142 6.4 La différence entre les deux façons de calculer les facteurs de forme, pour ´ele-. 143 6.5 La différence entre les deux manières de calculer les facteurs de forme, pour ele-.
La m´ ethode de radiosit´ e
La radiosité Bi d'un élément dépend en réalité de l'apport énergétique qu'il reçoit des autres éléments de la scène. Dans le cas de la méthode Jacobi, la radiosité d'un élément dans l'itération (m) sera calculée en fonction des valeurs de radiosité des autres éléments. éléments en répétition (m−1).

Le facteur de forme
Le facteur de forme point à élément entre le point y et l'élémentPik est alors exprimé par : δFk= 1. Le facteur de forme d'un élémentPik de la source est ensuite approximé par .

Le maillage de discontinuit´ e
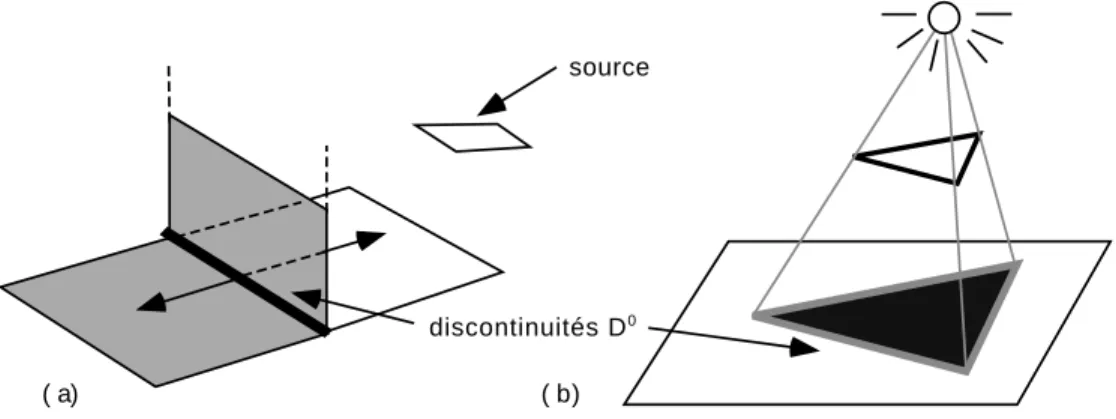
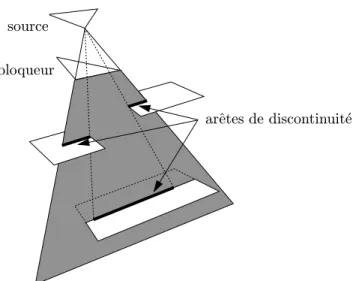
Les discontinuités dans la fonction radiosité correspondent à des changements de visibilité dans la scène. Chaque surface est recoupée avec tous les polygones de la scène pour déterminer les discontinuités correspondantes.
![Fig. 1.8 - Subdivision adaptative g´en´er´ee le long d’une limite d’ombre (sch´ema issu de [SP94]).](https://thumb-eu.123doks.com/thumbv2/1bibliocom/464623.70097/36.918.344.609.691.974/fig-subdivision-adaptative-long-limite-ombre-issu-sp94.webp)
Techniques de visibilit´ e pour la radiosit´ e
Enfin, les auteurs expliquent comment maintenir le graphe de visibilité tout en subdivisant les polygones, pour pouvoir utiliser cette structure dans le cadre d'un algorithme de radiosité hiérarchique. Au contraire, dans [DS96], Drettakis et Sillion proposent un calcul précis de la visibilité de la source, obtenu au moyen de la grille de discontinuité.
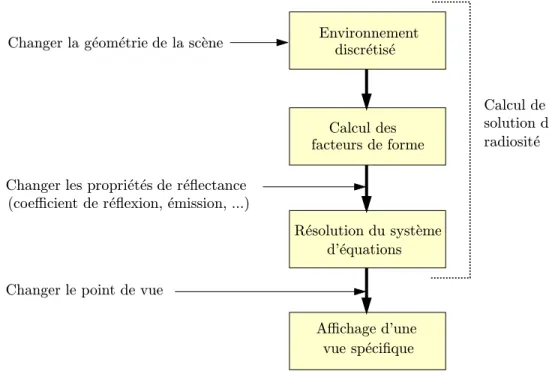
Radiosit´ e pour les environnements dynamiques
La première approche consiste à proposer une nouvelle solution de radiosité pour chaque nouvelle configuration de la scène. Cependant, le calcul des facteurs de forme constitue l'étape la plus coûteuse de la méthode de radiosité.
Le complexe de visibilit´ e
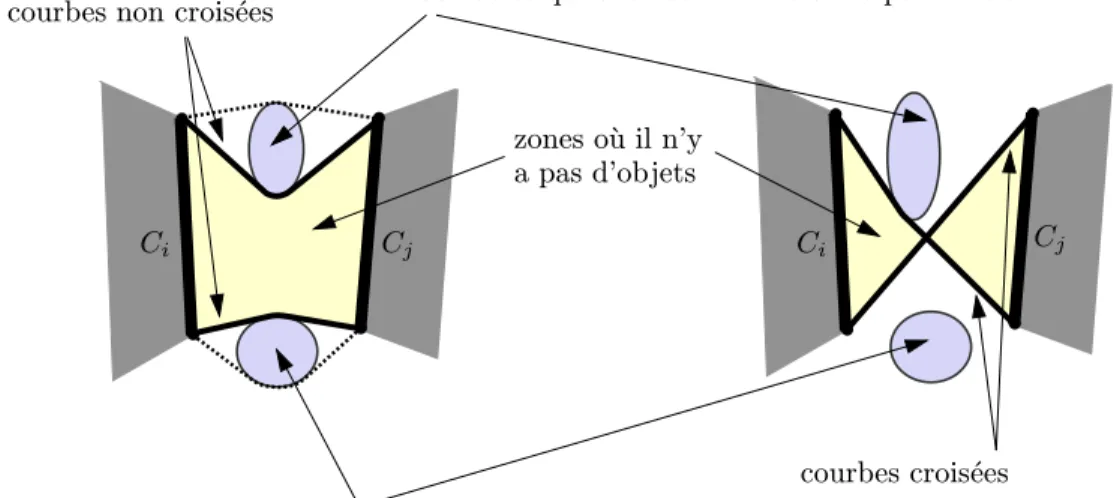
L'intersection en espace dual des deux régions comprises entre les lignes joignant les extrémités des deux bords des polygones donnés définit la région en espace dual correspondant aux lignes qui coupent ces deux bords dans la scène. La distribution double correspond ici à la division de l'espace dual en composantes connexes correspondant à des lignes qui coupent les mêmes bords des polygones.
Discussion
Dans ce chapitre nous introduisons deux expressions du facteur de forme que nous réutiliserons plus tard : une première expression sous la forme d'un rapport de mesures de lignes, et une seconde sous la forme d'une somme pondérée 'er'ee de longueurs de courbes. La première expression est valable à la fois en 2D et en 3D, tandis que la seconde n'est valable qu'en 2D.
Facteur de forme comme un rapport de mesures de droites
Sbert [Sbe93] a utilisé cette formulation pour calculer les facteurs de forme entre deux surfaces dans le cas 3D. Pellegrini [Pel95] a également utilisé une caractérisation des facteurs de forme basée sur des concepts de géométrie intégrale pour calculer une approximation Monte Carlo des facteurs de forme. Cette expression du facteur de forme sous forme de rapport de mesures planaires reste évidemment valable en 2D, sauf que l'on ne considère plus des surfaces, mais des parties de courbes dans le plan.
Fij = Mesure de l'ensemble des lignes coupant Ci et Cj sans obstacle. Mesure de l'ensemble total des lignes coupant Ci (2.5) Dans le cas 2D, en outre, il est possible de calculer les facteurs de forme de manière si précise en utilisant une géométrie intégrale qui fournit des mesures précises des ensembles de lignes dans le plan (cf. [ San76]).
Facteur de forme comme une somme pond´ er´ ee de longueurs de courbesde courbes
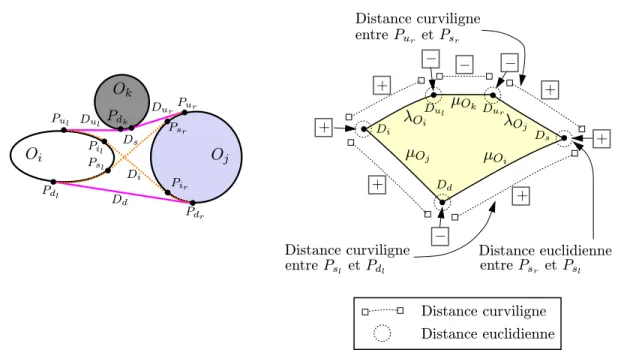
Correspondance entre les deux formulations de facteurs de forme : Soit mso(Ci, Cj) la mesure de l'ensemble des lignes qui coupent deux parties de courbe Ci et Cj sans couper aucun obstacle situé entre les deux, et soit m(Ci) la mesure de l’ensemble général des lignes coupant Ci. C et C′, et m(C, C′, C′′) la mesure de l'ensemble général des droites coupant trois parties des courbes C, C′ et C′". On note (C, C′/C′ ′) la mesure de l'ensemble des droites qui coupent deux parties des courbes C et C′ sans couper une partie de la courbe C′′.
Notez les extrémités de l’obstacle dans le cas de l’exemple de la figure 2.8(a).
Expression du facteur de forme d´ efini par un rapport de mesures de droitesmesures de droites
Une ligne droite de la scène est représentée par un point dans l'espace double (θ, u). Chaque face reliée à Oi et Oj est représentée, dans l'espace dual (θ, u), par une région de points délimitée par un ensemble de courbes u(θ) (courbes de fonction de θ) . Dans le cas de la dualité (θ, u), cela correspond à un point de coordonnées (θ, u) dans l'espace dual.
Dans le cas de la dualité (a, b), un point correspond aux coordonnées (a, b) dans l'espace dual.
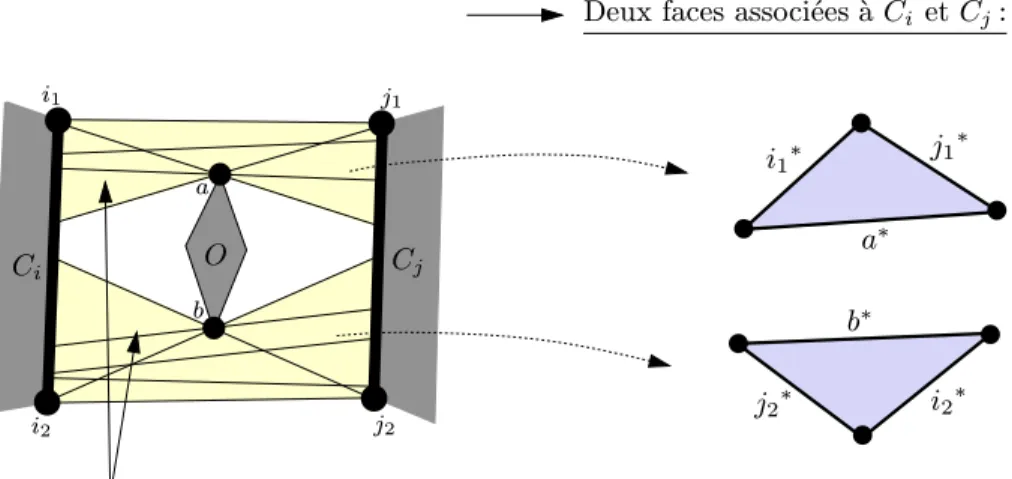
Le facteur de forme entre deux objets convexes Oi et Oj peut alors être exprimé à partir de là. En connaissant les coins de la surface reliés à deux arêtes de polygone Ci et Cj, il est alors possible de calculer le facteur de forme Fij entre ces deux arêtes de polygone. Le facteur de forme entre deux bords de polygone peut alors être exprimé à partir de la surface connectée à Ci et Cj par.
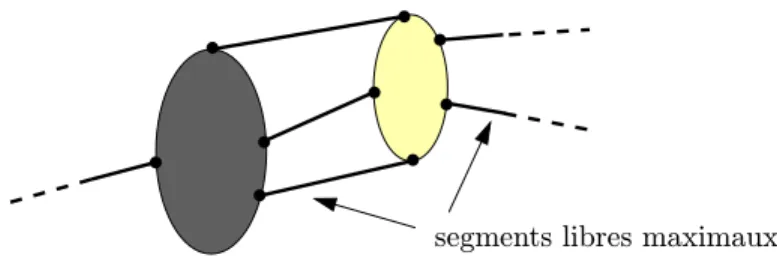
Calcul de la valeur d(v) : La valeur d(v) représente, pour un sommet v donné de la surface, qui est relié à deux arêtes des polygones Ci et Cj, la longueur de la partie plane correspondante dans la scène.
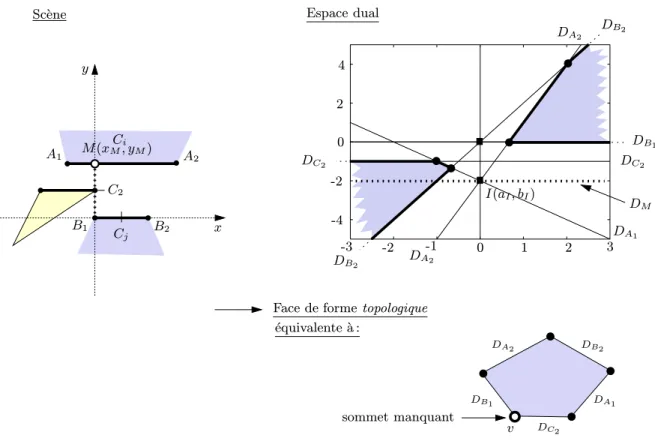
Si les coordonnées au niveau de la scène sont exprimées dans le repère (O, x, y), on voit qu'une partie des segments libres maximum de la face associés aux bords des polygones [A1A2] et [C1C2] sont verticaux. On s'affranchit également du type de dualité choisi, puisque la forme topologique ne prend pas en compte les équations des arêtes, ni les coordonnées des sommets du plan dans l'espace dual. Revenons à l'exemple de la Figure 3.10, où le plan associé aux deux arêtes du polygone considéré [A1A2] et [B1B2] a la forme ((semi-infini)) dans l'espace dual (a, b).
Cette interprétation consiste à dériver la valeur du facteur de forme à partir des sommets du plan du complexe associé aux deux arêtes du polygone considéré.

Diff´ erents types de discontinuit´ e et correspondance dans l’espace dual
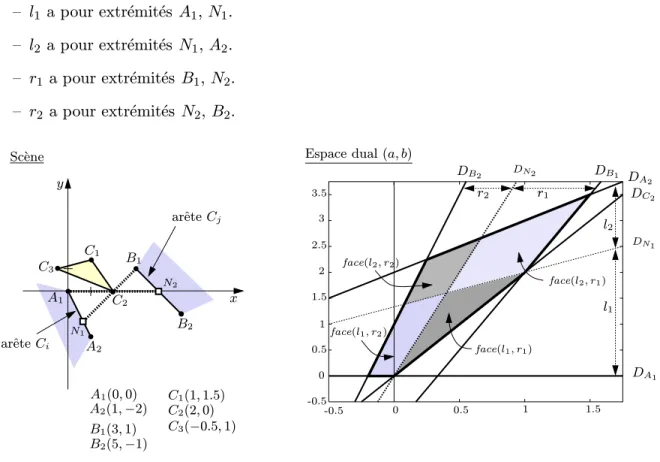
Dans un espace double, l'une des deux arêtes qui tombent sur le plan f au sommet v est donc associée à l'objet Oi, et l'autre à l'objet Oj. La facef est associée à deux arêtes de polygone Ci et Cj données dans la scène. 4.2 - Deux arêtes des polygones Ci et Cj et leurs plans associés sur le plan du complexe de visibilité.
Si l'une des deux arêtes incidentes au point v est reliée à l'une des parties extrêmes de Ci (ou Cj), alors le sommet v permet de déterminer le point de discontinuité au niveau de l'arête Cj (ou Cj). Ci).

D´ etermination des points de discontinuit´ e au moyen du com- plexeplexe
Soit DM la ligne en double espace (a, b) qui représente l'ensemble des lignes passant par le point M de la scène. La droite DM passe par le sommet v dans l'espace dual, sachant que la droite connectée à av dans la scène coupe le bord du polygoneCi atM. Le point M appartient au bord du polygone Ci, donc la droite DM passe par le point d'intersection I des droites attachées à Cis deux extrémités du double espace (voir Figure 4.5).
Ce point d'intersection I dans l'espace double (a, b) correspond bien à la droite passant par le bord du polygone dans la scène.
Impl´ ementation du calcul du maillage de discontinuit´ e
Calcul des points de discontinuité pour les objets convexes Soit le complexe de visibilité associé à la scène. La figure 4.10 montre l'algorithme que nous utilisons pour calculer les discontinuités sur les bords du polygone d'une scène, en utilisant le complexe de visibilité. Calcul de points de discontinuité pour des polygones ou visibilités complexes associés à la scène.
Les faces du complexe dont l'une des deux arêtes associées est si sont comprises entre les lignes associées aux deux extrémités de si dans le double espace (a, b).
Calcul du facteur de forme entre deux ´ el´ ements
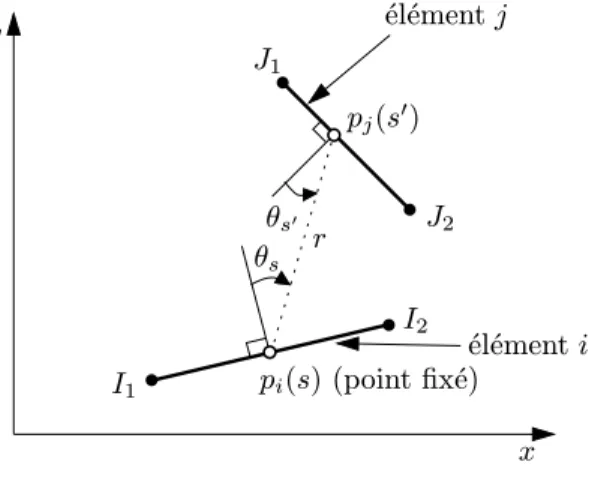
Connaissant ces sous-surfaces, nous pouvons maintenant calculer le facteur de forme entre deux éléments dans deux objets convexes en utilisant la sous-surface associée. Soit Fpirj le facteur de forme point par élément entre les éléments li et rj calculé au point li. Le facteur de forme du point d'élément Fpirj peut être exprimé très facilement dans l'espace dual (θ, u).
Connaissant la face associée aux deux éléments li et rj, pour calculer le facteur de forme Fpirj dans l'espace dual (θ, u), il suffit de tracer la courbe connexe ∗ dans l'espace dual (θ, u).
Impl´ ementation : Calcul des facteurs de forme entre ´ el´ e- ments au moyen du complexements au moyen du complexe
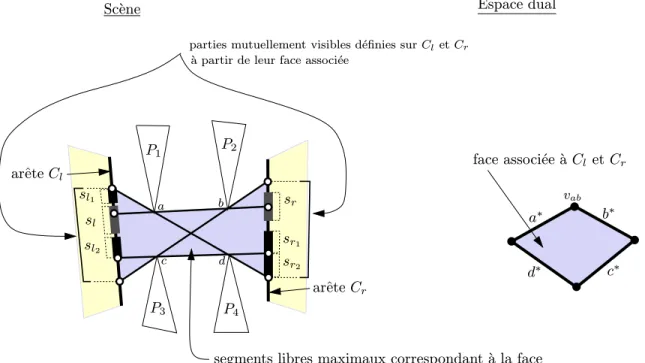
Nous notons l'objet actuel dans la liste supérieure des arêtes susceptibles d'interférer. Nous notons l’objet courant dans la liste inférieure des arêtes susceptibles d’interférer∗/. Considérons l'arête a∗ du plan correspondant aux deux arêtes des polygones Cl et Cr.
Soit ZIup la zone d'interférence courante de la liste du bord supérieur de la page considérée /∗page est connectée aux objets convexOletOr.
Pr´ esentation des deux m´ ethodes de calcul de facteurs de forme
Dans le cas d'éléments constants, le facteur de forme entre deux éléments ietj est approximé par le facteur de forme point à élément Fpij calculé au point pi, milieu de l'élément i. 6.2 - Visibilité entre deux éléments (Cas de la méthode de Heckbert avec éléments constants). Dans le cas d'éléments constants, pour calculer le facteur de forme entre deux éléments donnés dans ogj, nous calculons un seul facteur de forme point à élément au milieu de l'élément.
En revanche, dans le cas d'éléments linéaires, le facteur de forme est calculé point par élément.
Comparaison des valeurs de facteurs de forme obtenues
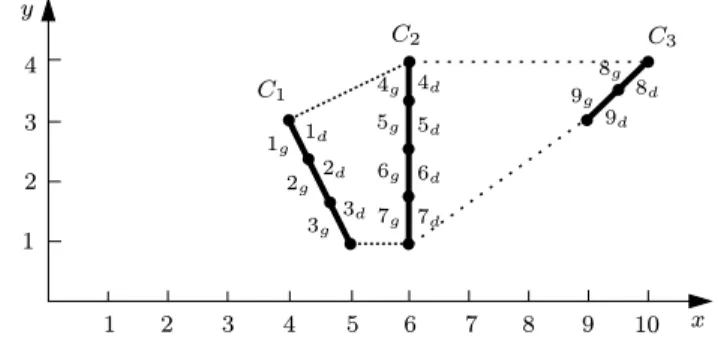
6.5 - La différence entre les deux méthodes de calcul des facteurs de forme, pour les éléments du côté droit de C2 et du côté gauche de C3. 6.7 - La différence entre les deux méthodes de calcul des facteurs de forme, pour les éléments du côté droit de C1 et du côté gauche de C2. Fig.6.8 - La différence entre les deux méthodes de calcul des facteurs de forme, pour les éléments du côté droit de C2 et du côté gauche de C3.
6.9 - Différence entre les deux méthodes de calcul des facteurs de forme pour les éléments du côté droit de C1 et du côté gauche de C3.
Tests sur des sc` enes complexes
6h15 – Temps de calcul des différentes étapes de notre programme pour chaque scène de 5 pièces des 5 pièces concernées. 6.16 – Temps de calcul des différentes étapes de notre programme pour chaque scène de 7 pièces par 7 pièces considérée. Figure 6.18 – Temps de calcul des différentes étapes du programme Heckbert pour chaque scène de 7 pièces par 7 pièces considérée.
6.20 - Temps de calcul des facteurs de forme en fonction du nombre de bords de polygone dans la scène.
Conclusion
Lorsqu'un objet change de position dans une scène, il est nécessaire de recalculer un certain nombre de facteurs de forme. Pour notre étude, nous nous plaçons dans le cas d’un objet se déplaçant continuellement le long d’une trajectoire. Le mouvement d'un objet dans la scène n'entraîne pas nécessairement une modification des relations de visibilité entre les objets.
Lorsqu'un objet s'est déplacé d'un petit déplacement dans une scène, deux cas peuvent se produire : soit les relations de visibilité dans la scène ne doivent pas être modifiées (on parlera plus tard de déplacement sans changement topologique de visibilité), soit les relations de visibilité sont modifiées (plus tard nous parlerons de déplacement avec changement topologique de visibilité).
D´ eplacement sans changement topologique dans la visibilit´ e
Mettre à zéro les facteurs de forme entre les éléments srdeCr dont l'extrémité ((high))pr0 ∈[prdown(f), prdown(i). Calculez les facteurs de forme entre les éléments sr deCr qui ont au moins une partie dans [prup(f), prdown(f)]. Mettre à zéro les facteurs de forme entre les éléments sr deCr dont l'extrémité ((inférieure))pr1∈[prup(i), prup(f)].
Définissez les facteurs de forme entre les éléments à zéro et les éléments sr deCr dont l'extrême ((haut))pr0∈[prdown(f), prdown(i)].

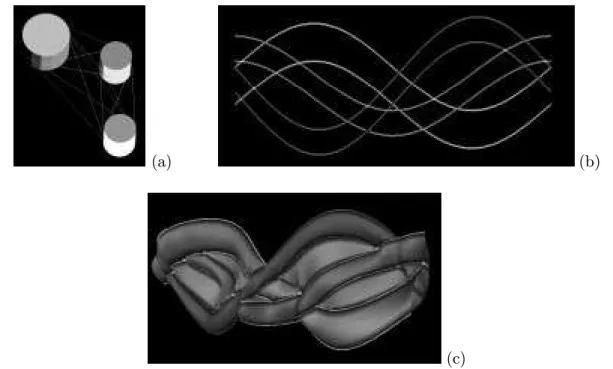
![Fig. 1.10 - Exemple de surface EV (sch´ema (b) issu de [DF94]).](https://thumb-eu.123doks.com/thumbv2/1bibliocom/464623.70097/39.918.132.717.83.256/fig-exemple-surface-ev-sch-ema-issu-df94.webp)

![Fig. 1.13 - Exemple de surface EEE (sch´ema (b) issu de [DF94]).](https://thumb-eu.123doks.com/thumbv2/1bibliocom/464623.70097/40.918.178.770.786.1002/fig-exemple-surface-eee-sch-ema-issu-df94.webp)
![Fig. 1.19 - Redistribution d’´energie li´ee ` a l’ajout d’un objet dans la sc`ene (sch´ema issu de [SP94]).](https://thumb-eu.123doks.com/thumbv2/1bibliocom/464623.70097/51.918.249.587.82.395/fig-redistribution-energie-ajout-objet-ene-issu-sp94.webp)