La prédiction de la simulation numérique obtenue pour différents modèles d'alliages de titane sera comparée aux cartes de déformation obtenues par corrélation d'images sur des essais de mise en forme comme le gonflage. Dans cette partie, après une brève présentation générale des alliages de titane et des phénomènes physiques impliqués lors de la déformation plastique, nous nous concentrerons sur les alliages de titane commercialement purs.
Généralités sur les alliages de titane
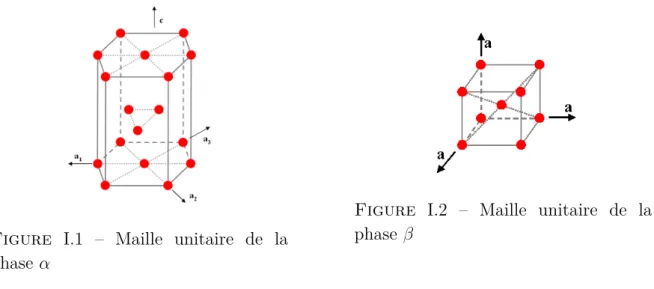
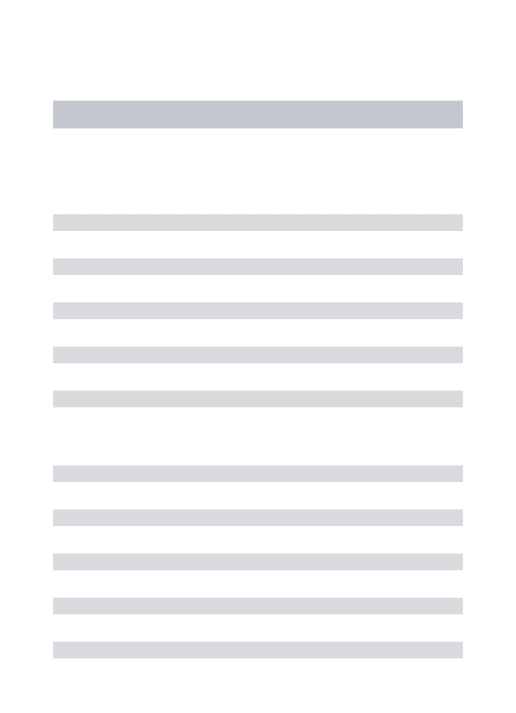
Bref aperçu des alliages de titane
La limite de température d'utilisation d'un alliage de titane est d'environ 600°C pour les alliages les plus résistants à la chaleur. La résistance à la corrosion des alliages de titane est bien connue, mais cette propriété ne découle pas du titane intrinsèque.
Les alliages de l’étude
On peut donc supposer que l'alliage est un alliage de type a et que la même modélisation peut être utilisée pour ces deux alliages de titane. Il s'agit d'un alliage de titane avec une limite élastique plus élevée (environ 397 MPa pour le sens de laminage et 423 MPa pour le sens transversal), mais légèrement moins ductile (allongement maximum de 15 %).
Les phénomènes de déformation des alliages de titane-α
Le plan de glissement principal étant un plan prismatique, le maclage va le favoriser en redistribuant l'orientation des structures hexagonales compactes, favorisant la colinéarité entre l'axe ~ cette direction de contrainte. L'apparition d'un jumeau secondaire chez un jumeau primaire s'observe si l'orientation de l'axe c du jumeau est dans une position instable.

De la microstructure à la modélisation numérique
La caractérisation des alliages de titane par des lois phénoménologiques a été réalisée principalement pour l'alliage TA6V, avec notamment une modélisation de la thermo-dépendance du comportement [Combres88] [Gavrus96]. En revanche, la caractérisation du comportement des alliages de titane commercialement purs est très peu abordée dans la littérature.
La modélisation macroscopique du comportement plastique
La modélisation de la surface de plasticité
Cependant, le nombre d'essais expérimentaux nécessaires pour identifier la plasticité de la surface doit rester raisonnable. ii) Le critère de Hu. Cependant, le nombre de paramètres nécessaires pour modéliser la surface de plasticité augmente avec le nombre de transformations.
![Figure I.21 – Évolution du module de Young en fonction de la direction de sol-licitation [int]](https://thumb-eu.123doks.com/thumbv2/1bibliocom/462683.68647/36.892.470.763.117.371/figure-évolution-module-young-fonction-direction-sol-licitation.webp)
Loi d’écrouissage cinématique
La forme générale régissant une loi cinématique d'écrouissage est fonction du tenseur cinématique [X], tenseur représentatif de la translation de la surface de charge, qui modifie le critère de plasticité selon l'expression suivante. La récupération statique pour la formation à haute température en ajoutant un terme fonction de la température τ(T) (équation I.39) peut également affiner la description de la cinématique d'écrouissage.
![Figure I.31 – Effet du tenseur d’écrouissage cinématique [X] sur la surface de plasticité](https://thumb-eu.123doks.com/thumbv2/1bibliocom/462683.68647/49.892.171.736.217.493/figure-31-effet-tenseur-écrouissage-cinématique-surface-plasticité.webp)
Loi d’écrouissage isotrope
La loi Nemat-Nasser [Nemat-Nasser99] permet la modélisation d'un alliage de titane commercialement pur en tenant compte des mécanismes microstructuraux et de la température. Il est donc nécessaire de déterminer les deux paramètres matériau r et n, permettant de modéliser la recristallisation dynamique lors de la déformation plastique des alliages de titane.

Loi de comportement à variable interne
L'équation I.52 permet de relier la limite d'élasticité plastique σy à une variable interne ρ, la valeur moyenne de la densité de dislocations dans la microstructure. Il existe d'autres fonctions qui déterminent l'évolution de la densité des dislocationsρ, notamment une forme différentielle établie par Klepaczko [Houillon09].
Conclusion du chapitre
Relations de base
Le changement de forme est défini par le tenseur de déformation pure droite [U] ou gauche [V] selon que la transformation est considérée comme constituée d'une rotation [R], puis d'une déformation [V], ou d'abord d'une déformation [U] puis une rotation [R] (Fig. II.1). Dans la suite, nous utiliserons le tenseur de déformation même pur [U] pour établir les relations reliant la transformation et le tenseur de vitesse de déformation.
![Figure II.1 – Décomposition polaire d’une transformation, par l’intermédiaire d’une matrice de rotation rigide [R], et d’un tenseur de déformation pure droit [U] ou gauche [V]](https://thumb-eu.123doks.com/thumbv2/1bibliocom/462683.68647/62.892.209.664.116.372/figure-décomposition-polaire-transformation-intermédiaire-matrice-rotation-déformation.webp)
Décomposition élasto-plastique
La seule information requise est le tenseur du gradient de transformation [F] afin de déterminer la formulation du milieu continu anisotrope.
Le suivi de la transformation élasto-plastique
Dans ce référentiel, les axes d'anisotropie restent perpendiculaires deux à deux, à chaque instant de la transformation. Suite à la transformation par la transformation de Jaumann préserve l'orthogonalité du système de coordonnées des axes d'anisotropie.
L’environnement du modèle continu anisotrope
Hypothèses générales
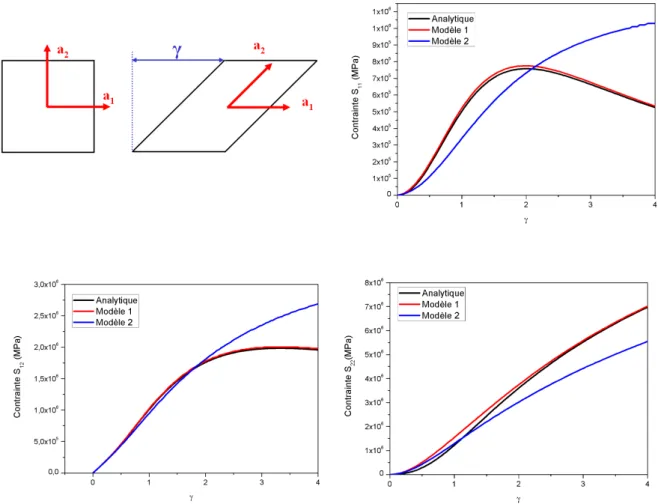
La figure II.6 permet d'illustrer la réactualisation des axes d'anisotropie lors de la transformation de type cisaillement simple. Avec une réactualisation des axes d'anisotropie à travers le gradient de la transformation [F], on ne peut plus cacher cette propriété des tenseurs.
Spécificité de la formulation anisotrope
L’objectivité de la formulation
Les contraintes calculées seront retransférées au référentiel pour résoudre les équations d'équilibre. Ainsi, on observe les différences entre les calculs analytiques et les résultats numériques issus du modèle 2, dans lequel la loi de comportement est transférée à l'étiquette de référence.

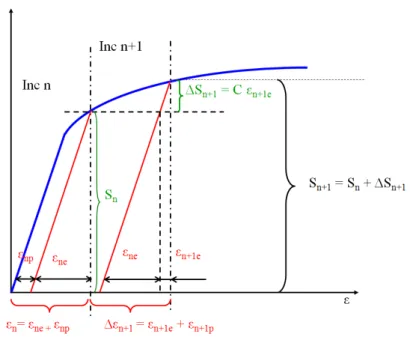
La gestion incrémentale de la formulation
En appliquant cette méthode pour le transport des contraintes entre deux étapes de calcul, l'état de plasticité dans le matériau est différent, du fait de l'utilisation de . la base de référence euclidienne pour stocker le déviateur de contrainte. En revanche, cela implique le stockage de l'écart aux contraintes dans la base locale entre chaque étape.
Conclusion du chapitre
Le chapitre suivant est consacré à l'implémentation de la formulation et du modèle mécanique dans un logiciel éléments finis. L'implémentation du modèle dans des logiciels de calcul est spécifique à cela car elle dépend fortement de la formulation et des éléments finis utilisés.
Implémentation d’un modèle de comportement mécanique
- Mise en place de la formulation incrémentale
- Le calcul de l’incrément de contrainte
- Les modules tangents linéaire et bulle
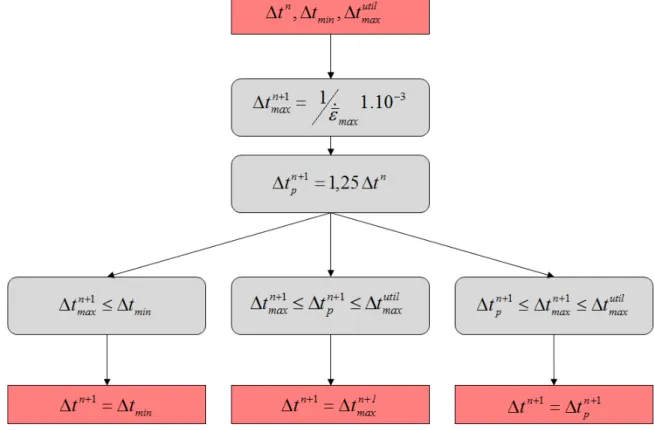
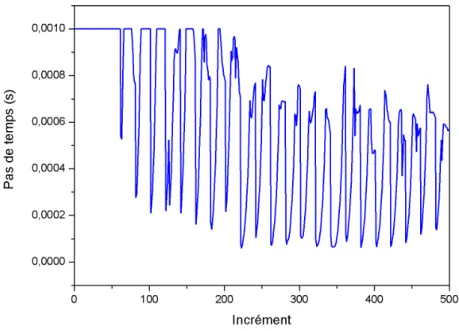
- Pas de temps adaptatif
L'expression du module tangent de la bulle est directement dérivée de l'expression de la contrainte de la bulle (équation III.38). Pendant la simulation, un pas de temps maximum pour l'incrément actuel est déterminé à partir de la vitesse de déformation plastique.
Calcul de l’incrément de contraintes pour le critère de Hill
Le calcul des modules tangents est également direct en intégrant les dérivées du critère de Hill. L'intégration d'un critère de Hill dans les logiciels éléments finis est classique et l'application de l'algorithme de rétroaction radiale est suffisante.
Implémentation du critère de Cazacu
Calcul des contraintes principales d’un tenseur
Le calcul des contraintes principales du tenseur [S] est nécessaire pour déterminer la valeur du critère de plasticité. De plus, le calcul des dérivées du critère de plasticité est facilité par l'utilisation des invariants du déviateur.
Calcul de l’incrément de contrainte
Dans ce cas, contrairement au critère de Hill, on ne peut pas exprimer la norme à la surface de plasticité en fonction des composantes du déviateur de la contrainte. Avec la nouvelle valeur de ce paramètre, on calcule la correction de l'incrément de tension ∆S.
Calcul des dérivées du critère de Cazacu
Pour obtenir la valeur de la dérivée seconde du critère de Cazacu, un schéma numérique centré est utilisé. La dérivée première du critère de Cazacu est donc calculée pour ces deux états de tension.
Gestion de l’écrouissage isotrope
Intégration de la loi adoucissante
Le deuxième critère mis en œuvre est le critère non quadratique de Cazacu, qui nécessite des développements mathématiques. et le déviateur correspondant, est utilisé dans l'intégration du critère de Cazacu. Toutes les étapes liées au calcul de la dérivée du critère de Cazacu sont décrites ci-dessus.
Intégration de la dépendance au chargement pour l’écrouissage
Intégrer l'écrouissage isotrope en fonction de la direction de la contrainte revient à calculer les dérivées de celle-ci par rapport au taux de déformation plastique équivalent et à la déformation plastique équivalente. La détermination de l'angle θ, qui représente la direction de contrainte par rapport à l'axe 1 de l'anisotropie, est réalisée à partir des vitesses nodales.
Validation de l’implémentation de la formulation anisotrope sous Forge R 106
Emboutissage d’une boite carrée
Ce cas de test permettra entre autres de vérifier le calcul de l'épaisseur de la tôle lors du formage. En utilisant la définition de la déformation logarithmique, on peut revenir à l'épaisseur de tôle h.
Emboutissage d’un godet cylindrique anisotrope dont l’anisotro-
Profil de la géométrie finale et notamment l'orientation des cames du tampon et des plis sous le conteneur vide (Fig. III.19). L'épaisseur est maximale pour une orientation à 45° du sens de laminage et minimale pour le sens transversal.

Emboutissage retour d’un godet cylindrique
Les champs de déformation plastique sont dessinés à la fin de la première passe (Figure III.29) et du procédé (Figure III.30). Figure III.30 - Déformation plastique en fin de deuxième passe : Comparaison entre les résultats numériques de [Thuillier10] et ForgeR (à droite).
![Figure III.29 – Déformation plastique à la fin de la première passe : Comparaison entre les résultats numérique issus de [Thuillier10] et de Forge R (à droite)](https://thumb-eu.123doks.com/thumbv2/1bibliocom/462683.68647/127.892.140.720.218.429/figure-déformation-plastique-première-comparaison-résultats-numérique-thuillier10.webp)
Conclusion du chapitre
Essais de traction uniaxiale
Le graphique IV.8 représente les coefficients de Lankford en fonction de l'angle de contrainte par rapport à la direction du roulis. Direction Limites d'élasticité (MPa) Contrainte à la rupture (MPa) .. Tableau IV.4 – Limites d'élasticité et contraintes à la rupture pour l'alliage SSAT 350 emphiii) Mesure des coefficients de Lankford par mesure de champ Les coefficients de Lankford sont déterminés par la méthode de corrélation d'images.

Test de cisaillement simple
De plus, l'alliage biphasé SSAT350 permet une ductilité très différente selon l'orientation de la contrainte. Une comparaison des profils de rupture des éprouvettes de traction permet d'observer l'apparition d'une striction importante dans le cadre de l'alliage T40, versus une striction quasi inexistante pour l'alliage SSAT350.
![Table IV.6 – Limites élastique pour l’essai de cisaillement du T40 [Mhenni]](https://thumb-eu.123doks.com/thumbv2/1bibliocom/462683.68647/141.892.312.603.153.274/table-iv-limites-élastique-essai-cisaillement-t40-mhenni.webp)
Test de compression
Identification des paramètres du matériau
Identification du critère de plasticité
La stratégie d'identification du critère de plasticité D permet de prendre en compte l'évolution géométrique provoquée par l'anisotropie. L'introduction de la prise en compte des coefficients de Lankford dans l'identification des surfaces de charge (Hill - B et Cazacu - D) permet une meilleure modélisation de la surface de plasticité.
Identification des lois d’écrouissage
Figure IV.26 – Comparaison entre le calcul numérique et les données expérimentales de la courbe contrainte-déformation obtenue dans le sens du laminage : Modélisation de l'écrouissage isotrope par une loi de Norton-Hoff. Figure IV.29 – Comparaison entre le calcul numérique et les données expérimentales de la courbe contrainte-déformation obtenue dans le sens du laminage : Modélisation de l'écrouissage isotrope par une loi d'adoucissement.

Comparaisons numériques entre les différentes procédures d’identifications161
Le tableau IV.25 donne un aperçu des différentes largeurs mesurées selon le critère de plasticité et la stratégie d'identification utilisée. La stratégie d'identification du critère de Hill A n'est pas testée sur les essais de cisaillement.

La mise en forme à froid de l’alliage SSAT350
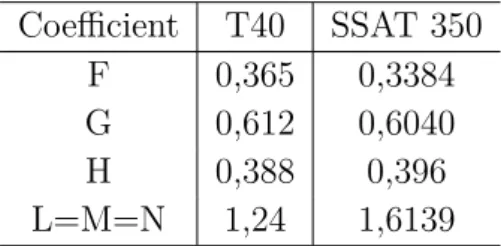
Le but de cette étude est de simuler la mise en forme à froid d'alliages de titane. Ainsi, pour le critère de plasticité, on retient le critère de Hill identifié sur les coefficients de Lankford et deux jeux de paramètres pour le critère de Cazacu, le premier déterminé à partir des limites élastiques et des valeurs des coefficients de Lankford en traction ; l'autre en additionnant les résultats observables obtenus en cisaillement et en compression.
Gonflage des alliages de titane
- Essai de gonflage d’alliage de titane
- Modélisation analytique de l’essai de gonflage hémisphérique
- Simulation de l’essai de gonflage hémisphérique
- Simulation de l’essai de gonflage elliptique
- La modélisation des alliages de titane pour le gonflage
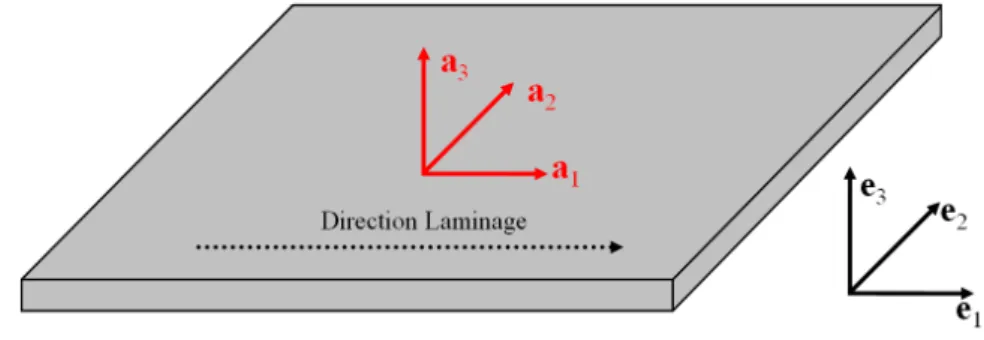
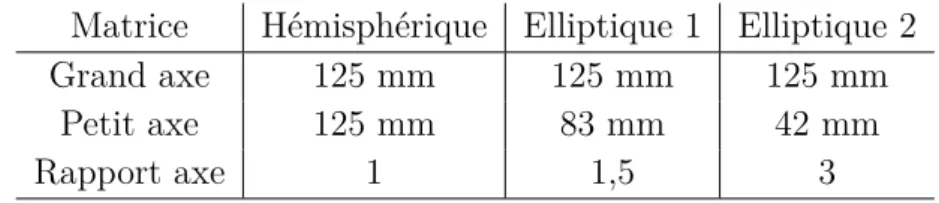
Figure V.3 – Placement de la plaque dans l'insert elliptique selon le sens de roulement. Le comportement anisotrope peut être observé dans le test de gonflement elliptique, en fonction de la position de départ de la tôle.
Emboutissage des alliages de titane
Emboutissage d’un godet cylindrique
Emboutisssage d’une pièce axisymmétrique
Conclusion du chapitre
L'anisotropie de l'alliage T40 permet donc d'obtenir différents profils de rupture indépendamment de la vitesse de déformation. Le test de gonflage hémisphérique est simulé numériquement, pour permettre une première comparaison de l'efficacité de modélisation de l'alliage de titane T40.
Orientation initiale à 45/135˚
Lois d’écrouissage

![Figure I.28 – Comparaison des différents critères pour le matériau AA2090-T3 [Mattiasson08]](https://thumb-eu.123doks.com/thumbv2/1bibliocom/462683.68647/46.892.172.695.118.754/figure-28-comparaison-critères-matériau-aa2090-t3-mattiasson08.webp)