Professor Adjunto do Instituto de Geociências da Universidade de Brasília, graduado em Geografia pela Universidade de Brasília (1994), com mestrado em Tecnologia Ambiental e Recursos Hídricos pela Faculdade de Engenharia Civil da Universidade de Brasília (1997) e Doutor em Geologia pelo Instituto de Geociências da UnB (2001). É nesse cenário que surge este importante trabalho, organizado por Paulo Roberto Meneses e Tati de Almeida, ambos professores da Universidade de Brasília, com foco no processamento de imagens de sensoriamento remoto.
História Inicial
Introdução ao processamento de imagens de sensoriamento remoto 2 primeiros estudos mais detalhados das características terrestres de áreas de cobertura de neve, gelo polar, água oceânica e cadeias de montanhas. Introdução ao Processamento de Imagem por Sensoriamento Remoto 3 infravermelho próximo e uma imagem térmica além do que era possível com o filme fotográfico.
Definição de Sensoriamento Remoto
Por um lado, existem sensores hiperespectrais com centenas de bandas espectrais (centenas de imagens) e, por outro lado, existem sensores de alta resolução espacial capazes de detectar objetos menores que 50 cm na superfície da Terra. E para romper a opacidade das nuvens, muito comum em regiões como a Amazônia, existem sensores de radar com suas fontes artificiais de radiação eletromagnética que tornam as nuvens um objeto transparente.
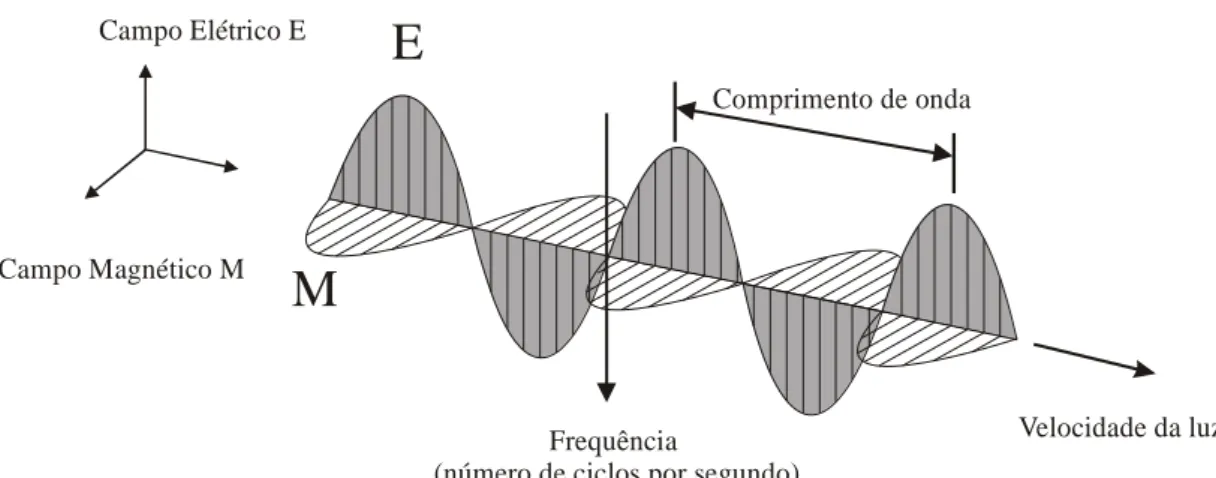
Natureza da Radiação Eletromagnética
O termo discreto significa que a intensidade de energia transmitida pela radiação eletromagnética em um determinado comprimento de onda é sempre a mesma, independentemente de quando é medida. A Equação 1.4 mostra que um fóton com energia E é inversamente proporcional ao comprimento de onda EMR.
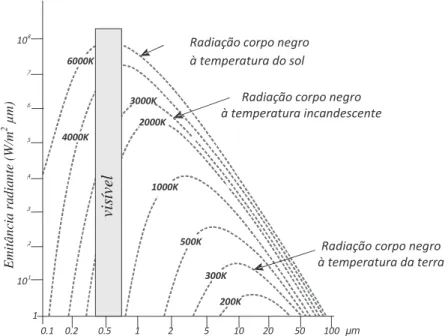
Fontes de Radiação Eletromagnética
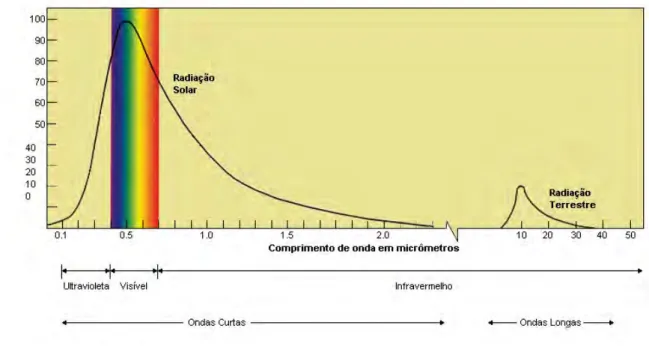
Observe nesta figura que o pico máximo de emitância está localizado em um comprimento de onda de 0,49 μm, ou seja, na região espectral da luz visível. Em relação à curva de emissão de radiação da fonte a 300 K, que é comparável à temperatura média da superfície terrestre, seu pico máximo de energia emitida está localizado no comprimento de onda de 9,6 μm.
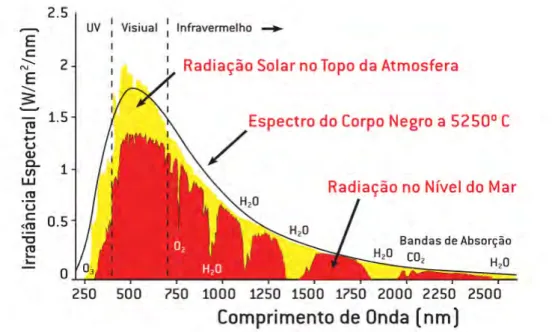
Interferências Atmosféricas
Introdução ao processamento de imagens por sensoriamento remoto 16 Teoricamente, o espalhamento pode ser dividido em três categorias diferentes, dependendo da relação entre o comprimento de onda da radiação e o tamanho das partículas atmosféricas que causam o espalhamento. Ocorre quando o tamanho da partícula é muito maior que o comprimento de onda da faixa espectral do visível ao térmico (0,4 μm a 14 μm).
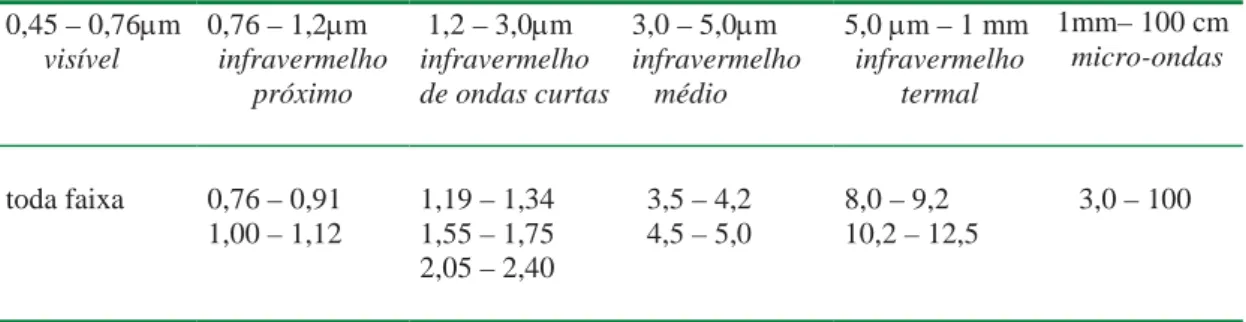
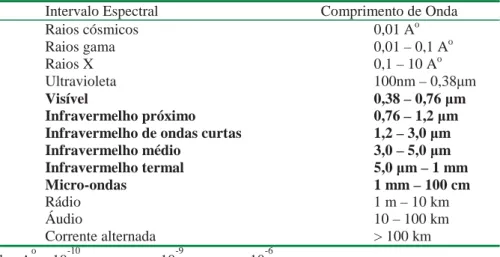
Espectro Eletromagnético
A Tabela 1.3 é uma divisão dos limites de comprimento de onda do espectro de cores visíveis. Sabendo que a radiação eletromagnética de cada comprimento de onda interage com os objetos terrestres de diferentes formas e com diferentes intensidades, um dos parâmetros mais importantes para definir as características de um sensor são os comprimentos de onda das imagens que o sensor irá adquirir.
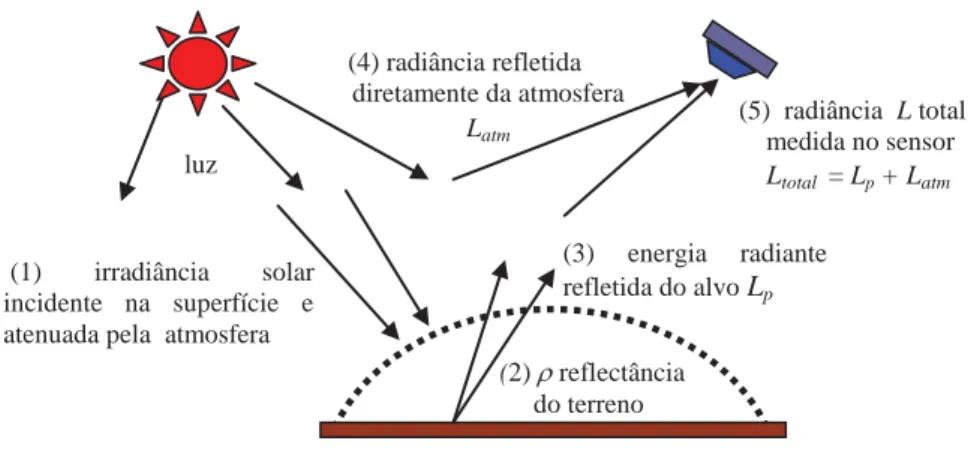
Conceitos de Radiância e Reflectância
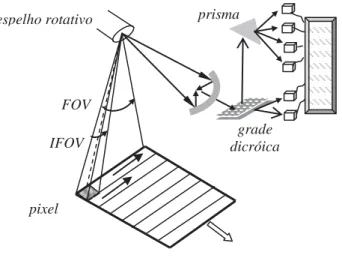
Introdução ao processamento de imagens de sensoriamento remoto 23 Voltando à Figura 1-14, vemos que o sensor focaliza uma área no solo cujo tamanho é determinado pelo ângulo sólido do sensor. Desta forma, o sensor mede a intensidade da radiação saindo da superfície do solo delimitada por um ângulo sólido Ω.
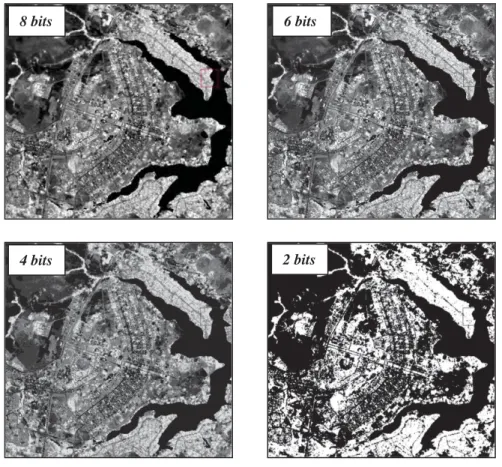
Resoluções das Imagens
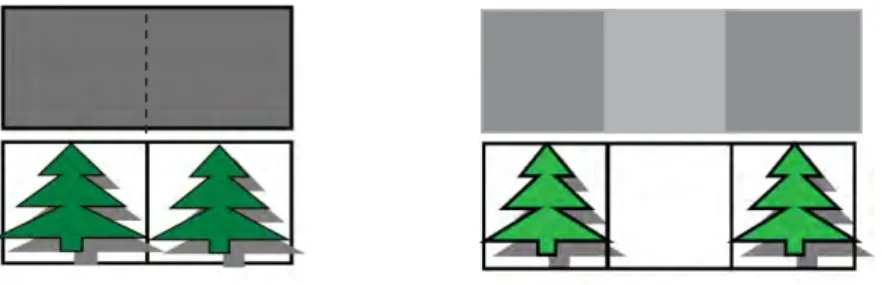
Uma compreensão desse conceito é mostrada na Figura 1.17, simplificada para um único elemento de resolução espacial no terreno. Introdução ao Sensoriamento Remoto por Imagem 31 A maioria dos sensores multiespectrais com resolução espacial de 10 a 30 metros trabalham com resoluções radiométricas de 8 bits, ou seja, são capazes de distinguir até 256 valores de radiância por segundo. banda espectral.
Das Fotos Aéreas às Imagens Multiespectrais
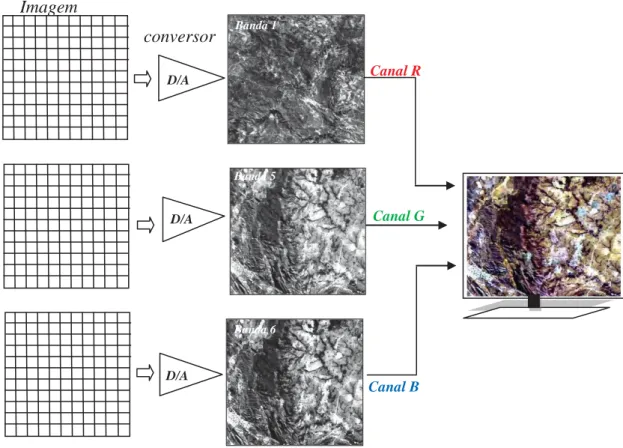
Uma introdução ao processamento de imagens de sensoriamento remoto em 35 comprimentos de onda diferentes, expandiu seu uso muito além das aplicações temáticas das ciências da Terra. Devido à maior eficiência e versatilidade, os detectores eletrônicos registram a radiação eletromagnética em diferentes faixas de comprimento de onda, o que confere aos sensores de imagem a capacidade de criar simultaneamente um grande número de imagens em diferentes comprimentos de onda.
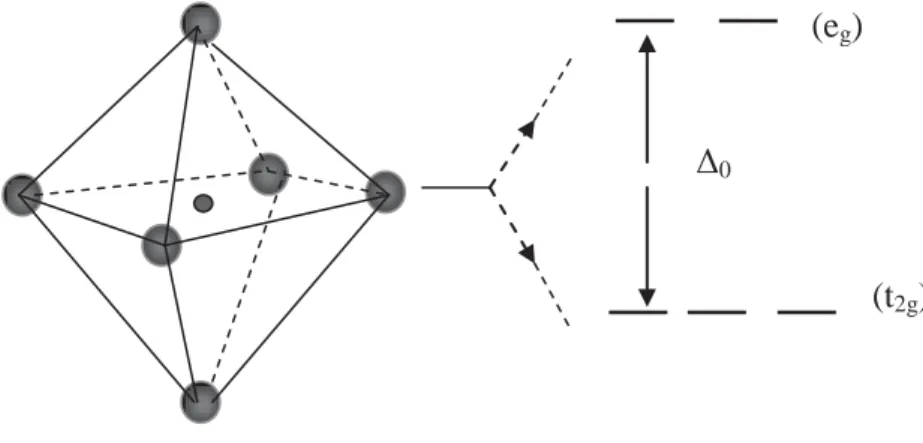
Mecanismos de Imageamento Multiespectral
Ou seja, cada comprimento de onda carrega uma quantidade específica e única de energia, e cada átomo ou molécula tem seus próprios níveis ou estados de energia específicos. Isso significa que naquele comprimento de onda o mineral absorveu uma grande quantidade de energia daquela onda e, consequentemente, apresentará uma refletância menor.
Temperatura e Calor
Dois outros conceitos fundamentais para nossa compreensão dos sensores térmicos são o calor sensível e o calor latente. Para entender o conceito de calor latente, usaremos a água e as mudanças em seu estado agregado, conforme mostra a Figura 3.2.
Leis Físicas da Radiação Termal
Introdução ao processamento de imagens por sensoriamento remoto 50 A partir do gráfico da Figura 3.3, podemos ver que existe, na verdade, uma relação inversa entre a temperatura e o comprimento de onda no qual o pico máximo da energia radiante espectral é encontrado. O comprimento de onda em que a emissão de energia é máxima pode ser determinado pela Lei de Wien, também conhecida como Lei do Deslocamento, expressa pela Equação 3.2 e visualizada na Figura 3.5.
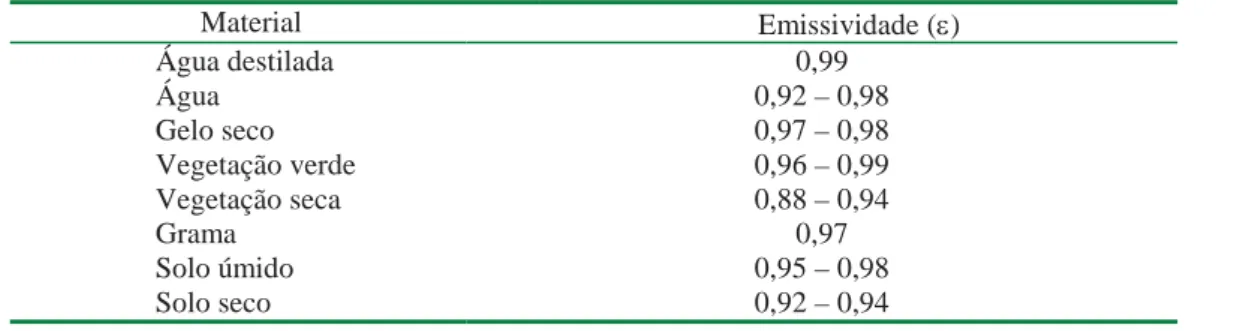
Emissividade
Introdução ao Processamento de Imagens por Sensoriamento Remoto 52 seriam emitidas por um corpo negro com a mesma temperatura. Observe que a curva de emissividade para a água se aproxima da curva de emissividade para o corpo negro.
Temperatura Cinética versus Temperatura Radiométrica
Introdução ao Processamento de Imagens por Sensoriamento Remoto 55 de onde se obtém a relação entre a temperatura de radiação medida Trad de um objeto e sua temperatura cinética Tkin. Para materiais com emissividade muito baixa, como metais polidos, a temperatura radiométrica será muito menor que sua temperatura cinética, dando a impressão de uma superfície mais fria.
As Imagens do Termal
Introdução ao Processamento de Imagens por Sensoriamento Remoto 58 A escolha do comprimento de onda do radar deve ser compatível com o tamanho das feições do alvo a serem identificadas. Como a casa rebate o pulso das ondas do radar com uma intensidade maior do que a árvore, a força de resposta do sinal registrado é mais forte.
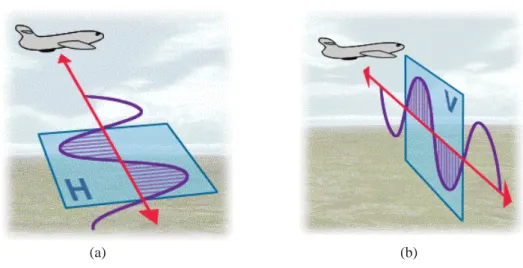
Polarização da Onda
Introdução ao processamento de imagens por sensoriamento remoto 61 No sensor de radar a bordo do satélite SeaSat, o pulso transmitido tinha uma potência de 50 watts, enquanto a potência efetiva recebida pela antena de um objeto tinha uma área de seção transversal de pulso de 10 m2 era cerca de 10-17 Watts. Introdução ao Processamento de Imagens por Sensoriamento Remoto 62 retroespalhamento múltiplo de galhos e folhas, conforme ilustrado na Figura 4.7.
Geometria de Imageamento
A direção de visão ou direção do feixe é a direção da iluminação ao longo da qual o pulso do radar se propaga e é um parâmetro importante na geração de imagens de sensores de radar de observação lateral. É o ângulo formado entre o pulso do radar e a vertical no plano da superfície no ponto onde o pulso toca o solo.
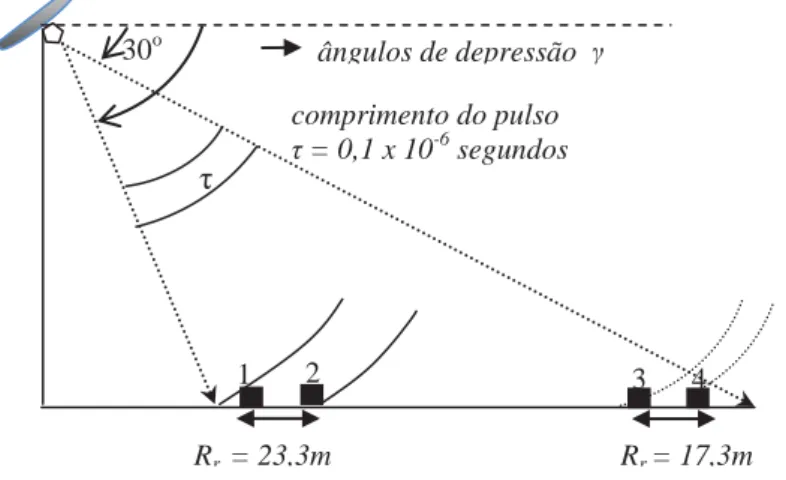
Resolução Espacial
Existem duas formas de calcular a resolução azimutal: pelo tamanho da antena ou medindo o ângulo do feixe de onda emitido pela antena. Com relação à medição da resolução azimutal (RAZ) em função do ângulo de abertura do feixe do radar, também é facilmente visto na Figura 4.10 que quanto menor a abertura do ângulo β, mais estreito é o feixe do radar e melhor a resolução.
Radar de Abertura Sintética
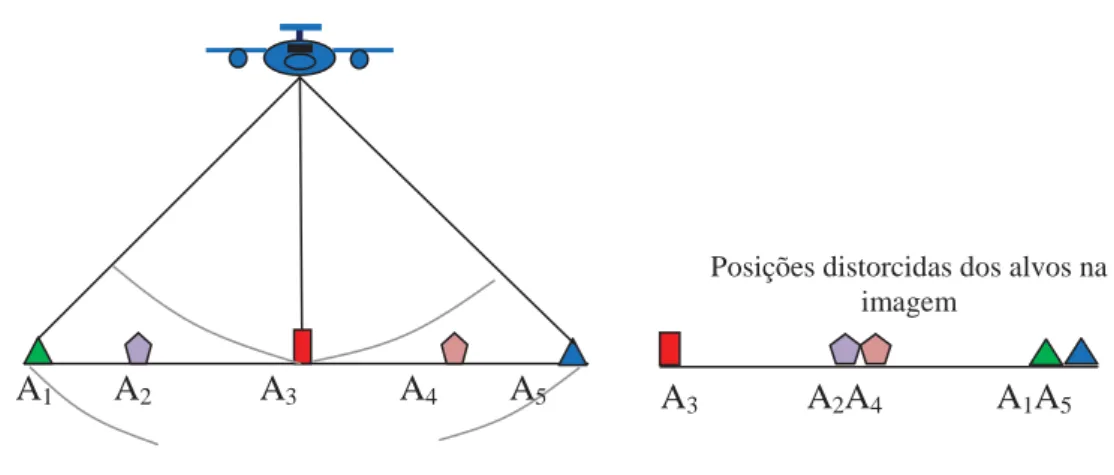
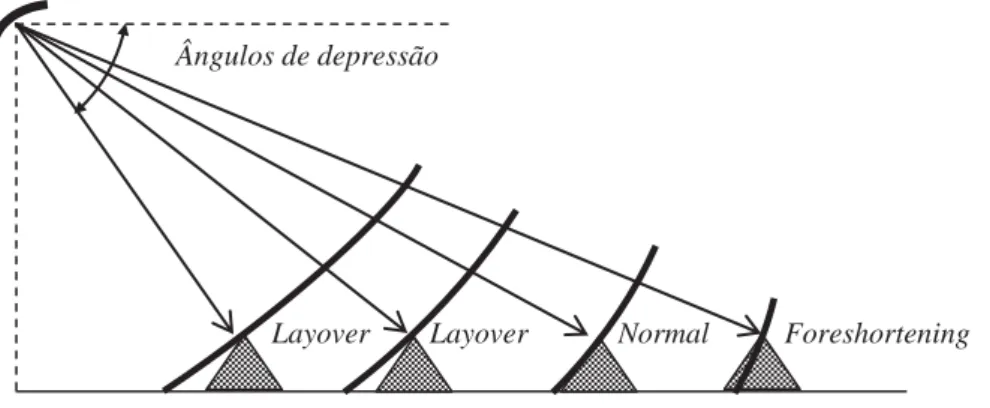
Distorções Geométricas
Introdução ao processamento de imagens por sensoriamento remoto 67 A visão lateral das imagens de radar é como uma visão oblíqua. Com exceção da posição normal, as demais indicam distorções no formato dos objetos que serão vistos na imagem do radar.
Ruído Speckle
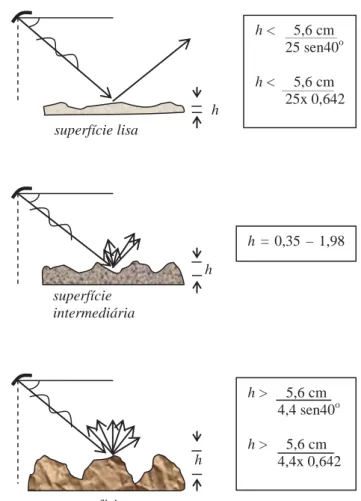
Interação do Pulso de Radar com as Superfícies dos Objetos
O terceiro parâmetro que controla a interação macroscópica é o ângulo de ataque local, formado pela inclinação do pulso da onda e a linha perpendicular à superfície do terreno, em cada ponto do terreno onde a onda incide. Em um relevo não plano, o ângulo de ataque local descreve a relação entre o pulso do radar e a inclinação da superfície das encostas do relevo.

Constante Dielétrica
Serão inúmeros ângulos, sem condições ou necessidade do intérprete saber os valores de cada ângulo. Esta propriedade da constante dielétrica explica a extraordinária imagem de radar obtida pelo SIR-A (Shuttle Imaging Radar) em novembro de 1981.
Interferometria
Programas de processamento de imagens comerciais como ENVI, ER-MAPPER, PCI, SPRING (domínio público), IDRISI, ERDAS IMAGINE e outros usam um formato de dados raster que consiste em um arquivo binário (base dois) contendo os dados da imagem. imagem, acompanhada de um pequeno arquivo de texto descrevendo algumas informações sobre os dados da imagem (cabeçalho). A maioria dos programas de processamento de imagem de sensoriamento remoto permite que o usuário salve imagens em formatos nativos de outros programas.
O que é Processamento de Imagens
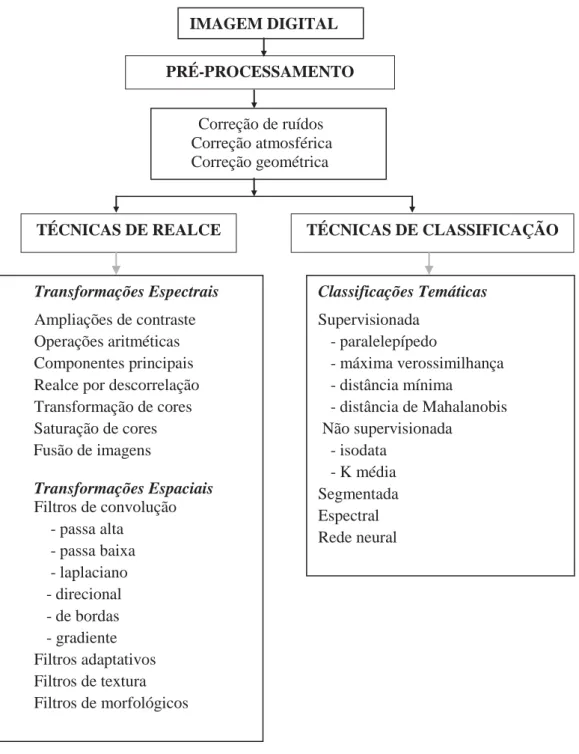
Este capítulo inicia a discussão das técnicas de processamento de imagem apresentando métodos de pré-processamento para correção de imagem. Cada capítulo a seguir cobrirá as técnicas de processamento seguindo aproximadamente o diagrama mostrado na Figura 6.1.
Pré-processamento de Imagens Digitais
Introdução ao Processamento de Imagens por Sensoriamento Remoto 101 menos os quatro pixels vizinhos da imagem corrigida (colunas 427 e 428 e linhas 288 e 289). Introdução ao Processamento de Imagens por Sensoriamento Remoto 102 que podem ser de interesse para fins de fotointerpretação de imagens.
AMPLIAÇÃO HISTOGRÂMICA DE CONTRASTE Paulo Roberto Meneses
Introdução
Esses dois processos de realce de imagem realizam transformações do espaço espectral e da informação espacial da imagem, por isso são consideradas técnicas de transformação do espaço. Devido à sua simplicidade e dado que as imagens originais possuem baixos contrastes espectrais, quase todos os sistemas de processamento de imagens comerciais iniciam o realce automático de contraste quando a imagem original é carregada na tela para produzir uma imagem com forte impacto visual.
Representação Histogrâmica da Imagem Digital
Introdução ao processamento de imagens por sensoriamento remoto 106 relatórios estatísticos sobre dados de imagem. Em muitos casos de imagens de sensoriamento remoto, apenas o conhecimento visual da forma do histograma de uma banda já fornece boas informações sobre o comportamento espectral da cena.

Expansão linear por saturação
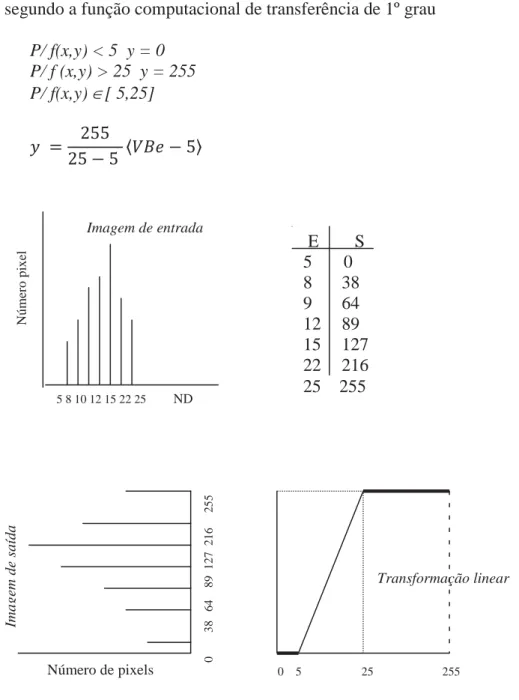
Como exemplo prático, a Figura 7.5 corresponde ao histograma de uma banda putativa, com os valores mínimo e máximo dos pixels da imagem de entrada definidos como 5 e 25, respectivamente. Computacionalmente, os cálculos operacionais podem ser representados numericamente pela aparência op -table, que relaciona os valores de brilho da imagem original com os valores de brilho correspondentes da imagem aprimorada.
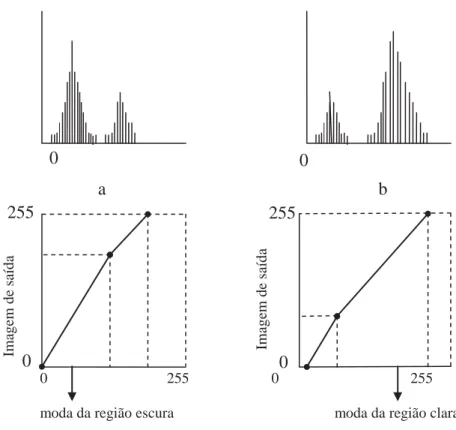
Expansão linear por partes
Introdução ao Processamento de Imagens por Sensoriamento Remoto 111 Uma grande vantagem da função linear, conforme visto nas imagens da Figura 7.6, é a preservação das taxas de refletância originais dos alvos na imagem ampliada. Dois modos se destacam no histograma da imagem original, e a opção correta parece ser um zoom parcialmente linear.
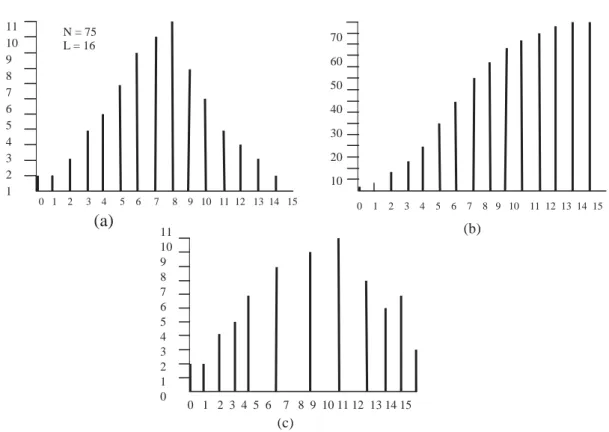
Expansão por Equalização
Finalmente, para calcular a nova distribuição do número de pixels na imagem de saída ou imagem aprimorada, relacione os valores de brilho na coluna (v) com o número de pixels na coluna (ii). Os valores de luminância não encontrados na coluna (v) são calculados com contagem de pixels igual a zero.
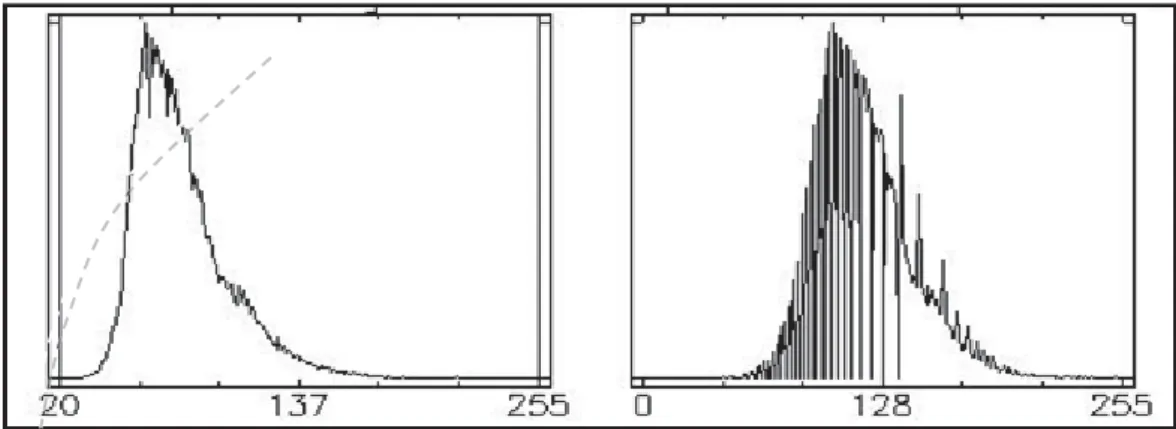
Expansão Gaussiana
Como a curva de uma distribuição normal varia de menos infinito a mais infinito, no exemplo foi usada uma faixa de desvios padrão r 3. O algoritmo determina a priori qual é a probabilidade de cada classe de brilho da imagem original ser mapeada com novos valores de brilho, dentro de uma distribuição normal.
Função raiz quadrada
Introdução ao processamento de imagens de sensoriamento remoto 119 onde g(l,p) é o valor do pixel original e G é um fator de ajuste para manter os valores de brilho resultantes dentro da faixa de quantização de imagem válida. Nesse caso, maior realce é fornecido nas áreas de intensidade média e de luz da imagem.
8.1 Cor
Introdução ao processamento de imagens de sensoriamento remoto 122, usa o espaço hexadecimal para representar a cor por atributos de brilho, matiz e saturação de cor (IHS). Existem várias outras técnicas que consideram medições de recursos de cor para configurar um algoritmo de processamento, como decorrelação de banda ou fusão de imagens com diferentes resoluções espaciais.
Fatiamento de histograma
Espaço de cor RGB
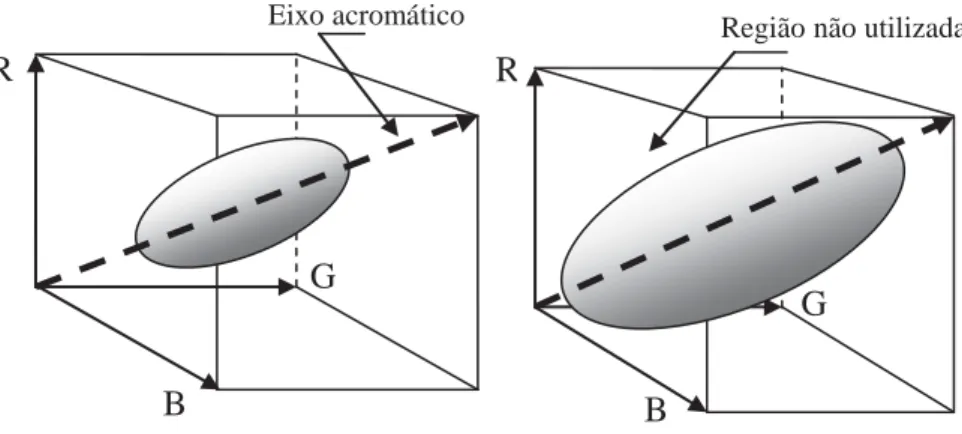
Milhões de cores podem ser obtidas variando a intensidade da luz de qualquer uma das três cores primárias. O espaço de cores desse modelo computacional de mistura de cores RGB é representado pelo cubo de cores, conforme mostrado na Figura 8.5.
Espaço de cor IHS
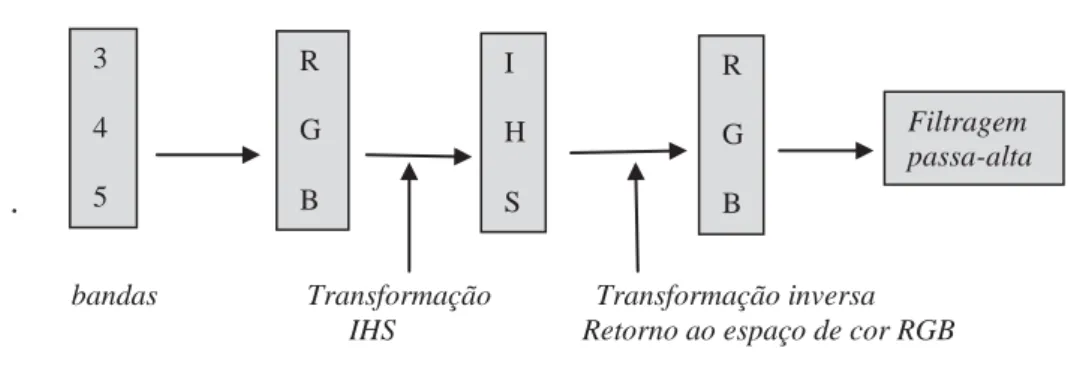
Para usar o IHS como opção de processamento de cores, siga as etapas mostradas na Figura 8.9. A intensidade I é zero, ou seja, o hexacone é um ponto preto.
Fusão de Imagens
Cada banda da imagem multiespectral (MSi) é multiplicada pela imagem de alta resolução (PAN) e dividida pela soma das bandas multiespectrais (equação 8.8). No entanto, existe uma única limitação para realizar esta fusão: a faixa espectral das bandas de entrada deve ser a mesma da banda de alta resolução espacial.
ARITMÉTICA DE BANDAS
As operações aritméticas
Introdução ao Processamento de Imagens por Sensoriamento Remoto 139 Em geral, adição e multiplicação são usadas para destacar semelhanças espectrais entre imagens de diferentes bandas ou datas, enquanto subtração e divisão são usadas para destacar diferenças espectrais de alvos.
9.2 Soma
Multiplicação
Subtração
Introdução ao Processamento de Imagens por Sensoriamento Remoto 143 Se o objetivo é fixar uma diferença de magnitude, o algoritmo de subtração simplesmente se torna uma subtração dos valores absolutos de pixel das duas imagens, independentemente de o sinal da subtração ser negativo ou positivo.
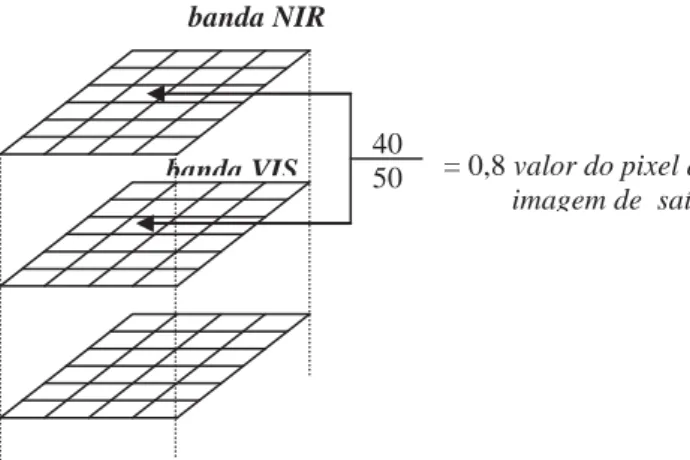
Divisão de Bandas
Introdução ao processamento de imagens por sensoriamento remoto 146 Imagine quatro tipos diferentes de alvos que possuem padrões de reflexão como o esquema desta figura. Onde L é uma constante determinada empiricamente para minimizar a sensibilidade do índice de vegetação a variações na refletância dos tipos de solo.
TRANSFORMAÇÃO POR ROTAÇÃO ESPECTRAL
Correlações de Bandas
Uma poderosa técnica de processamento de imagem foi desenvolvida para eliminar a alta correlação entre as bandas de um sensor, com perda mínima de informação. Este capítulo aborda os princípios de transformação de imagens multiespectrais no novo conjunto de componentes, primeiramente usando a técnica conhecida como Principal Component Transformation (TPC), que permite operações com qualquer número de bandas.
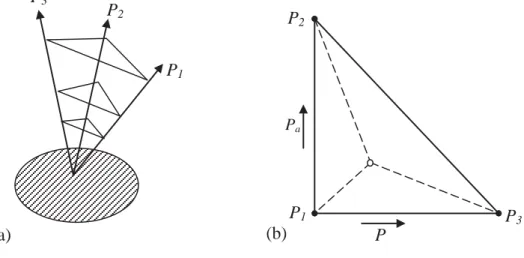
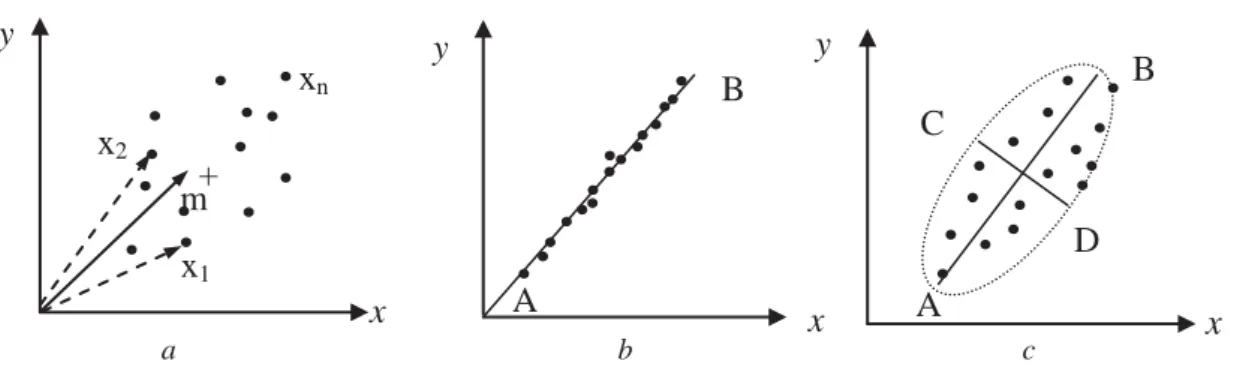
Transformação por Principais Componentes
Na Figura 10.2c, a dimensionalidade dos dados é efetivamente uma, embora o número de variáveis observadas seja, na verdade, duas. Na matriz de autovetores da Tabela 10.6, observa-se que os valores que representam as informações relacionadas à muscovita são os PC4 (maiores sinais de valores opostos).
Descorrelação de bandas
Nesta equação, x são vetores de valores de luminância da imagem original e y é o vetor de intensidade correspondente após a transformação do componente principal. Introdução ao Processamento de Imagens por Sensoriamento Remoto 171 O processo é repetido pela varredura de toda a imagem pixel a pixel conforme esquema da Figura 11.2, e este é um processo que opera a cada instante em um espaço de imagem local.
Filtro Passa-Alta
A soma de seus pesos é igual a 1, o que significa que a imagem de saída tem o mesmo ND médio da imagem de entrada (preservando a baixa frequência), enquanto a quantidade de melhoria alcançada é proporcional a K.
Filtro Passa-Baixa
Filtro de Mediana
Uma alternativa para minimizar um pouco a aparência borrada da imagem com o filtro da média é usar o filtro da mediana. Este valor extremo é eliminado pelo filtro da mediana e as arestas são mais bem preservadas do que com o filtro da média.
Filtros de Bordas Direcionais
O resultado da aplicação do filtro direcional linear na direção horizontal é apresentado na Figura 11.9, em uma área com forte presença de lineamentos geológicos. Combinando os resultados por meio de um cálculo vetorial pixel a pixel, obtém-se a magnitude do gradiente local da imagem para qualquer direção, conforme demonstrado por Schowengerdt (1997) na Figura 11.10.
Operadores Laplaciano
As máscaras 3 x 3 movem-se pixel a pixel e a detecção de bordas é mais ampla do que aquela produzida por filtros 2 x 2. A escolha de um limite baixo significa um grande número de bordas largas, enquanto um limite alto resulta em segmentos com lâminas finas.
Filtros Morfológicos
Introdução ao processamento de imagens de sensoriamento remoto 182 Com o filtro de erosão (Figura 11.14), o processo de erosão para o conjunto de X ocorre quando Bx está totalmente incluído em X.
Filtro de Textura
O uso de uma matriz de coocorrência é um dos métodos mais utilizados para análise de textura. As métricas de coocorrência usam uma matriz de dependência espacial em escala de cinza entre pixels adjacentes para calcular os valores de textura.
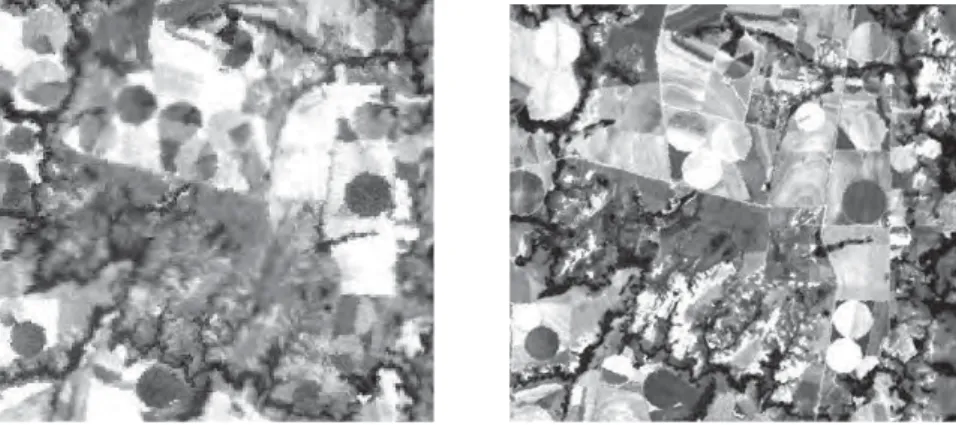
Filtragem no Domínio da Frequência
Este tipo de filtro é utilizado para obter características de detalhe na imagem (high pass), conforme mostra a Figura 11.21. Neste caso, este filtro é utilizado para obter feições regionais na imagem (passa baixa) (Figura 11.22).