Pedro Miguel Ferreira Gomes
Licenciado em Ciências de
Engenharia Electrotécnica e de Computadores
Sistema de Detecção de Fogo e
Detecção e Seguimento de Objectos
Dissertação para obtenção do Grau de Mestre em
Engenharia Electrotécnica e de Computadores
Orientador: José António Barata de Oliveira,
Professor Auxiliar, FCT-UNL
Co-orientador: Pedro Figueiredo Santana,
Professor Auxiliar, ISCTE-IUL
Júri:
Presidente: Prof. Doutor Luís Filipe dos Santos Gomes
Vogais: Prof. Doutor José Manuel Matos Ribeiro da Fonseca Prof. Doutor José António Barata de Oliveira
Copyright
Sistema de Detecc¸ ˜ao de Fogo e Detecc¸ ˜ao e Seguimento de Objectos
A Faculdade de Ci ˆencias e Tecnologia e a Universidade Nova de Lisboa t ˆem o direito, perp ´etuo e sem limites geogr ´aficos, de arquivar e publicar esta dissertac¸ ˜ao atrav ´es de exemplares impressos reproduzidos em papel ou de forma digital, ou por qualquer outro meio conhecido ou que venha a ser inventado, e de a divulgar atrav ´es de reposit ´orios cient´ıficos e de admitir a sua c ´opia e distribuic¸ ˜ao com objectivos educacionais ou de investigac¸ ˜ao, n ˜ao comerciais, desde que seja dado cr ´edito ao autor e editor.
Agradecimentos
A elaborac¸ ˜ao de uma dissertac¸ ˜ao e a obtenc¸ ˜ao do respectivo grau de mestre ´e um trabalho bas-tante exigente. No entanto, ao longo destes ´ultimos seis anos estive rodeado de colegas e amigos que me auxiliaram na conclus ˜ao deste processo. Quero por isso expressar o meu agradecimento a todos, e em especial aos que seguidamente menciono.
Ao Prof. Jos ´e Barata o meu agradecimento pelo suporte prestado e pela oportunidade de par-ticipar num projecto ambicioso no dom´ınio da rob ´otica. Ao meu co-orientador Prof. Pedro Santana uma palavra de especial aprec¸o pelo seu apoio, motivac¸ ˜ao e, essencialmente, uma partilha de ex-peri ˆencia e conhecimento cient´ıfico. Um agradecimento pela sempre boa disposic¸ ˜ao da equipa de investigac¸ ˜ao, Gonc¸alo C ˆandido, Eduardo Pinto, Magno Guedes, Pedro Deusdado, Giovanni di Orio, Francisco Marques e Andr ´e Caves.
Agradec¸o tamb ´em a todos os colegas da Faculdade de Ci ˆencias e Tecnologia da Universidade Nova de Lisboa que ao longo destes anos se tornaram amigos, destacando Bruno Valente, Carlos Carvalhas, F ´abio J ´ulio, F ´abio Alves, Fl ´avio Dinis, Jo ˜ao Santos, Miguel Marques, Ricardo Mendonc¸a e Tiago Xavier. Um agradecimento especial ao colega de laborat ´orio e amigo, Ricardo Mendonc¸a, pelofeedbacke apoio prestados ao longo dos ´ultimos dois anos. Desejo-lhe os melhores sucessos pessoais e profissionais.
Um grande aprec¸o e gratid ˜ao `a minha fam´ılia e em especial aos meus pais, pelo apoio, motivac¸ ˜ao, suporte e carinho prestado em todas as etapas da minha vida. Uma palavra especial ao meu irm ˜ao, Jo ˜ao Gomes, pelo incentivo e forc¸a transmitida.
Um agradecimento singular `a minha namorada, Raquel Cust ´odio, pela paci ˆencia, amizade e especial carinho demonstrado ao longo destes anos.
Abstract
This dissertation presents a system for early fire detection and object tracking in live video se-quences obtained from fixed outdoor surveillance cameras. Focus is given to the challenges related to the actual deployment of the vision system. Namely, background subtraction, which is a key to determine which regions of the environment belong to the foreground, is performed in a windowed way for improved accuracy. To reduce the computational cost, an attentive mechanism is employed to focus a computationally expensive frequency analysis of potential fire regions. To promptly discrimi-nate fire regions from fire colored moving objects, a new colour-based model of fire’s appearance and a new Wavelet-based model of fire’s frequency signature are proposed. Besides that, to reduce the false alarms on fire detection of moving object with fire-colored appearance, an innovative solution to integrate the results of the two algorithms is proposed. Namely, the movement of the tracked object on the environment is analyzed. In addition, camera-world mapping is approximated according to a GPS-based learning calibration process to generate geo-located alarms, and to estimate the object height in the image plane. Experimental results demonstrate the ability of the proposed model to robustly detect fires and track moving objects, even in the presence of severe occlusions. Concre-tely, an average success rate of 92.7 % to detect fire and 92.8 % to tracking objects at a processing frequency of 10 Hz shows the applicability of the model to real-life applications.
Resumo
Esta dissertac¸ ˜ao apresenta um sistema para uma r ´apida detecc¸ ˜ao de fogo e detecc¸ ˜ao e segui-mento de objectos em tempo real, que recorre a sequ ˆencias de imagens obtidas a partir de c ˆamaras de vigil ˆancia fixas em ambientes exteriores. Os desafios relacionados com o desenvolvimento do sistema de vis ˜ao constituem o focos desta dissertac¸ ˜ao. Nomeadamente, a subtracc¸ ˜ao do plano de fundo, que ´e uma chave para determinar quais as regi ˜oes do ambiente que pertencem ao primeiro plano, ´e realizada em forma de grelha para melhorar a precis ˜ao. Para reduzir o custo computacional, um mecanismo de atenc¸ ˜ao ´e utilizado para focar uma an ´alise da frequ ˆencia nas potenciais regi ˜oes de fogo, a qual ´e computacionalmente pesada. Para uma r ´apida diferenciac¸ ˜ao entre regi ˜oes com fogo e objectos em movimento com cores semelhantes `as das chamas, um modelo de cor baseado na apar ˆencia do fogo e um modelo de an ´alise da assinatura do fogo na frequ ˆencia atrav ´es da trans-formada Wavelet s ˜ao propostos. Para reduzir os falsos alarmes na detecc¸ ˜ao de fogo provenientes de objectos em movimento com apar ˆencia semelhante ao fogo, uma soluc¸ ˜ao inovadora de integrac¸ ˜ao dos resultados dos dois algoritmos ´e proposta. Para tal, o movimento dos objectos a serem seguidos ´e analisado. Para al ´em disso, um mapeamento do plano da imagem ´e aproximado atrav ´es de um processo de calibrac¸ ˜ao baseado na aprendizagem de coordenadasGPS, permitindo gerar alarmes geo-localizados e estimar a altura dos objectos no plano da imagem. Resultados experimentais de-monstram a capacidade do modelo proposto para uma detecc¸ ˜ao robusta de fogo e seguimento de objectos, mesmo na presenc¸a de oclus ˜oes. Concretamente, uma taxa m ´edia de sucesso de 92.7 % para detectar fogo e 92.8 % para seguimento de objectos a uma taxa de processamento de 10 Hz mostra a aplicabilidade do modelo para aplicac¸ ˜oes em tempo real.
Conte ´udo
Lista de Figuras xv
Lista de Tabelas xix
1 Introduc¸ ˜ao 1
1.1 Motivac¸ ˜ao e Vis ˜ao Geral . . . 1
1.2 Objectivos . . . 2
1.3 Soluc¸ ˜ao Proposta . . . 2
1.4 Estrutura . . . 3
2 Revis ˜ao da Literatura 5 2.1 Detecc¸ ˜ao de Fogo . . . 5
2.2 Detecc¸ ˜ao e Seguimento de Objectos . . . 8
2.2.1 Detecc¸ ˜ao de Regi ˜oes de Movimento . . . 8
2.2.2 Seguimento de Objectos . . . 11
2.2.2.1 Oclus ˜oes Entre Objectos . . . 13
2.2.2.2 M ´ultiplas C ˆamaras . . . 13
3 Metodologia Proposta 15 3.1 Detecc¸ ˜ao de Regi ˜oes de Movimento . . . 16
3.2 Algoritmo de Detecc¸ ˜ao de Fogo . . . 18
3.2.1 Detecc¸ ˜ao de Regi ˜oes de P´ıxeis Com Base na Cor do Fogo . . . 18
3.2.1.1 M ´etodos de Classificac¸ ˜ao dos P´ıxeis Com Base na Cor . . . 19
3.2.1.2 An ´alise do Desempenho dos M ´etodos de Classificac¸ ˜ao dos P´ıxeis com Base na Cor . . . 22
3.2.2 Detecc¸ ˜ao de Texturas Din ˆamicas . . . 25
3.2.3 An ´alise no Dom´ınio da Frequ ˆencia . . . 29
3.2.3.1 TransformadaWaveletDiscreta no Espac¸o da Frequ ˆencia Temporal . 30 3.2.3.2 TransformadaWaveletDiscreta no Espac¸o da Frequ ˆencia Espacial . 34 3.3 Algoritmo de Detecc¸ ˜ao e Seguimento de Objectos . . . 36
3.3.1 Subtracc¸ ˜ao do Plano de Fundo . . . 37
3.3.2 Detecc¸ ˜ao de Objectos e Remoc¸ ˜ao de Sombras . . . 40
3.3.3 Seguimento de M ´ultiplos Objectos . . . 43
3.3.3.1 Filtro de Part´ıculas . . . 43
3.3.3.2 Estado do seguimento . . . 48
3.3.3.3 Classificac¸ ˜ao dos Tipos de Objectos . . . 51
3.4 Calibrac¸ ˜ao do Sistema . . . 52
3.5 Integrac¸ ˜ao dos Algoritmos e Gerac¸ ˜ao de Alarmes . . . 54
3.5.1 Integrac¸ ˜ao dos Algoritmos . . . 54
3.5.2 Gerac¸ ˜ao de Alarmes . . . 56
4 Resultados Experimentais 59 4.1 Instalac¸ ˜ao Experimental . . . 59
4.2 Resultados da Detecc¸ ˜ao de Fogo . . . 60
4.3 Resultados da Detecc¸ ˜ao e Seguimento de Objectos . . . 62
5 Conclus ˜oes e Trabalhos Futuros 65 5.1 Conclus ˜oes . . . 65
5.2 Trabalhos Futuros . . . 66
5.3 Disseminac¸ ˜ao . . . 66
Lista de Figuras
2.1 Estrutura t´ıpica dos algoritmos de detecc¸ ˜ao de fogo baseados em sequ ˆencias de
ima-gens. . . 5
2.2 Vis ˜ao global dos espac¸os de coresHSI,CIE L*a*beYCbCr. . . 6
2.3 Elementos distractivos na detecc¸ ˜ao de fogo com base na apar ˆencia do fogo . . . 6
2.4 M ´etodos de an ´alise das caracter´ısticas din ˆamicas conhecidas do fogo no dom´ınio da frequ ˆencia . . . 8
2.5 Estrutura t´ıpica de um algoritmo de detecc¸ ˜ao e seguimento de objectos . . . 8
2.6 Vis ˜ao global dos m ´etodos de detecc¸ ˜ao de regi ˜oes de movimento . . . 10
2.7 Exemplos de aplicac¸ ˜ao da t ´ecnica de fluxo ´optico . . . 10
2.8 Exemplo do sistema em funcionamento, no qual s ˜ao detectadas as regi ˜oes do corpo humano . . . 11
3.1 Diagrama do sistema proposto . . . 16
3.2 Detecc¸ ˜ao de regi ˜oes de movimento atrav ´es do m ´etodo para estimac¸ ˜ao do plano de fundo . . . 17
3.3 Variac¸ ˜ao do limiar de diferenciac¸ ˜ao do m ´etodo para estimac¸ ˜ao do plano de fundo . . 18
3.4 Classificac¸ ˜ao dos p´ıxeis com base na cor atrav ´es do espac¸o de coresRGB . . . 20
3.5 Classificac¸ ˜ao dos p´ıxeis com base na cor atrav ´es do espac¸o de coresYCbCr . . . 21
3.6 Classificac¸ ˜ao dos p´ıxeis com base na cor atrav ´es do espac¸o de coresHSI . . . 22
3.7 Segmentac¸ ˜ao manual das regi ˜oes de chamas . . . 23
3.8 Resultados obtidos para a detecc¸ ˜ao de fogo com base em 5 modelos de cor . . . 24
3.9 Resultados obtidos para a detecc¸ ˜ao de fogo com base em 5 modelos de cor com elementos distractivos no ambiente . . . 25
3.10 Detecc¸ ˜ao de texturas din ˆamicas . . . 26
3.11 Processo de remoc¸ ˜ao de contornos . . . 27
3.13 Intersecc¸ ˜ao entre as caixas delimitadoras de duas regi ˜oes detectados . . . 28
3.14 Estrutura b ´asica de um banco de filtros com dois n´ıveis de transformac¸ ˜ao . . . 31
3.15 Sinais nos dom´ınios do tempo e frequ ˆencia para an ´alise da transformada wavelet discreta no espac¸o da frequ ˆencia temporal . . . 31
3.16 Resultado da transformadawaveletdiscreta no espac¸o da frequ ˆencia temporal . . . . 32
3.17 Sub-imagens de decomposic¸ ˜ao resultantes daDWTbidimensional com tr ˆes n´ıveis de transformac¸ ˜ao . . . 34
3.18 Resultado da an ´alise da transformadawaveletdiscreta no espac¸o da frequ ˆencia espacial 35 3.19 Forma de onda de um pixel ao longo do tempo . . . 37
3.20 Vis ˜ao global do modelo do plano de fundo . . . 38
3.21 Detecc¸ ˜ao de regi ˜oes de movimento atrav ´es da subtracc¸ ˜ao do plano de fundo . . . 39
3.22 Aprendizagem do modelo do plano de fundo . . . 39
3.23 Vis ˜ao global da detecc¸ ˜ao de objectos . . . 41
3.24 Vis ˜ao global do m ´etodo de remoc¸ ˜ao de sombras . . . 42
3.25 Resultado do m ´etodo de remoc¸ ˜ao de sombras . . . 43
3.26 Etapas de execuc¸ ˜ao de um filtro de part´ıculas . . . 44
3.27 Representac¸ ˜ao das 4 dimens ˜oes das part´ıculas . . . 46
3.28 M ´ascaras de movimento utilizadas para criac¸ ˜ao e actualizac¸ ˜ao dos filtros de part´ıculas 47 3.29 Localizac¸ ˜ao dos objectos a serem seguidos pelo sistema . . . 47
3.30 Resultado do algoritmo de detecc¸ ˜ao e seguimento de objectos . . . 48
3.31 Intersecc¸ ˜ao de objectos em movimento a serem seguidos pelo sistema . . . 49
3.32 Oclus ˜ao entre um objecto em movimento e um objecto fixo no ambiente . . . 50
3.33 Objectos em movimento a abandonar o campo de vis ˜ao da c ˆamara . . . 51
3.34 Classificac¸ ˜ao do tipo de objecto a ser seguido pelo sistema . . . 51
3.35 Calibrac¸ ˜ao do sistema . . . 53
3.36 Definic¸ ˜ao dos pol´ıgonos de calibrac¸ ˜ao do sistema . . . 54
3.37 Resultado da integrac¸ ˜ao dos resultados dos algoritmos de detecc¸ ˜ao de fogo, detecc¸ ˜ao e seguimento de objectos . . . 55
3.38 Caminho percorrido por objectos seguidos pelo sistema . . . 57
4.1 Exemplos de imagens do bancos de dados com a sa´ıda do algoritmo de detecc¸ ˜ao de fogo sobreposta . . . 60
4.3 Exemplos de imagens do bancos de dados com a sa´ıda do algoritmo de detecc¸ ˜ao e seguimento de objectos sobreposta . . . 62
4.4 Exemplos de categorizac¸ ˜ao para obtenc¸ ˜ao dos resultados experimentais do algoritmo de detecc¸ ˜ao e seguimento de objectos . . . 63
Lista de Tabelas
3.1 Resultados experimentais da detecc¸ ˜ao de fogo atrav ´es do m ´etodo de classificac¸ ˜ao dos p´ıxeis com base na cor (MCC) . . . 23
3.2 Correspond ˆencia entre as coordenadasGPSe as coordenadas do objecto no plano da imagem . . . 53
4.1 Resultados experimentais da detecc¸ ˜ao de fogo . . . 61
Lista de Notac¸ ˜oes
ω Valor m ´aximo para a comparac¸ ˜ao de histogramas de cores
α Constante de definic¸ ˜ao da velocidade de actualizac¸ ˜ao das novas observac¸ ˜oes
β Par ˆametro de an ´alise do sinal de sa´ıda da transformadawaveletdiscreta no espac¸o da frequ ˆencia espacial
χi Part´ıcula i
γ Valor m ´edio do par ˆametroβ
κ Intensidade m ´edia dos p´ıxeis numa regi ˜ao
λ Dist ˆancia entre as arestas das caixas delimitadoras de duas regi ˜oes detectadas
λ1 Constante de sintonizac¸ ˜ao do filtro temporal recursivo
λ2 Constante de sintonizac¸ ˜ao do filtro temporal recursivo
Bn Modelo do plano de fundo na imagemn
Fsp Imagem que representa a an ´alise do sinal de sa´ıda do banco de filtros da transformada
waveletdiscreta no espac¸o de frequ ˆencia temporal
Hcalib Imagem de calibrac¸ ˜ao da altura esperada dos objectos
Is Imagem actual
Isn Imagem do sistema na imagemn
IBS M ´ascara resultante do m ´etodo de subtracc¸ ˜ao do plano de fundo
If M ´ascara com as caixas delimitadoras das regi ˜oes de fogo detectadas
IHBE M ´ascara resultante do m ´etodo para estimac¸ ˜ao do plano de fundo
IPC M ´ascara resultante do m ´etodo de classificac¸ ˜ao dos p´ıxeis com base na cor
IPF M ´ascara com as caixas delimitadoras dos objectos a serem seguidos
IRC M ´ascara resultante do processo de remoc¸ ˜ao de contornos
ISR M ´ascara resultante do m ´etodo de remoc¸ ˜ao de sombras
ITD M ´ascara resultante do m ´etodo de detecc¸ ˜ao de texturas din ˆamicas
Tn Limiar de diferenciac¸ ˜ao na imagemn
xhh Sub-imagem alto-alto resultante da transformadawaveletdiscreta no espac¸o da frequ ˆencia espacial
xhl Sub-imagem alto-baixo resultante da transformada wavelet discreta no espac¸o da frequ ˆencia espacial
xlh Sub-imagem baixo-alto resultante da transformada wavelet discreta no espac¸o da frequ ˆencia espacial
ν Constante de sensibilidade do m ´etodo de remoc¸ ˜ao de sombras
ρ N ´umero de p´ıxeis em movimento na regi ˜ao do objecto
σ Valor m ´aximo dos picos do sinal de sa´ıda do banco de filtros da transformadawavelet
discreta no espac¸o de frequ ˆencia temporal
τ Constante de sensibilidade da func¸ ˜ao densidade de probabilidade
τH Constante de sensibilidade do m ´etodo de remoc¸ ˜ao de sombras
τS Constante de sensibilidade do m ´etodo de remoc¸ ˜ao de sombras
θ Par ˆametro de convers ˜ao entre espac¸os de cores
υ Constante de sensibilidade do m ´etodo de remoc¸ ˜ao de sombras
ε Constante de sensibilidade do m ´etodo de remoc¸ ˜ao de sombras
ϕ Constante de sensibilidade de actualizac¸ ˜ao de histogramas de cores
ϑ N ´umero de p´ıxeis em movimento na regi ˜ao de cada part´ıcula
ξ1 Valor m´ınimo do par ˆametroβ
ξ2 Valor m ´aximo do par ˆametroβ
ζ Constante de calibrac¸ ˜ao da altura do objecto
An Escalas de aproximac¸ ˜ao do sinal de sa´ıda do banco de filtros
B Componente azul
b Componente azul normalizado
Cf Conjunto de p´ıxeis considerados fogo
Cb Componente cromin ˆancia azul
Cbmean Valor m ´edio da componente cromin ˆancia azul
Cr Componente cromin ˆancia vermelho
Crmean Valor m ´edio da componente cromin ˆancia vermelho
Dn Escalas de detalhe do sinal de sa´ıda do banco de filtros
DW T Transformadawaveletdiscreta
dwtout Sinal de sa´ıda do banco de filtros
G Componente verde
g Componente verde normalizado
gf Func¸ ˜ao de resposta ao impulso de um filtro passa-baixo
GP S Sistema de posicionamento global
H Componente matiz
h1 Valor m´ınimo da componente matiz
h2 Valor m ´aximo da componente matiz
Hb Banda de alta frequ ˆencia resultante da transformada waveletdiscreta no espac¸o da
frequ ˆencia espacial
hf Func¸ ˜ao de resposta ao impulso de um filtro passa-alto
hi Altura da caixa delimitadora do objecto i
h[n]r Histograma de refer ˆencia do objecto n
h[n]mp Histograma de apar ˆencia da m ´edia das melhores part´ıculas do objecto n
hobj Altura do objecto
HBE M ´etodo de estimac¸ ˜ao do plano de fundo
HOG Histograma de gradientes orientados
hpi Histograma de cor da part´ıcula i
HSI Espac¸o de cores
HSV Espac¸o de cores
HY Modelo de cor
HY R Modelo de cor
I Componente Intensidade
i1 Valor m´ınimo da componente luminosidade
i2 Valor m ´aximo da componente luminosidade
intpf Dist ˆancia m ´axima entre as arestas das caixas delimitadoras de dois objectos para se
considerar que estes se interseccionam
Lb Banda de baixa frequ ˆencia
M Conjunto de p´ıxeis em movimento
M CC M ´etrica de classificac¸ ˜ao de imagens bin ´arias
Ndwt N ´umero total de p´ıxeis classificados como fogo
NinitBS Sequ ˆencia de imagens para aprendizagem do modelo do plano de fundo
Npicos N ´umero total de picos do sinal de sa´ıda do banco de filtros da transformadawavelet
discreta no espac¸o de frequ ˆencia temporal
N Cdwt N ´umero de imagens recolhidas para an ´alise da transformadawaveletdiscreta
R Componente vermelho
r Componente vermelho normalizado
r1 Ru´ıdo das part´ıculas relacionado com largura do objecto
r2 Ru´ıdo das part´ıculas relacionado com altura do objecto
ro Ru´ıdo das part´ıculas relacionado com a posic¸ ˜ao no plano da imagem do objecto
RT Valor global da componente vermelho
Rpf Ru´ıdo das part´ıculas para cada iterac¸ ˜ao do filtro de part´ıculas
RGB Espac¸o de cores
S Componente saturac¸ ˜ao
s1 Valor m´ınimo da componente saturac¸ ˜ao
s2 Valor m ´aximo da componente saturac¸ ˜ao
ST F T Transformada deFourierde curto espac¸o de tempo
thrBS N ´umero de p´ıxeis em movimento numa regi ˜ao da m ´ascara de subtracc¸ ˜ao do plano de
fundo
thrint Limite inferior do r ´acio de p´ıxeis classificados como fogo pela regra baseada na
inten-sidade dos p´ıxeis
thrmf Dist ˆancia Euclidiana m´ınima para se considerar que um objecto n ˜ao se encontra
est ´atico no ambiente
thrzc Limite inferior do n ´umero acumulado de passagens por zero do sinal de sa´ıda do
banco de filtros
updateBS Sequ ˆencia de imagens para actualizac¸ ˜ao do m ´etodo de subtracc¸ ˜ao do plano de fundo
V Componente valor
wi Largura da caixa delimitadora do objecto i
w[n]i Peso da part´ıcula i para o objecto n
W T Transformadawavelet
xf Sinal original no dom´ınio do tempo
xi Posic¸ ˜ao x da caixa delimitadora do objecto i
xobj Posic¸ ˜ao do objecto em relac¸ ˜ao `a coordenadaxda imagem
XM L Formato para criac¸ ˜ao de documentos
Y Componente luminosidade
Y1 Limite superior da curva de correlac¸ ˜ao entre componente azul e saturac¸ ˜ao
Y2 Limite inferior da curva de correlac¸ ˜ao entre componente azul e saturac¸ ˜ao
yi Posic¸ ˜ao y da caixa delimitadora do objecto i
Yr Incerteza atribu´ıda ao movimento do objecto em relac¸ ˜ao `a coordenadayda imagem
Yalto Sa´ıda do filtro passa alto
Ybaixo Sa´ıda do filtro passa baixo
Ymean Valor m ´edio da componente luminosidade
yobj Posic¸ ˜ao do objecto em relac¸ ˜ao `a coordenadayda imagem
yobs Probabilidade de observac¸ ˜ao
Cap´ıtulo 1
Introduc¸ ˜ao
1.1
Motivac¸ ˜ao e Vis ˜ao Geral
A seguranc¸a das pessoas e dos seus bens ´e um tema de grande preocupac¸ ˜ao para a sociedade. Com recurso a sistemas de v´ıdeo vigil ˆancia ´e poss´ıvel obter ´ındices de seguranc¸a e supervis ˜ao mais elevados, visto que estes permitem o controlo e monitorizac¸ ˜ao de uma determinada ´area de forma permanente e exaustiva. Estes sistemas s ˜ao tipicamente monitorizados por um conjunto de pessoas com recurso a monitores que exibem as imagens das c ˆamaras em tempo real. Consoante o cen ´ario em causa, ´e de extrema dificuldade para os operadores destes sistemas conseguirem detectar todos os eventos que ocorrem em tempo real.
Recorrendo a algoritmos de vis ˜ao computacional ´e poss´ıvel automatizar aplicac¸ ˜oes de v´ıdeo vigil ˆancia, processando em tempo real os dados provenientes dos referidos sistemas, de forma a detectar situac¸ ˜oes an ´omalas e seguir objectos em movimento. Assim ´e poss´ıvel gerar automatica-mente diversos tipos de alarmes de modo a assistir os operadores do sistema.
A referida automatizac¸ ˜ao permite, entre outros, detectar m ´ultiplos focos de inc ˆendio. Novas t ´ecnicas e estudos realizados recentemente demonstram que a detecc¸ ˜ao de fogo atrav ´es de uma sequ ˆencia de imagens pode ser uma alternativa fi ´avel ou um complemento `as t ´ecnicas existentes, tais como os dispositivos autom ´aticos de detecc¸ ˜ao de calor, chama, fumo ou luz. No entanto, em ambientes n ˜ao estruturados n ˜ao ´e poss´ıvel recorrer aos referidos dispositivos visto que estes apre-sentam diversos problemas, como sejam uma elevada taxa de falsos alarmes e uma necessidade de proximidade `a chama.
Cap´ıtulo 1. Introduc¸ ˜ao
obst ´aculos), com a formac¸ ˜ao de grupos de objectos ou com o desaparecimento parcial dos mes-mos. Nestes casos, n ˜ao ´e poss´ıvel seguir isoladamente os objectos e o sistema dever ´a ser capaz de os reconhecer quando estas abandonarem o estado de oclus ˜ao.
O volume de trabalhos publicados na ´area da seguranc¸a e vigil ˆancia autom ´atica e a evoluc¸ ˜ao dos algoritmos de vis ˜ao computacional conduz a sistemas cada vez mais complexos e sofisticados. No entanto, ´e poss´ıvel projectar e implementar sistemas que incluam m ´etodos mais eficientes e robustos na detecc¸ ˜ao de focos de inc ˆendio e seguimento de m ´ultiplos objectos.
1.2
Objectivos
O objectivo desta dissertac¸ ˜ao ´e projectar e implementar um sistema para mitigar algumas das limitac¸ ˜oes dos algoritmos de detecc¸ ˜ao de fogo e seguimento de objectos presentes na literatura. Como tal, ´e proposto um sistema que tem a capacidade de detectar m ´ultiplos focos de inc ˆendio e, em simult ˆaneo, detectar e seguir objectos em tempo real, mesmo que estes entrem em oclus ˜ao com objectos em movimento ou com objectos presentes no ambiente no qual o sistema de v´ıdeo vigil ˆancia est ´a instalado. De referir que o sistema recorre a uma c ˆamara fixa no ambiente para obter uma sequ ˆencia de imagens.
Com a introduc¸ ˜ao do algoritmo de detecc¸ ˜ao de fogo no sistema proposto, pretende-se detectar m ´ultiplos focos de inc ˆendio de forma eficiente e robusta. Recorrendo a m ´etodos que analisam as caracter´ısticas din ˆamicas conhecidas do fogo no dom´ınio da frequ ˆencia, ´e poss´ıvel discriminar entre um fogo e um objecto em movimento com cores semelhantes `as das chamas.
Com base no algoritmo de detecc¸ ˜ao e seguimento de objectos ´e poss´ıvel seguir objectos em mo-vimento em ambientes exteriores e com variac¸ ˜ao das condic¸ ˜oes din ˆamicas do ambiente (e.g nuvens, luminosidade e sombras) no qual o sistema de v´ıdeo vigil ˆancia est ´a instalado, recorrendo a t ´ecnicas de extracc¸ ˜ao de regi ˜oes de movimento e a modelos estoc ´asticos para executar o seguimento dos mesmos.
1.3
Soluc¸ ˜ao Proposta
O sistema proposto nesta dissertac¸ ˜ao introduz um conjunto de inovac¸ ˜oes em relac¸ ˜ao aos algo-ritmos presentes na literatura, destacando-se:
1.4. Estrutura
detecc¸ ˜ao de texturas din ˆamicas. Caso este detecte uma constante presenc¸a de uma regi ˜ao de p´ıxeis considerados fogo, a an ´alise no dom´ınio da frequ ˆencia na referida regi ˜ao ´e aplicada. Foi tamb ´em proposto uma extens ˜ao ao m ´etodo de an ´alise das texturas din ˆamicas no dom´ınio da frequ ˆencia (T ¨oreyin et al., 2006), aplicando uma transformadawaveletdiscreta com tr ˆes n´ıveis de transformac¸ ˜ao, de modo a tornar a detecc¸ ˜ao de fogo mais robusta.
• Algoritmo de detecc¸ ˜ao e seguimento de objectos: para segmentar as regi ˜oes de movi-mento na imagem actual s ˜ao utilizados os m ´etodos de subtracc¸ ˜ao do plano de fundo (Kim et al., 2005) e de estimac¸ ˜ao do plano de fundo (Collins et al., 2000). O m ´etodo proposto por Kim et al. (2005) baseia-se na aprendizagem de um ´unico modelo do plano de fundo, tornando o sistema demasiado sens´ıvel a alterac¸ ˜oes de luminosidade. Nesta dissertac¸ ˜ao ´e proposto uma extens ˜ao a este m ´etodo, onde uma grelha regular ´e sobreposta `a imagem actual, asso-ciando a cada posic¸ ˜ao da grelha um modelo do plano de fundo. Assim, ´e poss´ıvel que cada modelo aprenda o plano de fundo independentemente do movimento existente noutra regi ˜ao da imagem.
Com determinadas condic¸ ˜oes de luminosidade, o resultado da detecc¸ ˜ao de movimento inclui as sombras dos objectos. Para que estas n ˜ao afectem o processo de seguimento, surge a necessidade de as remover. Este processo ´e efectuada atrav ´es de uma extens ˜ao ao m ´etodo proposto por Cucchiara et al. (2003), onde apenas s ˜ao removidas as sombras na regi ˜ao inferior dos objectos detectados.
O processo de seguimento de objectos recorre a filtros de part´ıculas que se baseiam nas caracter´ısticas de apar ˆencia dos objectos para estimar a posic¸ ˜ao dos mesmos. A forma de adicionar ru´ıdo aleat ´orio `as part´ıculas foi alterado, de modo a actualizar as 4 dimens ˜oes do ru´ıdo das part´ıculas com base nas ´ultimas localizac¸ ˜oes do objecto em movimento e assim, na iterac¸ ˜ao seguinte do filtro, direccionar as part´ıculas para a localizac¸ ˜ao esperada do objecto.
Apesar de o algoritmo de detecc¸ ˜ao de fogo incluir m ´etodos suficientemente robustos para diferen-ciar um fogo de um objecto em movimento com cores semelhantes `as das chamas, poder ˜ao existir situac¸ ˜oes nas quais objectos com movimentos repetitivos afectem a robustez do algoritmo. Neste sentido, o sistema proposto nesta dissertac¸ ˜ao inclui uma soluc¸ ˜ao inovadora ao integrar o resultado dos dois algoritmos, de forma a reduzir a taxa de falsos alarmes na detecc¸ ˜ao de fogo proveniente dos referidos objectos.
Para a validac¸ ˜ao do sistema proposto, os resultados experimentais foram obtidos a partir de um banco de dados de 15 v´ıdeos. Os resultados mostram que o sistema detecta regi ˜oes de chamas em 92.7% das imagens testadas, detecta e segue objectos em movimento em 95.87% e 92.77% das imagens testadas, respectivamente.
1.4
Estrutura
Esta dissertac¸ ˜ao est ´a organizada da seguinte forma:
Cap´ıtulo 1. Introduc¸ ˜ao
Cap´ıtulo 3 Descric¸ ˜ao do sistema proposto para detecc¸ ˜ao de fogo e detecc¸ ˜ao e seguimento de objectos em tempo real;
Cap´ıtulo 4 Apresentac¸ ˜ao da configurac¸ ˜ao experimental e os resultados obtidos a partir de um de banco de dados com 15 v´ıdeos;
Cap´ıtulo 2
Revis ˜ao da Literatura
O sistema proposto nesta dissertac¸ ˜ao ´e baseado na integrac¸ ˜ao dos algoritmos de detecc¸ ˜ao de fogo e detecc¸ ˜ao e seguimento de objectos em tempo real. Neste cap´ıtulo ´e revista a literatura relacionada com os referidos algoritmos, detalhada nas secc¸ ˜oes 2.1 e 2.2, respectivamente.
2.1
Detecc¸ ˜ao de Fogo
A an ´alise da literatura permite concluir que a detecc¸ ˜ao de fogo atrav ´es de algoritmos de vis ˜ao computacional engloba tr ˆes passos fundamentais (ver figura 2.1): (1) detecc¸ ˜ao de regi ˜oes de mo-vimento; (2) detecc¸ ˜ao de regi ˜oes baseado na apar ˆencia e (3) an ´alise das caracter´ısticas din ˆamicas conhecidas do fogo. Os dois primeiros passos permitem segmentar regi ˜oes com cores semelhantes `as chamas que apresentam movimento. O terceiro passo ´e necess ´ario para diminuir a taxa de falsos alarmes proveniente dos objectos em movimento com apar ˆencia semelhante ao fogo.
Figura 2.1:Estrutura t´ıpica dos algoritmos de detecc¸ ˜ao de fogo baseados em sequ ˆencias de imagens.
Uma aproximac¸ ˜ao `a detecc¸ ˜ao de fogo atrav ´es de algoritmos de vis ˜ao computacional consiste em classificar os p´ıxeis da imagem de acordo com um modelo de apar ˆencia baseado no fogo (Chen et al., 2010). Esta aproximac¸ ˜ao, que se baseia na classificac¸ ˜ao dos p´ıxeis com base na informac¸ ˜ao da cor, tem um papel fundamental nos algoritmos de detecc¸ ˜ao de fogo, pois os restantes m ´etodos implementados est ˜ao dependentes da capacidade desta t ´ecnica para segmentar regi ˜oes de p´ıxeis com cores semelhantes `as das chamas.
Cap´ıtulo 2. Revis ˜ao da Literatura
tabela treinada ´e utilizada para extrair as regi ˜oes com cores semelhantes `as das chamas. Chen et al. (2010) utiliza um algoritmo de filtragem dos p´ıxeis, aplicando um conjunto de regras no espac¸o de coresRGB. Por outro lado, T ¨oreyin et al. (2006) usa uma distribuic¸ ˜ao pr ´e-determinada de cores no espac¸o de coresRGBpara executar uma segmentac¸ ˜ao dos p´ıxeis com base na cor.
De modo a especificar as intensidades de cor e brilho separadamente, s ˜ao introduzidos outros espac¸os de cores no m ´etodo de classificac¸ ˜ao dos p´ıxeis com base na cor (ver figura 2.2). Os modelos propostos por Celik and Demirel (2009) e Celik (2010) utilizam os espac¸os de coresYCbCr
eCIE L*a*bpara construir um modelo gen ´erico de segmentac¸ ˜ao dos p´ıxeis atrav ´es de um conjunto de regras. Por sua vez, Horng et al. (2005) utiliza uma transformac¸ ˜ao para o espac¸o de coresHSI
e aplica o m ´etodo de separac¸ ˜ao de cores para segmentar regi ˜oes com apar ˆencia semelhante ao fogo, removendo posteriormente os p´ıxeis saturados e com pouca intensidade que n ˜ao contenham chamas, tais como fumo e regi ˜oes com reflex ˜oes.
(a) Imagem de entrada (b)HSI (c)CIE L*a*b (d)YCbCr
Figura 2.2: Vis ˜ao global dos espac¸os de coresHSI,CIE L*a*beYCbCr. (a) Imagem original no espac¸o de coresRGB; imagem convertida para o espac¸o de cores:HSI(Horng et al., 2005) (b),CIE L*a*b(Celik, 2010) (c) eYCbCr(Celik and Demirel, 2009) (d).
Embora os m ´etodos de classificac¸ ˜ao dos p´ıxeis com base na cor apresentem uma elevada ro-bustez, estes est ˜ao sujeitos a um conjunto elevado de distractivos, isto ´e, objectos est ´aticos ou em movimento que apresentam cores semelhantes `as das chamas (ver figura 2.3).
(a) (b) (c) (d)
Figura 2.3:Elementos distractivos na detecc¸ ˜ao de fogo com base na apar ˆencia do fogo: areias (a), ´arvores (b), relvado (c) e arm ´arios (d).
2.1. Detecc¸ ˜ao de Fogo
um n ´umero de p´ıxeis com apar ˆencia semelhante ao fogo acima de um determinado limiar. Neste sentido, est ˜ao sujeitos a uma elevada taxa de falsos alarmes, pois qualquer objecto que apresente cores semelhantes `as das chamas ´e classificado como fogo.
O fogo apresenta-se como um objecto est ´atico com forma e textura din ˆamicas. Neste sentido, ´e poss´ıvel reduzir a taxa de falsos alarmes na detecc¸ ˜ao de fogo, eliminando regi ˜oes de p´ıxeis que representam objectos est ´aticos presentes no ambiente. Os m ´etodos propostos por Phillips III et al. (2002), Celik (2010), Celik et al. (2007, 2006) e Ko et al. (2009) incorporam a t ´ecnica de diferenciac¸ ˜ao temporal de imagens consecutivas para detectar regi ˜oes de movimento. Assim, com base nesta t ´ecnica e na detecc¸ ˜ao de regi ˜oes de p´ıxeis atrav ´es da apar ˆencia do fogo, apenas as regi ˜oes de movimento s ˜ao classificados com base na informac¸ ˜ao de cor. Uma an ´alise detalhada `a detecc¸ ˜ao de regi ˜oes de movimento ´e apresentada na secc¸ ˜ao 2.2.1.
Uma das diversas caracter´ısticas do fogo ´e a oscilac¸ ˜ao dos p´ıxeis nas regi ˜oes circundantes `as chamas (Detriche and Lanore, 1980; Drysdale, 2011; Hammis et al., 1992). Para aumentar a fiabilidade da detecc¸ ˜ao de fogo e diminuir a taxa de falsos alarmes provenientes de objectos em movimento com cores semelhantes `as das chamas, podem ser aplicados m ´etodos de an ´alise das caracter´ısticas din ˆamicas conhecidas do fogo nos dom´ınios do tempo e frequ ˆencia.
Para classificar uma regi ˜ao como fogo, os algoritmos propostos por Chen et al. (2004, 2010) incluem m ´etodos de an ´alise das caracter´ısticas din ˆamicas conhecidas do fogo no dom´ınio do tempo, propondo a an ´alise da variac¸ ˜ao da forma das chamas e da variac¸ ˜ao de brilho dos p´ıxeis, com base no n ´umero de p´ıxeis considerados fogo pela t ´ecnica de classificac¸ ˜ao dos p´ıxeis com base na cor que apresentam movimento.
A an ´alise das caracter´ısticas din ˆamicas conhecidas do fogo no dom´ınio da frequ ˆencia acres-centam uma elevada robustez aos algoritmos de detecc¸ ˜ao de fogo, pois permitem analisar: (1) a oscilac¸ ˜ao dos p´ıxeis na zona circundante `as chamas (T ¨oreyin et al., 2006; Toreyin et al., 2005; Chen et al., 2010, 2004), (2) a variac¸ ˜ao da textura das chamas (T ¨oreyin et al., 2006; Toreyin et al., 2005) e (3) a variac¸ ˜ao da forma das chamas (Liu and Ahuja, 2004). ´E importante referir que os algoritmos de detecc¸ ˜ao de fogo que incluem m ´etodos de an ´alise no dom´ınio da frequ ˆencia apresentam uma taxa de falsos alarmes inferior na detecc¸ ˜ao de fogo em relac¸ ˜ao aos restantes algoritmos.
O algoritmo proposto por T ¨oreyin et al. (2006) analisa as referidas caracter´ısticas do fogo atrav ´es da transformadawaveletdiscreta (DWT) no espac¸o da frequ ˆencia temporal e espacial, de modo a avaliar o comportamento oscilat ´orio dos p´ıxeis nas zonas circundantes `as chamas e a variac¸ ˜ao de textura das chamas nas regi ˜oes classificadas como fogo, respectivamente. Apesar de apresentar bons resultados para o conjunto de dados testado, os m ´etodos implementados s ˜ao pesados com-putacionalmente e o modelo de cores utilizado n ˜ao segmenta convenientemente as chamas.
No m ´etodo proposto por Liu and Ahuja (2004), os contornos das chamas s ˜ao representados atrav ´es dos coeficientes deFourier. Para a discriminac¸ ˜ao entre uma regi ˜ao de fogo e um objecto em movimento com cores semelhantes `as das chamas ´e analisada a variac¸ ˜ao destes coeficientes ao longo do tempo. No entanto, este m ´etodo ´e limitado a chamas de grande dimens ˜ao.
Cap´ıtulo 2. Revis ˜ao da Literatura
(a) (b)
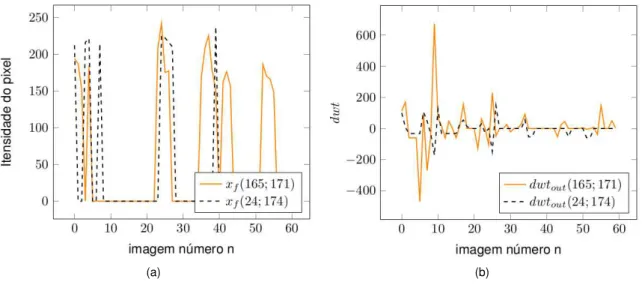
Figura 2.4: M ´etodos de an ´alise das caracter´ısticas din ˆamicas conhecidas do fogo no dom´ınio da frequ ˆencia: frequ ˆencia de oscilac¸ ˜ao de um pixel na regi ˜ao circundante `as chamas (T ¨oreyin et al., 2006) (a); contorno das chamas (Liu and Ahuja, 2004) (b).
2.2
Detecc¸ ˜ao e Seguimento de Objectos
Enquanto o objecto a ser seguido pelo sistema se encontra na perspectiva da c ˆamara, este pode estar ocluso (parcialmente ou totalmente) por outros objectos ou obst ´aculos. Neste sentido, um al-goritmo de detecc¸ ˜ao e seguimento de objectos deve ter a capacidade de seguir objectos e conseguir distingui-los ap ´os uma ou mais oclus ˜oes, mesmo com alterac¸ ˜oes da luminosidade e movimentos de outros objectos.
A an ´alise da literatura permite concluir que o seguimento de objectos atrav ´es de algoritmos de vis ˜ao computacional inclui tr ˆes passos fundamentais: segmentac¸ ˜ao, detecc¸ ˜ao e seguimento de objectos (ver figura 2.5). Os processos de segmentac¸ ˜ao e detecc¸ ˜ao s ˜ao utilizados para ex-trair regi ˜oes de movimento e detectar objectos, atrav ´es de t ´ecnicas de subtracc¸ ˜ao do plano de fundo ou diferenciac¸ ˜ao temporal. Para o processo de seguimento de objectos s ˜ao utilizadas fil-tros estoc ´asticos que garantem o seguimento de um determinado objecto, mesmo em situac¸ ˜oes de oclus ˜oes entre objectos ou obst ´aculos.
Figura 2.5:Estrutura t´ıpica de um algoritmo de detecc¸ ˜ao e seguimento de objectos.
De seguida, s ˜ao analisadas um conjunto de t ´ecnicas de detecc¸ ˜ao regi ˜oes de movimento e t ´ecnicas de seguimento de objectos, descritas nas secc¸ ˜oes 2.2.1 e 2.2.2, respectivamente.
2.2.1
Detecc¸ ˜ao de Regi ˜oes de Movimento
2.2. Detecc¸ ˜ao e Seguimento de Objectos
Existem tr ˆes aproximac¸ ˜oes principais para a detecc¸ ˜ao de objectos em movimento (Moeslund et al., 2006): (1) t ´ecnica de diferenciac¸ ˜ao temporal; (2) t ´ecnica de subtracc¸ ˜ao do plano de fundo e (3) t ´ecnica de fluxo ´optico.
A t ´ecnica de diferenciac¸ ˜ao temporal consiste na subtracc¸ ˜ao directa de imagens consecutivas. Esta t ´ecnica ´e ideal para ambientes com grandes variac¸ ˜oes din ˆamicas, apesar n ˜ao extrair conveni-entemente as regi ˜oes de movimento e n ˜ao detectar movimento quando os objectos se encontram a uma determinada dist ˆancia da c ˆamara. O m ´etodo proposto por Lipton et al. (1998) detecta regi ˜oes de movimento atrav ´es desta t ´ecnica e utiliza a an ´alise de contornos para extrair as regi ˜oes de movi-mento. Por outro lado, Collins et al. (2000) prop ˜oe um m ´etodo de detecc¸ ˜ao de regi ˜oes de movimento atrav ´es de duas operac¸ ˜oes, diferenciac¸ ˜ao de tr ˆes imagens consecutivas e subtracc¸ ˜ao do plano de fundo.
Para compensar os efeitos da alterac¸ ˜ao da luminosidade e dos movimentos repetitivos dos ob-jectos num ambiente exterior, a t ´ecnica de subtracc¸ ˜ao do plano de fundo ajusta um modelo de s ´eries temporais para cada pixel ou grupo de p´ıxeis, sendo capaz de lidar com flutuac¸ ˜oes tempo-rais, embora seja computacionalmente complexo (Toyama et al., 1999). Esta t ´ecnica baseia-se na representac¸ ˜ao do plano de fundo atrav ´es de um modelo, onde as regi ˜oes de p´ıxeis em movimento s ˜ao determinadas atrav ´es da comparac¸ ˜ao entre este e a imagem actual.
Entende-se como plano de fundo as regi ˜oes do ambiente que est ˜ao fixas, tais como estradas e edif´ıcios. Por seu lado, qualquer elemento que se mova no ambiente da c ˆamara ou um elemento que esteja estacion ´ario durante um curto per´ıodo de tempo (e.g autom ´oveis estacionados) s ˜ao conside-rados elementos do primeiro plano. ´E poss´ıvel que diversos elementos do plano de fundo possam apresentar movimento, tais como ´arvores ou ervas.
Os m ´etodos propostos por Stauffer and Grimson (1999), Grimson et al. (1998), KaewTraKulPong and Bowden (2001), Friedman and Russell (1997) e Butler et al. (2003) utilizam uma mistura de distribuic¸ ˜oes gaussianas para construir um modelo do plano de fundo com base numa sequ ˆencia de imagens. Para cada pixel da nova imagem, o seu valor ´e comparado com o modelo e, caso esteja dentro de um intervalo dado pelo desvio padr ˜ao, os par ˆametros da gaussiana s ˜ao ajustados. Caso contr ´ario, a distribuic¸ ˜ao gaussiana que modela o pixel ´e substitu´ıda.
Javed et al. (2002) prop ˜oe a utilizac¸ ˜ao da informac¸ ˜ao do gradiente no modelo do plano de fundo para reduzir o erro de classificac¸ ˜ao da informac¸ ˜ao de cor e para lidar com as mudanc¸as de lu-minosidade. Com a alterac¸ ˜ao das condic¸ ˜oes de luminosidade, a informac¸ ˜ao de cor de cada pixel ´e alterada subitamente e segundo Javed et al. (2002), o gradiente do plano de fundo mant ´em-se est ´avel durante a ocorr ˆencia dessas alterac¸ ˜oes.
Cap´ıtulo 2. Revis ˜ao da Literatura
De referir que a escolha do espac¸o de cores ´e determinante para os m ´etodos de subtracc¸ ˜ao do plano de fundo. O espac¸o de coresRGBpermite medir a distorc¸ ˜ao do brilho e da cor. No entanto, para m ´etodos que t ˆem a capacidade de lidar com flutuac¸ ˜oes din ˆamicas do ambiente, os espac¸os de cores YCbCreHSVs ˜ao mais adequados, pois permitem separar a cor e a intensidade de um determinado pixel. Para al ´em do espac¸o de coresRGB, foram utilizadas outras representac¸ ˜oes para extrair o plano de fundo. Concretamente, Wren et al. (1997) prop ˆos a utilizac¸ ˜ao do espac¸o de cores
YUVe Cucchiara et al. (2003) o espac¸o de coresHSV.
A figura 2.6 apresenta dois exemplos das t ´ecnicas de diferenciac¸ ˜ao temporal e subtracc¸ ˜ao do plano de fundo, aplicadas a imagens provenientes de sistemas de v´ıdeo vigil ˆancia instalados em ambientes exteriores.
(a) (b) (c)
Figura 2.6: Vis ˜ao global dos m ´etodos de detecc¸ ˜ao de regi ˜oes de movimento. (a) imagem original; m ´ascaras resultante da t ´ecnica de subtracc¸ ˜ao do plano de fundo (b) e diferenciac¸ ˜ao temporal (c).
Outra das formas de detectar objectos em movimento ´e utilizar a t ´ecnica de fluxo ´optico. Esta t ´ecnica ´e definida como o deslocamento aparente dos padr ˜oes de brilho da imagem, obtendo-se para cada pixel da imagem um vector que representa a direcc¸ ˜ao e a intensidade do movimento (Horng and Schunck, 1981; Barron et al., 1992; Roberts et al., 2009). O fluxo ´optico apresenta uma excelente segmentac¸ ˜ao das regi ˜oes em movimento, embora seja computacionalmente pe-sado, tornando-se assim inadequada para o sistema proposto. A figura 2.7 exp ˜oe dois exemplos de aplicac¸ ˜ao da t ´ecnica de fluxo ´optico.
(a) (b)
2.2. Detecc¸ ˜ao e Seguimento de Objectos
2.2.2
Seguimento de Objectos
O processo de seguimento de objectos pode ser dividido em duas aproximac¸ ˜oes: (1) a cada nova imagem, detectar todos os objectos presentes no ambiente e comparar com a lista de objectos da imagem anterior; (2) detectar e seguir objectos atrav ´es da extracc¸ ˜ao de uma ou v ´arias caracter´ısticas que os descrevem unicamente, e recorrer a t ´ecnicas para executar o seguimento dos mesmos com base nas referidas caracter´ısticas: algoritmo mean shift e CAMShift, filtro de Kalman e filtro de part´ıculas.
Assim, ao utilizar a segunda aproximac¸ ˜ao para o seguimento de objectos, ´e necess ´ario extrair pelo menos uma das caracter´ısticas dos objectos:
• Caracter´ısticas geom ´etricas - posic¸ ˜ao e tamanho do objecto no plano da c ˆamara, atrav ´es da caixa delimitadora (bounding box) do objecto (Matsumura et al., 2002).
• Caracter´ısticas de contorno - a forma do objecto ´e extra´ıda atrav ´es da segmentac¸ ˜ao das regi ˜oes de movimento (Hariatoglu et al., 1998; Haritaoglu et al., 2000).
• Caracter´ısticas de cor e textura - recorrendo a modelos de apar ˆencia (Chien et al., 2006; Kang et al., 2003; Hariatoglu et al., 1998; Lu and Tan, 2001) o processo de seguimento de objectos torna-se substancialmente mais robusto e complexo computacionalmente.
Para o processo de seguimento ´e necess ´ario adequar as caracter´ısticas dos objectos ao ambi-ente, isto ´e, ter em considerac¸ ˜ao os par ˆametros de aquisic¸ ˜ao da c ˆamara (imagens a cor ou na escala de cinzentos, resoluc¸ ˜ao da imagem e o campo visual da c ˆamara), bem como o tipo de ambiente no qual o sistema de v´ıdeo vigil ˆancia est ´a instalado (ambientes interiores ou exteriores, dia ou noite).
A grande maioria dos trabalhos publicados t ˆem por base a t ´ecnica de subtracc¸ ˜ao do plano de fundo para extrair regi ˜oes de movimento, e a partir destas executar o seguimento de objectos. Ber-claz et al. (2006) executa o seguimento de objectos atrav ´es do processamento das traject ´orias in-dividuais de cada objecto ao longo do tempo. Por outro lado, Hariatoglu et al. (1998) e Wren et al. (1997) utilizam uma an ´alise da forma (cabec¸a, tronco, m ˜aos e p ´es) dos objectos para o seguimento dos mesmos, criando modelos de apar ˆencia para distinguir objectos em situac¸ ˜oes de oclus ˜ao. A figura 2.8 mostra um exemplo do sistema proposto por (Hariatoglu et al., 1998), no qual s ˜ao detec-tadas as regi ˜oes do corpo humano.
(a) (b)
Cap´ıtulo 2. Revis ˜ao da Literatura
Haritaoglu et al. (1999) prop ˆos um sistema de detecc¸ ˜ao de objectos atrav ´es da extracc¸ ˜ao de regi ˜oes de movimento, executando posteriormente o seguimento dos objectos atrav ´es do histo-grama de apar ˆencia. Simultaneamente, combina esta informac¸ ˜ao com a localizac¸ ˜ao da cabec¸a das pessoas dentro de uma determinada regi ˜ao.
O m ´etodo proposto por Zhao and Nevatia (2004) utiliza um modelo da forma da cabec¸a humana para segmentar regi ˜oes de movimento e seguir as pessoas. O algoritmo apresenta a particularidade da c ˆamara poder estar instalada a poucos metros de altura e apontada para baixo. Kang et al. (2003) tamb ´em aplica a detecc¸ ˜ao da cabec¸a ap ´os a detecc¸ ˜ao de movimento com base na t ´ecnica de subtracc¸ ˜ao do plano de fundo, seguindo a pessoa atrav ´es da comparac¸ ˜ao da apar ˆencia da cabec¸a. Por outro lado, os m ´etodos propostos por Wang et al. (2002) e Matsumura et al. (2002) aplicam a detecc¸ ˜ao de regi ˜oes de movimento para extrair regi ˜oes de pele na imagem actual, construindo um modelo da cor da pele para seguir objectos.
Os sistemas de v´ıdeo vigil ˆancia instalados em ambientes exteriores est ˜ao sujeitos a grandes variac¸ ˜oes do ambiente. Neste sentido, as t ´ecnicas de segmentac¸ ˜ao de regi ˜oes de movimento po-der ˜ao apresentar uma pobre segmentac¸ ˜ao dos objectos em movimento, fazendo com que os siste-mas que dependem das caracter´ısticas da cabec¸a e pele de um humano para executar o seguimento dos mesmos possam ser pouco robustos. A forma de solucionar este problema ´e recorrer a carac-ter´ısticas que apresentem uma maior informac¸ ˜ao acerca dos objectos (cor e a textura), conjugadas com t ´ecnicas que adicionam ao sistema a capacidade de previs ˜ao. Existem duas abordagens prin-cipais para prever a posic¸ ˜ao de um determinado objecto na pr ´oxima imagem: (1) filtro deKalmane (2) filtro de part´ıculas.
O conceito base de um filtro dekalman(Thacker and Lacey, 2006; Kalman, 1960; Black et al., 2005) consiste na estimac¸ ˜ao recursiva de par ˆametros atrav ´es de um conjunto de premissas e na presenc¸a de ru´ıdo. Neste sentido, ´e poss´ıvel maximizar a probabilidade `a posteriori mantendo pouca informac¸ ˜ao transacta, actualizando iterativamente o modelo. Apesar de ser uma t ´ecnica robusta, o filtro dekalman ´e incapaz de lidar com distribuic¸ ˜oes n ˜ao-gaussianas, tornando-se inadequado para sistemas de v´ıdeo vigil ˆancia.
Para lidar com movimentos n ˜ao lineares ´e necess ´ario recorrer a outros filtros estoc ´asticos mais avanc¸ados, tais como o filtro de part´ıculas. Este tem a capacidade de estimar um conjunto de par ˆametros (Arulampalam et al., 2002), permitindo assim seguir objectos previamente detectados. Este filtro consiste em utilizar um conjunto de amostras (denominadas part´ıculas) ponderadas para aproximar uma determinada func¸ ˜ao densidade de probabilidade, estimando assim a posic¸ ˜ao do objecto a ser seguido. Uma descric¸ ˜ao do filtro de part´ıculas ´e apresentada na secc¸ ˜ao 3.3.3.1.
2.2. Detecc¸ ˜ao e Seguimento de Objectos
2.2.2.1 Oclus ˜oes Entre Objectos
As oclus ˜oes entre objectos no mundo real s ˜ao frequentes e est ˜ao associadas a dois tipos: (1) entre um objecto em movimento e objectos fixos no ambiente (e.g ´arvore e arm ´ario); (2) entre m ´ultiplos objectos que se encontram a ser seguidos.
Uma das formas de lidar com oclus ˜oes entre objectos ´e utilizar a capacidade de previs ˜ao dos filtros de part´ıculas com base na apar ˆencia dos objectos. Outra das formas ´e recorrer a m ´ultiplas c ˆamaras com campos de vis ˜ao sobrepostos. Os m ´etodos propostos por Khan et al. (2001) e Khan and Shah (2003), exploram a relac¸ ˜ao espacial conhecida entre os diversos campos de vis ˜ao das c ˆamaras para facilitar a correspond ˆencia entre os objectos. De forma semelhante, Kim and Davis (2006) e Khan and Shah (2006) executam uma associac¸ ˜ao de dados entre pontos de vista e explo-ram combinac¸ ˜oes e restric¸ ˜oes de homografia, atrav ´es da extracc¸ ˜ao dos eixos principais (verticais) de um ser humano e das caracter´ısticas associadas com a silhueta, respectivamente.
Existem outras formas de lidar com oclus ˜oes. O m ´etodo proposto por Lu and Tan (2001) antecipa a oclus ˜ao entre objectos em movimento, verificando a cada instante se a m´ınima caixa delimitadora ocupada pelos objectos poder ´a entrar em intersecc¸ ˜ao. Por outro lado, Koller et al. (1994) estima a posic¸ ˜ao de profundidade dos objectos em seguimento, classificando-os com base na sua posic¸ ˜ao vertical e combina essa informac¸ ˜ao com as posic¸ ˜oes esperadas, determinadas por um filtro de
Kalman.
2.2.2.2 M ´ultiplas C ˆamaras
Um dos temas em ascens ˜ao na ´area de detecc¸ ˜ao e seguimento de objectos ´e a utilizac¸ ˜ao de m ´ultiplas c ˆamaras com vistas disjuntas. O m ´etodo proposto por Javed et al. (2003) estabelece uma correspond ˆencia entre objectos quando estes se movimentam entre c ˆamaras nesta configurac¸ ˜ao, atrav ´es de uma aprendizagem da topologia das c ˆamaras e dos caminhos percorridos pelos objectos.
Os m ´etodos propostos por Zhu et al. (2011) e Kettnaker and Zabih (1999) associam as tra-ject ´orias dos obtra-jectos em movimento sobre as m ´ultiplas c ˆamaras sem sobreposic¸ ˜ao do campo de vis ˜ao para encontrar correspond ˆencia entre estes. Chen et al. (2008) prop ˆos um m ´etodo para apren-dizagem de relac¸ ˜oes temporais, espaciais e de apar ˆencia entre c ˆamaras para monitorizac¸ ˜ao conti-nua de longa durac¸ ˜ao. Atrav ´es de uma observac¸ ˜ao estat´ıstica, o m ´etodo proposto por Makris et al. (2004) determina automaticamente a topologia das c ˆamaras com vistas disjuntas. Para al ´em de calcular automaticamente a topologia das c ˆamaras, Black et al. (2005) estima o tempo de transic¸ ˜ao entre os diversos pontos disjuntos.
Cap´ıtulo 3
Metodologia Proposta
Este cap´ıtulo descreve a metodologia proposta para a detecc¸ ˜ao de m ´ultiplos focos de inc ˆendio e, simultaneamente, detecc¸ ˜ao e seguimento de m ´ultiplos objectos em tempo real, em ambientes exteriores e com alterac¸ ˜oes din ˆamicas das condic¸ ˜oes de luminosidade inerentes ao local onde o sistema de v´ıdeo vigil ˆancia est ´a instalado.
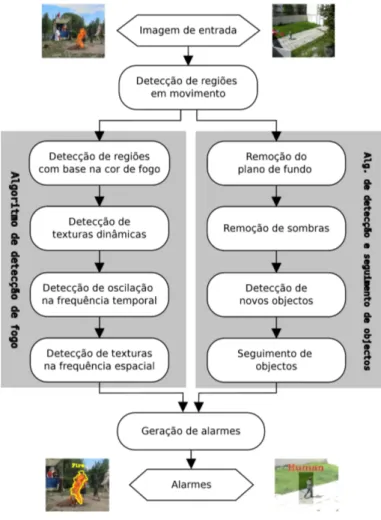
O sistema proposto ´e composto pelos algoritmos de detecc¸ ˜ao de fogo e detecc¸ ˜ao e seguimento de objectos, descritos nas secc¸ ˜oes 3.2 e 3.3, respectivamente. Para a detecc¸ ˜ao de focos de inc ˆendio s ˜ao analisados a informac¸ ˜ao da cor das regi ˜oes de p´ıxeis em movimento (descrito na secc¸ ˜ao 3.1) e as caracter´ısticas din ˆamicas conhecidas do fogo no dom´ınio da frequ ˆencia. Os m ´etodos imple-mentados para a detecc¸ ˜ao e seguimento de objectos incluem t ´ecnicas de segmentac¸ ˜ao de regi ˜oes de movimento, filtros estoc ´asticos para o seguimento de objectos e classificadores treinados para a discriminac¸ ˜ao entre um objecto gen ´erico e um humano.
Com base no algoritmo de detecc¸ ˜ao de fogo ´e poss´ıvel diferenciar uma regi ˜ao de fogo de um ob-jecto em movimento com cores semelhantes `as das chamas. No entanto, obob-jectos com movimentos repetitivos podem afectar a robustez dessa diferenciac¸ ˜ao. Neste sentido, o sistema proposto nesta dissertac¸ ˜ao integra o resultado dos dois algoritmos (ver Secc¸ ˜ao 3.5) de modo a reduzir a taxa de falsos alarmes na detecc¸ ˜ao de fogo, eliminando os alarmes provenientes dos referidos objectos.
Consoante o tipo de evento que ocorre no campo de vis ˜ao da c ˆamara, o sistema reporta alarmes com as coordenadas do evento no sistema de posicionamento global (GPS). Esta capacidade deve-se `a calibrac¸ ˜ao do sistema, detalhada na deve-secc¸ ˜ao 3.4.
Cap´ıtulo 3. Metodologia Proposta
De seguida, o algoritmo de detecc¸ ˜ao e seguimento de pessoas ´e executado, onde o plano de fundo ´e removido para extrair as regi ˜oes de movimento com base na hist ´oria dos p´ıxeis. Caso uma regi ˜ao de movimento seja detectada (objecto), ´e aplicado o m ´etodo de remoc¸ ˜ao de sombras para extrair os p´ıxeis considerados sombra. Quando um determinado objecto for consecutivamente detectado e apresentar movimento, este ´e seguido atrav ´es de um filtro de part´ıculas, que estima a sua posic¸ ˜ao atrav ´es do modelo de cor que o define. Por fim, o objecto ´e definido como humano atrav ´es de um classificador baseado em histogramas de gradientes orientados (HOG).
O ´ultimo passo do sistema ´e a integrac¸ ˜ao dos resultados dos referidos algoritmos. Esta integrac¸ ˜ao ´e essencial para verificar se um resultado positivo da an ´alisewaveletdo algoritmo de detecc¸ ˜ao de fogo ´e causado por um objecto em movimento. Por fim, ´e gerado um conjunto de alarmes (fogo, movimento e seguimento) consoante o tipo de evento a ocorrer no ambiente.
Figura 3.1:Diagrama de processamento do sistema proposto para a detecc¸ ˜ao de fogo e detecc¸ ˜ao e seguimento de objectos para cada nova imagem.
3.1
Detecc¸ ˜ao de Regi ˜oes de Movimento
3.1. Detecc¸ ˜ao de Regi ˜oes de Movimento
da substituic¸ ˜ao da subtracc¸ ˜ao adaptativa do plano de fundo pelo algoritmo de componentes ligados, nesta dissertac¸ ˜ao apenas ´e considerada a diferenciac¸ ˜ao de tr ˆes imagens consecutivas. Assim, a informac¸ ˜ao de um pixel ´e considerada em movimento se o valor da sua intensidade variar significa-tivamente entre a imagem actual e as duas imagens anteriores, ou seja,
M ={(x, y) : (|Isn(x, y)−Isn
−1(x, y)|>
Tn(x, y)) ∧ (|Isn(x, y)−Isn
−2(x, y)|>
Tn(x, y))}, (3.1)
ondeIsn representa a intensidade do pixel na posic¸ ˜ao(x, y)na imagemn. O par ˆametroTn
repre-senta o limiar de diferenciac¸ ˜ao que descreve uma mudanc¸a significativa na intensidade do pixel na posic¸ ˜ao(x, y)emn.
O modelo de plano de fundo Bn e o limiar de diferenciac¸ ˜ao Tn s ˜ao actualizados ao longo do
tempo atrav ´es das express ˜oes:
Bn(x, y) =
αBn−1(x, y) + (1−α)Isn−1(x, y), se(x, y) ∈/M, Bn−1(x, y), se(x, y) ∈M.
(3.2)
Tn(x, y) =
αTn−1(x, y) + (1−α)(5|Ins−1(x, y)−Bn(x, y)|), se(x, y) ∈/M,
Tn(x, y), se(x, y) ∈M,
(3.3)
ondeαrepresenta uma constante que especifica a velocidade pela qual as novas observac¸ ˜oes se sobrep ˜oem `as observac¸ ˜oes anteriores, definida no intervalo[0, 1]. Quando se pretende extrair ape-nas as regi ˜oes de movimento da imagem actual, sem ter em considerac¸ ˜ao o movimento das mesmas em instantes anteriores, o par ˆametroα ´e definido como 1. No instante inicial,B0 ´e actualizado com
a primeira imagem do sistema eT0 ´e definido como um valor superior a zero (ver em baixo).
Na figura 3.2 est ˜ao expostos resultados do m ´etodo quando aplicado em ambientes exteriores, contendo chamas e pessoas em movimento.
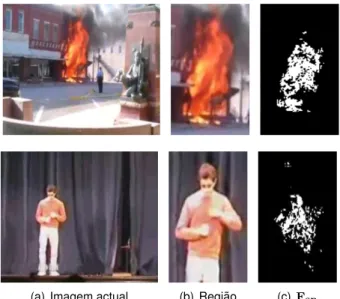
(a) Imagem actual (b)IHBE
Cap´ıtulo 3. Metodologia Proposta
´
E importante notar que o valor inicial do limiar de diferenciac¸ ˜aoT0 necessita de reflex ˜ao, pois
quanto mais elevado for o seu valor, menos sens´ıvel se torna o m ´etodoHBEna detecc¸ ˜ao de regi ˜oes de movimento. A figura 3.3 ilustra tr ˆes exemplos do resultado do m ´etodo para a estimac¸ ˜ao do plano de fundo para diferentes valores do limiar de diferenciac¸ ˜aoT0.
(a) (b) (c) (d)
Figura 3.3: (a) Imagem actual; m ´ascara resultante do m ´etodo HBE para diferentes valores do limiar de diferenciac¸ ˜aoT0no ambiente da figura (a), definido como 5 (b), 10 (c) e 15 (d).
Na figura 3.3(b) o limiarT0foi definido como 5, apresentando assim uma maior segmentac¸ ˜ao das regi ˜oes de movimento. No entanto este limiar ´e demasiado baixo, visto que a m´ınima alterac¸ ˜ao de movimento na imagem actual ´e detectada, acrescentando demasiado ru´ıdo. No caso da fi-gura 3.3(d), o limiar de diferenciac¸ ˜ao foi definido como 15 e assim n ˜ao s ˜ao apresentadas as regi ˜oes de movimento provenientes das folhas das ´arvores (lado direito da imagem). No entanto, este li-miar ´e demasiado elevado para se segmentar o movimento de objectos de pequena dimens ˜ao. Neste sentido, ap ´os uma parametrizac¸ ˜ao do limiar de diferenciac¸ ˜ao, este foi definido como 10. A figura 3.3(c) apresenta o resultado do m ´etodo HBEpara esta parametrizac¸ ˜ao, onde o movimento proveniente das folhas das ´arvores n ˜ao ´e significativo, ao mesmo tempo que segmenta o movimento das pessoas (incluindo as suas sombras).
3.2
Algoritmo de Detecc¸ ˜ao de Fogo
Esta secc¸ ˜ao descreve os m ´etodos implementados para a detecc¸ ˜ao de fogo e o trabalho realizado no ˆambito da dissertac¸ ˜ao para aumentar a robustez e efici ˆencia da referida detecc¸ ˜ao.
3.2.1
Detecc¸ ˜ao de Regi ˜oes de P´ıxeis Com Base na Cor do Fogo
As cores das chamas s ˜ao normalmente avermelhadas, tornando-se azuis `a medida que a tempe-ratura do fogo aumenta ou amarelas quando a tempetempe-ratura do fogo diminui (Drysdale, 2011). Cada imagem digital a cores ´e composta por tr ˆes planos de cores: vermelho (R), verde (G) e azul (B). A combinac¸ ˜ao de planos de coresRGB permite representar uma determinada cor em componentes digitais, sendo este espac¸o de cores um dos mais usados para processamento digital de imagens.
3.2. Algoritmo de Detecc¸ ˜ao de Fogo
Uma das contribuic¸ ˜oes desta dissertac¸ ˜ao ´e estudar e analisar a efici ˆencia de alguns dos m ´etodos de classificac¸ ˜ao dos p´ıxeis com base na cor presentes na literatura. Neste sentido, seguidamente s ˜ao descritos os m ´etodos propostos por Celik and Demirel (2009), Horng et al. (2005) e Chen et al. (2010), que recorrem a diferentes m ´etricas e espac¸os de cores para segmentar regi ˜oes com chamas. De referir que o objectivo de um espac¸o de cores ´e facilitar a representac¸ ˜ao das cores de uma imagem atrav ´es de um padr ˜ao, isto ´e, um modelo matem ´atico para formalizar a descric¸ ˜ao de cores.
3.2.1.1 M ´etodos de Classificac¸ ˜ao dos P´ıxeis Com Base na Cor
O primeiro m ´etodo de classificac¸ ˜ao dos p´ıxeis com base na cor descrito ´e proposto por Chen et al. (2010), que se baseia na filtragem dos p´ıxeis atrav ´es de um conjunto de regras que descrevem as caracter´ısticas da cor das chamas no espac¸o de coresRGB, ou seja,
Regra 1: R≥RT ∧ R≥G≥B (3.4)
Regra 2: Y2≤S≤Y1, (3.5)
ondeR,GeBrepresentam os componentes vermelho, verde e azul no espac¸o de coresRGBde um determinado pixel da imagem. O par ˆametroRT (definido como 120) ´e o valor global da componente
vermelha. A segunda regra ´e utilizada para restringir a saturac¸ ˜ao da cor, eliminando assim as regi ˜oes com elevada iluminac¸ ˜ao. As curvasY1eY2 representam os limites superior e inferior da correlac¸ ˜ao
entre a componente azul e a saturac¸ ˜ao, dado pela express ˜ao:
Y1=
100−0.48B, seB≥117,
79.27−0.311B, seB <117.
(3.6)
Y2=−2.0147 + 90.59435e−B/77.6027, (3.7)
onde o valor de saturac¸ ˜ao (S) de um determinado pixel ´e obtido atrav ´es da convers ˜ao entre o espac¸o de coresRGBeHSV, dado pela express ˜ao:
H =arcos 1
2((R−G) + (R−B))
p
((R−G)2+ (R−B)(G−B)) (3.8)
S= 1−3min(R, G, B)
R+G+B (3.9)
V = 1
3(R+G+B), (3.10)
ondeHrepresenta a componente matiz, definida como a cor dominante. A componente saturac¸ ˜ao mede a proporc¸ ˜ao de cor e a componente valor (V) est ´a relacionado com a luminosidade da cor.
Cap´ıtulo 3. Metodologia Proposta
com as regi ˜oes de p´ıxeis em movimento (pertencentes ao conjuntoM) que validam as duas regras previamente descritas (ver figura 3.4).
(a) (b)
Figura 3.4: (b) Resultado do m ´etodo de classificac¸ ˜ao dos p´ıxeis com base na cor proposto por Chen et al. (2010) aplicado `a figura (a).
Outro dos m ´etodos analisados nesta dissertac¸ ˜ao foi proposto por Celik and Demirel (2009). Este utiliza o espac¸o de cores YCbCr para eliminar o efeito da luminosidade, construindo um modelo gen ´erico de classificac¸ ˜ao dos p´ıxeis com base na cor atrav ´es de um conjunto pr ´e-definido de regras. O espac¸o de coresYCbCr´e composto por tr ˆes componentes:Yrepresenta a luminosidade;CbeCr
s ˜ao dois valores de cor formados atrav ´es da subtracc¸ ˜ao da componente luminosidade com as com-ponentes azul e vermelho do espac¸o de coresRGB, denominados cromin ˆancia azul e cromin ˆancia vermelho, respectivamente. A convers ˜ao entre o espac¸o de coresRGBeYCbCr´e dada por:
Y Cb Cr =
0.2568 0.5041 0.0979
−0.1482 −0.2910 0.4392 0.4392 −0.3678 −0.0714
R G B + 16 128 128
, (3.11)
ondeYrepresenta a componente luminosidade contida no intervalo[16, 235]. Os par ˆametrosCbeCr
representam as componentes cromin ˆancia azul e cromin ˆancia vermelho, respectivamente, contidas no intervalo[16, 240].
O conjunto de regras definidas por Celik and Demirel (2009) para segmentar regi ˜oes de chamas com base na informac¸ ˜ao da cor dos p´ıxeis s ˜ao dadas por:
Regra 1: Y > Cb ∧ Cr > Cb (3.12)
Regra 2: Y > Ymean ∧ Cb > Cbmean ∧ Cr > Crmean, (3.13)
onde Y, Cb e Cr s ˜ao as componentes luminosidade, cromin ˆancia azul e cromin ˆancia vermelho de um determinado pixel da imagem, respectivamente. Os par ˆametros Ymean, Cbmean e Crmean
representam o valor m ´edio das tr ˆes componentes do espac¸o de coresYCbCr.
3.2. Algoritmo de Detecc¸ ˜ao de Fogo
(a) (b) (c)
(d) (e) (f)
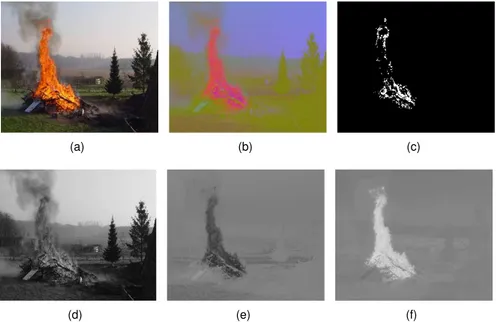
Figura 3.5:Classificac¸ ˜ao dos p´ıxeis com base na cor atrav ´es do espac¸o de coresYCbCr. (a) Imagem original; (b) imagem convertida para o espac¸o de coresYCbCr; (c) resultado do m ´etodo de classificac¸ ˜ao dos p´ıxeis com base na cor proposto por Celik and Demirel (2009); componentes: luminosidade (d), cromin ˆancia vermelho (e) e cromin ˆancia azul (f) do espac¸o de coresYCbCrda figura (a).
O ´ultimo m ´etodo em an ´alise foi proposto por Horng et al. (2005), que utiliza o espac¸o de coresHSI
e aplica o m ´etodo de separac¸ ˜ao de cores para segmentar regi ˜oes com cores semelhantes `as das chamas. O espac¸o de coresHSI´e formado por tr ˆes componentes: (1) o matiz que est ´a relacionado com o comprimento espectral da onda que produz a percepc¸ ˜ao da cor; (2) a componente saturac¸ ˜ao que est ´a relacionada com a pureza da cor, isto ´e, a quantidade de cor em relac¸ ˜ao `a cor cinza m ´edia; (3) a componente intensidade (I) que est ´a associada ao brilho da cor (Vassili et al., 2003). A convers ˜ao entre o espac¸os de coresRGBeHSI ´e dada pelas express ˜oes:
I=1
3(r+g+b) (3.14)
S= 1− 3
(r+g+b)[min(r+g+b)] (3.15)
H =
θ, se b≤g,
360−θ, se b > g. (3.16)
θ=cos−1
1
2[(r−g) + (r−b)
[(r−g)2+ (r−b)(g−b)]1 2
, (3.17)
onde os valores das componentes r, g e b do espac¸o de coresRGBest ˜ao normalizados no intervalo [0, 1], atrav ´es das express ˜oes:
r= R
R+G+B, g= G
R+G+B, b= B
Cap´ıtulo 3. Metodologia Proposta
Atrav ´es de uma an ´alise emp´ırica, Horng et al. (2005) efectuou uma an ´alise `as caracter´ısticas de cor das chamas de acordo com o espac¸o de coresHSI, aplicando posteriormente o m ´etodo de separac¸ ˜ao de cores para segmentar regi ˜oes com apar ˆencia semelhante ao fogo, construindo assim um conjunto de p´ıxeis considerados chamas,
Cf([h1, h2],[s1, s2],[i1, i2]) ={(H, S, I)|h1≤H≤h2, s1≤S≤s2 ∧ i1≤I≤i2}, (3.19)
onde h1, h2, s1, s2, i1 e i2 s ˜ao os valores m ´aximos e m´ınimos das tr ˆes componentes do espac¸o de
coresHSI, expressos atrav ´es de um estudo detalhado das caracter´ısticas das chamas no referido espac¸o de cores (Horng et al., 2005). Os par ˆametrosH,SeIs ˜ao os componentes matiz, saturac¸ ˜ao e intensidade do espac¸o de coresHSI, respectivamente.
Com base na informac¸ ˜ao da cor dos p´ıxeis da imagem actual, o m ´etodo proposto por Horng et al. (2005) cria uma m ´ascara com as regi ˜oes de p´ıxeis em movimento que estejam contidos no conjunto
Cf. As componentes matiz, saturac¸ ˜ao e intensidade, a convers ˜ao para o espac¸o de coresHSIe o
resultado do m ´etodo de classificac¸ ˜ao dos p´ıxeis com base na cor proposto por Horng et al. (2005) est ˜ao expostos na figura 3.6.
(a) (b) (c)
(d) (e) (f)
Figura 3.6:(a) Imagem original; (b) imagem convertida para o espac¸o de coresHSI; (c) resultado do m ´etodo de classificac¸ ˜ao dos p´ıxeis com base na cor proposto por Horng et al. (2005); componentes: matiz (d), saturac¸ ˜ao (e) e intensidade (f) do espac¸o de coresHSIda figura (a).
3.2.1.2 An ´alise do Desempenho dos M ´etodos de Classificac¸ ˜ao dos P´ıxeis com Base na Cor
3.2. Algoritmo de Detecc¸ ˜ao de Fogo
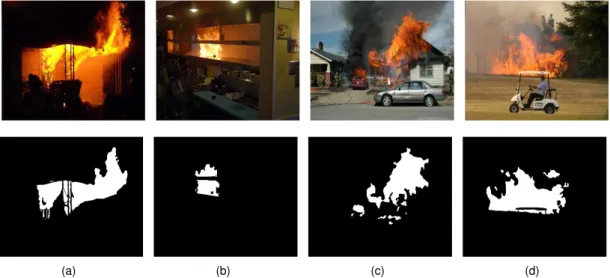
Considerando que os sistemas de v´ıdeo vigil ˆancia est ˜ao presentes na grande maioria dos am-bientes urbanos, ´e tamb ´em verificado o comportamento dos referidos classificadores consoante o tipo de ambiente no qual o sistema de v´ıdeo vigil ˆancia est ´a instalado. Para tal, foram utilizadas 217 imagens retiradas de s´ıtios na Internet, contendo chamas decorrentes de situac¸ ˜oes quotidianas, di-vididas em 4 categorias: interior, noite, rural e urbano. Com base nas imagens, foi executada uma segmentac¸ ˜ao manual para criar m ´ascaras que cont ˆem apenas as regi ˜oes com chamas. A figura 3.7 retrata exemplos das referidas categorias e a m ´ascara utilizada para a an ´alise do desempenho dos m ´etodos de classificac¸ ˜ao dos p´ıxeis com base na cor.
(a) (b) (c) (d)
Figura 3.7: Segmentac¸ ˜ao manual das regi ˜oes de chamas. A primeira linha mostra as imagens originais e a segunda as m ´ascaras resultantes da segmentac¸ ˜ao manual das chamas, relativas `as categorias noite (a), interior (b), urbano (c) e rural (d).
Para al ´em da an ´alise da efici ˆencia dos m ´etodos de classificac¸ ˜ao dos p´ıxeis com base na cor ba-seados nos espac¸os de coresHSI,YCbCreRGB, s ˜ao tamb ´em analisadas duas das suas poss´ıveis combinac¸ ˜oes, HYe HYR. Os p´ıxeis destas combinac¸ ˜oes s ˜ao classificados como fogo atrav ´es da acumulac¸ ˜ao do resultado dos m ´etodos que se baseiam nos espac¸os de coresHSIeYCbCrpara a primeira combinac¸ ˜ao e nos espac¸os de coresHSI,YCbCreRGBpara a segunda combinac¸ ˜ao.
A tabela 3.1 apresenta os resultados obtidos com os tr ˆes m ´etodos de classificac¸ ˜ao dos p´ıxeis previamente descritos e com os modelos de cor propostos nesta dissertac¸ ˜ao,HYReHY. A m ´etrica utilizada foi aMatthews Correlation Coefficients (MCC), que permite a classificac¸ ˜ao bin ´aria de ima-gens, tendo em considerac¸ ˜ao verdadeiros e falsos positivos, e os verdadeiros e falsos negativos. De referir que umMCCde 1 representa uma classificac¸ ˜ao perfeita.
Tabela 3.1:Resultados experimentais da detecc¸ ˜ao de fogo atrav ´es do m ´etodo de classificac¸ ˜ao dos p´ıxeis com base na cor (MCC)
Categorias # Imagens HSI YCbCr RGB HYR HY
Urbano 124 0.78 0.51 0.19 0.81 0.83
Rural 73 0.73 0.57 0.17 0.77 0.79
Interior 20 0.36 0.47 0.12 0.43 0.46
Noite 21 0.60 0.61 0.01 0.64 0.64