É importante ressaltar que todos os capítulos foram elaborados por autores pertencentes ao corpo docente do IFPB. Assim, o livro trata de cinco diferentes tópicos da engenharia elétrica, a saber: identificação e modelagem matemática de sistemas dinâmicos, inteligência artificial, conversores de energia, aterramento e micro-ondas.
Agradecimentos
SUMÁRIO
Laboratório de Sistemas de Instrumentação, Controle e Automação (LINSCA), Instituto Federal de Educação, Ciência e Tecnologia da Paraíba (IFPB), Campus João Pessoa, e-mail: [email protected]. Laboratório de Automação de Petróleo (LAUT/UFRN), Unidade de Informática Acadêmica, Instituto Federal de Educação, Ciência e Tecnologia da Paraíba (IFPB), Campus João Pessoa, e-mail: [email protected].
Identificação de parâmetros e sintonia de controladores PID em uma planta térmi-
- Introdução
- Controlador PID
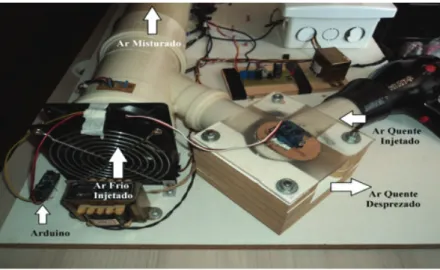
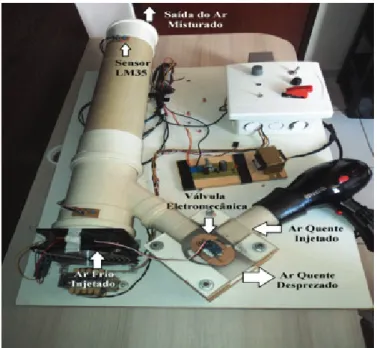
- Descrição da planta de controle
- Modelagem matemática do processo e projeto de controladores As classes científi ca e industrial têm tido bastante interesse na
- Sintonia dos parâmetros de controladores PID
- Método de Ziegler-Nichols em Malha Aberta
- Método de Sintonia Chien, Hrones e Reswick (CHR)
- Método de Sintonia Cohen-Coon
- Resultados Experimentais
- Considerações Finais
- Introdução
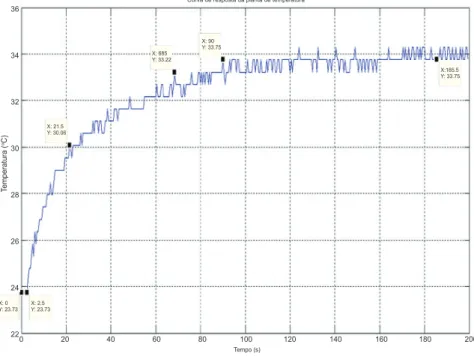
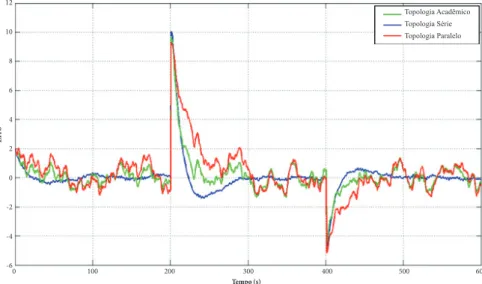
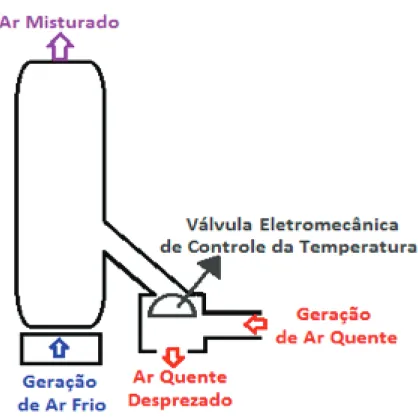
A Figura 1.3 descreve a fonte de ar frio (cooler), a fonte de ar quente (secador), a válvula eletromecânica (servo motor) e a placa de controle e aquisição de dados (Arduino). Analisando a Figura 1.9, nota-se que a resposta do processo apresenta oscilações menores que as encontradas nas outras duas topologias.
Identificação de sistemas lineares por predição de erro e seus principais
- Modelos SISO em tempo discreto
- Métodos paramétricos de estimação
- Estimador dos mínimos quadrados recursivo
- Algoritmo dos Mínimos Quadrados Recursivo
- Estimação de parâmetros de sistemas variantes no tempo Quando um sistema possui parâmetros que variam ao longo do
- Outros algoritmos de estimação recursiva
- Considerações Finais
- Introdução
O objetivo do capítulo é apresentar uma visão geral da identificação de sistemas lineares usando o método de previsão de erros e seus principais algoritmos recursivos para estimar os parâmetros do modelo. No início do procedimento de estimação, são dados valores iniciais ao vetor de parâmetros θk e à matriz de covariância Pk.
Modelamento não linear de dois elos de um robô eletromecânico de cinco
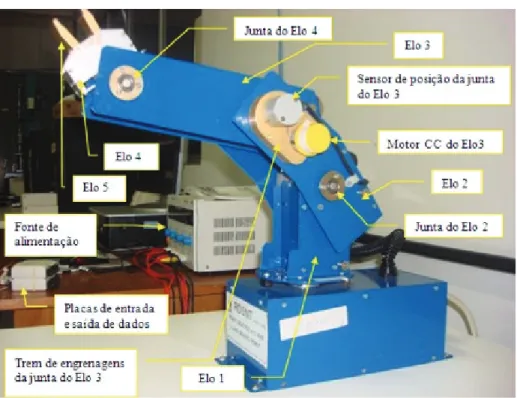
Descrição do sistema
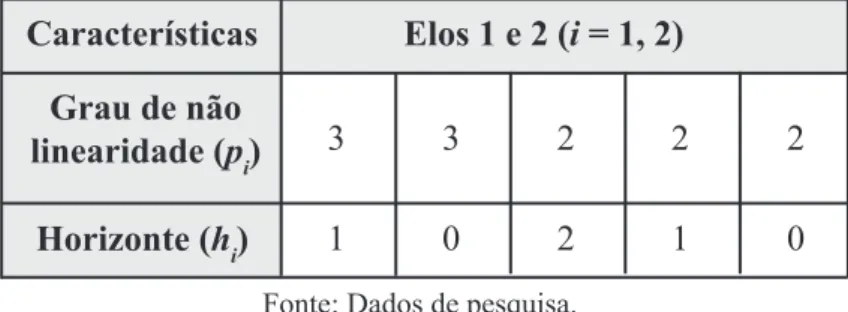
A primeira articulação rotatória refere-se ao movimento angular da base, com deslocamento máximo de 293º, a segunda articulação rotativa refere-se ao ombro, com deslocamento angular máximo de 107º, a terceira articulação rotativa refere-se ao cotovelo, com amplitude angular máxima deslocamento. deslocamento de 284o, a quarta junta rotativa refere-se ao punho com deslocamento angular máximo de 360o, e a quinta junta rotativa refere-se a um sistema de parafuso sem coroa, responsável pelo impacto da garra, máximo 22mm, capacidade de carga 350 gramas e parada automática por meio de um microinterruptor operando com velocidade de fechamento ajustável. O robô se comunica com o computador por meio de duas placas de entrada e saída de dados, modelo NI USB-6009, e um programa de cálculo baseado nas plataformas LabView e Matlab.
Identifi cação não linear do robô manipulador
Os modelos matemáticos não lineares dos acoplamentos do robô manipulador em estudo são obtidos por identificação paramétrica. A solução da equação 3.8 fornece os parâmetros estimados θ1(k) e θ2(k) do modelo matemático, relativos aos elos 1 e 2 do robô manipulador, respectivamente. As Figuras 3.3 e 3.4 ilustram os sinais de entrada fornecidos e os sinais de saída dos enlaces 1 e 2 do robô manipulador, respectivamente.
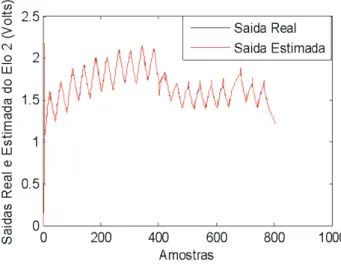
A Figura 3.5 ilustra a saída real e a saída estimada do link 1 do robô manipulador, e a Figura 3.6 ilustra a saída real e a saída estimada do link 2.
Considerações finais
Identificação de modelos usando subespaços usando o método N4SID para simulação de controle LQR em um manipulador robótico. Projeto de um controlador PD adaptativo via alocação de polos aplicado a um robô manipulador planar de dois graus de liberdade.
Introdução
No caso de RNAs diretas, o fluxo de informação é sempre no sentido direto, indo da camada de entrada para a camada de saída. Esse tipo de rede é amplamente utilizado, principalmente por existirem métodos de aprendizado bem conhecidos e fáceis de usar, como o método de retropropagação. Neste capítulo é apresentada a utilização deste último tipo de RNA em três aplicações distintas: a previsão de elementos numa série temporal referente à radiação solar num dia de inverno na cidade de Vila Real, Portugal; filtragem de ruído branco usando um filtro não linear; e finalmente como controlador de posição na simulação do posicionamento do eixo X de uma tabela de coordenadas XY.
Utilização da rede neural como previsor de série temporal Uma série temporal é definida como uma sequência de realiza-
- Equação à diferença
- Série de radiação solar e resultado
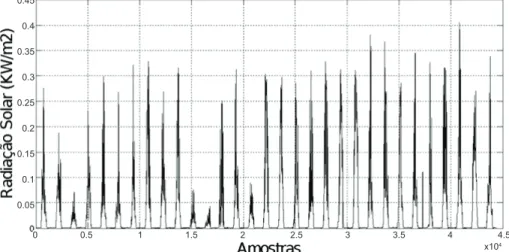
Neste capítulo, em vez de determinar uma equação paramétrica, uma rede neural artificial (ANN) é usada para obter valores futuros de uma série temporal de radiação solar com base em valores passados. A base de dados utilizada para obtenção do modelo não linear é composta por sinais de radiação solar obtidos experimentalmente a cada intervalo de amostragem de 1 minuto em uma estação meteorológica localizada na cidade de Vila Real, Portugal. A RNA possui seis neurônios de entrada aos quais são aplicados os valores do sinal de radiação solar em seis tempos de amostragem anteriores (k - 1 a k - 6).
A Figura 4.3 ilustra um gráfico onde os valores experimentais da série temporal são plotados em preto e os valores preditos pela RNA em vermelho para um dos dias considerados.
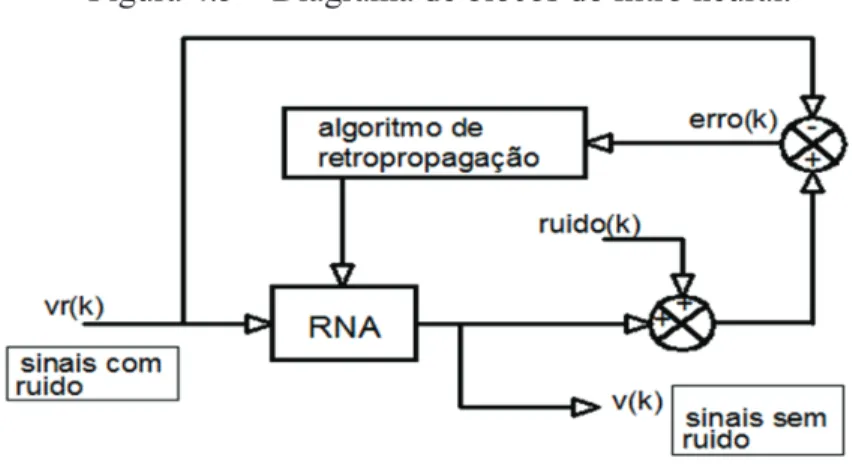
Utilização da RNA como filtro não linear
- Estrutura do filtro
- Resultados obtidos
- Utilização da RNA como controlador adaptativo
Para testar a eficácia do filtro neural, foi aplicado um sinal de entrada senoidal mais ruído, conforme ilustrado na Figura 4.7. O sinal de saída do filtro neural é ilustrado na Figura 4.8, juntamente com o sinal senoidal sem ruído original, que é o sinal desejado. Após uma série de sessões de treinamento, como pode ser visto, o filtro neural forneceu o sinal com quase total supressão de ruído.
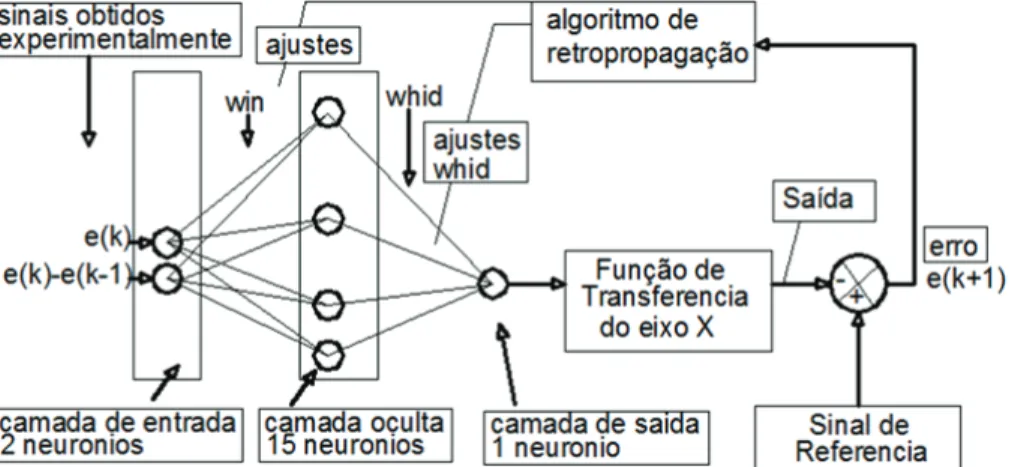
Para demonstrar o uso de uma rede neural artificial como controlador, neste trabalho é utilizada a simulação do acionamento de um controle de posição.
Modelo matemático da função de transferência e identifi cação experimental
Para obter a função de transferência do eixo X da tabela de coordenadas XY, utiliza-se a técnica de identificação caixa preta, na qual não é necessário conhecer os parâmetros citados, facilitando sua execução. O algoritmo de estimação dos parâmetros da função de transferência utilizado nesta pesquisa é o algoritmo recursivo dos mínimos quadrados (RQM), ilustrado por Aguirre (2007), no qual a função de transferência dada pela equação 4.2 é transformada na forma de sua discreta na forma Ω = ΦT θ, onde θ é o vetor de parâmetros do sistema e Φ o vetor de regressores. Essa estrutura, ilustrada na Figura 4.10, foi a mesma utilizada por Menezes Filho et al. 2010), no qual é explicado o seu funcionamento.
A saída do sistema controlado neste caso pode ser vista na Figura 4.12, onde pode-se observar que acompanhou o valor de referência para ambos os valores impostos sem ultrapassá-lo.
Considerações fi nais
Depois disso, houve uma alteração no valor de referência, que passou para a metade do valor anterior. O leitor pode perceber que uma grande vantagem na utilização de Redes Neurais Artificiais está no processo de aprendizagem. Assim, percebe-se que não foram necessários cálculos ou tabelas para determinar os parâmetros que formam as estruturas utilizadas nos três casos, restando o peso sináptico da rede de treinamento a que foi submetido. manteve-se a aquisição dos três objetivos propostos.
Filtro mediano de difusão com determinação automática de parâmetros com aplicações em sinais de ECG e sensor piezoelétrico.
Introdução
Rafaelle de Aguiar Correia - IFPB Márcio Emanuel Ugulino de Araújo - IFPB Marcílio de Paiva Onofre Filho - IFPB Fábio Meneghetti Ugulino de Araújo - UFRN.
Uso de lógica fuzzy para gerar dinamicamente o setpoint em um
- O processo de irrigação
- Conteúdo de água no solo (CAS) ou umidade do solo
- Parâmetros do sistema de irrigação
- Modelagem do sistema fuzzy
- Sistema fuzzy
- Variáveis fuzzy
- Modelo do solo
- Regras de inferência
- Resultados
- Parâmetros fuzzy-Mamdani
- Resultados da simulação fuzzy-Mamdani
- O Controlador PID
- Considerações fi nais
- Introdução
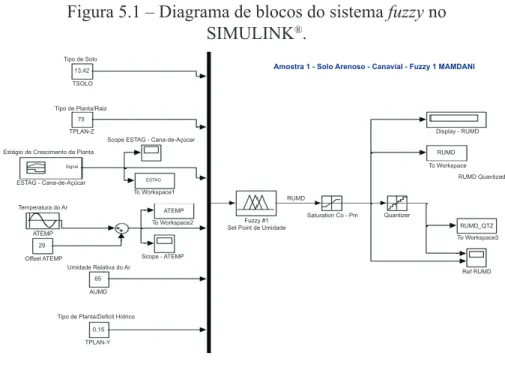
A umidade do solo está relacionada ao teor de água do solo (CAS) ou tensão de água no solo (TAS). A Figura 5.1 mostra um diagrama de blocos de um sistema flexível que gera uma referência dinâmica de umidade do solo. Para um solo franco-arenoso com ATEMP ajustado para 30 °C, a umidade de referência do solo tem o perfil mostrado na Figura 5.8.
A Figura 5.11 ilustra o set point gerado pelo fuzzy-Mamdani e a resposta simulada do solo arenoso ao controle PID.
Sistema automatizado para o aproveitamento de água cinza e azul,
- Controle de processos
- Desenvolvimento do protótipo
- Sensor de pH
- Atuador
- Resultados
- Fuzzy P
- Fuzzy PD
- Considerações Finais
- Introdução
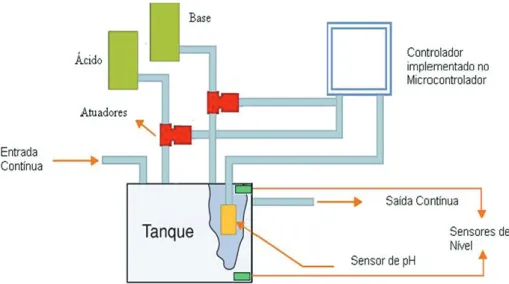
A medição do pH é um dos testes mais comumente usados na análise da qualidade da água. 5 metros de cano 20mm e 10 cotovelos; como já mencionado, há também um sensor de pH e duas bombas dosadoras de reagentes de pH. No reservatório superior - ou reservatório de controle, encontra-se um sensor de pH (que envia os dados lidos para o microcontrolador); também mistura a substância reagente com a água a ser neutralizada por meio de um misturador.
Sistema automatizado para aproveitamento de água cinza e azul, com controle de PH por lógica fuzzy.
Introdução à confiabilidade em conver- sores estáticos de potência VSI
- Noções básicas de confiabilidade
- Ferramentas estatísticas para determinação da confiabilidade As funções de densidade de probabilidade (f.d.p.) são as ferra-
- Funções de distribuição de probabilidades utilizadas em con- fiabilidade
- A confi abilidade de capacitores eletrolíticos
- Leitura da RSE de capacitores eletrolíticos de baixa tensão Um procedimento desenvolvido nos laboratórios do IFPB – Ins-
- Confi abilidade de chaves IGTBs
- Considerações finais
- Introdução
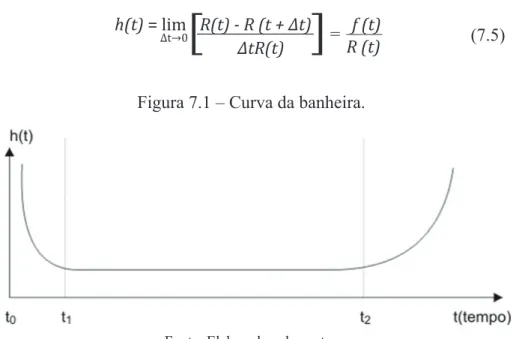
A função de probabilidade de falha cumulativa F(t) expressa a probabilidade de falha de um componente em um determinado período, portanto a probabilidade de uma unidade falhar em um período [0,t1] é expressa pela equação 7.2. R(t) = e -tλ t ≥ 0 (7.6) Considere um sistema com N componentes, ilustrado na figura 7.2, a confiabilidade do sistema é representada pela equação 7.7, se houver uma suposição de independência dos processos de erro nos componentes . O modelo de Arrhenius (FOUCHER et al., 2002), baseado na temperatura média, é o que descreve com mais precisão o processo de falha de capacitores.
Existe uma correlação muito forte entre o processo de falha e os ciclos de temperatura (BAYERER et al., 2008).
Introdução aos filtros ativos de potência em paralelo
- Modelo do sistema
- Modelo da confi guração a três fi os
- Modelo da confi guração a quatro fi os
- Estratégia PWM
- Estratégia PWM da configuração a três fios
- Estratégia PWM da configuração a quatro fios
- Estratégia de controle
- Configuração a três fios
- Confi guração a quatro fi os
- Controlador de corrente
- Simulações das configurações de filtros estudadas
- Considerações fi nais
- Introdução
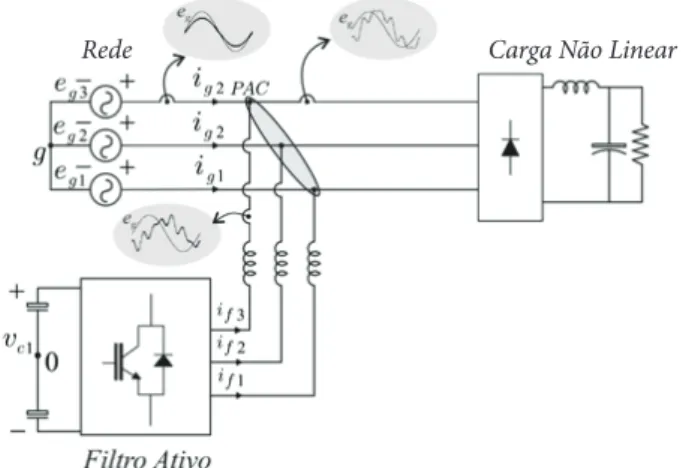
A Figura 8.8 ilustra detalhes dos controladores de corrente tanto para a situação balanceada (sistemas de três fios) quanto para a situação desbalanceada (sistemas de quatro fios). Na Figura 8.9, uma transição de carga (um aumento na componente fundamental da corrente de carga) foi inserida para verificar o comportamento do controle da barra. A Figura 8.10 ilustra a tensão da rede, representada por bv1, para indicar que esta tensão é a fase 1, e a corrente da rede, representada por ig1, para indicar que esta corrente é a fase 1.
A Figura 8.11 ilustra a tensão de linha da fase 1 e a corrente demandada pela carga nessa fase.
Controle de potência ativa e correção de fator de potência em sistema que
- Descrição do sistema
- Modelagem do sistema
- Estratégia de controle
- Projeto do controlador PI01
- Projeto do controlador PI02
- Projeto do controlador PI03
- Resultados de simulação
- Considerações fi nais
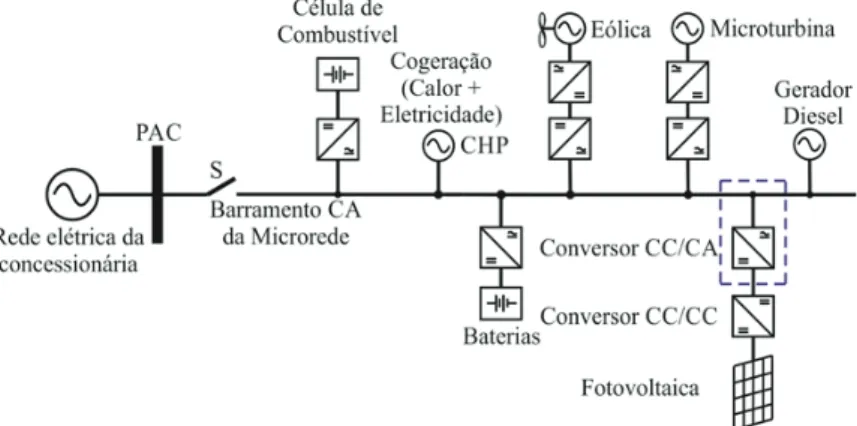
A Figura 9-6 mostra a dinâmica da tensão no PAC e a corrente da rede elétrica durante uma simulação de 20 segundos. A Figura 9-8 mostra a simulação do gráfico de tensão e corrente da rede elétrica obtido pela ampliação da área 2 da Figura 9-6. Entre 12,69 e 12,71 segundos, a fonte renovável injeta energia no PAC com o fator de potência da rede próximo à unidade.
O fator de potência é quase o mesmo, então a qualidade da energia na rede elétrica é melhorada.
Comportamento de sistemas de ater- ramento em linhas de transmissão
Introdução
Segundo a Eletrobrás, no Brasil, mais de 95% das linhas de transmissão estão acima do solo, possuem grandes extensões e seções transversais com alto índice de keraun, ficando expostas às condições climáticas, principalmente descargas atmosféricas, que causam interrupções. e falhas diversas que, segundo estatísticas das concessionárias de energia (VISACRO FILHO, 2005), são responsáveis por 70% das interrupções do sistema de transmissão. Portanto, a análise é essencial para o dimensionamento adequado do sistema de aterramento da linha de transmissão para dissipar picos de correntes atmosféricas. É ainda necessário reduzir as interrupções e perturbações quando estes picos ocorrem nas referidas linhas de transmissão, de forma a melhorar a qualidade do fornecimento de energia elétrica, o que tem impacto na redução de DEC (Duração Equivalente de Interrupção) por unidade consumidora) e FEC (frequência equivalente de interrupção por unidade consumidora) compatível com sua importância econômica e operacional para o sistema elétrico.
A forma mais comum de analisar o comportamento de sistemas de aterramento para estruturas de linhas de transmissão é a simulação com softwares especiais, sendo o mais utilizado o EMTP (Electromagnetic Transient Program), (DOMMEL, 1969), conforme será feito neste artigo. sistemas de aterramento e pára-raios utilizando sua versão de ATP (Alternative Transient Program) através da interface gráfica ATPDraw.
Modelagem da instalação
No circuito equivalente à representação esquemática da Figura 10.2, foram utilizados modelos para as regiões da linha (com a indutância mútua entre todos os cabos condutores e os para-raios), modelos para o cabo de equalização conectando os elementos na estrutura (hardware de isoladores de manutenção para cada condutor de fase, raio e cabo de terra) e modelos para as impedâncias equivalentes do condutor de contrapeso e da haste de terra quando submetido a impulsos atmosféricos. Para determinar a demanda real através do isolamento do circuito de alta tensão, o condutor de equalização que percorre a estrutura é dividido em seis partes conforme indicado nas Figuras 10.3a e 10.3b correspondentes às distâncias entre: cabo de descarga; os equipamentos de suporte para os condutores das fases A, B e C; e o pé da estrutura cujo comprimento total foi considerado foi de 20 metros. O modelo elétrico do condutor de contrapeso acima mencionado é o modelo π, ilustrado na Figura 10.4, cujos valores dos parâmetros foram obtidos calculando as formulações matemáticas relacionadas (RUDENBERG, 1968).
Na representação geral do condutor de contrapeso, ele é representado por n células idênticas, cada uma correspondendo a um metro do condutor referenciado.
Resultados das simulações