Capítulo 5
5 Espaço de Estados Discreto
A representação em forma de Matrizes de Estado é um das principais ferramentas de simulação de sistemas, e elas são formuladas diretamente no domínio em tempo contínuo ou discreto e não envolvem transformações para Laplace ou transformada Z.
5.1 Introdução à formulação de estado
Considerando um sistema massa-mola-amortecedor na forma, )
t ( u ) t ( ky ) t ( y c ) t ( y
m&& + & + =
Que pode ser reescrito como,
m ) t ( u ) t ( y ) t ( y 2 ) t (
y& + ζωn& +ω2n =
&
Definindo uma variável como,
) t ( y ) t ( x ) t ( y ) t (
x1 = ⇒ &1 = &
Definindo uma outra variável como,
) t ( y ) t ( x ) t ( x ) t ( y ) t (
x2 = & = &1 ⇒ &2 =&&
Substituindo na equação original e deixando somente uma variável com a derivada temporal, então,
m ) t ( u ) t ( x ) t ( x 2 ) t (
x 2 1
n 2
n
2 + ζω +ω =
&
Agora, escrevendo um sistema na seguinte forma,
) t ( u m / 1
0
) t ( x
) t ( x
2 0 1
) t ( x
) t ( x
2 1
n 2
n 2
1
⎭ ⎬ ⎫ ⎩ ⎨ ⎧ + ⎭ ⎬ ⎫ ⎩ ⎨ ⎧ ⎥ ⎦ ⎤ ⎢
⎣ ⎡
ζω − ω − = ⎭ ⎬ ⎫ ⎩ ⎨ ⎧ & &
Ainda está faltando a resposta y(t) do sistema, que é dada por,
[
]
{ }
0u(t)) t ( x
) t ( x 0 1 ) t ( y
2 1 +
⎭ ⎬ ⎫ ⎩ ⎨ ⎧ =
Que pode ser escrito da seguinte maneira, ) t ( Du ) t ( Cx ) t ( y
) t ( Bu ) t ( Ax ) t ( x
+ =
+ =
&
5.2 Nomenclatura de Espaço de Estados
Vetor de estado x(t) é o vetor de ordem n que contém todos os estados. Vetor de saída y(t) é o vetor de ordem m que contém todas as respostas. Vetor de entrada u(t) é o vetor de ordem r que contém todas as entradas.
Matriz de estado A é a matriz de ordem n×n que contém os autovalores e os autovetores do sistema.
Matriz de entrada B é a matriz de ordem n×r da entrada. Matriz de saída C é a matriz de ordem m×n da saída.
Matriz de transmissão direta D é matriz de ordem m×r que correlaciona diretamente a entrada com a saída.
Então,
{ }
[ ]
{ }
[ ]
{ }
{ }
m1[ ]
m n{ }
n1[ ]
m r{ }
r 1 1 r r n 1 n n n 1 n) t ( u D )
t ( x C )
t ( y
) t ( u B )
t ( x A )
t ( x
× ×
× ×
×
× ×
× ×
×
+ =
+ =
&
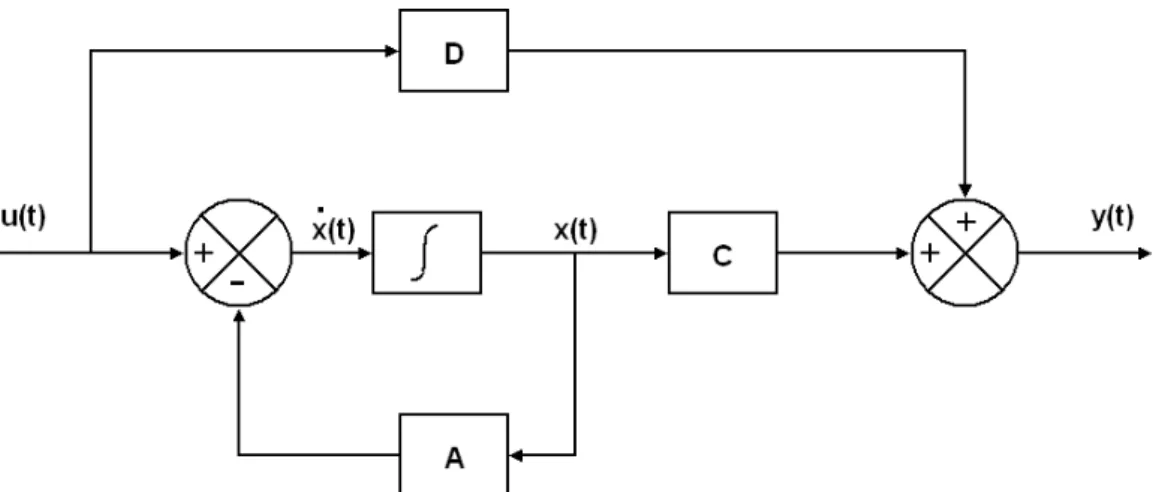
A representação em diagramas de bloco do sistema acima é dada por,
Figura 5.1: Representação em diagrama de blocos para tempo contínuo.
5.3 Representação de Espaço de Estados discretos
A formulação de espaço de estados discretos é dado por, )
k ( Du ) k ( Cx ) k ( y
) k ( Hu ) k ( Gx ) 1 k ( x
+ =
+ =
+
Nota-se que as matrizes C e D não mudaram, significando que são as mesmas matrizes para sistemas em tempo contínuo.
Agora, supondo um sistema discreto cuja função de transferência é dada por, n
n 1
1
n n 1
1 0
z a z
a 1
z b z
b b ) z ( U
) z ( Y
− −
− −
+ + +
+ + +
=
L L
Esta FT pode ser representada de várias maneiras em espaço de estados, pois a formulação de estado não é única.
A forma canônica controlável é dada por,
) k ( u
1 0 0 0
) k ( x
) k ( x
) k ( x
) k ( x
a a
a a
1 0
0 0
0 1
0 0
0 0
1 0
) 1 k ( x
) 1 k ( x
) 1 k ( x
) 1 k ( x
n 1 n
2 1
1 2
n 1 n n n
1 n
2 1
⎥ ⎥ ⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢ ⎢ ⎢
⎣ ⎡
+
⎪ ⎪ ⎪
⎭ ⎪⎪ ⎪
⎬ ⎫
⎪ ⎪ ⎪
⎩ ⎪⎪ ⎪
⎨ ⎧
⎥ ⎥ ⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢ ⎢ ⎢
⎣ ⎡
− −
− − =
⎪ ⎪ ⎪
⎭ ⎪⎪ ⎪
⎬ ⎫
⎪ ⎪ ⎪
⎩ ⎪⎪ ⎪
⎨ ⎧
+ + + +
− −
−
− M
M
L L
M O M
M M
L L
M
[
]
b u(k)) k ( x
) k ( x
) k ( x
b a b b
a b b a b ) k (
y 0
n 2 1
0 1 1 0
1 n 1 n 0 n
n +
⎪ ⎪ ⎭ ⎪ ⎪ ⎬ ⎫
⎪ ⎪ ⎩ ⎪ ⎪ ⎨ ⎧
− −
−
= − −
M L
Se a matriz G for uma matriz de posto cheio, isto é, o determinante é diferente de zero, o sistema é controlável, caso contrário, significa que pelo menos 1 dos estados não é controlável. A controlabilidade significa que o sistema pode ser alterado de qualquer estado para qualquer estado em um período de tempo finito.
5.3.2 Forma Canônica Observável
A forma canônica observável é dada por,
) k ( u
b a b
b a b
b a b
b a b
) k ( x
) k ( x
) k ( x
) k ( x
a 1 0
0
a 0 0
0
a 0
0 1
a 0
0 0
) 1 k ( x
) 1 k ( x
) 1 k ( x
) 1 k ( x
0 1 1
0 2 2
0 1 n 1 n
0 n n
n 1 n
2 1
1 2 1 n
n
n 1 n
2 1
⎥ ⎥ ⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢ ⎢ ⎢
⎣ ⎡
− − − −
+
⎪ ⎪ ⎪
⎭ ⎪⎪ ⎪
⎬ ⎫
⎪ ⎪ ⎪
⎩ ⎪⎪ ⎪
⎨ ⎧
⎥ ⎥ ⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢ ⎢ ⎢
⎣ ⎡
− − −
−
=
⎪ ⎪ ⎪
⎭ ⎪⎪ ⎪
⎬ ⎫
⎪ ⎪ ⎪
⎩ ⎪⎪ ⎪
⎨ ⎧
+ + + +
− −
− −
−
M M
L L
M O M M M
L L
M
[
]
b u(k)) k ( x
) k ( x
) k ( x
1 0
0 ) k (
y 0
n 2 1
+
⎪ ⎪ ⎭ ⎪ ⎪ ⎬ ⎫
⎪ ⎪ ⎩ ⎪ ⎪ ⎨ ⎧
=
M L
Para o sistema ser completamente observável, a matriz G deve ser uma matriz de posto cheio. A observabilidade significa que todos os estados do sistema podem ser observados ou medidos.
5.3.3 Forma Canônica Diagonal
Expandindo a FT em frações parciais tal que,
n n
2 2
1 1 0
p z
c p
z c p z
c b ) z ( U
) z ( Y
− + − + − +
= L
) k ( u
1 1 1
) k ( x
) k ( x
) k ( x
p 0
0 0
0 p
0
0 0
p
) 1 k ( x
) 1 k ( x
) 1 k ( x
n 2 1
n 2
1
n 2 1
⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢
⎣ ⎡
+
⎪ ⎪ ⎭ ⎪ ⎪ ⎬ ⎫
⎪ ⎪ ⎩ ⎪ ⎪ ⎨ ⎧
⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢
⎣ ⎡
=
⎪ ⎪ ⎭ ⎪ ⎪ ⎬ ⎫
⎪ ⎪ ⎩ ⎪ ⎪ ⎨ ⎧
+ + +
M M
L M O M
L L
M
[
]
b u(k)) k ( x
) k ( x
) k ( x
c c
c ) k (
y 0
n 2 1
n 2
1 +
⎪ ⎪ ⎭ ⎪ ⎪ ⎬ ⎫
⎪ ⎪ ⎩ ⎪ ⎪ ⎨ ⎧
=
M L
onde pi representa os pólos do sistema.
5.3.4 Forma Canônica de Jordan
A forma canônica de jordan é usada quando se deseja representar o sistema na forma diagonal mas existem pólos repetidos. Supondo que o pólo p1 é repetido m vezes,
então,
) k ( u
1 1 __ 1 0 0
) k ( x
) k ( x
_______ ) k ( x
) k ( x
) k ( x
p 0
0 p
] 0 [
] 0 [
p 0
0 0
0 1
p 0
0 0
1 p
) 1 k ( x
) 1 k ( x
_______ ) 1 k ( x
) 1 k ( x
) 1 k ( x
n 1 m m 2 1
n 1
m 1 1
1
n 1 m m 2 1
⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢
⎣ ⎡
+
⎪ ⎪ ⎪ ⎪ ⎪ ⎪
⎭ ⎪⎪ ⎪ ⎪ ⎪ ⎪
⎬ ⎫
⎪ ⎪ ⎪ ⎪ ⎪ ⎪
⎩ ⎪⎪ ⎪ ⎪ ⎪ ⎪
⎨ ⎧
⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢
⎣ ⎡
=
⎪ ⎪ ⎪ ⎪ ⎪ ⎪
⎭ ⎪⎪ ⎪ ⎪ ⎪ ⎪
⎬ ⎫
⎪ ⎪ ⎪ ⎪ ⎪ ⎪
⎩ ⎪⎪ ⎪ ⎪ ⎪ ⎪
⎨ ⎧
+ + + + +
+ +
+
M M
M M
L M O M
L L
M O M M M
L L
M M
[
]
b u(k)) k ( x
) k ( x
) k ( x
c c
c ) k (
y 0
n 2 1
n 2
1 +
⎪ ⎪ ⎭ ⎪ ⎪ ⎬ ⎫
⎪ ⎪ ⎩ ⎪ ⎪ ⎨ ⎧
=
M L
5.3.5 Não unicidade das matrizes de estado
A representação de estado não é única, isto é, para um mesmo sistema na forma de função de transferência pode haver várias representações de estado. Por exemplo, supondo que um sistema seja observável e controlável, definições que serão apresentada mais à frente, então haverá uma representação na forma canônica controlável e observável.
Para exemplificar, supondo o sistema na seguinte forma de estado, )
k ( Du ) k ( Cx ) k ( y
) k ( Hu ) k ( Gx ) 1 k ( x
+ =
+ =
+
) k ( xˆ P ) k (
x =
onde a matriz P é de ordem n×n, mesma ordem da matriz G. Então, )
k ( Du ) k ( xˆ CP ) k ( y
) k ( Hu ) k ( xˆ GP ) 1 k ( xˆ P
+ =
+ =
+
Que pode ser reescrito como,
) k ( Du ) k ( xˆ CP ) k ( y
) k ( Hu P ) k ( xˆ GP P ) 1 k (
xˆ 1 1
+ =
+ =
+ − −
Agora definindo,
GP P
Gˆ = −1 , Cˆ =CP e Hˆ =P−1H Então,
) k ( Du ) k ( xˆ Cˆ ) k ( y
) k ( u Hˆ ) k ( xˆ Gˆ ) 1 k ( xˆ
+ =
+ =
+
Que é exatamente da mesma forma que o sistema original. Se a matriz P for a matriz dos autovetores da matriz G, então o sistema será diagonalizado, caso isso não seja possível, a matriz resultante será a matriz de Jordan.
5.4 Simulando um sistema na forma de estado discreto
Nesta parte, supõe-se que o sistema seja linear e invariante no tempo na forma, )
k ( Du ) k ( Cx ) k ( y
) k ( Hu ) k ( Gx ) 1 k ( x
+ =
+ =
+
Pegando apenas os estados do sistema, para o instante inicial têm-se, )
0 ( Hu ) 0 ( Gx ) 1 (
x = +
Para o instante seguinte,
(
Gx(0) Hu(0))
Hu(1) G x(0) GHu(0) Hu(1) G) 1 ( Hu ) 1 ( Gx ) 2 (
x = + = + + = 2 + +
Para o instante seguinte,
(
)
) 2 ( Hu ) 1 ( GHu )
0 ( Hu G ) 0 ( x G
) 2 ( Hu ) 1 ( Hu ) 0 ( GHu )
0 ( x G G ) 2 ( Hu ) 2 ( Gx ) 3 ( x
2 3
2
+ +
+ =
= +
+ +
= +
=
Fazendo isso para k instantes,
∑
−= − − +
= k 1
0 j
1 j k k
) j ( Hu G
) 0 ( x G ) k (
x k = 1, 2, 3 ...
Substituindo este resultado em y(k),
) k ( Du ) j ( Hu G
) 0 ( x G C ) k ( y
1 k
0 j
1 j k
k +
⎟⎟ ⎠ ⎞ ⎜⎜
⎝ ⎛
+
=
∑
−= − −
k = 1, 2, 3 ...
5.5 Passando de Matrizes de Estado para FT
Supõe-se o sistema na forma,
) k ( Du ) k ( Cx ) k ( y
) k ( Hu ) k ( Gx ) 1 k ( x
+ =
+ =
+
) z ( DU ) z ( CX ) z ( Y
) z ( HU ) z ( GX ) 0 ( zx ) z ( zX
+ =
+ =
−
Supondo condições iniciais nulas,
(
zI G)
X(z) HU(z) X(z)(
zI G)
HU(z) )z ( HU ) z ( GX ) z (
zX = + ⇒ − = ⇒ = − −1
Substituindo em Y(z),
(
zI G)
HU(z) DU(z)[
C(
zI G)
H D]
U(z) C) z (
Y = − −1 + = − −1 +
Como a função de transferência pulsada é a relação dada por Y(z)/U(z),
(
zI G)
H DC ) z ( U
) z (
Y = − −1 +
Observe que se Y(z)/U(z) é uma matriz m×r.
5.6 Discretização de Matrizes de Estado Contínuas
Em se tratando de sistemas em tempo discreto, pode-se converter diretamente de matrizes de estado contínuas para matrizes de estado discretas. Porem é necessário fazer uma revisão de matrizes antes de mostrar o processo de discretização.
Em se tratando de matrizes há alguns cuidados a serem tomados e algumas definições a serem compreendidas. Começando com,
∑
∞= = + +
+ +
+ =
0 k
k k k
k 2
2 At
! k
t A t
A ! k
1 t
A ! 2 1 At I
e L L
Diferenciando esta solução em relação ao tempo, para isso a derivada é feita termo a termo, encontra-se,
A e Ae e
dt
d At At At
= =
Agora, três relações importantes,
I e eAt −At =
(A B)t At Bt
e e
e + = se AB = BA
(A B)t At Bt
e e
e + ≠ se AB ≠ BA
Agora, obtendo a resposta para matrizes de estado contínuas, isto é, )
t ( Bu ) t ( Ax ) t (
x& = + Que pode ser reescrita como,
) t ( Bu ) t ( Ax ) t (
x& − = Agora pré-multiplicando por e-At,
[
]
(
e x(t))
e Bu(t) dtd ) t ( Ax ) t ( x
e−At & − = −At = −At Integrando1 de 0 a t,
∫
τ τ=
− − τ
− t
0 A At
d ) ( Bu e ) 0 ( x ) t ( x e
Que pode ser rearranjada como,
( )
∫
τ τ+
= t −τ
0 t A At
d ) ( Bu e
) 0 ( x e ) t ( x
A equação acima representa a solução para um sistema na forma de estado contínuo. Para a solução completa, basta substituir os estados x(t) em,
1
) t ( Du ) t ( Cx ) t (
y = +
Para fazer o mesmo para um sistema discreto, tem-se que,
) kT ( Hu ) kT ( Gx ) T ) 1 k (( x )
t ( Bu ) t ( Ax ) t (
x& = + ⇒ + = +
Para que possa ser utilizada a solução de um sistema contínuo para encontrar a solução de um sistema discreto, assume-se que a entrada u(t) entre um período e outro de amostragem é constante, isto é, que há um ZOH, então,
) kT ( u ) t (
u = kT ≤ t < kT+T Então, a solução,
( )
∫
τ τ+
= t −τ
0 t A At
d ) ( Bu e
) 0 ( x e ) t ( x
Para o tempo kT,
∫
τ τ+
= kT − τ
0 A AkT AkT
d ) ( Bu e e ) 0 ( x e ) kT ( x
Para o tempo (k+1)T,
( +) + (( +) )( +
∫
) − τ τ τ=
+ k 1T
0 A T
1 k A T
1 k A
d ) ( Bu e e
) 0 ( x e ) T ) 1 k (( x
Agora fazendo,
( ) ( ) (( ) ) ( )
⎥ ⎦ ⎤ ⎢
⎣ ⎡
τ τ +
− τ τ +
= −
+ + +
∫
+ −τ kT∫
−τ0 kT A AkT
AT T
1 k
0
T 1 k A T
1 k A AT
d ) ( Bu e
) 0 ( x e e d ) ( Bu e
) 0 ( x e ) kT ( x e ) T ) 1 k (( x
Simplificando2,
( )
(
)
( ) ( )( ) ( )
∫
∫
∫
+ τ − +
τ − +
τ − + +
τ τ +
=
τ τ −
τ τ +
− +
= +
T 1 k
kT A T 1 k A AT
kT
0 A AkT AT T
1 k
0 A T 1 k A AkT
AT T 1 k A AT
d ) ( Bu e e
) kT ( x e
d ) ( Bu e e e d ) ( Bu e e
) 0 ( x e e e
) kT ( x e ) T ) 1 k (( x
Supondo agora o ZOH, então, o tempo entre kT e (k+1)T pode ser substituído por 0 e T dentro da integral, pois o que vai variar é apenas u(τ) que é considerado constante. Então,
∫
τ τ+ =
+ T − τ
0 A AT
ATx(kT) e e Bu( )d e
) T ) 1 k (( x
Aplicando a transformação de variável onde λ = T-τ,
∫
λ λ+ =
+ T λ
0 A
ATx(kT) e Bu( )d e
) T ) 1 k (( x
Que representa a solução da equação de estado discreta na forma, )
kT ( Hu ) kT ( Gx ) T ) 1 k ((
x + = +
Que neste caso, tem-se que para encontrar estas matrizes discretas, necessariamente,
AT e
G= e H e d B T
0 A
⎟⎟ ⎠ ⎞ ⎜⎜
⎝ ⎛
λ =
∫
λPelas equações acima, verifica-se claramente que as matrizes discretas são dependentes do tempo de amostragem.
2
A solução para y(kT) é dada simplesmente por, ) kT ( Du ) kT ( Cx ) kT (
y = +
Se a matriz A for não singular, então
(
e I) (
B e I)
A B AB d e
H 1 AT AT 1
T
0
Aλ = − − = − −
⎟⎟ ⎠ ⎞ ⎜⎜
⎝ ⎛
λ =
∫
Exemplo 5.1: Considerando o sistema abaixo, encontrar a representação de estado discreto e a expressão para função de transferência discreta para T = 1 s.
2 1 2
2 2
a s a s
b s
2 s
1 )
2 s ( s
1 )
s ( G
+ + = + = + =
Solução: O primeiro passo é encontrar uma representação de estado para o sistema, utilizando a forma canônica controlável,
[
]
⎭ ⎬ ⎫ ⎩ ⎨ ⎧ =
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + ⎭ ⎬ ⎫ ⎩ ⎨ ⎧ ⎥ ⎦ ⎤ ⎢
⎣ ⎡
− = ⎭ ⎬ ⎫ ⎩ ⎨ ⎧
) t ( x
) t ( x 0 1 ) t ( y
) k ( u 1 0 ) t ( x
) t ( x 2 0
1 0 ) t ( x
) t ( x
2 1
2 1
2 1
& &
Como foi visto, para as matrizes discretas têm-se3,
(
)
⎥ ⎦ ⎤ ⎢
⎣ ⎡ = ⎥ ⎥ ⎦ ⎤ ⎢
⎢ ⎣
⎡ −
= =
− −
1353 . 0 0
4323 . 0 1 e
0
e 1 2 1 1 e
G
T 2
T 2 AT
Outra forma de encontrar a matriz G é fazendo,
[ ]
(
)
(
)
⎥ ⎥ ⎥ ⎥ ⎦ ⎤
⎢ ⎢ ⎢ ⎢ ⎣ ⎡
+ + =
−
= −
2 s
1 0
2 s s
1 s 1 A
sI e
L At 1
Cuja transformada de laplace inversa é dada por,
(
)
(
)
⎥ ⎥ ⎦ ⎤ ⎢
⎢ ⎣
⎡ −
= ⎥ ⎥ ⎥ ⎥ ⎦ ⎤
⎢ ⎢ ⎢ ⎢ ⎣ ⎡
+ + =
− − −
t 2
t 2 1
At
e 0
e 1 2 1 1 2
s 1 0
2 s s
1 s 1 L e
Então,
(
)
(
)
(
)
⎥⎦⎤ ⎢
⎣ ⎡ = ⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢
⎣ ⎡
−
⎟⎟ ⎠ ⎞ ⎜⎜
⎝
⎛ + −
= ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢
⎣ ⎡
−
⎟⎟ ⎠ ⎞ ⎜⎜
⎝
⎛ + −
=
= ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎟⎟ ⎟ ⎠ ⎞ ⎜⎜
⎜ ⎝ ⎛
λ ⎥ ⎥ ⎦ ⎤ ⎢
⎢ ⎣
⎡ −
= ⎟⎟ ⎠ ⎞ ⎜⎜
⎝ ⎛
λ =
− −
− −
λ −
λ − λ
∫
∫
4323 . 0
2838 . 0 e
1 2 1
2 1 e T 2 1 1 0 e
1 2 1 0
2 1 e T 2 1 T
1 0 d e
0
e 1 2 1 1 B
d e H
T 2 T 2
T 2 T 2
T
0 2
2 T
0 A
Desta forma, o sistema discreto na forma de matrizes de estado é dado por,
3
∑
∞=
= + +
+ +
+ =
0 k
k k k
k 2
2 At
! k
t A t
A ! k 1 t
A ! 2 1 At I
[
]
⎭ ⎬ ⎫ ⎩
⎨ ⎧ =
⎥ ⎦ ⎤ ⎢
⎣ ⎡ + ⎭ ⎬ ⎫ ⎩
⎨ ⎧ ⎥ ⎦ ⎤ ⎢
⎣ ⎡ = ⎭ ⎬ ⎫ ⎩
⎨ ⎧
+ +
) k ( x
) k ( x 0 1 ) k ( y
) k ( u 4323 . 0
2838 . 0 ) k ( x
) k ( x 1353 . 0 0
4323 . 0 1 ) 1 k ( x
) 1 k ( x
2 1
2 1
2 1
Para a representação em FT discreta,
(
)
[
]
1353 . 0 z 1353 . 1 z
1485 . 0 z 2838 . 0 0 4323 . 0
2838 . 0 1353 . 0 0
4323 . 0 1 1 0
0 1 z 0 1
D H G zI C ) z ( G ) z ( U
) z ( Y
2 1
1
− −
+ =
+ ⎥ ⎦ ⎤ ⎢
⎣ ⎡ ⎟⎟ ⎠ ⎞ ⎜⎜
⎝ ⎛
⎥ ⎦ ⎤ ⎢
⎣ ⎡ − ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ =
+ −
= =
− −
O mesmo problema pode ser resolvido utilizando o Matlab,
clear all;close all;clc
% Planta contínua
num=1; % numerador
den=[conv([0 0 1],[1 2 0])]; % denominador % Transformando para matrizes de Estado
[A,B,C,D]=tf2ss(num,den)
% discretizando as matrizes
T=1;
[G,H]=c2d(A,B,T)
% voltando para TF discreta
[numd,dend]=ss2tf(G,H,C,D)
Observe que neste caso, as matrizes de estado não estão na forma canônica, mas o resultado em Função de Transferência deve ser exatamente o mesmo.
5.7 Exercícios Resolvidos
Exemplo 5.2: Para o sistema abaixo, converter para matrizes de estado discretas utilizando o Matlab,
10 s 6325 . 10 s 6325 . 1 s
2 s )
s ( G
2
3 + + +
+ =
clear all;close all;clc
% denifindo os dados da planta
T=0.1; num=[1 2];
den=conv([1 2*0.1*sqrt(10) 10],[1 1]);
% Funções de Transferencia
Gs=tf(num,den) % planta contínua
Gz=c2d(Gs,T) % planta discreta % Matrizes de Estado
MEs=ss(A,B,C,D) % empacotando
MEz=c2d(MEs,T) % Matrizes de estado discreta
Exemplo 5.3: Para uma suspensão ativa representando ¼ de veículo, escrever as matrizes de estado contínuas supondo que o distúrbio da via seja w(t).
Neste caso, as matrizes que regem o comportamento dinâmico do sistema são dadas por,
Massa Suspensa,
(
x x)
k(
x x)
u(t) cx
mS&&S + S &S− &N + S S− N =
Masssa Não-Suspensa,
(
x x)
k(
x x)
k x k w(t) u(t) cx
mN&&N + S &N −&S + S N − S + P N = P − Que na forma matricial fica,
⎭ ⎬ ⎫ ⎩
⎨ ⎧
− =
⎭ ⎬ ⎫ ⎩ ⎨ ⎧ ⎥ ⎦ ⎤ ⎢
⎣ ⎡
+ −
− +
⎭ ⎬ ⎫ ⎩ ⎨ ⎧ ⎥ ⎦ ⎤ ⎢
⎣ ⎡ −
− +
⎭ ⎬ ⎫ ⎩ ⎨ ⎧ ⎥ ⎦ ⎤ ⎢
⎣ ⎡
) t ( u ) t ( w k
) t ( u
x x
k k k
k k
x x
c c
c c
x x
m 0
0 m
p P
S
P S S
S S
P S
S S
S S
P S
N S
& & &
& & &
Este caso representa um sistema MIMO, duas entradas e duas saídas. Definindo as variáveis de estado iniciando pelos deslocamentos,
S 1 S
1 x x x
x = ⇒ & = & e x2 =xN ⇒ x&2 =x&N Para as velocidades,
S 1 3 x x
x = & =&& e x4 =x&2 =&x&N
Com as definições acima, as equações de estado são dadas por, 3
1 x x& =
4 2 x
x& =
(
)
(
)
S 2
1 S S 4 3 S S 3
m ) t ( u x x m
k x x m
c
x& =− − − − +
(
)
(
)
u(t)m 1 ) t ( w m
k x m
k x x m
k x x m
c x
N N
P 2 N P 1 2 N S 3 4 N S
4 =− − − − − + −
&
Que na forma matricial fica,
(
)
⎭⎬ ⎫ ⎩ ⎨ ⎧
⎥ ⎥ ⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢ ⎢ ⎢
⎣ ⎡
− +
⎪ ⎪ ⎭ ⎪ ⎪ ⎬ ⎫
⎪ ⎪ ⎩ ⎪ ⎪ ⎨ ⎧
⎥ ⎥ ⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢ ⎢ ⎢
⎣ ⎡
− +
−
− −
=
⎪ ⎪ ⎭ ⎪ ⎪ ⎬ ⎫
⎪ ⎪ ⎩ ⎪ ⎪ ⎨ ⎧
w u
m k m
1 0 m
1
0 0
0 0
x x x x
m c m
c m
k k m
k
m c m
c m
k m
k
1 0
0 0
0 1
0 0
x x x x
N P
N S
4 3 2 1
N S
N S
N P S
N S
S S
S S
S S
S S
4 3 2 1
& & & &
)} t ( F { )} t ( X ]{ K [ )} t ( X ]{ C [ )} t ( X ]{ M
[ && + & + =
Sendo que o vetor de estado,
{
}
⎭ ⎬ ⎫ ⎩ ⎨ ⎧ = ) t ( X ) t ( X ) t ( X &E as matrizes de estado,
{ }
{ }
{ }
UF ] M [ ] 0 [ X C ] M [ K ] M [ I ] 0 [
X 1 1 1 ⎥
⎦ ⎤ ⎢ ⎣ ⎡ + ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − − = − − − &
A resposta do sistema deve ser dado pelo que se deseja medir, supondo que seja necessário medir os deslocamentos e velocidades,
⎭ ⎬ ⎫ ⎩ ⎨ ⎧ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⎪ ⎪ ⎭ ⎪ ⎪ ⎬ ⎫ ⎪ ⎪ ⎩ ⎪ ⎪ ⎨ ⎧ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎪ ⎪ ⎭ ⎪ ⎪ ⎬ ⎫ ⎪ ⎪ ⎩ ⎪ ⎪ ⎨ ⎧ w u 0 0 0 0 0 0 0 0 x x x x 1 0 0 0 0 1 0 0 0 0 1 0 0 0 0 1 y y y y 4 3 2 1 4 3 2 1
Caso seje necessário medir apenas o deslocamento da massa suspensa,
{ }
[
]
[
]
⎭ ⎬ ⎫ ⎩ ⎨ ⎧ + ⎪ ⎪ ⎭ ⎪ ⎪ ⎬ ⎫ ⎪ ⎪ ⎩ ⎪ ⎪ ⎨ ⎧ = w u 0 0 x x x x 0 0 0 1 y 4 3 2 1 1Exemplo 5.4:Para o sistema abaixo, encontrar as matrizes de estado.
As equações de movimento na forma matricial são dadas por,
⎪ ⎭ ⎪ ⎬ ⎫ ⎪ ⎩ ⎪ ⎨ ⎧ + − + − + = ⎪ ⎭ ⎪ ⎬ ⎫ ⎪ ⎩ ⎪ ⎨ ⎧ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ + − − + − − + ⎪ ⎭ ⎪ ⎬ ⎫ ⎪ ⎩ ⎪ ⎨ ⎧ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ 3 3 3 2 2 2 1 1 3 2 1 3 2 3 3 2 1 2 2 1 3 2 1 3 2 1 u F u u F u u F x x x k k k 0 k k k k 0 k k x x x m 0 0 0 m 0 0 0 m & & & & & &
Portanto, as matrizes de estado podem ser dadas como,
⎪ ⎪ ⎪ ⎪ ⎭ ⎪⎪ ⎪ ⎪ ⎬ ⎫ ⎪ ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎪ ⎨ ⎧ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − + ⎪ ⎪ ⎪ ⎪ ⎭ ⎪⎪ ⎪ ⎪ ⎬ ⎫ ⎪ ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎪ ⎨ ⎧ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + − + − − = ⎪ ⎪ ⎪ ⎪ ⎭ ⎪⎪ ⎪ ⎪ ⎬ ⎫ ⎪ ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎪ ⎨ ⎧ 3 2 1 3 2 1 3 3 2 2 2 1 1 1 6 5 4 3 2 1 3 3 2 3 3 2 3 2 2 1 2 2 1 2 1 1 6 5 4 3 2 1 u u u F F F m 1 0 0 m 1 0 0 m 1 m 1 0 0 m 1 0 0 m 1 m 1 0 0 m
10 0 0 0 0 0