Abstract: This paper presents and experiments with approaches to solve a novel bi-objective routing problem called the ring star problem. To tackle the bi-objective ring star problem, we first investigate different independent search methods. We experiment with the resulting search methods on the bi-objective RSP, and we compare the obtained computational results with the previous ones.
Multi-objective Optimization
Problem Definition
Related Works
In [35], the same authors investigated the second formulation of the problem using a very careful method. Finally, one or both versions of the problem were solved heuristically by a variable neighborhood tabu search [44], an evolutionary algorithm [47], a multi-start greedy add heuristic [47], and a variable neighborhood tabu search hybridized with a greedy random adaptive search procedure [15]. Another variant of the RSP is the Steiner Ring Star Problem, where only optional nodes can be visited [38].
Industrial Interests
In fact, as proposed in [56], it is assumed that the optimization objective is given in the form of a binary quality indicatorI [58], which can be considered as an extension of the Pareto dominance relation. As noted in [56], R need not be known, it is merely required in the formalization of the optimization objective. One of the main advantages of indicator-based optimization is that no specific diversity conservation mechanism is generally required, depending on the indicator used.
Multi-objective Evolutionary Algorithms
IBEA
However, initial experiments were not satisfactory because the algorithm was unable to find the extreme points of the exchange surface. Indeed, the authors illustrate that one of the limitations of ǫ dominance is that the extreme points of the Pareto front are usually lost. If the size of the archive is less than N, the population is filled with random solutions.
NSGA-II
SEEA
Application to the Ring Star Problem
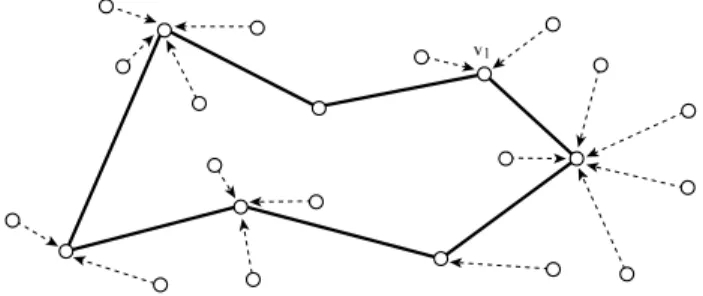
- Solution Encoding
- Population Initialization
- Neighborhood and Mutation Operators
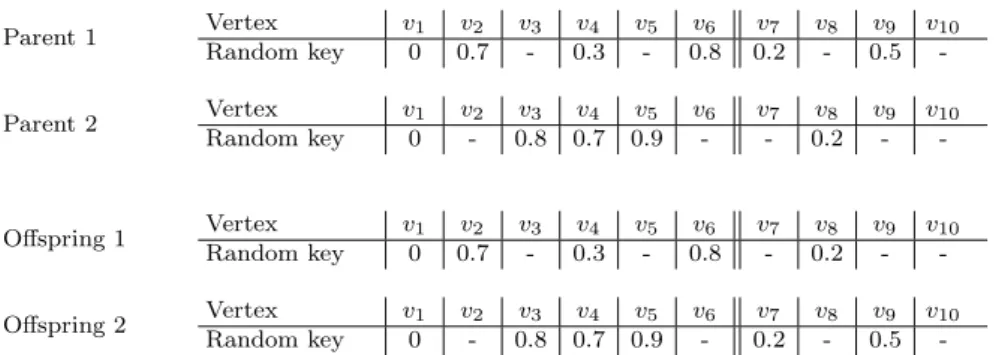
- Crossover Operator
After a remote operator, we just need to reassign the nodes that were previously assigned to the one that has been removed. Thanks to the random key encoding mechanism, solutions with a different ring size can be easily combined, although the original ring structures are generally broken in the offspring solutions. Another crossover operator that preserves a larger part of the initial ring structures has been experimented, but it tended to reduce the number of nodes belonging to the cycle and then caused a premature convergence with solutions with a small number of visited nodes .
Experiments
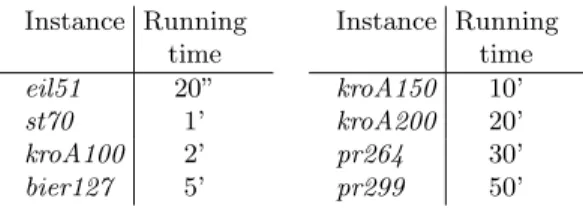
- Experimental Protocol
- Local Search Parameter Analysis
- Evolutionary Algorithms Parameter Analysis
- Comparison between Search Methods
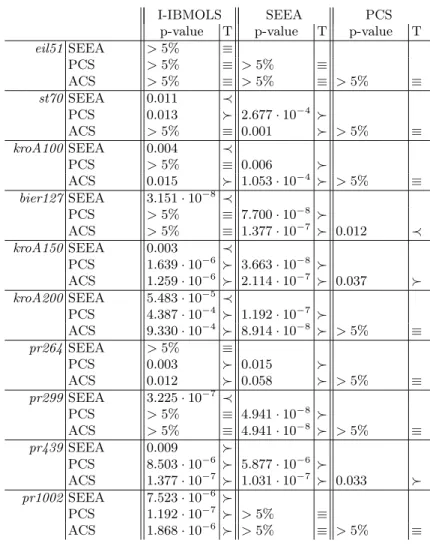
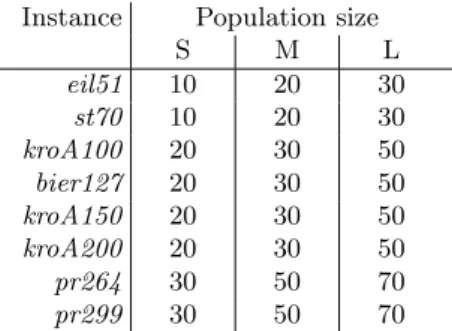
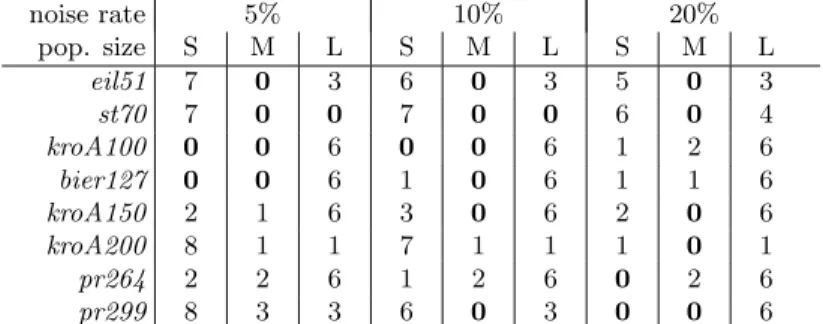
Therefore, for a specific test instance, and according to the p-value and metric under consideration, this statistical test reveals whether the sample of proxy sets obtained by an M1 search method is significantly better than the sample of proxy sets obtained by a search M2 , or if there is no significant difference between the two. For the IBMOLS algorithm, we set the population size according to the number of vertices included in the sample (see Table 2). Likewise, the population restart noise level in the iterative version of IBMOLS (denoted I-IBMOLS) is set to a fixed percentage of the sample size.
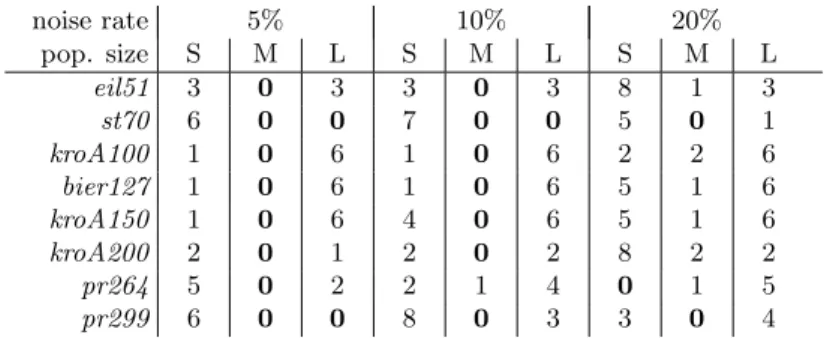
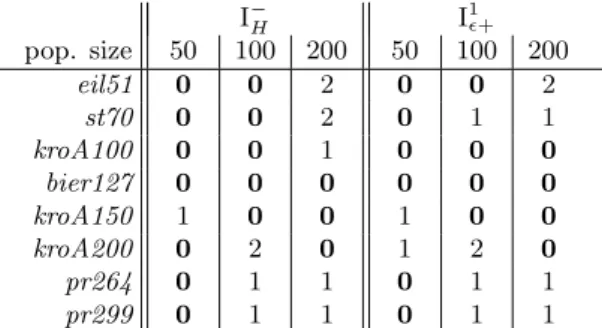
According to the I−H metric, the population mean size with 5% or 10% random noise appears to perform well on every test case, except for the pr264 case, where the population mean size and 10% random noise perform significantly worse than the other parameterization. Furthermore, as shown in Table 4 , the population mean size with random noise parameterized at 10% appears to perform slightly better overall than with random noise of 5% with respect to the I1ǫ+ metric. Then, for all other cases, we choose to set the number of individuals in the population to medium size and the noise level to 10% to compare I-IBMOLS with other metaheuristics.
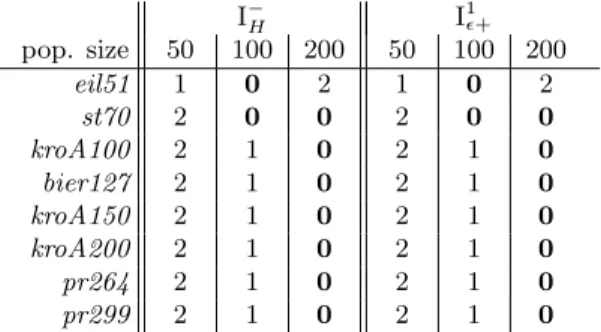
The value of all the parameters used by I-IBMOLS for the rest of the paper are summarized in Table 8. Regarding the I−H metric, we can see that I-IBMOLS is never outperformed by any other search method for all the cases we tested. Furthermore, by the same measure, SEEA appears to be generally more efficient than IBEA and NSGA-II.
Moreover, the results of NSGA-II are always worse than those of the other methods for all the cases. Such a result appears to be mainly due to the discontinuity of the trade-off surface, for which a good approximation is given in Figure 9. Since the same ranking is assigned to the largest part of the population, only the displacement distance is used to compare solutions.
Cooperative Schemes
They usually consist of one research method cooperating with a second one to improve a solution or set of solutions. In the previous section, we saw that SEEA and I-IBMOLS were generally more efficient than NSGA-II and IBEA in approximating the efficient set for the problem under consideration. Furthermore, these two methods are quite different from each other and do not explore the search space in the same way.
SEEA is designed to find a rough approximation of the Pareto set in a very short time, while the non-iterative version of IBMOLS can improve an approximate set in a very efficient way. Furthermore, both methods maintain a secondary population (the archive) in parallel with the main population to store non-dominated solutions. Each method can therefore manage its own population and therefore use the archive as one shared memory.
If S⋆ denotes the set of non-dominated solutions given by S1∪S2, the contribution of S1 on S2 evaluates the proportion of non-dominated solutions represented by S1 in S⋆. In our case, at each step t of the ACS, we calculate the contribution of the current archiveAt to the archive of the previous stepAt−1. Thus, since nondominated solutions are not lost between two steps, At is at least as good as At+1 and the set of nondominated solutions of At∪At−1 is thenAt.
Assuming that the archive does not improve sufficiently if the contribution iAt onAt−1 is less than a predefined threshold δ∈[0.5,1], we choose to run IBMOLS only ifC(At, At−1)≤δ.
Related Works
Let us note that an ACS with aδ= 0.5 will lead to SEEA, and that an ACS with aδ= 1.0 will result in PCS, the time spent calculating the different contribution values in less. In their survey on hybrid metaheuristics to solve multi-objective combinatorial optimization problems [18], Ehrgott and Gandibleux identify three categories of methods that hybridize an EA with a neighborhood search algorithm: (i) a hybridization to make a method more aggressive , (ii) a hybridization to drive a method and (iii) a hybridization to exploit complementary strengths. The last one consists of alternating between both search methods, which is the case within our hybridization.
Several of the teamwork hybridization techniques in the literature for solving MOPs most often consist of the same type of metaheuristics, which is generally the case of the island model. In addition, this class of hybrid methods often uses a neighborhood search method that combines a set of scalarization functions. The originality of the approach proposed in this paper is that the search agents are based on different types of metaheuristics, are hybridized in a teamwork mode, and do not use any scalar approach to convert multiple objective functions into a single one.
Furthermore, one of the variants we propose, the auto-adaptive one, automatically detects when to start the neighborhood search according to the optimization scenario.
Experiments
Parameter Setting
Computational Results and Discussion
In general, these figures graphically confirm the superiority of the cooperative search methods for test instances with a high number of nodes. This can be explained by the fact that (i) IBMOLS spends more time finding non-dominated solutions by starting with a poorer quality population, which is the case in PCS compared to ACS (at least in the first run) , and ( ii ) part of the runtime allocated to the algorithm is used to calculate a contribution value at each step of ACS, whereas PCS devotes its entire runtime to the search process. As a final step, we provide a comparison between the results found for the bi-objective version of the RSP proposed in this paper and those of the mono-objective RSP studied in [34] , where both costs are summarized.
In [34], the authors propose an exact method to solve a single-objective RSP that aims to minimize the sum of the ring cost and of the assignment cost. To summarize, compared to single-objective optimal or near-optimal results, the search methods we proposed in this paper to solve the B-RSP are quite promising with respect to the relatively small computational time available and the size of the problem cases to be solved. Then, two state-of-the-art multi-objective evolutionary algorithms, namely IBEA [56] and NSGA-II [14], as well as a third one, the simple elitist evolutionary algorithm (SEEA), here proposed for the first time, are all equipped for the specific case of the bi-objective ring star problem to be solved.
This can be explained by the fact that ACS spends time calculating whether cooperation should occur at a given step of the algorithm. Although the approaches proposed in this paper are already promising, some future research directions are open even compared to the mono-objective approaches in the literature. Then, as proposed in [47], the same heuristics could be used to improve the ring cost of the newly generated solutions.
Note that the last two points could significantly improve the efficiency of the evolutionary algorithms compared to the local search method, which would also be beneficial for the hybrid methods. InProceedings of the 13th International Conference on Multiple Criteria Decision Making (MCDM 1997), Cape Town, South Africa, 1997. Grefensette, editor, Proceedings of the 1st International Conference on Genetic Algorithms (ICGA 1985), pages 93–100, Pittsburgh, PA , USA, 1985.