O Problema da Braquist´
ocrona
Flaviano Bahia P. Vieira
aLa´ıs B´assame Rodrigues
bEdson Agustini
cFaculdade de Matem´atica - Famat Universidade Federal de Uberlˆandia - Ufu- MG
Agosto de 2004
Resumo
Neste trabalho, deduzimos as equa¸c˜oes param´etricas da curva chamada braquis-t´ocrona: curva descrita por uma part´ıcula que desliza sobre ela, sem atrito, de modo a atingir no tempo m´ınimo um ponto Q, partindo de um ponto P que est´a acima do primeiro, mas n˜ao na vertical. Dessa forma, essa curva ´e solu¸c˜ao de um interessante problema de otimiza¸c˜ao de trajet´orias que foi lan¸cado por Johann Bernoulli em 1696 como desafio aos matem´aticos da ´epoca. Tamb´em mostramos que uma braquist´ocrona pode ser uma taut´ocrona: curvas sobre a qual uma part´ıcula desliza sem atrito, sob a a¸c˜ao da gravidade, e atinge a parte mais baixa sempre no mesmo intervalo de tempo, qualquer que seja o seu ponto de partida sobre a curva.
Palavras-chave: Braquist´ocrona. Taut´ocrona. Cicl´oide. Equa¸c˜oes Diferenci-ais Ordin´arias N˜ao Lineares.
1
Introdu¸
c˜
ao Hist´
orica
Em uma mat´eria do jornal Acta Eruditorium de junho de 1696, Johann Bernoulli - um professor su´ı¸co da Universidade de Groningen, na Holanda - desafiou os matem´aticos da ´epoca a resolverem o seguinte problema:
“Dados dois pontos P e Q em um plano vertical e em desn´ıvel (isto ´e, a reta que os cont´em n˜ao est´a na “horizontal” e nem na “vertical”), qual ´e a curva que os liga de tal modo que uma part´ıcula partindo do repouso do ponto mais alto P e deslizando sobre ela sem atrito, sob a¸c˜ao da gravidade, gasta o menor tempo para atingir o ponto mais baixo
Q?”
a
[email protected] Orientando do Programa de Educa¸c˜ao Tutorial da Faculdade de Matem´atica (PetMat) de jan/04 a dez/04.
b
[email protected] Orientanda do Programa de Educa¸c˜ao Tutorial da Faculdade de Matem´atica (PetMat) de jan/04 a dez/04.
c
Figura 1: Qual ´e a curva “de menor tempo” entre P e Q?
Essa curva, segundo sugest˜ao de Leibniz, ficou conhecida por “braquist´ocrona”, do gregoβ̺αχυς - br´aquis - que significa “menor” eχ̺σνσς - cronos - que significa “tempo”. O mesmo jornal de maio de 1697 trazia artigos sobre o problema de seis dos mais renoma-dos matem´aticos da ´epoca: Johann Bernoulli, Jacob Bernoulli, Isaac Newton, Marquˆes de L’Hospital, Gottfried Leibniz e Ehrenfried Tschirnhaus.
Figura 2: Johann Bernoulli, 1667-1748.
Johann Bernoulli n˜ao foi o primeiro a considerar o problema da braquist´ocrona. Galileu estudou-o em 1638 no seu famoso trabalho Discourse on two new science. Nesse trabalho, Galileu propˆos que um arco de circunferˆencia seria a solu¸c˜ao; no entanto, como veremos abaixo, a solu¸c˜ao n˜ao ´e um arco de circunferˆencia, mas sim um arco de cicl´oide.
2
Modelagem do Problema
ser´a a curva braquist´ocrona (aqui estamos admitindo o Princ´ıpio de Fermat que diz que a luz sempre percorre a trajet´oria de menor tempo poss´ıvel para viajar no espa¸co). Veja a Figura 3.
Figura 3: Uma part´ıcula viajando por diferentes meios.
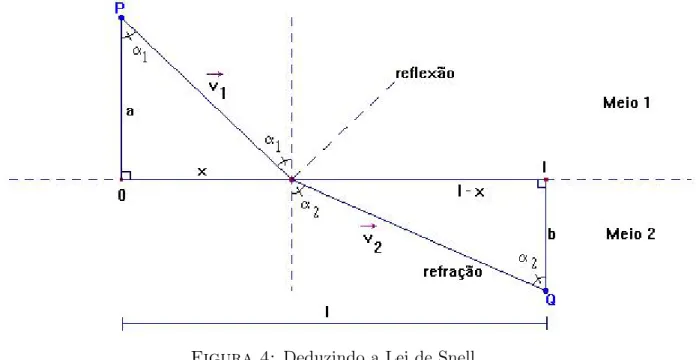
Baseados no racioc´ınio acima, suponhamos dois meios (camadas da atmosfera) de diferentes densidades e um raio de luz atravessando-os.
Figura 4: Deduzindo a Lei de Snell.
Meio 2 a velocidade seja representada por −→v 2. Seja T : [0, l]→ R a fun¸c˜ao tempo gasto no percurso do raio de luz, sendoxa distˆancia do ponto em que o raio atravessa a fronteira entre os meios at´e a proje¸c˜ao ortogonal de P nessa fronteira (veja figura acima). Assim,
T(x) =
√
a2+x2 v1
+
q
b2+ (l−x)2
v2
,
sendo v1 =||−→v 1|| e v2 =||−→v 2||.
Obs.: “velocidade = distˆancia
tempo ⇒tempo=
distˆancia velocidade”.
Nosso objetivo ´e minimizar a fun¸c˜ao T.Derivando:
T′(x) = x v1
√
a2+x2 +
x−l
v2
q
b2+ (l−x)2 .
Igualando a 0:
T′(x) = 0 x
v1
√
a2+x2 +
x−l
v2 q
b2+ (l−x)2 = 0
x v1
√
a2+x2 =
l−x
v2 q
b2+ (l−x)2
(1)
Observemos que:
senα1 = x
√
a2+x2 (2)
e
senα2 =
l−x
q
b2+ (l−x)2
. (3)
Logo, substituindo (2) e (3) em (1) chegamos a: senα1
v1
= senα2 v2
, (4)
equa¸c˜ao conhecida como “Lei de Snell”. Observemos que se tiv´essemos n meios:
senα1 v1
= senα2 v2
=...= senαn vn
=k, (5)
k constante.
Nas condi¸c˜oes acima, o valor x que faz (4) ocorrer ´e ponto de m´ınimo da fun¸c˜ao T. De fato, derivando T′:
T′′(x) = 1 v1
a2
q
(a2+x2)3 + 1 v2 b2 q ¡
b2 + (l−x)2¢3
que ´e sempre um valor positivo para qualquer x,pois v1 ev2 s˜ao n´umeros positivos.
FAZENDO A ESPESSURA DAS CAMADAS DOS MEIOS TENDER A ZERO
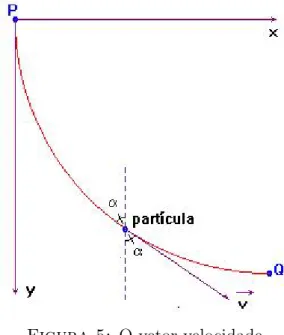
Consideremos o esquema apresentado na Figura 5 abaixo, na qual fixamos um sistema de coordenadas cartesiano ortogonal com centro em P e eixo das ordenadas orientado “para baixo”. Quando fazemos a espessura das camadas dos meios tender a zero, estamos fazendo o n´umero de meios entre os pontos P e Q tender a infinito e, portanto, temos bem definido o vetor velocidade −→v da part´ıcula tangente `a curva procurada. Pelo que vimos acima, para o m´odulo desse vetor vale a Lei de Snell (5):
v
senα =k (6)
sendo k constante e α o ˆangulo de incidˆencia do raio de luz no meio.
Figura 5: O vetor velocidade.
Consideremos um elemento de comprimento ∆s do percurso do raio de luz e suas proje¸c˜oes ∆x e ∆y paralelas aos eixos coordenados (Figura 6):
Assim:
(∆s)2 = (∆x)2+ (∆y)2
e
senα′ = ∆x ∆s. fazendo ∆s→0 temos que α′ →α e:
(ds)2 = (dx)2+ (dy)2
e
senα= dx ds =
dx
q
(dx)2+ (dy)2
= dx dx
q
1 +¡dy
dx
¢2
= q 1
1 + (y′)2
(7)
Pela lei de conserva¸c˜ao da energia mecˆanica, quando o raio de luz percorrer a distˆancia ds, temos:
mgy = 1 2mv
2
⇒2gy=v2 ⇒v =p2gy (8)
sendo m a massa da part´ıcula, v o m´odulo de sua velocidade −→v e y o desn´ıvel entre P e Q.
Substituindo (7) e (8) em (6), temos:
√
2gy 1
√
1+(y′)2
=k ⇒y³1 + (y′)2´=
µ
k
√
2g
¶2
=c2,
ou seja, temos que resolver a equa¸c˜ao diferencial ordin´aria de primeira ordem n˜ao linear
y³1 + (y′)2´=c2. (9)
RESOLVENDO A EQUAC¸ ˜AO DIFERENCIAL
Considerando a equa¸c˜ao (9):
y³1 + (y′)2´=c2 ⇒1 + (y′)2 = c 2
y ⇒(y
′)2 = c 2
y −1⇒y ′ =
s
c2 y −1.
Obs.: o sinal escolhido ´e positivo devido `a orienta¸c˜ao escolhida para o eixo das ordenadas.
Fa¸camos a mudan¸ca de vari´aveis
y=c2sen2θ
Logo,
y′ =
r
c2
c2sen2θ −1 = r
1−sen2θ
sen2θ = cotgθ ⇒ dy dx =
cosθ
senθ (10)
Mas
y =c2sen2θ ⇒ dy dx = 2c
2senθ(x) cosθ(x) dθ
dx (11)
Logo, de (10) e (11):
cosθ(x) senθ(x) = 2c
2senθ(x) cosθ(x)dθ dx ⇒2c
2sen2θ(x)dθ =dx (12)
Fa¸camos uma nova mudan¸ca de vari´aveis: 2θ =ω. Temos:
2θ(x) = ω(x)⇒θ(x) = ω(x) 2 ⇒
dθ dx =
dω
2dx ⇒dθ = dω
2 . (13)
Logo, de (12) e (13):
2c2sen2³ω 2
´dω
2 =dx⇒ c2sen2³ω
2
´
dω =dx⇒
Z
c2sen2³ω 2
´
dω =
Z
dx+d⇒ (d constante)
Z
c21−cosω
2 dω =x+d⇒
Z
c2 2dω−
Z
c2cosω
2 dω =x+d⇒ c2
2ω−
c2senω
2 dω =x+d⇒
(ω−senω)c 2
2 =x+d
Mas, quando x= 0, temos
y(0) = 0⇒ c2sen2θ(0) = 0⇒ θ(0) = 0⇒ ω(0)
2 = 0⇒ ω(0) = 0.
Logo, d= 0 e concluimos que
x= c 2
2 (ω−senω).
Como y=c2sen2θ, temos
y=c2sen2³ω 2
´
=c2
µ
1−cosω 2
¶
= c 2
Logo, as equa¸c˜oes param´etricas da curva procurada ser´a
x= c 2
2 (ω−senω) (14) e
y = c 2
2 (1−cosω) (15)
Concluimos que as equa¸c˜oes param´etricas da curva γ otimizada ser´a, paraω variando em um intervalo conveniente, as equa¸c˜oes de um peda¸co de cicl´oide:
γ : [a, b] −→ R2
ω 7−→ γ(ω) = c 2
2 (ω−senω,1−cosω) .
Uma cicl´oide pode ser obtida, mecanicamente, tomando a trajet´oria que um ponto sobre um c´ırculo descreve no plano `a medida que esse c´ırculo gira sem deslizar sobre uma reta. (Figura 7)
Figura 7: A trajet´oria de um ponto sobre uma roda que gira sem deslizar ´e uma cicl´oide.
3
Uma Propriedade Interessante da Braquist´
ocrona
Figura 8: O tempo de descida deP eP′ a partir do repouso at´e o ponto mais baixo Q ´e o mesmo em uma taut´ocrona.
Com uma dedu¸c˜ao an´aloga a que fizemos no caso da braquist´ocrona, ´e poss´ıvel mostrar que uma taut´ocrona ´e, tamb´em, um arco de cicl´oide que possui o ponto mais baixo de seu tra¸cado.
Iremos demonstrar que uma braquist´ocrona, nas condi¸c˜oes explicadas acima, ´e uma taut´ocrona a partir das equa¸c˜ao param´etricas de uma cicl´oide γ:
γ : [0, π] −→ R2
ω 7−→ a((ω−senω,1−cosω)
(a constante positiva). Notemos que, para ω = 0, temos o ponto (0,0) mais alto da cicl´oide e, para ω = π, temos o ponto (aπ,2a) mais baixo (lembremos que o eixo y est´a orientado para baixo!).
Consideremos as derivadas em rela¸c˜ao a ω:
x′ =a(1−cosω) e y′ =asenω
Considerando que:
(x′)2+ (y′)2 =a2¡
1−2 cosω+ cos2ω+ sen2ω¢= 2a2(1−cosω),
temos:
v = ds dt =
p
2gy; (ver (8))⇒
dt = √ds
2gy
=
q
(dx)2+ (dy)2
√
2gy
=
s
2a2(1−cosω)
2g(a(1−cosω))dω; (pois x ′ = dx
dω e y ′ = dy
dω)
=
r
O tempo de viagem da part´ıcula desde o ponto P do topo (ω= 0) at´e o ponto Q na parte mais baixa (ω =π) da cicl´oide ´e:
T1 =
Z π 0 dt= Z π 0 r a gdω =
r
a
gπ (16)
Consideremos, agora, a part´ıcula em um ponto intermedi´arioP′ da cicl´oide (ω =ω 0). De modo an´alogo ao que fizemos acima:
v =p2g(y−y0),
sendo y0 a ordenada de γ(ω0). Logo:
v = ds dt =
p
2g(y−y0)⇒
dt = p ds
2g(y−y0)
=
q
(dx)2+ (dy)2
p
2g(y−y0)
=
s
2a2(1−cosω)
2g(a(1−cosω)−a(1−cosω0)) dω = r a g r
1−cosω cosω0 −cosω
.
Mas o tempo gasto pela part´ıcula para percorrer a curva do ponto P′ ao ponto mais baixo Q ser´a:
T2 = Z π ω0 dt= Z π ω0 r a g r
1−cosω cosω0−cosω
dω.
Mas:
senω 2 =
r
1−cosω 2 e
cosω 2 =
r
1 + cosω
2 ⇒2 cos 2 ω
2 −1 = cosω
Logo, Z π ω0 r a g r
1−cosω cosω0−cosω
dω= r a g Z π ω0 senω 2 s 1 cos2 ω0
2 −cos2
ω 2 dω = r a g Z π ω0 senω 2 v u u u t 1 cos2ω0
2
1− cos2
ω 2
cos2ω0 2
Fazendo a mudan¸ca de vari´aveis z = cos
ω
2 cosω0
2
, temos:
dz =− 1 2sen
ω
2 cosω0
2
dω ⇒ −2 cos
ω0
2 senω
2
dz =dω.
Logo: Z π ω0 r a g r
1−cosω
cosω0−cosωdω=−
r a g2 Z 0 1 r 1
1−z2dz ⇒
T2 = r
a
gπ. (17)
Comparando (16) e (17),temos que os tempos T1 eT2 de descida das duas part´ıculas s˜ao iguais, como quer´ıamos.
4
Um Exemplo Num´
erico
Fixemos um sistema de coordenadas cartesianas com o eixo y orientado para baixo e o
ponto P = (0,0) e Q = (10,10). Calculemos a constante c 2
2 e o intervalo de varia¸c˜ao do parˆametro ω em (14) e (15).
Temos que as equa¸c˜oes param´etricas da braquist´ocrona s˜ao x= c 2
2 (ω−senω) e y = c2
2 (1−cosω).Logo, temos o seguinte sistema:
10 = c 2
2 (ω−senω)
10 = c 2
2 (1−cosω)
⇒1 = (ω−senω)
(1−cosω)
Resolvendo por m´etodos n´umericos, temos queω = 2,412. Logo,
10 = c 2
2 (1−cos 2,412)⇒ c2
2 =
10
1−cos 2,412 ⇒ c2
2 = 5,7292.
Assim, temos c 2
2 = 5,7292 e o intervalo de varia¸c˜ao de ω ´e de 0 a 2,412. Portanto, as equa¸c˜oes que procuramos s˜ao dadas por:
γ : [0; 2,412] −→ R2
ω 7−→ 5,7292 (ω−senω,1−cosω) .
Figura 9: A curva braquist´ocrona de P = (0,0) a Q= (10,10).
Notemos essa braquist´ocrona n˜ao ´e uma taut´ocrona, pois o “ponto mais baixo” n˜ao pertence `a curva.
5
Um Agradecimento
Os autores s˜ao gratos `a professora Sueli I. R. Costa do Imecc-Unicamppelas conversas e dicas instrutivas a respeito do “problema da braquist´ocrona”.
Referˆ
encias
[1] Boyce, W. E.& Diprima, R. C. Equa¸c˜oes Diferenciais Elementares e Problemas de Valores de Contorno. Trad. Bras. 3a. ed., Rio de Janeiro: LTC, 1999.
[2] Braun, M. Differential Equations and Their Applications.New York: Springer-Verlag; Berlim: Heidelberg, 1978.
[3] Eves, H. T´opicos de Hist´oria da matem´atica para uso em sala de aula. Geometria. Trad. Bras. S˜ao Paulo: Atual, 1992.
[4] Eves, H. Introdu¸c˜ao `a Hist´oria da Matem´atica. Trad. Bras. 3a. ed., Campinas, SP: Editora da Unicamp, 2002.
[5] Hairer, E. & Wanner, G. Analysis by its history. New York: Springer, 1995. [6] Tipler, P. A. F´ısica. v. 1a, Trad. Bras. 2a. ed., Rio de Janeiro: Guanabara Dois,
1990.