Desenvolvimento de um chuto omnidirecional para um robô humanoide
96
0
0
Texto
Imagem
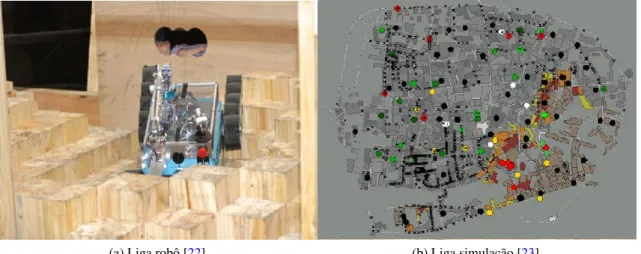
![Figura 2.1: RoboCup - Liga de robôs de tamanho médio [8].](https://thumb-eu.123doks.com/thumbv2/123dok_br/15631322.1056191/26.892.277.660.143.431/figura-robocup-liga-de-robôs-de-tamanho-médio.webp)
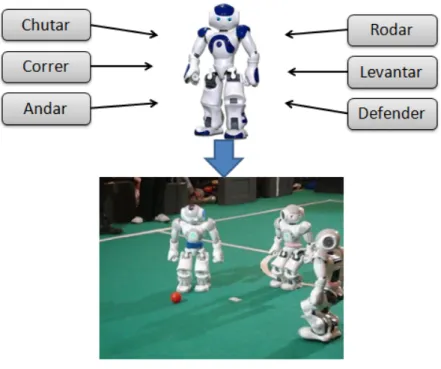
![Figura 2.3: RoboCup - Liga de robôs com plataforma normalizada [12].](https://thumb-eu.123doks.com/thumbv2/123dok_br/15631322.1056191/27.892.233.615.210.457/figura-robocup-liga-de-robôs-com-plataforma-normalizada.webp)
+7

![Figura 3.6: Dimensões do campo simulado [42].](https://thumb-eu.123doks.com/thumbv2/123dok_br/15631322.1056191/41.892.195.660.488.804/figura-dimensões-do-campo-simulado.webp)
![Figura 5.3: Orientação de um referencial em relação a outro (2D) [51].](https://thumb-eu.123doks.com/thumbv2/123dok_br/15631322.1056191/56.892.291.653.152.417/figura-orientação-de-um-referencial-em-relação-outro.webp)
![Figura 5.7: Configuração dos referenciais usados na cinemática inversa. Vermelho=eixo-x, verde=eixo-y e azul=eixo-z [53]](https://thumb-eu.123doks.com/thumbv2/123dok_br/15631322.1056191/61.892.114.734.142.690/figura-configuração-referenciais-usados-cinemática-inversa-vermelho-verde.webp)
![Figura 5.8: Triângulo constituído pelo joelho e pelos membros da perna. Adaptado de [53]](https://thumb-eu.123doks.com/thumbv2/123dok_br/15631322.1056191/62.892.317.621.140.552/figura-triângulo-constituído-joelho-pelos-membros-perna-adaptado.webp)
Documentos relacionados