Le code Discrete Viscous Rods a été principalement écrit par Basile Audoly et Nicolas Clauvelin, et je n'ai été que marginalement impliqué dans son développement (prise en compte attentive de la gestion des conditions aux limites et du maillage adaptatif - voir chapitre 2). Ces derniers aspects ont permis de valider exactement le code que j'ai réalisé (notamment l'étude de convergence - Chapitre 3), mais aussi et surtout la simulation "machine à coudre fluide" (Chapitre 4).
Des objets du quotidien
Leur formation est le résultat d’une combinaison thermique avec une rhéologie complexe et la dynamique des filaments étudiés ici. Ils s'apparentent à bien des égards à certaines applications technologiques utilisant les instabilités de filaments visqueux.

Des enjeux technologiques
La maîtrise de la dynamique des filaments est essentielle dans tous les domaines de l'impression 3D, artistique, électronique et biologique/biomédicale.(6) DysneyTM Tangled utilise la dynamique des tiges élastiques. Pour en arriver là, la moindre instabilité doit être évitée à tout prix, et la connaissance de la dynamique des filaments est essentielle pour l’optimisation des procédés.
Des objets fins mais complexes
Dans un tel procédé, des milliers de filaments de polymère liquide (T > Tg où Tg est la température de transition vitreuse) sont extrudés et s'écoulent vers un tapis roulant (fig1.2-1b). Enfin, nous donnons l'exemple d'un domaine où la prédiction de cette dynamique exacte ou approchée est un but en soi : c'est le domaine des effets spéciaux [5].
Élastique ou visqueux : la géométrie est au cœur du problème
Cinématique
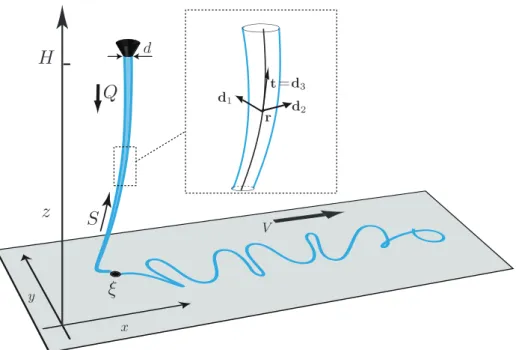
A tout instant t on détermine avec x(S, t) la position de la ligne centrale de la tige (figure 2.1). Cette équation nous permet d'exprimer la dérivée temporelle de la tangente en fonction de la géométrie et de la vitesse de l'axe.
Incompressibilité du fluide
Repère matériel et conséquences
Le vecteur Darboux associé à la dérivée temporelle du référentiel matériel est le vecteur vitesse de rotation noté ω défini implicitement par . Comme déjà mentionné, il existe un lien entre l'évolution temporelle de la courbe centrale et les rotations de la référence matérielle.
Construction des potentiels de dissipation visqueux
Taux de déformation
Notez qu'en élasticité on mesure la déformation par τ et K, alors qu'avec les fluides visqueux il existe une dérivée plus (entraînée). On rappelle ici que la description de l'étirement de la tige est plus simple : (cf.
Lien entre déplacement x(S,t) et torsion
D'un point de vue pratique, il semble que l'on puisse paramétrer la tige avec les principales variables position x (S, t) et la vitesse de rotation scalaire v (S, t) et ainsi construire le taux de déformation en torsion en combinant les relations K = t×t� et t = x� . Plus important encore, l'équation (2.30) montre la relation entre le déplacement de l'axe central et la torsion.
Proposition de potentiels de Rayleigh
Les notations S− et S+ identifient les coordonnées lagrangiennes des bords de la barre, qui peuvent dépendre du temps. Cette équation permet de placer les équations de dynamique des déformations sous forme variationnelle.
Équation de la dynamique pour les filaments visqueux
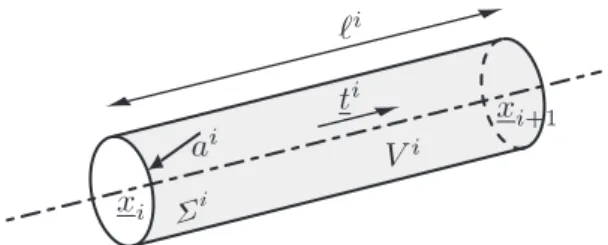
Notez que les quantités en indices sont basées sur les sommets, tandis que celles avec exposants sont basées sur les segments.
Aspects discrets du code numérique
- Discrétisation
- Potentiels de dissipation discrets
- Fonctionnement général
- Conditions aux limites
- Maillage adaptatif
Comme dans le cas continu, nous définissons le rayon de la tige et l'aire correspondante parai(t) et Ai(t). La section suivante traite de la détermination des conditions préalables mentionnées ci-dessus.
Conclusion
Équations de Kirchhoff pour les filaments visqueuses
On élimine donc à la fois la rugosité artificielle de la surface et le retard dans la transmission retardée de l'impulsion signalé précédemment. De ce fait, nous maillons le haut du flux de manière extrêmement fine (inutilement) dans l’espoir d’arriver au bas du flux avec une définition suffisante.

Code DVR (Discrete Visoucs Rods)
Il est alors possible de déterminer le seuil et la fréquence de ces instabilités (Cruickshank [36]. Ces travaux ont permis de prédire les valeurs du rayon du méandre ainsi que sa fréquence en fonction de la hauteur de chute. Grâce à ces leçons, ils ont pu prédire presque exactement la fréquence d'enroulement en fonction de la hauteur en utilisant une formulation analytique approximative et concluante pour les filaments extrêmement étirés.
Enroulements stationnaires dans un repère tournant
Équations de l’écoulement
Deux régions émergent, la pointe de la spirale (queue) et la spirale en aval. Queue : c'est la partie supérieure de l'écoulement qui est presque rectiligne et où l'extension est importante, c'est-à-dire que le rayon diminue au profit de la vitesse qui augmente avec la conservation de la masse. La zone des méandres : c'est la partie basse du ruisseau qui présente une morphologie très différente.

Approche par continuation
Sans perte de généralité, on peut décrire la position du marqueur matière au point de contact (ce qui revient à laisser son orientation libre à l'injecteur).
Approche tout numérique - Discrete Viscous Rods
Convergence du code
Nous étudions ici empiriquement la convergence du code par rapport à la solution de référence calculée par AUTO. En présence de collisions mono-surfaces, nous avons constaté que la convergence n'était pas anodine et nécessitait un traitement particulier et raffiné du contact et de l'injection (§ 2.4.4). La simulation destinée à étudier la convergence est la suivante : on choisit une certaine hauteur de chute et on attend l'établissement d'un état d'enroulement régulier dont on mesure ensuite le rayon R.
Validation de la tension de surface tension
Discussion
Une succession de régimes différents
Ainsi, l'équation de Kirchhof (3.7) permet d'estimer les efforts visqueux résultant de la flexion et de la torsion. Blount et Lister [40] ont apporté une correction à cette formulation en prenant en compte les effets de la partie supérieure. Ce mode est particulièrement intéressant et est détaillé à la fin de la section suivante en 3.4.2.

Morphologie de l’écoulement
Les points de rebroussement de la courbe Ωc( ˜H) (Figure 3.2) peuvent alors être interprétés comme les modes naturels de la partie supérieure de l'écoulement. Le raisonnement analogique fonctionne en considérant la tension de la partie supérieure et en décrivant la force exercée par la partie inférieure. Conséquence directe de ce qui a été dit ci-dessus, on comprend que l'aspect visuel de la partie supérieure peut être le reflet des modes propres évoqués ci-dessus.

Conclusion : Sauts de branches - régimes transitoires
The position of the contact point between the thread and the tape is given by the complex number ξ(t)≡x(t)+i y(t). The parts of the curves corresponding to gravity (G), inertia-gravity (IG) and inertia (I) regimes are indicated. The weight of the wire and the surface tension are taken into account when setting.
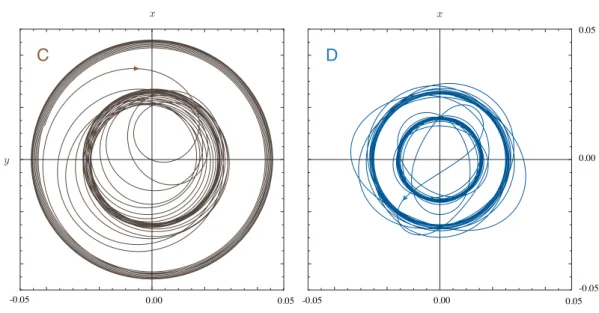
We performed a Fourier analysis of the motion ξ(t) in a sliding window of 2000 time steps, calculating the spectrum every 500 steps with a fast Fourier transform (FFT). The frequencies of the transverse (y-direction) and longitudinal (x-direction) movement of the contact point are shown by large dots (blue) and small dots (red), respectively.
Étude expérimentale
Mise en place
Ce type de torsion peut également être induit artificiellement, par exemple en projetant une lumière polarisée sur des films de polymères photosensibles conçus pour remplir cette fonction [52]. On passe de l'échelle centrimétrique avec ces plantes, qui sont des tiges qui vivent dans l'atmosphère du milieu, à l'échelle micrométrique, dans le sang avec les globules rouges, qui sont des coquilles. Ce type de problème se prête directement au domaine de la dynamique des tiges.
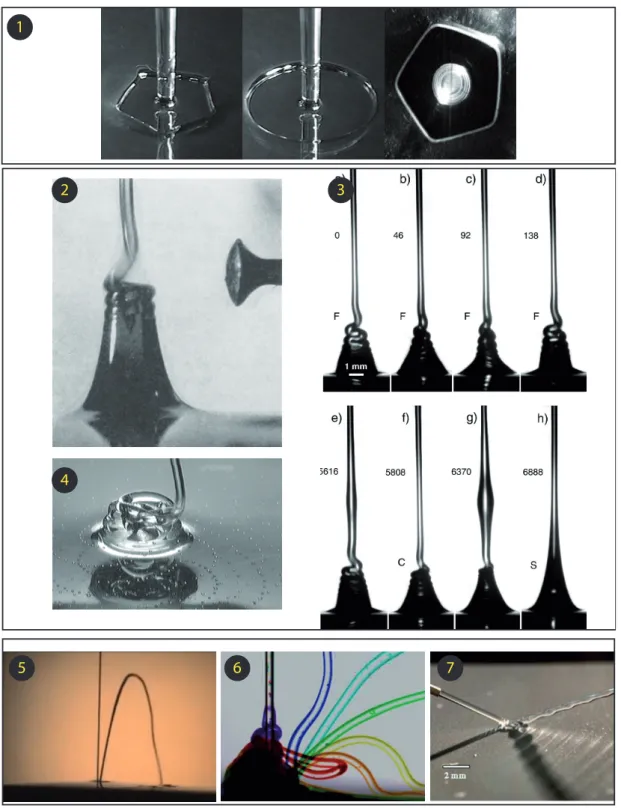
![Figure 5.1 – Exemples de repliement élastiques. (1) Bryonia Dioica d’après [49]. (2) Globules rouges après leur lyse [50]](https://thumb-eu.123doks.com/thumbv2/1bibliocom/463137.68961/95.892.200.624.288.872/figure-exemples-repliement-élastiques-bryonia-dioica-globules-rouges.webp)
Résultats
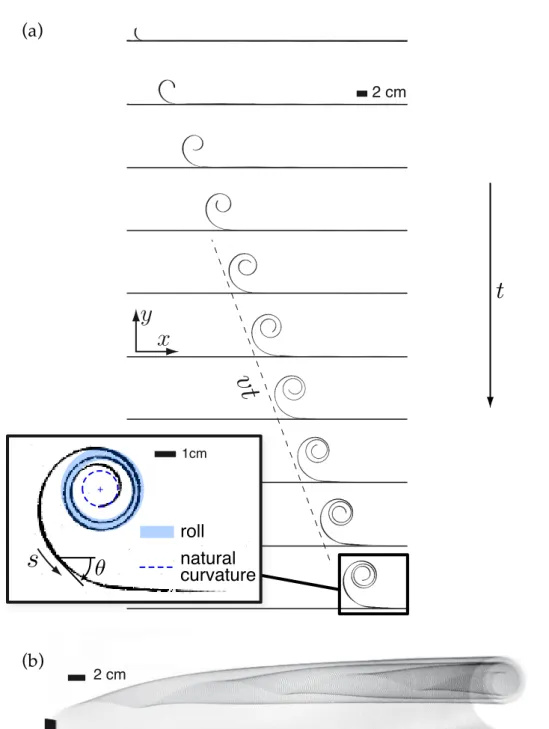
La forme de la bobine est représentée en détail dans l'encadré : une bobine avec une courbure quasi constante (bleu) est formée et elle a un rayon supérieur à κ−01 (ligne pointillée). b) Chronophotographie au temps = 30,85 ms. Ces cercles ont une courbure environ deux fois supérieure à celle de l'extrémité libre du ressort. On peut estimer l'ordre de grandeur des différentes forces en présence pour vérifier qu'on peut faire les approximations souhaitées : à savoir négliger la gravité et les forces d'origine aérodynamique.
Étude numérique
Gestion du contact
La longueur élasto-gravitationnelle g = (ρgB)1/3 mesure la valeur relative des forces élastiques de torsion et de la gravité. Nous aurons donc plusieurs rotations en même temps et nous pourrons négliger l’influence de la gravité. Estimons maintenant la valeur du coefficient�défini comme le rapport des forces de torsion et des forces extérieures d'origine aérodynamique.�= ρaCBκD3v2b.
Description du problème
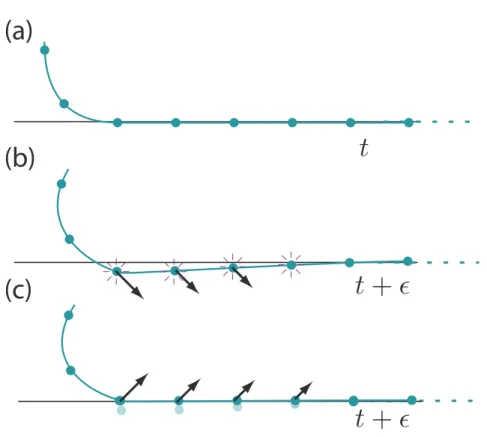
Pour tenir compte de l'intégration permanente de la partie droite de la bande, nous définissons les positions et les vitesses des deux premiers sommets x0 et x1 comme nulles à tout moment. L'effet de l'appui est d'empêcher les sommets de la ligne pointillée {x0, x1, .., .., xn} de pénétrer en dessous du niveau noté pary= 0. Cette mise en œuvre équivaut à une force de contact sans frottement dans l'hypothèse où le pas de temps est suffisamment petit.
Résultats
Zone de départ où la courbure est une fonction croissante de l'abscisse curviligne montrant des ondulations. On peut comprendre cela en observant le mode de convergence de la spirale vers la zone suivante.
Article
The shape of the curled area is shown in close-up of (a): a roll is formed with an almost constant curvature (light, thick circle, blue online) whose radius is greater than !"01 (dashed line). It predicts that the The y-coordinate of the center of mass of the curled elastic has a short scale. In Figure 3 we show the results of numerical simulations of the shape of the curled elastic at long times.

Conclusions
- Influence de la gravité
- Rôle du support
- Bestiaire de boucles
- Un système assez générique
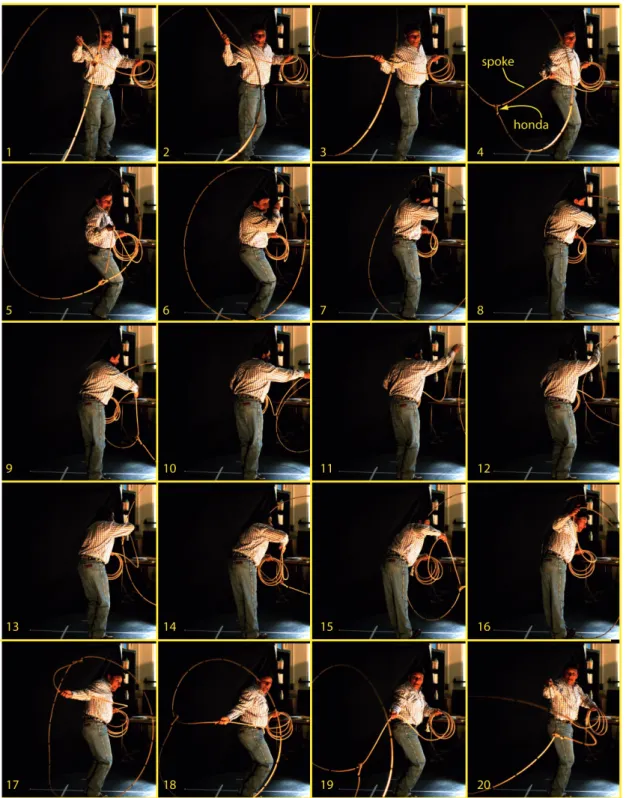
Notons le passage de la corde sous ses pieds à l'aide d'un talon pointe entre les images 6 et 8. Au-delà de la capacité des Cowboys, le lasso peut se résumer à la réponse d'un objet fin soumis à une pression périodique. La main du cow-boy se déplace en cercles de rayon R avec une vitesse Ω. 2) Le lasso est constitué d'une corde de rayon a, de densité ρ et de résistance à la flexion B = EI.
La dynamique du lasso
- Enoncé du problème
- Méthodes de résolution
- Résultats théoriques
- Résultats expérimentaux
Le point de départ du problème est marqué sur le tracé 3D de la figure 6.4, c'est le milieu de la boucle. La position au bout de la corde (Ls) correspond à la position de la main du Cowboy. Bien entendu, il est également possible de modifier la position de la main du cowboy.

Rôle du frottement au honda
Equilibre au honda
Nous commençons par valider nos calculs en utilisant la troisième expérience et les paramètres expérimentaux suivants. Le contact est en forme de point et la normale à ce point k est calculée en résolvant la forme détaillée de la corde passant à travers la Honda. On dispose donc d'un critère d'évaluation de la viabilité d'une configuration lasso qui peut être ainsi formalisé.

Conclusion
Ces configurations sont produites par la résolution complète de la forme de la corde dans la couche limite Honda. Cela signifie notamment qu'il y a une discontinuité dans la puissance interne lorsque la Honda passe, mais pas dans sa norme. Cet oscillateur sera alors forcé par un terme non linéaire qui inclut les effets de la partie basse.

Ondes spirales de bulles
Le point le plus important est que le code est assez fidèle à la réalité et particulièrement flexible. Une méthode de traitement des équations de la dynamique des filaments visqueux a été présentée dans ce manuscrit et a été matérialisée à travers la simulation d'une machine à coudre fluide et son étude détaillée présentée au chapitre 4. Nous avons soutenu que la partie supérieure de ces courants est presque linéaire et peut donc être considérée comme un oscillateur.
Le lasso
Ensuite, le tenseur des contraintes de Cauchy σ est responsable de la composante visqueuse et élastique. Le solvant a une viscosité µ et T est le tenseur de contrainte du polymère qui suit la relation. L'aérodynamique de la corde à sauter. Actes de la Royal Society A : Sciences mathématiques, physiques et de l'ingénierie.
![Figure 7.3 – Trois situations avec des micro-émulsions pontées fabriquées au LCVN – Un fluide "parfaitement visco-élastique" [71]](https://thumb-eu.123doks.com/thumbv2/1bibliocom/463137.68961/131.892.118.734.169.955/figure-situations-émulsions-pontées-fabriquées-fluide-parfaitement-élastique.webp)