CONTROLE
H∞
N ˜
AO LINEAR E A EQUAC
¸ ˜
AO DE
HAMILTON-JACOBI-ISAACS
CONTROLE
H∞
N ˜
AO LINEAR E A EQUAC
¸ ˜
AO DE
HAMILTON-JACOBI-ISAACS
Tese apresentada `a Escola Polit´ecnica da Universidade de S˜ao Paulo para obten¸c˜ao do t´ıtulo de Doutor em Engenharia El´etrica
´
Area de Concentra¸c˜ao: Engenharia de Sistemas
Orientador:
Prof. Dr. Roberto Moura Sales
things; it will improve your theories. If you find that
you’re spending almost all your time on practice,
start turning some attention to theoretical things; it
will improve your practice.
O objetivo desta tese ´e investigar aspectos pr´aticos que facilitem a aplica¸c˜ao da teoria de controle H∞ n˜ao linear em projetos de sistemas de controle. A primeira
contribui¸c˜ao deste trabalho ´e a proposta do uso de fun¸c˜oes pondera¸c˜ao com dinˆamica no projeto de controladores H∞ n˜ao lineares. Essas fun¸c˜oes s˜ao usadas no projeto de
controladoresH∞ lineares para rejei¸c˜ao de perturba¸c˜oes, ru´ıdos, atenua¸c˜ao de erro de
rastreamento, dentre outras especifica¸c˜oes. O maior obst´aculo para aplica¸c˜ao pr´atica da teoria de controle H∞ n˜ao linear ´e a dificuldade para resolver simultaneamente as
duas equa¸c˜oes de Hamilton-Jacobi-Isaacs relacionadas ao problema de realimenta¸c˜ao de estados e inje¸c˜ao da sa´ıda. N˜ao h´a m´etodos sistem´aticos para resolver essas duas equa¸c˜oes diferenciais parciais n˜ao lineares, equivalentes `as equa¸c˜oes de Riccati da te-oria de controle H∞ linear. A segunda contribui¸c˜ao desta tese ´e um m´etodo para
obter a inje¸c˜ao da sa´ıda transformando a equa¸c˜ao de Hamilton-Jacobi-Isaacs em uma seq¨uˆencia de equa¸c˜oes diferenciais parciais lineares, que s˜ao resolvidas usando o m´etodo de Galerkin. Controladores H∞ n˜ao lineares para um sistema de levita¸c˜ao magn´etica
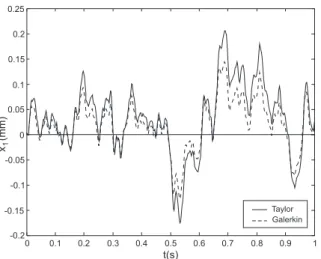
s˜ao obtidos usando o m´etodo cl´assico de expans˜ao em s´erie de Taylor e o m´etodo de proposto para compara¸c˜ao.
Palavras-chave: Controle H∞ n˜ao linear, fun¸c˜oes pondera¸c˜ao, realimenta¸c˜ao da
The purpose of this thesis is to investigate practical aspects to facilitate the ap-plication of nonlinear H∞ theory in control systems design. Firstly, it is shown that
dynamic weighting functions can be used to improve the performance and robustness of the nonlinearH∞controller such as in the design of H∞ controllers for linear plants.
The biggest bottleneck to the practical applications of nonlinear H∞ control theory
has been the difficulty in solving the Hamilton-Jacobi-Isaacs equations associated with the design of a state feedback and an output injection gain. There is no systematic numerical approach for solving this first order, nonlinear partial differential equations, which reduces to Riccati equations in the linear context. In this work, successive ap-proximation and Galerkin apap-proximation methods are combined to derive an algorithm that produces an output injection gain. Design of nonlinear H∞ controllers obtained
by the well established Taylor approximation and by the proposed Galerkin approxi-mation method applied to a magnetic levitation system are presented for comparison purposes.
Keywords: Nonlinear H∞ control, Weighting functions, Output feedback,
2.1 Sistema em malha fechada com fun¸c˜ao pondera¸c˜ao . . . 22
3.1 Proje¸c˜ao de um vetor do R3 noR2 . . . . 34
4.1 Sistema de levita¸c˜ao magn´etica . . . 58
4.2 Sistema em malha fechada com fun¸c˜oes pondera¸c˜ao . . . 61
4.3 Fun¸c˜oes pondera¸c˜ao . . . 62
4.4 Rejei¸c˜ao de ru´ıdo e perturba¸c˜ao do sistema sem e com fun¸c˜oes pondera¸c˜ao 64 4.5 Posi¸c˜ao, velocidade e a¸c˜ao de controle para sistema com inje¸c˜ao da sa´ıda obtida por expans˜ao em s´erie de Taylor e ASG . . . 66
4.6 Rejei¸c˜ao de ru´ıdo para sistema com inje¸c˜ao da sa´ıda obtida por expans˜ao em s´erie de Taylor e ASG . . . 67
4.7 Resposta a uma perturba¸c˜ao do tipo impulso na for¸ca de levita¸c˜ao . . . 68
4.8 Efeito do dom´ınio de estabilidade sobre a resposta . . . 69
η Mapa suave η: Ξ×Rp →Rν . . . 8
γ Ganho L2. . . 9
Al(Ω) Conjunto de leis de controle admiss´ıveis para o problema de controle ´otimo n˜ao linear com fun¸c˜ao penaliza¸c˜ao l e regi˜ao de estabilidade Ω . . . 50
P(Φ,Ω) Conjunto de todas as combina¸c˜oes lineares dos elementos em Φ que convergem ponto a ponto a cada x∈Ω . . . 51
C− Semiplano esquerdo do plano complexo . . . 14
Ω Regi˜ao de estabilidade . . . 30
Φ Conjunto de fun¸c˜oes usadas como base para aproxima¸c˜ao de Galerkin . . . 51
φv Base de fun¸c˜oes para realimenta¸c˜ao de estado . . . 36
φw Base de fun¸c˜oes para realimenta¸c˜ao da sa´ıda . . . 40
σ(M) Conjunto de autovalores da matriz M. . . 14
θ Mapa suave η: Ξ×Rp →Rm. . . 8
Ξ Vizinhan¸ca da origem em Rν. . . 8
ξ Vetor estado estimado em Rν . . . 8
A Matriz Rn×n. . . 13
C1 Matriz Rn×s. . . 13
C2 Matriz Rn×p. . . 20
cv coeficientes da aproxima¸c˜ao de Galerkin para VN. . . 36
cw coeficientes da aproxima¸c˜ao de Galerkin para WN. . . 40
D2 Matriz Rp×r. . . 15
D11 Matriz Rr×s. . . 20
D12 Matriz Rm×s. . . 20
D21 Matriz Rr×p. . . 20
F Mapa suave Rn×Rr×Rm →Rn. . . 8
f Mapa Rn →Rn. . . 13
F(t) For¸ca magn´etica . . . 58
fd For¸ca de perturba¸c˜ao . . . 58
G Inje¸c˜ao da sa´ıda . . . 17
g Acelera¸c˜ao da gravidade . . . 58
g1 Mapa Rn →Rn. . . 13
g2 Mapa Rn →Rn. . . 13
H Fun¸c˜ao Hamiltoniana do estado . . . 10
H∗ Hamiltoniana para w∗ e u∗. . . 11
h1 Mapa Rn →Rs. . . 13
h2 Vetor em Rp. . . 18
K Fun¸c˜ao Hamiltoniana da sa´ıda . . . 14
k Constante do mancal magn´etico . . . 58
k11 Matriz Rr×s. . . 18
k12 Matriz Rm×s. . . 18
k21 Matriz Rr×p. . . 18
L Matriz de realimenta¸c˜ao de estados Rm×n. . . 13
l Fun¸c˜ao penaliza¸c˜ao para controlador ´otimo n˜ao linear . . . 50
m massa do corpo levitado . . . 58
P Solu¸c˜ao da EAR do estado . . . 26
Q Solu¸c˜ao da EAR da sa´ıda . . . 26
s taxa de suprimento . . . 9
u vetor de entrada de controle em Rm. . . 8
u∗ Controle que minimiza a Hamiltoniana H. . . 10
V Fun¸c˜ao armazenamento do estado . . . 9
Va Fun¸c˜ao armazenamento dispon´ıvel . . . 44
VN Aproxima¸c˜ao de ordem N para a fun¸c˜ao armazenamento . . . 34
W Fun¸c˜ao armazenamento da sa´ıda . . . 16
w Vetor de entrada ex´ogena em Rr. . . 8
W(s) Fun¸c˜ao pondera¸c˜ao . . . 22
w∗ Perturba¸c˜ao que maxima a Hamiltoniana H . . . 10
WN Aproxima¸c˜ao de ordem N da fun¸c˜ao armazenamento da sa´ıda . . . 40
w∗∗ Vetor w que maximiza a HamitonianaK. . . 16
x Vetor de estado em Rn. . . 8
Y Mapa suave Rn×Rr →Rp. . . 8
y vetor de sa´ıda em Rp . . . 8
y∗ Vetor y que minimiza a Hamiltoniana K. . . 15
Z Mapa suave Rn×Rm →Rs. . . 8
ASG Aproxima¸c˜ao Sucessiva de Galerkin . . . 4
CTMSP Centro Tecnol´ogico da Marinha em S˜ao Paulo . . . 57
DHJI Desigualdade de Hamilton-Jacobi-Isaacs . . . 12
DOV Dom´ınio de validade . . . 44
EAR Equa¸c˜ao Alg´ebrica de Riccati . . . 1
EDP Equa¸c˜ao Diferencial Parcial . . . 3
EHJB Equa¸c˜ao de Hamilton-Jacobi-Bellman . . . 3
EHJI Equa¸c˜ao de Hamilton-Jacobi-Isaacs . . . 2
EHJIG Equa¸c˜ao de Hamilton-Jacobi-Isaacs Generalizada . . . 4
LMI Desigualdade Matricial Linear. . . 4
1 Introdu¸c˜ao 1
1.1 Revis˜ao bibliogr´afica . . . 1
1.2 Objetivo . . . 4
1.3 Contribui¸c˜oes do trabalho . . . 5
1.4 Estrutura do texto . . . 6
2 Controle H∞ n˜ao linear 7 2.1 Introdu¸c˜ao . . . 7
2.2 Controle H∞ n˜ao linear via realimenta¸c˜ao de estados . . . 9
2.2.1 Realimenta¸c˜ao de estados para sistema n˜ao linear afim . . . 12
2.3 Controle H∞ n˜ao linear via realimenta¸c˜ao da sa´ıda . . . 14
2.3.1 Uma condi¸c˜ao necess´aria . . . 14
2.3.2 Realimenta¸c˜ao da sa´ıda . . . 16
2.3.3 Realimenta¸c˜ao da sa´ıda para sistema n˜ao linear afim . . . 18
2.4 Inclus˜ao de fun¸c˜oes pondera¸c˜ao com dinˆamica no projeto de controle H∞ n˜ao linear . . . 21
2.5 Solu¸c˜ao das EHJI por expans˜ao em s´erie de Taylor . . . 23
2.5.1 Realimenta¸c˜ao de estados . . . 24
3.1 Introdu¸c˜ao . . . 28
3.2 Aproxima¸c˜ao sucessiva . . . 28
3.2.1 Realimenta¸c˜ao de estados . . . 29
3.2.2 Realimenta¸c˜ao da sa´ıda . . . 31
3.3 M´etodo de Galerkin . . . 33
3.3.1 Realimenta¸c˜ao de estados . . . 35
3.3.2 Realimenta¸c˜ao da sa´ıda . . . 39
3.4 Convergˆencia do m´etodo de aproxima¸c˜oes sucessivas . . . 43
3.4.1 Realimenta¸c˜ao de estados . . . 43
3.4.2 Realimenta¸c˜ao da sa´ıda . . . 46
3.5 Convergˆencia do M´etodo de Galerkin . . . 49
3.5.1 Problema de controle ´otimo n˜ao linear . . . 50
3.5.2 Problema de controle H∞ n˜ao linear por realimenta¸c˜ao de estados 53 3.5.3 Problema de controle H∞ n˜ao linear por realimenta¸c˜ao da sa´ıda 54 4 Controle H∞ n˜ao linear de sistema de levita¸c˜ao magn´etica 57 4.1 Introdu¸c˜ao . . . 57
4.2 Modelo n˜ao linear do sistema de levita¸c˜ao magn´etica . . . 57
4.3 Projeto do controlador H∞ n˜ao linear . . . 60
4.3.1 Realimenta¸c˜ao dos estados . . . 60
4.3.2 Realimenta¸c˜ao da sa´ıda . . . 61
4.4 Inclus˜ao de fun¸c˜oes pondera¸c˜ao . . . 61
4.5 Aproxima¸c˜ao sucessiva de Galerkin para a EHJI . . . 64
Introdu¸
c˜
ao
1.1
Revis˜
ao bibliogr´
afica
A norma H∞ desempenha um importante papel no estudo e an´alise da teoria de
controle robusto desde sua formula¸c˜ao original por Zames (1981) empregando m´etodos no dom´ınio da freq¨uˆencia. Solu¸c˜oes no dom´ınio do tempo foram rigorosamente deriva-das por Doyle et al. (1989) para sistemas lineares e est˜ao relacionaderiva-das com a existˆencia de solu¸c˜oes de Equa¸c˜oes Alg´ebricas de Riccati (EAR). Posteriormente o problema de controleH∞foi formulado como um jogo diferencial de duas pessoas e soma zero (Ba¸sar
e Bernhard, 1990).
A contrapartida n˜ao linear da teoria de controleH∞come¸cou a ser desenvolvida a
partir das importantes contribui¸c˜oes de Ball e Helton (1989), Ba¸sar e Bernhard (1990) e van der Schaft (1991). Apesar da norma H∞ ser definida como uma norma para
matrizes de transferˆencia, no dom´ınio do tempo, nada mais ´e que a normaL2 induzida
(da entrada no tempo para sa´ıda no tempo com estado inicial nulo). Van der Schaft (1991) mostrou que a solu¸c˜ao do problema de controleH∞n˜ao linear por realimenta¸c˜ao
de estados pode ser obtida da solu¸c˜ao de um tipo de equa¸c˜ao de Hamilton-Jacobi, a equa¸c˜ao (ou desigualdade) de Hamilton-Jacobi-Isaacs (EHJI), que ´e a vers˜ao n˜ao linear da EAR do problema de controle H∞ para sistemas lineares. Van der Schaft (1992)
mostrou que se o problema de controleH∞para a planta linearizada tem solu¸c˜ao, ent˜ao
O problema de controle H∞ n˜ao linear por realimenta¸c˜ao da sa´ıda foi tratado
por, dentre outros, Isidori e Astolfi (1992), Ball, Helton e Walker (1993), van der Schaft (1993), Isidori (1994), Isidori e Kang (1995) e James e Baras (1995). Em parti-cular, Isidori e Astolfi (1992) apresentam um conjunto de condi¸c˜oes suficientes para a solu¸c˜ao do problema de atenua¸c˜ao local de perturba¸c˜oes no caso de realimenta¸c˜ao da sa´ıda para sistemas modelados por equa¸c˜oes que s˜ao afins tanto no controle quanto na perturba¸c˜ao. Ball, Helton e Walker (1993) apresentam resultados relacionados `a ne-cessidade das condi¸c˜oes propostas por Isidori e Astolfi (1992) e mostram a nene-cessidade da existˆencia de solu¸c˜ao de uma EHJI, que ´e a vers˜ao n˜ao linear da EAR associada com o problema de controle H∞ por realimenta¸c˜ao da sa´ıda para sistemas lineares.
Al´em disso, mostram que as solu¸c˜ao das EHJIs relacionadas aos problemas de rea-limenta¸c˜ao de estado e inje¸c˜ao da sa´ıda obedecem uma condi¸c˜ao de desacoplamento que, novamente, ´e totalmente an´aloga `a condi¸c˜ao de desacoplamento existente entre as solu¸c˜oes das EARs no caso de sistemas lineares. Ball, Helton e Walker (1993) verifi-cam, portanto, um princ´ıpio da separa¸c˜ao na teoria de controleH∞n˜ao linear. Isidori e
Kang (1995) apresentam condi¸c˜oes necess´arias para existˆencia de solu¸c˜ao do problema de realimenta¸c˜ao da sa´ıda para sistemas n˜ao lineares n˜ao necessariamente afins nas entradas.
Devido `as analogias entre a teoria de controle H∞ linear e n˜ao linear, alguns
trabalhos procuram estender resultados existentes do caso linear para o contexto n˜ao linear. Por exemplo, Fromion, Monaco e Normand-Cyrot (2001) mostram como normas incrementais ponderadas podem ser usadas para atingir, em um contexto n˜ao linear, requisitos b´asicos de estabilidade robusta, atenua¸c˜ao de perturba¸c˜ao e comportamento de estado permanente para sistemas lineares com parˆametros variantes, obtendo con-troladores dependentes dos parˆametros (ganho escalonado). A formula¸c˜ao do problema de controleH∞n˜ao linear nesse trabalho, no entanto, ´e diferente da formula¸c˜ao cl´assica
de van der Schaft (1991, 1992) que ´e tratada nessa tese. Su, Anderson e Brinsmead (2002) usam integrador para rejei¸c˜ao de perturba¸c˜ao constante no projeto de contro-ladores H∞ n˜ao lineares. Algo semelhante j´a havia sido proposto para o projeto de
controladoresH∞ lineares.
desenvol-vida, a solu¸c˜ao das EHJIs permanecem como um desafio e ´e o maior obst´aculo para aplica¸c˜ao pr´atica da teoria (Lu e Doyle, 1995; Beard e McLain, 1998; Aliyu, 2003; Abu-Khalaf, Lewis e Huang, 2006a,b). A EHJI ´e uma equa¸c˜ao diferencial parcial (EDP) n˜ao linear de primeira ordem imposs´ıvel de ser resolvida para um caso geral e muito dif´ıcil ser resolvida para sistemas n˜ao lineares espec´ıficos. Como essa equa¸c˜ao ´e muito dif´ıcil de ser resolvida analiticamente, v´arios m´etodos num´ericos sistem´aticos tem sido propostos para resolvˆe-la.
A expans˜ao em s´erie de Taylor foi o primeiro m´etodo usado para aproximar as solu¸c˜oes da EHJI e ´e o mais usado para objetivos pr´aticos. Esse m´etodo foi primeiro aplicado para a solu¸c˜ao da equa¸c˜ao de Hamilton-Jacobi-Belman (EHJB) proveniente do problema de controle ´otimo n˜ao linear (Lukes, 1969). Van der Schaft (1992) foi o primeiro a propor a expans˜ao em s´erie de Taylor para solu¸c˜ao da EHJI. Alguns traba-lhos apresentam a solu¸c˜ao aproximada por s´erie de Taylor de sistemas como avi˜oes de combate (Kang, De e Isidori, 1992), manipuladores rob´oticos (Yazdanpanah, Khora-sani e Patel, 1998) e levitador magn´etico (Sinha e Pechev, 2004). Huang e Lin (1995) prop˜oem um procedimento sistem´atico para encontrar a aproxima¸c˜ao por s´erie de Tay-lor da solu¸c˜ao da EHJI para realimenta¸c˜ao de estados. A dificuldade em resolver o problema aumenta conforme aumenta a ordem do termo da aproxima¸c˜ao e ´e dif´ıcil garantir estabilidade para um n´umero finito de termos da s´erie. Apesar de estudarem a regi˜ao de estabilidade da realimenta¸c˜ao de estados obtida por aproxima¸c˜ao por s´erie de Taylor, n˜ao ´e poss´ıvel determin´a-la a prio
A regi˜ao de estabilidade da lei de controle aproximada ´e limitada pela regi˜ao de convergˆencia da s´erie de Taylor e ´e melhor estudada em Yazdanpanah, Khorasani e Patel (1999). Esta regi˜ao ´e imposs´ıvel determinar a priori. (Beard e McLain, 1998).
Esse procedimento leva a um sistema de equa¸c˜oes diferenciais parciais que podem ser resolvidas pelo m´etodo das caracter´ısticas. Lu e Doyle (1995) e Patpong et al. (1996) analisam a possibilidade de caracterizar o problema de controle H∞ n˜ao linear como
um problema convexo e apresentam solu¸c˜oes em termos de desigualdades matriciais n˜ao lineares (NLMIs), que s˜ao desigualdades matriciais lineares (LMIs) dependentes do estado. Contudo, n˜ao h´a garantia de existˆencia de solu¸c˜oes atrav´es desse m´etodo.
Beard e McLain (1998) combinam o m´etodo de aproxima¸c˜oes sucessivas e o m´etodo de aproxima¸c˜ao de Galerkin para obter um algoritmo que produz realimenta¸c˜oes de estado estabilizantes com regi˜oes de estabilidade bem conhecidas. Enquanto o m´etodo de aproxima¸c˜oes sucessivas reduz a EHJI em uma seq¨uˆencia de EDPs lineares, chamadas Equa¸c˜oes de Hamilton-Jacobi-Isaacs Generalizadas (EHJIG), o m´etodo de Galerkin ´e usado para aproxim´a-las. Esse m´etodo ser´a chamado, assim como em (Be-ard e McLain, 1998), Aproxima¸c˜ao Sucessiva de Galerkin (ASG). Apesar desse m´etodo exigir o c´alculo de integrais cujo n´umero cresce exponencialmente com a ordem do sistema, a estrutura do algoritmo proposto diminui significativamente a quantidade de c´alculos. O m´etodo de Galerkin assume que a solu¸c˜ao da EHJIG pode ser expressa como uma soma infinita de fun¸c˜oes base. A escolha dessa base n˜ao ´e trivial e exige conhecimento do sistema onde o m´etodo ser´a aplicado. No entanto, uma boa escolha da base pode fornecer controladores com boa performance. Abu-Khalaf, Lewis e Hu-ang (2006a) combinam o m´etodo de aproxima¸c˜oes sucessivas com redes neurais para obter a realimenta¸c˜ao de estados para o problema de controle ´otimo e controleH∞n˜ao
lineares.
1.2
Objetivo
O objetivo deste estudo ´e investigar aspectos pr´aticos que facilitem a aplica¸c˜ao da teoria de controleH∞ n˜ao linear em projetos de sistemas de controle. Tal necessidade
1.3
Contribui¸
c˜
oes do trabalho
A primeira contribui¸c˜ao desta tese ´e mostrar que fun¸c˜oes pondera¸c˜ao, assim como no contexto do controleH∞ linear, podem ser usadas para melhorar a performance do
controlador H∞ n˜ao linear. Se o problema de controle H∞ linear incluindo fun¸c˜oes
pondera¸c˜ao na planta ´e sol´uvel, ´e poss´ıvel mostrar que o problema de controleH∞n˜ao
linear para a planta n˜ao linear incluindo as fun¸c˜oes pondera¸c˜ao usadas no projeto linear tamb´em ´e sol´uvel.
A segunda contribui¸c˜ao desta tese ´e estender o m´etodo de aproxima¸c˜ao suces-siva de Galerkin para resolver de um modo sistem´atico o problema de realimenta¸c˜ao da sa´ıda. De todos os m´etodos anteriormente citados para resolver a EHJI, apenas o m´etodo de aproxima¸c˜ao por s´erie de Taylor tem sido aplicado no problema de re-alimenta¸c˜ao da sa´ıda e n˜ao h´a um procedimento sistem´atico como no caso da reali-menta¸c˜ao de estados (Huang e Lin, 1995), o que dificulta a implereali-menta¸c˜ao computa-cional do m´etodo. Abu-Khalaf, Lewis e Huang (2006b) provaram a convergˆencia do m´etodo de aproxima¸c˜oes sucessivas para aproximar a solu¸c˜ao da EHIJ e Beard, Sari-dis e Wen (1997) provaram a convergˆencia do m´etodo de Galerkin para a solu¸c˜ao da EHJB do problema de controle ´otimo n˜ao linear via realimenta¸c˜ao de estados. Nesta tese ser´a provada a convergˆencia do m´etodo de aproxima¸c˜oes sucessivas para a EHIJ do problema de realimenta¸c˜ao da sa´ıda e ser´a provada a convergˆencia do m´etodo de Galerkin para aproxima¸c˜ao da solu¸c˜ao da EHIJ dos problemas de controle H∞ n˜ao
linear via realimenta¸c˜ao de estado e de sa´ıda.
1.4
Estrutura do texto
Este trabalho est´a organizado da seguinte forma.
No cap´ıtulo 2 s˜ao apresentados os principais resultados da teoria de controle H∞ n˜ao linear. ´E mostrado que fun¸c˜oes pondera¸c˜ao podem ser usadas no projeto de
controladores H∞ n˜ao lineares, assim como ´e feito no contexto linear. Finalmente ´e
mostrado o m´etodo cl´assico de solu¸c˜ao das EHJIs, a expans˜ao em s´erie de Taylor.
No cap´ıtulo 3 ´e apresentado o m´etodo de aproxima¸c˜ao sucessiva de Galerkin para realimenta¸c˜ao de estados proposto por Beard e McLain (1998). ´E desenvolvido um procedimento para solu¸c˜ao da EHJI associada ao problema de realimenta¸c˜ao da sa´ıda usando o m´etodo de aproxima¸c˜ao sucessiva de Galerkin. A convergˆencia do algoritmo proposto ´e provada.
No cap´ıtulo 4 os resultados obtidos nesta tese s˜ao aplicados a um sistema de levita¸c˜ao magn´etica. Primeiramente ´e mostrada a vantagem do uso de fun¸c˜oes pon-dera¸c˜ao no projeto do controladorH∞ n˜ao linear. Depois as EHJIs referentes aos
pro-blemas de realimenta¸c˜ao de estados e de realimenta¸c˜ao da sa´ıda s˜ao resolvidas usando o algoritmo de aproxima¸c˜ao sucessiva de Galerkin, desenvolvido no cap´ıtulo 3.
Controle
H
∞
n˜
ao linear
2.1
Introdu¸
c˜
ao
O controle H∞ n˜ao linear resulta da teoria da dissipatividade para sistemas n˜ao
lineares e da teoria de controle H∞ linear. Esta conex˜ao entre a teoria da
dissipa-tividade, que foi desenvolvida no come¸co da d´ecada de 1970, e a teoria de controle H∞ linear, apareceu no final da d´ecada de 1980 e atingiu algum n´ıvel de maturidade
no in´ıcio da d´ecada de 1990. Neste cap´ıtulo s˜ao apresentados os resultados mais im-portantes da teoria de controleH∞ n˜ao linear.
Os resultados da teoria de controle H∞ n˜ao linear usados neste trabalho foram
propostos por van der Schaft (1991, 1992) para realimenta¸c˜ao de estados e por Isidori e Astolfi (1992) e Isidori e Kang (1995) para realimenta¸c˜ao da sa´ıda. Inicialmente ser˜ao mostrados resultados para sistemas n˜ao lineares em uma forma mais geral, como em Isidori e Kang (1995) e depois para sistemas n˜ao lineares afins, como em van der Schaft (1991, 1992) e Isidori e Astolfi (1992).
Considere um sistema n˜ao linear modelado pelas equa¸c˜oes na forma
˙
x=F(x, w, u), z =Z(x, u), y=Y(x, w).
(2.1)
uma vizinhan¸ca X da origem em Rn com entrada de controle u ∈ Rm e sujeita a um
conjunto de entradas ex´ogenas w ∈ Rr que inclui perturba¸c˜oes (a serem rejeitadas) e/ou referˆencias (a serem rastreadas). Admite-se que s≥m.
A segunda equa¸c˜ao define uma vari´avel penalidade z ∈ Rs, que pode incluir
um erro de rastreamento assim como um custo da entrada u necess´aria para atingir o objetivo do sistema de controle.
A terceira equa¸c˜ao define um conjunto devari´aveis medidas y∈Rp, que tamb´em
s˜ao fun¸c˜oes do estado da planta xe da entrada ex´ogena w. Admite-se que p≤r.
Os mapeamentos F(x, w, u), Z(x, u) e Y(x, w) s˜ao mapeamentos suaves (isto ´e, mapeamentos de classe Ck para algum k suficientemente grande) definidos em uma
vizinhan¸ca da origem em Rn ×Rr × Rm. ´E assumido tamb´em que F(0,0,0) = 0,
Z(0,0) = 0 e Y(0,0) = 0.
A lei de controle para (2.1) ser´a provida por um controlador, que processa a vari´avel medida y, gera uma entrada de controle apropriada u, e ´e modelado por equa¸c˜oes na forma
˙
ξ=η(ξ, y),
u=θ(ξ, y), (2.2)
onde ξ ´e definida em uma vizinhan¸ca Ξ da origem em Rν e η : Ξ× Rp → Rν e θ: Ξ×Rp →Rm s˜ao fun¸c˜oes suaves, satisfazendo η(0,0) = 0 eθ(0,0) = 0.
O objetivo do controle ´e duplo: alcan¸car a estabilidade em malha fechada e atenuar a influˆencia da entrada ex´ogenawna vari´avel penalidadez. A propriedade de atenua¸c˜ao de perturba¸c˜ao em um sistema n˜ao linear pode ser caracterizada da seguinte forma (Willems, 1972; van der Schaft, 1992; Ball, Helton e Walker, 1993). Um sistema n˜ao linear
˙
x=f(x, u),
y=h(x), (2.3)
´e localmente dissipativo perto de (x, u) = (0,0), com respeito `a uma dada taxa de
n˜ao negativa exceto em x= 0, tal que
∂V
∂xf(x, u)−s(u, h(x))≤0,
para todo (x, u) em uma vizinhan¸ca de (0,0).
Se (2.3) for localmente assintoticamente est´avel (na origem) e localmente dissi-pativa com respeito `a taxa de suprimentos(u, y) =γ2kuk2− kyk2, ent˜ao sua sa´ıda para
qualquer entrada suficientemente pequena, a partir do estado inicialx(0) = 0, satisfaz
0≤V(x(t))≤
Z t
0
(γ2ku(s)k2− ky(s)k2)ds,
para todot >0. Como conseq¨uˆencia, (2.3) tem ganho L2 menor ou igual aγ.
A seguir, ser´a tratado o problema de encontrar um controlador que proporcione um sistema em malha fechada (2.1) – (2.2) localmente assintoticamente est´avel e lo-calmente dissipativo com respeito `a taxa de suprimentos(w, z) =γ2kwk2− kzk2. Esse
problema ser´a chamado de problema de controle H∞ n˜ao linear. Primeiro ser´a
anali-sada a situa¸c˜ao em que todos os estados est˜ao dispon´ıveis para realimenta¸c˜ao. Depois ser´a analisado o caso de realimenta¸c˜ao da sa´ıda.
2.2
Controle
H
∞n˜
ao linear via realimenta¸
c˜
ao de
estados
Como apontado por v´arios autores (veja, por exemplo, Ball, Helton e Walker (1993) e Ba¸sar e Bernhard (1990)), o problema de encontrar uma lei de controle da forma u=α(x) gerando um sistema em malha fechada
˙
x=F(x, w, α(x)),
z =Z(x, α(x)), (2.4)
localmente dissipativo com respeito `a taxa de suprimentos(w, z) =γ2kwk2−kzk2, pode
norma da entrada de u e maximizada norma da entradaw.
A fun¸c˜ao Hamiltoniana associada com o jogo em quest˜ao ´e uma fun¸c˜ao H : Rn×Rn×Rr×Rm →Rdefinida como
H(x, p, w, u) =pTF(x, w, u) +kZ(x, u)k2 −γ2kwk2. (2.5)
Suponha que a planta (2.1) satisfa¸ca `a seguinte hip´otese.
Hip´otese 2.1. O mapa penalidade Z(x, u) ´e tal que a matriz
D1 =
∂Z ∂u(0,0)
tem postom.
Ent˜ao ´e f´acil ver que em uma vizinhan¸ca do ponto (x, p, w, u) = (0,0,0,0), a fun¸c˜ao H(x, p, u, w) tem ponto de sela local ´unico em (w, u) para cada (x, p). Mais precisamente, existem fun¸c˜oes suaves w∗(x, p) e u∗(x, p) ´unicas, definidas em uma
vi-zinhan¸ca de (0,0), satisfazendo
∂H
∂w(x, p, w∗(x, p), u∗(x, p)) = 0, ∂H
∂u(x, p, w∗(x, p), u∗(x, p)) = 0,
w∗(0,0) = 0,
u∗(0,0) = 0,
e tais que
H(x, p, w, u∗(x, p))≤H(x, p, w∗(x, p), u∗(x, p))≤H(x, p, w∗(x, p), u) (2.6)
−2γ2I 0
0 2DT
1D1
,
onde DT
1D1 ´e positiva definida por hip´otese (D1 tem postom).
Seja agora V : Rn → R uma fun¸c˜ao suave, definida em uma vizinhan¸ca U de
x= 0 e tal queV(0) = 0 e Vx(0) = 0, defina
H∗(x, p) = H(x, p, w∗(x, p), u∗(x, p)),
α1 =w∗(x, VxT(x)),
α2 =u∗(x, VxT(x)),
(2.7)
e observe que (2.6), em particular, implica
H(x, VxT(x), w, α2(x))≤H∗(x, VxT(x)).
Agora, suponha que a fun¸c˜aoV(x) ´e n˜ao negativa (casoV(0) = 0, tem-seVx(0) =
0) e considere a desigualdade
H∗(x, VxT(x))≤0 (2.8)
satisfeita para todox em uma vizinhan¸ca de zero. Ent˜ao fa¸ca α(x) =α2(x) em (2.4).
Isto faz o sistema em malha fechada satisfazer
Vx(x)F(x, w, α2(x)) +kZ(x, α2(x))k2−γ2kwk2 ≤0,
que ´e um sistema que, em uma vizinhan¸ca de (x, w) = (0,0), tem a propriedade de dissipatividade satisfeita.
A desigualdade (2.8) ´e chamada desigualdade de Hamilton-Jacobi-Isaacs (DHJI). SeV(x) ´e positiva definida e uma hip´otese adicional apropriada ´e satisfeita, pode ser provado que a lei de controleu=α2(x) ´e tamb´em localmente assintoticamente
Hip´otese 2.2. Qualquer trajet´oria limitadax(t) do sistema
˙
x(t) = F(x(t),0, u(t))
satisfazendo
Z(x(t), u(t)) = 0
para todot >0, ´e tal que lim
t→0x(t) = 0.
Proposi¸c˜ao 2.1 (Isidori e Kang (1995)). Considere que o sistema (2.1) e as hip´oteses 2.1 e 2.2 sejam satisfeitas. Suponha que exista uma fun¸c˜ao suave positiva definida V(x), localmente definida em uma vizinhan¸ca dex= 0 e tal que V(0) = 0, que satisfaz a DHJI (2.8). Ent˜ao a lei de controleu=α2(x) resolve o problema de atenua¸c˜ao local
de perturba¸c˜ao com estabilidade interna.
Observa¸c˜ao 2.1. Apesar de haver interesse em solu¸c˜oes n˜ao negativas de (2.8), o pro-blema ser´a restrito a encontrar solu¸c˜oes da equa¸c˜ao de Hamilton-Jacobi-Isaacs (EHJI):
H∗(x, VxT(x)) = 0, V(0) = 0, Vx(0) = 0.
Note que a condi¸c˜ao extraVx(0) = 0 ´e automaticamente satisfeita seV ´e n˜ao negativa.
2.2.1
Realimenta¸
c˜
ao de estados para sistema n˜
ao linear afim
Considere um sistema n˜ao linear na seguinte forma
˙
x=f(x) +g1(x)w+g2(x)u,
z =
h1(x)
u
,
(2.9)
onde x∈ Rn, u∈ Rm, w∈ Rr, z ∈Rs, f(0) = 0 e h
1(0) = 0. A solu¸c˜ao do problema
Teorema 2.1 (van der Schaft (1992)). Considere o sistema n˜ao linear dado por (2.9) com γ >0. Suponha que exista uma solu¸c˜ao suave V(x)≥0 para a DHJI
∂V(x)
∂x f(x) + 1 2
∂V(x) ∂x
·
1
γ2g1(x)g
T
1(x)−g2(x)g2T(x)
¸
∂VT(x)
∂x +
1 2h
T
1(x)h1(x)≤0,
(2.10)
com V(0) = 0. Ent˜ao a realimenta¸c˜ao de estados
u=−gT
2(x)
∂VT(x)
∂x (2.11)
tem ganhoL2 menor ou igual a γ.
Teorema 2.2 (van der Schaft (1992, 1993)). Considere o sistema (2.9) linearizado
˙¯
x=Ax¯+B1w¯+B2u,¯
¯ z =
C1x¯
¯ u
,
onde ¯x ∈ Rn, ¯u ∈ Rm, ¯w ∈ Rr, ¯z ∈Rs, A = ∂f(x)/∂x|
x=0, B1 =g1(0), B2 = g2(0) e
C1 =∂h(x)/∂x|x=0.
Assuma que (A, C1) seja detect´avel. As seguintes afirma¸c˜oes s˜ao equivalentes
i) Existe uma realimenta¸c˜ao linear de estados
¯ u=L¯x
tal que o sistema em malha fechada ´e assintoticamente est´avel e tem ganho L2 <
γ (isto ´e, o problema de controle H∞ linear via realimenta¸c˜ao de estados tem
solu¸c˜ao).
ii) Existe uma solu¸c˜ao sim´etrica X =XT ≥0 para a Equa¸c˜ao alg´ebrica de Riccati
(EAR)
ATX+XA+X µ
1 γ2B1B
T
1 −B2B2T
¶
X+CT
satisfazendo tamb´em
σ
µ
A−B2B2TX+
1 γ2B1B
T
1X
¶
X ⊂C−,
onde σ(M) representa o conjunto de autovalores da matrizM eC− corresponde
ao semiplano esquerdo do plano complexo.
iii) Existe uma vizinhan¸ca W ⊂ M da origem e uma realimenta¸c˜ao n˜ao linear de estados
u=α(x), α(0) = 0,
definida em W, tal que A +B2L, com L = ∂α(x)/∂x|x=0 ´e assintoticamente
est´avel e o sistema (2.9) em malha fechada tem, localmente em W, ganhoL2 < γ
(isto ´e, o problema de controle H∞ n˜ao linear via realimenta¸c˜ao de estados ´e
sol´uvel em W).
2.3
Controle
H
∞n˜
ao linear via realimenta¸
c˜
ao da
sa´ıda
Se somente a sa´ıda y estiver dispon´ıvel para realimenta¸c˜ao, o estado pode ser estimado por um observador. Nesta se¸c˜ao, ser˜ao apresentadas as condi¸c˜oes que devem ser satisfeitas para que a planta com o controlador baseado em observador tenha ganho L2 ≤0.
2.3.1
Uma condi¸
c˜
ao necess´
aria
Considere a fun¸c˜ao Hamiltoniana K :Rn×Rn×Rr×Rp →R definida como
K(x, p, w, y) =pTF(x, w,0)−yTY(x, w) +kZ(x,0)k2−γ2kwk2 (2.12)
Hip´otese 2.3. O mapeamento Y(x, w) ´e tal que a matriz
D2 =
∂Y ∂w(0,0)
tem postop.
Como
µ
∂2K(x, p, w, y)
∂w2
¶
(x,p,w,y)=(0,0,0,0)
=−2γ2I,
existe uma fun¸c˜ao suave ˆw(x, p, y), definida em uma vizinhan¸ca de (0,0,0) tal que
µ
∂K(x, p, w, y) ∂w
¶
w= ˆw(x,p,y)
= 0, w(0,ˆ 0,0) = 0.
Al´em disso, ´e f´acil verificar que
µ
∂2K(x, p,w(x, p, y), y)ˆ
∂y2
¶
(x,p,y)=(0,0,0)
= 1 2γ2D2D
T
2.
Assim, existe uma fun¸c˜ao suave y∗(x, p), definida em uma vizinhan¸ca de (0,0) tal que
µ
∂K(x, p,w(x, p, y), y)ˆ ∂y
¶
y=y∗(x,p)
= 0, y∗(0,0) = 0.
Por constru¸c˜ao,
K(x, p, w, y)≤K(x, p,w(x, p, y), y)ˆ
para todo (x, p, w, y) em uma vizinhan¸ca (0,0,0,0) e
K(x, p,w(x, p, y), yˆ )≤K(x, p,w(x, p, yˆ ∗(x, p)), y∗(x, p))
para todo (x, p, y) em uma vizinhan¸ca de (0,0,0).
w∗∗(x, p) = ˆw(x, p, y∗(x, p)).
As fun¸c˜oes w∗∗(x, p) e y∗(x, p) assim definidas podem ser usadas para
expres-sar uma condi¸c˜ao necess´aria para o problema de atenua¸c˜ao de perturba¸c˜ao via reali-menta¸c˜ao da sa´ıda.
Teorema 2.3 (Isidori e Kang (1995)). Considere o sistema (2.1) e suponha que a hip´otese 2.3 seja satisfeita. Suponha que o problema de atenua¸c˜ao local de perturba¸c˜ao seja resolvido por uma lei de controle
˙
ξ =η(ξ, y), u=θ(ξ),
e sejaU(x, ξ) uma fun¸c˜ao suave definida positiva satisfazendo
[ Ux(x, ξ) Uξ(x, ξ) ]
F(x, w, θ(ξ)) η(ξ, Y(x, w))
+kZ(x, θ(ξ))k2−γ2kwk2 ≤0
para todo (x, ξ, w) em uma vizinhan¸ca de (0,0,0). Assim, a fun¸c˜ao positiva definida W(x) = U(x,0) satisfaz
K(x, WT
x (x), w∗∗(x, WxT(x)), y∗(x, WxT(x))) ≤0
para todox na vizinhan¸ca de zero.
2.3.2
Realimenta¸
c˜
ao da sa´ıda
Teorema 2.4 (Isidori e Kang (1995)). Considere o sistema (2.1) e suponha que
i) As hip´oteses 2.1, 2.2 e 2.3 forem satisfeitas,
iii) A desigualdade
K(x, WxT(x), w∗∗(x, WxT(x)), y∗(x, WxT(x)))−H∗(x, VxT(x))<0
tiver solu¸c˜ao suave W(x) >0, definida em uma vizinhan¸ca de x = 0, W(0) = 0 e positiva para x6= 0,
iv) W(x)−V(x)>0 para todo x6= 0,
v) A matriz Hessiana de
K(x, WT
x (x), w∗∗(x, WxT(x)), y∗(x, WxT(x)))−H∗(x, VxT(x))
for n˜ao singular em x= 0 e a equa¸c˜ao
(Wx(x)−Vx(x))G(x) = y∗T(x, W
T
x(x)) (2.13)
tiver uma solu¸c˜ao suave G(x),
ent˜ao o problema de atenua¸c˜ao local de perturba¸c˜ao com estabilidade interna ´e resol-vido pela realimenta¸c˜ao da sa´ıda
˙
ξ=F(ξ, α1(ξ), α2(ξ))−G(ξ)(y−Y(ξ, α1(ξ))),
u=α2(ξ),
onde α1(x),α2(x) e G(x) s˜ao escolhidos como em (2.7) e (2.13).
Observa¸c˜ao 2.2. Como apontado por Isidori e Kang (1995), o ganho do observador G(x) que ´e definido implicitamente em (2.13) pode ser calculado extraindo-se xT de
Wx(x)−Vx(x) e deyT∗(x, W
T x(x)):
G(x) = L−1(x)R 1(x),
Wx(x)−Vx(x) = xTL(x),
yT
∗(x, W
T
x(x)) =xTR1(x).
Observa¸c˜ao 2.3. Os sinaisw∗∗(x, WxT(x)) ey∗(x, WxT(x)) podem ser interpretados da
seguinte forma. Como visto na se¸c˜ao 2.3.1, w∗∗ maximiza a Hamiltoniana K enquanto
y∗ a minimiza. A interpreta¸c˜ao, portanto, ´e similar para o caso de realimenta¸c˜ao de
estado: w∗∗´e o pior caso da entrada ex´ogena que tenta aumentar a norma da vari´avel
controladaz. O sinal de controle n˜ao ´e mais u mas y∗, que estabiliza a planta e reduz
a influˆencia de w em z pela inje¸c˜ao da sa´ıda.
2.3.3
Realimenta¸
c˜
ao da sa´ıda para sistema n˜
ao linear afim
´
E assumido que o sistema n˜ao linear esteja na seguinte forma afim
˙
x=f(x) +g1(x)w+g2(x)u,
z =h1(x) +k11w+k12u,
y =h2(x) +k21(x)w,
(2.14)
onde x∈Rn,u∈Rm, w∈Rr,z ∈Rs ey ∈Rp.
Primeiramente ´e necess´ario apresentar a no¸c˜ao de detectatibilidade.
Defini¸c˜ao 2.1. Suponha f(0) = 0 e h1(0). O par (f, h1) ´e localmente detect´avel se
existir uma vizinhan¸caU do pontox= 0 tal que, sex(t) for qualquer curva integral de ˙
x=f(x) satisfazendox(0) ∈U, ent˜aoh1(x(t)) ´e definida para todot≥0 eh1(x(t)) = 0
para todot≥0 implica lim
t→0x(t) = 0.
O seguinte teorema apresenta a solu¸c˜ao do problema de realimenta¸c˜ao da sa´ıda para um sistema afim.
Teorema 2.5 (Isidori e Astolfi (1992)). Para o sistema dado por (2.14), suponha que
H1) O par (f, h1) ´e localmente detect´avel,
Vxf(x) +hT1(x)h1(x) +γ2αT1(x)α1−αT2(x)α2 = 0, (2.15)
onde
α1(x) = 2γ12g1T(x)VxT(x),
α2(x) =−12gT2(x)VxT(x),
H3) Exista uma matriz G, n×p, tal que o equil´ıbrio ξ = 0 do sistema
˙
ξ =f(ξ) +g1(ξ)α1(ξ)−Gh2(ξ)
´e localmente assintoticamente est´avel,
H4) Exista uma fun¸c˜ao suave semidefinida positiva W(x, ξ), localmente definida em uma vizinhan¸ca da origem de Rn×Rn e tal queW(0, ξ)>0 para todoξ6= 0 que
resolve a EHJI
( Wx Wξ )fe(x, ξ) +hTe(x, ξ)he(x, ξ) +γ2ΦT(x, ξ)Φ(x, ξ) = 0, (2.16)
onde
fe(x, ξ) =
f(x) +g1(x)α1(x) +g2(x)α2(x)
f(ξ) +g1(ξ)α1(ξ) +g2(ξ)α2(ξ) +G(h2(x)−h2(ξ))
,
he(x, ξ) =α2(ξ)−α2(x),
Φ(x, ξ) = 2γ12(Wxg1(x) +WξGk21(x))T.
Ent˜ao o problema de atenua¸c˜ao de perturba¸c˜ao com estabilidade interna ´e resolvido pela realimenta¸c˜ao da sa´ıda
˙
ξ=f(ξ) +g1(ξ)α1(ξ) +g2(ξ)α2(ξ) +G(y−h2(ξ)),
u=α2(ξ).
Observa¸c˜ao 2.4. Para simplificar a an´alise e resultar em express˜oes mais simples para o controlador foi assumido no ´ultimo teorema que as matrizes da planta (2.14) satis-fazem as seguintes condi¸c˜oes, que s˜ao as vers˜oes n˜ao lineares das condi¸c˜oes assumidas por Doyle et al. (1989):
k11(x) = 0,
hT
1(x)k12(x) = 0,
kT
12(x)k12(x) =I,
k21(x)gT1(x) = 0,
kT
21(x)k21(x) =I.
(2.18)
Proposi¸c˜ao 2.2 (Isidori e Astolfi (1992); van der Schaft (1993)). Suponha que o sistema (2.14) seja linear, dado por
˙
x=Ax+B1w+B2u,
z =C1x+D11w+D12u,
y =C2x+D21w,
e assuma as seguintes hip´oteses
L1) O par (A, B1) ´e estabiliz´avel.
L2) O par A, C1 ´e detect´avel.
L3) Existe uma solu¸c˜ao sim´etrica definida positiva X da EAR
ATX+XA+CT
1C1−XB2B2TX+
1
γ2XB1B
T
1X = 0. (2.19)
L4) Existe uma solu¸c˜ao sim´etrica definida positiva Y da EAR
Y AT +AY +B
1B1T −Y C2TC2Y +
1 γ2Y C
T
1 C1Y = 0. (2.20)
L5) ρ(XY)< γ2.
G=ZCT
2,
V(x) = xTXx,
W(x, ξ) =γ2(x−ξ)TZ−1(x−ξ),
onde
Z =Y
µ
I− 1
γ2XY
¶−1
.
A EHJI (2.16) ´e sol´uvel sob as condi¸c˜oes da proposi¸c˜ao a seguir.
Proposi¸c˜ao 2.3 (Isidori e Astolfi (1992)). Suponha que o sistema ´e n˜ao linear e sua aproxima¸c˜ao linear na origem (x, w, u) = (0,0,0) satisfaz as hip´oteses L3), L4), L5 e
L3*) A matriz A + 1
γ2B1B1TX − B2B2TX tem todos os autovalores com parte real
negativa;
L4*) A matriz A + 1
γ2Y H1TH1 − Y H2TH2 tem todos os autovalores com parte real
negativa.
Suponha o controlador
˙
ξ = (A+B1F1+B2F2−GH2)ξ+Gy
u = F2ξ
(2.21)
onde F1 = (1/γ2)B1TX, F2 =−B2TX eG=ZH2T ´e control´avel e observ´avel. Ent˜ao as
hip´oteses H2)–H4) do teorema 2.5 s˜ao v´alidas, comG dado como na proposi¸c˜ao 2.2.
2.4
Inclus˜
ao de fun¸
c˜
oes pondera¸
c˜
ao com dinˆ
amica
no projeto de controle
H
∞n˜
ao linear
A vari´avel penalidade z inclui todas as sa´ıdas f´ısicas ou cuja norma L2 ´e
de-sej´avel ser minimizada. No contexto do controle H∞ linear, as vari´aveis penalidade
fun¸c˜oes com dinˆamica. Isso permite que, por exemplo, o erro de rastreamento, esfor¸co de controle, caracter´ısticas de sensibilidade e de robustez via resposta em freq¨uˆencia, atinjam crit´erios pr´e-estabelecidos. Crit´erios para sele¸c˜ao dessas fun¸c˜oes podem ser encontrados, por exemplo, em Zhou e Doyle (1998). Para controladores H∞ n˜ao
line-ares essas vari´aveis penalidade recebem ganhos est´aticos. Nesta tese ´e mostrado que fun¸c˜oes pondera¸c˜ao com dinˆamicas tamb´em podem ser usadas no projeto de controla-dores H∞ n˜ao lineares. A vantagem de seu uso ser´a mostrado atrav´es de um exemplo
de sistema de levita¸c˜ao magn´etica.
Considere um sistema n˜ao linear na forma afim
˙
xp =fp(xp) +gp1(xp)w+gp2(xp)u,
y=hp2(xp) +kp21(xp)w.
Considere, por exemplo, uma fun¸c˜ao pondera¸c˜ao linear com dinˆamica W1(s) (veja
figura 2.1) com a seguinte descri¸c˜ao de estados
u
Controlador
Planta z
w
y W (s)2
W (s)1 1
z2
Figura 2.1: Sistema em malha fechada com fun¸c˜ao pondera¸c˜ao
˙
xw1 =Aw1xw+Bw1y=Aw1xw +Bw1hp2(xp) +Bw1kp21(xp)w,
z1 =Cw1xw.
Note que Aw1, Bw1 e Cw1 s˜ao matrizes constantes. Al´em disso, por simplicidade,
considere que a entradau seja ponderada pela matriz constante W2
Combinando a planta com as fun¸c˜oes pondera¸c˜ao, tem-se
˙
x=f(x) +g1(x)w+g2(x)u,
z =h1(x) +k11(x)w+k12(x)u,
y=h2(x) +k21(x)u,
(2.22) onde x= xp
xw1
, f(x) =
fp(xp)
Aw1xw+Bw1hp2(xp)
,
g1(x) =
gp1(xp)
Bw1kp21(xp)
, g2(x) =
gp2(xp)
0 , z = z1 z2
, h1(x) =
Cw1xw
0
, k11(x) =
0 0
, k12(x) = 0 W2 ,
h2(x) =hp2(xp), k21(x) = kp21(xp).
Suponha que para o sistema (2.22) linearizado exista um controlador H∞ linear.
Ent˜ao, de acordo com o teorema 2.2 e a proposi¸c˜ao 2.2, existe um controladorH∞n˜ao
linear para o sistema (2.22). Em outras palavras, se as EARs (2.19) e (2.20) tˆem solu¸c˜ao para o sistema linearizado, ent˜ao as EHJIs (2.15) e (2.16) tamb´em tˆem solu¸c˜ao em uma vizinhan¸ca de x∈Rn.
2.5
Solu¸
c˜
ao das EHJI por expans˜
ao em s´
erie de
Taylor
(1992), Huang e Lin (1995), Yazdanpanah, Khorasani e Patel (1998), Tsiotras, Corless e Rotea (1998) e Sinha e Pechev (2004).
A expans˜ao em s´erie de Taylor, em geral, n˜ao converge monotonicamente. ´E dif´ıcil garantir estabilidade quando a s´erie ´e truncada em um n´umero finito de termos. Al´em disso, a regi˜ao de estabilidade da lei de controle aproximada ´e limitada pela regi˜ao de convergˆencia da s´erie. Essa regi˜ao ´e imposs´ıvel de ser determinada a priori.
2.5.1
Realimenta¸
c˜
ao de estados
Se a fun¸c˜ao armazenamentoV(x) e sua derivadaVx(x) forem expandidas em s´erie
de Taylor em torno da origem, ter˜ao a forma
V(x) = V(2)(x) +V(3)(x) +. . .=
∞
X
k=1
V(k+1)(x), Vx(x) = Vx(2)(x) +Vx(3)(x) +. . .=
∞
X
k=1
V(k+1)
x (x).
Assim, a lei de controleu∗(x) que minimiza a Hamiltoniana e a entrada ex´ogenaw∗(x)
que a maximiza podem ser expressas como
u∗(x) = u(1)∗ (x) +u
(2)
∗ (x) +. . .= ∞
X
k=1
u(∗k)(x),
w∗(x) = w(1)∗ (x) +w
(2)
∗ (x) +. . .= ∞
X
k=1
w(k)
∗ (x),
onde o sobre-escrito indica a ordem do termo da expans˜ao em s´erie de Taylor.
Aproxima¸c˜ao de primeira ordem: O problema de controle H∞ linear
Para o sistema linearizado
˙
x=Ax+B1w+B2u,
z =C1x+D11w+D12u,
a solu¸c˜ao do problema de controleH∞´e bem conhecida (Doyle et al., 1989). A fun¸c˜ao
armazenamento ´e dada por
V(2)(x) =xTP x.
Com esta fun¸c˜ao armazenamento, as aproxima¸c˜oes de primeira ordem para w∗ e u∗
ficam
w∗(1) = γ12B1TP x,
u(1)∗ (x) = −B2TP x.
(2.23)
A EHJI (2.15) se reduz `a seguinte EAR
ATP +P A+P µ
1 γ2B1B
T
1 −B2BT2
¶
P +CT
1 C1 = 0. (2.24)
Esta EAR e a lei de controle correspondem `a solu¸c˜ao do problema de controleH∞linear.
Aproxima¸c˜oes de ordem superior
Com a planta linearizada, a dinˆamica da planta pode ser reescrita como
˙
x=Ax+B1w+B2u+f(x, w, u),
com taxa de suprimento s(w, z)
zTz−γ2wTw=C1TC1+uTu−γ2wTw+g(x, w, u).
O termo de ordem m,V(m)(x), de V(x) e termos de ordem superior dew
∗ eu∗ podem
ser determinados recursivamente por
Vx(m) µ
A+ 1 γ2B1B
T
1P −B2B2TP
¶
= [−Vx(B1w∗ +B2u∗−Vxf(x, w∗, u∗)
w∗(k)= 2γ12 ³
BT
1VxT + ∂f ∂w T
(x, w∗, u∗)VxT + ∂g ∂w
T
(x, w∗, u∗)
´(k)
, k = 2,3, . . .
u(∗k)=−12
³
BT
2VxT + ∂f ∂u T
(x, w∗, u∗)VxT + ∂g ∂u T
(x, w∗, u∗)
´(k)
.
(2.25)
2.5.2
Realimenta¸
c˜
ao da sa´ıda
Para resolver a EHJI (2.16) referente ao problema de realimenta¸c˜ao da sa´ıda, a fun¸c˜ao armazenamentoW(x) pode ser expandida em s´erie de Taylor como
W(x) =
∞
X
k=1
W(k)(x). (2.26)
Aproxima¸c˜ao de primeira ordem
A fun¸c˜ao armazenamento ´e dada por
W(x) = xTQx. (2.27)
O problema ´e reduzido a resolver a EHJI (2.16) para a matrizRdesconhecida (R =RT,
R >0). O m´aximo da Hamiltoniana (2.12) fica
ˆ
w(x, WT
x ) =
1 2γ2(2B
T
1Rx−D21Y(x, WxT)), (2.28)
e o m´ınimo fica
y∗(x, Wx) = 2(D21B1TRx+γ2C2x). (2.29)
Substituindo (2.27), (2.28) e (2.29) em (2.16), a EHJI pode ser reescrita como uma EAR da forma
AQQ+QAQ+QBQQ+CQ= 0. (2.30)
AQ = A−B1D21T C2,
BQ =
1 γ2(B1B
T
1 −B1B1T),
CQ = C1TC1−H∗.
A inje¸c˜ao da sa´ıdaG´e dada por
(Q−P)G=D21B1TR+γ2C2, (2.31)
onde P ´e solu¸c˜ao de (2.24) eQ´e a solu¸c˜ao de (2.30).
Aproxima¸c˜oes de ordem superior
Substituindo a aproxima¸c˜ao em s´erie de Taylor da fun¸c˜ao armazenamento (2.26) na EHJI (2.16) podem ser obtidas as seguintes express˜oes que permitem o c´alculo recursivo deW(x) e w∗∗
Wx(m)(Ax+B1w∗∗(1)−GC2x) = [−WxB1w∗∗−Wxf(x, w∗∗,0) +y∗T(x, W
T
x)Y(x, w∗∗) +
γ2wT∗∗w∗∗−g(x, w∗∗,0) +H(x, VxT, w∗, u∗)](m),
m = 3,4, . . .
w∗∗(x, WxT) =
1 2γ2 =
µ
∂g
∂w(x, w,0)−y
T∂Y
∂w(x, w) +Wx ∂F
∂w(x, w,0)
¶T¯
¯ ¯ ¯ ¯
(k)
w=w∗∗(x,WxT)
,
Aproxima¸
c˜
ao sucessiva de Galerkin
para o controle
H
∞
n˜
ao linear
3.1
Introdu¸
c˜
ao
Neste cap´ıtulo ser´a apresentado o m´etodo chamado de aproxima¸c˜ao sucessiva de Galerkin (ASG) para solu¸c˜ao da EHJI. Esse algoritmo combina o m´etodo de apro-xima¸c˜oes sucessivas, que transforma a EHJI em uma seq¨uˆencia de EDPs lineares, com o m´etodo de Galerkin, que aproxima a solu¸c˜ao dessa seq¨uˆencia de EDPs. Beard e McLain (1998) usam este m´etodo para resolver a EHJI referente ao problema de con-trole H∞ n˜ao linear via realimenta¸c˜ao de estados e aqui ´e aplicado para resolver o
problema de controle H∞ n˜ao linear via realimenta¸c˜ao da sa´ıda. Este algoritmo,
jun-tamente com sua prova de convergˆencia s˜ao as principais contribui¸c˜oes desta tese.
3.2
Aproxima¸
c˜
ao sucessiva
calcu-lar sucessivamente o controle sub-´otimo para sistemas lineares com performance n˜ao quadr´atica. Haussler (1963) estendeu a id´eia para sistemas n˜ao lineares e mostrou que o m´etodo poderia prover simultaneamente barreiras inferiores e superiores na deriva¸c˜ao do controle sub-´otimo a partir do controle ´otimo.
O m´etodo das aproxima¸c˜oes sucessivas recebeu pela primeira vez uma funda-menta¸c˜ao te´orica por Saridis e Lee (1979). Os autores usam aproxima¸c˜ao sucessiva para propor um algoritmo que melhora a perfomance de um controle inicial estabi-lizante. ´E mostrado que o m´etodo converge monotonamente para a solu¸c˜ao ´otima, isto ´e, para a solu¸c˜ao da EHJB. O algoritmo foi posteriormente estendido para siste-mas n˜ao lineares estoc´aticos por Saridis e Wang (1994). Wise e Sedwick (1994) usam aproxima¸c˜oes sucessivas pela primeira vez na EHJI relativa ao problema de controle H∞ via realimenta¸c˜ao de estados para transform´a-la em uma s´erie de EDPs lineares.
Bertsekas (1976) mostra que o algoritmo de aproxima¸c˜oes sucessivas ´e uma contra¸c˜ao em um espa¸co completo e portanto, tem solu¸c˜ao ´unica. Al´em disso, neste trabalho s˜ao derivadas barreiras expl´ıcitas da sub-otimalidade a cada itera¸c˜ao. A principal dificul-dade em todos estes trabalhos ´e resolver a EHJB e assim, o m´etodo n˜ao ´e aplicado em sistemas reais.
3.2.1
Realimenta¸
c˜
ao de estados
A EHJI (2.10) para uma lei de controle estabilizante inicialu(0)e uma perturba¸c˜ao
w(0) pode ser reescrita como
∂V(0)
∂x
T
(f+g1w(0)+g2u(0)) +hT1h1+ku(0)k2−γ2kw(0)k2 = 0,
que ´e linear emV(0). Para melhorar a performance da lei de controle u(0), ´e encontrada
u(1) que minimiza a Hamiltoniana (2.5) e w(0) que a maximiza
u(1) = −1
2g
T
2
∂V(0)
∂x ,
w(1) = 1 2γ2g
T
1
∂V(0)
Se para um dadoi, V(i+1)(x) =V(i)(x), ent˜ao V(i+1)(x) = V∗(x). Da´ı
∂V∗
∂x
T
(f +g1w∗+g2u∗) +hT1h1+ku∗k2−γ2kw∗k2 = 0,
com
u∗
= −1
2g
T
2
∂V∗
∂x , w∗
= 1 2γ2g
T
1
∂V∗
∂x .
Escrevendo a EHJI desta forma deixa claro que a fonte de n˜ao linearidade est´a em u e w, que dependem do valor da fun¸c˜ao V. Para reduzir a EHJI a uma seq¨uˆencia de equa¸c˜oes diferenciais parciais, devem ser usadas duas itera¸c˜oes simultˆaneas da apro-xima¸c˜ao sucessiva. O algoritmo ´e listado a seguir
Algoritmo 3.1. Sejau(0) uma lei de controle estabilizante inicial para o sistema (2.9)
(w= 0) com regi˜ao de estabilidade Ω.
Parai= 0,1,2,3, . . .
Fa¸ca w(i,0) = 0
Para j = 0,1,2,3, . . .
Resolva para V(i,j) de
∂V(i,j)
∂x (f +g1w
(i,j)+g
2u(i,j)) +hT1h1+ku(i)k2−γ2kw(i,j)k2 = 0
Atualize a perturba¸c˜ao
w(i,j+1) = 1 2γ2g1T∂V
(i,j)
∂x
Fim
Atualize o controle
u(i+1) =−1 2g
T
2 ∂V
(i,j) ∂x
Fim
Esta itera¸c˜ao tem uma interpreta¸c˜ao da teoria de jogos. Dado um controle u(i)
pode suportar. Depois que esta perturba¸c˜ao de pior caso ´e encontrada, o controle ´e atualizado para melhorar a performance do sistema para esta perturba¸c˜ao.
A essˆencia do algoritmo 3.1 ´e reduzir a EHJI a uma seq¨uˆencia infinita de equa¸c˜oes diferenciais parciais lineares da forma
∂V ∂x
T
(f +g1w+g2u) +hT1h1+kuk2−γ2kwk2 = 0,
ondeuew s˜ao fun¸c˜oes conhecidas dex. Beard e McLain (1998) chamam essa equa¸c˜ao de Equa¸c˜ao de Hamilton-Jacobi-Isaacs Generalizada (EHJIG), tamb´em conhecida como pr´e Hamiltoniana. Essa equa¸c˜ao ´e dif´ıcil de ser resolvida analiticamente. Na se¸c˜ao 3.3.1 ser´a usado o m´etodo de Galerkin para aproximar essa equa¸c˜ao.
3.2.2
Realimenta¸
c˜
ao da sa´ıda
Para o problema de realimenta¸c˜ao da sa´ıda, considere a seguinte fun¸c˜ao Hamil-toniana
K(x, p, w, y) = pTF(x, w,0)−yTY(x, w) +ZT(x,0)Z(x,0)−γ2wTw
= pT(f(x) +g
1(x)w)−yT(h2(x) +k21w) +hT1(x)h1(x)−γ2wTw
= pTf(x) +pTg
1(x)w−yTh2(x)−yTk21(x)w+hT1(x)h1(x)−γ2wTw.
A ´ultima express˜ao ´e a pr´e-Hamiltoniana do problema. No ponto de sela, tem-se
∂K
∂w(x, p, w, y)
¯ ¯ ¯ ¯w
= ˆw(x,p,y)
=g1Tp−k21T (x)y−2γ2wˆ = 0 ⇒
ˆ
w(x, p, y) = 1 2γ2(g
T
K(x, p,w, y) =ˆ pT(f(x) +g
1(x)21γ2(g1T(x)p−k21T (x)y))
−yT(h
2(x) +k2121γ2(g1T(x)p−kT21(x)y)) +hT1(x)h1(x)
−γ2 1
2γ2(pTg1(x)−yTk21(x))2γ12(gT1(x)p−k21T(x)y)
=pTf(x) + 1 2γ2p
Tg
1(x)g1T(x)p− 2γ12p
Tg
1(x)kT21(x)y−yTh2(x)
−2γ12yTk21(x)g1T(x)p+21γ2k21(x)k21T (x)y+hT1(x)h1(x)− 41γ2pTg1(x)g1T(x)p
+41γ2p
Tg
1(x)k21T(x)y+ 41γ2y
Tk
21(x)g1T(x)p− 41γ2y
Tk
21(x)kT21(x)y
=pTf(x) + 1
4γ2pTg1(x)g1T(x)p−yTh2(x) + 41γ2yTy+hT1(x)h1(x),
∂K
∂y (x, p,w, y)ˆ
¯ ¯ ¯ ¯
y=y∗(x,p)
=−h2(x) +
1
2γ2y∗(x, p) = 0 ⇒ y∗(x, p) = 2γ 2h
2(x),
w∗∗(x, p) = ˆw(x, p, y∗(x, p)) =
1 2γ2g
T
1(x)p−k
T
21(x)h2(x).
Adotandop=Wx(x), tem-se
y∗(x, Wx(x)) = 2γ2h2(x), (3.1)
w∗∗(x, Wx(x)) =
1 2γ2g
T
1(x)Wx(x)−k21T(x)h2(x). (3.2)
Para esse ponto, a Hamiltoniana pode ser escrita como
K(x, Wx(x), w∗∗(x, Wx(x)), y∗(x, Wx(x))) =WxT(x)F(x, w∗∗(x, Wx(x)),0)
−yT
∗(x, Wx(x))Y(x, w∗∗(x, Wx(x))) +ZT(x,0)Z(x,0)
−γ2wT
∗∗(x, Wx(x))w∗∗(x, Wx(x))
=WT
x(x)(f(x) +g1(x)w∗∗(x, Wx(x)))−yT∗(h2(x) +k21w∗∗(x, Wx(x))) +hT1(x)h1(x)
−γ2wT
∗∗(x, Wx(x))w∗∗(x, Wx(x)).
Para resolver o problema de controle H∞ n˜ao linear via realimenta¸c˜ao da sa´ıda, a
seguinte DHJI deve ser satisfeita
com
W(x)>0 e Wx(x)−Vx(x)>0, ∀x6= 0.
Algoritmo 3.2. Sejaw uma entrada ex´ogena com regi˜ao de estabilidade Ω
Parai= 0,1,2,3, . . .
Resolva para W(i) de
Wxf+Wxg1w(i)−yTh2−yTk21w(i)+hT1h1−γ2kw(i)k2−H∗ = 0
Atualize a perturba¸c˜ao
w(i+1) = 1 2γ2g
T
1Wx−k21T h2
Fim
3.3
M´
etodo de Galerkin
A seguir ser´a apresentado brevemente o m´etodo de aproxima¸c˜ao de Galerkin. Para um tratamento mais rigoroso e completo veja, por exemplo, Guenther e Lee (1988), Celia e Gray (1992) ou Fletcher (1984). A id´eia b´asica por tr´as do m´etodo de Galerkin ´e a proje¸c˜ao linear. Suponha que ´e dado um vetor arbitr´ario v ∈ R3 e que
deseja-se aproximar este vetor como uma combina¸c˜ao linear de dois vetores linearmente independentes emR2, isto ´e, deseja-se encontrar c
i,i= 1,2, tal que
ˆ
v ≈c1xˆ1+c2xˆ2,
como ´e poss´ıvel ver na figura 3.1.
Para encontrar os coeficientes ci, o vetorv ´e projetado nos vetores ˆxi, obtendo o
seguinte sistema linear
hv,xˆ1i
hv,xˆ2i
=
hxˆ1,xˆ1i hxˆ2,xˆ1i
hxˆ1,xˆ2i hxˆ2,xˆ2i
c1
c2
x
1
x
2
x
3
v
v^
c
1
c
2
c
3
Figura 3.1: Proje¸c˜ao de um vetor do R3 no R2
onde o operador proje¸c˜ao ´e o produto interno em R3. A matriz que multiplica os
coeficientes ´e chamada matriz Gramiana dos vetores xi’s e ´e invert´ıvel se os xi’s s˜ao
linearmente independentes. Os coeficientes s˜ao encontrados pela invers˜ao da matriz Gramiana.
O m´etodo de Galerkin ´e uma extens˜ao dessa id´eia para o espa¸co de fun¸c˜oes. Dada uma equa¸c˜ao diferencialLV +η= 0, onde L´e um operador linear e ηest´a na imagem de L, a solu¸c˜ao V ´e assumida pertencer ao espa¸co gerado pela combina¸c˜ao linear de um conjunto de fun¸c˜oes linearmente independentes span{φj}∞j=1, isto ´e,
V(x) =
∞
X
j=1
cjφj(x).
Como h´a um n´umero infinito de cj, a s´erie deve ser truncada para formar uma
apro-xima¸c˜ao paraV
VN(x) = N X
j=1
cjφj(x).
Quando VN ´e substitu´ıdo na equa¸c˜ao diferencial o erro obtido ´e
erro =LVN +η.
herro, φji= 0, j = 1, . . . , N,
onde o operador proje¸c˜ao ´e o produto interno em um espa¸co de Hilbert apropriado.
O m´etodo de Galerkin ser´a usado para aproximar a solu¸c˜ao da EHJIG em um conjunto compacto Ω. ´E assumido que ´e poss´ıvel selecionar um conjunto{φj}∞j=1, onde
φj(0) = 0 de fun¸c˜oes (n˜ao necessariamente linearmente independentes) em Ω em que
V(i) ´e combina¸c˜ao linear dessas fun¸c˜oes para todo x∈Ω, onde V(i) resolve a EHJIG.
´
E procurada uma solu¸c˜ao aproximada VN(i), para a equa¸c˜aoH(V(i), u(i), w(i)) = 0,
tal que
VN(i)(x) =
N X
j=1
c(ji)φj(x).
A substitui¸c˜ao dessa express˜ao na EHJIG resulta em um erro
erro =H
à N
X
j=1
c(ji)φj, u(i), w(i) !
.
Os coeficientesc(ji) s˜ao determinados igualando a zero a proje¸c˜ao do erro em uma base
finita{φj}Nj=1, ∀x∈Ω
*
H
à N
X
j=1
c(ji)φj, u(i), w(i) !
, φn +
Ω
= 0, n = 1, . . . , N,
onde o produto interno ´e definido como
hf, giΩ =
Z
Ω
f(x)g(x)dx.
3.3.1
Realimenta¸
c˜
ao de estados
(1998). Assuma queu: Ω→Rm ´e uma lei de controle que estabiliza assintoticamente
o sistema (2.9) em um conjunto compacto Ω. Assuma tamb´em que o conjunto{φ(vj)}∞j=1
´e uma base completa para o dom´ınio da EHJI (2.10). Uma solu¸c˜ao aproximada desta equa¸c˜ao pode ser dada por
VN(x) = N X
j=1
c(vj)φ( j)
v (x),
onde os coeficientes devem satisfazer a equa¸c˜ao
Z
Ω
H(x, VT
x (x), w, u)φldx= 0,
Z
Ω
∂³PNj=1c(vj)φ(vj) ´T
∂x (f+g1w+g2u) +h
T
1h1+kuk2−γ2kwk2
φldx= 0,
Z Ω Ã N X j=1
c(vj)
∂φ(vj)
∂x
!T
(f +g1w+g2u) +hT1h1+kuk2−γ2kwk2
φldx= 0. (3.4)
Definindo cv = [ c(1)v . . . c(vN) ]T, φv(x) = [ φ(1)v . . . φ(vN) ] e
∇φv(x) = [ ∂φ(1)v /∂x . . . ∂φ(vN)/∂x ], a equa¸c˜ao (3.4) pode ser reescrita como Z
Ω
£
cTv∇φv(f+g1w+g2u) +hT1h1+kuk2−γ2kwk2
¤
φvdx= 0,
cT v
Z
Ω
∇φv(f +g1w+g2u)φvdx=− Z
Ω
(hT
1h1+kuk2−γ2kwk2)φvdx, ·Z
Ω
φv(f +g1w+g2u)T∇φTvdx ¸
cv =− Z
Ω
φv(hT1h1+kuk2−γ2kwk2)dx,
£¡R
Ωφvf
T∇φT
vdx
¢
+¡R
Ωφvw
TgT
1∇φTvdx ¢
+¡R
Ωφvu
TgT
2∇φTvdx ¢¤
cv =
−R
Ωφvh
T
1h1dx−
R
Ωφvkuk2dx+γ2
R
(A1+A2(w) +A3(u))cv =b1+b2(w) +b3(u),
onde A1, b1, n˜ao dependem nem do controle u e nem da entrada ex´ogena w. Assim,
dadosuew, a EHJI pode ser aproximada resolvendo integrais e invertendo uma matriz.
As integrais A2(w), A3(u), b2(w) e b3(u) n˜ao precisam ser recalculadas a cada
passo do algoritmo. Usando a fun¸c˜ao VN para calcular e atualizar o controle u e a
entrada ex´ogenaw, tem-se
w= 1 2γ2g
T
1
∂VN
∂x = 1 2γ2g
T
1
N X
j=1
c(vj)
∂φ(vj)
∂x = 1 2γ2g
T
1∇φ
T vcv,
u=−1
2g
T
2
∂VN
∂x =− 1 2g T 2 N X j=1
c(vj)
∂φ(vj)
∂x =− 1 2g
T
2∇φ
T
vcv. (3.5)
Para encontrar um valor aproximado parauew, as integraisA2(w),A3(u),b2(w)
eb3(u) devem ser calculadas, mas
A2(w) =
Z
Ω
φvwTg1T∇φTvdx=
1 2γ2
Z
Ω
φvcTv∇φvg1gT1∇φTvdx
= 1 2γ2
N X
j=1
c(j)
v Z
Ω
φv
∂φ(vj)
∂x
T
g1gT1∇φTvdx=
1 2γ2
N X
j=1
c(j)
v G
(j) 1 ,
A3(u) =
Z
Ω
φvuTgT2∇φTvdx=
1 2
Z
Ω
φvcTv∇φvg2g2T∇φTvdx
= 1 2
N X
j=1
c(j)
v Z
Ω
φv
∂φ(vj)
∂x
T
g2g2T∇φTvdx=
1 2
N X
j=1
c(j)
v G
(j) 2 ,
b2(w) =
Z
Ω
φvwTwdx=
1 4γ2
Z
Ω
φvcTv∇φvg1gT1∇φ
T
vcvdx
= 1 4γ2
N X
j=1
c(vj) Z
Ω
φv
∂φ(vj)
∂x
T
g1gT1∇φ
T
vdxcv =
1 4γ2
N X
j=1
c(vj)G
b3(u) =
Z
Ω
φvuTudx=
1 4
Z
Ω
φvcTv∇φvg2g2T∇φTvcvdx
= 1 4
N X
j=1
c(j)
v Z
Ω
φv
∂φ(vj)
∂x
T
g2g2T∇φTvdxcv =
1 4
N X
j=1
c(j)
v G
(j) 2 cv.
Assim, tem-se
µ
A1+
1 2γ2A2(c
(n)
v )−
1 2A3(c
(n)
v )
¶
c(vn+1) =−b1+
1 4γ2b2(c
(n)
v )−
1 4b3(c
(n)
v ),
A1 =
R
Ωφvf
T∇φT
vdx, A2(cv) = N X
j=1
c(vj)G
(j)
1 , A3(cv) = N X
j=1
c(vj)G
(j) 2 ,
b1 =
R
Ωφvh
T
1h1dx b2(cv) = N X
j=1
c(j)
v G
(j)
1 cv, b3 =
N X
j=1
c(j)
v G
(j) 2 cv,
G(1j)=
Z
Ω
φv
∂φ(vj)
∂x
T
g1g1T∇φTvdx, G
(j) 2 =
Z
Ω
φv
∂φ(vj)
∂x
T
g2g2T∇φTvdx,
e, portanto, os coeficientescv ficam fora das integrais eA2(w),A3(u),b2(w) eb3(u)
po-dem ser calculadas iterativamente a partir das matrizes{G(1j)}N
j=1e{G
(j)
2 }Nj=1calculadas
previamente.
A aproxima¸c˜ao de Galerkin para a EHJI pode ser combinada com o algoritmo 3.1 para produzir o algoritmo a seguir para calcular uma aproxima¸c˜ao para a EHJI.
Algoritmo 3.3. Sejau(0) uma lei de controle estabilizante inicial ew= 0. Pr´e calcule as integraisA1, A3(u(0)), b1, b3(u(0)), {G(1j)}Nj=1 e{G
(j) 2 }Nj=1.
Parai= 0,1,2,3, . . .
Se i= 0
A(i) =A
1+A3(u(0))
b(i)=−b
1−b3(u(0))
A(i) =A
1− 12PNk=1c (i−1)
v (k)G(2k)
b(i)=−b
1−14PNk=1c (i−1)
v (k)G(2k)c(i
−1)
v
Fim
Para j = 0,1,2,3, . . .
Sej = 0
A=A(i)
b=b(i)
Se n˜ao
A=A(i)+ 1 2γ2
PN
k=1c
(i,j−1)
v (k)G(1k)
b=b(i)+ 1 4γ2
PN
k=1c
(i,j−1)
v (k)G(1k)c(vi,j−1)
Fim
c(vi,j)=A−1b
Fim
Fim
u=−1 2g
T
2∇φTvcv
w= 2γ12g1T∇φTvcv
O crit´erio de parada usado ´e kc(vi,j+1)−cv(i,j)k< ε para o la¸co interno e kc(vi+1)−
c(vi)k < ε para o la¸co externo, com ε pequeno (tipicamente 0,001 (Beard e McLain,
1998)).