F
ACULDADE DEE
NGENHARIA DAU
NIVERSIDADE DOP
ORTOControlador Tolerante a Falhas para
Veículo Elétrico Multi-Motor
Sérgio Daniel de Sousa Almeida
MESTRADOINTEGRADO EMENGENHARIA ELETROTÉCNICA E DE COMPUTADORES
Orientador: Prof. Dr. Rui Esteves Araújo
Resumo
Recentemente, os veículos elétricos multi-motor trouxeram um nova classe de problemas re-lacionados com o controlo de movimento do veículo. Em contraste com os tradicionais veículos baseados em motores de combustão interna cujo sistema de transmissão necessita de diferenci-ais mecânicos, os veículos elétricos possibilitam o controlo independente do binário de trava-gem/aceleração em cada roda. Esta técnica de atuação, combinada com uma resposta rápida e precisa dos motores elétricos possibilita o melhoramento das tradicionais metodologias de con-trolo, tais como o controlo direto do momento externo, controlo de tração, entre outros. Contudo os benefícios do controlo independente do binário são contrariados pelo aumento da probabilidade de ocorrência de falhas devido à elevada complexidade dos sistemas de propulsão. A ocorrência de falhas nos motores pode resultar numa deterioração do desempenho do veículo ou mesmo levar à instabilidade devido à perda do binário desejado numa roda. Este contexto motiva o estudo de projetos de controladores que garantam a estabilidade e bom desempenho de um veículo elétrico multi-motor.
A principal ideia proposta com o presente trabalho consiste no projeto de um sistema de controlo que garanta o desempenho e estabilidade de um veículo elétrico multi-motor perante a ocorrência de falhas nos motores. A novidade do trabalho consiste no desenvolvimento de uma metodologia de distribuição de binários capaz de mitigar os efeitos das falhas que ocorrem nos motores. Para isso, a ideia central da metodologia aplicada foca-se na utilização das forças lon-gitudinais para uma atuação direta do valor de binário em cada roda, com o objetivo de controlar o yaw rate e simultaneamente o ângulo de side-slip. Assim, para a resolução deste problema é apresentada uma metodologia de controlo baseada em técnicas de controlo por modo de desli-zamento que garanta a estabilidade e robustez perante falhas ocorridas nos motores e incertezas paramétricas de modelação.
O veículo considerado possui quatro motores dispostos nas quatro rodas e apenas se considera a ocorrência de uma falha num motor para um determinado instante. O veículo possui capacidade direcional apenas nas rodas dianteiras.
Foram realizadas um conjunto de simulações e co-simulações, respetivamente em Simulink R e CarSim , com o objetivo de validação do sistema de controlo proposto. As simulações efetua-R das demonstram a eficácia do controlador proposto, tendo ficado demonstrada a possibilidade do controlador adequar a distribuição de binários de forma a suportar a ocorrência de uma falha nos propulsores.
Abstract
Recently, the multi-motor electric vehicles open a new class of chassis control problems. In contrast to the traditional vehicles based on internal combustion engines with mechanical differen-tial, electric motors give the possibility to independently control the driving/brake torque of each motor wheel. Such actuation technique combined with the electric motor’s fast and precise torque response enhances the traditional control strategies like the direct yaw moment control, traction control systems and other existing methods. However the benefits of independently controlling the torque are counteracted by increasing the probability of failure due to the higher complexity of the propulsion system. Hence, the need to design controllers that guarantee both stability and performance upon the occurrence of faults has been an active area of research. Without the pro-per accommodations the motors faults may result in vehicle pro-performance deterioration or even instability due to the loss of desired torque on a particular wheel.
The main idea of this work is to define an appropriate control system that allows better han-dling and mitigation of the motor drive faults. To this end, this work will focus on studying the possibility of using the longitudinal wheel forces to simultaneously control vehicle yaw rate and indirectly control the sideslip as a driver assist system. To address this problem, we present a methodology based on sliding mode control to design robust controllers that guarantee both stabi-lity and robustness for actuator faults and uncertainties.
The proposed vehicle has four motors in the four wheels but only the front wheels are steered. It was considered a fault occurrence in each of the four motors.
It was carried out several simulation and co-simulations, Simulink and CarSimR respecti-R vely, with the aim of validating the proposed control system. The performed simulations shows the effectiveness of the proposed fault tolerant control in various driving scenarios. It was demons-trated the possibility of the control allocation for an fault occurrence in the actuator’s.
Agradecimentos
Em primeiro lugar quero deixar um agradecimento especial ao Professor Rui Araújo. Pelo seu empenho, motivação e disponibilidade conseguiu transmitir o que realmente é importante no mundo académico, a contribuição para a inovação.
Quero também agradecer a todos os meus colegas que me acompanharam ao longo do meu percurso académico que estiveram sempre disponíveis para me ajudarem. Aos colegas de labo-ratório, um especial obrigado por me aturarem todos os dias e manterem sempre um ambiente construtivo no laboratório.
Gostaria de agradecer à Suse pelo seu apoio incondicional e pela motivação que me transmite. Finalmente, gostaria de agradecer aos meus pais pelo esforço de me suportarem ao longo da minha vida estudante, e que sempre lutaram por uma melhor formação para os filhos.
Sérgio Almeida
“I have learned more from my mistakes than from my successes.”
Humphry Davy
Conteúdo
1 Introdução 1 1.1 Motivação . . . 1 1.2 Objetivos da Dissertação . . . 3 1.3 Contribuições da Dissertação . . . 4 1.4 Estrutura do documento . . . 4 2 Revisão Bibliográfica 5 2.1 Introdução . . . 52.2 Conceitos Básicos e Terminologia . . . 7
2.3 Falhas, Avarias e Comportamento de Sistema . . . 8
2.4 Classificação das Falhas . . . 10
2.5 Controlo Tolerante a Falhas . . . 12
2.5.1 Classificação de Sistemas de Controlo Tolerante a Falhas . . . 13
2.5.1.1 Sistemas de Controlo Tolerante a Falhas Passivos (SCTFP ) . . 14
2.5.1.2 Sistemas de Controlo Tolerante a Falhas Ativos (SCTFA ) . . . 14
2.5.2 Diagnóstico e Deteção de Falhas . . . 16
2.5.2.1 Métodos Baseados em Modelos . . . 17
2.5.2.2 Métodos Não Baseados em Modelos . . . 20
2.6 Visão Geral de CTF em Veículos Elétricos . . . 21
2.7 Conclusões . . . 22
3 Modelo Matemático do Veículo 23 3.1 Introdução . . . 23
3.2 Modelos do Movimento de Veículo . . . 24
3.2.1 Modelo Fundamental . . . 24
3.2.1.1 Equações Fundamentais . . . 24
3.2.1.2 Derivação das Equações de Estado . . . 27
3.2.2 Modelo Simplificado . . . 29
3.2.3 Modelo Equivalente da Bicicleta Linear . . . 32
3.3 Modelo Interface Pneu/Estrada . . . 35
3.3.1 Características Fundamentais . . . 35
3.3.1.1 Velocidade Linear das Rodas . . . 35
3.3.1.2 Ângulo de Deslizamento da Roda (α) . . . 37
3.3.1.3 Deslizamento Longitudinal da Roda (s) . . . 39
3.3.1.4 Força de Atrito ao Rolamento FRX . . . 40
3.3.1.5 Força de Atrito Aerodinamico FW INDX . . . 41
3.3.2 Modelos de Forças . . . 41
3.3.2.1 Modelo da Fórmula Mágica . . . 41 ix
4.1.1 Funções de Transferência para Entrada de Ângulo de Direção (δ ) . . . . 52
4.1.1.1 Caracterização de ˙ψ /δ e β /δ em Regime Permanente . . . 52
4.1.1.2 Caracterização de ˙ψ /δ e β /δ em Regime Dinâmico . . . 57
4.1.1.3 Dedução de Função Transferência para ˙ψ(s)/δ (s) e β (s)/δ (s) . 59 4.1.2 Funções de Transferência para Entrada de Momento Externo (Mz) . . . . 60
4.1.2.1 Caracterização de ˙ψ /Mze β /Mzem Regime Permanente . . . . 61
4.1.2.2 Dedução das Funções Transferência . . . 62
4.1.3 Funções de Transferência Finais . . . 63
4.2 Análise de Sensibilidade Paramétrica . . . 65
4.2.1 Caracterização da Sensibilidade Paramétrica para Regime Permanente de ˙ψ 65 4.2.2 Caracterização Analítica da Sensibilidade Paramétrica para ˙ψ . . . 67
4.3 Conclusões . . . 68
5 Projeto de Controlo e Implementação 71 5.1 Introdução . . . 71
5.2 Conceitos de Controlo por Modo de Deslizamento . . . 72
5.3 Características de Veículo . . . 75
5.3.1 Sistema de Propulsão . . . 76
5.3.2 Restrições ao Nível dos Motores . . . 76
5.3.2.1 Curva Característica de Binário Velocidade . . . 76
5.3.2.2 Restrição para Momento Externo Disponível . . . 78
5.4 Objetivos de Controlo . . . 80
5.4.1 Reformulação do Modelo Matemático . . . 80
5.5 Modelação das Falhas . . . 81
5.5.1 Modelo com Presença de Falhas . . . 81
5.5.2 Modos de Falhas . . . 82
5.6 Arquitetura do Controlador . . . 83
5.6.1 Bloco de Geração de Sinais de Referência . . . 83
5.6.2 Bloco de Geração de Falhas . . . 85
5.6.3 Bloco de Controlo Tolerante a Falhas . . . 86
5.6.3.1 Projeto de CTF por Modo de Deslizamento . . . 86
5.6.3.2 Metodologias de Alocação de Binários . . . 90
5.7 Conclusões . . . 91
6 Resultados e Validação Computacional 93 6.1 Simulações com Modelo Matemático Implementado . . . 93
6.1.1 Lista de Ensaios . . . 93
6.1.2 Sintonia do Controlador . . . 94
CONTEÚDO xi
6.1.3.1 Linha Reta . . . 95
6.1.3.2 J-Turn . . . 97
6.2 Simulações com Modelo CarSim . . . 100
6.2.1 Modelo CarSim . . . 100 6.2.2 Plataforma de Validação . . . 100 6.2.3 Sintonia do Controlador . . . 102 6.2.4 Lista de Ensaios . . . 102 6.2.5 Estudos de Simulação . . . 102 6.2.5.1 J-Turn . . . 102 6.2.5.2 Single-Lane Change (SLC) . . . 103
6.2.5.3 Double-Lane Change (DLC) com Erros Paramétricos . . . 106
6.2.5.4 Atraso nos Atuadores . . . 107
6.2.5.5 Atraso na Informação . . . 109
6.3 Conclusões . . . 109
7 Conclusão 111 7.1 Conclusões da Dissertação . . . 111
7.2 Desenvolvimentos Futuros . . . 112
A Estimação Paramétrica - Cornering Stiffness 115 B Expressões de Sensibilidade Paramétrica 119 C Plataforma Computacional de Validação Simulink 121 D Configuração de Modelo CarSim 123 D.1 Interface Principal . . . 123
D.2 Descrição de Blocos de Configuração . . . 123
D.3 Configurações Implementadas . . . 124
Lista de Figuras
1.1 Exemplo de utilização de controlo tolerante a falhas para veículos . . . 2
2.1 Estrutura de sistema tolerante a falhas . . . 6
2.2 Exemplo de sistema . . . 9
2.3 Interpretação gráfica de comportamento de sistema . . . 9
2.4 Regiões de desempenho de um sistema . . . 10
2.5 Distinção entre falhas nos atuadores, planta e nos sensores . . . 11
2.6 Classificação de falhas pelo seu comportamento temporal a) Falha Abrupta b) Fa-lha incipiente c) FaFa-lha intermitente . . . 11
2.7 Modelos básicos das falhas: a) falhas aditivas b) falhas multiplicativas . . . 11
2.8 Áreas de investigação para CTF . . . 12
2.9 Arquitetura clássica de controlo tolerante a falhas . . . 13
2.10 Classificação dos sistemas de controlo tolerantes a falhas (SCTF) . . . 14
2.11 Subsistemas constituintes de sistemas de controlo tolerante a falhas ativo . . . 15
2.12 Estrutura geral de um sistema de controlo tolerante a falhas ativo . . . 16
2.13 Classificação de sistemas DDF . . . 17
2.14 Estrutura básica de um esquema DDF baseados em modelos . . . 18
2.15 Estrutura conceptual de um modelo de diagnóstico de falhas . . . 19
2.16 Estrutura genérica de método de estimação de falhas . . . 20
3.1 Esquemático representativo de veículo de quatro rodas e seus graus de liberdade . 23 3.2 Esquemático representativo dos sistemas de coordenadas de um veículo e princi-pais grandezas a ele associadas . . . 25
3.3 Esquemático representativo de ângulos de direção para rodas dianteiras . . . 26
3.4 Exemplo de decomposição de forças para roda dianteira esquerda . . . 28
3.5 Sistema de coordenadas para dinâmica de veículo . . . 30
3.6 Variações dos vetores unitários em ordem ao tempo . . . 31
3.7 Modelo equivalente da bicicleta . . . 33
3.8 Diagrama de blocos para modelo de espaço de estados . . . 34
3.9 Diagrama de modelo interface pneu/estrada . . . 36
3.10 Raios individuais das rodas durante movimento de curva . . . 37
3.11 Raios diferenciais utilizados para determinar as velocidades da roda . . . 38
3.12 Definição do ângulo de deslizamento para roda dianteiras e traseiras . . . 39
3.13 Estrutura de deformação de pneu e respetivos raios . . . 40
3.14 Aproximação linear das forças laterais geradas na interface pneu/estrada . . . 42
3.15 Ilustração representativa de veículo utilizado - A - Class HatchBack . . . 46 3.16 Esquemático representativo de processo de validação de modelo implementado . 46
variações da velocidade do veículo (δ = 0.04 rad) . . . 55
4.3 Relação entre Yaw Rate ( ˙ψ ) e velocidade de veículo (VCdG) para regime perma-nente de curvatura (δ = 0.04 rad) . . . 56
4.4 Relação entre ângulo de Side-Slip e velocidade do veículo para entrada Mz em regime permanente (Mz= 1000 Nm) . . . 62
4.5 Relação entre Yaw Rate e velocidade de veículo para entrada Mzem regime per-manente (Mz= 1000 Nm) . . . 63
4.6 Erros normalizados para variação de parâmetros físicos para ganho em regime permanente do ˙ψ . . . 66
4.7 Análise da sensibilidade para ganho em regime permanente de dinâmica de yaw rate 69 5.1 Estrutura genéria de um controlador para um veículo elétrico multi-motor . . . . 72
5.2 Zonas de vizinhança para superfície de deslizamento . . . 74
5.3 Condição de deslizamento (sliding) . . . 75
5.4 Sistema de propulsão do veículo . . . 76
5.5 Curva característica de relação binário-velocidade de motor . . . 77
5.6 Implementação em Simulink para restrição de curva de binário/velocidade . . . . 77
5.7 Análise de Mzdisponível para diferentes casos de velocidade e coeficiente de atrito 79 5.8 Esquema representativo das falhas nos motores consideradas para o veículo . . . 82
5.9 Esquema de controlo proposto . . . 84
5.10 Exemplo de geração de sinais de referência para Yaw Rate . . . 84
5.11 Plataforma de geração de falhas em ambiente Simulinkr . . . 86
5.12 Esquemático representativo da função sat(s/ε) . . . 89
5.13 Diagrama de estruturas constituintes do bloco de alocação de binário . . . 90
5.14 Exemplo representativo de metodologia de alocação de binários . . . 91
6.1 Comparação entre trajetória desejada e trajetória de veículo com falha sem con-trolador . . . 95
6.2 Comparação entre yaw rate e yaw angle de referência com veículo com falha sem controlador . . . 95
6.3 Comparação entre yaw rate de referência e yaw rate obtido com controlador . . . 96
6.4 Comparação entre velocidade longitudinal de referência e velocidade obtida com controlador . . . 96
6.5 Comparação entre trajetória de referência e trajetória obtida com controlador . . 97
6.6 Valores de binários aplicados com falha FL . . . 97
6.7 Sinal de ângulo de direção (δ ) . . . 98
6.8 Comparação entre yaw rate de referência com yaw rate com controlador proposto 98 6.9 Valores de binários para falha considerada em manobra J-turn . . . 99
LISTA DE FIGURAS xv
6.10 Comparação entre trajetória de referência e trajetória de veículo com controlo
to-lerante . . . 99
6.11 Modelo CarSim aplicado . . . 100
6.12 Plataforma computacional desenvolvida para validação de sistema de controlo em CarSim . . . 101
6.13 Análise de yaw rate para diferentes valores de falhas . . . 103
6.14 Binários para manobra J-Turn para modelo Carsim . . . 103
6.15 Manobra SLC e respetivo sinal de yawrate . . . 104
6.16 Erro normalizado para comparação entre valores de yaw rate de referência com valor obtido . . . 104
6.17 Trajetória de veículo para manobra SLC . . . 105
6.18 Distribuição de binários para manobra SLC . . . 105
6.19 Estudo da variação de lrcom introdução de uma falha RR para manobra DLC . . 106
6.20 Estudo da variação de Cf com introdução de uma falha RR para manobra DLC . 106 6.21 Estudo da variação de Vxcom introdução de uma falha RR para manobra DLC . . 107
6.22 Binários relativos ao atraso na atuação para uma manobra J-Turn (τ = 10 ms) . . 108
6.23 Comparação entre valores de trajetória e yaw rate sem e com atraso nos atuadores (τ= 10 ms) . . . 108
6.24 Estudo de desempenho de controlador para diferentes valores de atrasos nos atua-dores . . . 109
6.25 Trajetória de veículo perante diferentes valores de atrasos na informação de Mf . 110 7.1 Representação esquemática de proposta de desenvolvimentos futuros . . . 113
A.1 Forças laterais para entrada em degrau . . . 116
A.2 Ângulos de deslizamento . . . 116
A.3 Valores de cornering stiffness para eixo dianteiro . . . 117
A.4 Valores de cornering stiffness para eixo traseiro . . . 117
C.1 Plataforma computacional para validação e testes de sistema de controlo em Si-mulink . . . 121
Lista de Tabelas
2.1 Técnicas de desenvolvimento para sistemas de controlo tolerante a falhas ativo . . 16
3.1 Parâmetros de veículo simulado . . . 47
4.1 Parâmetros físicos nominais do modelo proposto . . . 65
5.1 Característica de motor . . . 76
5.2 Modos de falhas para os quatro motores . . . 83
6.1 Resumo de ensaios efetuados para simulações com modelo proposto . . . 93
6.2 Falhas injetadas para ensaios com o modelo proposto . . . 94
6.3 Parâmetros de controlador linear . . . 94
6.4 Parâmetros para controlador não linear . . . 94
6.5 Resumo de ensaios efetuados para modelo CarSim . . . 102
6.6 Falhas injetadas para ensaios com modelo CarSim . . . 102
D.1 Parâmetros de configuração de modelo CarSim . . . 124
Abreviaturas e Símbolos
Acrónimos
CdG Centro de Gravidade CTF Controlo Tolerante a Falhas DDF Diagnóstico e Deteção de Falhas DIF Deteção e Isolamento de Falhas DOF Degree of Freedom
DLC Double-Lane Change
FEUP Faculdade de Engenharia da Universidade do Porto I/O Entradas/Saídas
ICM Centro Instantâneo de Movimento
IFAC International Federation of Automatic Control KBS Knowledge Based Systems
MDA Métodos de Diagnóstico Ativo MDP Métodos de Diagnóstico Passivo PDI Preparação para a Dissertação
SCTF Sistemas de Controlo Tolerante a Falhas SCTFA Sistemas de Controlo Tolerante a Falhas Ativo SCTFP Sistemas de Controlo Tolerante a Falhas Passivo SLC Single-Lane Change
SMC Sliding Mode Control
SF Fator de Estabilidade (Stability Factor) USSR Union of Soviet Socialist Republics VE Veículos Elétricos
Notações Matemáticas
x, y, z Sistema de coordenadas fixo ao CdG do veículo XIN,YIN, ZIN Sistema de coordenadas inercial
˙
x, ˙y Componentes de velocidade no sistema de coordenadas do veículo [m· s−1]
˙
XIN, ˙YIN Componentes de velocidade no sistema de coordenadas inercial [m· s−1]
Cf Cornering Stifnessda roda dianteira [N/rad]
Cr Cornering Stifnessda roda traseira [N/rad]
g Constante de aceleração gravítica g≈ 9.81m/s2
K Matriz diagonal que define as falhas/avarias nos motores m Massa do veículo [kg]
kp, ki Ganhos de controlador PI
re f f Raio efetivo da roda [m]
VCdG Velocidade do CdG do veículo [m· s−1]
Vx,Vy Velocidade longitudinal/lateral do veículo [m· s−1]
α Ângulo de deslizamento individual de cada roda/pneu [rad]
β Ângulo side-slip do veículo (ângulo entre o eixo x do CdG e VCdG)[rad]
γ1, γ2 Constantes positivas utilizadas para definir ganho adaptativo
δ Ângulo de direção das rodas dianteiras [rad] δw Variável alternativa para representar δ [rad]
µ Coeficiente de atrito entre o pneu e estrada
χ Ângulo pitch (movimento de rotação em torno do eixo y do CdG ) [rad] ϕ Ângulo roll (movimento de rotação em torno do eixo x do CdG ) [rad] ψ Ângulo yaw (movimento de rotação em torno do eixo z do CdG ) [rad]
˙
ψ Yaw Rate[rad· s−1]
ξ(t, x) Variável que define as incertezas do modelo e de medição
ξ0, ξ1 Constantes positivas que definem as incertezas do modelo e medição
ρ Raio de curvatura do veículo [m] ω Velocidade angular da roda [rad· s−1]
˙
Capítulo 1
Introdução
O presente capítulo tem como objetivo realizar uma introdução ao trabalho desenvolvido ao longo da dissertação. É apresentada a motivação para o desenvolvimento do tema em estudo na secção 1.1. De seguida, na secção 1.2, são apresentados de forma sucinta os objetivos do trabalho. A descrição das contribuições do trabalho desenvolvido são apresentadas na secção 1.3. Finalmente, a estrutura do documento é descrita na secção 1.4.
1.1
Motivação
Após a 2aGuerra Mundial o mundo passou a conhecer a importância dos sistemas tecnológi-cos. Desde então, a complexidade destes tem aumentado de uma forma crescente [1]. Os sistemas tradicionais de controlo por realimentação quando aplicados a sistemas complexos podem originar deficiências ao nível do desempenho, principalmente quando sujeitos a falhas nos seus transdu-tores e/ou atuadores [2]. A atual dependência de sistemas tecnológicos complexos sobre projetos de controlo originou a necessidade de desenvolvimento de novas técnicas de controlo que tenham em conta características de eficiência, segurança e redundância. Estas características são parti-cularmente importantes para setores que trabalham com níveis de segurança críticos, tais como a indústria aeronáutica, aeroespacial, automóvel e de produção de energia.
Numa perspectiva histórica, os acidentes de Three Mile Island (28 Março, 1979) e de Cher-nobyl(26 Abril, 1986) destacaram a necessidade de evolução dos sistemas de controlo existentes até à data. Em ambos os casos foi concluído que os sistemas de controlo utilizados não conse-guiam fornecer garantias sobre a total segurança do sistema. Para contrariar esta falta de segurança foi necessária a introdução de novos conceitos, tais como controlo robusto, diagnóstico de falhas, entre outros, os quais pretendem assegurar níveis de confiança e segurança mais elevados [1].
Atualmente o nível de exigência dos consumidores, a qualidade e fiabilidade de serviço exigida origina que outros setores da economia necessitem também de utilizar alguns dos novos conceitos de controlo tolerante. Um exemplo disso é o setor da indústria automóvel, o qual tem vindo a aplicar estes conceitos de forma a melhorar o desempenho e segurança do veículo. Em particular, na área dos veículos elétricos com múltiplos propulsores, em que a probabilidade de ocorrência de
e os prejuízos económicos associados são tremendos, justificando esforços na procura de soluções técnicas que visam aumentar a segurança rodoviária. As principais causas que contribuem para a maioria dos acidentes são [5]: falhas nos equipamentos do próprio veículo, topologia da estrada, manutenção insuficiente da via e comportamento do condutor. De forma a aumentar a segurança rodoviária, a aplicação de sistemas de controlo tolerante a falhas (CTF ) deve ser considerada. A utilização destas técnicas permite a minimização do efeito das falhas nos equipamentos do veículo e a consequente redução da probabilidade de ocorrência de acidentes rodoviários.
Considere-se um veículo elétrico multi-motor com os quatro motores dispostos nas quatro ro-das. Para um determinado instante ocorre uma falha no sistema de propulsão de um dos motores, como por exemplo a perda de geração de binário. Esta falha, originará uma diferença na distribui-ção de forças e em consequência, levará ao desvio da trajetória normal do veículo. A Figura 1.1 pretende demonstrar a situação descrita. Em casos como o descrito anteriormente, a aplicação de um sistema de CTF permite minimizar efeito da falha ocorrida no veículo, contribuindo para o aumento da segurança rodoviária.
Os veículos elétricos (VE ) têm atraído nos últimos anos um grande interesse não só ao nível académico mas também ao nível industrial devido a questões ambientais e à elevada dependência
1.2 Objetivos da Dissertação 3
energética da sociedade contemporânea [6, 7]. Estes, em comparação com os veículos de combus-tão possuem duas grandes vantagens [8]:
1. O binário dos motores elétricos é controlado de uma forma mais precisa e com um tempo de resposta mais rápido do que o binário dos veículos convencionais (veículos a combustão). 2. É possível ter rodas individuais, ou seja, o binário de cada roda pode ser controlado
indivi-dualmente levando assim melhorias no controlo da dinâmica do VE .
A indústria automóvel de passageiros tem desenvolvido esforços consideráveis para introduzir no mercado um veículo elétrico que seja capaz de fornecer garantias de desempenho equivalentes ao dos veículos tradicionais [6]. Atualmente já existem alguns modelos a serem comercializados tais como o Nissan Leaf, o Mitsubishi iMIEV ou o Fluence Z.E da Renault. Estas soluções utili-zam um único propulsor, contudo é expectável que no futuro exista uma evolução para soluções com múltiplos propulsores [9]. Assim, torna-se necessário implementar, nestes novos veículos, técnicas de CTF que permitam aumentar a fiabilidade e segurança de modo a tornar esta tecnolo-gia "sustentável"e desejável no futuro. Na verdade o módulo de tolerância a falhas num veículo elétrico é vital, pois é essencial evitar situações catastróficas tais como a perda de direção, perda de tração numa roda, falhas no sistema de propulsão, entre outros. Na sequência deste aspecto, os trabalhos de Mutoh e Nakano [10], demonstram a partir de simulações para um veículo elétrico multi-motor, que as falhas ocorridas num sistema de propulsão levam à perda de estabilidade do veículo em causa, originando situações perigo rodoviário.
Constitui assim como motivação desta dissertação, o desenvolvimento de um sistema de con-trolo tolerante a falhas aplicado a um veículo elétrico multi-motor. Este tipo de solução tecnoló-gica poderá ser utilizada para garantir a estabilidade do veículo e consequentemente a segurança do passageiro perante o aparecimento de uma falha nos atuadores dos motores.
1.2
Objetivos da Dissertação
Pretende-se com a presente dissertação desenvolver um conjunto de estudos preliminares sobre a formulação de um CTF . Assim, os objetivos propostos para o trabalho a desenvolver são:
1. Revisão e estudo de técnicas CTF ;
2. Desenvolvimento e estudo do modelo matemático que caracteriza a dinâmica de um veículo elétrico multi-motor;
3. Validação de modelo implementado recorrendo a ferramentas de simulação numérica; 4. Projeto e implementação topologia de CTF ;
5. Desenvolvimento de plataforma computacional para validação e testes do sistema de con-trolo desenvolvido;
1.4
Estrutura do documento
A presente dissertação encontra-se dividida em sete capítulos que descrevem o trabalho de-senvolvido. Os assuntos técnicos relacionados com CTF e diagnóstico são introduzidos no capí-tulo 2. Neste capícapí-tulo são apresentados os conceitos básicos de CTF , desde as topologias básicas aos métodos de classificação de sistemas CTF . É também realizada uma descrição de processos de diagnóstico para CTF .
No capítulo 3 é apresentado de forma detalhada o processo de obtenção de um modelo ma-temático que caracteriza a dinâmica de um veículo de quatro rodas. É realizada uma revisão dos principais modelos existentes, tais como o modelo completo e o modelo da bicicleta, e de seguida é estabelecido um modelo matemático que caracteriza o veículo elétrico multi-motor. É também realizada a validação do modelo formulado recorrendo-se a uma co-simulação entre as ferramentas Matlab/Simulinkr e CarSimr.
Com o objetivo de compreender melhor o comportamento do veículo elaborou-se no capítulo 4 uma análise do modelo matemático estudado. A análise efetuada engloba a dedução das funções transferência, análise do comportamento em regime permanente perante diferentes características de comportamento do veículo e finalmente uma análise da sensibilidade paramétrica do modelo.
No capítulo 5 é definido de forma detalhada projeto do sistema de controlo proposto. São tam-bém introduzidos neste capítulo alguns conceitos de controlo de modo de deslizamento utilizados para o desenvolvimento do CTF .
No capítulo 6 apresentam-se os resultados obtidos utilizando as duas plataformas computaci-onais desenvolvidas. Com o intuito de avaliar e caracterizar o desempenho do sistema de controlo proposto, são realizados um conjunto de ensaios que correspondem a diferentes tipos de manobras passíveis de serem realizadas por um condutor.
Finalmente, no capítulo 7 são apresentadas as conclusões do trabalho realizado e indicados os desenvolvimentos futuros.
Capítulo 2
Revisão Bibliográfica
O presente capítulo sistematiza o levantamento bibliográfico dos principais assuntos técnicos relacionados com a temática da dissertação. No decorrer do capítulo serão apresentados os concei-tos e noções essenciais para o desenvolvimento de sistemas de controlo tolerante a falhas. No final do capítulo será descrita uma breve visão geral das principais referências para o desenvolvimento de sistemas de controlo tolerante a falhas aplicados em veículos elétricos multi-motores.
2.1
Introdução
Genericamente, uma falha é algo que altera o comportamento de um processo tecnológico de forma a que o sistema não cumpra os objetivos para o qual foi desenhado [11]. Habitualmente as falhas são classificadas pela sua origem, natureza temporal e a forma de como são modeladas [1]. As últimas duas classificações referenciadas serão estudadas em secções posteriores. Quanto à sua origem podem ser falhas internas ( fi) ou falhas externas ( fe), esta distinção encontra-se
repre-sentada na Figura 2.1. A título de exemplo, problemas na alimentação de um componente podem ser identificados como falhas de origem interna, enquanto que variações no ambiente, tal como aumento da temperatura e que resultam em eventos não desejados no sistema, podem ser classifi-cadas como falhas de origem externa. Assim, deve-se ter em conta que em qualquer um dos casos a falha é a principal causa de alterações na estrutura e/ou parâmetros do sistema, originando um desvio face ao desempenho esperado [11]. De forma a evitar ou minimizar perigos inerentes a falhas ocorridas num sistema torna-se necessário aplicar técnicas diagnóstico e controlo tolerantes a falhas.
Os sistemas tecnológicos complexos podem ser considerados como uma integração de vários subsistemas. O desempenho global de um sistema tecnológico é a soma dos desempenhos dos subsistemas que o constituem. Caso ocorra uma falha num subsistema é possível afirmar que o desempenho global é alterado [11]. De forma a evitar situações catastróficas em casos de ocorrên-cia de falhas estas devem ser identificadas o mais rapidamente possível e o seu efeito minimizado, tornando o sistema global tolerante a falhas [11]. A inclusão de técnicas de controlo tolerante a falhas veio contribuir a solução deste problema [11, 12].
Figura 2.1: Estrutura de sistema tolerante a falhas
O principal objetivo dos métodos de controlo tolerante a falhas é o projeto de um controlador com uma estrutura adequada que mantenha a estabilidade e garanta um desempenho satisfatório. Este projeto deve ser aplicado não apenas quando todos os componentes de controlo estão opera-cionais, i.e. sistema sem falhas, mas também quando se verifique a ocorrência de uma falha nos atuadores, sensores ou mesmo no próprio processo.
Do ponto de vista da teoria dos sistemas, o controlo tolerante a falhas consiste na interação entre um determinado sistema (Processo/Planta) e um controlador tolerante [11], a Figura 2.1 pretende representar a interação descrita. Como referido anteriormente, uma falha pode ser clas-sificada como sendo de origem externa ( fe) ou de origem interna ( fi), o seu conjunto forma uma
falha f que altera o comportamento normal de um sistema. A função controlador representado é analisar o comportamento do processo, identificar as falhas e manipular as grandezas do processo de forma a manter o sistema em malha fechada dentro de uma região de desempenho aceitável.
De uma forma genérica, Blanke [11] identifica que o processo de tornar um sistema tolerante a falhas consiste na implementação de dois passos:
• Diagnóstico de falhas: A existência de falhas deve ser detetada e as suas características identificadas;
• Reconfiguração do controlador: O controlador deve adaptar-se à situação de falha de forma a manter um desempenho satisfatório do sistema.
Recentemente, o estudo elaborado em [13] indicou a utilização sistemas CTF como uma me-todologia de controlo indicada para os atuais e futuros processos tecnológicos. Nesta referência é indicada que o desenvolvimento de sinergias entre as tradicionais estratégias de controlo e meto-dologias CTF possibilita o aumento do desempenho no qual estas metometo-dologias são aplicadas.
2.2 Conceitos Básicos e Terminologia 7
2.2
Conceitos Básicos e Terminologia
A técnica de tolerância a falhas é utilizada para aumentar a confiabilidade de um sistema [14]. A confiabilidade é um conceito que integra quatro áreas a saber: fiabilidade, disponibilidade, segurança e proteção [15]. Em seguida, apresenta-se de forma sintética os conceitos envolvidos em cada uma das áreas.
• Fiabilidade é a capacidade de um sistema, quando necessário, manter o correto funciona-mento de todos os processos.
• Disponibilidade é a capacidade de um sistema executar qualquer tarefa quando necessário. • Segurança é a característica que qualifica a capacidade de evitar anomalias catastróficas
que podem envolver humanos ou custos excessivos.
• Proteção é a capacidade de um sistema de prevenir acessos não autorizados.
Existem ainda outros autores [16, 17] que consideram uma característica adicional, a noção de manutenção. A manutenção consiste na necessidade de reparação do sistema e na facilidade com que esta pode ser feita.
A terminologia de algumas das áreas referidas anteriormente pode ter variações entre diver-sos autores, note-se o exemplo de Mahmoud [18] que chegou a quantificar matematicamente o conceito de disponibilidade (A) representado pela relação expressa em Eq. (2.1).
A= MT BF
MT BF+ MT T R (2.1)
em que MTBF indica o tempo entre as avarias, e MTTR o tempo gasto para reparação.
Outros conceitos e/ou noções de sistemas de CTF devem ser introduzidos para uma correta contextualização do tema em estudo. De seguida são apresentados alguns desses conceitos:
• Controlo Adaptativo: Uma abordagem sistemática para o estabelecimento de um controla-dor em que os parâmetros e/ou leis são ajustadas em tempo real de forma a atingir ou manter o nível desejado de desempenho do sistema;
• Controlo Robusto: Capacidade de um sistema manter um desempenho satisfatório na pre-sença de variações paramétricas e/ou perturbações externas;
• Monitorização: Uma tarefa contínua em tempo-real para determinar as condições de um sistema físico.
• Redundância Analítica: Uso de mais de um método, não necessariamente idênticos para determinar uma variável, onde são aplicados os modelos matemáticos de um processo de uma forma analítica. A redundância analítica é normalmente aplicada com recurso a obser-vadores matemáticos. Para este tipo de redundância não existe a implementação adicional de hardware;
• Sintoma: Alteração do comportamento normal de uma variável observada;
2.3
Falhas, Avarias e Comportamento de Sistema
Em primeiro lugar, torna-se necessária a distinção entre os termos falha e avaria. A definição dada para o presente documento tem por base a definição apresentada pelo comité técnico IFAC SAFEPROCESS (ver referências [2, 19]) que foi desenvolvida de forma a definir uma norma padrão [20] para as áreas de controlo com o objetivo de reduzir conflitos de terminologia entre os investigadores. Esta definição irá permitir o uso destes termos para a apresentação dos conceitos e noções de sistemas de CTF em posteriores secções. O comité técnico IFAC, tal como descrito em [2] assume as seguintes definições para os termos de falha e de avaria:
• Falha: um desvio não permitido ao comportamento aceitável ou normal, de pelo menos uma propriedade característica ou parâmetro do sistema;
• Avaria: uma interrupção permanente da capacidade do sistema realizar uma determinada função quando sujeito a determinadas condições de operação;
Das duas definições apresentadas é possível concluir que uma avaria produz um efeito mais severo do que uma falha. Tome-se o exemplo da ocorrência de uma falha num atuador, neste caso o atuador ainda é utilizável mas terá uma resposta mais lenta ou será menos eficiente. Uma avaria no mesmo atuador torna necessário a sua substituição de forma a que seja mantido um desempenho satisfatório do sistema. Para o presente trabalho apenas se terá em conta a ocorrência de falhas, assim para os restantes capítulos as variações face ao comportamento normal do sistema serão designadas de falhas.
Considere-se um sistema dinâmico como o representado na Figura 2.2. Este sistema tem um conjunto de entradas e saídas e uma relação entre elas descrita por equações dinâmicas. Para um determinado instante de tempo, torna-se possível definir um par ordenado (I,O) em que o primeiro elemento corresponde à entrada e o segundo elemento corresponde à saída do sistema. O conjunto destes pares ordenados define o comportamento do sistema.
Seja U , o conjunto que define a gama dos sinais de entrada e Y o conjunto que define a gama dos sinais de saída, então o comportamento do sistema é definido pelo produto cartesiano
2.3 Falhas, Avarias e Comportamento de Sistema 9
Figura 2.2: Exemplo de sistema
representado porU × Y [11, 21] e pode ser ilustrado pela Figura 2.3. O ponto A representa um par ordenado (I/O) na zona de funcionamento desejável, enquanto que B representa um ponto de funcionamento indesejável ou inconsistente.
Figura 2.3: Interpretação gráfica de comportamento de sistema (Adaptado [11, 21]) A título ilustrativo considere-se um sistema estático descrito pela seguinte equação:
y(t) = ks· u(t) (2.2)
em que ks é o ganho estático, e u(t) e y(t) são respetivamente a entrada e saída do conjunto de
todos os pares ordenados possíveis C, definido como:
C={(u,y) : y = ks· u} u(t),y(t) ∈ R (2.3)
Geometricamente esta equação é representada graficamente por uma linha reta no sistema de coordenadas u, y. Assim, a Eq. (2.2) representa os valores possíveis que satisfazem os pares I/O. Caso a equação não seja satisfeita, ou seja, y(t)6= ks· u(t), então é possível afirmar que ocorreu
uma falha no sistema. Graficamente, a situação de avaria seria então caracterizada por outra região no plano.
O desempenho de um sistema pode ser descrito por duas variáveis y1e y2[11], tal como
repre-sentado na Figura 2.4. Na região necessária de desempenho (Region of the required performance) o sistema satisfaz a sua função e deve manter-se nesta região em todo o tempo de operação. O controlador aplicado mantêm o sistema nesta região apesar das incertezas do modelo matemático e perturbações exteriores. A região de desempenho reduzido (Region of degraded performance)
Figura 2.4: Regiões de desempenho de um sistema [11]
2.4
Classificação das Falhas
Genericamente um sistema pode ser divido em três subsistemas: atuadores, processo, e senso-res [11, 22]. Em 2003, Blanke [11] classificou de uma forma geral as falhas passíveis de ocorrerem num sistema, como ilustrado na Figura 2.5. Considerando os três principais subsistemas descritos tem-se:
• Falhas no Processo: Este tipo de falha altera as propriedades dinâmicas das entradas/saídas do sistema;
• Falhas nos Atuadores: As propriedades do processo não são afetadas, no entanto a influên-cia do controlador na planta pode ser interrompida ou modificada. No esseninfluên-cial, provocam uma perda parcial ou total da ação dos atuadores introduzindo um desvio face ao valor desejado ou uma diminuição da gama de funcionamento do atuador;
• Falhas nos Sensores: As propriedades do processo não são afetadas, no entanto as leituras dos sensores têm erros substanciais. Este tipo de falhas representa uma incorreção no valor medido de uma grandeza do processo;
2.4 Classificação das Falhas 11
Figura 2.5: Distinção entre falhas nos atuadores, planta e nos sensores (Adaptado [11])
As falhas dos três subsistemas podem ser ainda classificadas tendo em conta a sua natureza temporal e a forma como são modeladas. Assim, em termos temporais são descritas em três tipos: abruptas, incipientes e intermitentes [22]. Exemplos deste tipo de falhas são respetivamente o corte abrupto de alimentação de um sistema, degaste contínuo de um componente e contactos elétricos intermitentes num sistema. Por sua vez, a Figura 2.6 exemplifica de forma gráfica uma classificação para o comportamento temporal das falhas.
Figura 2.6: Classificação de falhas pelo seu comportamento temporal a) Falha Abrupta b) Falha incipiente c) Falha intermitente (adaptado [22])
Relativamente à classificação das falhas quanto à forma de como são modeladas podem ser descritas como falhas aditivas e falhas multiplicativas. A Figura 2.7 ilustra essa classificação.
Figura 2.7: Modelos básicos das falhas: a) falhas aditivas b) falhas multiplicativas (adaptado [22])
As falhas aditivas influenciam a variável Y pela adição de uma falha f , enquanto que as falhas multiplicativas influenciam a variável Y pelo produto com outra variável U com a falha f .
Figura 2.8: Áreas de investigação para CTF (adaptado [12])
2.5
Controlo Tolerante a Falhas
Historicamente, a utilização e desenvolvimento de trabalhos de investigação de estratégias de CTF tem sido realizada para a procura de soluções em sistemas onde a segurança é um fator crítico. Exemplos destes sistemas são a indústria aeroespacial, aeronáutica e centrais nuclea-res [23]. Patton [12], identificou que a principal razão do desenvolvimento de sistemas de CTF foi particularmente motivada pelos problemas encontrados no projeto de sistemas aeronáuticos. Recentemente, outras áreas tecnológicas tem aplicado este tipo de técnicas com sucesso, tal como a robótica [24], ou mesmo em veículos subaquáticos controlados remotamente (ROV - Remotely Operated Vehicles) [25].
Os sistemas CTF são uma combinação complexa de três principais áreas de investigação [12]: deteção e diagnóstico de falhas (DDF ), controlo robusto e controlo reconfigurável. Esta combina-ção encontra-se ilustrada na Figura 2.8. Os sistemas DDF tem como o objetivo detetar e identificar a origem da falha. A informação da identificação da falha é depois transmitida para um mecanismo de reconfiguração. O controlador reconfigurável tentará adaptar-se à falha ocorrida com o obje-tivo de manter a estabilidade e desempenho do sistema. Deve notar-se que ambos, sistema DDF e controlador reconfigurável, devem ser robustos perante incertezas e perturbações. Por sua vez, o controlador robusto encontra-se diretamente relacionado com os controladores passivos [12] (ver subsecção 2.5.1).
De forma a identificar os subsistemas constituintes de um sistema CTF , Blanke [11] propôs a definição de uma arquitetura genérica para um CTF , esta encontra-se ilustrada na Figura 2.9. Da organização descrita é possível identificar dois grandes níveis, um nível de supervisão e um nível de execução. No nível de supervisão encontram-se dois blocos principais: o bloco de Restrutu-ração do Controlador e o bloco de Diagnóstico. O primeiro bloco resulta em novos parâmetros do controlador, mas também pode resultar numa nova configuração da estrutura de controlo. Para o caso do bloco de Diagnóstico, têm-se que este atua como um filtro que processa os sinais das entradas e saídas do processo/planta do sistema no sentido de detetar e isolar as falhas. Como saída, o bloco de Diagnóstico caracteriza a falha ocorrida e envia essa informação para o bloco de
2.5 Controlo Tolerante a Falhas 13
restruturação do controlador. Assim, o nível de supervisão consiste num bloco de diagnóstico que identifica a falha ocorrida e num bloco de reestruturação do controlador que ajusta o controlador à nova situação. Ou seja, este nível torna o controlo em malha fechada tolerante a falhas.
Uma excelente revisão bibliográfica sobre CTF foi realizada por Zhang e Jiang [1]. O artigo realiza uma revisão histórica dos sistemas CTF e a respetiva classificação baseada nas ferramentas matemáticas e métodos de projeto utilizados.
Figura 2.9: Arquitetura clássica de controlo tolerante a falhas
2.5.1 Classificação de Sistemas de Controlo Tolerante a Falhas
Os autores Zhang e Jiang [1] e Patton [12] classificam de forma esquemática os sistemas de controlo tolerante a falhas (SCTF ) tal como ilustrado na Figura 2.10. Em geral os SCTF podem ser classificados em dois tipos: passivos (SCTFP ) e ativos (SCTFA ) [1]. No caso dos SCTFP , o projeto de controlo é concebido de forma a ser robusto perante falhas e incertezas. Assim, quando ocorre uma falha o controlador deve conseguir manter a estabilidade do sistema com apenas uma degradação aceitável do desempenho [23]. Os SCTFP não necessitam de um sistema de diag-nóstico e identificação de falhas e em muitos casos não é necessária a reconfiguração do próprio controlador. Ao contrário, os SCTFA reagem ativamente perante falhas reconfigurando as ações de controlo de forma a manter a estabilidade e desempenho de todo o sistema [1]. Assim, os SCTFA necessitam de um sistema de diagnóstico de forma a obter a informação de uma falha antes da reconfiguração do controlador acontecer.
Para o caso dos SCTFA ainda é possível dividir este método em duas classes: métodos ba-seados no projeto, e métodos de reconfiguração automática dos parâmetros do controlador. O primeiro método consiste na implementação de leis de controlo pré-computadas que são selecio-nadas de acordo com a estrutura de controlo necessária, ou seja, a seleção depende do tipo de falha que tenha sido isolada. Por sua vez, o segundo método consiste no cálculo automático de novos parâmetros do controlador em resposta à ocorrência de uma falha.
Figura 2.10: Classificação dos sistemas de controlo tolerantes a falhas (SCTF) (adaptado [18])
2.5.1.1 Sistemas de Controlo Tolerante a Falhas Passivos (SCTFP )
Neste método, o sistema tolera apenas um conjunto limitado de falhas que se assumem serem conhecidas à priori. Quando o controlador é desenvolvido, este apenas pode compensar o sistema perante falhas conhecidas e sem acesso a uma informação em tempo real das falhas. No essencial o projeto de CTF passivo baseia-se em técnicas de controlo robusto, que garantem que o sistema em malha fechada seja insensível a determinadas falhas. Por outras palavras, os SCTFP trata as falhas como incertezas de modelação [18].
Em geral, os SCTFP possuem as seguintes características [12]: 1. Robustos perante falhas previamente conhecidas;
2. Utilizam essencialmente redundância ao nível do hardware;
3. Não necessitam de um sistema de deteção e diagnóstico de falhas (DDF );
Os métodos passivos utilizam técnicas de controlo robusto de forma a assegurar que o sistema de malha fechada se mantenha insensível a determinadas falhas mantendo os parâmetros do con-trolador constantes [12]. Assim, o sistema afetado continua a operar com o mesmo concon-trolador e a mesma estrutura inicial.
A eficiência deste tipo de métodos está diretamente relacionada com a robustez nominal (livre de falhas) do sistema em malha fechada. Uma das formas de aumentar a eficiência destes métodos é realizar uma combinação com métodos de controlo confiável [12].
2.5.1.2 Sistemas de Controlo Tolerante a Falhas Ativos (SCTFA )
Nos sistemas de controlo mais convencionais, os controladores são idealizados considerando que o sistema é livre de avarias. Em outros casos, o sistema possui uma redundância física limitada que não permite alterações ao nível da configuração e ao nível físico. É neste tipo de sistemas que
2.5 Controlo Tolerante a Falhas 15
Figura 2.11: Subsistemas constituintes de sistemas de controlo tolerante a falhas ativo
os SCTFA são aplicados, pois utilizam a redundância física e analítica do sistema de forma a adaptar o sistema a falhas não previstas.
Tipicamente, a estrutura de um SCTFA pode ser dividida em quatro subsistemas: controlado-res reconfiguráveis, esquema de DDF , mecanismo de controlo reconfigurável, regulador referên-cia/comando [1]. Esta divisão encontra-se descrita na Figura 2.11. A inclusão dos esquemas DDF bem como os controladores reconfiguráveis na estrutura geral de um sistema SCTFA é uma das principais características de distinção entre os SCTFA e os SCTFP .
Para o projeto de um SCTFA é necessário considerar os seguintes fatores:
• O controlador deve ser facilmente reconfigurável;
• Possuir um esquema DDF com elevada sensibilidade às falhas;
• Esquema DDF robusto face às incertezas do modelo, variações nas condições de operação e perturbações externas;
• Possuir um mecanismo de reconfiguração que possibilita a máxima recuperação possível do sistema pré-falha na presença de incertezas e atrasos do esquema DDF ;
A Figura 2.12 representa a arquitetura geral de um SCTFA [1, 18]. Assim, quando uma falha ocorre quer nos atuadores ou nos sensores, o esquema de DDF deve detetar e localizar a origem da falha. Esta informação é transmitida para um mecanismo de início de reconfiguração. O controlador reconfigurável irá tentar adaptar-se à falha ocorrida mantendo a estabilidade do sistema. De forma a manter algum nível de desempenho é importante que ambos os blocos de DDF e controlador reconfigurável sejam robustos perante incertezas e perturbações.
Zhang e Jiang [1] enumeraram as técnicas mais utilizadas para o desenvolvimento de SCTFA ( ver Tabela 2.1). Naturalmente, dada a natureza e âmbito da dissertação não foram estudadas todas as técnicas referências na Tabela 2.1, optou-se assim por aprofundar a técnica de controlo por modo de deslizamento (Sliding Mode).
Figura 2.12: Estrutura geral de um sistema de controlo tolerante a falhas ativo [1]
Tabela 2.1: Técnicas de desenvolvimento para sistemas de controlo tolerante a falhas ativo Técnica de Desenvolvimento
Linear Quadratic Regulator– LQR Pseudo-Inverse– PI Intelligent Control– IC Gain Scheduling– GS Model Following– MF Adaptative Control– AC Multiple Model– MM
Integrated diagnostic and control– IDC Eigenstructure Assignment– (EA)
Feedback Linearization– (FL) / Dynamic Inversion – DI Robust Control H∞
Model Predictive Control– MPC Quantitative Feedback Theory– QTF
Linear Matrix Inequality– LMI
Variable Structure Control– VSC / Sliding Mode Control – SMC Generalized Internal Model Control– GIMC
2.5.2 Diagnóstico e Deteção de Falhas
Nesta subsecção serão apresentados as terminologias associadas com o módulo responsável pelo DDF . O diagnóstico e deteção de falhas consiste na deteção do tipo de falha com o máximo
2.5 Controlo Tolerante a Falhas 17
de detalhe possível, tal como a amplitude da falha, a sua localização e o instante de tempo em que ocorreu [22]. O comité técnico IFAC, como definido em [2], assume os seguintes conceitos:
• Deteção de falha: determinação da presença de falhas num sistema e respetivo tempo de deteção;
• Diagnóstico de falha: determinação do tipo, da dimensão, localização e deteção do instante temporal de ocorrência de falha;
Existem na literatura várias metodologias desenvolvidas para sistemas de DDF . A Figura 2.13 ilustra de forma esquemática a classificação proposta em [2, 20]. Para a presente dissertação não são apresentadas de forma detalhada todas as técnicas referidas, uma vez que estas se encontram descritas de forma mais detalhada nos trabalhos elaborados por Zhang e Jiang [1] e por Alwi [23]. Assim, apenas se irá discutir de forma introdutória algumas das metodologias identificadas na Figura 2.13.
Figura 2.13: Classificação de sistemas DDF (adaptado [23])
2.5.2.1 Métodos Baseados em Modelos
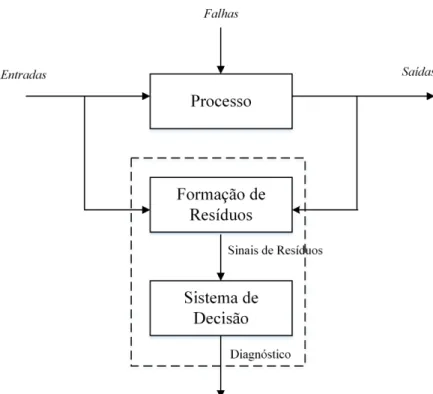
As metodologias DDF baseadas em modelos encontram-se bem estudadas na literatura. Nas referências [22, 26, 27, 28] é possível encontrar estudos completos sobre a utilização destes mé-todos. De acordo com [6, 10], as metodologias baseadas em modelos são bastante utilizadas e são realizadas em dois passos principais: geração dos resíduos e avaliação dos resíduos. Um exem-plo de uma estrutura básica para um método de diagnóstico de falhas baseado em modelos para um veículo elétrico encontra-se ilustrado na Figura 2.14. Baseado-se nas medidas dos sinais de entrada U e nos sinais de saída Y, os métodos de deteção geram os resíduos r, a estimação de parâmetros ˆΘΘΘ e dos estados estimados ˆˆˆ xˆxˆx. Comparando estas características com as características normais é possível verificar o ocorrência de variações, levando assim à formação de um sintoma analítico [26] que identifica uma alteração face ao comportamento normal.
Analisando novamente a Figura 2.13, é possível dividir as metodologias baseadas em mode-los em duas classes: geração de resíduos e estimação de falhas. De seguida são apresentadas brevemente algumas definições sobre as classes identificadas.
Figura 2.14: Estrutura básica de um esquema DDF baseados em modelos (adaptado [6])
Métodos Baseados em Geração de Resíduos
A Figura 2.15 representa a estrutura conceptual de um modelo de diagnóstico de falhas para um sistema DDF baseado em modelos com recurso a métodos de geração de resíduos.
O resíduo, r(t), é um sinal que transporta informação do tempo e localização da falha. Este deve assumir o valor nulo para o caso em que não existe falhas e ser diferente de zero quando ocorrem falhas. O processo de decisão avalia os resíduos e monitoriza a razão e localização da falha. Definindo por J(r(t)) e T (t) respetivamente como sendo a função de decisão e o limite de decisão, é possível a deteção de uma falha aplicando a seguinte relação:
J(r(t))≤ T (t) para f (t) = 0
J(r(t)) > T (t) para f (t)6= 0 (2.4) Para isolar uma falha específica, relacionada aqui com o índice i e para um número q de falhas possíveis, é aplicada a Eq. (2.5).
J(ri(t))≤ Ti(t) para fi(t) = 0 J(ri(t)) > Ti(t) para fi(t)6= 0 (2.5) com i = 1, 2, 3,.., q.
Os métodos mais comuns utilizados para a formação de resíduos são [29]: • Formação de resíduos baseados em observadores.
2.5 Controlo Tolerante a Falhas 19
Figura 2.15: Estrutura conceptual de um modelo de diagnóstico de falhas
O método de geração de resíduos baseados em observadores consiste na estimação do estado ou das saídas de um sistema a partir de medições no próprio sistema. Esta técnica pode ser clas-sificada em duas vertentes: forma determinística [30] (utilização de observadores de Luenberger), e de forma estocástica [31] (utilização de filtros de Kalman). Os métodos baseados em equações de paridade foram inicialmente propostos por Chow e Willsky [32]. Estes métodos consistem na validação da paridade (consistência) das medidas do sistema monitorizado. Vários artigos foram escritos sobre estes métodos [33, 34].
Existem bastantes vantagens na utilização de métodos baseados em geração de resíduos. Atu-almente o estado de maturação de algumas das técnicas utilizadas para a formação de resíduos permitem a fácil implementação deste tipo de técnicas. Vários estudos foram efetuados com a utilização de esquemas de DDF baseados em geração de resíduos. Chen e Patton com a referên-cia [20] elaboram uma importante discussão sobre a utilização de esquemas DDF baseados em geração de resíduos para o controlo tolerante a falhas.
Métodos Baseados em Estimação de Falhas
Alguns sistemas de CTF tal como proposto em [35, 36], necessitam da estimação da eficiência dos atuadores de forma a que o sistema consiga tolerar falhas. Um estrutura genérica de uma metodologia baseada na estimação de falhas encontra-se ilustrada na Figura 2.16. De forma a compreender melhor a definição deste método apresenta-se de seguida, a título ilustrativo, um exemplo de aplicação. Considere-se um sensor onde ocorre uma falha. Se a falha poder ser estimada ou reconstruída, esta informação pode ser usada diretamente para corrigir as medidas
Figura 2.16: Estrutura genérica de método de estimação de falhas (adaptado [23])
corrompidas do sensor em falha mesmo antes de ser corrigido pelo próprio controlador. Esta característica evita assim a necessidade de reconstrução ou reconfiguração do controlador.
O filtro de Kalman é um dos exemplos mais conhecidos na utilização de métodos baseados na estimação de falhas. Este filtro atua como um observador e assim pode ser utilizado para detetar falhas.
2.5.2.2 Métodos Não Baseados em Modelos
Uma alternativa aos métodos baseados em modelos são os métodos não baseados em mode-los, ou também designados por DDF inteligente [23]. Um dos principais problemas associados ao projeto de metodologias baseadas em modelos é qualidade do modelo. Ou seja, o projeto de modelos imperfeitos ou imprecisos resulta em erros que afetam o desempenho de um esquema de diagnóstico [37, 38]. A utilização de controlo robusto baseado em modelos normalmente re-sulta em projetos demasiados conservativos e insensíveis às falhas, demasiado complicados ou limitados a uma certa gama de incertezas [23, 37]. Desde o final da década de 90 tem havido um desenvolvimento de técnicas não baseadas em modelos, especialmente em abordagens nas áreas de inteligência artificial e soft computing. Os exemplos mais comuns destas técnicas são utilização de redes neuronais e lógica difusa.
Segundo Patton [37], a utilização das técnicas de redes neuronais e lógica difusa permite traba-lhar com a informação quantitativa (numérica) e qualitativa (simbólica) do sistema monitorizado. A informação qualitativa é expressa na forma de lógica booleana ou regras if-then de lógica difusa enquanto que a informação quantitativa é expressa de forma numérica.
Uma das vantagens da utilização de métodos não baseados em modelos é a possibilidade de suportar qualquer função não linear. De facto, a utilização de redes neuronais permite a aprendi-zagem das características e/ou comportamento do sistema a partir de "exemplos"ou "treino", não necessitando assim de qualquer informação prévia e conhecimento da estrutura do sistema [37]. Duas desvantagens principais podem ser enumeradas na utilização de redes neuronais para este tipo de técnicas:
2.6 Visão Geral de CTF em Veículos Elétricos 21
• Dificuldade na incorporação do conhecimento da experiência do sistema em conhecimento heurístico;
• Falta de conhecimento do comportamento interno da rede neuronal;
2.6
Visão Geral de CTF em Veículos Elétricos
Nesta secção será apresentada uma breve visão geral das principais referências para o desen-volvimento de sistemas de CTF aplicados a veículos elétricos multi-motor no contexto da presente dissertação.
Veículos puramente elétricos, híbridos e híbridos plug-in-play tem sido referidos como ar-quiteturas promissoras devido ao seu extraordinário potencial na redução de emissões poluentes e consumo de energia [39]. Os veículos elétricos atuados independentemente nas quatro rodas (4WIA - four-wheel indepedently actuated) são considerados como uma topologia emergente e com um elevado potencial [3]. A utilização das novas topologias referenciadas em veículos elétri-cos trouxeram uma nova classe de problemas no controlo de movimento do próprio veículo. Em contraste com os tradicionais veículos baseados em combustão interna, os veículos elétricos per-mitem o controlo independente do binário de aceleração/travagem aplicado a cada roda [10]. Esta flexibilidade de controlo, combinada com a resposta rápida e precisa do motor elétrico pode ser uti-lizada para melhorar as tradicionais técnicas de controlo, tais como o controlo direto do momento externo (DCY), controlo de tração, entre outros [3, 40]. Mas os benefícios das novas topologias referidas anteriormente, são contrariados pelo aumento da probabilidade de ocorrências de falhas devido a um maior número de atuadores e consequentemente ao aumento da complexidade [3].
Historicamente, as técnicas de CTF tem sido aplicadas com uma maior frequência no setor da aeronáutica. Mas a necessidade de aumentar a segurança e fiabilidade dos veículos, especialmente nas novas topologias de veículos elétricos levou à introdução destes conceitos nestas áreas.
Vários estudos tem sido realizados sobre sistemas de CTF e DDF para veículos elétricos [41, 42, 43, 44, 45]. Mutoh em [10] desenvolveu uma estrutura failsafe em que as rodas frontais e traseiras são atuadas independentemente e o CTF é realizado de forma a manter o desempenho do veículo. Mas, a maioria dos estudos referenciados apenas trata topologias convencionais, ou seja, não estuda a implementação de algoritmos de CTF para veículos 4WIA. Recentemente os trabalhos realizados por Wang R. e Wang J. trouxeram uma nova abordagem à implementação de estruturas de CTF em veículos 4WIA. Em [3] foi proposto um sistema CTF baseado em técnicas de controlo por modo de deslizamento que aplica a informação de um sistema de diagnóstico de forma a mitigar as falhas ocorridas nos motores de um veículo 4WIA. Uma posterior iteração deste trabalho foi apresentada em 2013 [46], onde foi proposta uma topologia de controlo tolerante passivo para uma classe de sistemas sobre-atuados como é o caso da topologia 4WIA.
Outros artigos tem sido apresentados na comunidade científica para o controlo tolerante. Au-tores como Hori tem desenvolvidos esforços em trabalhos relacionados com a área de CTF para veículos elétricos multi-motor. Alguns artigos interessantes podem ser consultados em [8, 47].
controlo é concebido de forma a ser robusto perante falhas e incertezas, não necessitando para isso a inclusão de um sistema DDF . Assim, quando uma falha ocorre o controlador deve conseguir manter a estabilidade do sistema com apenas uma degradação aceitável do desempenho. Ao con-trário, os SCTFA reagem ativamente perante falhas, reconfigurando as ações de controlo de forma a manter a estabilidade e desempenho de todo o sistema. Os sistemas DDF podem ser classificados em dois tipos: métodos baseados em modelos e métodos não baseados em modelos. Atualmente, os tipos de métodos mais utilizados são os métodos baseados em modelos. A utilização extensiva deste tipo de método deve-se à facilidade de aplicação e maturação técnicas utilizadas. No final do capítulo foi apresentada uma breve descrição das referências mais oportunas da visão geral do CTF em veículos elétricos.
Capítulo 3
Modelo Matemático do Veículo
O presente capítulo tem como objetivo apresentar os fundamentos básicos dos modelos mate-máticos que descrevem a dinâmica de um veículo terrestre de 4 rodas. Revisitando os principais modelos existentes é estabelecido um modelo capaz de suportar os objetivos da dissertação. O modelo implementado é validado recorrendo a um conjunto de co-simulações efetuadas com as ferramentas de simulação Matlab/Simulinkre CarSimr.
3.1
Introdução
O estabelecimento de um modelo matemático que caracteriza a dinâmica de um veículo é fundamental ao desenvolvimento de metodologias de projeto de sistemas de controlo tolerantes a falhas. A existência destes modelos, para além de permitir o projeto de controlo, permite a execução de simulações numéricas do modelo do veículo e a respetiva avaliação do desempenho e comportamento perante a aplicação de sistemas de controlo de movimento [6, 48].
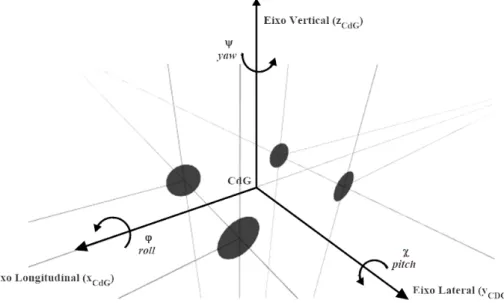
Figura 3.1: Esquemático representativo de veículo de quatro rodas e seus graus de liberdade
1. Movimento longitudinal na direção x; 2. Movimento lateral na direção y; 3. Movimento vertical na direção z;
4. Rotação em torno do eixo longitudinal, roll; 5. Rotação em torno do eixo lateral, pitch; 6. Rotação em torno do eixo vertical, yaw;
Estes podem ser agrupados em duas categorias de movimento. Um grupo inclui os movi-mentos dos pontos 1, 3, 5, que formam o estudo em termos longitudinais do veículo. Por outras palavras, são os movimentos gerados sem uma relação direta com a direção do veículo [49]. O se-gundo grupo, é aquele que está diretamente relacionado com a variação da direção do veículo, este grupo inclui os movimentos dos pontos 2 e 6, sendo que o movimento do ponto 4 é essencialmente gerado pelos dois movimentos anteriormente referidos.
3.2
Modelos do Movimento de Veículo
Nesta subsecção serão considerados os modelos matemáticos essenciais para descrição da di-nâmica de um veículo de quatro rodas. Estes modelos servirão de base para o modelo matemático estabelecido na secção 3.4 .
3.2.1 Modelo Fundamental
3.2.1.1 Equações Fundamentais
Para o desenvolvimento das equações fundamentais de um veículo de quatro rodas tem-se em consideração as seguintes hipóteses iniciais:
• É desprezado a influência do movimento vertical (fortemente dependente das suspensões); • Assume-se que os movimentos de rotação roll e pitch são nulos;
3.2 Modelos do Movimento de Veículo 25
Para a descrição do movimento de um corpo rígido torna-se necessário a definição de um sis-tema de coordenadas. Este sissis-tema depende das características particulares do corpo considerado, tais como forma, estrutura, graus de liberdade, entre outros. Contudo, uma escolha adequada dos sistemas de coordenadas permite reduzir a complexidade na obtenção das equações de movimento do corpo. Na presente dissertação serão considerados os seguintes sistemas de coordenadas:
• Referencial Inercial, sistema fixo como a Terra (XIN,YIN);
• Referencial do Veículo ou Referencial CdG, sistema com origem no CdG do veículo e que se move com o veículo (x, y);
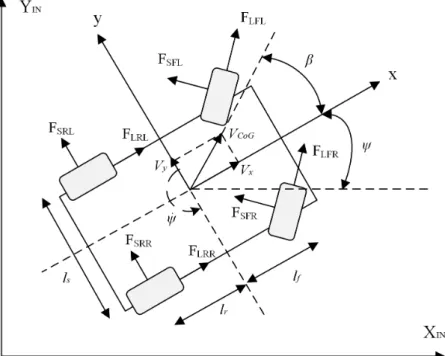
A Figura 3.2 descreve os sistemas de coordenadas adotados para um veículo de quatro rodas, bem como as principais grandezas a ele associadas. Em geral, um veículo é caracterizado por um centro de massa determinado pela distância do eixo dianteiro e traseiro ao CdG , descritos respetivamente por lf e lr. Outra grandeza utilizada é a distância entre as rodas traseiras ou
dian-teiras a qual é designada pela variável ls. O veículo possui uma velocidade linear associada ao seu
CdG , designada por VCdGque pode ser decomposta no eixo longitudinal Vxe no eixo lateral Vy. É
também caracterizado por uma massa m e por uma inércia Iz. Note-se para o presente estudo, m
representa a massa total do veículo. A orientação do veículo, ou seja, o ângulo entre o eixo x e o eixo XINé dada pela variável yaw angle ψ. A variação deste ângulo é dado pela variável yaw rate
˙
ψ . O ângulo de side-slip β , é descrito pelo ângulo entre o vetor da velocidade linear, VCdG, e o
eixo x do veículo.
Figura 3.2: Esquemático representativo dos sistemas de coordenadas de um veículo e principais grandezas a ele associadas
O veículo considerado neste trabalho assume apenas que as rodas dianteiras possuem capa-cidade direcional, tal como representado na Figura 3.3. Esta característica é definida pelos ân-gulos de direção da roda esquerda e da roda direita representadas respetivamente pelas variáveis δW L e δW R. Para a modelização do veículo assume-se que δW Le δW Rpossuem valores idênticos
(δW L = δW R). Assim, para o restante documento o ângulo de direção das rodas dianteiras será
representado apenas pela variável δ .
Figura 3.3: Esquemático representativo de ângulos de direção para rodas dianteiras Aplicando a 2a Lei de Newton é possível descrever o movimento do veículo segundo os eixos longitudinal e lateral. Considerando o referencial Inercial (XIN, YIN) observa-se que o movimento
do veículo resulta das ações das forças geradas nas quatro rodas e das forças de atrito. Para os eixos XINe YINas acelerações do veículo podem ser obtidas tendo em conta as seguintes relações:
" ¨ XIN ¨ YIN # = 1 mT −1(ψ) " FX FL+ FX FR+ FX RL+ FX RR− FwindX− FGX− FRX FY FL+ FY FR+ FY RL+ FY RR− FwindY− FGY # (3.1)
Onde as forças FX jwe FY jw representam as forças geradas pelos pneus segundo a orientação
do sistema de coordenadas do referencial Veículo, e as forças FwindX, FGX e FRX representam
![Figura 2.6: Classificação de falhas pelo seu comportamento temporal a) Falha Abrupta b) Falha incipiente c) Falha intermitente (adaptado [22])](https://thumb-eu.123doks.com/thumbv2/123dok_br/15480038.1037596/33.892.153.790.532.692/figura-classificação-comportamento-temporal-abrupta-incipiente-intermitente-adaptado.webp)
![Figura 2.12: Estrutura geral de um sistema de controlo tolerante a falhas ativo [1]](https://thumb-eu.123doks.com/thumbv2/123dok_br/15480038.1037596/38.892.111.747.140.444/figura-estrutura-geral-sistema-controlo-tolerante-falhas-ativo.webp)
![Figura 2.14: Estrutura básica de um esquema DDF baseados em modelos (adaptado [6])](https://thumb-eu.123doks.com/thumbv2/123dok_br/15480038.1037596/40.892.219.632.149.495/figura-estrutura-básica-esquema-ddf-baseados-modelos-adaptado.webp)
![Figura 3.11: Raios diferenciais utilizados para determinar as velocidades da roda (adaptado [48])](https://thumb-eu.123doks.com/thumbv2/123dok_br/15480038.1037596/60.892.290.568.141.516/figura-raios-diferenciais-utilizados-para-determinar-velocidades-adaptado.webp)