Dans le premier chapitre, une formulation variationnelle tridimensionnelle de la dynamique des structures autour de l'état d'équilibre statique de précontrainte est décrite. Dans ce chapitre, nous présentons une formulation variationnelle de la dynamique des structures autour d'un état d'équilibre statique précontraint.
Description du mouvement
En soustrayant les deux équations d’équilibre, nous obtenons l’équation d’équilibre dynamique concernant un état d’équilibre précontraint. Sous l’influence de contraintes externes statiques, la structure se déforme jusqu’à la configuration d’équilibre de précontrainte C0.

Tenseur gradient de déformation
Équations d’équilibre
Équation d’équilibre de l’état précontraint
Soit f0 le vecteur des forces de masse externes par rapport à C0.σ0 et f0 satisfait l'équation d'équilibre statique suivante basée sur la conservation de la quantité de mouvement.
Équation d’équilibre de l’état perturbé
Cette équation peut être exprimée de manière différente en introduisant les contraintes de Cauchy par rapport à la configuration perturbée C, définie par l'équation (1.5), et les contraintes de Piola-Kirchhoff mises à jour de seconde sorte S, définies par : e. où det0 définit les forces élémentaires de surface appliquées à la géométrie perturbée mais exprimées dans la configuration C0. La substitution de l'équation (1.20) par l'équation (1.15) nous permet d'écrire l'équation d'équilibre dynamique par rapport aux variables de configuration C0.
Équation d’équilibre dynamique autour de l’état précontraint
Pour étudier les oscillations de faible amplitude autour d'un état de précontrainte statique, nous travaillons sur l'hypothèse de petites perturbations dynamiques, ce que l'on appelle l'équation linéarisante (1.25). On obtient une équation d'équilibre dynamique linéarisée autour de l'état d'équilibre statique précontraint, caractérisée notamment par sa contrainte de Cauchy σ0.
Loi de comportement
Le premier terme de cette équation est linéarisé en négligeant les termes du second ordre (ie ∇0u avant I).
Formulation variationnelle
Principe des travaux virtuels
Conditions aux limites
Dans ce chapitre nous avons décrit la formulation variationnelle de la dynamique des structures autour d'un état d'équilibre statiquement précontraint. Le but de ce chapitre est d’écrire cette formulation variationnelle dans un système de coordonnées spirale.

Système de coordonnées curvilignes
- Paramétrage d’une hélice
- Base de Serret-Frenet
- Bases covariante et contravariante
- Symboles de Christoffel
Les composantes du tenseur métrique covariant sont définies par le produit des vecteurs de base covariants. Les coefficients du tenseur métrique contravariant sont définis par le produit scalaire des vecteurs de base contravariants comme suit.

Formulation variationnelle
- Vecteur des déplacements
- Tenseur gradient de déplacement
- Tenseur des déformations
- Loi de comportement
- Tenseur des précontraintes
- Formulation variationnelle dans la base de Serret-Frenet
D’après l’équation (2.23), le vecteur des déplacements s’écrit dans la base (en,eb,et) comme suit. En utilisant les transformations de l’équation (2.9), le tenseur du module élastique s’écrit dans la base (en,eb,et) comme suit.
Invariance par translation
Invariance géométrique
En substituant l'équation et (2.62) dans l'équation (2.22), la formulation variationnelle tridimensionnelle de la dynamique des structures hélicoïdales autour d'un état de précontrainte statique s'écrit comme suit : 2.63) L'apparition de la constante √g dans le volume d'intégration du la formulation variationnelle est due à l’écriture de l’élément de volume dans un système de coordonnées curvilignes.
Invariance matérielle
Invariance du système de coordonnées
Système de coordonnées tournant
Invariance pour un brin hélicoïdal seul
Puisque la base tournante est un cas particulier de la base hélicoïdale, alors le système de coordonnées tournant est nécessairement invariant. Par conséquent, une seule corde en spirale est invariante en translation dans le système de coordonnées de rotation.
Invariance pour une structure multi-brins hélicoïdale
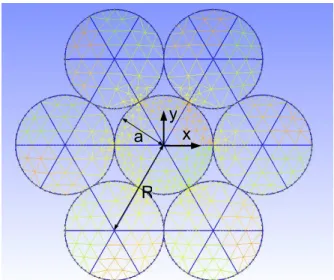
À un faible angle Φ, la section transversale est quasi-circulaire, lorsque la structure se rapproche d'un cylindre (Figure 2.3 a). La section s'éloigne de plus en plus de la section circulaire à mesure que Φ augmente. a).
Paramétrage de la section
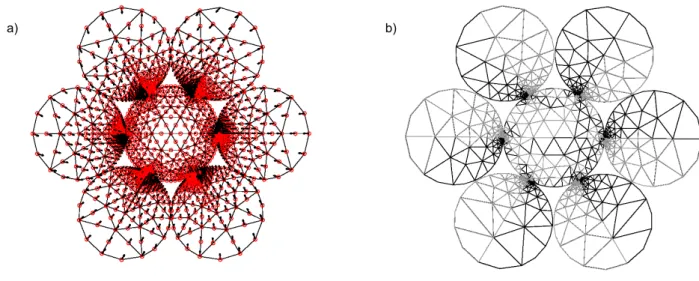
Nous pouvons conclure qu’une chaîne de sept chaînes est invariante en translation dans le système de coordonnées en rotation. Dans le système de coordonnées hélicoïdales, l'enveloppe de la section est circulaire de rayon a et est donnée par
Repères bibliographiques
Les différents opérateurs utilisés dans ces équations ont été écrits dans le système de coordonnées hélicoïdales du chapitre 2. Cette méthode, appelée homogénéisation hélicoïdale, qui s'appuie sur la méthode des développements asymptotiques et exploite la propriété d'invariance translationnelle dans le repère rotationnel, permet de réduire le problème à un problème 2D posé sur la section de la structure.
Homogénéisation hélicoïdale
- Le problème d’élasticité 3D initial
- Mise en oeuvre de la méthode des développements asymptotiques . 42
- Le problème macroscopique
- Bilan
- Cas d’une sollicitation macroscopique homogène
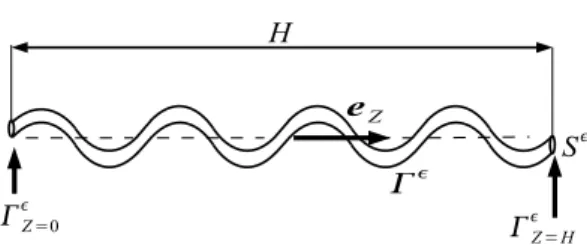
Dans ce travail, l'état de précontrainte résulte de l'application d'une tension sur les parties extrêmes de la structure. Nous introduisons ensuite le changement de variables suivant pour tenir compte de l’élancement de la structure. La solution macroscopique du 1er ordre (notée u1Z et ϕ1) semble être enrichie d'une solution microscopique (χE,χT) représentant la réponse locale de la section.
Formulation variationnelle
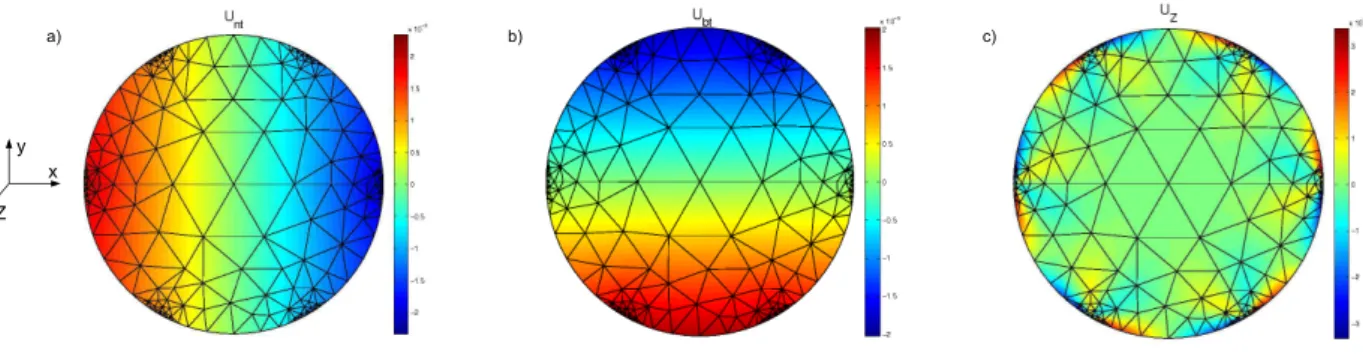
L'effet de la prédéformation sur la propagation des ondes élastiques guidées a été peu étudié dans la littérature. La figure 5.6 montre la variation de force non dimensionnelle résultante en fonction de la déformation axiale. 5.14 – Déplacements locaux de la section centrale d'une corde T15.7 soumise à une déformation axiale de 0,6 %.
Discrétisation par éléments finis
Résolution du problème microscopique
On peut citer les travaux de Farshad [1980], qui a étudié l'effet de la précontrainte sur la propagation des ondes élastiques dans les anneaux. Fig.5.15 – Déplacements locaux de la portion d'un toron périphérique hélicoïdal d'un toron T15.7 soumis à une déformation axiale != 0,6%. La figure 6.12 montre les courbes de dispersion, taux d'énergie en fonction de la fréquence.
Post-traitement : calcul des efforts et moments résultants
Repères bibliographiques
Méthodes numériques
L'idée de base est d'obtenir les modes de propagation d'une structure à partir des constantes de propagation d'une cellule élémentaire. A titre indicatif on peut citer les travaux pionniers de Mead [1973] pour les ondes élastiques ainsi qu'une revue sur le sujet du même auteur (Mead [1999]). Pour les structures à axe droit, on peut par exemple considérer les travaux de Ghoshal et al.
Guides courbes
Guides précontraints
Approche semi-analytique
Vecteurs des déformations et des composantes du tenseur gradient
Dans ce chapitre, nous présentons la formulation variationnelle semi-analytique éléments finis (SAFE en anglais, pour Semi-analytical Finite Element) d'une structure hélicoïdale soumise à une charge axiale pour déterminer ses modes de propagation. En substituant all∂/∂spar ik dans cette formulation, nous obtenons la formulation SAFE qui permet de déterminer les modes de propagation d'une structure hélicoïdale soumise à une charge axiale appliquée. Cette technique a été utilisée pour déterminer les modes de propagation dans des guides droits présentant des géométries ou des propriétés matérielles complexes.
Formulation SAFE
5.9 – Variation de la rigidité axiale et de l'élément d'accouplement sans dimension en fonction de l'angle d'hélice α pour R = 2a. La différence peut également s'expliquer par l'approximation elliptique de la section des brins périphériques, qui est considérée dans le modèle éléments finis 3D. Dans la suite de la section 6.1, les courbes de dispersion seront calculées à partir du modèle SAFE dans le référentiel rotationnel, mais présentées dans le référentiel hélicoïdal.
Dans cette thèse, nous avons étudié l'influence de la précontrainte sur la propagation des ondes élastiques dans les poutres vissées. La figure 6.8 illustre la superposition des courbes de dispersion, vitesse énergétique Ve/cs en fonction de la fréquence ωa/cs, de la chaîne T15.7 (courbes noires) et de sa chaîne centrale (courbes grises). La figure 6.9 (b) montre la variation du taux d'énergie en fonction de la fréquence de ces branches.
Le modèle de calcul statique a également été validé pour des torons à sept brins en comparant les résultats avec ceux d'un modèle éléments finis 3D de référence issu de la littérature.

Résolution par éléments finis
Calcul des paramètres modaux
- Définition des vitesses
- Expressions de E c , E p et P
- Calcul de la vitesse d’énergie
- Egalité entre vitesses de groupe et d’énergie
Pour les structures présentant un affaiblissement du matériau, c'est plutôt le taux d'énergie qui reste un paramètre modal significatif et non plus la vitesse de groupe (voir Bernard et al. [2001]). En revanche, l'expression du vecteur PoyntingPet de l'énergie potentielle Ep dépendra du biais appliqué. Dans cette section nous montrons que le taux d'énergie défini précédemment en présence de biais est bien égal à la vitesse de groupe donnée par l'équation (4.15).
Structures mono-brins
Modèles de référence
Nous commençons par présenter une validation du modèle éléments finis 2D pour les structures de type ressorts hélicoïdaux avec le modèle analytique d'Ancker et Goodier. Cet écart est dû à la non-validité du modèle analytique d'Ancker et Goodier pour R/low et high α. Cette limitation du modèle d'Ancker et Goodier est également mentionnée dans les travaux de Wahl [1963].
Validation
La figure 5.3 représente une superposition du coefficient Ψ3 calculé par le modèle éléments finis 2D et le modèle analytique d'Ancker et Goodier (équation (5.10)). Cependant, les résultats du modèle éléments finis 2D sont en bon accord avec les résultats du modèle analytique. Aucune hypothèse particulière n'est utilisée (hormis celle des petits déplacements), les modèles éléments finis 2D et 3D restent valables quels que soient les paramètres de l'hélice.

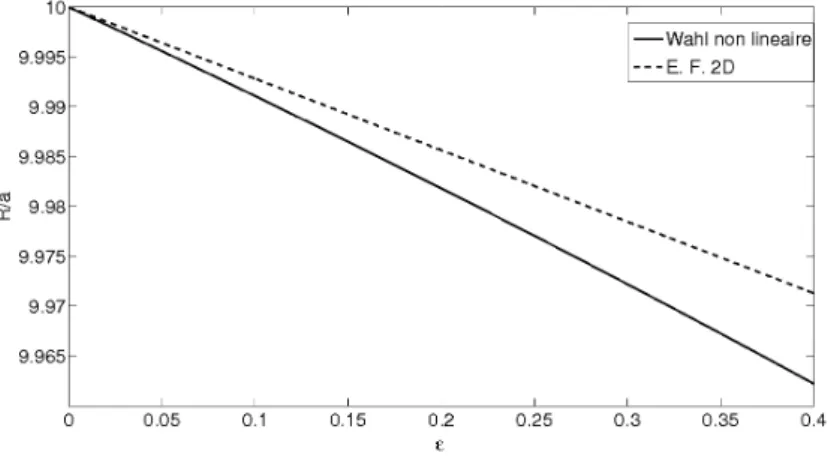
Limitation de l’hypothèse des petits déplacements
Ceci nous permet de dire que la géométrie déformée calculée à partir de la solution linéaire du modèle éléments finis est proche de celle calculée à partir du modèle non linéaire. L'écart entre les forces résultantes, calculées d'une part à partir du modèle éléments finis 2D, qui est linéaire, et d'autre part à partir du modèle Wahl non linéaire, reste relativement faible même pour une contrainte de traction axiale importante de 40 % ( moins de 6 %). En conclusion, la solution linéaire du modèle éléments finis 2D est relativement proche de la solution non linéaire.
Structures multi-brins
- Modèles de référence
- Validation
- Résultats pour un toron T15.7 (sept brins)
- Prise en compte simplifiée du contact
La détermination du comportement général des cordes à l'aide du modèle éléments finis 2D se fait de la manière suivante : une déformation axiale ǫ(ET = 0) est appliquée. 5.11 – Rigidité axiale adimensionnelle kǫǫ en fonction de l'angle d'hélice Φ La figure 5.11 présente l'évolution de la raideur axiale du fil à sept brins kǫǫ. L'avantage de la méthode présentée ici est qu'elle permet simplement de considérer le contact entre le brin central et les brins périphériques.

Guides mono-brins
- Modulation du nombre d’onde
- Modèle de référence avec précontrainte
- Validation avec précontrainte
- Effet de la réactualisation de la géométrie
Dans la suite de la section 6.1, les paramètres R et α seront donnés dans la configuration de référence non biaisée. Pour comparer les courbes de dispersion obtenues dans ces deux systèmes, une transformation du nombre d'onde et de la vitesse doit être effectuée pour les représenter dans le même référentiel. Dans les résultats présentés à la section 6.1.3, les effets de précharge et de déformations géométriques sont pris en compte.
![Fig. 6.1 – Courbes de dispersion pour ωa/c s ∈ [0; 0.25]. Guide d’onde hélicoïdal avec R = 10a, α = 15 ◦ , ǫ = 0](https://thumb-eu.123doks.com/thumbv2/1bibliocom/463146.68966/101.892.245.658.193.426/fig-courbes-dispersion-ωa-guide-onde-hélicoïdal-10a.webp)
Guides multi-brins
Repères bibliographiques
En comparant le taux d'énergie du premier mode de compression dans un brin à sept brins avec celui d'un cylindre, ces auteurs constatent l'existence d'une bande de fréquence dans le brin où le mode ne semble pas se propager. Pour voir l'effet de cette charge sur la propagation des ondes élastiques dans un toron à sept brins, des études expérimentales ont été réalisées. L'apparition d'une bande de fréquence dans laquelle le premier mode de compression ne se propage plus a été observée pour différents niveaux de charge de traction.
Résultats préliminaires sans chargement
La figure 6.9 (a) montre la variation de fréquence en fonction du nombre d'onde des branches inférieure et supérieure, respectivement notées 1 et 2. Son taux d'énergie tombe autour de la fréquence de coupure de la branche 2, proche de 0,35. Dans les tubes, le mode L(0,1) aux basses fréquences est le mode de type étirement (correspondant au mode S0 dans les plaques) ; son taux d'énergie chute autour de la fréquence de coupure du mode L(0,2).

Résultats avec précontrainte
Dans ces résultats, nous avons pris en compte la précontrainte et la déformation de la géométrie dans le contact linéaire entre les torons centraux et périphériques. Si l'on compare ces courbes de dispersion avec celles de la figure 6.12 obtenues en contact linéaire, on peut conclure que le décalage de la bande de fréquence est "manquant". 1998] montrent que la fréquence centrale de la bande « manquante » varie linéairement en fonction de Log(T), où T est la charge axiale appliquée.
6.17 – Variation de la fréquence centrale de la bande « manquante » en fonction de la charge appliquée à un toron sept brins de diamètre nominal égal à 12,7 mm et un toron multiconducteur (brin sept brins) soumis à un chargement axial. Pour la propagation des ondes élastiques dans un toron à sept brins, des résultats expérimentaux issus de la littérature ont montré l'existence d'une bande de fréquences "manquante" où le mode ayant la vitesse la plus rapide (type compression) semble ne plus se propager.

Équation d’équilibre dynamique autour de l’état précontraint . 11