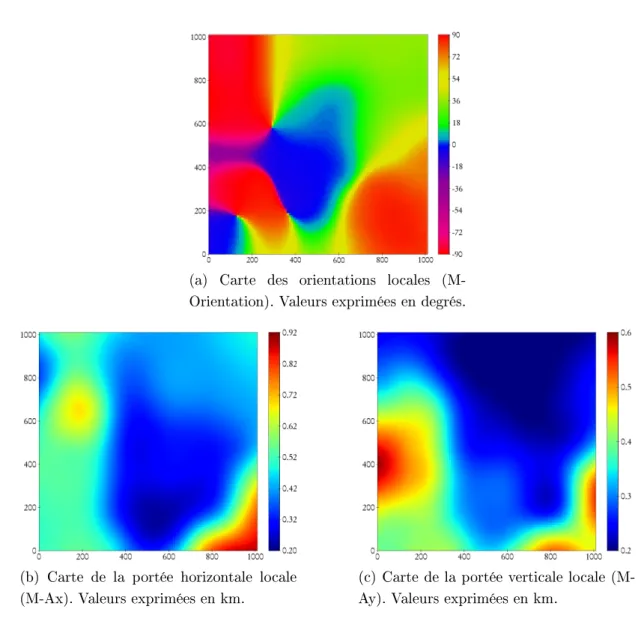
Le résultat de la détermination du paramètre M est un meilleur ajustement entre les modèles variographiques et les caractéristiques structurelles des données. En deux dimensions, les deux portées et l'angle de structuration local correspondent à l'ellipse de corrélation.
Contexte et objectifs
La mise en oeuvre et la validation de ces approches dites variographiques est facilitée par l'interprétation relativement simple qu'il est possible de faire de plusieurs paramètres du variogramme. Sans surprise, la partie non stationnaire de la géostatistique a peu d'applications industrielles.
Organisation du manuscrit
La première application (chapitre 6) sera liée à l'étude géostatistique de données bathymétriques 2D. La deuxième étude, qui utilisera des données réelles de champs pétrolifères, comprendra une analyse 2D et 3D, en modes binaire et niveaux de gris, et un exemple d'utilisation de la distance géodésique.
Notion d'espace discret
- Introduction
- Images
- Points
- Représentation
- Relations de voisinage - connexité
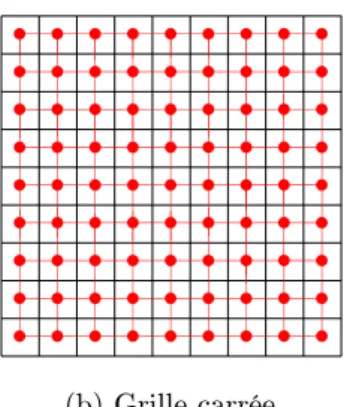
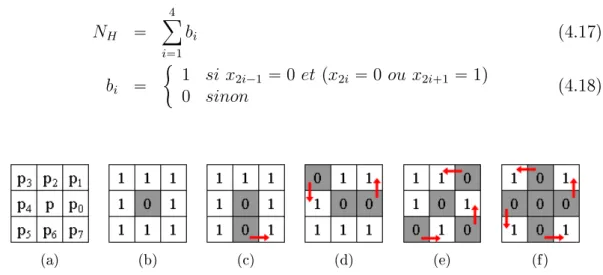
Enfin, d'un point de vue informatique, une image numérique est simplement une suite d'entiers compris entre 0 et 2m1. Dans le cadre d'une image, on revient à la notion de connectivité : elle correspond au voisinage élémentaire non vide d'un pixel p sur une grille numérique.
Présentation de la géostatistique
- Introduction - un bref historique
- Variable régionalisée - fonction aléatoire
- Hypothèses de stationnarité de la fonction aléatoire
- Introduction
- Hypothèse de stationnarité d'ordre 2
- Hypothèse de stationnarité intrinsèque
- Comparaison des deux hypothèses
- Le variogramme
- Introduction
- Caractéristiques du variogramme
- Modélisation
- Krigeage et simulations
- Le krigeage
- Les simulations géostatistiques
Dans le cadre de la géostatistique stationnaire, nous nous limitons à l'étude des deux premiers moments d'une fonction aléatoire. Il est généralement difficile de prouver qu'une fonction donnée est un modèle de variogramme admissible.
Conclusion
La deuxième difficulté est liée aux outils disponibles pour traiter les phénomènes non stationnaires. Le premier type d'outils est issu d'une géostatistique strictement non stationnaire, pour laquelle les modèles réels non stationnaires sont refusés.
Géostatistique non stationnaire
Krigeage universel
FAI-k
Limitations des modèles non stationnaires
Les approches non stationnaires par caractérisation locale
- Cadre de réalisation unique
- Approche par convolutions
- Approche par noyaux locaux pondérés
- Approche utilisant un gradient
- Approche quasi stationnaire
De plus, du fait de sa construction, il est incapable de contrôler un changement brutal dans la structuration spatiale des données. Cependant, cette approche est actuellement limitée aux modèles 2D linéaires, ce qui limite la validité des paramètres variographiques obtenus lors de la dernière itération.
Interprétation des paramètres variographiques
Utilisation des M-Paramètres
Cadre d'utilisation
Principe
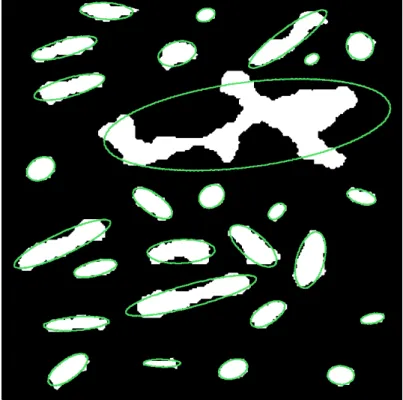
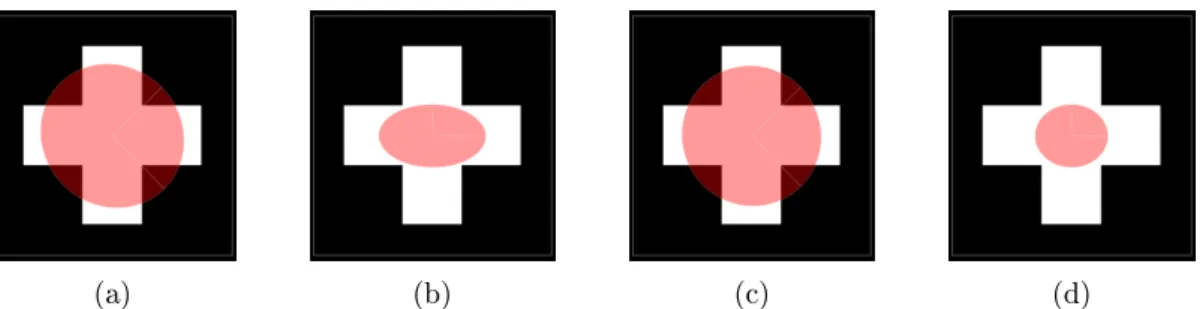
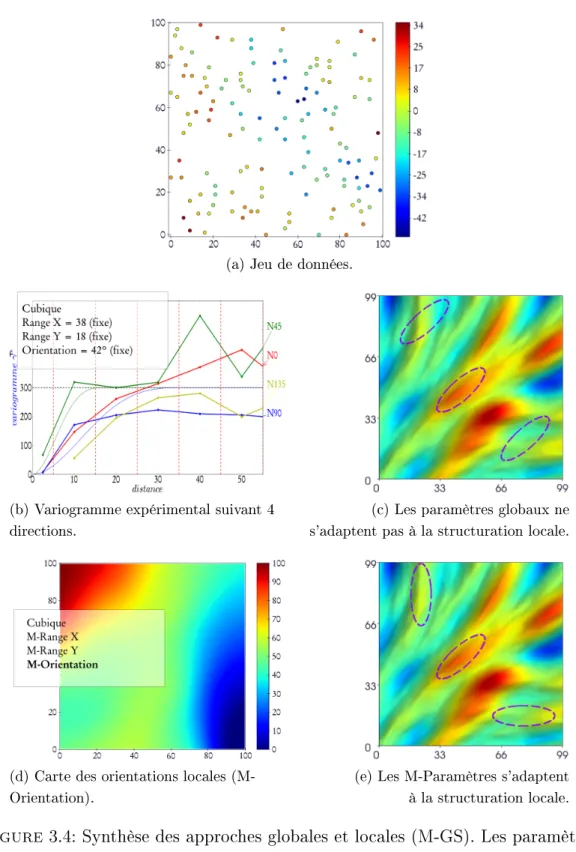
Ainsi, si l'on considère l'orientation, elle varie bien cette fois entre 0 et 90. L'ellipse de corrélation est localement adaptée pour structurer les données (figure 3.4e). Paramètres globaux qui traduisent la structure des données à l'échelle globale, on obtient une anisotropie de 42.
Exemple d'utilisation
En effet, l'écart-type de krigeage est généralement très sensible aux paramètres du modèle de variogramme. L'écart-type de krigeage se comporte de manière identique sur tout le domaine avec la méthode globale.
Conclusion
Néanmoins, dans ce chapitre, nous avons délibérément évité cette question fondamentale : le calcul proprement dit des paramètres M. Dans le chapitre 3, nous avons défini un cadre général appelé M-GS, dont les fondements reposent sur l'hypothèse de stationnarité locale.
État de l'art de la caractérisation de formes binaires
- Introduction
- Caractéristiques globales simples
- Longueur, rayon, centre et extrémités géodésiques
- Codage de contours
- Moments
- Squelette d'une forme binaire
- Conclusion
Il est possible de reconstruire complètement une forme binaire à partir de la connaissance de ses moments. Les moments d'ordre 1 (m10, m01) permettent de déterminer le barycentre de la forme pxc, ycq.
Méthode basée sur un squelette
Introduction - recherche méthodologique
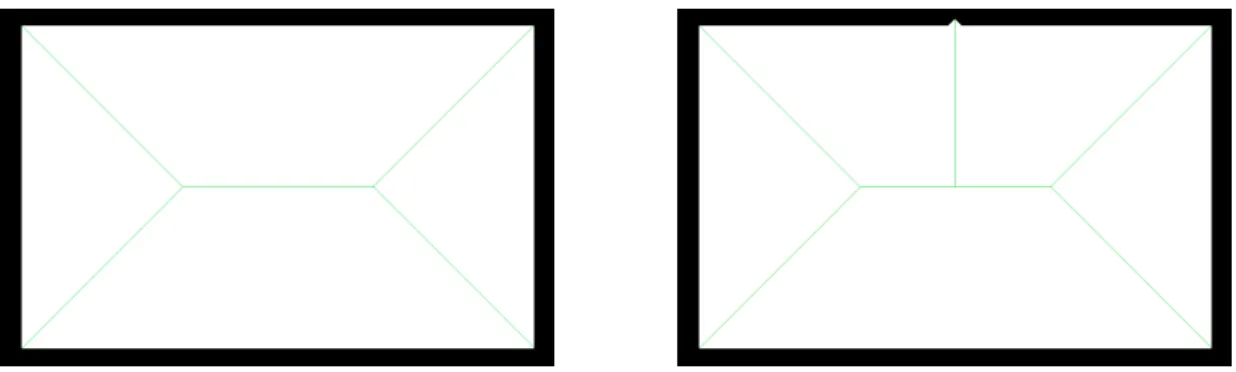
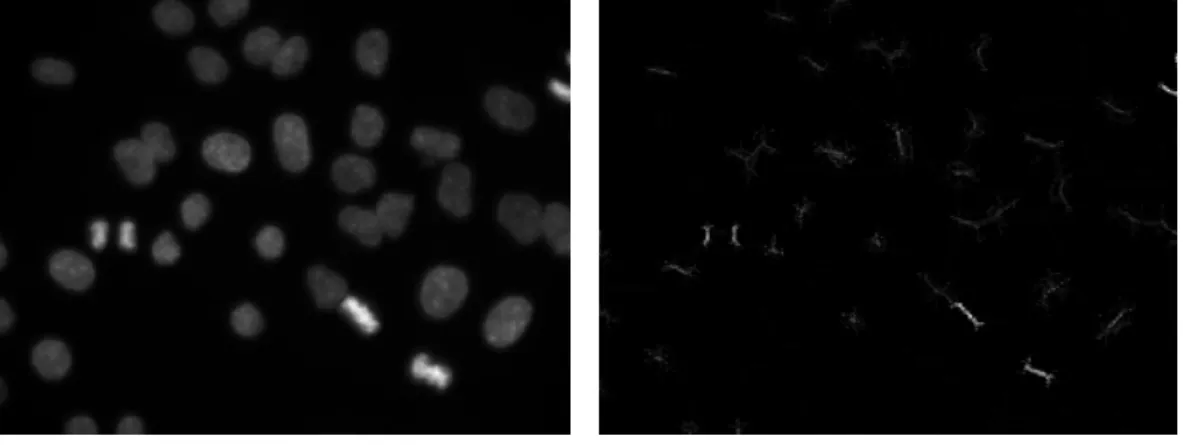
Cette double opération de calcul de la fonction de distance puis d'extraction des maxima régionaux revient simplement à calculer le squelette en ouvrant la forme (figure 4.12b). Le deuxième défi est de propager l'information calculée aux points du squelette en ouvrant au reste de la forme binaire.
Présentation de la méthode
- Calcul du squelette et décomposition
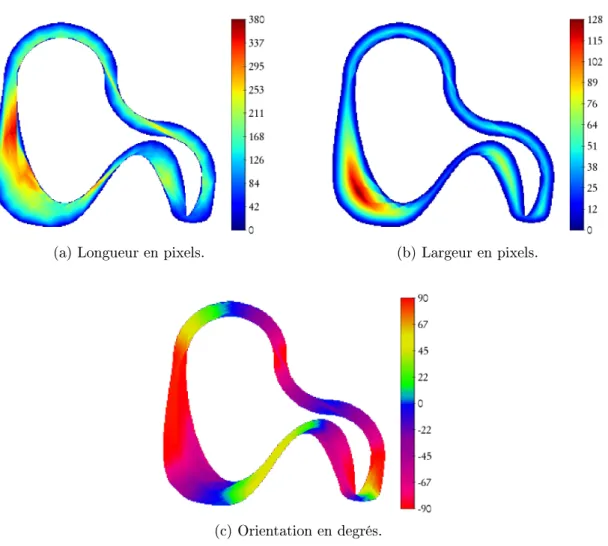
- Estimation de l'orientation, la largeur et la lon-
- Propagation des mesures locales à l'ensemble de
La largeur d'un point du squelette, en revanche, correspond à sa distance au point le plus proche du complément de la forme. Enfin, la longueur correspond à la longueur du segment orienté selon la tangente au point le plus proche du complémentaire de la forme (figure 4.16b).
Bilan
Méthode dite du lancer de rayons
Introduction
Présentation de la méthode
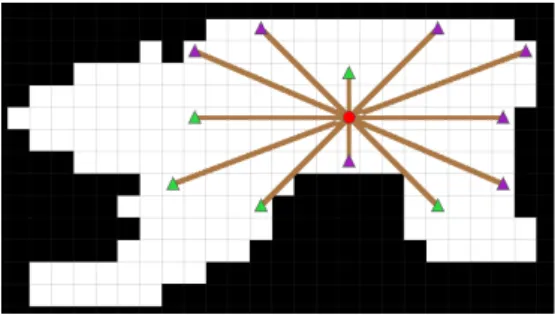
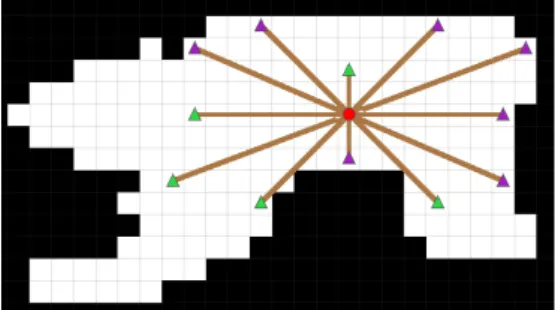
Cependant, si l'on considère deux rayons de sens opposés sur la figure 4.20a (par exemple, 90 et 90), ils ont la même direction, mais leur longueur n'est pas identique. Les moments de la forme sont rapidement calculés à partir de sa trajectoire de contour (Yang & Albregtsen (1996)).
Estimation de l'erreur d'ajustement
Il est possible de corriger directement, pour tous les pixels de la forme, le grand axe de l'ellipse par rapport à l'erreur maximale apparaissant sur la forme (emax), le grand axe a et le petit axe b de l'ellipse E à corrigée. Cependant, on peut combiner les deux approches : on commence par supprimer les membres avec une trop grande erreur d'ajustement, puis on calcule le nouvel axe majeur de l'ellipse.
Comparaison des deux méthodes
Passage des mesures locales aux M-Paramètres
Du point de vue de la géostatistique, le passage de la géostatistique stationnaire à la M-GS revient à passer de paramètres globalement fixes à des paramètres variables en chaque point cible. Enfin, si les résultats des calculs de mesure de longueur et de largeur sont donnés en pixels, il faut tenir compte de la résolution de la grille pour les traduire en paramètres M.
Exemple d'application
Dans ce cas on affecte une longueur et une largeur égales, ainsi qu'une valeur d'orientation quelconque comme 0 par exemple : cela n'affecte pas le calcul. utilisons la méthode du rayon sur l'image binaire obtenue et sur son complément pour obtenir une mesure locale pour tous les pixels de l'image. Cependant, choisir de seuiller l'image d'entrée au niveau de la moyenne des données est très risqué.
Conclusion
Dès lors, on peut se demander s'il n'est pas possible de travailler directement sur des images en niveaux de gris. Tout au long du chapitre, nous alternons entre images en niveaux de gris et images numériques.
Méthodes de caractérisation de formes en niveaux de gris
- Transformation résiduelle
- Squelettes en niveaux de gris
- Extrema et dynamique
- Champ d'orientation
- Conclusion
Un exemple de calcul du squelette par ouverture en niveaux de gris est présenté à la figure 5.1. L'équivalent en niveau de gris de cette fonction résiduelle est appelé la quasi-distance (Beucher (2004)).
Généralisation de la méthode du lancer de rayons
- Introduction
- Retour sur la méthode binaire
- Détermination des extrémités sur une image en niveaux de
- Algorithme ecace de calcul
- Introduction
- Détermination des extrémités le long d'une droite 102
- Résumé de l'algorithme
Deuxièmement, le problème de la détermination des extrémités se résume à déterminer un contour d'une forme en nuances de gris. A l'issue de cette étape, nous avons donc attribué une extrémité à chaque pixel de la ligne.
Exemple d'application
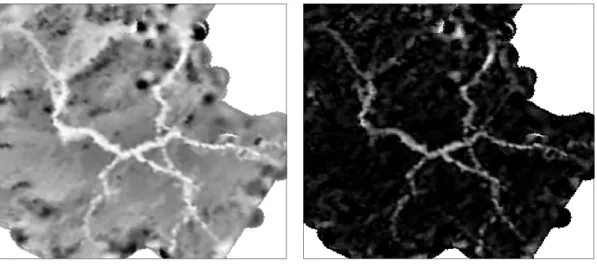
On calcule la quasi-distance de l'image initiale (Figure 5.11a) et de l'image inverse pour indiquer les nuances sombres de l'image (Figure 5.11b), puis on prend le supremum des deux images (Figure 5.11 vs ). Contrairement au seuillage direct de l'image d'étude pour la réduire à une étude binaire, cette fois nous avons utilisé des informations beaucoup plus riches.
Conclusion
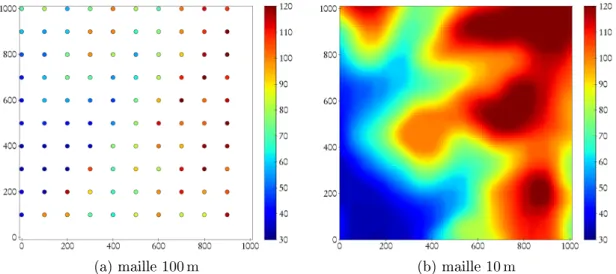
Nous avons finalement réalisé que l'interprétation structurelle des paramètres variographiques constitue le lien intéressant entre env. Ce chapitre a une portée pratique : il illustre l'application des méthodes de traitement d'images à la détermination des paramètres M et leur contribution à interpoler efficacement, dans un contexte de canalisation, des données bathymétriques.
Contexte - présentation du jeu de données
Cartographie par krigeage global
Cartographie par krigeage avec M-Paramètres
- Principe
- Étude binaire
- Segmentation du chenal
- Estimation des M-Paramètres et krigeage
- Étude en niveaux de gris
- Combinaison des deux approches
Comme on peut le voir sur la figure 6.12, l'estimation en niveaux de gris permet de mieux reconstruire les parties étroites du canal. La troisième approche, l'approche M-GS en niveaux de gris, fournit une solution au problème de reconstruction de canal.
Bilan
Le calcul des paramètres M avec la méthode des niveaux de gris prend moins de 5 secondes. Ainsi, d'un point de vue pratique, le traitement de données 3D peut être très coûteux en temps de calcul, tant pour déterminer les paramètres variographiques que pour les exploiter.
Présentation des nouveaux paramètres 3D
D'un point de vue théorique, il est nécessaire de calculer un plus grand nombre de paramètres variographiques. Il est également nécessaire de disposer d'outils de visualisation performants pour les données tridimensionnelles.
Méthode de calcul des mesures locales 3D
- Introduction
- Tracé des rayons
- Calcul des extrémités
- Ajustement de l'ellipsoïde
- Introduction
- Ajustement de l'ellipsoïde par moindres carrés
- Ajustement de l'ellipsoïde par le calcul des mo-
- Comparaison des deux méthodes d'ajustement
A partir de ces notations, le problème de minimisation est reformulé sous la forme de la méthode des multiplicateurs de Lagrange. Les éléments diagonaux de la matrice d'inertie (équation 7.17) sont appelés les moments d'inertie, les autres éléments sont les produits d'inertie.
Visualisation des M-Paramètres 3D
La représentation des vecteurs sur un plan 2D semble plus pertinente que sur l'ensemble du volume 3D (Figure 7.8). Il est possible de visualiser les champs d'ellipsoïdes sur tout le volume 3D ou sur des coupes selon des plans 2D.
Exemple d'utilisation
D'une manière générale, il n'existe pas de moyen générique de représentation de paramètres M tridimensionnels ni de solution clé en main comme nous l'avons vu dans cet exemple volontairement très simple et facilement interprétable. Notons que les représentations vues précédemment de ces paramètres sous forme de vecteurs (figure 7.11) et d'ellipsoïdes (figure 7.12) sont particulièrement intéressantes pour les données de type canal.
Conclusion du chapitre
Ce dernier représente un champ d'étude qui n'est pas convexe et à l'intérieur duquel la distance réelle entre les points de données n'est pas euclidienne. Après tout, dès que le domaine d'étude n'est pas convexe, il semble plus cohérent d'utiliser des distances non euclidiennes.
De la diculté d'utiliser des distances non-euclidiennes
Validité du variogramme
En utilisant la distance de Manhattan (également appelée distance de pâté de maisons), c'est-à-dire. la distance discrète sur un repère 4-connexe défini en 2D par dpi, jq. xjxi| |yjyi|, on obtient la matrice de distance suivante entre ces 4 points. Puisque cette matrice n'est pas positive négative, nous pouvons conclure que la fonction de covariance gaussienne n'est pas positive négative pour la distance.
Calcul des distances
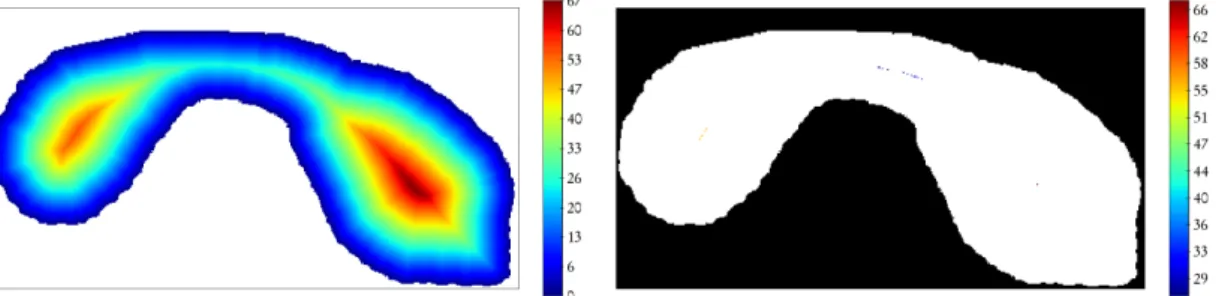
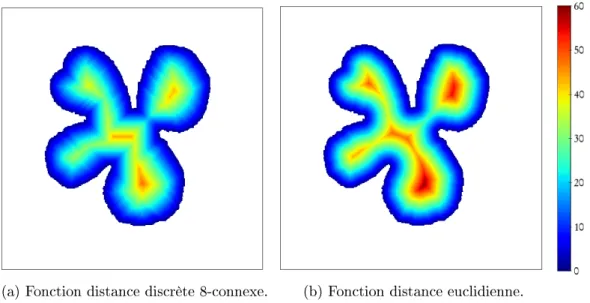
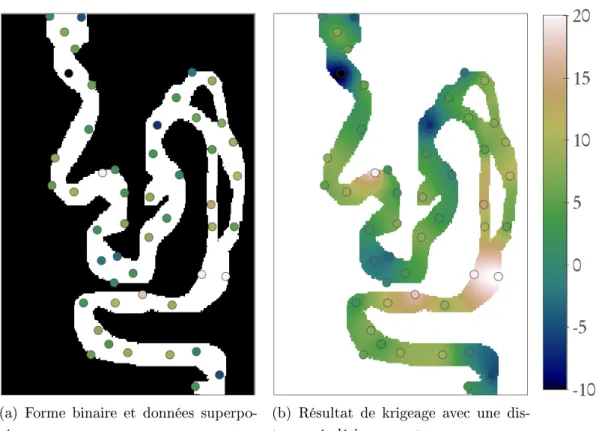
En partant de l'un des bords de la forme précédente et en utilisant une implémentation optimisée de distance géodésique discrète à 4 liens basée sur l'espérance, nous obtenons un temps de propagation géodésique de 0,048 seconde. De plus, le temps de propagation précédent était à partir d'un bord de la forme, ce qui est un temps de propagation maximum.
Bilan
En supposant un temps de propagation moyen de 0,023 seconde, nous obtenons un temps total de 554,48 secondes ou 9 minutes et 14 secondes. Enfin, nous avons effectué une estimation par krigeage dans le binaire précédent en utilisant un modèle de variogramme sphérique, une plage de 300 pixels et un seul environnement (Fig. 8.3b).
Les diérentes distances utilisées
- Introduction
- Water distance
- Fonction distance basée sur un temps de parcours
- Distance le long de rivières
- Bilan
En morphologie mathématique, la distance basée sur le temps de parcours correspond à la notion de temps géodésique qui est une généralisation de la distance géodésique binaire (Soille (1992), Soille (1994)). Enfin, l'ajout ou la suppression de points de données peut modifier considérablement l'apparence de la matrice approximative.
Étude de cas - estimation de la pollution de l'air en milieu urbain 171
Présentation des données
Pour le calcul de la distance géodésique binaire euclidienne, Soille (1992) propose également un algorithme de calcul, tout comme Cárdenes et al. Lors des différentes tentatives de calcul de la distance géodésique exacte, la méthode de Cárdenes et al. (2010) a toujours été plus rapide que celle de Soille (1992) avec des résultats identiques.
Variogramme géodésique
Nous avons vérifié précédemment que la distance géodésique binaire correspond particulièrement bien à la répartition d'un polluant le long d'une route. Pour une propagation effectuée à partir d'un point au milieu du réseau routier, on obtient un temps de propagation total de 2,01 secondes pour une distance euclidienne géodésique.
Krigeage euclidien et géodésique
- Introduction
- Données à minuit
- Données à 9h du matin
- Bilan
Conclusion du chapitre
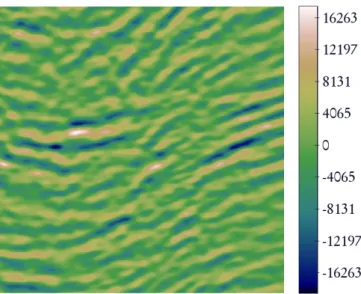
Simulation de données de porosité
Introduction
Estimation des M-Paramètres
Simulation géostatistique
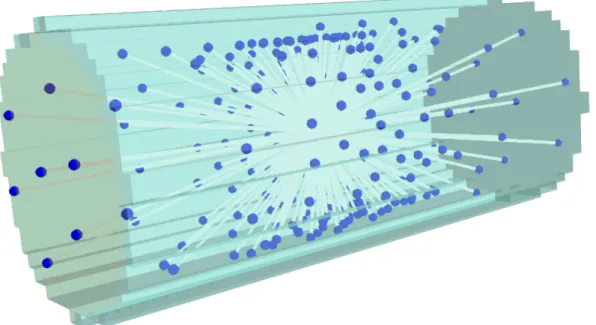
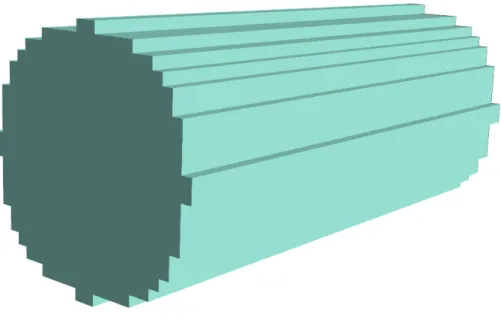
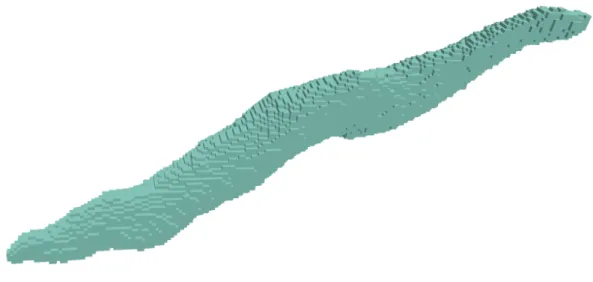
Étude d'un geobody
Introduction
Étude en deux dimensions
- Présentation des données
- Caractérisation binaire
- Caractérisation en niveaux de gris
- Krigeage avec des distances euclidiennes et géo-
Étude en trois dimensions
- Estimation des M-Paramètres
- Visualisation des résultats
Conclusion du chapitre
Détermination de paramètres variographiques locaux
Applications
Retombées industrielles
Perspectives