André Luis Celere
Teseapresentada à Esola deEngenharia de
São Carlos da Universidade de São Paulo
para a obtenção dotítulo deDoutor em
En-genharia Meânia
Área deConentração: Dinâmia de
Máqui-nas eSistemas
ORIENTADOR:Prof. TitularPaulo Sérgio Varoto
Paraminha grandeinentivadora, queridamãe, Neuza.
Semsuainiiativa eu nãoteriaterminativa...
Ao meupai, Samuel, quehá tempossefoi, mashá tempospermanee.
Édifíilexpressarempalavras minhagratidão. Muitosontribuiramparaqueeste
trabalhofosserealizado.
Aomeuorientador,Prof. PauloSérgioVaroto,quemeonduziupor esteomplexo
proesso deaprendizageme resimento;
Ao Prof. Carlos Dias Maiel, que propsumadireção de suessona fase de maior
desânimo;
AoamigoRobertoBeker,gerentedaEngenhariadeEnsaiosemVodaEMBRAER,
queinentivoue ontribuiuommeu resimento;
ÀEMBRAER, quepossibilitouestaustosapesquisa.
Atodos osquenão estão diretamentemenionados, mas queestão aqui dentrodo
Resumo
Abstrat
1 Introdução 19
1.1 Objetivoe Motivação . . . 19
1.2 Justiativae Relevânia . . . 20
1.3 Contribuiçõesda Tese . . . 21
1.4 Histórioe Avançosda Pesquisano Setor . . . 21
2 Requisitos de Aeronavegabilidade 31 3 Ensaios em Vo - Prátia Atual e Coloação da Tese 37 3.1 HistóriodosEnsaios . . . 37
3.2 DesriçãodasManobras ea PrátiaAtual. . . 38
3.3 Método deValidação Proposto- Tese . . . 47
3.4 Ténia deManobras Sintétias . . . 48
3.4.1 Desriçãoe História . . . 48
3.4.2 Aparato Experimental. . . 49
3.4.3 DeniçãodasTarefas . . . 54
3.5 EsalaPIOR . . . 57
4 Modelagem Analítia 63 4.1 OModelode PilotoHumano . . . 63
4.1.1 ModeloCrossover . . . 65
4.2 Modeloda Planta . . . 73
4.2.1 Interlúdio . . . 73
4.2.2 ModeloLaterodireional . . . 73
4.2.3 Identiação deParâmetrosdaPlanta . . . 75
4.2.3.1 Desriçãodo Modelo . . . 75
4.2.3.2 Método de Identiação doModelo . . . 76
4.2.3.3 Identiaçãodo Modelo . . . 77
5 Simulações em Malha Fehada - Teoria 81 6 Comparação de Sinais Introduzindo o Coneito de Entropia Esta-tístia 87 6.1 Análisede Sinais . . . 88
6.2 Entropia Estatístia . . . 88
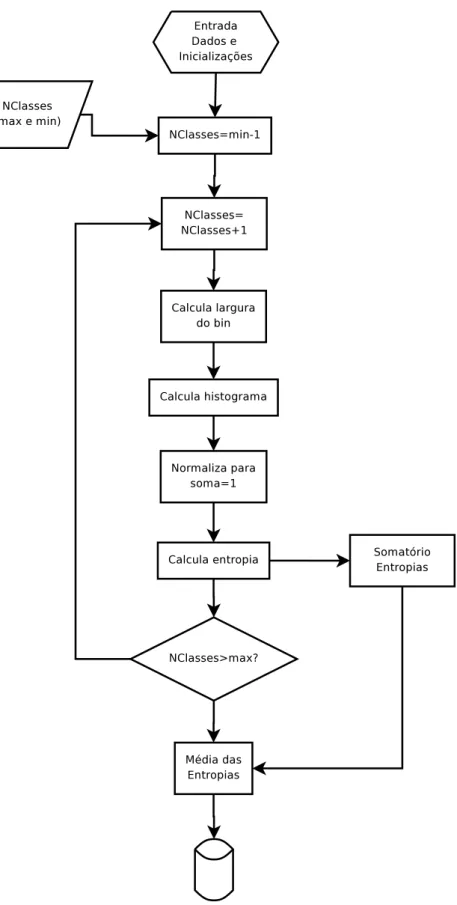
6.3 AlgoritmoUtilizadoparaCálulo daEntropia . . . 91
7 Resultados de Ensaios, Simulações e Análise 97 7.1 Ensaios . . . 97
7.1.1 ConduçãodoEnsaio . . . 99
7.1.2 ConguraçõesEnsaiadase ModelosAjustados . . . 101
7.2 Resultadosdo Cálulo deEntropia . . . 107
7.2.1 Formaçãodo Critério- AnáliseDireta . . . 108
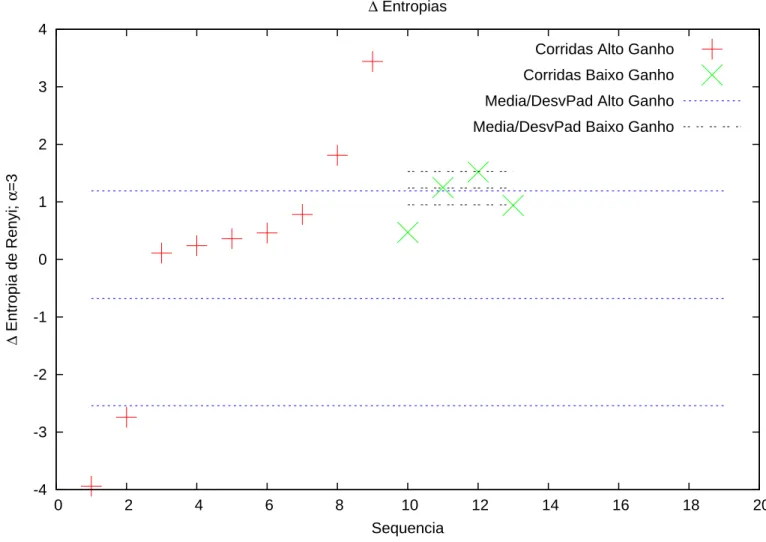
7.2.2 Formaçãodo Critério- AnáliseEstatístia . . . 112
7.2.3 Avaliaçãodo Critério- Utilizandoa AnáliseEstatístia . . . 119
8 Conlusões e Reomendações para Pesquisas Futuras 127 8.1 Conlusões . . . 127
8.2 ReomendaçõesparaImplementação . . . 128
8.3 ReomendaçõesparaPesquisasFuturas . . . 129
Referênias 131
Apêndies
B Gráos dos Resultados 147
C Listagem de Programas 185
C.1 Cálulo daEntropia . . . 185
C.2 Sriptsde Entradade Dados . . . 193
D Flight Test Instrumentation List 199
E Modelo Laterodireional 203
ensaios de PIO. Tese (Doutorado),Esola de Engenhariade São Carlos,Universidade
deSão Paulo, SãoCarlos, 2008.
Um método para avaliação do uso de ganho adequado em ensaios de veriação
de PIO (Pilot Indued Osillations) é apresentado. As Tarefas de Manobra Sintétia
(Syntheti Traking Task) são utilizadas para a demonstração. A teoria é baseada
no oneito de entropia estatístia proveniente da teoria da informação e no modelo
estrutural do piloto humano. O método é apresentado para manobras exeutadas no
eixo lateral e oferee uma medidado ganhohumano utilizado durante a suaexeução
em malha-fehada. Para a modelagem da planta é utilizado modelo blak-box om
equaionamento de espaço de estadose identiação de parâmetros. Dados de ensaios
em vo provenientes de uma aeronave de transporte ertiada FAR-25 sãoutilizados
paramedira razãoentreo tempo gastopelopilotohumanoemumamalhafehada em
posiçãoversus o tempo emumamalha dederivada daposição(roll vs. roll rate). Esta
medidaéproposta omovalidadorada exeuçãoorretado ensaio.
Palavras-have: PIO. Pilot indued osillations. Osilações om piloto no loop.
Malha-fehada. Entropia estatístia. Ensaios em vo. Aeronáutia. Qualidades de
Esola deEngenharia deSão Carlos, Universidadede São Paulo, SãoCarlos, 2008.
Amethod isproposed to verifylosed-loopadequate ighttest piloting gain in PIO
airraftertiation. TheSyntheti TrakingTask PIOighttestisused. Thetheoryis
based on the entropy onept frominformationtheory and on the strutural pilot model
ofthehumanpilot. Themethodispresentedforsingleaxispilottrakingmaneuversand
oers a measure of the human pilot gain employed during its exeution. A blak-box,
state-spae, parameter-identied model is used for the plant. Flight test data from a
FAR-25 transportairraft isused toverifythe theory of howto determine ameasure of
theratiobetweentimespentbythehumanpilotin theerrorloopversusinthe errorrate
loop to ontrol the airraft. This measure isproposed as a test point validation method
for PIOight testing.
Keywords: PIO. Pilot indued osillations. Pilot in the loop osillations.
Closed-loop. Statitial entropy. Syntheti task. Flight test. Aeronautis. Atmospheri ight
Bu
(
t
)
Matriz da equaçãode espaçode estadosCx
(
t
)
Matriz da equaçãode espaçode estadosDu
(
t
)
Matriz da equaçãode espaçode estadosD
α
(
P
z
k
Q
z
)
Entropia relativade Renyiom grauα
D
3
21
Entropia de Renyi de ordem3, aluladaentreossinais 2e 1D
3
31
Entropia de Renyi de ordem3, aluladaentreossinais 3e 1D
(
P
z
k
Q
z
)
Entropia relativa,oudivergêniade Kullbak-Leiblere
(
t
)
Ruído (sinal)G
(
q
)
Matriz de resposta ao impulso(impulse response)Hα
(
z
)
Entropia de RenyiH
(
z
)
Entropia de ShannonK
e
˙
Ganho da malhade derivada doerro domodelo deHessK
c
Ganho da planta ontroladanomodelo de CrossoverKe
Ganho da malhade erro domodelo deHessK
p
Ganho do pilotonomodelo Crossoverlr
Razãode probabilidade(likelihood ratio)N
z
Fatorde argaPz
,Qz
Distribuiçõesde prob.p
(
w
alto
|
x
)
Prob. deumponto deensaio pertenerà lassede altoganho, dado queo evento xoorreup
(
w
alto
)
Prob. deumponto deensaio tersido exeutadoom altoganhop
(
w
baixo
|
x
)
Prob. deumponto deensaio pertenerà lassede baixo ganho, dado queo evento xoorreup
(
wbaixo
)
Prob. deumponto deensaio tersido exeutadoom baixo ganhop
(
x
|
w
alto
)
Prob. deumevento x,dado queo mesmo perteneà lassede altoganhop
(
x
|
w
baixo
)
Prob. deumevento x,dado queo mesmo perteneà lassede baixoganhos Variávelde Laplae
u
(
t
)
Sinal deentradaem umsistemav
(
t
)
Ruído(sinal)w
alto
Classe deseparação dedados (altoganho)w
baixo
Classe deseparação dedados (baixoganho)Y
de
Dinâmiadodisplaynomodelo de HessYpn
Forma emmalha aberta dadinâmia neuromusularY
c
DinâmiadaPlantaYf
Washoutdo sist. neuromusular, devidoà ligaçãoalfa-gamadosmúsulose tendõesda mão
Ym
Umarepresentaçãointerna dosist. deontrolemanualutilizado pelopilotoY
p
Funçãode TransferêniaAproximadado PilotoY
p
l
Lógia pulsativa dosistema nervosoentralY
p
Y
c
Forma Combinaday
(
t
)
Sinal desaída emumsistemaZ
Variávelrandmiaz
Eventoα
ordem daentropia de Renyiβ
Ângulode derrapagemδ
comando
Movimento doineptor∆
D Diferençaentre entropiasγ
Ângulode planeioµ
Médiaω
c
Freqüênia de rossoverdo sistema(modelorossover)ω
freqüêniaφ
Atitude derolamentoσ
Desvio padrãoτe
Atraso total dosistemapiloto+plantaθ
dot
Razãode arfagemA-PC Airplane-pilot oupling
AG Alto Ganho
AOA Ângulo deataque
BG Baixo Ganho
CATII Aproximação por instrumentosommínimosde 100 pés
CDF Funçãodistribuição umulativa(umulative distribution funtion)
fd Computational uid dynamis
D1e D2 Conguraçõesdedeolagem da aeronave ensaiada
FAA Federal aviation administration
FBW Fly-by-wire
FTI Instrumentaçãode ensaios(ight test instrumentation)
IRU Inertial referene unit
LCD Liquid rystaldisplay
LH Lado esquerdo
LVDT Linear variable dierential transformer
MLW Pesomáximode pouso(maximum landing weight)
N1_AC Rotação dorotor primário(fan) deumturboreator
P1 eP2 Conguraçõesdepousoda aeronave ensaiada
PC ProbabilidadeCondiional
PCM Pulse oded modulation
pdf Funçãodensidade deprobabilidade
PFD Primary fntion display
PIO Pilot-indued osillations
PSD Densidade espetral
PSS Rotina deidentiaçãodo Matlab
QDV Qualidade de vo
R.V. Variávelrandmia (random variable)
RH Lado direito
Sinal2 Atitude simulada namalha de erro
Sinal3 Atitude simulada namalha de derivadado erro
Introdução
Aertiaçãode uma aeronave de transporteivil moderna é umaatividade
om-plexa e extensa, requerendo omprovações de requisitos que abrangem desde itens
es-truturais até estudos de onabilidade de sistemas e as onseqüênias de suas falhas.
Neste universo há vários requisitosque têm sua demonstraçãode maneira
determinís-tia,porém hátambém aqueles queexigem umaavaliaçãosubjetiva, espeialmenteda
tripulação deensaio.
Nas últimas duas déadas, há, ada vez mais, eletrnia embarada nas
aerona-ves, visando desde a automação de tarefas a serem exeutadas pela tripulação até a
obtenção de estabilidade artiialparaproblemas aerodinâmiosde resolução ustosa.
Étendênianosprojetos modernosa utilizaçãodeomputadoresparaauxiliaro piloto
na ondução da aeronave, atuando não raramente em malha-fehada, diretamente no
sistemade ontrolede vo.
A veriação da qualidade de vo dessas aeronaves modernas exige maior foo
em fenmenosde aoplamento entre a pilotagem humana, seus sistemas sensoriais e a
aeronave. Esse é oobjetode estudo proposto.
1.1 Objetivo e Motivação
Oobjetivo é apresentarummétodo paravalidar aexeuçãode pontos deensaios
ertiações junto à EMBRAER omo engenheiro de ensaios em vo, espeialmente
omo espeialista(foal point)da áreade ensaiosemqualidadesde vo.
Aexeuçãodetaisensaiosébaseadaemumahipótesefundamentaldequeopiloto
exeutará a tarefa om o mais alto ganho possível, mimetizando uma ondição real
de PIO. A experiênia nas ertiações mostrou que essa hipótese fundamental não é
umprida sempree está sujeita ao próprioelemento subjetivo inerenteao ser humano,
omo suavariação dehumor,ansaço físioemental,dentreoutros fatores.
Ointeresseeavontadedeminimizarainuêniadesseselementossubjetivossobre
osresultadosde ensaio sãoosgrandes motivadores destatese.
1.2 Justiativa e Relevânia
Váriosmétodosforamriadospelaindústriaaolongodosanosparatestaras
quali-dadesdevodasaeronaves,porémopesodejulgaromoeldabalançaseosresultados
estão aeitáveis paratoda a gamade pilotos existentesna operação daaeronave ainda
está só om a tripulação de ensaios. É uma responsabilidade grande e um exeríio
difíil abstrair-se antes, durante e após a realização de um ensaio para, mentalmente,
avaliarseosresultadosobtidosseriamaeitáveisparaaquelesqueutilizarãoaaeronave
na prátia. Uma opção seriaexeutar avaliações múltiplas, om tripulações de ensaio
diversas, obrindo uma diversidade melhor das variações humanas, porém o usto e o
prazo tornam-se proibitivos rapidamente. Justamente por ser esta uma tarefa difíil,
não é raraa neessidadederepetiçãode ensaiosparase "tererteza"doresultado.
Esta é a justiativa para a busa de um método que auxilie a tripulação na
tomadadedeisões,minimizandoaspetossubjetivosetornandoosensaiosmaisrápidos
e eientes.
Tal métodonão teria relevânia se aaviação ivil não estivesse em frano
Apartirdosresultadosapresentados,pode-seonluirqueométodopropostopara
veriarensaiosdePIO,realizadosomganhoinadequado,utilizandoaténiadetarefa
sintétiaéválido. Ométodopoderáreduzirotempodeensaiosearepetiçãodepontos,
gerandoganhosparaaindústria,alémde introduzironeitos daTeoria daInformação
noambientede ertiaçãodeaeronaves.
Há, no entanto, uma neessidade de apliar o método em vários outros enários
(outras aeronaves, tripulações, ongurações, et), para que as onlusões estatístias
tenham maioronabilidade.
1.4 Histório e Avanços da Pesquisa no Setor
Aseguir, umbreve históriodosprimórdiosda aviação ea onstruçãogradual dos
ritériosde aeronavegabilidade.
Aaviaçãoiviliniiou-seom SantosDumont eseuhistóriovoaoredor datorre
Eiel, demonstrando,pela primeiravez,queerapossívelontrolarveíulosaéreos. Em
seguida, já levava passageiros e, pouos anos após, distribuía plantas de seu modelo
Demoiselleparadivulgaraaviaçãoepermitirqueosinteressadostivessemaessoaessa
tenologia,de maneirairrestrita.
Pouos anos depois, a soiedade ivil já ontava om serviços de orreio aéreo e
transporte de passageiros, e, onseqüentemente, aidentes aeronáutios eram notíia
nosjornais.
Muitas eram as falhas iniiais: meteorologia, falhas estruturais, falhas humanas,
falhas de motor (sistemas), e, om o aumento do número de vos e da exposição à
essesrisos,houveumapressãodaopiniãopúbliaparaquefossemdenidos requisitos
mínimosdeaeronavegabilidade. Umdosprimeirosrequisitosdeterminadospelogoverno
ameriano regulava a operação e listava itensdo tipo (UNITED STATESARMY AIR
CORPS,1920):
Nooriginal emInglês:
◦
Never leave the ground with the motor leaking;E atradução emPortuguês:
◦
Não vávoar namáquina anão serque voê esteja onvenido deque elavoará;◦
Não saia dohão omo motorvazando;Éimportanteressaltarque,historiamente,osEstadosUnidossempreestiveramna
vanguarda da utilização do meio aeronáutio e, onseqüentemente, na sua
regulamen-tação. Foino ano de 1926queo primeiro requisitooialfoi publiadosobo título de
AirCommere At-(FEDERALAVIATIONADMINISTRATION,2007a). Nelehavia
asprimeirasexigêniassobreasegurançadasaeronaves,jáomvistas naresente
uti-lizaçãoomerial. Com aresenteutilizaçãodomeioaéreoparaasdiversastransações
omeriais (aí inluído o transporte de passageiros), o governo ameriano publiou o
primeiroonjunto de requisitosparagarantira aeronavegabilidade: oCAR-04 de1936
(BUREAU OF AIR COMMERCE, 1936). Em1938, foi publiadoo Civil Aeronautis
At,riandoagêniaseórgãosreguladoresommaisforçaeresponsabilidade,eemitindo
o primeiroonjunto de requisitos
Já no período pós-segunda grande guerra, houve a emissão dos primeiros ódigos
nos EstadosUnidos: CAR-3 e CAR-4, ontendo osrequisitosmínimos de
aeronavega-bilidade paraa omerialização de aeronaves ivis (CIVIL AERONAUTICS BOARD,
1949), sendoofoo prinipalgarantironabilidadeàestrutura. Nadéadade50,om
aaprovaçãonoongressoamerianodoFederal AviationAt de1958,osrequisitos
evo-luíram paraumonjuntomaismaduro eompleto,omplementados omaexperiênia
dosváriosanosde operaçãodeaeronaveseomaonseqüenteexposiçãoàsintempéries
diárias (FEDERAL AVIATION ADMINISTRATION,1965). As prinipaisdisiplinas
abordadas são:
◦
Desempenho - determinaçãode mínimos aeitáveis, jáom alguns asos de falhaprevistos,omo falhade motor.
◦
Qualidadesde Vo(ouQDV)- determinaçãodosmínimosde estabilidadeeon-trole.
◦
Há, desde então, uma onstante orrida entre o avanço tenológio inorporado
pelos fabriantes e a rapidezda omunidade (por meio das autoridades ertiadoras)
ematualizarosrequisitos. Assim,aertiaçãoivildeaeronavesfoisempreonduzida
omfooprinipalnas4áreasdesritasaima,apresentandoertoatrasoprinipalmente
emrelaçãoàsnovastenologiasempregadasnasaeronavesmodernas.
Nas últimas déadas, o projeto aeronáutio mundial passou por grandes avanços.
Estruturas,propulsão, aerodinâmia e onforto sãoapenas algumasdasáreas que
evo-luíramsigniativamente,masnenhumaseomparaaoavançodaeletrniaembarada.
Umaaeronavemodernapossuihojeinontáveis miroproessadoresa bordo:
omputa-dores de vo, disjuntores virtuais, ontroles de ar-ondiionado, atuadores inteligentes
hegando atéa afeteirasmiroproessadas. Esse fáil aesso à eletrnia possibilitou
uma enorme evolução no automatismo dos sistemas embarados, bem omo a
imple-mentação de omandos de vo eletriamente omandados - FBW, ou (Fly-by-Wire).
Asleis de ontroleiniiaram uma evolução já na déada de 60 om a introdução pela
BoeingdaleiC*(TOBIE;ELLIOT;MALCOLM,1966;FIELD,1993),ehojeestão
im-plementadas em vários modelos de suesso omerial, omo o Airbus A320e o Boeing
777 (FIELD,1995).
Um outro aspeto relevante para projetos modernos é uma série de fatores (ou
requisitos)de projetoque preisam ser levados emonsideração, além dos mínimosde
aeronavegabilidadeestabeleidos pelas autoridades ertiadoras:
◦
onfortointerno;◦
limitaçõesonstrutivas;◦
requisitosextrasde qualidadesde vo;◦
tempo disponívelparaprojeto(timetomarket);◦
limitanteseonmios;◦
eoutros.essa grande gama de requisitos induz a uma espiral de projeto omplexa, om vários
ilos, e que neessita engenharia simultânea para não exeder o tempo para entrada
no merado(time-to-market). Os grandes ilos seiniiam om o anteprojeto, onde o
formatoexternobásio(aerodinâmia)eaonguraçãosãodeterminados,ouongelados
na terminologia da área. Emseguida, prossegue-se om os ensaios emtúnel de vento,
neessários para veriarse asprojeçõesmatemátias(omputational uid dynamis
-fd) de estabilidade e desempenho estão orretas. Em paralelo, avançam estruturas e
sistemas.
Ao términodos ensaiosem túnel,o projeto daslinhasde sistemajá está
razoavel-menteongeladoe,então, prossegue-separaosilosdossistemasemsi. Osomandos
de vo estão aqui inluídos, dando iníio a uma série de estudosem que osrequisitos
dedesempenho,estabilidadeeontroledeverãoseratendidospeloprojeto. Nesteponto
há umamudançano paradigmaoriginal paraos omandosde vo: onde antesas
limi-taçõesonstrutivas do sistemaformavam a barreira para o projeto aerodinâmio e de
omandos, hoje ontroles em malha fehada onseguem eliminá-las, provendo
estabili-dade aparenteaopiloto,mesmoquesemestabilidadeinerente. Essaevoluçãoveioriar
umalaunaentreomodusoperandiprojetadoeaquelerealmenteutilizado,poisos
mé-todostradiionais de análisede qualidadesde vonão levam emonsideraçãoamalha
fehada pilotoaeronave,quetem sidoalvode váriosestudosdasúltimas4déadas.
ParaprojetosFBW,oresultadodesteiloéadeniçãodaestratégiadosomandos
de vo,queé aespinha dorsaldo ontroledaaeronave.
Nota-se que o aumento da perepção da importânia de qualidade, da adeia de
valor e o barateamento dos equipamentos geraram forte onorrênia entre os
prove-dores de serviços aéreos (linhas, harter, arga). Esse é mais um motivo pelo qual os
fabriantes tentam implementar rapidamente os avanços tenológios disponíveis em
suasaeronaves. Emespeial,adisponibilidadeadavezmaiordepoderomputaional
barato tem provoadomudanças de paradigma na onstrução aeronáutia, avançando
por áreasnão obertas pelos requisitosde aeronavegabilidade.
Esta análise rápida tenta entender omo a ertiação ivil de aeronaves tem se
ajustado (ou não) à tenologia de omandos de vo FBW, espeialmente no toante
Naépoa,osproblemasassoiadosaessamudançadeparadigmaemergiramdemaneira
ontundenteom eventos de PIO, e o volume de estudos iniiadosainda nadéada de
60 em aeronaves om omandos hidráulios (T-38A, X-15) (MCRUER, 1995) foram
fortementeinrementados. Mas torna-seneessário denirPIOom maispreisão. Há
inúmeras referênias que denem esse fenmeno, porém, dentre as pesquisadas, uma
dasmelhores deniçõesé:
PIOsãoosilaçõessustentadasounão-ontroláveisresultantesdeumaação
diretadopilotoparaontrolaraaeronave (DEPARTMENTOFDEFENSE
INTERFACESTANDARD, 1990).
Há deniçõesmaisreentes (MITCHELL;KLYDE, 2008), porém são, emgeral,
varia-çõessobrea idéia entraljá apresentadaanteriormente.
Outrofator importanteparaaoorrênia dofenmeno PIOé apresençada tríade
piloto-veíulo-gatilho observada em várias referênias. Um PIO somente irá oorrer
emumsistema operando emmalha fehada (pilot+veíulo)e quando houverumfator
surpresa que desenadeie (gatilho) um modo de pilotagem agressivo (alto ganho). O
termo gatilho também é referido na literatura omo abismo (li) ou fator surpresa
startle fator) (CALSPAN,1998; KLYDE; MITCHELL, 2005).
Vários estudos foram realizados para identiar as ausas e denir ritérios para
projeto,demaneiraatentargarantirumainibiçãodofenmeno(ANANTHKRISHNAN;
SHAH; UNNIKRISHNAN, 2004; COOPER; HARPER, 1969; MCRUER;KRENDEL,
1974;MCRUER;MYERS,1988). Oumedetaisestudosestánasdeniçõesderitérios
de projeto, omo a próprianorma MIL1797Ae os ritériosde Phase Delay Bandwidth
(HOH; MITCHELL; HODGKINSON, 1982), Gibson (GIBSON, 1999), Neil-Smith
(NEAL; ROGERS, 1970), Smith-Geddes (SMITH, 1993), dentre outros. Como o foo
eram osaças de últimageração (de adaépoa), todo o esforço foionentrado neste
tipo de aeronave, omsuas peuliaridades de operação. Uma ótimaanálise dosprós e
ontrasde adaritériofoiapresentadapor (GAUTREY, 1998).
OsdadosdosmaisvariadosexperimentosrealizadospelaNASAsãotodos
lar (CHIGNELL;HANCOCK, 1986;DEY, 1972; HESS,2003; KELLY; KLAPP,1986;
JEX; ALLEN; MAGDALENO,1972; REPA; ALBERS; POTVIN,1972).
Transportandoessehistóriodosestudosvoltadosàáreamilitarparaaaviaçãoivil,
veria-sequenãoforamrealizadasmaispesquisasparadeterminarritériosdeprojeto
que pudessem guiar o projeto de novas aeronaves, permitindoum mínimo de robustez
a essefenmeno. Aleituraompleta dosrequisitosdeaeronavegabilidaderevelaafalta
deumtratamentoespeíorelaionadoaPIOFederalAviationRegulations-FARpart
25 (FEDERAL AVIATION ADMINISTRATION,1965). Porém,há evidênias de que
essa tenologia apliada a aeronaves de transporte ivis não está imune aos mesmos
problemas enfrentadospelosaças. Um exemplopode ser veriadonaaeronave C-17,
que, apesardesermilitar, ébastanteanálogaàsaeronavesdetransporteivil(oC-17 é
umaaeronavedetransportedeargasetropas)(WELTZ;SHWEYK;MURRAY,2007).
Outro exemplo é oesforço dispendidopeloDepartamento de Transporte(DoT)
ameri-ano, promovendo estudos quanto às qualidade de vos de aeronavesom estabilidade
relaxada (HOH;MITCHELL, 1982;MCRUER;MYERS,1982).
Resumidamente, pode-sedizer queavariabilidade dofatorhumanoéde talmonta
queinviabilizaumritériodeprojetoapazdedelararumaaeronavelivredePIO(PIO
Free). No máximo, pode-se delarar que a aeronave não é susetível a PIO (non PIO
prone). Exemplosdeaeronavesivis quepreseniaram algumtipode PIOsãooMD-11
(NATIONALTRANSPORTATION SAFETYBOARD,1993), A320; 321,Boeing 767;
777 e Dassault Falon 900, entre outros (FIELD, 1995; MCRUER, 1995). A maneira
de minimizar a probabilidade de oorrênia de PIOs em aeronaves ivis é apliar, em
seusprojetos,ritériosdesenvolvidosparaaeronavesmilitares,mesmoomasdistorções
provenientes deempregos tãodiferentes.
Novamente, itando o histório, as aeronaves ivis modernas e providasdesse tipo
de tenologia tiveram suas bases de ertiação normais aresentadas de ondições
espeiais, ou Issue Papers omo esses doumentos são refereniados pelo FAA - F
ede-ral Aviation Administration (DEPARTMENT OF TRANSPORTATION, 2007a). São
doumentos que oloam requisitos de aeronavegabilidade adiionaisao projeto sendo
ertiado, devidoa alguma araterístia inovadora - novel feature - e que, no
enten-dimento da autoridade ertiadora, não está ontemplada nosrequisitos omuns. As
sus-AEROESPACIAL,2002). Porémnão háonsensosobreo método parasedelararque
umprojeto novo tem aeronavegabilidadesuienteparaapresentaruma probabilidade
extremamenteremotadeenontrareventos dePIOao longoda suavida útil.
Aprátiaatualparaseveriaroatendimentoaosrequisitosdeaeronavegabilidade
deaeronavesdetransportepúbliodesritosnanormadeertiação(FEDERAL
AVI-ATIONADMINISTRATION,1965)éaadoçãodoguiadeensaiospubliadopelas
pró-priasautoridadesreguladorasAC-25-7A(FEDERALAVIATIONADMINISTRATION,
1999). No entanto, onforme explanado aima, este onjunto requisito+guia é muito
bomquandosetratadasquatroáreasbásias(desempenho,qualidadedevo,sistemas
eestruturas). Uma análisemaisdetalhadadeles, espeialmentedo 25.143(a)e (b),
de-monstraumestadoinipientenotoanteaoforneimentodeumguiaeaznaondução
deensaiosomoobjetivodedemonstrarumprimentodeumrequisitoquetambémnão
éespeíoenemobjetivosobreoproblemadaexistêniadePIOs. Aarmativaaseguir
é um exemplo: "There are no ertiation tests or objetive measures to speially
assess the airplane's suseptibility to pilot overontrol or out-of-phase indued pith
osillations[...℄", ou emportuguês"Nãoháensaios de ertiaçãooumedidas
objeti-vasparaavaliarespeiamentea suseptibilidadede umaaeronave asobreontroleou
osilaçõesfora-de-fase induzidas emarfagem[...℄"(NATIONALTRANSPORTATION
SAFETYBOARD,1993).
Dessa maneira, torna-se impresindível a realização de ensaios em vo,
prinipal-mentepelafaltadeummodelosuientementeompletoparaapturarasaraterístias
humanas nas várias fases de vo e, assim, onseguir demonstrar a aeronavegabilidade
apenas por análise (CALSPAN, 1998; MCRUER, 1995). Além do mais, há um forte
elemento subjetivonessa avaliação, quelevaasautoridadesertiadorasa terema
ne-essidadedepartiiparem darealizaçãodosensaiosenãoaeitaremsubstaniaçõesque
utilizem modelagem matemátia. No máximo, esse tipo de modelagem e apliação de
ritérioslevaapenasaumareduçãodamatrizdepontosdeensaiosemvo(EMPRESA
BRASILEIRADE AERONÁUTICA, 2005).
As reomendações modernas sobre as ténias de ensaio para uma ampanha de
veriaçãoquantoàsuseptibilidadeaPIOestabeleemmanobrasdinâmiasomo
ADMINISTRATION, 1999). Foiobservado na literatura umforte direionamento das
pesquisasparaa áreamilitar.
Éimportanteressaltarqueasaeronavesivistêmumautilizaçãofundamentalmente
diferente daquela das aeronaves de ombate (em espeial as aeronaves de transporte
FAR 25), porém os eventos de PIO relatados e, prinipalmente o piloto humano, são
análogos. Desta forma, introduzindo-se modiações nas manobras propostas para os
ensaios quetentam evideniara predisposiçãode umaaeronave a PIO,pode-se hegar
aumonjuntoque, aomesmotempo,proporioneasexitações(gatilhos)etambémse
assemelhemaisaoempregoivil. Essasmodiaçõesinluemadequaçãodoonteúdode
freqüênia,dasamplitudesedastarefasexitadoras,ontandoomníveisadequadosdas
fases deaquisição(grossaquisition) eontroleno(ne traking). Dentreasmanobras
propostas, as que melhor demonstraram potenial resultado para a ertiação ivil
são opousode preisão eas tarefassintétias (MITCHELL;KLYDE, 2004;SHAFER;
STEINMETZ, 2001).
Por outrolado, amodelagemdopiloto exeutandoumatarefa éobjeto deestudos
há pelo menos 50 anos, porém, devido ao alto potenial do ser humano de se adaptar
e utilizar informações periférias, omo o sistema vestibular, visão periféria, sistema
olfativo, tato, et paramodiar a estratégiade ontrole, ummodelo únio ainda não
foiformulado. Váriosmodelosespeíosestão disponíveis,destaando-seospropostos
por (MCRUER;JEX, 1967; MCRUER;KRENDEL, 1974; MCRUER;MYERS, 1988)
e por (HESS, 1981;HESS; STOUT,1997).
Umdosprinipaisé(MCRUER;GRAHAM,1964),que iniiaaspubliaçõessobre
modelos matemátiosdo omportamento humano emontrole manual. Na mesma
dé-adainiiam-seosestudossobremodelosnão-lineares,interferênias,inuêniasde
múl-tiploseixoseariaçãodooneitoderemnant 1
(MCRUER;JEX,1967;SWALLWOOD,
1967; WIERWILLE; CAGN; KNIGHT, 1967; TODOSIEV, 1967). Vale ressaltar que
esses estudos foram movidos pela orrida espaial russo-ameriana da déada de 60.
Já na déada de 70, os estudos de inuênia de mostradores/telas (displays) são
ini-1
remnant é o oneito riado nadéada de 60. Enquanto pesquisando modelos matemátios do
piloto humano,MRuer identiouque o pilotohumanomudava deestratégia onforme adinâmia
da planta (veja detalhes noapítulo 4.1.1) paraformar, junto oma planta, um modeloinvariante.
(MCRUER; KRENDEL, 1974) sobre o omportamento de sistemas operados por
hu-manos. Esta publiação é onsiderada uma das melhores sobre modelos matemátios
depilotos humanos.
A déada de 80 já traz estudosmais apliados a asos prátios, omo os asos do
nibus espaial (POWERS, 1984; SMITH, 1981). Foi também publiadoestudo sobre
uso de manobras disretas (HEFFLEY, 1982), marando uma quebra om os estudos
atéentãovigentes,queusavammanobrasontínuas;Hessintroduzomodeloestrutural
om duas malhas (HESS, 1978, 1980, 1981) e abre espaço para estudos dos aspetos
siológios do ontrole (JOHNSTON; MCRUER, 1986). Um dos primeiros estudos
brasileirossobreoassuntodemodelagemdepilotossurgetambém(PEDREIRO,1989).
E por último, a déada de 90 e 2000 tem algumas publiações que fazem apanhados
geraissobre as teorias sobre PIO(MCRUER,1995; MCRUER;MYERS, 1988)e uma
exelenteoletânea do estadoda arte publiadapela NASA(SHAFER;STEINMETZ,
2001).
Dosmodelospesquisados,oesolhidoparaserutilizadonestateseéoúltimoitado:
o modelo estrutural de Hess, que apresenta duas variáveis prinipais nas malhas de
ontrole.
Essemodelofoiextensamenteestudadoe demonstrouque háumaalteração na
es-tratégiadeontrolequandooorreatransiçãodeumasituaçãoonfortáveldepilotagem
paraoutra onde há onsiderávelatraso de fase entre a variávelque está sendo
ontro-ladaeosetpointdoontrolador,queno asoé opiloto. Iniialmente,apenasoeixo de
ontrolelateral seráestudado e,portanto, essasvariáveisreferem-se aoângulo de
rola-mento da aeronave e ao ângulo de rolamento que o piloto deseja manter (ou ir para).
Ateoriapreoniza queaestratégia deontrolemigrade umontroleangular(posição,
ouroll) paraveloidade angular (veloidade,ou roll rate) (JAGACINSKI; HAH,1988;
ROBBINS, 1999).
É baseando-se nesta teoria que será proposta uma tese para determinar em qual
mododeontroleopilotoestáoperandoduranteaexeuçãodeensaiosemvoutilizando
aténiade manobra sintétia.
para validar o método proposto. Iniialmente será feita a identiação de parâmetros
da aeronave (planta) em ada ondição de vo ensaiada. Os dados da exeução de
tarefassintétias realizadasemrolamentoserão utilizadosomoentradaemsimulações
emmalhafehadaomomodeloestruturalparaopilotohumanopropostoporHess. Os
resultadosdassimulaçõesserãoomparadosomosdadosdeensaioutilizandoentropia
Requisit os de Aeronavegabilidade
Conformeoloadono apítulo 1.4, osrequisitos de aeronavegabilidade para
aero-navesivissão bastantegenérios e nãotratam espeiamentedo assuntoPIO.
Orequisito doFAR25 (FEDERALAVIATIONADMINISTRATION, 1965),e seu
equivalenteeuropeu CS25 (EUROPEAN AVIATION SAFETY AGENCY, 2003), que
abrange questões de ontrole é o 25.143, porém sem menção espeía a PIO's. É
feita, a seguir, umaleitura rítia dosrequisitose seus doumentos anexos, sendoque
o anexo A ontém uma transrição dos trehos importantes para referênia rápida do
leitor. É inevitável traçar uma omparação om os requisitos militares, que sempre
deram atenção aos fenmenos relaionados à qualidades de vo, também porque as
pesquisas nessa área sempre foram enabeçadas por órgãos governamentais busando
soluionardiuldades relaionadas à linha de frente do desenvolvimento aeronáutio.
Houve uma evolução da ompreensãoe onseqüentemente dos requisitos de qualidade
de vo(MITCHELL et al.,2004), e autilização de análises om sistemas equivalentes
foitambémtestadapelaindústriamilitar(HODGKINSON,2005),análiseestapresente
hátemposemprojetosmilitaresporémpououtilizada atéhojeem projetos ivis.
O foo do 25.143 é uma denição dos mínimos exigidos para a ontrolabilidade
e a manobrabilidade que a aeronave deve exibir em adafase de vo, denida de
ma-neira genéria para abranger justamente qualquer aeronave de transporte omerial,
de qualquer tamanho e onguração. E, por ser tãoabrangente, o requisito delega a
avaliaçãoàtripulaçãodeensaio. Essadelegaçãotornaaavaliaçãosubjetivapara
força exessiva ou alerta exessivo do piloto e sem exederos limites de arga-
exep-tional pilotingskill, alertness,or strength,and withoutdangerof exeeding theairplane
limit-loadfator
Não há qualquer menção espeía à problemátia do ontroleem malha fehada,
sendo que há sugestão explíita de alguns autores, omo por exemplo (FIELD, 1995;
GAUTREY, 1998), para uma revisão dos requisitos de maneira a inorporar aspetos
modernos de ontrole. Via de regra, os organismos ertiadores se atêm ao fato de
o requisito delarar omomandatório que a aeronave seja ontrolávele manobrável de
maneira segura (safely ontrollable and maneuverable) e, desta forma, interpretam o
requisito omo abrangente o suiente para demandar ensaios que omprovem que o
tiponãoé suseptívelaPIO(non-PIO prone) (tipo - outypeemInglês -refere-se à
aeronave sendoertiada).
Comoqualquernorma,oFAR-25éabrangente,seuonteúdoépassívelde
interpre-tação e, portanto, os resultados de suas demonstrações são interpretados de maneiras
diferentes por pessoasdiferentes. Faz parte danaturezahumana. Porém, viade regra,
interpretaçõesmaisrígidas provoam efeitoseonmiosbastantepronuniadosnos
fa-briantes. Espeialmentena fasedeertiaçãodeumaaeronave,queé aúltimaetapa
antesdoiníiodasentregasparaoslientes. Éo pontona linhadotempoondea soma
do investimento parao desenvolvimento ompleto é maior, portanto dias de atraso no
iníio dasentregasaarretamperdasnaneiras onsideráveis.
Visando equalizar os ustos de ertiação entre fabriantes e harmonizar as
in-terpretações dos requisitos, é publiado um guia ontendo meios para demonstrar os
requisitos(oshamadosmeansof omplianeou MOC)pré-aeitos,expliaçõesde
on-diçõesmais rítias e,em alguns asos, a motivaçãodo requisito. Normalmente, esses
guias sãoutilizados pelos fabriantes para poupar tempo e eliminar um pouo o fator
interpretativodafasedeertiação. Porém,paraertiaçõesFAR 25,aparte
espeí-a de PIOnão eraontemplada,em seurespetivoguia de ensaiosatésuapenúltima
edição,omquaisquerinterpretaçõesoumeiospré-aeitosdedemonstraçãodorequisito
atéa última revisão.
Visandoeslareerumpouoaomunidadeetambémtentarpadronizarosensaios,
fabriante liberdade para apresentar novas idéias e métodos para demonstrar o
um-primento om os requisitos. Nessa revisão, foi inluído o 20. GENERAL - 25.143
setion d, que trata espeiamente de ensaios de PIO (ouA-PC Airplane-Pilot
Cou-plingnanomenlaturautilizada naépoa). Antesdeemitir essarevisão,foipromovido
umdebateomaomunidadeparatentaraglutinarsobummesmodoumentoasvárias
linhasde pesquisaesuasdiferentesvisõessobreoassunto. Partiiparamdasdisussões
representantes da indústria,dosorganismos ertiadores e de algumasinstituiçõesde
pesquisa, sendoaprinipal pergunta no debate:
Comotestarumanova aeronavequanto àsuseptibilidade aPIO?
Otextoresultantereonhee que asaeronavesmodernas podem ser suseptíveis a
PIO- 1 (a)(i) - Ahistória de eventosem serviçoindia queaeronavesde transporte
modernas podem ser suseptíveis a aoplamento aeronavepiloto (A-PC ou PIO) sob
ertasondiçõesoperaionaise não atenderiamàs intenções dorequisito. - e denea
sua oorrênia lássia omo sendo uma resposta defasada de 180 graus em relação
ao omando do piloto. Reonhee, também, que os requisitosnão ontemplam nem a
deniçãoenemaneessidadeexplíitadedemonstraçãodeaeronavegabilidadeom
re-laçãoaesteaspeto;queatéentãoestavamsendofeitosquaseexlusivamenteatravésde
ensaiosemmalha aberta -1 (a)(iv)oumprimento somenteomosrequisitos
quan-titativos,emmalha aberta(pilotoforadoloop)não garantequeosníveis dequalidade
devo sejamatingidos.
Antes de desrever os ensaios sugeridos para a demonstração de
aeronavegabili-dade, o doumento faz algumas onsiderações espeiais, dentre as quais destaa-se:
ada programa de ensaio deverá ser desenhado espeiamente para o Tipo que está
sendo ertiado. E sugestões para programas espeíos de ensaio visando veriar
a suseptibilidade a PIO são tema de publiações reentes, omo (GAUTREY, 1997;
MITCHELL; KLYDE, 2005), onde é proposto que sejafeita uma quebra de losoa,
inluindo ensaios espeíos paraavaliaçãode PIO em programas de desenvolvimento
futuro e denindo novosritérios paraos aspetos de qualidadesde vo de aeronaves
lidade é a exeução de tarefas em malha fehada. Essa é a prinipal ontribuição do
doumento,poisreonhee sero modo depilotagem emqueo fenmeno oorre.
Reo-menda,demaneirageral,queaexeuçãodastarefasnãosejaatreladaaumamedidade
desempenho(porexemplo: porentagemdeaertodatarefa);queoprogramadeensaios
sejaprojetadoespeiamenteparaadaaeronave;e queastarefassejambaseadasem
situações operaionais, manobras de ensaios, ou diuldades em serviços que tenham
produzido eventos de PIO. Reomenda-se também que tenham araterístias em
o-mumomesseseventosesirvamparaevideniaraspetosdiferentesde quaisqueráreas
problemátiasdePIOquepossamexistir. Enm,éumatarefaperfeitaparaevideniar
PIO's. Porémnãoé forneidaafórmulaparasuariação,apenasseusrequisitos. Essas
exigênias ontribuíram para uma diminuição da redibilidade do guia na indústria,
gerando a neessidade de riação, por parte de ada fabriante, de novos meios para
demonstraros requisitos. Ouseja, a eáiado guianão atingiuníveis adequados, e o
problema dainterpretaçãovoltou.
Odoumentoainda faz sugestõesespeíassobre ouso detarefassintétias,
on-siderando que as seqüênias devam ter os omandos de rolamento e arfagem omo
ombinaçõesdedegrauserampas,eseremlongaseomplexasosuienteparaopiloto
nãoaprendereanteiparosomandos(aprendizado). Ofatoraprendizadojáhaviasido
identiado omo importante desde a déada de 60 (PREYSS; MEIRY, 1967), sendo
o objetivo de eliminar essa familiaridade manter o ganho do piloto de ensaios alto e
afastar o risode ompensação inadvertentedurantea exeuçãoda tarefa.
O esvaziamento na utilização direta do guia pela indústria nas demonstrações
FAR25 25.143 ontinuou ausando debate, e a própria autoridade ertiadora (no
aso, oFAAameriano)não éelna apliaçãodospreeitosdoguiadeensaioseaeita
(até fomenta) disussões a respeito de alternativas para demonstração de tendênias
a PIO. As primeiras disussões oorreram em 1996 no workshop "Calspan PIO Fly
Shop", de que partiiparam representantes de vários esritórios do FAA nos Estados
Unidos (osesritóriossãoregionais). Oworkshopreomendouaospilotos ertiadores
do FAA treinamento om uma parte prátia na aeronave de estabilidade variável da
CALSPAN. As primeiras sessões oorreram em 1998, de onde são itados exertos da
publiação brieng paper 1
:
serdesenvolvidopeloFAA.A suseptibilidadeaPIOsomentepodeser
ava-liadapor pilotosde ensaioemalto ganho,i.e., voandotarefasdemandantes
degrandeonentraçãoe ontrolepreiso operaromaltoganhoemum
ambienteontroladoexigeprátia deensaios (CALSPAN,1999).
Foi publiado um livro (NATIONAL RESEARCH COUNCIL, 1997) ontendo os
oneitos disutidos neste workshop, que é bastante ilustrativo sobre o assunto PIO.
Foram realizadas novas disussões aera do tema, ulminando om outro workshop
promovido pela empresa ameriana CALSPAN, entre 15 e 19 de novembro de 1999
(CALSPAN, 1999). Vários oneitos foram revisitados, e uma revisão da proposta
apresentadaporMelRogers(doumento FWP599-3)omorevisão daAC25-7A,seção
3, parágrafo 20 (d) foi onsensada. Porém, o proesso não evoluiu, provavelmente
de-vidoàbaixa demandadaindústria,quepassavaporumperíodoemquenovosprojetos
omtenologia FBWestavam apenas emestudo preliminar. Dessamaneira, o guiade
ensaios já publiadoprevaleeu omo únio doumento oiala orientar a ertiação
ivilno toanteaPIO. Como passardosanos,a adaprojetode tiponovo,osdebates
aera desse tema revelam que o assunto realmente não ou adequadamente
delimi-tado no guia de ensaios e que há uma neessidade de omplementação, efetuada por
meio deregrasespeiais(speialonditions). Inlusive omsugestõesde ensaios
(MIT-CHELL;KLYDE,2005),ereforço nasugestãodetreinamento dospilotosertiadores
(A'HARRAH, 2001). Infelizmente, essas regras espeiais são restritas para ada tipo
(paraadaprojetonovo) enão sãopubliadasintegralmente. Somenteasformasnais
sãopúblias, por exemplo,(DEPARTMENTOFTRANSPORTATION,2007a,2007b).
Torna-se, portanto, onheimento e diferenial de merado, para ada fabriante de
aeronaves,envolver-seemdebatesomautoridadesertiadorassobreessetemae
pro-por ensaiosqueontemplem defatoumaveriaçãosobreasuseptibilidade aPIOdo
tipo. OestadoatualdoavançodosregulamentosnessaáreaéumprojetodoFAA
ame-riano intitulado Software Digital Systems Safety Projet, que reonhee a diuldade
deavaliarasuseptibilidade a PIOeestuda meiosparaavaliaressasaraterístias:
AhistóriadeprojetosFBW,ertiaçãoeoperaçãoemserviçomostraomo
enve-podem ser enontrados (FIELD, 1995). O resultado tem sido (FEDERAL
AVIATIONADMINISTRATION, 2007B):
1. SuseptibilidadeaPIO,partiularmenteduranteosprimeirosanosdos
programas FBW;
2. Interaçãoadversa entre tarefas normais de ontrolee funções de
pro-teção deenvelope.
Esta tarefa busa, primeiro, doumentar as lições aprendidas durante
pro-gramasanterioresde FBWnessa áreae depois identiar:
◦
falhas nos requisitosde qualidades de vo para métodos de projeto eavaliação que preisam ser veriados (e endereçados em programas
subseqüentes);
◦
guiasimportantesdeprojetopreliminareavaliaçõesquepossamajudardiuldades de ertiação ustosas e demoradas, enontradas
tardia-mentenoprojetoouna entradaemserviços.
O futuro dos requisitos ertamente deverá lançar algum tipo de disussão a respeito
do tema, haja vista o onstanteaumento do grau de automação na abine dosaviões.
Os tiposmais reentes a reeberem ertiação e terem que demonstrarumprimento
om ondições espeiais foram o Dassault Falon 7X, que tem seu FBW derivado do
aça Rafale, o Airbus A380e o Gulfstream G650 (DEPARTMENTOF
TRANSPOR-TATION, 2007b, 2006). Projetos ainda não ertiados, omo o Boeing 787, também
inorporam tenologia FBWe estão sujeitos àsondiçõesespeiais - (DEPARTMENT
Ensai os em Vo - Prátia Atual e
Coloação da Tese
3.1 Histório dos Ensaios
Aevoluçãorápidadossistemasembarados,onformedesritonoapítulo1.4,
pro-piiou um vazio no atálogo oial (guia de ensaios) de manobras de ensaios em vo
para veriação da suseptibilidade a PIO. De erta maneira, veria-se uma
evolu-çãotambémlenta dasténias de ensaios, porém signiativamente maisrápida quea
evolução dosrequisitosdeaeronavegabilidade.
AspesquisasporsoluçõesquepudessemdesvendarpossíveisPIOsnafasede
desen-volvimento(tantoemritériosdeprojetoquantoemritériosprátios)avançaramquase
queexlusivamentepor fomento dasagêniasgovernamentais apesquisasmilitares.
Historiamente, essas pesquisas provenientes da área militar migraram mais
len-tamentepara a área ivil devido ao alto usto envolvido em validá-las para aeronaves
intrinseamentediferentes(umaçaversusumaaeronavedetransportedepassageiros)
e à lentidão da evolução dos requisitos de aeronavegabilidade, que seria, sem dúvida,
o prinipal motivador para o avanço das pesquisas na indústria. Dessa maneira, para
adainstante no tempo, há um atraso pratiamente onstanteentre o graudo avanço
Analisando o históriodos ensaiosem vo para permitir averiaçãoda
susepti-bilidade a PIO de aeronavesivis, veria-se este atraso, que pode ser visto na tabela
3.1, onde é apresentadaessaevoluçãodasténias de ensaio.
3.2 Desrição das Manobras e a Prátia Atual
A prátia atual de ensaios em vo para veriação de PIO em aeronaves ivis
está alada, onforme já exposto, na experiênia proveniente das pesquisas militares
que migraram para este setor e que foram adaptadas para se adequarem aos tipos de
aeronave que o merado ivil utiliza. Além disso, vários estudos já demonstraram a
neessidadede desenhar tarefas espeíaspara testarsistemas FBW- (FIELD, 1995;
GAUTREY, 1998). A seguir, as prinipais manobras utilizadas para ertiação de
aeronavesivisserãobrevementedesritasemordemresentedeaordoomograude
risoparaarealização. Ograuderisoéanalisadolevando-seemontaaprobabilidade
de umaidenteausadoduranteosensaios por três motivosprinipais:
1. Falha dealgum sistemada aeronavedurantea exeuçãodo ponto de ensaio;
2. Erro dopilotodevidoà diuldadeinerenteà exeuçãodamanobra;
3. Expansãoinadvertidado envelope devo.
Desses três motivos, osdois primeiros são os prinipais fatores; haja vista a premissa
que a realização de um ensaio para a veriação de PIO oorre após a abertura de
envelopeda aeronavea sertestada.
Asprinipaismanobras são:
◦
Simulação omPiloto- basexaou basemóvelOsmaisvariadostiposdesimuladores(desdePCsatésimuladoresommovimento
ompleto da abine (full motion simulators) são utilizados para fazer avaliações
do sistema onjugadopiloto-aeronave durante o desenvolvimento de umprojeto.
Basiamente, são voadas missões, de maneira a permitir uma avaliação rápida,
barata esem riso. Geralmenteiniia-sea utilizaçãodesimuladores embasexa
Tabela3.1: EvoluçãodasTéniasde Ensaio paraVeriaçãode PIO
...Década »»
60 70 80 90 2000 Pesq.Militar
Vôos a baixa altura
XTarefas de captura
X X X X XVôos em formatura
X X X X XPouso com desvio lat.*
X X X XSimulação com piloto
X X X XSimulação em vôo
X X X XTarefas sintéticas
X X X XEns. ivis
Vôos a baixa altura
X XTarefas de captura
X X X XVôos em formatura
X XPouso com desvio lat.
X XSimulação com piloto
X X X XSimulação em vôo
X X XTarefas sintéticas
X XReq.
aeronavg.
Vôos a baixa altura
Tarefas de captura
X XVôos em formatura
Pouso com desvio lat.
Simulação com piloto
Simulação em vôo
Tarefas sintéticas
X*pousoomdesvio lateral,ouOsetlanding
utilizados simuladores ada vez mais sostiados, hegando a um equipamento
om base móvel somente nas últimas etapas. Cada etapa tem seu valor no
de-senvolvimento paraeliminar erros de projetoe omo aumento de omplexidade
dossimuladores, busa-se melhorara preisão da modelagem, ulminando oma
integraçãoentreperepçõesvisuaisdiretas,visuaisperifériasesensoriais de
mo-vimento nossimuladores de base móvel. Estes possuem grande diferenial sobre
os simuladores de base xa, tanto onstrutivo e de engenharia omo de
resul-tados. Um dos problemas das simulações é que há, nas primeiras fases de um
projeto, umafaltade delidadeentreomodelo matemátioda aeronave (planta)
e a aeronave emsi, prinipalmente devidoà inorreção dos dadosaerodinâmios
disponíveis. Outro problema é a falta de aelerações no sistema sensorial do
pi-loto,provoandoreações(ontrole)duranteaexeuçãodasmanobrasquenãotêm
boa orrelação om a realidade. Prinipalmente em situaçõesextremas, quando
umPIOoorreria. Os simuladoressão ótimasferramentasparaveriargrandes
no simulador,não signiaque nãoapareerána aeronave. 1
◦
Tarefasde CapturaSãoapturasdeproa,atitude-arfagem(
θ
)erolamento(φ
),ângulodeplaneio(γ
),ângulodeataque(
α
)eapturasdefatordearga(N
z
)omandadasabruptamenteapartirdeumaondição estabilizadaeompensada,omempregodealtoganho.
Podem ser exeutadas em simuladores durante os estágios iniiais de avaliação
de um projeto novo, mas é durante ensaios em vo que apresentam resultados
satisfatórios. Geralmenteexeutadasemaltitudesegura(longedohão)eporisso
sãodegrandeaeitaçãoentreasautoridadesertiadoras. Porémsãobempouo
eazes em desvendar tendênias a PIO, uma vez que sua exeução apresenta
resultados apenas para a fase de aptura de umatarefa em malha fehada e dá,
portanto, somente uma impressãogeral sobre asqualidades de vo da aeronave.
Umexemplo dosresultadosdessa manobra podeser vistona gura3.1.
-10
-5
0
5
49665
49670
49675
49680
49685
49690
49695
49700
49705
-10
-5
0
5
Atitude (deg) e Pos. Comando (deg)
Derivada da Atitude (deg/s)
tempo (s)
Captura de Arfagem
Atitude (
θ
)
Derivada da Atitude (
θ
dot
)
Comando (
δ
comando
)
Figura3.1: ManobradeCapturadeAtitudedeArfagem-Amanobraébastantesimples:
iniia-se om uma atitude estabilizada, em vo reto e nivelado, e busa-se estabilizar
em umanova atitudeomaisrapidamentepossível.
1
◦
Este ensaio requer uma aeronave hospedeira om araterístias aerodinâmias
muitobemonheidas. Alémdisso, eladeve seraltamentemodiada paratera
apaidadedeserviromohospedeiradeummodelomatemátio. Aidéiaéquese
possater essaaeronavehospedeira ontroladapor omputador,queexeutaduas
tarefas: paraadaentrada (input) feita pelo piloto, é alulada aresposta quea
aeronave hospedeira daria; então a essa resposta é somado um omando oposto,
de maneira a anulá-la. Em seguida, essa entrada do piloto é simulada através
de modelo matemátio do avião que se está querendo simular. Esse método foi
iniialmenteempregadopelaempresaamerianaCalspan(WEINGARTEN,2005).
A meanizaçãose dá om umaaeronave de araterístiasaerodinâmias
onhe-idas (hospedeiro), sendo modiada para servir omo se fosse a nova aeronave
que se está querendo ensaiar (hóspede) (PARRAG, 2001). O método onsiste
emanularmatematiamenteasaraterístiasdaaeronavehospedeira,atravésde
ummodelomatemátio inverso,e produzirsaídas(outputs) queseassemelhem à
aeronave hóspede. O aparato exige ummodelo matemátio bastante preiso da
aeronave hospedeira e do modelo matemátio da aeronave hóspede, geralmente
provenientedeensaiosde túneldevento. Omodelodosistemadeontroleda
ae-ronavehóspede,inluindoaíaslatêniasdasinformações,étambémfundamental
pararesultadosaeitáveis. Umavez sintonizadosambosmodelos,sãoexeutadas
tarefasdepouso,deapturaemanobrassintétiasparaavaliarasrespostas.
Sem-preompossibilidadesdereversãoparaasaraterístiasda aeronave hospedeira
(reversãoparamanual),minimizandorisode aidentes.
A vantagem desse tipo de ensaio é a delidade em termos de aelerações e de
realimentaçãovisual(feedbak),semoatrasodossimuladoresemterra(CELERE;
FERNANDEZ;OLIVEIRA,2000). A desvantagemé o altousto.
Um exemplo de aeronave om apaidade para exeutar simulações em vo é o
Learjetda Calspan,empresaameriana espeializadaempesquisasde PIO.Uma
fotodessaaeronave podeser vistana gura3.2.
◦
Tarefas Sintétiasro-Figura 3.2: gura ilustrativa extraída do atálogo da empresa ameriana Calspan. A
aeronave tem um sistema de estabilidade variável e é utilizada omo plataforma para
simulaçõesemvo- Learjet Calspan.
Fonte: (CALSPAN,2007)
CHELL;KLYDE,2001). Oobjetivodesse aparato éinduzirentradas (inputs)no
sistema aeronave-piloto. As tarefas (séries de omandos enviados a esse diretor
de vo equeopilotodeve seguiromo maisalto ganhopossível)sãoonstruídas
a partirdoonteúdode freqüêniadesejado etambémpor meiode um
balanea-mentoentreasetapasdeaquisição(netraking)emanutenção(grossaquisition)
de atitude.
Essemétodoébastanteseguro,hajavistaquesepoderegularastarefasdemaneira
anãoexederlimitesdaaeronave,bemomoexeutá-lasemaltitudesonfortáveis.
A prinipal vantagem é a segurança proporionada. A prinipal desvantagem é
quesósepodeexeutá-lasna própriaaeronavesendodesenvolvida, nãodeixando
margem para alterações grandes de projeto sem um alto usto elevado. Uma
desrição maisdetalhadadessa manobra seguena seção3.4.1 e será parte
funda-mentaldeste trabalho, umavez que estaé a prinipal manobra esolhida para a
realizaçãodosensaios dePIO.
iniia-se a uma altitude de aproximadamente 3 envergaduras, om o entro da
pista desloadoparaumdos lados. Já em voestabilizado e nivelado,a aptura
doentrodapistaéexeutadaomaltoganho(ominlinaçõesdeasaquehegam
a45graus). Aapturaéfeitaomoauxíliodeumamaranopára-brisa,quedeve
ser alinhada om a faixa entral. Uma vez apturado, o alinhamento é mantido
por 5 a 10 segundos. Outro tipo de aptura é o hamado de urva em S, ou
S-Turn, ondeaslateraisesquerda edireita dapista sãoalternadamenteapturadas
mantendo-se umaaltitude bastantepequena (50 pés) (LEE, 2001; PONCELET;
ALONSO,2001). Paraquehajaeáianestamanobra,é neessárioqueoganho
Figura 3.3: S-Turns
EsquemaparaexeuçãodamanobraS-Turn,ondeopilotoprouravoarsobreapista
emaltitudes adavez menores,indo deumlado paraoutro,apturando as laterais
noseuampovisual
empregado pelo piloto seja alto (omo em qualquer ensaio de PIO). Porém a
própriaondição de baixa altura geradesonforto e induzà utilização deganhos
menores. Outro aspetoprátioaseonsideraréoespaçolateral neessário. Não
podehaveronstruçõesaoredordapistaparanãoomprometerasegurança. Por
último,asohajaoorrêniadealgumevento,existepouamargemparamanobras
evasivas. Destamaneira, apesar de ser onsideradaeaz, essamanobra é pouo
utilizada naertiaçãoivil.
◦
Vo emFormaturaConsiste em se exeutar tarefas de preisão utilizando-se uma aeronave externa
janela do piloto) (LEE, 2001) e posterior manutenção de posição sob as várias
intempériesde vosem formatura. Há,também, aversão de simulação de
abas-teimento em vo ( ou probe-and-drogue maneuver), que é bastante eiente em
evideniar PIOs (KLYDE; MITCHELL; LATTIMER, 1999). A vantagem é ser
simplesdeexeutar. Asdesvantagenssãousto elevado erisode olisãoemvo.
Fotos deste tipo deensaio podemser vistas nasguras3.4, 3.5e 3.6.
Figura3.4: VoemFormatura01fotodo ensaiodesimulaçãodeabasteimentoem
voevoemformatura. A aeronaveàfrentereboaumamangueiraomumaesta na
ponta. A aeronave maisatrás tenta seposiionar paraenaixar a esta emuma haste
tíia desenhadano pára-brisa.
Figura 3.5: Vo em Formatura 02 foto de dentro da aeronave sendo ensaiada,
mostrandoaestasendopuxadapelaaeronavedafrenteeashastestíiasdesenhadas
nopára-brisa. Cadaposiçãorepresenta umahaste sendoensaiada.
fonte: arquivoEnsaioemVo-EMBRAER
Figura3.6: Vo emFormatura 03 detalhe dashastestíias desenhadasno
pára-brisa daaeronave sendoensaiada.
◦
PousoomDesvio Lateral, ouOset LandingConsisteumexeutarumpousodepreisão,partindodeumasituaçãodesalinhada
om a pista (geralmente uma a duas envergaduras fora do eixo) e, geralmente,
mantendouma rampa de 3 graus paratoque na abeeira. A orreçãolateral se
Figura3.7: Esquemaparaexeuçãodamanobra depousoomdesviolateral,ouOset
Landing Notar que há duas áreas hahuradas denidas na gura. Uma maior, om
3000 pésde omprimento e 60pésde largura, que é azona onsiderada aeitávelpara
o pouso. Umasegunda,menor eontida dentroda maior,de 1000pésdeomprimento
e 20 pés de largura, dentro da qual um pouso é denido omo desejável. O piloto
deve esforçar-se para pousar na área menor, sendo que o alinhamento om a pista é
diultado pelo desviolateral.
dáentre200e100pésdealtura,eopousoneessariamentedeveserexeutadoem
espaçoonnado, tipiamenteumretânguloimagináriode 100por20metros,em
algumloalpróximoàabeeira. Avantageméserumatarefadealtíssimoganho
e, portanto, onsiderada uma das melhores manobras para evideniar PIOs. A
desvantagem é a justa margem para erros, devido à proximidade om o solo e,
Emtodososensaios desritosno itemanterior, há umahipótese muito forte
asso-iada: O piloto exeutará a tarefa om o mais alto ganhopossível, exitando
uma possível ondição real de PIO. Essa hipótese é fundamental para que,
en-quanto ontrola a aeronave, o piloto aja de maneira similar a uma situação onde há
umadefasagemsigniativa entreseus omandoseasrespostas daaeronave. Semuma
pilotagemdealtoganho,nãoépossívelidentiarumPIO.Porém,nenhumdosensaios
desritostem omoondição validadora a garantiade que o pilotoestá realmente
atu-andoomganhoalto. Inlusivehárelatosdequeosimplesonheimentodequesetrata
de umensaio,e não dasituação real,levao pilotoa modiar ogatilho domeanismo
deiníiodoPIO(CORD,2001). Ahipótese ésimplesmenteassumidaomoverdadeira,
e a únia providênia para se tentar garanti-la é um brieng 2
bem exeutado, uja
ondição de pilotar realmente om alto ganho é enfatizada para o piloto partiipante
do ensaio. A literatura admite que essa hipótese não é sempreverdadeira. Há relatos
dadiuldade depilotos de ensaiosmimetizarem umaoperação de linhaaérea ou uma
situaçãode PIO:
[...℄ também foi enontrado que era difíil um piloto de ensaios treinado
fehar a malha da mesma maneira que um piloto em serviço o faria. Foi
a experiênia de trabalhar om pilotos de ensaio que evideniou dúvidas
na abeça deste apresentador quanto a avaliações de qualidades de vo.
Este [pensamento℄ tem a raiz na variabilidade e subjetividade da visão de
adapilotoeainda épossívelobterumafaixa de omentáriosde umpiloto
individual(SMITH,1995).
Há tambémreomendaçõesparaque odesempenho do pilotoseja monitorado durante
osensaiosequeumavariabilidadeentrepilotosdeveseresperada(MITCHELL,2001).
Coloa-se,pois,atese destetrabalho: umensaiode PIOdeveriaservalidado
primaria-mentequantoaoganhodopiloto. Épropostoummétodoparaveriaraexeução
depontos deensaiopara veriação dePIOutilizando-se aténia detarefa
2
briengé o nome utilizado para a reuniãoque anteede uma missão ou um ensaio, onde todos
sintétia. UmasegundahipótesesobreensaiosdePIOéqueopilotoéapazdese
abs-trairdoensaioepereber,duranteaexeuçãodamanobra,sehádesontinuidadeentre
os omandospropostos pelo érebroe a resposta da aeronave,mimetizando a situação
em que umeventualPIO oorreria. A experiênia nosprogramas de ertiação FAR
25 dosmodelos EMB-135BJ, ERJ-170/175/190 e 195 demonstrou que essa hipótese é
bastanterazoávele,portanto,não será ofoo destetrabalho.
3.4 Ténia de Manobras Sintétias
3.4.1 Desrição e História
Desdeoiníiodaspesquisasomontrolesmanuais,háumatentativadereproduzir
dentro do laboratório assituações veriadas no usoprátio, que seguematé a
atuali-dade (DUPPEN etal., 2007). Asprimeirasexperiêniasomomputadoresanalógios
mostrandopontose traçosparaumoperadorhumanoseguirnatela deumosilosópio
datamdadéadade50esofrerambastanteavançoduranteaorridaespaialdadéada
de60(BEKEY;ANGLE,1966;PREYSS;MEIRY,1967). Umamiríadedeexperiênias
foi produzida e om o aúmulo desse onheimento, aliado ao renamento da preisão
das medidas, hegando até a se onstruir uma simulação que utiliza uma maquete de
pista de pouso e âmera de televisão para realizar a lmagem e prover uma imagem
simuladaparao pilotoatravésdeumatelevisão (CHASE,1967), aprimeirametadeda
déada de70 mostrouque osexperimentos emlaboratóriotraziam sérias limitações:
1. Falta de feedbak da dinâmia da aeronave (aelerações), o que ausa omandos
exessivos. Essetipodedesviodasituaçãorealprovou-sebastanteimportantena
ompreensãodopadrãoognitivodopilotohumano,revelandoqueasinformações
adiionaisutilizadas noproessamento do ontrolesão bastanterelevantes;
2. Atraso nosistemavisual,entreo omandoe arespostado sistema,gerando falta
de delidade e atrapalhando a visão periféria, onseqüentemente inserindo um
fator de erro a mais no proessamento das informações feito pelo piloto (uma
ganhoadequadanopiloto. Aliteraturamostraqueháumatendêniaaseefetuar
umapilotagemqueéagressivaporém,omooambientedelaboratórioemsolonão
implia em riso de aidente e também não traz elementos omo barulho, visão
periféria, vibrações e aelerações presentes em uma aeronave real, a pilotagem
a agressiva emdemasia, sem queo piloto possa relaionaresses testes emsolo
oma experiênia emensaiosemvo.
Busando uma solução que suplantasse essas diuldades, foiinventadoo oneito de
tarefa sintétia pela empresa ameriana Calspan. A base para a idéia vemdas
mano-bras de reabasteimento em vo, que sãonotoriamenteexigentes do ponto de vista de
pilotagemejá desvendaramváriosPIOs emaeronavesmilitares.
3.4.2 Aparato Experimental
Com o lançamento do programa de desenvolvimento tenológio para projeto de
ontroles y-by-wire na EMBRAER em 1998, foi neessário desenvolver ferramentas
quedessemsuporteaosensaiosrequeridosparaposterior ertiação. Visando atender
osrequisitos para ensaiosde PIO, este autor liderou o desenvolvimento do sistema de
tarefas sintétias da EMBRAER, hamado Syntask, om o mesmo oneito daquele
apresentadopela Calspan, emque uma tarefa (ompensatory) é apresentadaao piloto
para que ele a siga om o mais alto ganho possível. Iniialmente foram pesquisadas
várias interfaes, aparato omputaional, interfae de entrada de dados e análises em
tempo real simpliadas. Após várias revisões do projeto, ontando om ensaios de
desenvolvimento,ongelou-seosistemaonformeaarquiteturamostrada nagura3.8.
Oseufunionamento oorreda seguinteforma:
◦
É denida uma tarefa em que as atitudes desejadas (target attitudes) para adainstantedetempo sãolistadasemumarquivo;
◦
Estearquivoélido duranteoensaioe sinronizadoomossensoresdeatitudedaaeronave,sendo, então,omputadaadiferençaentrea atitudeemqueaaeronave
estáe aatitudedesejada;
de vo;
◦
Asaçõesdo pilotoe asatitudesresultantessão gravadas nosistemade aquisiçãode dados.
Figura 3.8: Arquitetura Sistema Syntask da EMBRAER a unidade inerial fornee
informaçõesdeatitude, quesãoreebidaspelaRMU.Osdadossãoenviadosao
ompu-tador prinipal por sinalPCM (pulse ode modulated). Este insere os dados da tarefa
sintétia no sinal e remete o onjunto ompleto para o omputador de imagem. As
imagenssãogeradasemostradasaopilotoviatelaLCD(liquid rystaldisplay)dolado
esquerdo (1P)na posiçãoprinipal PFD (primary funtiondisplay).
Asfunçõesdosomponenteslistadosnaquelagurasãodenidasnatabela3.2. Um
pontomuitoimportanteparaestetipodeensaioémanteromenoratrasopossível,haja
vista a sensibilidadedos resultadosom relaçãoa este parâmetro. Osistemautilizado
neste trabalho tem as araterístias de atraso máximo espeiado em 140ms, e os
Tabela 3.2: FunçãodosComponentes doSistema Syntask
Componente Função
IRU Sistemainerialpara mediratitudes
RMU Sistemadeaquisiçãodedados
Mainomputer Computador ondeégeradaa tarefasintétia(targetattitudes)
Syntaskomputer Computador ondeégeradaa imagemparao piloto
Figura3.9: Atrasosdo Sistema Syntask
adiional nessesexperimentoslevaa umamaiorsuseptibilidade a PIO. Deorrenteda
preoupaçãodenãointroduzirumnovofatornoexperimento,espeialmentenotoante
ao proessamento deinformaçõespelopiloto, foiutilizado oformato-padrão paravos
porinstrumentoomointerfaehomem-máquina,onheidoomodiretordevoV-Bar.
Trata-se de um pitóreo básio e padronizado na indústria aeronáutia, om que um
pilotohabilitado paraotiponeessariamenteestá familiarizado. Portanto,
onsiderou-sequeo tempode proessamento da informaçãopelopiloto éigual ao tempogasto no
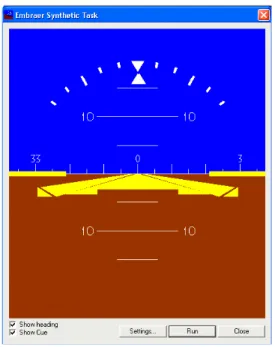
Figura 3.10: Pitóreo Utilizado omo Interfae Homem-Máquina - Diretor de Vo no
padrão V-Bar
Fonte: ArquivoEnsaioemVo-EMBRAER
Umaoutrapreoupaçãoexistentenoprojetododispositivofoitentardaraopilotoa
melhorondiçãoparaquehouvessepreisãonapilotagem. Dessamaneira,foiesolhida
umatelagrandeparaafáilleituraeparaquearesolução,prinipalmenteemrolamento,
Figura3.11: Arranjo Físiodo DisplaynoCokpit
3.4.3 Denição das Tarefas
A denição das tarefas sintétias (a seqüênia de omandos no tempo que será
enviadaparaopilotoseguir)ébastantepolêmia(VANDENBERGetal.,2007). Deum
lado, éneessárioqueelas tenhamumonteúdoemfreqüêniasquesejarepresentativo
de PIOs. Por outro, não podem ser desonexas om o tipo de aeronave em questão,
ontendo manobrasquesejam agressivasemdemasia ouqueultrapassem oslimites do
envelopeoperaional.
Astarefasdesenvolvidasparaseremutilizadasnestetrabalhosãoresultadodevários
ensaiosemsimuladoreemvorealizadaspelaEMBRAER,eforamjulgadas
representa-tivasdeumaaproximaçãoCATIIporinstrumentosombastanteturbulênia,onforme
desrito em (CELERE, 2002). Em adição, o onteúdo em freqüênia foi ajustado de
maneira a ontemplar a faixa de interesse. Um exemplo de tarefa utilizada e de seu
onteúdoemfreqüênia podeservistonasguras3.12e3.13;asoutras tarefastêm
for-mas pareidas e serão apresentadas na seção de resultados. A quantidade e a duração
dospatamaresdeatitudeonstantetambémfoidimensionado. Oritérionesteasofoi
darondiçõesparao pilotoveriarasduasetapas de umatarefa:
◦
Aquisição(GrossAquisiton)Figura3.12: Tarefa deRolamento
-109
-108
-107
-106
-105
-104
-103
-102
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
PSD (grau
2
/Hz)
freq (Hz)
Densidade Espectral (PSD)- Tarefa de Rolamento
Umoutroaspetoimportantenadeniçãodastarefaséaapaidadedeaprendizado
do ser humano. Por mais aleatória que pareça uma tarefa sintétia apresentada ao
pilotopelodiretordevo,foiveriadoqueháumaretençãoe,onseqüentemente,uma
mudançanomododeexeutaramanobra,passandoaserpré-ognitivaemodiandoos
resultados (MCRUER, 1995). Paratentar minimizar esse efeito, as tarefas envolvidas
nos ensaios desta tese foram multipliadas por meio de inversão e/ou espelhamento.
A ténia é simples e não altera o onteúdo em freqüênia. Na inversão, a tarefa é
apresentadadetrásparaafrentee,noespelhamento,aatitudeémultipliadapor(-1).
Os efeitospodemtambémser ombinados,eumexemplo podeservistona gura3.14.
Figura3.14: Inversão e Espelhamento dasTarefas
Por último, há de se onsiderar a saturação dos anais de arfagem e rolamento
quando se desenham as tarefas. Há uma tendênia natural de se priorizar o anal de
arfagem na pilotagem humana, em detrimento das orreções do anal de rolamento
(CLIFF, 1972). Esse argumento é utilizado em favor da separação dosanais, ao
efe-tuar tarefasque exitam apenas arfageme outras apenas para rolamento. As tarefas
om exitaçãoemambosanais sãoutilizadasapenasparaveriar aoplamento entre