PONTERETIFICADORATIRISTORIZADACONTROLADAATRAVÉSDEUMPSOC
EDUARDO M. VICENTE*, ROBSON L. MORENO*, CARLOS A. GALLO**, ENIO R. RIBEIRO*
*Grupo de Microeletrônica, Instituto de Engenharia de Sistemas e Tecnologia da Informação (IESTI), Universidade Federal de Itajubá.
Av. BPS, 1303 - Bairro Pinheirinho 37500-903 Itajubá, MG, Brasil **Faculdade de Engenharia Mecânica, Curso de Engenharia Mecatrônica,
Universidade Federal de Uberlândia.
Av. João Naves de Ávila, 2160, Campus Santa Mônica - Bloco 1M - 38400-902 Uberlândia, MG, Brasil E-mails: ewb.engenharia@gmail.com, moreno@unifei.edu.br,
gallo@mecanica.ufu.br, enio.k@unifei.edu.br
Abstract⎯ This work presents the design and implementation of a control system for a thyristorized rectifier bridge held by PSoC (Programmable System-on-Chip), which is able to maintain the output current of the circuit in a predetermined reference supporting changes in input voltage, as well as changes in load. Using a System-on-Chip, specifically, the PSoC – designed by Cypress Semiconductor Corp., utilized in mixed-signal (analog and digital) applications – it is possible to reduce the external circuitry. The project built with the PSoC, compared with a conventional implementation, is smaller and has lower costs. Another important aspect is related to the decrease in energy consumption due to the use of fewer components. The rectifier and its control system were designed and simulated. Additionally, a prototype was built and the tests proved the feasibility of using PSoC.
Keywords⎯ Programmable System-on-Chip (PSoC), Thyristorized Rectifier Bridge, Current Control.
Resumo⎯ Apresenta-se neste trabalho o projeto e a implementação de um sistema de controle de uma ponte retificadora tiristorizada, realizado através do PSoC (Programmable System-on-Chip), que é capaz de manter a corrente de saída do circuito em uma referência pré-estabelecida, suportando variações na tensão de entrada, bem como modificações na carga. Com o uso de um System-on-Chip, isto é, do PSoC – concebido e fabricado pela Cypress Semiconductor Corp., voltado para aplicações de sistemas com sinais mistos (analógico e digital) – é possível diminuir os circuitos externos. O projeto final construído com o PSoC, quando comparado com uma implementação convencional, tem menor dimensão e menor custo. Outro aspecto importante está relacionado à diminuição no consumo de energia, em virtude da utilização de um número menor de componentes. O retificador e seu sistema de controle foram projetados e simulados. Adicionalmente, construiu-se um protótipo e com os ensaios comprovou-se a viabilidade da utilização do PSoC.
Palavras-chave⎯ Programmable System-on-Chip (PSoC), Ponte Retificadora Tiristorizada, Controle de Corrente.
1 Introdução
Uma das necessidades existentes nos sistemas elétricos é a conversão de uma tensão alternada em uma tensão contínua. Para essa tarefa são utilizadas pontes retificadoras, que produzem na saída uma tensão contínua variável. Nas quais os sistemas de controle utilizam diferentes circuitos integrados (CIs), que precisam de circuitos auxiliares, de forma a permitir que os sinais provenientes de cada parte do circuito sejam convertidos para o formato adequado ao próximo estágio.
Analisando algumas aplicações da ponte retificadora, tem-se o sistema desenvolvido por Sinzato (1991), que utiliza o microprocessador MC6809 para realizar o controle de uma ponte retificadora trifásica, que alimenta um motor de corrente contínua (MCC). Os circuitos dessa aplicação são componentes discretos e circuitos integrados auxiliares, como é o caso do temporizador VIA6522, que é responsável pela geração do pulso de disparo dos tiristores.
Na aplicação de Vermaas (1996), um conversor dual que alimenta um MCC, utiliza-se um número menor de circuitos externos, pois uma maior quantidade de funções é realizada através do microcontrolador 68HC11. Entretanto, o sistema de
geração e adequação dos pulsos de disparo depende de componentes extras, como: contador, comparador e demultiplexador.
Finalmente, no trabalho de Pereira (2003), é visto um sistema de controle para um motor de indução trifásico. Apesar de o mesmo utilizar um circuito próprio para o disparo de dispositivos controláveis, o TCA780, que resulta numa diminuição considerável no número de componentes externos, o controle do sistema é realizado através de controladores PI analógicos.
O sistema desenvolvido neste trabalho levou em consideração os circuitos utilizados nas aplicações citadas anteriormente, (Sinzato, 1991), (Vermaas, 1996) e (Pereira, 2003), observando as vantagens e desvantagens de cada uma das abordagens, a fim de verificar as partes do circuito que poderiam ser integradas no PSoC, diminuindo assim o número total de circuitos externos.
2 Microcontrolador PSoC
Os circuitos System-on-Chip (SoC) são dispositivos que possuem diversos recursos, sejam eles analógicos ou digitais, em apenas um chip. Esse tipo de circuito é desejável, pois estando os componentes integrados em uma única pastilha diminuem-se as interferências externas, provenientes de trilhas de conexões e efeitos eletromagnéticos, tornando o SoC mais confiável e menos susceptível a erros (Júnior, 2005). Com esses dispositivos é possível projetar um sistema, com o mínimo de conexões externas e utilização de outros chips (Hock, 2004).
Além disso, como os recursos estão integrados, consegue-se obter uma maior velocidade de operação, maior confiabilidade do sistema e robustez, possibilitando o seu uso em determinadas aplicações.
Os circuitos presentes nos dispositivos SoC, como: conversores de sinais, interfaces de comunicação, dentre outros; podem gerar condições apropriadas às necessidades de determinado projeto, proporcionando, inclusive, a inserção de novos recursos à aplicação, devido à disponibilidade do mesmo no dispositivo.
Um dos tipos de SoC, o Programmable System-on-Chip (PSoC), que é um SoC programável, apresenta características distintas dos demais dispositivos. Nesse componente é possível configurar não só o código a ser executado, como também os recursos que se deseja utilizar e os pinos aos quais os mesmos são conectados. Essa flexibilidade aumenta o número de possíveis aplicações, pois é possível personalizar o dispositivo para atender às necessidades do projeto, (Nicolosi, 2006) e (Doboli, 2007)
Para este projeto, selecionou-se o PSoC (modelo CY8C29466-24PXI) pois o mesmo dispõe de recursos úteis à aplicação a que se destina, como: temporizadores, que serão utilizados na geração dos pulsos de disparo para os tiristores; conversores A/D, utilizados na conversão do valor da corrente de saída; amplificadores, e filtros, responsáveis pela adequação dos sinais. Outro fator levado em consideração para essa escolha foi a carência de artigos que envolvem a aplicação dessa tecnologia em eletrônica de potência.
3 Ponte Retificadora controlada através do PSoC
Em eletrônica de potência uma das necessidades existentes é a conversão da tensão alternada para a tensão contínua. Um dos dispositivos utilizados para a conversão de energia é a ponte retificadora, a qual
converte uma tensão alternada senoidal em uma tensão contínua. Existem, basicamente, dois tipos de pontes retificadoras, as controladas e as não-controladas. O componente utilizado em sua topologia define essa diferença. As pontes não-controladas são construídas com diodos, que, ao serem polarizados adequadamente, entram em condução e deixam a corrente fluir no circuito. Nas pontes controladas, um dos dispositivos de potência mais utilizados é o tiristor. Esse componente é semelhante ao diodo, com a diferença de possuir um pino de controle, chamado gate, que irá definir o instante de condução, e tem sido utilizado com novos enfoques, como visto em Buddingh (2000).
3.1 Circuitos auxiliares
Nesta seção são apresentados os circuitos utilizados no projeto. Alguns destes circuitos são semelhantes aos que estão presentes nas aplicações de Sinzato (1991), Vermaas (1996) e Pereira (2003).
Como circuito responsável pela detecção da passagem por zero e sincronismo dos pulsos de disparo foi utilizado o fototransistor 4N25 que funciona de maneira similar ao circuito visto em Sinzato (1991), é simples de se implementar e necessita apenas de dois resistores e um diodo, para adequar os sinais de entrada e saída do CI. Seu circuito é mostrado na Fig. 1.
Fig. 1 - Circuito de detecção da passagem por zero.
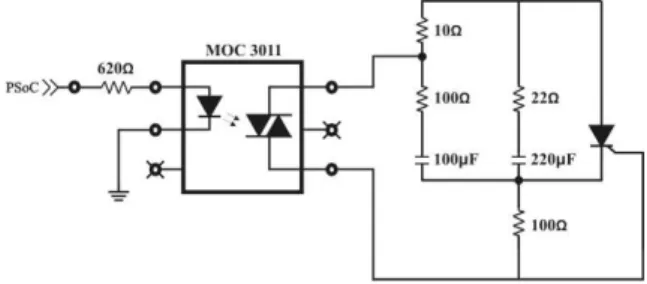
Para o acionamento dos tiristores utilizou-se o driver MOC3011, que é um optoacoplador com triac de saída. Esse componente é semelhante ao dispositivo visto em Sinzato (1991), e para utilizá-lo necessita-se de alguns resistores e capacitores nos circuitos de entrada e saída. Na Fig. 2 observa-se como o driver é conectado aos tiristores da ponte retificadora controlada.
Fig. 2 - Circuito de amplificação dos pulsos.
A forma de se determinar o ângulo de disparo foi através da comparação da tensão de controle Vc, com
característica de uma onda cossenoidal. Por meio desse método de comparação é possível obter uma relação linear do ângulo de disparo com a tensão média de saída, que resulta em uma melhor resposta do conversor. Em virtude dessa característica, esse tipo de comparação foi implementada no dispositivo.
Para a medição da corrente de saída optou-se pela utilização de um sensor Hall, LA-25NP, devido à sua simplicidade e facilidade de conexão com outros sistemas. O dispositivo foi configurado de forma que a relação de transformação ficou estabelecida em 1:200, ou seja, uma corrente medida de 5 A corresponderá a uma corrente de 25 mA na saída do sensor. O mesmo será utilizado nesse projeto e terá sua saída, que é obtida em forma de corrente, convertida em tensão, através de um resistor conectado ao pino M, para depois ser utilizada pelo PSoC. A forma como o sensor é conectado pode ser visto na Fig. 3. O capacitor CM
(de 1mF), que está em paralelo com a resistência RM
(de 200Ω), foi utilizado em virtude de uma resposta mais precisa do sistema de controle.
Fig. 3 – Circuito de medição da corrente de realimentação.
3.2 Circuitos desenvolvidos
A seguir são apresentados os circuitos desenvolvidos no PSoC em substituição, em alguns casos, a circuitos externos. Os pulsos de disparo, que irão acionar os tiristores, serão gerados pelo PSoC através de seus temporizadores internos, como ilustrado na Fig. 4. A saída dos temporizadores é conectada através de portas lógicas E à saída de um bloco PWM com freqüência de 10 kHz. Essa estratégia é bastante utilizada em Eletrônica de Potência, como visto em Barbi (2000), e tem o intuito de diminuir a potência dissipada no dispositivo de controle.
Fig. 4 – Diagrama de blocos do temporizador.
Para obter o valor médio da tensão no ponto M, que é proporcional à corrente de saída do circuito de potência, foi utilizado um filtro passa-baixa interno ao PSoC, visto na Fig. 5. Com esse recurso
eliminou-se a necessidade de capacitores externos, ou um circuito externo, composto de amplificadores operacionais, que fizesse o condicionamento da tensão, como o utilizado por Vermaas (1996).
Fig. 5 - Filtro passa-baixa interno ao PSoC.
A conversão do valor de tensão analógico, que é proporcional à corrente de saída e é obtido na saída do filtro passa-baixa, será realizada através do conversor A/D interno ao PSoC. A conversão dos dados é realizada através do método incremental, onde os sinais de entrada e de referência são integrados em cada uma das fases de clock. A utilização desse conversor elimina a necessidade de componentes externos, facilitando os ajustes, diminuindo as interferências e o custo final do projeto.
Para realizar o cálculo da tensão de controle Vc,
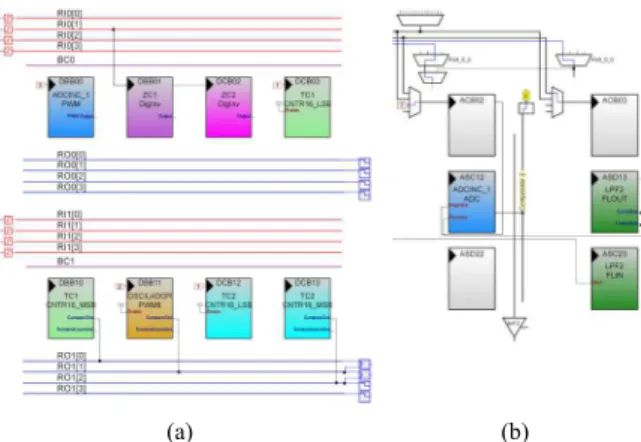
que será utilizada posteriormente para a obtenção do ângulo de disparo α, optou-se por um controlador PI para a malha de controle de corrente. Essa escolha levou em consideração os resultados obtidos nas aplicações analisadas. O controle é implementado no núcleo processador (M8C) interno ao PSoC, permitindo um ajuste rápido dos parâmetros, quando comparado com circuitos de controle analógicos e devido aos recursos do microcontrolador, como o MAC (Multiplicador Acumulador de 32 bits), os cálculos do controlador são realizados em um pequeno espaço de tempo. Tem-se, na Fig. 6, uma visão geral dos blocos internos do dispositivo.
(a) (b)
Fig. 6 - Projeto do circuito de controle e acionamento no PSoC Designer: (a) blocos digitais; (b) blocos analógicos.
Fig. 7 - Diagrama de blocos do circuito.
De posse do diagrama de blocos, desenvolveu-se o sistema de controle, onde os ganhos foram ajustados de forma que a resposta apresente resultados adequados a esse tipo de circuito.
4 Desenvolvimento do sistema de controle
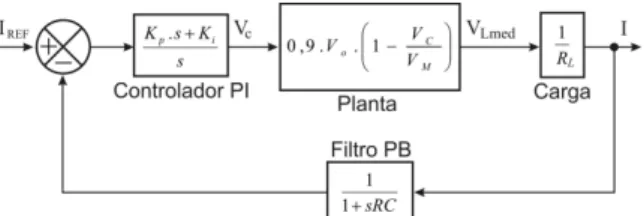
Para selecionar os ganhos do controlador PI e comprovar o seu funcionamento através de uma simulação computacional, a ponte retificadora e os circuitos utilizados para a medição da corrente de saída foram modelados, com o objetivo de criar um sistema fiel ao circuito projetado, (Phillips, 1984). O diagrama de blocos do sistema de controle pode ser visto na Fig. 8.
Fig. 8 - Diagrama de blocos do sistema de controle.
Iniciando o cálculo da função de transferência tem-se a equação apresentada em (4.1).
⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + = sRC R V V V s K s K R V V V s K s K s I s I L M C o i p L M C o i p REF 1 1 1 . 1 . . 9 , 0 . . 1 1 . 1 . . 9 , 0 . . ) ( ) ( (4.1)
Realizando as multiplicações, e considerando que:
VM = 5 V; Vo = 127 V; VC = 2 V;
RL = 10 Ω; R = 22 kΩ; C = 10 µF.
Resulta na equação (4.2).
⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + + + + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + + = 50 343 1036 2590 50 343 227 343 1554 343 1036 2590 343 343 1554 ) ( ) ( 2 2 p p i p i p p p i p i p REF K K K K K K s s K K K K K K s s s I s I (4.2)
Para obter os ganhos proporcional e integral, é feita uma comparação entre o sistema modelado e a
equação característica de um sistema de 2ª ordem. Os ganhos obtidos foram de: 0,33 (ganho proporcional) e 5,8 (ganho integral)
Através da simulação da função de controle, foram realizados ajustes nos ganhos, de forma a obter uma melhor resposta do controlador. Sendo assim, os valores escolhidos para os ganhos proporcional e integral, são: 12 , 1 = p
K , Ki =35,4
Estando definidas as constantes do circuito, realizou-se o projeto do circuito de controle simulado computacionalmente. O circuito simplificado é apresentado na Fig. 9.
Fig. 9 - Circuito elétrico simplificado da ponte retificadora controlada utilizada na simulação.
Utilizando um software de simulação, foram obtidas as formas de onda de saída, que serão mostradas na próxima seção.
5 Resultados
5.1 Resultados de simulação
Para comprovar o funcionamento do sistema de controle observou-se a resposta do mesmo a variações de carga e a variações na tensão de entrada.
A primeira situação apresenta a resposta do circuito a um degrau de carga. Como carga utilizou-se uma resistência de 20 Ω e a referência de corrente foi estabelecida em 2 A. A forma de onda da corrente média de saída é mostrada na Fig. 10.
Fig. 10 - Resposta do sistema de controle a um degrau (0,4A/div, 0,2s/div).
Fig. 11 – Corrente média de saída para uma variação negativa na carga de 50% (0,2A/div, 0,2s/div).
Na situação inversa, retirando-se a carga de 20 Ω que foi inserida previamente, é obtida a forma de onda ilustrada na Fig. 12. O tempo de acomodação observado foi de 800 ms e a variação da corrente de 16%.
Fig. 12 - Corrente média de saída para uma variação positiva na carga de 100% (0,2A/div, 0,2s/div).
No ensaio seguinte foi realizada uma variação na tensão de entrada. A carga foi mantida em 20 Ω e a corrente de referência modificada para 2 A. Ao variar a tensão de entrada de 100 para 75% o circuito apresentou o comportamento mostrado na Fig. 13. Foi possível observar um tempo de acomodação de 700 ms e uma variação da corrente de 8%.
Fig. 13 - Corrente média de saída para uma variação na tensão de entrada de 100 para 75% (0,4A/div, 0,2s/div).
Na situação contrária, uma variação de 75 para 100%, o tempo de resposta foi de 600 ms e o sobre-sinal de 10%. A forma de onda da corrente média de saída pode ser vista na Fig. 14.
Fig. 14 - Corrente média de saída para uma variação na tensão de entrada de 75 para 100% (0,4A/div, 0,2s/div).
Os resultados apresentados para o sistema de controle se mostraram satisfatórios e comprovam o funcionamento do controlador PI projetado.
5.2 Resultados experimentais
5.2.1 Placa de circuito impresso
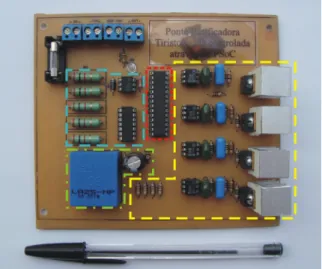
O aspecto final da placa é apresentado na Fig. 15. Tracejado, à esquerda, tem-se o circuito responsável pela passagem por zero. Marcado com ponto e traço, no canto inferior esquerdo, o circuito que realiza a medição da corrente de saída. À direita, marcado com traços, o circuito de disparo, junto com os tiristores da ponte, que estão acoplados a dissipadores de calor. Por fim, ao centro, pontilhado, o PSoC. As dimensões da placa são de 12x14 cm.
Fig. 15 - Aspecto final da placa de circuito impresso.
Como carga do circuito foram utilizadas 4 lâmpadas incandescentes, para tensão de alimentação de 127V, sendo três lâmpadas de 100 W e uma lâmpada de 200 W, totalizando uma carga de 500 W.
5.2.2 Tensão de entrada constante e carga variável
(a) (b)
(c) (d) Fig. 16 - Ensaio 1 com carga de 300 W: (a) circuito elétrico; (b)
tensão (VL) e corrente (IL)na carga; (c) tensão de entrada (Vi) e pulso de disparo dos tiristores T1 e T4 (Vpulso); (d) tensão de entrada (Vi) e pulso de disparo dos tiristores T2 e T3 (Vpulso).
Utilizou-se como carga uma lâmpada de 200 W em conjunto com uma lâmpada de 100 W e outras duas lâmpadas de 100 W, acionadas através de S1 e S2, como mostra o circuito da Fig. 16.
Outro aspecto a ser observado é o tempo gasto até que a saída do circuito se estabilize após uma variação na carga. Nas Figs. 17 e 18 é possível observar a corrente de saída do circuito e o tempo decorrido até que a mesma se torne estável novamente, durante a variação da carga de 300 para 400 W (fechamento de S1).
Fig. 17 - Corrente de saída na carga durante a variação de 300 para 400 W (2A/div, 0,1s/div).
Fig. 18 - Corrente média de saída no PSoC durante a variação da carga de 300 para 400 W. (0,5A/div, 0,2s/div)
Nesse ensaio o tempo de resposta se mostrou satisfatório, quando comparado com os resultados obtidos nas outras aplicações, tendo em vista que a cada segundo é possível realizar 120 iterações (uma a
cada 8,33 ms). A saída estabilizou-se em cerca de 600 ms e apresentou um sobre-sinal da ordem de 21%. O pico de corrente na carga, que é observado na Fig. 17, é causado pelas harmônicas de corrente na carga e é uma característica das pontes retificadoras a tiristor, segundo Barbi (2000). A corrente de saída do filtro passa-baixa, Fig. 18, apresenta valores diferentes da referência estabelecida. No gráfico, o valor medido é de aproximadamente 1,7 A, enquanto a referência é de 2 A. Essa diferença se justifica, em partes, devido à utilização de referências internas, pelo PSoC, para a adequação do sinal. Outra justificativa está relacionada ao número finito de valores de α, onde o sistema de controle irá selecionar o valor que mais se aproxima da referência estabelecida.
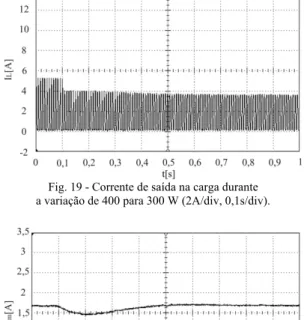
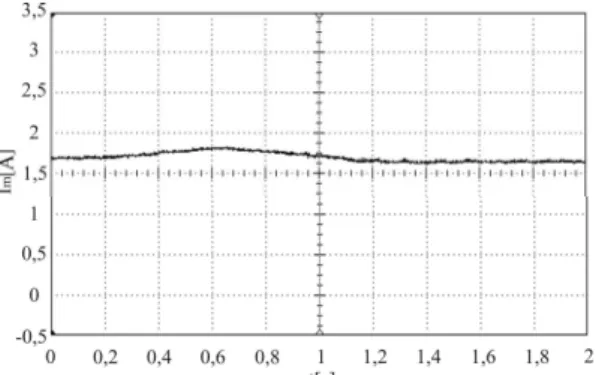
Na Fig. 19 e Fig. 20 é mostrado o momento de abertura de S1. O tempo de estabilização, na retirada da carga, foi de 600 ms e a variação da corrente de 14%.
Fig. 19 - Corrente de saída na carga durante a variação de 400 para 300 W (2A/div, 0,1s/div).
Fig. 20 - Corrente média de saída no PSoC durante a variação da carga de 400 para 300 W. (0,5A/div, 0,2s/div)
Utilizando a situação inicial do circuito, ou seja, os interruptores S1 e S2 abertos, ambas as chaves foram fechadas simultaneamente, provocando uma alteração na carga de 300 para 500 W. A forma de onda da corrente de saída nesse instante é vista nas Figs. 21 e 22. O tempo de resposta observado foi de 1,2 s e o sobre sinal de 46%.
Fig. 22 - Corrente média de saída no PSoC durante a variação da carga de 300 para 500 W (0,5A/div, 0,2s/div).
Na situação contrária, carga de 500 W e abertura simultânea de S1 e S2, têm-se as formas de onda observadas nas Figs. 23 e 24. A variação da corrente foi menor, comparando-se com a variação anterior, ficando em torno de 23% e o tempo de acomodação em 800 ms.
Fig. 23 - Corrente de saída na carga durante a variação de 500 para 300 W (2A/div, 0,1s/div).
Fig. 24 - Corrente média de saída no PSoC durante a variação da carga de 500 para 300 W (0,5A/div, 0,2s/div).
5.2.3 Carga constante e tensão de entrada variável
Para os ensaios apresentados a seguir, estabeleceu-se uma corrente de saída de referência, fixada em 2A, a carga foi mantida constante, em 300 W, e modificou-se a tensão de entrada através de um transformador variável. Esses ensaios foram realizados para comprovar a capacidade do sistema de controle de responder a variações da tensão de entrada.
Em um primeiro instante a tensão de entrada sofreu uma variação de 100 para 75%, resultando nas formas de onda da Fig. 25 e Fig. 26. A primeira situação teve um tempo de resposta de 1 s e pequena variação da corrente, em torno de 5%. Na segunda situação, variação de 75 para 100% na tensão de entrada, Figs. 27 e 28, o tempo de resposta foi da ordem de 900 ms e o sobre-sinal de 8%.
Fig. 25 – Tensão de entrada durante a variação de 100 para 75% (50V/div, 0,2s/div).
Fig. 26 - Corrente média de saída no PSoC durante a variação da tensão de entrada de 100 para 75% (0,5A/div, 0,2s/div).
Fig. 28 - Corrente média de saída no PSoC durante a variação da tensão de entrada de 75 para 100% (0,5A/div, 0,2s/div).
6 Conclusão
Desenvolveu-se neste trabalho o projeto e implementação de um sistema de controle para uma ponte retificadora a tiristores. Em uma primeira etapa o sistema de controle foi avaliado de forma computacional, o que veio a confirmar o funcionamento do sistema projetado e dos ganhos utilizados. No momento seguinte, o sistema foi implementado com componentes reais e com o microcontrolador PSoC. Os resultados obtidos foram considerados satisfatórios e semelhantes aos observados na simulação computacional.
Outra vantagem a ser destacada foi a considerável diminuição dos circuitos externos, principalmente quando comparado às soluções apresentadas por Vermaas (1996), Sinzato (1991) e Pereira (2003). Em comparação a esses casos, obteve-se uma redução de 40%, ou seja, de 5 para 3 circuitos externos.
Também deve-se evidenciar a facilidade de modificação do circuito, pois grande parte do mesmo, por estar integrada no PSoC, pode ser dinamicamente reconfigurada, um recurso existente no ambiente de desenvolvimento que permite criar diferentes configurações, possibilitando a alteração do circuito e da rotina de programação em tempo de execução.
Aliado ao benefício da diminuição das dimensões do circuito está o menor consumo de energia, aumento da densidade de potência e maior rendimento da estrutura, que possibilita a utilização desse tipo de solução em um número maior de aplicações.
Agradecimentos
À CAPES pelo apoio financeiro ao longo do curso de Mestrado em Engenharia Elétrica. À MSc. Eng. Paula dos Santos, pelo auxílio no trabalho. À FAPEMIG pelo apoio financeiro para participação no evento. E também ao INCT-EIE (Proc. nº. 574001/2008-5).
Referências Bibliográficas
Barbi, Ivo. (2000). Eletrônica de Potência. 3. ed. Florianópolis: Edição do Autor.
Buddingh, P.; St. Mars, J.R. (2000). New life for old thyristor power rectifiers using contemporary digital control, IEEE Transactions on Industry Applications, Vol. 36, Issue: 5. pp. 1449 - 1454. Doboli, A. N.; Currie, E. H. (2007). Introduction to
Mixed-Signal, Embedded Design. 1. ed. San Jose, California: Cypress Semiconductor Corporation, 473p.
Hock, B. C. L. (2004). PSoC optical sensor game pad - Project Number C2930. In: CIRCUIT CELLAR PSOC HIGH INTEGRATION CHALLENGE.
Júnior, V. C. (2005). Tecnologia SoC e o microcontrolador PSoC (Programmable System on Chip). Revista Integração, São Paulo, Ano XI, n.° 42, p. 251-257.
Li, Q.M. (2003) A low-cost configurable PWM controller using programmable system-on-chip Power Electronics Specialist Conference, 2003. PESC '03. IEEE 34th Annual Vol. 3, pp. 1169 - 1174.
Muresan, M.; Chindris, G. (2005). PSoC dual sensor for pressure and temperature using bipolar junction effects. Electronics Technology: Meeting the Challenges of Electronics Technology Progress, 2005. 28th International Spring Seminar on, pp. 62 – 66.
Nicolosi, D. E. C.; Santos, R. C. (2006). Microcontrolador PSoC: uma nova tecnologia, uma nova tendência. 1. ed. São Paulo: Érica, 414p.
Pereira, C. A. G. (2003). Otimização de reguladores para acionamento controlado de motores de indução alimentados por intermédio de inversor de corrente com comutação natural. 2003. 115 f. Dissertação (Mestrado em Ciências em Engenharia Elétrica) - Universidade Federal de Itajubá, Itajubá.
Phillips, C. L.; Nagle JR., H. T. (1984). Digital control system analysis and design. Prentice-Hall Inc, Englewood Cliffs, N. J.
Sinzato, M. G. (1991). Implementação de um controle de velocidade e corrente para motor de corrente contínua. 1991. 158 f. Dissertação (Mestrado em Ciências em Engenharia Elétrica) - Escola Federal de Engenharia de Itajubá, Itajubá.
Tong, C. C.; Tsai Y. J.; Li S. F.; Lin J. Y.; Ho M. H.; Lin Y. H. (2008). PSoC implementing vehicle auxiliary vacuum brake system with Kalman filter. IEEE Asia Pacific Conference on Circuits and Systems. APCCAS 2008. pp. 77 - 81. Vermaas, L. L. G.; Lenarth, G. L.; Valberto, F. V.