdo
introduz-se
o
m6todo
de
adaptagdode
sinus6idesde
seteparimetros onde
se
estimam
os par0metros de duas sinusoides de igual frequ6ncia, entrando em conta com as amostrasadquiridas nos dois canais de medida.
Os
sete pardmetros s6o: duas amplitudes, duasfases, duas componentes continuas e a frequ6ncia comum aos dois sinais.
As
contribuig6esoriginais
deste trabalho consistem na introdugdo deum
novometodo
paraa
determinagSo das amplitudes, componentes continuase
diferenga defases
entre
dois
sinais
sinusoidais.Este
m6todoaqui
denominadocomo m6todo
deadaptaqdo de elipses dispensa a estimativa da frequCncia [18].
No
Capitulo
II
estudam-seos algoritmos
de
adaptaqdode
sinusoidesde
tr€s,quatro,
4+4,
4+3 e
sete pardmetros. Analisa-seo
desempenho destesalgorifnos
emrelagdo ao nirmero de bits do
ADC,
i
frequ6ncia do sinal e ao ruido aditivo do sinal.No
Capitulo
III
procede-sei
medida
de
impeddncias,pelo
m6todo
doamperimetro
-
voltimetro, melhorada pela utilizagdo de conversores anal6gico digitais e pela aplicagIo de algoritmos de adaptag6o de sinus6ides descritos no CapituloII.
No
Capitulo
IV
apresenta-seum
novo algoritmo,
n6oiterativo,
designado porm6todo
de
adaptagdode
elipses[8],
[20] e
l2ll,
para determinar as amplitudese
adiferenga de fase entre duas sinusoides sem recorrer d estimativa da frequ6ncia.
III.
Procede-se porfim
d comparaqdo entre o desempenho do algoritmo de 7 parimetrose o algoritmo de adaptagdo de elipses.
O Capitulo
VI
inclui
as conclus6es sobre o trabalho desenvolvido e perspectival1l
ReferOncias
Henry P.
Hall,
"How
electronics changed impedancemeasurement',IMTC
2004-Instrumentation and Measurement
Technlogt
Conference,Como,
Ithlia, vol.
1,pp.2-8,
Maio
2004.A.
Serra, "Sistemas deMedida", AEIST
1999.S.
S.
Awad,
N.
Narasimhamurti
e
H.
S
Ward,
"Analysis, design
andimplementation
of
an AC
bridge
for
impedance
measurements",IEEE
Transactions
on
Instrumentation and Measurement,vol.
46,n. 6, pp.
894-899,Dezembro 1994.
l4l
H.
Schollmeyer,"A
digital
AC
bridge as an impedanceto
frequency converter",IEEE
Transactions
on
Instrumentation
and
Measurement,
vol. 34
n.
3, pp. 389-392, Setembro 1985.t5]
L.
Angrisani,
A.
Bacciagalupi
e
A.
Pietrosanto,"A
digital
signal
processinginstrument
for
impedance measurement",IEEE
Transactions on InstrumentationandMeasurement,
vol.45, n.6,
pp. 930-934,Dezembro 1996.t6]
J. Kaczmarek, R. Rybski eD.
Ucisnski,"A
recursive DSP approach to impedance measurements",IMEKO
TC4International
Symposium-
Proceeding, N6poles,Ithlia,
pp. 67l-675,
Setembro 1998.17) W.
a
Yang,
"A
self-balancing
circuit
to
measure
capacitanceand
lossconductance
for
industrial
transducer applications",
IEEE
Transactions
onInstrumentation and Measurement,
vol.
45, n. 6, pp. 955-958, Dezembro 1996.18]
M.
Fonseca da Silva, "Sistema Autom6tico de Medida de Impeddncias", Tese de Doutoramento,Instituto
Superior T6cnico, Outubro de 2002.19]
Agilent
4294A Precision
Impedance Analyzer,
Data
Sheet,
disponivel
em www.agilent. com Janeiro 2003 .[10] L.
Angrisani
e
L.
Ferrigno, "Reducing the uncertainty
in
real-time
impedance measurements", Measurement,vol.
30, n. 4, pp. 307 -31 5, Dezembro 200 I .[11]
Tom65 Radil, PedroM.
Ramos eA.
Cruz. Serra, "DSP based portable impedancemeasurement
instrument
using sine-fitting
algorithms",
IEEE IMTC
2005
-Instrumentation
and
Measurement
Technolog
Conference,Ottawa,
Canadb,vol.
2, pp. I 01 8-l 022,Maio
2005.ll2)
J.
Augustyfl,
"A
comparativeevaluation
of
someLMS-based algorithms
for
calculating
of
impedance components
in
the
sampling
sensor
instrument",l2l
114] M.
Fonseca da Silva, PedroM.
Ramos eA.
Cruz
Serra,"A
newfour
parameter sinefitting
procedure" , Measurement, vol. 3 5, n. 2, pp.I3l-I37
, Margo 2004.[15]
Pedro Ramos,M.
Fonseca da Silva eA.
Cruz
Serra,"Low
frequency impedance measurementusing
sinefiuing",
Measurement,vol.35,
n.
1,pp.
89-96, Janeiro 2004.[16]
PedroM.
Ramos,M.
Fonseca da Silva eA.
Cruz.
Serra,"Improving
sine-fittingalgorithms
for
amplitude
and
phase
measurements",XVII
IMEKO
WorldCongress,
Dubrovnik,
Croilcia, pp. 614-619, Junho 2003.llTl
PedroM.
Ramos eA.
Cruz Serra, "Tailored multi-harmonic signalsfor
impedance measurementswith
waveformfitting
algorithms", IEEEInternational
Conference on Signals, Sytems, Devices-SSD, Sousse, Tunisia,vol.
4, Margo 2005.[18]
Mouhaydine Tlemgani, FernandoM.
Janeiro, PedroM.
Ramos eA.
Cruz
Serra, "Impedance Measurements using Analog toDigital
Converters and EllipseFitting
Signal
Processing
Algorithms".
6'hConference
on
Telecommunications Confte le 2 0 0 7, P eniche. Portugal,Maio
2007 .[9]
J.
Shoukens,R.
Pintelon
e
H.
Van
Hamme,
"The
interpolated Fast
FourierTransform:
A
comparativestudy",
IEEE
Transactionson
Instrumentationand
Measurement,vol.
41, n. 2, pp. 226-232, Abt'rl 1992.l20l
T.
Grandke, "Interpolation algorithmsfor
discrete Fourier transformsof
weightedsignals",
IEEE
Transactions
on
Instrumentation
and
Measurement,
n.
32,pp. 350-355, Junho 1983.
l2ll
FernandoM.
Janeiro, PedroM.
Ramos, Mouhaydine Tlemgani eA.
Cruz
Serra,"Analysis
of
a
non-iterative algorithm
for
the
amplitude and
phase differenceestimation
of two
acquired sinewaves",XVIII IMEKO
World
Congress,Rio
deJaneiro, Brasil, Setembro 2006.
122)
PedroM.
Ramos, FernandoM.
Janeiro, Mouhaydine Tlemgani eA.
Cruz
Serra,"Implementation
of
a DSP
Based lmpedance MeasurementInstrument
Usingellipse
Fitting
Algorithms",
t|th
IMEKO
TC4
Symposiumon
Novelties in
2.1
ll.
M6todo de
adaptagio
de
sinus6ides
Introdu96o
Um
m6todo comum para determinara
respostaem
frequCncia deum
sistemalinear, consiste na variagdo da frequ6ncia de entrada de
um
sinal sinusoidal, medindo arelagdo entre as amplitudes do sinal de entrada e de saida e a diferenga de fase entre os
dois
sinais[1].
Paraa
medida de imped0nciasa
diferentes frequ6ncias,6
necess6riomedir
as
mesmas relagdes.
O
recurso
a
sistemas
de
aquisigdo
baseados em computadores pessoais permite a utilizagdo de algoritmos num6ricos de processamentode sinal que melhoram a exactiddo e a precisdo das medidas. Neste capitulo, estudam-se
um conjunto de algoritmos num6ricos para a adaptagSo de sinus6ides a um conjunto de
dados adquiridos por um canal de medida ou por dois canais de medida [2].
Para
um
canal de medida estudam-se os m6todos de adaptagSo de sinus6ides,que consistem na procura dos parimetros da sinusoide que melhor se adapta, segundo o
crit6rio
dosminimos
quadrados, aum
conjunto de dados adquiridos porum
conversorADC. O
primeiro
m6todo consiste em determinar a amplitude, a fase e a componentecontinua
de
um
sinal
sinusoidal
num s6
passo(ie.,
sem iterag6es), pressupondo oconhecimento
pr6vio da
frequOncia.Este m6todo
6
tradicionalmente designado porm6todo
de tr6s parimetros.
Na
maioria
das aplicagdes,a
frequ6nciado
sinal ndo
econhecida com exactidEo suficiente e tem que ser estimada. Para
tal
pode utilizar-se aFFT
(FaslFourier
Transform).No
entanto, para umamelhor
estimativa da frequ6nciado
sinal, aFFT
requer a amostragem deum
nirmerointeiro
de periodosdo
sinal. ParaO
segundom6todo aplicado
a
um
s6
canal
6 o
metodo
de
adaptagdo de sinus6ides de quatroparimetros,
onde umaprimeira
estimativa da frequCncia permiteuma estimativa
inicial
da amplitude, da fasee
da componente continua da sinus6ide.Ndo
sendolinear
arelagdo entre os parimetrosdo
sinal, 6 efectuada uma linearizagdoatrav6s de
um
desenvolvimento em s6rie deTaylor
e, iterativamente, corrige-se ovalor
da frequ6ncia.
Ao
contr6rio do m6todo de trds pardmetros, este m6todo permite estimaro valor da frequ6ncia.
A
existdncia de dois canais de medida que adquirem dois sinais sinusoidais, paraa
medigSode
imped0ncias-
um
sinal
correspondentei
tensdoaos terminais
daimpeddncia e outro proporcional
i
corrente na impedincia-
implica a determinag[o dos par0metros de duas sinusoides. Neste caso, pode-se aplicaro
m6todo de adaptag6o desinus6ides de quatro par0metros 14] a cada um dos conjuntos de amostras adquiridas nos
dois canais de medida (m6todo designado por m6todo de 4+4), ou aplicar o m6todo de
quatro pardmetros a
um
dos canais de medida e aplicar o m6todo de tr6s par0metros aooutro canal de medida (designando-se neste caso por mdtodo de 4+3).
No
entanto, estesm6todos n6o usam as amostras dos dois canais para estimar a frequ6ncia comum.
No
m6todo de adaptagSo de sinusoides de sete pardmetros
[5]
estimam-se os pardmetros deduas sinusoides de igual frequ6ncia, entrando em conta com as amostras adquiridas nos
dois
canaisde
medida.Os
sete pardmetross6o:
duas amplitudes, duas fases, duascomponentes continuas
e a
frequdncia comum aosdois
sinais.Nas
sec96es seguintes2.2
M6todo de adaptagdo de
sinus6ides
de
tr6s
pardmetros
Nesta secgdo apresenta-se o estudo do metodo de adaptaqIo de sinusoides de trds
par0metros,
como descrito
em
l2l,
aplicado
a um
conjunto
de
amostras adquiridasatrav6s de um conversor anal6gico digital.
Considera-se um sinal sinusoidal descrito por
u(t)=
Dcos(2rf
t+rp)+c,
(1.1)em que
D
e aamlitude da sinusoide,C
ea
componente continua dosinal,
cp 6 afase e"f
6 a frequ6ncia do sinal.O sinal sinusoidal (1.1) pode tamb6m ser escrito sob a forma
u
(t)
= Acos(zr
ft)
+B
sin(2nft)
*
c,
com(r.2)
(1.3)p=r[4*g'
,1
r
,
seA<O.,un-,[-4-l
I
A)
I-
al
tan-]|--
l+I
A)
,
sel>
0(t
4)O
sinal de
entrada,cuja
frequOncia/
6
conhecida,6
digitalizado com
umafrequCncia
de
amostragem
-f"
nos
instantes
t1,...,ty,...,ty,
correspondentesa
nf
amostras
t\,...,
u 1,, ..., uN
qtue constituem o vector(1 s)
u1
uk
u-A
escolha
adequadada
frequ6ncia
de
amostragem"f"
permite evitar
uma amostragem coerente,isto
6 a
repetigdo das amostras aolongo
dos periodosdo
sinaladquirido. Esta
situagio
acontece quandoa
frequ6ncia de amostragem 6um mirltiplo
inteiro da frequCncia do sinal de entrada ou seja
f"
=n.f
,
sendon
um nirmero inteiro.Na Figura 2.1 apresenta-se um exemplo de um sinal adquirido com um intervalo
de
amostragemde
Lt,=lf
f,
-
tt
-
tu-,=
4lps,
amplitude
D
=lY,
frequ6ncia
del000Hz
e uma faseinicial
de 80o.1,5 1 0,5 E o a0 t o F -0,5 -1 -1.5 2 Tempo Inrsl
Figura 2.1
-
Representagio grificade um sinal sinusoidal com uma frequ6ncia delkHz,
resultante de 100 amostras adquiridas com um intervalo de amostragem Ar, = 41ps .
No
algoritmo
de tr6s par0metros, ap6sa
recolhadas
il
amostrasdo
sinal
de entrada, determinam-se os pardmetros2,
A
"
i,
elementos do vector-=[il
LC-]
(1.6)
tr
l.t'
t=l
toL-(r.7)
(1.8)(l.e)
(1.1o) (1.l3)
(1.14)A
relagdo entre a sinus6ide, descrita em (1.8), e os partmetros a estimar e linear. Neste caso, a relagdo (1.8) pode ser escrita sob a forma vectorialfi=Di,
(1.l
r)
a sinusoide ff
fro
=
lcos(2n
f
to)+
nsin(zn
f t)+c
,de modo a minimizar a soma dos quadrados dos residuos
,'"
--irt'.
k=1Os residuos
4
s6o os elementos dovector
r
definidos por rt=ltt -al,,
r
= (u- Di)'
(u-
ni).
Define-se
Dt
comoamatnzpseudoinversade D
pt
=(o'o)-'r'.
em que
amatiz D
6I
cos(zr;
t,)
sin(zrf
t,)
1l,=l
.o'(r:r,)
sin(zrf
t,)
ll=[*r{rrr*)
sin(zrfi)
1].
e.tz)
lt
lcos(zr;
t*)
sin(zrf
t*)
tl
Atendendo a (1.10) e (1.1
l),
o vector dos residuosr
6Este vector e determinado por
i
=Dtu.
O erro quadr6tico 6 dado porEste pardmetro
6 o valor
efrcaz dos residuose
podeexactid5o do m6todo, quando aplicado d estimativa dos
digitalizada por um conversor ideal.
(1.1s)
(1
16)ser
utilizado
como
medida dapardmetros duma sinusoide pura
No
caso em que a frequdncia do sinal 6 desconhecida, utiliza-seo
algoritmo de adaptagSode
sinusoidesde
quatro parimetros.
Este
estima
a
amplitude,
a
fase,
a componente continua e a frequdncia do sinal. Neste casofr(t)= 2"o'(zo
]t)+nsin(zr
?t)+e
.2.3
M6todo de
adaptagio
de
sinus6ides
de
quatro
parametros
(r.
l7)
obt6m-se
De (1.17) constata-se que a relag6o entre a fung6o estimada e a frequdncia n6o 6
linear. Uma abordagem comum neste
tipo
de problemas passa por uma linearizagSo dafungdo
estimadaem
relag6oi
frequ6ncia, atrav6sdo
desenvolvimentoem
s6rie
deTaylor de primeira ordem.
Para uma fungdo u
(f)
, numa vizinhanga defo,
o desenvolvimento em s6rie deTaylor de primeira ordem 6
u
(fo
*
Lf)
= u(f,)
*
of
utl,
^
(1. 1 8)
Aplicando (1.18)
a(1.17)
e efectuando a substituigSoMesmo com a lineaizaqdo, o termo que
multiplica
Lo
continua a depender deA,
B
e aro. Assim n6o 6 possivel desacoplar os termosA,
B,
C
e
L,a
de(1.20). Uma formade
ultrapassar esteproblema
6
o
uso de um
m6todo
iterativo.
Assumindo
que
oscoeficientes
[-,4rsin(aot)+Btcos(a4r)]
seo independentes dasvari6veis
A
e
B
eseparando os coeficientes de cada
variivel,
a iteragEo de ordemI
pode ser escrita como u (t, a4 + A,a)-
A cos(at, t) + B sin(ao t) + C ++l-,ttsin
(ao r) + Br cos ( a4lf
A,at.i{,r
=[cos(r(,-,)t)
sin(ar{,-,)t)
I
-AQr)lrin(r(-')t)+B(',)tcos(rr,rlt;1
.or(6(-')r,)
*in(a(-')r,)
I
-Afr')trsin(6t'')r,) *
g(i-t)y,.or(6(-')4
)"or(6{'')r,)
rir(6('')r,)
|
-At\Lsin(at'')r,)
+B('')t,ror(6t'')r,)
.or(4,'',r,) ,in(ai''lr,;
'1
-,4,-r)1*sin(6('')r,)+B(-')r, cos(6t'-')r,)
(r.20)
,(1.21)
.
(1.22))o
Bo
eo
L6(,
sendo
o
indice
(i)
referentei
iteragSo actuale o indice
(i-t)
referentei
iteragSo anterior.Assim, amatriz
D(') daiteragao(i)
dedimensdo[afr+]
6determinadaporp(;)
-O vector
soluglo
para a iterag5ol,
^ (i)
x.,=
20
B(nCo
L6(') (1.23) 6 determinado porNa
iteragdo
I
os
resultados
20'),
BU:)
e
6t')
da
iteragdo
anterior sio
utilizados para determinar
D(') e
i(').
De
i(')
sdo retiradas as estimativas2('),
B(4,
CQ)e
LbF).A
frequ6ncia angular paru aiteragEo seguinte 6 ajustada por6(.1 =
5(*t)
*
tr5(t) .(r.2s)
O
processoiterativo
acaba quando a correcgso relativa da frequ6ncia angular einferior
a um determinadolimite,
isto 6, quando(1.26)
A
amplitudee a
fase sdo calculadas usando(1.3) e
(l.a).
As
componentes dovector
ff
s6o
calculadas atrav6sda
relagao(1.17).
O
vector dos
residuos
r
decomponentes
4
e o erro quadr6tico efrcaz s6o determinados como em (1.10) e (1.16).2.4
M6todo de adaptagdo de
sinus6ides
de 4+4 parametros
Nos
algoritmos
de
adaptagdode
sinusoidesde tr6s
e
quatro parimetros,
osparimetros
estimadosda
sinusoide s6o
calculadostendo em
conta
o
conjunto
de amostras deum
canal. Numa situag6o em que existam dois canais de medida, como nocaso
da
medigdo
de
uma
imped0ncia,
effi
que
6
preciso
determinar
um
sinalcorrespondente
d tenslo
de uma
impeddnciae um
sinal proporcional
i
corrente daimped0ncia,
6
possivel aplicar individualmented
cada canal de medidao
m6todo dequatro
parimetros.
Sendoo
processo num6ricoiterativo,
apesar de a frequdncia ser amesma,
ao
aplicar
o
m6todo
de 4+4,
estimam-se duas frequdncias diferentes, quecorrespondem a cada canal.
2.5
M6todo de
adaptagio
de
sinus6ides
de 4+3 parametros
No
algoritmo de 4+4 parimetros estima-se uma frequ6ncia para cada canal. Umaforma
de estimar a mesma frequCncia 6 aplicaro
algoritmo de quatro pardmetros a umlart'll
canal e com a frequ6ncia resultante deste m6todo, aplicar o algoritmo de trds par0metros
ao outro
canal.Como
a
incerteza experimentalda
frequ€ncia estimada depende daamplitude
do
sinal, umaforma
de melhorar as estimativas dos pardmetros6
aplicar om6todo de quatro pardmetros ao conjunto de amostras de maior amplitude.
A
frequOnciaresultante
do
m6todode
quatro par0metros6 utilizada no
m6todo de tr6s par0metrosaplicado ao outro canal (de menor amplitude). Desta forma, garante-se que a estimativa
dos pardmetros das sinus6ides 6 feita com a mesma frequ6ncia.
2.6
M6todo de
adaptagio
de
sinus6ides
de
sete parametros
Os m6todos de adaptagSo de sinus6ides de 4+4 e de
4*3,
descritos sucintamentenas
secgdesanteriores,
permitem
a
determinagdodos partmetros
de dois
sinais sinusoidais adquiridos em dois canais de medida.No
entanto,o algoritmo
de4+4
n6otem em conta a restrig6o da exist6ncia de uma frequOncia comum aos dois sinais.
E
oalgoritmo de
4+3
leva em conta s6 os
dados deum
canal-
o
de maior
amplitude-Levando em conta
a
restrigdode uma s6
frequ6nciae
os
dados dosdois
canais de medida, pode-se reduzir o erro sobre a estimativa da frequ6ncia e melhorar a exactiddoda medida. O metodo de adaptagSo de sinus6ides de sete par0metros recorre ds amostras
dos dois canais em conjunto para determinar a frequCncia, comum aos dois sinais, e os
seis
parimetros
restantes (as duas amplitudes, as duas fasese
as duas componentescontinuas).
Considera-se
um
conjunto de amostras ilr,r,...,u1.k,...,ul.N, adquiridas atrav6s doprimeiro
canal
e um conjunto
u2.y,...,u2.p,...,u2.Nde
amostras adquiridas atrav6s doamostra 6 adquirida no instante t
o,o
em
quep
=L,2
6 o nirmero do canal de medida ek
=1,...,N
6 onfmero
da amostral.O
procedimento6
semelhante aoalgoritmo
dos quatro pardmetros.Difere,
noentanto,
na
construgdoda
matriz
D(')
usada na iteragSoi.
Estatem
quereflectir
asamostras
dos dois
canais
de
aquisigdoe a
sua
contribuigio
paraa
estimativa
dacorrec96o da frequ6ncia.
Amatriz
D(') 6 determinada porem que
,r,r
-
[Q,"'
Rl')
o
I
I
o
R!'
Q""'-]'
*
(r(,'-'),tr,r)
s(r('-\,t
r.r)
l
,(r('''),t
0,,)
s(r('-\,t
0.,)
l
*(r(':')
,,o,r)
s(r!')
,to,*)
;
n(lu') ,aa)
,att')
,t o.r)tt(fi)
,aa-\
,r(i-t)
,7 o,r)h(!'l
,BQ') ,ate') ,tr.*)
(r.27)
(1.28)
Q!)
=R?=
(1.2e)
As fungdes
w(at,t)
, g(at,t)
eh(A,B,at,r)
s6o definidas como w(co,t) = cos(arf),g(a,t)
=sin(af),
(1 30)
(1 31)
'
No.^o
de ocorrer saturagSo de amplitude no canal de aquisig5o do ADC, o nimero de amostras podenih (A, B,
a,t)
= -At
sin(at)
+Bt
cos(at) .A
matriz D(') 6 de dimens6o lzN
x7]
e tem pelo menos6N
elementos nulos.O vector composto das amostras adquiridas
u,
tem
2i[
linhasu =
[',,, ut,z
ut,r,r
uz,t
uz,z
ur,*f'
'O vector solugSo,
i('),
6 calculado porq(,) =
(p(,)rr,,,)
(or,f
"1=
[ut,)]t
u,(r.32)
(1.33) (1.34) com1ti) =
[i{,) 4,)
4,)
Latq
4r
Bt,
il,,],
(1.3s)em
que
)['l
,
91'le
i1't
sro
os parametros estimados do canalI
"
4')
,
a\')
"
ij')
raoos
pardmetos
estimados
do
canal
2
todos
na
iterag5o i
.
O
coeficiente
Lat(')corresponde d correcgSo da frequdncia angular comum. O erro quadr6tico 6
IRMS = .
.
(1.36)
O crit6rio
de convergdncia 6 atingido quando a correcgso relativa da frequ6nciaangular 6
inferior
aum
determinadolimite tal
como descrito em (1.26).A
semelhangados metodos de tr6s e quatro pardmetros, o
termo
e.ur" calculado em (1.36) representa a soma dos valores eficazes dos residuos devidos ds diferengas entre os sinais adquiridos2.7
Simulagio
num6rica
Nesta
sec96os6o
apresentadosos
resultadosde
simulag6es num6ricas dosalgoritmos
de
adaptagdode
sinusoides. Analisa-seo
desempenho dos algoritmos emfung5o da frequ6ncia
inicial
e da fase dos sinais e a dependOnciado
desvio padrdo dafase
estimada
em
relagdo
ds
amplitudes
dos sinais.
Os
sinais
considerados s6osinus6ides, sem componentes continuas
e
com uma frequ6nciade
I
kHz.
Salvo outra indicagdo, cada aquisigdo cont6m 122 amostraspor
canal, adquiridas com um intervalo de amostragemde Al,
=41ur
(estes valores correspondema
cinco periodos),por
umADC
ideal de
alcance
*1 V1.
Para simular as
condigdesreais de
um
processo demedidas experimentais desenvolveu-se um programa de simulagSo em ambiente Matlab
que permite considerar todos os par0metros atr6s referidos e simular
a
digitalizagEo dossinais, com
ADCs
de diferentes nirmeros de bits, ondehi
uma presenga permanente deruido. Aos dois sinais 6 somado ruido gaussiano com valor m6dio nulo.
2.7.1
M6todo
de
tr6s
parametros
O
algoritmo
de
adaptagSode
sinus6idesde
tr6s
pardmetros pressupOe oconhecimento
pr6vio da
frequCnciado
sinal de
entrada.A
exist6ncia deum elro
nafrequdncia conduz a
erro
sobre na estimativa dos par0metrosdo sinal e o
resultado 6uma sinus6ide diferente
do
sinal de entrada.Na
Figura2.2
apresenta-se uma situagdoem
quea
sinus6ide6
estimadapelo
m6todo de tr6s pardmetros, usandoa
frequ6nciaexacta
do
sinal
amostrado(l
kHz) e
outraem
quea
frequ6ncia utihzadano
m6tododifere
l0%
da frequCncia do sinal amostrado (900 Hz).1
Estes valores correspondem a uma frequ6ncia de amostragefr
f,
= 24,39kS/s e foram escolhidos para corresponderem aos pardmetros de uma placa de aquisigSo que seni usada nos resultados experimentais.1.5 1 0.5 E o
g0
c a F -0.5 -1a
o 6n n-c p -1.5 2 Terpo lmsl a Tempo lmslFigura 2.2
- i\
esquerda uma sinus6ide estimada pelo m6todo dos 3 parimetros com afrequ6ncia igual
i
frequ6ncia exacta do sinal de entrada. A direita a mesma sinus6ide calculada com uma frequ6ncia de l0o/o superior ao valor da frequOncia do sinal de entrada. As linha em cheio representam o sinal estimado e os pontos as amostras consideradas para o sinal adquirido.Da
Figura
2.2
constata-seuma
diferenga
significativa entre as
sinus6idesdeterminadas pelo m6todo dos tr6s
parimetros
a
partir da frequ6ncia exacta e de umaque difere
llYo
dafrequdncia exacta. O erro quadr6tico 6 uma medida desta diferenga e,por
consequCncia, da exactidEo da medida. Nesta secaao analisa-sea
depend6ncia doerro quadritico em
relagdo ao errona
estimativa da frequCncia de entrada. Avalia-setamb6m este
erro em
fungdo
do
nrimero
das
amostrasadquiridas
e
analisa-se ainflu6ncia do
nfmero
debit
do conversorADC,
bem como do efeito do ruido gaussianoaditivo.
A
Figura 2.3 e a Figura 2.4 apresentam os resultados obtidos para a depend6nciado erro
quadr6ticoem
relag6od
frequdncianormalizada
qoevaria
numa
gama de+
loyo
em relagSoi
frequCncia de entrada,paraum
conversorADC
ideal
(nirmero debits infinito),
semruido
gaussianoe
paraum
conversorADC ideal
com
um
ruido'100
t n^ Phl
't00
t tr. Plol
Figura 2.3
-
Eno quadnitico normalizado ao valor efrcaz do sinal de entrad4 do m6todo deadaptaqeo de sinus6ides de tr6s parAmetros, em fungf,o da frequdncia do sinal de entrada para v6rios nfmsros de amostras e para um conversor ADC ideal. A esquerda para um ruido de valor
efrcaz nulo e d direita para ruido de valor eficaz l0mV.
Da Figura 2.3 veifica-se
que
o
erro
quadreticom6dio
6
minimo
quando afrequ6ncia usada
no
algoritmo
dostr6s parimetros
6 igual
i
frequ6nciado
sinal
deentrada. Para este
valor,
a sinusoide calculada pelo m6todo de adaptaglo de sinusoidesde tr6s par0metros
6 a
quemelhor
se ajusta ds amostras adquiridas.A
medida que afrequ6ncia usada no algoritmo dos tr6s parimetros se afasta da frequ6ncia exacta, o
effo
quadr6tico aumenta.
Na
ausdnciade
ruido e
paraum
conversorideal
esteminimo 6 igual
a
zero(Figura 2.3 d esquerda). Na presenga de ruido aditivo o valor
minimo
do erro quadr6tico6 diferente de zero (em condig6es ideais n6o 6 igual ao
valor
efrcaz do ruido aditivo).Constata-se
que
a
fungSoque
descrevea
depend6nciado erro
quadr6tico da frequ€ncia usada tem v6rios minimos locais.O
aparecimento dos minimos locais pertoda
frequ6ncia exactado
sinal
dependedo
nirmero das amostras.Verifica-se
que, nomesmo intervalo de frequ6ncia,
i
medida que o nirmero das amostras aumenta, aumentatambem
o
nfmero
dos minimos locais. Conclui-se,
assim,que
o
conhecimento dafrequ6ncia
6
determinante parao
desempenhodo
algoritmo.
A
aplicagdo daFFT
aoentanto, quando
o
conjunto
das amostras adquiridasn6o
correspondea um
ntimerointeiro
de periodos, o algoritmo da FFT n5o 6 adequado para a estimativa da frequ6nciadevido
ao
espalhamento espectral.Esta pode ser
determinadacom
mais
exactiddo atrav6s da aplicagdo daIpDFT
ao conjunto das amostras adquiridas[3].
A
utilizagSo daIpDFT
permite uma estimativa da frequ6nciainicial
com uma maior exactidlo.Na
Figura
2.4
apresenta-seo
erro
quadr6tico
em fungio
da
frequ6ncia,calculado para um sinal amostrado por dois ADCs de 12 e 16 bit.
Figura 2.4
-Eno
quadratico normalizado ao valor efrcaz do sinal de entrad4 do mdtodo deadaptaqdo de sinus6ides de tr6s parimetros, em fung5o da frequ6ncia do algoritno para vdrios nirmeros de amostras adquiridas e para um conversor ADC de 12 bit
i
esquerda e 16 biti
direita. Em ambos os casos o ruido aditivo 6 nulo (Ap6s digi'alizaqdo o ruido ndo e nulo porquetem ruido de quantificageo).
Constata-se que
o
erro quadr6tico n6ovaria
significativamentecom
a variagdo100
f/f. P6l
do
nfmero
debit
do conversorADC
entre 12 e 16.Para
o
mesmo conversorADC de
12bit
eaditivo,
constata-se uma variagEono
valor
minimo
frequCncia usada (Figura 2.5).'100
rlr,
p6lvariando
o valor
efrcazdo
ruido't00
r tr^ Plol
100
t ft^ Phl
Figura 2.5
-
Erro quadratico normalizado ao valor efic,azdo sinal de entrada, do m6todo deadaptagSo de sinus6ides de tr€s parimetros, em fungdo da frequ6ncia do algoritmo pam diferentes ntmeros de amostras adquiridas e para um conversor ADC de 12 bit com ruido
aditivo de 10 mV ir esquerda e 0,1 mV
i
direita.2.7.2
M6todo de
quatro
parametros
O
algoritmo de adaptagSo de sinus6ides de quatro pardmetros procura solugdesde
um
sistema de equag6es n6o lineares de modoiterativo.
Nesta secgSo estuda-se o desempenhodo algoritmo em
fungdo da frequOnciainicial,
bem
como em fung6o doruido aditivo do sinal e do nirmero de
bit
do conversor ADC.Dos resultados da Figura 2.4
e
daFigura 2.5 demonstra-se que o erro quadr6ticodo ajuste de uma sinusoide em
funglo
da frequCncia, possui mriltiplos minimos locaisi
volta do minimo absoluto.
A
converg6ncia do processo iterativo para ominimo
absolutodepende
portanto
da
frequ6ncia
inicial.
E
por
isso
fundamental
a
estimativa
dafrequ6ncia
inicial
com elevada exactidSo.Um
algoritmo simples e exacto para estimar a frequ6nciainicial
6 o algoritmo da IpDFT.Como se disse anteriormente,
o algoritmo
de quatro pardmetros 6um
processoiterativo.
A
partir
da estimativainicial
dos quatro pardmetros produz-seo
conjunto deflactor de correcgdo
M,
6
dependente da frequ6nciainicial
e do
nfmero
de
amostras adquiridas.Na
Figura2.6
apresenta-sea
an6lise da correcadoLf
=
L'atf2r
em fungEo dafrequ6ncia
inicial
considerada para astr6s
iterag6es e para 100 amostras do sinal.120 80 40 0 {0 €0 950 1m0 1050 Frequencia inicial [Hzl I 900
Figura 2.6
-
ConecaSo da frequdnciaM
em funq5o da frequ€ncia inicial/
considerando a1" iteragdo do algoritrno de adaptag6o de sinus6ides de quatro par6metros para as tr6s primeiras iterag6es, com 100 amostras adquiridas de um sinal sinusoidal de 1 kHz.
Constata-se
que, para
a
primeira
iterag6o,a
correc96o
Lf
cresceem
valor
absoluto d medida que
a
frequ6nciainicial
se afasta da frequ6ncia exactado sinal
deentrada. Isto 6, quanto mais a frequ6ncia
inicial
se afasta da frequ6ncia exacta, maior 6 a correcgso em valor absoluto a efectuar. Nesta situag6o o algoritmo converge.A
Figura
2.7
apresentaas
correc96esno
casoda
2ue
da
3u iteragdo com_l N
-'1000
Frequoncia inhial [Hzl
Figura 2.7
-
ConecAdo da frequ6nciaM
em fungio da frequ6ncia inicial/
do algoriano deadaptaqea de sinus6ides de quatro par6metros considerando as2' e 3u iterag6es, com 100 amostras adquiridas de um sinal sinusoidal de 1 kHz.
Na Figura 2.7
observa-se quea
correcgdo na 2u iteraq6o6
superior, emvalor
absoluto, d correcgso na terceira iteragdo o que indicia um processo de convergdncia doalgoritmo.
O
factor
de
correcgdoda
frequ6ncia
Lf
dependetamb6m
do
nrimero
deamostras. Efectuou-se o estudo da depend6ncia do factor de correc96o da frequ6ncia em
fungdo da frequ6ncia
inicial
para 500 amostrasdo
sinal.Na
Figura2.8
apresenta-se acomparaqIo entre
Af
e a correcgdo ideal paraatingir
a convergCncia com esse nirmerode
amostras naFigura. 2.6 n6o
se apresentoua
curva id6ntica,j6
quea
curva idealcoincide quase totalmente com
o valor
da correc96o paraa
lu iteragEo,o
que d escala500 400 300 200 _ 100 N I 0 -100 -200 -300 -400 -500 900 950 1000 1050 Frequancia [Hzl
Figura 2.S
-
(A) Correcg5o da frequ6nciaLf
em funqeo da frequ6ncia inicial/
do algoritno deadaptagdo de sinus6ides de quatro pardmetros paraa lu iteragio. (B) ConecaSo ideal para atingir a converg6ncia. Sinal sinusoidal de 1 kHz com 500 amostras adquiridas.
Constata-se
que
a
correcgdoda
frequ6ncia depende fortementeda
estimativainicial
como donfmero
de amostras. Essa depend6ncia reflecte-se, no erro do algoritmopela
presengade mriltiplos
extremoslocais
d volta do minimo
absoluto.Em
alguns casoso
algoritmo gera correc96es da frequOncia que conduzem a situagdes em que osresultados das iteragSes
"caiem"
num minimo local.Conclui-se que a converg6ncia do algoritmo dos 4 parimetros n6o 6 garantida e que, devido a exist6ncia de extremos locais na fungSo de eero, a escolha da frequ6ncia
inicial
e fundamental para a converg6ncia.A
localizagdo dos extremos locais dependedo
nfmero
de amostras.Um
maiornfmero
de amostras aumenta o nitmero de extremoslocais minimos e m6ximos dentro do mesmo intervalo de frequ6ncia.
No
caso especificoilustrado
na
Figura
2.8,
sea
escolhada
frequ6nciainicial cair fora
dos
limites
dointervalo
de +
5Yo (esteslimites
correspondem aos m6ximos locais na Figura2.3)
da frequ6ncia do sinal, o algoritmo n6o converge.quadr6tico
em
relag6o
d
amplitude
estimadapelo
m6todo
de
quatro
par6metros, aplicou-se o algoritmo com uma frequ6nciainicial
estimada pelaIpDFT
e calculou-se oerro
quadr6tico
com
um
sinal
reconstruido
a
partir de uma
amplitude
diferente,mantendo os restantes pardmetros calculados pelo algoritmo. Na Figura 2.9 apresenta-se
a
depend6nciado erro
quadr6tico, normalizado aovalor
efrcaz da amplitude nominal Do emfungio
da variagdo relativa da amplitude imposta(DlDo)xl}O%o
e em queD
6a
amplitude estimadado sinal
de entrada.Na Figura 2.9
Encontram-se representadasduas situag6es correspondentes d
um ruido aditivo nulo
ei
um ruido aditivo
devalor
efrcaz 10mV.
o,12 0,'l 0,08 " 0,06 0.04 100 D/q
P/.1Figura 2.9
-
Eno quadratico normalizado ao valor eficaz da sinus6ide de entrada do algoritmode quatro par€metros em fung5o da amplitude do sinal de entrada com uma fase de l00o para ruido de valor eficaz
l0
mV e sem ruido aditivo.Na
Figura 2.10 apresenta-se a dependCnciado
erro quadr6tico, normalizado aovalor
efrcaz da amplitude em fungdo da fase estimada do sinal de entrada para um ruidoaditivo nulo e um ruido aditivo de
valor
efrcaz 10 mV.0,02
0,14 o,12 0,1 ;008 6 0,05 0,04 0,o2 0
Figura 2.lO
-
Erro quadr6tico normalizado ao valor eficaz da sinus6ide de entrada do algoritnode quatro parimetros em fungdo da fase do sinal de entrada para ruido aditivo de valor eficaz
l0 mV e sem ruido aditivo.
Da
Figura
2.9 e
da Figura 2.10 verifica-se
queo
erro
quadretico aumenta d medida que a amplitude ou a fase se afastam dos seus valores exactos. O erro 6minimo
quando o
valor
da amplitude ou da fase coincide com ovalor
exacto da sinus6ide. Dosresultados apresentados conclui-se que
o valor minimo do
erro quadr6tico depende dovalor eficaz do ruido aditivo como se
verifica
no caso da variagEo da frequ6ncia.A
avaliagSo do desempenho do algoritmo em relagdo d frequOncia passa tamb6mpelo estudo do erro relativo da estimativa da frequ6ncia.
Na
Figura 2.1I
apresenta-se odesvio padrSo relativo da frequOncia estimada em fungSo da amplitude do sinal com 122
amostras adquiridas por um
ADC
idealt.95 100 105 110
,| 0'l d
:
o o,o', 0,m1 0,m01 0,3 0,4 0,5 0,6 0,7 Amplitude D IVIFigura
2.ll-
Desvio padrSo relativo da frequ€ncia estimada em fungdo da amplitude do sinalpara um conversor ADC ideal e para v6rios valores eficazes do ruido aditivo. Os resultados correspondem d 10000 ensaios.
Verifica-se que
o
desvio padrdorelativo
da frequ6ncia decrescei
medida que aamplitude do sinal aumenta e que depende tamb6m do
valor
eficaz do ruido gaussianoaditivo.
Constata-se,como era de
esperar,que
se obt6muma melhor
estimativa dafrequdncia quando o ruido 6 menor.
Analisou-se
a
dependCnciado
desvio padrdo
da
frequ6ncia
em
relag6o aonrimero de
bit
do
conversorADC
e d
amplitudedo sinal
de entrada.Na
Figura
2.12apresentam-se os resultados obtidos no caso de dois ADCs de 12 e 16
bit
com o mesmo nirmero de amostras por aquisigdo que o caso anterior.1 01
L
'o,o'1 0,001 0.0001 I 0.1 E b o,ot 0,001 0,0@1Figura 2.12- Desvio padreo relativo da frequ6ncia em fungio da amplitude do sinal paftI um
conversor ADC de 12 bit A esquerda e 16 bit d direita e para v6rios valores eficazes do ruido aditivo. Os resultados correspondem
i
10000 ensaios.Tal como para o conversor ideal, o desvio padreo relativo da frequ6ncia decresce
i
medida que aumentam as amplitudes das sinus6ides. Para umruido aditivo
del0
mV
n6o se nota qualquer diferenga entre os resultados obtidos com
ADCs de
12e
16 bit.Isto 6
devido ao
ruido
gaussianoaditivo de
l0
mV
sermuito
superiorao
ruido
dequantificagdo do
ADC.
No
caso deum
conversorde
12bit,
o passo de quantificag6o 6de
I
LSB:0,5 mV
e, no caso de um conversor de 16bit, I LSB:0,03 mV.
O ruido de quantificagdo, considerando queo
sinal tem uma distribuigdouniforme
dentro de cadaintervalo de quantificagSor do
ADC
6lLSBf
J-n
[6].
Assim, o ruido de quantificagdodesteconversorde
lzbit6de144
trrVede9
pV
paraoconversorde 16bit.
2.7.3
M6todo de 4+4 parametros
Nesta sec96o estuda-se
o
desempenho do algoritmo de adaptag6o de sinus6idesde 4+4 par0metros.Para determinar as fases e as amplitudes de dois sinais sinusoidais,
aos
dois
conjuntos
de
amostras adquiridaspor dois
canaisde
medida,
aplica-se o0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
Arlplitud€ DM
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
fases, em cada canal, aleatoriamente no
intervalo (*180o,+180o)
com uma fungao dedistribuigdo
de
probabilidadeuniforme. Para
cadaconjunto de
fases geradas, foramcalculadas as diferengas
de
fase, rp,e
a
diferenga de fase estimada0,,
comoo
erro respectivo6*=e,_0,.
O desvio padrdo desse
ero
6 determinado por(1.37)
oe=
#*o,-0,)'
(1 38)Para os restantes par0metros
foi
efectuadoo
mesmo nirmeroM
de testes efoi
tamb6m calculado
o
valor
m6dio
de
cadapartmetro
e
o
respectivodesvio
padrlo.NaFigura
2.13
apresenta-sea
dependdnciado
desvio padrEodo erro
da diferenga defase entre os dois sinais em relagSo
is
amplitudes dos dois sinais (para tr6s valores deD,
com
4
e-
abcissas) paraADCs de
12e
16bit
eum ruido
gaussianoaditivo
devalor
eficaz 0,1mV.
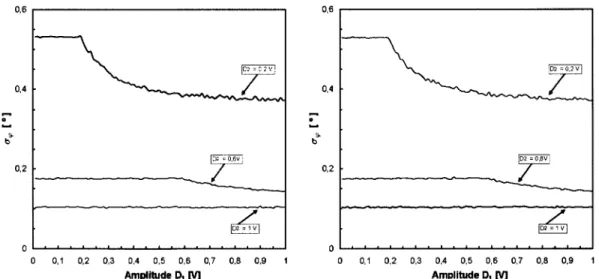
Os testes foram efectuados considerando 122 amostras adquiridasFigura 2.1.3
-
Desvio padr6o do erro da fase em fung5o da amplitude do sinal no segundo canal para um ADC de 12 bit iL esquerda e 16 biti
direita e ruido gaussiano aditivo de 0,I
mV.10
F.
$ b
por canal e por ensaio.
0 0.1 0,2 0,3 0.4 0.5 0,6 0,7 0.8 0,9 1
Amplitude q M
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0.9 1
O
desvio padrao da fasediminui
d medida que a amplitude dos sinais aumenta.Para o mesmo
ruido aditivo
de 0,1mV
obt6m-se uma melhor estimativa da fase usandoum
ADC
de 16bit
em vezde 12bit.
Esta diferenga acentua-se d medida que aumentam as amplitudes dos sinais. Isto 6 devido ao aumento da relagdo sinalruido
e do aumentoda amplitude do sinal em relagSo ao passo de quantificagEo do
ADC.
Ovalor
eficaz doruido aditivo, 0,1
mV,
6
da
mesmaordem
de
grandezaque
o
valor do ruido
dequantificagSo
do
ADC de
lzbit
que6
l441tY
e que 6 consideravelmente superior aoruido de quantificagdo do
ADC
de 16bit,
9pV.
Na
Figura
2.14
apresenta-sea
depend6nciado
desvio
padrlo do
erro
dadiferenga
de
fase entreos dois
sinaisem
relagdo ds amplitudes dosdois
sinais paraADCs de 12 e 16
bit
e ruido gaussiano aditivo de 10 mV.o o, l 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 I 0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
Anplitude q M Amplitude Dr M
Figura 2.14
-
Desvio padrao do erro da fase em fungdo da amplitude do sinal no segundo canalpara um ADC de
l2bit
aesquerda e 16 bit a direita e ruido gaussiano aditivo de 10 mV.Tal
comono
caso anterior, constata-se queo
desvio padr6o da fasediminui
dmedida que a amplitude dos sinais aumenta.
No
entanto, observa-se que, para um ruidoaditivo de
l0
mV,
n6o se nota uma diferenga no desviopadrio
do erro da fase usandoADCs com
12bit
ou
16bit. Isto 6
devido ao
ruido
gaussianode
10mV
sermuito
'10
E
b
2.7.4
Mdtodo de 4+3 parOmetros
Na
Figura 2.T5
e
na
Figuradesempenho
do
algoritmo em
relagdovalor eficaz do ruido aditivo.
o
resultado
do
estudo
do resoluq6odo
conversore
o 0,01 0,008 0,006 0,004 0,002 U0
0'1 o'2" #''*:";Lt'
0'80'e
1
0
0'1 o'2 o't#'"i';";L"'
o'8o'e
1Figura 2,15-Desvio padrdo da fase em fungio da amplitude dos sinais para um ADC de 12 bit
ir esquerda e 16 bit
i
direita e ruido gaussiano aditivo de 0,1 mV.E possivel ver na Figura 2.15 que o desvio padrdo da fase
diminui
d medida quea
amplitudedos
sinais aumenta. Esse decrescimenton6o
6
uniforme,
observando-sepatamares de valores quase constantes, que correspondem
i
situagdo onde a amplitude escolhida para a aplicag5o do m6todo de quatro pardmetros 6 constante e correspondei
amplitude
do
segundocanal
(DrrD,),
i..nos
patamares,o
algoritmo dos
quatroparimetros 6 aplicado ao segundo canal.