TÁVKÖZLÉSIÉS MÉDIAINFORMATIKAITANSZÉK
VILLAMOSMÉRNÖKITUDOMÁNYOKDOKTORIISKOLA
AZONNALI HIBA HELYREÁLLÍTÁS ÉS LOKALIZÁCIÓ
AZ ÁTVITELI HÁLÓZATOKBAN
Pa
ˇ
s i¢ Alijaokleveles villamosmérnök
Tézisfüzet
Tudományosvezet®
Dr. BabarziPéter
Budapesti M¶szaki és Gazdaságtudományi Egyetem
Távközlési ésMédiainformatikaiTanszék,
MTA-BME Jöv® Internet Kutatósoport,
Nagysebesség¶ HálózatokLaboratóriuma
Budapest
2018
Napjainkbanagerinhálózatiszolgáltatókazújalkalmazásoknak(távsebészet,t®zsde,
VoIP, multimédia)köszönhet®en egyre szigorúbb min®ségi(QoS -Qualityof servie)
követelményekkel szembesülnek, minda rendelkezésre állás, mind akésleltetés terén.
Továbbá,ajelent®senmegnövekedett (Tbyte/se-es nagyságrend¶)adatforgalommi-
att azer®források(pl. átvitelikapaitás) isegyre sz¶kebb keresztmetszetet képeznek.
Így korántsem meglep®,hogy az átvitelihálózatokkésleltetés t¶rése és megfelel®hi-
bavédelmeigensak aktuális kérdés.
Mára márazátvitelihálózatokátalakultak.Egyrésztateljesenoptikaialapúátvi-
telkerültel®térbe,kiküszöbölveazid®igényesésköltségesoptikai/elektromos/optikai
(O/E/O) jelátalakítást [16℄ [17℄. Másrészt megjelent egy új tehnológia, a Software-
DenedNetworking (SDN),amelyteljesenújalapokrahelyeziahálózatmenedzsmen-
tet.Az SDNeseténahálózatvezérl®ésadattovábbítófunkiókteljesenszétválasztód-
nak, így téve a hálózati vezérlést közvetlenül programozhatóvá.Nem meglep® tehát,
hogyazújmódszereknek megkellfelelniükazújtehnológiai(teljesenátlátszóoptikai
hálózatok,SDN) igényeknek éskövetelményeknek.
Viszont a magas QoS szint, vagyis a megbízható hálózatok tervezése és üzemel-
tetése továbbra is a szolgáltató érdekében áll, mivel a jól m¶köd®, megbízható, QoS
garaniákat vállaló hálózatokért az üzleti felhasználók lényegesen nagyobb összeget
is hajlandóak zetni [12℄. A felek ezeket a feltételeket a szolgáltatásmin®ségi(SLA -
ServieLevelAgreement)szerz®désben speikálják.Abbanazesetben hanemképes
a szerz®désben el®írt min®ség¶ szolgáltatást nyújtani, a szolgáltató komoly össze-
g¶kötbért zet a felhasználónak. Ennek elkerülése érdekében a szolgáltató törekszik
a hálózatmegfelel® (QoS szerinti) modellezésére, valaminta megfelel®hibamenedzs-
mentitehnológiákkiválasztására,természetesenazalasonylétesítésiésüzemeltetési
költségekmellett.Ezekben azúj hálózatokbanaTbyte/se-os nagyságrend¶[18℄ [19℄
átvitelisebességek miatta legrövidebb idej¶kiesés sem megengedett, mivelez hatal-
mas adatmennyiségek elvesztésével és a QoS szint drasztikus sökkenésével jár. Így
mindenkétségetkizáróanmondhatjukazt, hogyazazonnali helyreállítás kulskérdés
a megfelel®QoS biztosításában.
1.1. Deníió. Azonnali helyreállításról akkor beszélünk, ha a teljes helyreállítási
id® kevesebb mint 50ms (
t R ≤ 50ms
) [16℄.Ahhoz, hogy a helyreállítási id®t érdemben vizsgálni tudjuk, ismernünk kell a
helyreállításiiklust (GMPLS [14℄). Ennek f® lépései akövetkez®k:
1. hibaészlelésiid®(
t l
):vagyisameghibásodásésannakészlelése között elteltid®,2. hibaértesítési id® (
t n
): a hibát észlel® hálózati entitások szétterjesztik a hiba tényét a vezérl® síkon(ontrolplane, CP) küldött jelzések segítségével, hogyamegszakadt összeköttetések helyreállításáért felel®s somópontok fel tudjanak
készülnia helyreállításra,
3. korreláiósid®(
t c
): azaz id®, amialatt azösszes hibaüzenet beérkezik,4. döntéshozatali id® (
t d
): az az id®, ami alatt döntés születik arról, hogy milyenvédelmikapsolás szükséges,
5. kapsolási id® (
t s
): a somópontok konguráiójához, kapsolók beállításához szükséges id® (az optikai rétegben ez a leginkább id®igényes feladat, több tízmilliszekundumotvehet igénybe [36,37℄):
t R = t l + t n + t c + t d + t s .
(1)Célunk tehát a teljeshelyreállításiid® 50ms alatt tartása,így biztosítva azonnali
helyreállítást.Azonbanazazonnalihelyreállításnemazegyetlenfontos jellemz®jeegy
védelmimegoldásnak, hanem arobusztusság kérdése isigen jelent®s.
1.2. Deníió. Robusztus védelmi megoldásról akkor beszélnünk, ha a helyreállítás
sorána vezérl®síkban ninsszükségüzenetekküldésére, valamintaz optikaikapsolók
(OXC - Optial Cross-Connet) újrakongurálására [J1℄.
Disszertáiómels®felébenolyanújmódszereketjavaslok,amelyekrobusztusmódon
azonnalihelyreállítást biztosítanak,valaminthiba utániselegettesznekakésleltetési
kényszereknek alasony er®forrásigény mellett. Ezen új módszereket összehasonlítom
a jelenleg leggyakrabbanhasználatos tehnológiákkal.
Disszertáióm második felében a hibalokalizáió kérdésével foglalkozom, vagyis
olyan újlokálishibalokalizáiósmódszertjavaslok,amelylehet®véteszi azigen gyors
helyreállítástmegosztott védelmi módszerek esetén is (
t R
számottev®en sökken). A megosztottvédelmektermészetéb®ladódóanekkorisszükségvanazoptikaikapsolók(OXC)újrakongurálására,vagyisezenmódszereksemmilyen esetbensemlesznekro-
busztusak. Kiemelend®,hogy mivelaz optikai kapsolók (OXC) újrakongurálásának
idejea tehnológiátólfügg®en akártöbb 10mslehet [36,37℄, ígyannak ellenére, hogy
a hibaértesítési id® és hibalokalizáiós id® is sak néhány milliszekundum, mégsem
garantálható mindenesetben az azonnalihelyreállítás.
2. Kutatási élkit¶zések
Az értekezésem élja, hogy az átvitelihálózatokban olyanúj módszereket javasoljak
amelyekamellett,hogyazonnalihelyreállítástbiztosítanak,mégahibabekövetkezése
után is képesek eleget tenni késleltetési kényszereknek, mégpedig alasony er®forrás
igény mellett.
Tehát az új tehnológiai trendeknek (teljesen átlátszó optikai hálózatok, SDN)
megfelel® hálózati képességekkel rendelkez® hálózatokban javaslok olyan új módsze-
reket, amelyek er®forrás takarékos módon képesek robusztus azonnali helyreállítást
biztosítani, valamintmegfelelni különböz® késleltetési kényszereknek még a hiba be-
következése után is. A tehnológiábóladódókényszerek a következ®ek:
v a
a
(a)Továbbítás
v a
a
a
(b)Összevonás
v
a a
a
() Osztás
v a
b
a + b
(d) Hálózatikódo-
lás
1. ábra. Alapvet® somóponti szerepek, melyekbe az összeköttetés által használt
valamennyi
v
somópont besorolhatóhatóan a jöv®ben sem fog változni. Vagyis a felhasználói adat nem bontható
tetsz®leges számú részre [J1℄.
Ahálózatbelsejébensakegyszer¶m¶veletekvégrehajtásáravanlehet®ség[J1℄.
Ilyenegyszer¶m¶veletaXOR(ExlusiveOR),amelymártisztánoptikaimódon
is megvalósítható[20℄. Az 1. ábrán láthatóak a somóponti képességek, vagyis
aklasszikus somópontiképességek mellettazosztás,összevonás ésazegyszer¶
kombináió(hálózatikódolás) m¶velete ismegengedett.
Azértekezésels®részébenegyúj,rendkívüler®forrás-hatékonyésagyakorlatbanmeg-
valósíthatóegyszeres linkhibaellenállómódszertmutatokbe,azúgynezevzettSurviv-
ableRoutingwithDiversityCoding-ot(SRDC).Amódszerkönnyentelepíthet®,mivel
a a kódolás a forrás és a él somópontokban elvégezhet®, azaz nins szükség a so-
móponti képességek frissítésére. Az SRDC több alproblémáját vizsgáltam, a hálózat
kapaitása és asomóponti képességek függvényében. A többszörös hibák védelmére
aSurvivableRoutingwithNetworkCoding(SRNC)kerültbevezetésre. Számoskuta-
tás foglalkozikaQoS ésadiereniáliskésleltetést (DD)gyelembevev®megbízható
útvonalválasztás kérdésével a transzport hálózatokban, azonban mindegyik munka a
diszjunkt utak kérdését veszi szemügyre. Disszertáiómban ezen eredményeket álta-
lánosítom az irányított körmentes gráf (DAG - Direted Ayli Graph) struktúrát
használó diverzitás kódolás alapú megbízható útvonalválasztási módszerekre. Ehhez
meghatározom a DAG-ok meghibásodás el®tti és utáni késleltetését, ezután pedig
megvizsgálom aQoS ésa DDtudatos útvonalválasztáskésleltetési kényszereinek ha-
tását az azonnali helyreállítást biztosítóoptimális megbízható útvonalakra. Disszer-
táióm másodikfelében a hibalokalizáiókérdésével foglalkozom. Javaslok egy olyan
új lokális hiba monitorozó keretrendszert, amely lehet®vé teszi az igen gyors helyre-
állítást megosztott védelmi módszerek esetén is. Illetve bevezetek egy új konepiót
is, atiltott linkpárok fogalmát, amelynek segítségével általánosítoktöbb monitorozó
útalapú problémát.
Kiemelend®,hogyamegosztottvédelmimódszerektermészetéb®ladódóanekkoris
szükség van az optikai kapsolók (OXC) újrakongurálására, vagyis ezen módszerek
semmilyen esetben sem lesznek robusztusak, viszont igensak er®forrástakarékosnak
bizonyulnak.
Atézisekbenjavasoltmódszerekjellemz®itéshelyességétbonyolultságelméletiésgráf-
elméletieredményeket felhasználva igazoltam,vagyisanalitikus módszerekkel.
Az általam javasolt eljárásokat a LEMON [3℄ hálózatioptimalizáiós
C + +
osz-tálykönyvtár segítségével implementáltam. Ezáltal szimuláiókkal igazoltam a mód-
szerekhelyességétéshatékonyságát, összehasonlítvaazokatazirodalombankorábban
javasoltmódszerekkel.AzNP-teljeskomplexitásúproblémákoptimálismegoldásához
- az irodalomban általánosan elfogadottak alapján -, egészérték¶ lineáris programo-
kat (ILP - Integer Linear Programming)fogalmaztammeg. Ehhez a GUROBI [2℄és
CPLEX [1℄solverek segítségét vettem igénybe.
4. Új eredmények
Atelekommunikáióshálózatokbanamegbízhatóság-vagyisahálózatmagasrendel-
kezésre állása - az alasony késleltetés mellett az egyik legfontosabb kérdés. Termé-
szetesen ahhoz, hogy a kérdéssel érdemben foglalkozni tudjunk, modelleznünk kell a
valóságot. Ennek érdekében, az adott hálózatot egy
G = (V, E )
irányítottgráf segít-ségével reprezentáljuk, ahol a somópontok a hálózatisomópontokatjelölik, mígaz
élek a kommunikáióra alkalmas satornát. A hibák modellezésére számos módszer
létezik. Értekezésemben az irodalomban legelterjedtebb, az úgynevezett közös ko-
kázatú soportok (Shared Risk Link Group, SRLG) [34℄ módszerét használom. Ez a
módszerazegymástólnemfüggetlenmeghibásodásokatiskit¶n®enkezeli.EgySRLG
képeskifejezniastatisztikaiösszefüggéseketabennefoglaltlinkekközött,tehátképes
gyelembe venni a zikai és a logikai topológia közötti összefüggéseket. Egy SRLG
tetsz®leges számú linket tartalmazhat, illetve minden link tetsz®leges számú SRLG-
ben szerepelhet [23℄. Maguk az SRLG-k, amelyek lényegében azt fejezik ki, hogy az
egyes események milyen linkek kiesésével járnak,statikus informáiónakszámítanak.
A továbbiakban azegy adott szenárióhoz(például egy adott QoS szinthez) tartozó
hibalistát
F
-el jelölöm. Mivel az átviteli hálózatok elemeinek igen magas min®ségikövetelményeknek kellmegfelelniük,ezért ezekben ahálózatokban igenritkánfordul-
nak el® egyszerre független hibák (más néven többszörös hibák). Vagyis gyakorlati
tos [13℄.Ezért értekezésemben isf®kéntezenmeghibásodások azonnalihelyreállítását
és lokalizáiójátvizsgálom.
4.1. Azonnali helyreállítás átviteli hálózatokban
Az átvitelihálózatoknál aszállított (Tbyte/se) adatmennyiségekmiatt a kiesések a
legritkábbesetben megengedettek. Anagyzikaitávolságok miattviszontezen háló-
zatok igenishajlamosakakülönféle meghibásodásokra,linkhibákra.Ezértezekben a
hálózatokbanmár régótahasználunk különböz® védelmi megoldásokat[16℄.Agerin-
hálózatok védelme esetén három fontos aspektust kell gyelembe vennünk, ezeknek
azépp megfelel®vagynemmegfelel®kombináiójahatározzamegegyvédelmimegol-
dás hatékonyságát. Aháromaspektus akövetkez®:ahelyreállításiid®, akomplexitás
(mindaszámításikomplexitás,mindavédelemáltalvédetthibák komplexitása-tet-
sz®legessége-szerepetjátszik),ésavédelmimegoldásmiatt lefoglaltextrakapaitás,
vagyis azer®forrás menedzsment.
Joggalmerülfelakérdés,hogyaháromszempontközül melyikisalegfontosabb?
Ehhez érdemes a gyakorlatot megvizsgálnunk.
Jelenleg továbbra is a hozzárendelt védelmek saládjába tartozóúgynevezett
1 + + 1
[7℄védelema legelterjedtebb, melynek lényege, hogy mindenösszeköttetés igény adatát két diszjunkt útvonalon egyszerre szállítjuk, vagyis egyrészt az üzemin, mígmásrészt a védelmi útvonalon is továbbítjuk ugyanazon felhasználói adatokat. Így
az üzemi út meghibásodása esetén a nyel® átkapsol a védelmi útvonalra, azonnali
helyreállítástbiztosítva(vagyis a helyreállításiid® kevesebb, mint 50ms). Természe-
tesen a kapaitásfoglalás az els®dleges igénynek legalább a kétszerese, ami az
1 + 1
Ahilles sarka. Valamint az
1 + 1
sak egyszeres hibák védelmére alkalmas és sakegyetlenegy költség paramétert vesz gyelembe. Vagyis az újonnan felmerül® komp-
lexQoS (Quality ofServie)igényekneknem képes elegettenni.Viszontigazi el®nye,
hogyegyszer¶ robusztus módon azonnalihelyreállítást biztosít,ez pedig máigavezet®
védelmimódszerré teszi az
1 + 1
védelmet, pazarló er®forrás igénye ellenére[7℄.Természetesen léteznek olyan védelmi módszerek is, amelyek a hálózati er®for-
rásokkal igen gazdaságosan bánnak, ilyenek a megosztott védelmi módszerek [9,10℄.
pedig olyan üzemi útvonalak, amelyek a hiba szempontjából egymástól függetlenek.
Ilyenkor tehát ahiba esetén egyszerre legfeljebb egy felhasználó(vagyisérintett üze-
mi útvonal) szeretné használni a megosztott védelmi er®forrásokat. Ezen módszerek
hátránya,hogy(amegosztásmértékét®lfügg®en) azútvonalak meghatározásakomp-
lexfeladat. Továbbáahiba bekövetkezése utánjelzésüzenetek küldésére vanszükség,
mivel a meghibásodott üzemi útvonaltól függ®en más és más somópontoknak kella
védelmiútvonalakat,kapaitásokathasználnia. Ezen üzenetek küldése természetesen
id®igényes, így azazonnalihelyreállítássemmiképpen sem garantált, amigerinháló-
zatok esetén követelmény. Így ezek a módszerek bonyolultságuk és lassúságuk miatt
még nem jelentenek konkureniát az
1 + 1
számára.Természetesen az
1 + 1
nem az egyetlen hozzárendelt védelmi megoldás. Sok ku- tatás foglalkozott azzal, hogy a (hozzárendelt) védelmet hogyan lehet hatékonyankiterjeszteni több link- vagy somópont hibára is. Ez különösen abban az esetben
nehéz kérdés, amikor a hálózat ritka [C2℄. Ezen nehéz feladat megoldására javasol-
ták aGDP-t [J1℄ (GeneralDediated Protetion)is, amelyhasonlóan az
1 + 1
-hez afelhasználóiadatokattöbb útvonalon szállítja. De az
1 + 1
-gyelellentétben ezek nem végponttól végpontig terjed® útvonalak, hanem útvonal szegmensek. Ezen módszerképesbármelytetsz®legesvédhet®
F
hiba(SRLG)listavédelmére,azonnalihelyreállí- tástgarantálva.Védhet®alattittazokatahibákatértjük,amelyekesetében ahálózatösszefügg®maradésazigények elvezetésére (üzemiésvédelmiútvonal létrehozására)
egyaránt elegend® kapaitás állrendelkezésre.
Ha a folyamok osztása nem megengedett, akkor az úgynevezett GDP-R (Gene-
ralDediated Protetion with Routing)problémárólbeszélünk,amelynek megoldása
er®forrás-igényesésNP-teljes [J1℄.Abbanazesetben,hamegengedjükafolyamokosz-
tását éshálózatikódolást [J1℄isalkalmazunk,egy olyanmódszert kapunk, amelynek
akapaitásfoglalásaazösszes hozzárendelt védelemközül alegalasonyabb, ráadásul
ezen probléma polinom id®ben megoldható.
4.1. Deníió. Hálózati kódolásról akkor beszélünk, amikor a hálózat közbüls® so-
mópontjaiban is megengedett az adatok kódolása (kombinálása) [24℄ [25℄.
Ekkor a hálózati somópontok nemsak az adatok továbbítására, átirányítására
képesek, hanem bizonyos m¶veleteketis képesek végrehajtani azokon. Így a kimenet
kai függvényeként képzelhet® el.A élsomópontnak természetesen vissza kelltudnia
kódolni azadatfolyamokatahhoz, hogyvisszanyerje az eredetiinformáiókat.A gya-
korlatban ez a módszer nem implementálható,mivelaz adatok tetsz®leges osztásának
engedélyezése nem oldható meg, valamint azok a bonyolult aritmetikai m¶veletek,
amelyekszükségesek ahálózatikódolás kivitelezéséhez, még nem valósíthatókmeg az
optikai rétegben. De mivel ez a módszer elméleti alsó korlát kapaitásfoglalás szem-
pontjából,ígyigenjólhasználhatóamódszerekhatékonyságánakkiértékelésénél.Fon-
toskiemelni,hogyahálózatikódolástalkalmazómódszerekeseténakimenetrészeegy
megbízható routing
R = (V R , E R , f )
, amely tartalmazza a megoldásban szepl®, so- mópontokat,éleket, illetve az ahhoz rendelt folyamértékeket, valamintegy robusztuskonguráió
C
, amely megadja az optikaisomópontok (OXC) beállításait. Az ilyen beállítási informáiók közé tartoznak akapsoló mátrixok, jelek összevonása, esetlega hálózatikódoláshozszükséges informáiók.
Adisszertáiómbanamegbízhatóroutingfeladatproblémájávalfoglalkozom.Fon-
tos, hogyazáltalambemutatottmódszerekhez amegbízható routingalapjánkinyer-
het® a robusztus konguráió
C
már ismert módszerek [27,28℄ segítségével.1. Tézis. [C1,C2,J1℄ Javasoltam egy új, hálózati kódolás alapú azonnali helyreállí-
tástbiztosító,robusztusmódszert,vagyisazSRNC-t(SurvivableRoutingwithNetwork
Coding).Megmutattam,hogyáltalánoshibalista(
F
)esténa feladatNP-teljes komple-xitású,bármelyadottszámúosztásesetén.Ezekalapjánegészérték¶lineárisprogramot
javasoltam ezen probléma megoldására. Az egyszeres linkhibák esetére javasoltam egy
új, robusztus azonnali helyreállítást biztosító módszert, az SRDC-t (Survivable Rou-
tingwithDiversity Coding).Az SRDC-tkapaitásés somópontikényszerekmellettis
vizsgáltam(lásd 2. táblázat). Aproblémák megoldásárajavasoltam ILP-tés többheu-
risztikát is. Valamintbeláttam, hogykapaitáskorlát nélküli esetben (ICAN és ICCN)
ezen problémának az
1 + 1
a 4/3-os approximáiója. Továbbá beláttam, hogy a ka- paitáskorlátos esetet (ICAN és ICCN) az1 + 1
nem approximálja. A somóponti kényszeres esetre (ICCN) egyapproximáiósalgoritmust adtam (SRDC-IC).A feladat bemenetét képezi a dinamikus összeköttetés igény érkezésének pillana-
tában a hálózat aktuális állapotát leíró irányított gráf:
G = (V, E )
, ahol mindene ∈ E
élhez adott:egynemnegatív költségfüggvény (c : E → R +
),azaktuálisszabadkapaitás (
k : E → R +
), valamintaz adott linkhez tartozókésleltetés (d : E → R +
).Az összeköttetés igény
C = (s, t, b, D)
,amelytartalmazza:aforrást (s
) ésnyel®t (t
),azigényeltsávszélességet (
b ∈ N
)tetsz®leges egységben megadva.Valamintabbanaz esetben, ha az összeköttetésnek valamilyen késleltetés kényszert is teljesítenie kell, akésleltetési küszöböt (
D
). Továbbá a probléma bemenetét képezi a védeni szükségeshibák listája (SRLG-k:
F
) is, amely segítségével általános esetben minden hibához (SRLG-hez - hibamintához) tartozik egy∀f ∈ F : G f = (V, E f )
segédgráf (E f
él-halmaztaz
f
hibamintában megadott meghibásodott élek törlésével nyerjükE
-b®l).Feltételezzük, hogy valamennyi SRLG az
F
listában védhet®, azaz mindenG f
gráfs − d
összefügg®. Fontos,hogyezen segédgráfoklétrehozásaáltalánoshibalistaesetén szükséges, mígabbanazesetben, haegyszeres hibákatfeltételezünk egyéb segédgáfokhasználata a élszer¶. Itt fontos leszögezni, hogy míg általános hibamodell esetén a
hálózat belsejében isszükség lehet hálózati kódolásra (természetesen ekkor
C
tartal-mazza amegfelel® informáiókat), addig egyszeres hiba eseténkizárólag a hálózat
szélén [27,28℄, vagyis aforrásés nyel® somópontban kell hálózatikódolást használ-
ni. Vagyis a kétprobléma mer®ben különbözik egymástól,ezért isvanszükség a két
probléma különálló kezelésére.
4.1.1. Átviteli hálózatok megbízhatósága általános hibamodell esetén
1.1. Tézis (SRNC komplexitás). [C2,J1℄ Bebizonyítottam, hogy az SRNC NP-
teljes komplexitású. Ezen probléma megoldására egészérték¶ lineáris programot java-
soltam.
A bizonyításhoz az osztatlan folyamos GDP, vagyis GDP-R probléma SRNC-re
valóvisszavezetését mutattammeg [C2℄. A bizonyításegy gráfkonstrukión alapszik.
Így,hogybeláttam,hogyazSRNC problémaNP-teljes, azoptimálismegoldáskinye-
résére a szakirodalomban általánosan elfogadott és használt módszert használtam,
vagyis felírtam a megfelel® egészérték¶ lineáris programot. A program végigiterál
mindegyik
∀f ∈ F : G f = (V, E f )
segédgráfon, így gyelembe véve az adott tetsz®- leges hibalistát, közben egy segédváltozó segítségével beállítva a végleges megoldásköltségeitaz éleken.
Jelölés Leírás
G = (V, E, k, c, d)
a hálózatirányítottgráfmodelljeV
somópont ésE
élhalmazeseténc
az éleken deniáltköltségfüggvénye ∈ E k
azéleken rendelkezésre állószabad kapaitáse ∈ E
d
azadott linkkésleltetésee ∈ E
C = (s, t, b, D)
a dinamikusan érkez® igény forrás- és élsomópontja, sávszélességigénye, valamintkésleltetési kényszereF
a védend® közös kokázatú soportok listájaG f = (V, E f )
azadottf ∈ F
soportban meghibásodott élektörlésével nyert SRLGgráf
R = (V R , E R , f )
azösszeköttetés megbízható routingjaV R ⊆ V
somópont, ésE R ⊆ E
élhalmazzal, és∀e ∈ E R : f(e) ≤ k(e)
folyamértékekkelC
a somópontok konguráiójaA, B
a kétadatrészlet,amire afelhasználóifolyamot osztjuk
A ⊕ B
XORm¶velettel azs
ben létrehozott redundáns adatrészletE A , E B , E A⊕B
routingDAGokA
,B
ésA ⊕ B
számára4 4.5 5 5.5 6 6.5 7 7.5
10 15 20 25 30 35
averageapaity
#
nodes1 + 1
GDP-R
DC
SRNC
Lower bound
(a) Egyszereslinkhibák(fokszám
3 . 2
)4 4.5 5 5.5 6 6.5 7 7.5
10 15 20 25 30 35
averageapaity
#
nodes1 + 1
GDP-R
DC
SRNC
Lower bound
(b) Többszöröslinkhibák(fokszám
3 . 2
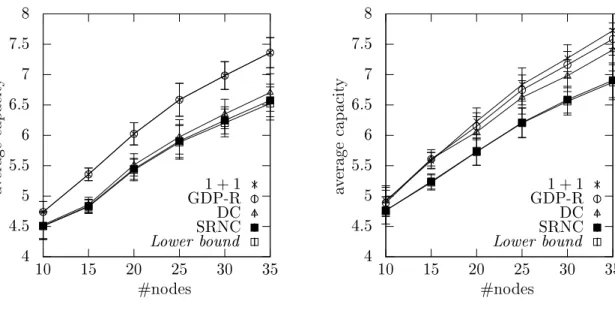
)2. ábra. Átlagos kapaitás foglalásakülönböz® hibalistákés hálózatokesetén. [J1℄
Természetesen az ILP minimalizál egy adott költségfüggvényt, vagyis egy olyan
megoldást keresünk, ahol minimalizáljuk azösszeköttetés számára lefoglalter®forrá-
sokat:
min X
∀e∈E
c(e) · b(e)
b · 2
. (2)ahol
b(e)/2 ≤ k(e)
a megoldásban használt sávszélesség aze ∈ E
linken. A kett®velvaló osztásra azért van szükség, mivel az adatokat két részre (
A
ésB
-re) bontottukés ezeket (külön) vezetjük el.
Az alkalmazottjelöléseket az1. táblázattartalmazza.
Kiemelend®, hogy szimuláiós eredmények segítségével megmutattam, hogy az
adatokkétrészrevalóosztásaeseténisnagyonjólmeglehetközelíteniazelméletialsó
korlátot(az ábránLower bound),vagyisa tetsz®leges osztástengedélyez® és hálózati
kódolást alkalmazóGDP-t (2ábra).
4.1.2. Átviteli hálózatok megbízhatósága egyszeres hibák esetén
A hibák túlnyomó része (több, mint 70% [13℄) egyszeres hiba, ezért a jelenlegi há-
lózatok jellemz®en vagy védelem nélkül, vagy egyszeres hiba elleni védelem mellett
1 + 1
s 1 t 1
AB
AB
DCs 2 t 2
A
B
A ⊕ B
SRDCs 3
a
A ⊕ B A b
c
B A A
t 3 A(A ⊕ B)
AB
3.ábra. A különböz® azonnalihelyreállítástnyújtó védelmimódszerek illusztráiója.
A dupla éleka teljesigényt továbbítják, mígasima élek annak felét [J3℄.
üzemelnek. Az egyszeres hibák védelmére az
1 + 1
mellett az úgynevezett Diversity Coding (DC
) [26℄ a legjobbjelölt. ADC
lényege, hogy 3 független útvonalon küldiafelhasználóiadatokat,mégpedig olymódon, hogyazegyik útvonalonazadat egyik
felét(jelöljükezt továbbrais
A
-val),amásikonamásikfelét(jelöljük eztB
-vel), míga harmadikon a két adatrész kizáró vagy-ját (
A ⊕ B
). A módszer az1 + 1
er®forráspazarlását képes sökkenteni, amellett, hogy továbbra is robusztus módon azonnali
helyreállítást biztosít [7℄. A
DC
hátránya, hogy nagy összefügg®séget követel meg (3-szorosanösszefügg®hálózatokbanhatékony),amireavalóshálózatokeseténritkánvan példa. A különböz® módszerek struktúrájának szemléltetésea 3.ábrán látható.
A[27℄[28℄ isazegyszeres hibákvédelménekproblémájátjártakörül.Bemutatásra
került, hogy abban az esetben, ha a felhasználói adatfolyamkét részre valóosztását
engedjükmegéshálózatikódolástalkalmazunk,azoptimális(költséghatékony)robusz-
tus kódoláshárom,úgynevezettkódolóDAG(DiretedAyliGraphs)megtalálására
vezethet®vissza[27℄.Viszontaroutinggráf(megbízhatórouting)megtalálásanyitott
kérdés maradt.Ezzel a kérdéssel a [C1℄ ikkben foglalkoztunk.
Több lehetséges feladat létezik, összesen négy, annak függvényében, hogya háló-
zatbanvannak-ekapaitáskorlátok,illetve,hogymelysomópontokképesek azosztás
ésösszevonásm¶veletére(2.táblázat).Bebizonyítottuk, hogyabbanazesetben,haa
linkekenninsenkapaitáskorlát,valamintazosztó ésösszevonó somópontoktetsz®-
legesek lehetnek (ICAN), a probléma polinom id®ben megoldható (SRDC-IA), míg
kapaitáskorlátosesetben (CCAN) ez még nyitottkérdés. Valamint azis bizonyítást
nyert, hogy ha az osztásra és összevonásra sak el®re meghatározott somópontok
képesek (CCCN), akkor a probléma NP-teljes. A különböz® feladatokat, az azokra
javasolt megoldásokat és azok komplexitását a 2 táblázat foglalja össze, ahol
P
alehetéses osztó, míg
M
a lehetséges összevonó somópontok halmazát jelöli. A fel-adatokrólb®vebben:
ICAN(InnteCapaityandAllNodeapabilities):Ebben azesetben ninssem
kapaitás-, sem somóponti korlátozás. A kapaitás végtelensége annyit tesz,
hogy minden linken rendelkezésre áll az igénynek megfelel® szabad kapaitás.
Valamint minden somópont képes a folyam összevonás és osztás m¶veletére.
Ez egyolyanesetnek felel meg amikor a hálózatnem túlterhelt és minden so-
mópontban a somóponti képességek frissítésre kerültek, vagyis az összes so-
mópontban megtörtént amegfelel® eszközsere, illetve/vagyszoftverfrissítés.
ICCN(Innte Capaity andConstrained Node apabilities): Ebben azesetben
továbbrasinsenekkapaitáskorlátok,desomópontikorlátozásmár van,vagy-
is nem minden somópont képes a folyam összevonás és osztás m¶veletére. Ez
egy olyan esetnek felel meg, amikor a hálózat nem túlterhelt de nem minden
somópontban történt meg a somóponti képességek frissítése, vagyis nem az
összessomópontbantörténtmegamegfelel®eszközsere, illetve/vagyszoftver-
frissítés.Ilyen eset akkorfordulhatel®, haaszolgáltatófokozatosan térátazúj
tehnológiára (inremental deployment).
CCAN (Constrained Capaity and All Node apabilities): Ebben az esetben
kapaitás korlátok vannak a hálózatban, de somóponti korlátozások ninse-
nek, vagyis mindensomópontképes afolyamösszevonás ésosztás m¶veletére.
Ekkor a hálózattúlterhelt, de minden somópontban a somóponti képességek
frissítésre kerültek.
CCCN (Constrained Capaity and Constrained Node apabilities): Ebben az
esetben mindkapaitás-,mindsomópontikorlátokvannakahálózatban.Tehát
a hálózat túlterhelt és nem minden somópontban történt meg a somóponti
képességek frissítése.
Érdemes kiemelni, hogy a kapaitás korlát és somópont kényszer nélküli eset-
re (ICAN) adott polinom idej¶ algoritmus kapaitás korlátos esetben (CCAN) nem
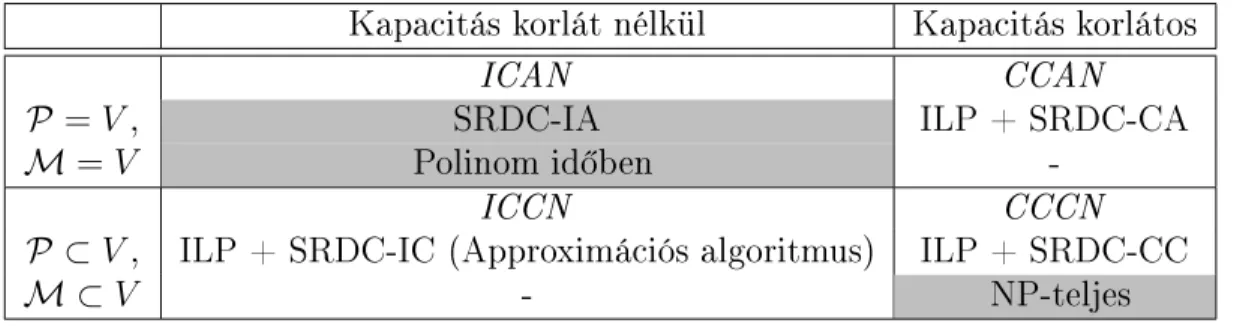
2.táblázat. SRDCösszefoglalótáblázat.Azosztókhalmazát
P
-vel,mígazösszevonókhalmazát
M
jelöltük. A szürke hátter¶ eredmények már a szakirodalomban létez®eredmények [C1℄, míg a fehér hátter¶ eredmények az új, a disszertáióban tárgyalt
eredmények.
Kapaitás korlát nélkül Kapaitás korlátos
ICAN CCAN
P = V
, SRDC-IA ILP +SRDC-CAM = V
Polinomid®ben -ICCN CCCN
P ⊂ V
, ILP +SRDC-IC (Approximáiós algoritmus) ILP + SRDC-CCM ⊂ V
- NP-teljeshasználható,mivelavirtuálisélek,vagyisadiszjunktútpárokathelyettesít®élek(úgy-
nevezett szigetek) visszamappelése az eredetiélekre nem egyértelm¶en kivitelezhet®.
Abban az esetben, ha ninsenek kapaitás korlátok, de nem mindegyik somópont
lehet osztó és összevonó (ICCN), akkor sem ad optimálismegoldást azSRDC-IA.
Az ICCNfeladatra egyapproximáiósalgoritmustadok, vagyisaSRDC-IC-t. Az
algorimus igen hasonló a [C1℄-ben bemutatott SRDC-IA-hoz, de nem minden so-
mópontközé rakunk virtuáliséleket, hanemsak azon asomópontokközé, amelyek
lehetnekosztók,illetveösszevonók.AzSRDC-ICviszontnemadoptimáliseredményt,
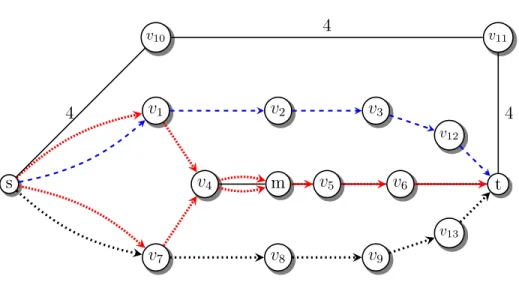
erreláthatóegypéldaa4.ábrán:
m
-meljelöljükaztasomópontotamelylehetössze-vonó (aforrásés nyel®somópontonkívül). Ebben apéldában, ha
DC
-thasználunk, amelyhárom független utat keres, akkor a megoldásösszköltsége 22 egység (szagga-tott(5),pontozott(5)útésa
s −v 10 −v 11 −t
(12)).Abbanazesetben,haazSRDC-ICalgoritmust használjuk az
1 + 1
-gyelazonos megoldástkapunk, vagyis20(szaggatott (2 · 5
)és pontozott (2 · 5
)) utakonkét egység átvitele). Az optimálismegoldás pedig19(szaggatott(5), pontozott(5) úts¶r¶npontozott(9)),ahogy ez azábránislátha-
tó. Érdekesség, hogy ekkor a
v 4
és azm
somópontok között érdemes két egységnyikapaitást foglalni annak érdekében, hogy eljussunk az összevonó somópontig. Te-
hát látszik, hogyazSRDC-IC ebben azesetben nem adoptimálismegoldást,viszont
approximálja azt, ahogyanaz
1 + 1
is.v 3
v 1
s
v 7
v 2
m
v 8
v 4
v 9
t
v 12
v 13
v 5 v 6
v 10 v 11
4
4
4
4. ábra. SRDC-IA és DC korlátainak illusztráiója ICCN esetén. A forrás és nyel®
somóponton kívül
m
lehet a lehetségesosztó vagyösszevonó. Az élköltségek egység- nyiek, kivéve ha az élen más szerepel. A három optimálisrouting DAG összköltsége19.
1.2. Tézis (SRDC Egészérték¶ programok). [C1℄ A CCAN problémájára ja-
vasoltam egy gyors futást biztosító ILP-t. Valamint kiterjesztettem ezen ILP-t a so-
móponti kényszeres esetre (CCCN).
Természetesen aCCCN ILPfutásiidejelényegesen hosszabb,mivelasomóponti
kényszereket isgyelembe kellvenni.
1.3. Tézis (SRDC heurisztikák). [C1℄ Javasoltam két heurisztikát, az SRDC-
CA-t amely a CCAN problémára minden esetben megengedett megoldást szolgáltat
(ha létezik). Továbbá, a SRDC-CC-t amely gyorsan és igen hatékony módon szolgál-
tat megoldást a legtöbb gyakorlati problémára.
Tehát az SRDC-CA heurisztika minden esetben megoldást ad (amennyiben lé-
tezik megoldás), de abban az esetben viszont, ha somóponti kényszerek is vannak
a hálózatban (CCCN), ezen heurisztika már nem elégséges, hanem az SRDC-CC-t
kell alkalmazni. Az SRDC-CC nem garantál minden esetben megoldást (mivel en-
nek eldöntése már magában NP-teljes feladat), de igen nagy valószín¶séggel kiváló
bizonyítottállítás, miszerintaz úgynevezett redukáltkapaitású gráfban aháromér-
ték¶folyammegtalálásaegy,azegyszeres hibáknakellenálló gráfotfogalkotni.Tehát
bármelyik linkhibájaesetén a gráfbankét érték¶ folyamátvihet®(ebben az esetben
azegy érték¶ folyama felhasználóiadat felének felelmeg).
Az SRDC-CA herusztika futása során egy minimális költség¶ három érték¶ fo-
lyamot keresünk, egy speiális redukáltkapaitású gráfban
G rs = (V, E, c, c ¯ s )
.G rs =
= (V, E, c ¯ s , c s )
pedig egy olyan gráf, ahol a redukált kapaitású gráfot[28℄ alakítjukmultigráá.Vagyisazon élek mellé,amelyeken aredukált kapaitás1.5 (
∀e ∈ E
ahol¯
c(e) == 1.5
), kihúzunk még egy párhuzamos élt, mégpedig olyan módon, hogy azeredetiél
e r
kapaitását egyre sökkentjük (c(e ¯ r ) = 1
),azúj élneke n
pediga kapai-tását félegységre állítjuk(
¯ c(e n ) = 0.5
).Mindeközben azeredetiél,vagyise r
költségeazeredetimarad vagyis
c(e r )
, mígazújél költsége azeredetköltség konstansszorosa lesz:c(e n ) · α
.Fontos, hogy
α
a hálózat s¶r¶ségét®l függ® költség paraméter. Vagyis a hálózati topológiaazontulajdonságátveszi gyelembe,hogys¶r¶hálózatokesetén nagyobbavalószín¶ségeannak,hogy3függetlenútvanahálózatban(
DC
-hezhasonlóoptimálismegoldás),mígritkahálózatokeseténennekvalószín¶ségealasonyabb(
1 + 1
-hez ha-sonlómegoldás).Természetesen amegoldásnéhaa
DC
vagyaz1 + 1
megoldásátadjavissza (vagyis ezek tekinthet®k a két végletnek), éppen annak függvényében, hogy
melyik a költség vagyis er®forrás hatékonyabb. De az igazán értékes, újat nyújtó és
kapaitás-hatékony megoldásokazok, amelyek esetén a
DC
tulajdonságaitki tudjuk b®víteni a kétszeresen összefügg® gráfokra is. A SRDC-CA megoldása tehát egy, ahárom DAG-ot tartalmazó optimális routing gráf, és nem két vagy három független
útpár, mint a
DC
és1 + 1
esetén. A SRDC-CA heurisztika skálázható és gyors le- futási idej¶, így nagy hálózatok esetén használata igen el®nyös lehet. A heurisztikahatékonyságátszimuláiókkaligazoltam[C1℄(lásd5.ábra).Ahogymáraztemlítettem
korábban is, abbanazesetben, ha azosztó- ésösszevonó somópontoknem lehetnek
tetsz®legesek, a probléma tovább nehezedik. Az ICCN probléma komplexitása még
nyitottkérdés, de aCCCN bizonyítottanNP-teljes[C1℄. Ezen SRDC-CC heurisztika
is a [28℄-ban deniált redukált kapaitású gráfra épül. Viszont nem három folya-
mot keresünk a hálózatban, hanem három utat, mégpedig 2 lépésben. A heurisztika
lehet. A heurisztika hatékonyságát szimuláiókkal igazoltam, amelyek során az igen
jó eredményeket produkált (lásd 5.ábra).
A megbízható routingok kinyerése mellett továbbá foglalkoztam annak approxi-
málhatoságával. Tudjuk, hogy az adatok két részre való osztása esetén az
1 + 1
2-approximáiója a megbízható routing problémának [6℄. Beláttam, hogy a kapaitás
korlát nélküli esetnek az
1 + 1
a 4/3-os approximáiója.1.4. Tézis (SRDC approximáió). Bebizonyítottam,hogyaz
1+1
akapaitáskor-lát nélküli eseteknek a 4/3-os approximáiója. Valamint megmutattam egy gráfkonst-
rukió segítségével, hogy kapaitás korlátos esetben nem approximálja az
1 + 1
-et,vagyis a kapaitás foglalása közötti különbség tetsz®legesen nagy lehet. Az ICCN eset-
re javasoltam egy
4/3
-os approximáiósalgoritmust.A bizonyítás arra épül, hogy az ICAN polinom idej¶ algoritmusa három út meg-
találására vezethet® vissza egy segédgráfban. Ennek segítségével az
1 + 1
(2 útja)és a SRDC-IA (3 útja) között fennálló egyenl®tlenségek segítségével algebrai úton
láttam be, hogy az
1 + 1
az SRDC-ICAN problémának a 4/3-os approximáiója. A kapaitás korlátos esetnél (CCAN) egy gráfkonstrukióval szemléltettem, hogy nemapproximálja azt, vagyis, abban az esetben, ha van kapaitás korlát a hálózatban,
akkor konstruálható olyan gráf, amely esetén az SRDC tetsz®legesen jobban teljesít
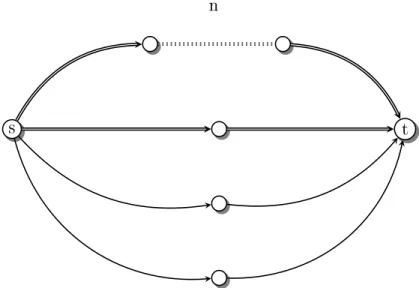
(lásd 6. ábra). Figyeljük meg, hogy az
1 + 1
sak a dupla éleket használhatja, mivel ott vanelegend® kapaitás, míga SRDC-CCAN használhatja az egységnyi kapaitá-sú éleket is. Így egy olyan gráfot kapunk, amelynél az
n
élszámtól függ®en az1 + 1
költsége4+n, mígaz SRDC-CCAN költsége 6egység.
4.2. Azonnali helyreállítás biztosítása késleltetési kényszerek
mellett egyszeres linkhibák esetén
Azutóbbiid®benazújalkalmazásoknak(pl.távsebészet,t®zsde,VoIP,stb)köszönhe-
t®enegyrejobbanreektorfénybekerültakésleltetéskérdéseazátvitelihálózatokban,
mivel ezen új alkalmazásoknem saknagyfokú rendelkezésre állást és rugalmasságot
követelnek meg, de igensak késleltetés érzékenyek is. Ezen új követelmények a szol-
gáltatókatigen nagy kihívások eléállítják.
4 5 6 7 8 9
10 15 20 25 30 35 40
averageapaity
#
nodes1 + 1
Lower bound
ILP
ILP(10)
SRDC-IC(10)
SRDC-CC(10)
(a) Ritka hálózatok kapaitás foglalása somó-
pontikényszerekmellett
2.5 3 3.5 4 4.5 5 5.5 6
10 15 20 25 30 35 40
averageapaity
#
nodes1 + 1
Lower bound
ILP
ILP(10)
SRDC-IC(10)
SRDC-CC(10)
(b) S¶r¶ hálózatok kapaitás foglalása somó-
pontikényszerekmellett
5.ábra. Szimuláióseredményekvégtelenkapaitáséssomópontikényszerekmellett.
A somópontok 10% képesaz osztás ésösszevonás m¶veletére.
s
t n
6. ábra. CCAN approximálhatóságának ellenpéldája. Az
1 + 1
sak a dupla élekethasználhatja, míg az SRDC-IA bármely élt. Így az
n
(élek számának) növelésével a kétmegoldásközötti költségkülönbség tetsz®legesen növelhet®.azonnali helyreállítást biztosítani, hanem egyben különböz® késleltetési kényszereknek
is képes megfelelni a hiba bekövetkezése után is. Ehhez a kapaitás korlát és so-
mópont kényszerek nélküli SRDC (ICAN) késleltetés kényszerekkel való kib®vítését
vizsgáltam.Ezen új probléma a Delay Aware Routingwith Coding vagyis a DARC.
Ezenmódszerhasonlóanaz
SRDC
-hezésDC
-hezafelhasználóiadatokattöbbút- vonalon(vagyDAG-on)keresztüljuttatjaelanyel®höz.Ezértazels®lépésatöbbutasforgalomirányítás, vagyis a multipath routinggal kapsolatos késleltetési problémák
vizsgálta volt.Ezen problémát már több hálózati rétegben igen alaposan vizsgálták,
mivel a többutas forgalomirányítás igazi lehet®séget nyújt a megfelel® szolgáltatási
szint, vagyis Quality-of-Servie (QoS) megteremtéséhez. A több diszjunkt út által
nagyobb átviteli kapaitás és könnyebb forgalom menedzsment valósítható meg, a
megbízhatóság biztosítása mellett.
A mulitpathroutingesetén kétf® problémakör kapsolódika késleltetéshez[15℄:
Az úgynevezett QoS (Quality of Servie) routing: ekkor a él az utak, vagy
azok összegének egy bizonyos késleltetési küszöb alatt való tartása, miközben
azutak költségétminimalizáljuk.Ezen probléma már egyetlen egy útesetén is
NP-teljes[8℄. Eme probléma egy bizonyosQoS szinttartásához köthet®,vagyis
például, hogyatávsebészeti beavatkozás során ne legyen nagya késleletetés az
orvos ésa gép mozgása között.
Diereniál késleltetés kényszeres routing (Dierential Delay Aware Routing):
itt a különböz® utak közötti késleltetés különbségére van megadva egy korlát,
ésemelettkerülaköltségfüggvényminimalizálásra.Ezen problémaisNP-teljes,
s®t egyetlenegy minimális költség¶ út megtalálása, ami kielégít egy maximum
ésminimumkésleltetés küszöbötis,már NP-teljes[29℄.A problémaaszükséges
buer méret problémájára vezethet® vissza, mivel az adatok visszanyeréséig a
gyorsabban beérkezett adatokat (adat részleteket) tárolni kell.
Mivel eddig DAGok esetén a késleltetés nem lett deniálva, ezért ez volt az els®
akadály, amelyet le kellett küzdeni. Ezután kezdhettem el érdemben foglalkozni a
késleltetésikényszeresproblémákbevezetésévelésazokmegoldásával.AroutingDAG-
ok késleltetésének deniálásánálfelhasználtam,hogya routingDAG-ok felbonthatók
késleltetés¶ DAG között, tetsz®leges egyszeres linkhiba esetén (wlog
δ E A ≤ δ E B ≤
≤ δ E A⊕B
).❵ ❵ ❵
❵ ❵ ❵ ❵ ❵ ❵
❵ ❵ ❵ ❵ ❵ ❵
disrupted
in.delay
∅ E A E B E A⊕B
∅ |δ E A − δ E B | |δ E B − min {∆ E A , δ E A⊕B }| |δ E A − min {∆ E B , δ E A⊕B }| |δ E A − δ E B | E A |δ E B − δ E A⊕B |
|∆ E B − δ E A⊕B | |δ E B − ∆ E A⊕B | E B |δ E A − δ E A⊕B | |∆ E A − δ E A⊕B |
|δ E A − ∆ E A⊕B |
E A⊕B |δ E A − δ E B | |∆ E A − δ E B | |δ E A − ∆ E B |
utak és szigetek lánolatává, mégpedig olyan módon, hogy minden egyes sziget sak
egyetlenegykódolóDAG-naklehetarésze(lásd
SRDC
).Fontos,hogyaDARC
-náliselégséges a kódolást, illetve dekódolást a forrás- és nyel® somópontban elvégeznünk.
Tehát a hálózat belsejében ninsen szükség komplex m¶veletek elvégzésére. Így a
módszer nem sakrobusztus, de egyszer¶ is.
2. Tézis. [C3,J2℄Deniáltam aroutingDAG-okkésleltetését.BevezettemaDARC-
QoS (Delay Aware Routing with Coding - Quality of Servie) és DARC-DD (Delay
Aware Routing with Coding - Dierential Delay Aware Routing) problémákat. Be-
láttam, hogy mindkét probléma, vagyis a DARC-QoS és a DARC-DD is NP-teljes.
Továbbá bebizonyítottam, hogy a DARC-DD probléma nem approximálható
n ǫ
-on be-lül bármilyen
ǫ < 1
esetén, Hamilton gráfokban. Felírtam a feladatok megoldásához szükséges ILP-ket és a DARC- DD megoldására adtam két hatékony heurisztikát.Annakérdekében,hogyazilyenváltozásokatkezelnitudjam,mindenegyessziget-
hez kétértéket rendeltem:
hibamentesállapotbanmennyialegkisebbkésleltetésazadottroutingDAG-ban
(
d I min
)ésmeghibásodás eseténmenyivel n®a késleltetés (
∆ I
).MivelmindenegyesroutingDAGutakésszigeteksorozatábóltev®dnek össze,így
a teljeskésleltetést felírhatjuka következ® formában, hibamentes állapotban:
δ E j = X
P ∈P Ej
X
e∈P
d(e) + X
I ∈I Ej
d I min
(3)∆ E j = δ E j + max
I∈I Ej ∆ I
(4)Vagyishibamentes esetben aminimumkésleltetések(utak ésszigetek)összegének
felel meg az adott
E j
routing DAG-hoz tartozó késleltetés, míg hiba esetén azt fel- tételezzük, hogy a legnagyobb késleltetésnövelést okozó sziget esik ki. Fontos, hogymindazILP,mindaheurisztikákegyolyantranszformáltgráfbanfutnak,amelybena
szigeteket virtuálisélek reprezentálják. Vagyiskib®vítjük a [C1℄-ben bemutatottgráf
transzformáiót,tehátlétrehozunkegy
G c d = (V, E, b b c)
irányítottmulti-gráfotE b
élhal-mazzal,ahol
E b
-benszerepelmindene ∈ E
,valamintmindegyik∀(u, v)
somópontpár között hozzáadunk egyúgynevezett virtuálist élt, mégpedigoly módon, hogyezen élköltsége az
u
ésv
közötti minimálisköltség¶ diszjunkt útpár összegének költségével egyenl®(b c(e n ) = cost(u, v)
).Továbbá,mindenegyesélhezhozzárendeljükad I min (e)
és∆ I (e)
értékeket. Természetesen, hanem virtuális élr®l van szó, akkord I min (e) = d(e)
és
∆ I (e) = 0
. Egy ilyen transzformált gráfban a QoS és DD probléma visszavezet- het® utak keresésére. Kiemelend®,hogy mivelezen utakategy transzformált gráfbankellmegtalálni,azeredetifeladatokNP-teljességenemörökl®dik.Ígyezen problémák
komplexitásanyitott kérdés volt.
2.1. Tézis (QoS komplexitás). [C3,J2℄Bebizonyítottam,hogyaDARC-QoSprob-
léma NP-teljes.
Az NP-teljesség bizonyítás a háromfelé osztás problémájára (Three-Way Partit-
ion[8℄) vezethet® vissza, amelyegy ismertNP-teljes probléma.
2.2. Tézis (DD komplexitás). [C3,J2℄Bebizonyítottam,hogy aDARC-DDprob-
léma NP-teljes.
Ezen problémaeseténisbeláttam,hogyNP-teljes,abizonyításegygráfkonstruk-
iósegítségével a leghosszabbút problémára vezethet® vissza [8℄.
Fontos különbség a QoS és DD probléma között, hogy a DD esetén igen szigorú
késleltetés különbségi kényszereknek kell megfelelni. Így a megoldás költsége másod-
lagossá válhat, vagyis egy nem megfelel®en felírt ILP esetén kialakulhatnak függet-
len komponensek, illetve hurkok annak érdekében, hogy ezen késleltetési különbségi
bár szigorúan nézve, a kényszereket kielégíthetik,de a feladat értelmét veszti. Ezért
a független komponensek kiküszöbölésére azILP-ben a feszültség analízismódszerét
használtam, míg a hurkok létrejöttét különböz® folyamkényszerekkel zártam ki. A
DARC-DD esetén a két gyorsabb routing DAG közötti késleltetés különbséget akar-
juk egy bizonyos késleltetési küszöb alatt tartani. Ekkor az összes, a 3. táblázatban
megadott kényszert meg kellvizsgálnunk.
2.3. Tézis (Egészérték¶ programok). [C3,J2℄ Az új, a DAG-okban bevezetett
késleltetés deníiója segítségével, felírtam a feladatok (QoS és DD) megoldásához
szükséges ILP-ket.
2.4. Tézis (Heurisztikák). [C3,J2℄ Az ILP lassabb futási ideje miatt javasoltam
két (költség és késleltetés alapú) gyors heurisztikát, amelyek a SPLIT [11℄ módszert
képessé tették a probléma megoldására.
Az ILP lassú futási idejemiatt javasoltamkét gyors heurisztikát. A módszer els®
lépésea
k
(el®szörk = 3
)éldiszjunktútmegtalálása.Másodiklépéskéntazalgoritmus identikálja azt a közbüls® somópontot, amelyen a legtöbb út áthalad, jelöljük ezta somópontot
v x
-szel. Majd azon utakat, amelyek áthaladnakv x
-en, feldaraboljukszegmensekké (
s − v x
, valamintv x − t
szegmensekké, ahols
a forrást mígt
a nyel®tjelöli). Ezeket a szegmenseket úgy ragasztjuk össze, hogy a legnagyobb késleltetés¶
s − v x
szegmenshez a legkisebb késleltetés¶v x − t
szegmenst rendeljük hozzá. Afelhasznált éleket töröljük, majd visszatérünk a második lépésre mindaddig, amíg
a gráf el nem fogy. Az így kialakult utak halmazából tripleteket hozunk létre és
megvizsgáljuk, hogy azok kielégítik-e a késleltetési kényszereket. Ha igen, akkor ezt
elmentjük a lehetséges megoldásokközé.
A
k
értékét iteratívan növeljük, amíg lehet, vagyis vank
független útpár. Azalgoritmus végén a lehetséges megoldások közül kiválasztjuk a legkisebb költséggel
rendelkez® tripletet. Nefeledjük, hogytermészetesen ez a módszeris atranszformált
gráfon fut.
2.5. Tézis (DD approximálhatóság). [C3,J2℄ Bebizonyítottam, hogy a DARC-
DD probléma nem approximálható
n ǫ
-n belül bármilyenǫ < 1
esetén Hamilton grá-fokban.
tóságáravezethet®vissza Hamiltongráfokban.EztatehnikátSrivastavaishasználja
a[33℄4-Calfejezetben,annakérdekébenhogybelássa,hogyaDDR(DierentialDelay
Routing)nemapproximálható
n ǫ
-nbelülbármilyenǫ < 1
eseténHamiltongráfokban.4.3. Védelmi kapsoláson alapuló hibalokalizáió
Disszertáiómels®részében olyanvédelmimódszereketjavasoltam,amelyekahálóza-
tikódolássegítségévelrobusztusmódon képesek garantálniazazonnalihelyreállítást,
egyszeres éstöbbszöröshibákeseténis.Ezenmódszerekegyrésztmegtartottákaz
1 + +1
jótulajdonságait(robusztus,egyszer¶ésazonnalihelyreállítástbiztosít),másrészt lényegesensökkentették azehhez szükséges er®forrásigényt(persze hozzárendelt vé-delmekr®llévén szó, ezeknek amódszereknek isjelent®s azer®forrásigényük).Annak
érdekében, hogy ezen er®forrásigényt tovább sökkenthessük, amegosztott védelmek
felékellfordulnunk. Eddigamegosztottvédelmeketazalasonyer®forrásigényéslas-
sú helyreállítási id® jellemezte (vagyis azonnali helyreállítást nem biztosítottak), de
a helyreállításiid® sökkentése már régóta kutatási téma. Vegyük észre, hogy míga
robusztus védelmimódszereknél (
1 + 1
,SRDC)t n = t c = t p = 0
, amimiatta helyre-állításiid®
t R < 20 − 30
ms, addigmegosztott,vagyishibafügg®védelmekeseténezen id®k(f®lega hibaterjesztési éskapsolási id®k)igen jelent®sen hozzájárulnakateljeshelyreállításiiklushoz.Annakérdekében, hogyahelyreállításiid®sökkenjen (
t R
),ahibadetektálás nem hagyatkozhat az elektromos réteg lassú üzenetváltásaira.Ennek
kiküszöbölésére bevezetésre kerültek az úgynevezett felügyeleti fényutak, az optikai
monitorozó utak, vagyis m-trailek [5℄. A felügyeleti fényutakkal történ® hibalokalizá-
iót már régóta kutatják. El®szöra entralizált,majd alokális hibalokalizáiókerült
el®térbe. A módszerek lényege, hogy minden fényút végén található egy monitoro-
zóeszköz (monitor),mely afényút állapotát ellen®rzi,és hibajeletgenerál,ha annak
megszakadásátérzékeli.Ezekalapjánpedigvagyahibamenedzserközpontilag[22,35℄,
vagymindenegyessomópontlokálisan[4,21,30,31℄egyértelm¶en lokalizáljaahibáta
begy¶jtött jelzésekb®l.Persze ahelyreállításiid®sökkentése szempontjábóla lokális
hibalokalizáió sokkalizgalmasabb téma.
A lokális hibalokalizáió els® lépése az volt, amikoregy adott somópont képessé
vált a lokálisan elérhet® m-trailek státuszaiból egyértelm¶en megállapítani az összes
(Loal Unambigous Failure Loalization röviden L-UFL).Természetesen a kapsolást
végz® somópontokat továbbra is az elektromos rétegen keresztül kellett értesíteni
az elvégezend® kapsolásról, ami megint sak lassú helyreállítást eredményezett. A
következ® lépésaz volt,amikora hálózat minden egyes somópontja L-UFL képessé
vált,vagyismindenegyes somópont képesséváltazegyértelm¶lokálishibalokalizái-
óra (Network-Wide Loal - UFL röviden NWL-UFL) [30℄.Ez amódszer már teljesen
optikai, vagyis nem szükséges elektromos rétegbeli üzenetváltás sem a hibalokalizá-
iós, sem a hibaértesítési fázisához. S®t, mivel mindegyik somópont képes minden
egyszeres hibát észlelni,így aszükséges kapsolás azonnalmegtörténhet.
A módszer nagy hátránya, hogyaz m-trailek igen hosszúak (feszít®fák [30℄), ami
implementálási gondokateredményezett, valamintnövelte a hibamonitorozási késlel-
tetést.Továbbávegyükészre,hogymindenegyessomópontmindenegyeshibátképes
észlelniannak ellenére, hogyrengeteg linkhibahelyreállításában nem vesz részt.
Ezeknek ahátrányoknak akiküszöbölését vette élba aGlobal NeighborhoodFa-
ilure Loalization (G-NFL) [21,31℄. A módszer lényegi ötlete, hogy minden egyes
somópontbansakegykisélhalmazhibáitlokalizáljukegyértelm¶en,rövidm-trailek
segítségével, vagyis azoknak a linkekneka halmazát amelyekesetén azadott somó-
pontnak védelmi kapsolást kell végeznie. Ezen linkek halmaza pedig az adott so-
mópontszomszédsága.Az újmódszer komolyáttörésnek bizonyult,mivelsökkentia
lokálisanlokalizálandólinkekszámát,ezzeldrasztikusanésautomatikusansökkentve
a módszer er®forrásigényét. Viszont fontos kiemelni, hogy a G-NFL-nél továbbra is
egyértelm¶en kell lokalizálni aszomszédsághoz tartozó linkhibákat.
Szakítva azegyértelm¶hibalokalizáióparadigmájával,disszertáiómban egy tel-
jesen új keretrendszert javasoltam, amely lokálisan lokalizálja a linkhibákat, de nem
mindegyiket egyértelm¶en, hanem a védelmi kapsolásnak megfelel® módon. Ez azt
jelenti,hogy,hapéldáulkétkülönböz® linkhibáhozugyanaz avédelmi kapsolás tar-
tozik, akkor a módszer nem feltétlenül lokalizálja a két hibát egyértelm¶en (külön-
külön),hanemelégtudnunk, hogyegyadottsoporthoztartozóvalamelyiklinksérült
meg,annakérdekében,hogyamegfelel®védelmikapsolástvégretudjukhajtani.Ezen
új keretrendszer az Advaned Global NeighborhoodFailure Loalization (AG-NFL).
Ezzel az újmódszerrel nagyságrendilegsikerült tovább javítaniaz er®forrásigényt.
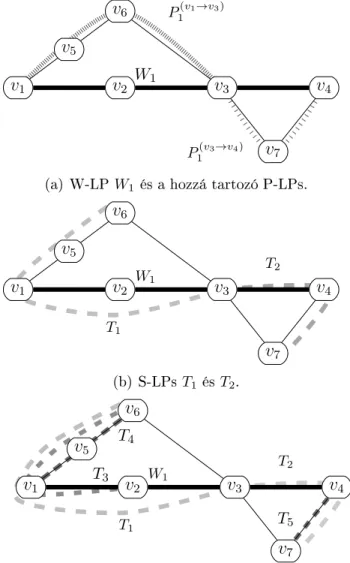
hatásait. A 7(a). mutatja azüzemi (
W 1
) útvonalhoz tartozó két védelmi szegmenstP 1 (v 1 →v 3 )
-tésP 1 (v 3 →v 4 )
-t.Abbanazesetben,ha(v 1 , v 2 )
vagy(v 2 , v 3 )
linkkiesik,P 1 (v 1 →v 3 ) −
− t
kell aktiválni, míg(v 3 , v 4 )
kiesése eseténP 1 (v 3 →v 4 )
-t. A 7(b). ábrán az AG-NFLmegoldáslátható.Mígebbenazesetbenelegend®kétm-trailamegfelel®hibalokalizá-
ióhoz, vagyis a megfelel®kapsolás elvégzéséhez, addig a G-NFL megoldásesetén a
szükséges m-trailekszáma5(7().ábra).Láthatjuk,hogyazAG-NFLa
v 6
-ossomó-pontban nem különbözteti meg
(v 1 , v 2 )
és(v 2 , v 3 )
meghibásodását, mert mindenkép- pen ugyanazt a védelmi kapsolást kell elvégezni, vagyisP 1 (v 1 →v 3 )
-t.Az is meggyel-het®,hogymég
(v 1 , v 5 )
és(v 5 , v 6 )
hibájátsemkülönböztetimeg(v 1 , v 2 )
és(v 2 , v 3 )
-t®l.Ez azért lehetséges, mivel azAG-NFL megenged úgynevezett nem diszruptív téves
kapsolást is,vagyisabban azesetben, ha
(v 1 , v 5 )
vagy(v 5 , v 6 )
kiesik, elvégezhetjükaP 1 (v 1 →v 3 )
kapsolástav 6
os somópontban,de mivelúgyissakel®re lefoglaltvédelmi kapaitást kapsolunk, ezért semmi nem történik sak kapsolási energia vész kár-ba. Természetesen, a kapsolás során üzemi útvonalat semmiképp nem szakíthatunk
meg,így sakbizonyossomópontok eseténengedélyezett azilyenjelleg¶ összevonás.
Összefoglalva, az AG-NFL esetén 5 helyett 2 m-trail elégséges a megfelel® védelem
megvalósításához,vagyis azer®forrás nyereség több, mint50%.
Tehát elmondható, hogya módszer kételvre épül:
(i) Abban az esetben, ha pontosan ugyanaz a védelmi kapsolás tartozik két vagy
több linkhez (az adott szomszédságban), akkor ezeket a hibákatnem kell meg-
különböztetni, vagyis egyértelm¶en lokalizálni, hanem elég összevonva. Ezek a
linkek üzemi szegmenseket alkotnak, erre példa 7(a). ábrána
v 6
szempontjából(v 1 , v 2 )
és(v 2 , v 3 )
linkek.(ii) Az olyan link hibákat, amelyek az adott somópont szomszédságban nem jár-
naküzemiútvonalmegszakítással,vagyisamelylinkekhezsaknemdiszruptív
kapsolásoktartoznak (avédelmikapsolásaktiválásanemokozzaegyüzemiút-
vonal megszakítását sem) nemkellmegkülönbözetnia szomszédságon kívüles®
linkekt®l.Errejópéldaa
(v 1 , v 5 )
és(v 5 , v 6 )
,amelyeketnemkellmegkülönbözetni(v 1 , v 2 ), (v 2 , v 3 )
linkekt®lav 6
os somópontban (7(a). ábra).Ezen elvek alapján a szomszédság mindenegyes somópontban két részre oszlik,
sának függvényében [J4℄ [31℄
SOD-IO SOD-O LOD-IO LOD-O
W-LPfelépítés X X
W-LPbontás X X
vagyis az egzakt és approximált identikáiót igényl® linkek soportjára. Ezzel az
új, még nomabb osztályozással szignikánsan sökkenteni tudjuk azer®forrásigényt
bármelymegosztottvédelemesetén. De amimég fontosabb,lehet®vétehetjük tetsz®-
legesmegosztottvédelemszámáraazer®forrástakarékosazonnalihelyreállítást(gyors
OXCkonguráiótfeltételezve[36,37℄).Természetesen avédelemrobusztussága sem-
miképpen sem valósulhatmeg.
Az AG-NFL adatréteg függ®ségét több szempontból is megvizsgáltam [31℄. Egy-
résztaztazesetetvizsgáltam,amikorazüzemiutaknemhasználhatókmonitorozásra,
ezt-O-valjelöltem.Aztazesetet,amikorfelhasználhatóakazüzemiutakahibamoni-
torozásra,-IO-valjelöltem.Másrészr®lattólfügg®en, hogyéppenazaktuálisforgalmi
mátrixra (Stritly On-Demand (SOD)), vagy az összes, a jöv®ben el®forduló forga-
lomra optimalizálunk(Loosely On-Demand (LOD)), másik faladatotkapunk [31℄.
Így tehátösszesen négy különböz® feladatotvizsgáltam (lásd 4.táblázat).
3. Tézis. [C4,J4℄ Javasoltam egy új hibalokalizáiós keretrendszert, az úgynevezett
Advaned Global Neighborhood Failure Loalization-t, amely lehet®vé teszi a rendkí-
vül gyors helyreállítást még a megosztott védelmi módszerek esetén is. Bevezettem
az úgynevezett tiltott linkpárok fogalmát, amelynek segítségével több m-trail feladatot
általásítottam, javítva a megoldásuk komplexitásán. A probléma megoldására egy új
heurisztikát javasoltam. Beláttam, hogy az AG-NFL SOD-IO és LOD-IO NP-teljes.
3.1. Tézis (Általánosított konepió). [C3,J4℄Bevezettemazúgynevezetttiltott
linkpárok fogalmát, amelyneksegítségéveltöbb m-trail feladatotáltalásítottam, javítva
a megoldásuk komplexitásán.A probléma megoldására egy új heurisztikátjavasoltam.
3.2. Tézis (AG-NFL komplexitás). [C3,J4℄ Beláttam, hogy az AG-NFL SOD-
IO és LOD-IO NP-teljes. A probléma megoldására egy új heurisztikát javasoltam.
v 3 v 4
v 6
v 1
v 5
v 2
v 7
W 1
P ( v 1 →v 3 )
1
P 1 ( v 3 →v 4 )
(a) W-LP
W 1
ésahozzátartozóP-LPs.v 3 v 4
v 6
v 1
v 5
v 2
v 7
T 1
T 2 W 1
(b)S-LPs
T 1
ésT 2
.v 3 v 4
v 6
v 1
v 5
v 2
v 7
T 1
T 2 W 1
T 3 T 4
T 5
() G-NFL megoldás (hárommal több S-LPs szüksé-
ges).
7.ábra. A
W 1
üzemiútésaT 1 , T 2
S-LPseléginformáiótszolgáltatnakahhoz,hogya megfelel®védelmikapsolásmegtörténjen,míga G-NFLesetén méghárom m-trailre(
T 3 , T 4 , T 5
) van szükség az egyértelm¶ hibalokalizáióhoz. A köztes somópontok is képesek a fényutak monitorozására.Az NP-teljességbizonyításaaHamilton
s − t
út[8,ProblemGT39℄problémájára támaszkodik,vagyisegygráf konstrukiósegítségével sikerült belátnom,hogyaz AG-NFL NP-teljes. A probléma megoldására adtam egy gyors és hatékony heurisztikát,
aminek azalapja aDijkstra algoritmus.
Az 5.táblázatbanbemutatottszimuláióseredményekb®lislátható,hogyezen új
keretrendszer segítségévelaz er®forrásigény jelent®sen,akár50%-kal issökkenthet®.
Természetesen azelérhet® nyereségfügga problémamivoltától(SOD vagyLOD,-IO
vagy -O).
5. Összefoglalás
Disszertáiómels®felébenhálózatikódolásalapúújmódszereketjavasoltam,amelyek
megfelelnekaújhálózatitrendeknekésképesekmegfelelniazújkomplexQoS(Quality
of Servie)követelményeknek. Ez azt jelenti,hogyképesek robusztus módonazonnali
helyreállítást biztosítani, valamint hiba után is eleget tesznek késleltetési kénysze-
reknek alasony er®forrásigény mellett. Ezen új módszereket összehasonlítottam a
jelenleg leggyakrabban használatos tehnológiákkal. A módszerek valós hálózat-
ban is bizonyítottak, vagyis implementálásra kerültek egy európai méret¶
SDN hálózatban, ahol a gyakorlataban igazolták hatékonyságukat.
Disszertáióm második felében a hibalokalizáiókérdésével foglalkoztam. Vagyis,
olyan új lokális hibalokalizáiós módszert javasoltam, amely lehet®vé teszi az igen
gyors helyreállítást megosztott védelmi módszerek esetén is (