Universidade Federal do Rio Grande do Norte
Centro de Tecnologia
Programa de Pós-Graduação em Engenharia Elétrica
Controle Preditivo Bilinear Aplicado a Um
Motor de Indução.
Adjair Ferreira Barros Filho
Prof. Dr. Andrés Ortiz Salazar
Orientador
Prof. Dr. André Laurindo Maitelli
Co-Orientador
Natal-RN
Adjair Ferreira Barros Filho
Controle Preditivo Bilinear Aplicado a um
Motor de Indução.
D i s s e r t a ç ã o a p r e s e n t a d a c o m o r e q u i s i t o p a r c i a l o b t e n ç ã o d o g r a u d e M e s t r e e m C i ê n c i a s d e E n g e n h a r i a E l é t r i c a .
C u r s o d e P ó s - G r a d u a ç ã o e m E n g e n h a r i a E l é t r i c a , C e n t r o d e T e c n o l o g i a , U n i v e r s i d a d e F e d e r a l d o R i o G r a n d e d o N o r t e .
O r i e n t a d o r : P r o f . D r . A n d r é s O r t i z S a l a z a r C o - O r i e n t a d o r : P r o f . D r . A n d r é L a u r i n d o M a i t e l l i
Natal-RN
Divisão de Serviços Técnicos
Catalogação da Publicação na Fonte. UFRN / Biblioteca Central Zila Mamede
Barros Filho, Adjair Ferreira.
Controle preditivo bilinear aplicado a um motor de indução / Adjair Ferreira Barros Filho. – Natal, RN, 2003.
114 p.
Orientador : Andrés Ortiz Salazar. Co-orientadora : André Laurindo Maitelli.
Dissertação(Mestrado) – Universidade Federal do Rio Grande do Norte. Centro de Tecnologia. Programa de Pós-Graduação em Engenharia Elétrica.
1. Motor de indução - Tese. 2. Controle preditivo bilinear - Tese. 3. Modelos matemáticos - Tese. I. Salazar, Andrés Ortiz. II. Maitelli, André Laurindo. III. Título.
Controle Preditivo Bilinear Aplicado a um Motor
de Indução Trifásico
Adjair Ferreira Barros Filho
Dissertação apresentada à coordenação do Curso de Pós-Graduação
em Engenharia Elétrica da Universidade Federal do Rio Grande do
Norte como requisito parcial à obtenção do grau de Mestre em
Ciências de Engenharia Elétrica.
Aprovada por:
Prof. Dr. Andrés Ortiz Salazar- UFRN
ORIENTADORProf. Dr. André Laurindo Maitelli – UFRN
CO-ORIENTADORProf. Dr. Pablo Javier Alrima – UFRN
MEMBRO DA BANCAProf. Dr. Adhemar de Barros Fontes – UFBA
MEMBRO DA BANCA – EXAMINADOR EXTERNOÀ minha esposa, Solange
Aos meus filhos, Hallysson, Jessyka e Vitor
Aos meus pais
Agradecimentos
Aos professores Andrés Ortiz, André Maitelli e Adhemar de Barros pela
dedicação, amizade e orientação neste trabalho.
Aos meus familiares e amigos pelo incentivo.
À UFRN, CNPQ e CEFET-RN pelo apoio financeiro.
Aos colegas professores da Gerência de Indústria do CEFET-RN.
E aos professores, alunos e funcionários do departamento de Pós- Graduação
em Engenharia Elétrica da UFRN pelo apoio e amizade, especialmente a Fábio
Soares, Felipe, João Maria, Fabiano, Ewerton e Paulo Sérgio pelo apoio técnico.
SUMÁRIO
Agradecimentos v
Sumário vi
Lista de símbolos e abreviaturas ix
Lista de figuras xi
Resumo xiii
Abstract xiv
CAPÍTULO I – INTRODUÇÃO
01CAPÍTULO II – CONTROLADORES PREDITIVOS
062.1 Introdução ao controle preditivo 06
2.2 Conceito 07
2.3 Modelos monovariáveis de entrada e saída 10
2.3.1 Modelos paramétricos: 11
2.3.1.1 Modelo ARX 12
2.3.1.2 Modelo ARIX 12
2.3.1.3 Modelo ARMAX 12
2.3.1.4 Modelo ARIMAX 13
2.4 Preditores: caso monovariável 13
2.4.1 Introdução 13
2.4.2 Preditores i-passos à frente para o modelo ARX 14
2.4.4 Preditor i-passos à frente para o modelo geral 18
2.4.5 Preditores i-passos à frente de sistemas com retardo 20
2.5 Funções objetivo e seu reflexo na propriedade do controlador 22
2.5.1Função objetivo de passo único 22
2.5.2 Função objetivo multi-passo 29
2.6 Controlador Preditivo Generalizado 30
2.6.1Introdução 30
2.6.2 Formulação do Controlador Preditivo Generalizado 31
2.7 Conclusões 39
3.1 Introdução 40
3.2 Modelo Bilinear 42
3.3 Uma Retrospectiva dos Controladores Preditivos Bilineares 43
3.4 Controlador Preditivo Bilinear Generalizado 46
3.4.1 Aproximação quasilinear por degrau de tempo 46
3.4.2 Controlador Preditivo Bilinear Generalizado 48
3.5 Modelo Monovariável quasilinear por degrau de tempo compensado 51
3.5.1Propriedade do termo de compensação 55
3.5.2 Estrutura do termo de compensação 56
3.6 Controlador Preditivo Bilinear Generalizado Compensado 56
3.7 Conclusões 62
CAPÍTULO IV– MODELAGEM DO MOTOR DE INDUÇÃO E
IDENTIFICAÇÃO DOS MODELOS MATEMÁTICOS PARA OS
CONTROLADORES PREDITIVOS E O (PI) 63
4.1 Introdução 63
4.2 Modelagem do Motor de Indução Trifásico 63
4.3 Modelo Vetorial com Orientação dada pelo campo do Rotor 64
4.4 Controle Vetorial Orientado pelo Campo do Rotor 65
4.5 Identificação dos Modelos Matemáticos 66
4.5.1 Modelo linear Clássico (PI) 67
4.5.2 Modelos Preditivos 70
4.6 Conclusões 71
CAPÍTULO V–
DESCRIÇÃO DA BANCADA DE TESTES
725.1 Introdução 72
5.2 Circuito de Comando e Força 72
5.3 Configuração do Inversor de freqüência 73
5.4 Software Utilizado 75
5.4.1 Descrição do software 75
5.4.2 Instrumentos Virtuais 76
5.4.3 Interface homem-máquina 76
5.5 Instrumentação para o controle e supervisão do motor 78
5.5.1 Processamento 78
5.5.2 Diagrama Funcional da Bancada 78
CAPÍTULO VI – RESULTADOS PRÁTICOS
806.1 Introdução 80
6.2 Resultados 80
6.3 Conclusões 86
CAPÍTULO VII – CONCLUSÕES GERAIS DO TRABALHO
877.1 Introdução 87
7.2 Sugestões para a continuidade dessa linha de pesquisa 89
APÊNDICE
A
90
APÊNDICE
B
97
APÊNDICE
C
105
Símbolos e Abreviaturas
Controle Preditivo
ARX: Auto-regressivo com sinal exógeno;
ARIX: Auto-regressivo Integral com sinal exógeno;
ARMAX: Auto-regressivo, Média Móvel, com sinal Exógeno;
ARMAX: Auto-regressivo, Média Móvel, com sinal Exógeno;
ARIMAX: Auto-regressivo, Integral, Média Móvel, com sinal Exógeno;
CPBG: Controlador Preditivo Bilinear Generalizado;
QLDT: Quase Linear Por Degrau de Tempo;
d: retardo do sistema;
DMC: Dynamic matrix control;
FIR: Finite Impulse Response;
FSR: Finite Step Response;
GMV: Generalised Minima Variance;
GPC: Generalised Predictive Control;
GRG: Gradiente reduzido generalizado;
LGR: Lugar Geométrico das Raízes;
LQ: Linear quadrático;
LQC: Linear quadratic control;
MPC: Model Predictive Control;
MAC: Model Algorithm Control;
Max(a,b): Máximo entre na e nb;
MPHC: Controle Preditivo Baseado em Modelo Heurístico;
NARMAX: Não linear, Auto-regressivo, Média Móvel, com sinal Exógeno;
NARIMAX:Não linear, Auto-regressivo, Integral, Média Móvel, com sinal Exógeno;
NU: Horizonte de controle;
NY: Horizonte de predição;
N1 : Horizonte mínimo de predição;
Kp: Constante de erro de posição;
PQS: Programação quadrática sucessiva;
SBPR: Sinal Binário Pseudo Randômico;
SISO: Single input single output;
λ: Fator de ponderação do controle;
+
ˆ( )
y k i : Predição i-passos à frente da saída baseada em informações disponíveis
até o instante k;
Motor de Indução
Is1, is2, is3 Correntes instantâneas nos enrolamentos do estator;
Ir1, ir2, ir3 Correntes Instantâneas nos enrolamentos do rotor;
Rs, Rr Resistências dos enrolamentos de estator e rotor, respectivamente;
Ls, Le Indutâncias próprias dos enrolamentos de estator e rotor,
respectivamente;
ωs Velocidade angular síncrona;
ω Velocidade do motor;
ψx, ψr Vetores fluxo do estator e fluxo do rotor, respectivamente;
FIGURAS
Figura n.º 2.1- Conceito de Horizonte preditivo...07
Figura n.º 2.2- Estrutura básica do MPC...09
Figura n.º 2.3-Analogia do MPC...10
Figura n.º 2.4-Diagrama de Blocos do Modelo do Processo......11
Figura n.º 2.5-Diagrama de Blocos do Sistema em Malha Fechada...23
Figura n.º 2.6-Diagrama de Blocos do Sistema em Malha Fechada...27
Figura n.º 2.7-Diagrama de blocos do modelo do processo...32
Figura n.º 2.8-Diagrama de blocos do sistema em malha fachada...38
Figura n.º 3.1- Diagrama representando o Termo de Compensação...53
Figura n.º 4.1- Modelo inverso da Máquina de Indução utilizada para Controle Vetorial...64
Figura n.º 4.2- Controle Vetorial Indireto da Máquina de Indução...65
Figura n.º 4.3- Comparação entre três diferentes sintonias para o controlador PI...67
Figura n.º 4.4- Comparação entre a média ponto a ponto e um único teste...68
Figura n.º 5.1- Circuito de Comando e Força...72
Figura n.º 5.3- Diagrama de Blocos da Bancada...74
Figura n.º 5.4- Tela de apresentação da interface homem-máquina, em labview, da bancada de testes...76
Figura n.º 5.5- Diagrama funcional da bancada de testes...77
Figura n.º 6.1- Resposta para uma Variação de +5% no valor do set-pointe...80
Figura n.º 6.2- Sinal de controle para uma variação de +5% do set-point...81
Figura n.º 6.3- Resposta para uma variação de +10% da carga...82
Figura n.º 6.4- Sinal de controle para uma variação de +10% da carga...83
Figura n.º 6.5- Resposta para uma variação de –10% da carga...84
Resumo
Controladores Preditivos Bilineares aplicado a um Motor de
Indução.
O presente trabalho baseia-se na aplicação da técnica de controle preditivo
bilinear em um motor de indução. O controle preditivo bilinear, caso particular do
controle preditivo não linear, têm despertado grande interesse, uma vez que
apresenta a vantagem de ser mais simples que o não linear em geral e mais
representativo que o linear. Um dos métodos, aqui adotado, utiliza o modelo
“quase linear por degrau de tempo” baseado no Controlador Preditivo
Generalizado. A modelagem do motor de indução é feita através do controle
Vetorial com orientação dada pelo campo do rotor indireto. O sistema é formado
por um motor de indução de 3 HP com rotor em gaiola de esquilo, acionado por
uma bancada de testes desenvolvida para esse trabalho. Foram obtidos
resultados para uma variação de +5% no valor do set-point e resultados para uma
variação de +10% e –10% no valor da carga nominal aplicada ao motor. Os
resultados comprovam uma boa eficiência dos controladores preditivos bilineares,
Abstract
Bilinear Predictive Controllers applied in an induction
motor drive
Capítulo I
Introdução
1.1 Motivação
Os motores de Indução vêm gradativamente ocupando o espaço que era
destinado aos motores de corrente contínua (CC) na aplicação em acionamentos
de alto desempenho [ Leonhard, 1996].
Entre as vantagens em relação à máquina CC, destacam-se a robustez,
baixo custo, menor freqüência de manutenção e, no caso de um motor com rotor
em gaiola de esquilo, a ausência de contatos deslizantes. Por não possuir
escovas, o que diminui a possibilidade de faiscamento, os motores de indução,
mais especificamente os de rotor tipo gaiola de esquilo, podem ser usados em
ambientes com um certo grau de risco a incêndios e explosões. No entanto, na
máquina CC o controle de velocidade se dá de uma forma bastante simples, uma
vez que o torque e o fluxo podem ser impostos à máquina de uma forma
desacoplada , ou seja, estabelecido o fluxo, o conjugado pode ser controlado
através da corrente de armadura. Desta forma os motores de CC eram os mais
preferidos em acionamentos de alto desempenho.
Na década de 70, porém, Blashcke propôs a técnica de controle vetorial,
baseada na orientação dada pelo campo do rotor, aplicada a motores de indução
[Blashcke, 1972]. A grande novidade foi à escolha do fluxo do rotor como
referência do eixo d, o que tornou possível projetar um sistema de controle
desacoplado semelhante ao da máquina de CC, quando o motor é alimentado por
Com o avanço da eletrônica de potência, mais precisamente na década de
80, e do surgimento de microprocessadores cada vez mais rápidos e de menor
custo, foi possível a implementação do controle vetorial orientado pelo campo. Na
realidade, a alimentação do motor por fontes de correntes só pode ser feita com a
utilização de um inversor de fonte de tensão (VSI) modulado por largura de pulso
(PWM) e controlado por corrente. Esse fato tornou o acionamento de alto
desempenho dos motores de indução cada vez mais competitivo com o da
máquina de CC. De fato, com o controle vetorial o motor de indução, por ter uma
menor inércia de rotor, alcança a velocidade desejada mais rapidamente obtendo
assim, um melhor desempenho transitório.
Dentre as técnicas de controle de velocidade do motor de indução, foi
escolhida para o presente trabalho, uma abordagem de controle preditivo baseado
em modelos bilineares, que é um caso particular da técnica de controle preditivo
baseado em modelos não-lineares. Devido à estrutura não-linear dos motores de
indução, a modelagem se torna mais complexa, de forma que sua simplificação
para um modelo linear requer algumas aproximações e restrições. Desta forma,
um modelo linear para representação de processos não-lineares tem uma
deficiência destacada, tendo em vista que modelos simples são freqüentemente
inadequados, e uma aproximação mais realista é necessária, [Doyle III, et al.
(1995)]. O controlador preditivo não linear, que utiliza um modelo não linear, mais
realista é freqüentemente mais complexo, sacrifica a simplicidade associada as
técnicas lineares de forma a alcançar um melhor desempenho. No entanto,
embora não exista argumentação, no conceito básico do MPC, contra a utilização
de um modelo não-linear, o seu desenvolvimento não é simples e existem
algumas questões em aberto, [Camacho & Bordons (1999)], tais como:
.a complexidade computacional para resolver o algoritmo de controle
preditivo baseado em modelos não lineares- CPNL;
.a falta de resultados teóricos no que se refere a robustez, para o sistemas
não lineares.
Como caso particular da técnica de controle preditivo baseado em sistemas
não lineares, aqueles baseados em modelos bilineares, técnica de controle
abordada no presente trabalho, tem despertado grande interesse uma vez que:
.embora pertençam a uma classe de sistemas bilineares, estes apresentam
a vantagem de ser mais simples que o não linear em geral e mais representativos
que o linear;
.a bilinearidade está presente em vários sistemas físicos e químicos,
inclusive no motor de indução;
.o modelo bilinear, utilizado pelo controlador, é linear nos parâmetros, fato
que permite a utilização do algoritmo dos mínimos quadrados recursivo na
estimação destes, ou ainda, pode-se utilizar quase a totalidade das técnicas de
identificação desenvolvidas para sistemas lineares;
Esta técnica foi desenvolvida e implementada em colunas de destilação de
tolueno por [Fontes A. B., Duarte. A. A] e teve grande êxito na implementação do
controle preditivo bilinear Compensado. Ainda, a técnica referenciada será
implementada no motor de indução trifásico, tendo em vista o comportamento não
linear, sendo, em especial, o modelo bilinear uma forma natural de representação
deste, segundo [Figalli (1984)].
Para a implementação do controle, foi montada uma bancada de testes que
é composta por um inversor (WEG), um motor de indução de 3 HP, um gerador
1.2 Objetivos do trabalho
O presente trabalho tem como objetivos principais:
- Aplicar controladores preditivos bilineares a um motor de indução trifásico;
- Implementar o controlador preditivo GPC bilinear compensado, analisando
seu desempenho em ralação aos modelos linear clássico (PI), preditivo
linear e o GPC bilinear aplicados a um motor de indução trifásico.
- Implementar uma bancada de testes, capaz de se adequar a aplicação de
diversos controladores que venham a ser desenvolvidos em outros
trabalhos de dissertação ou de final de curso.
1.3 Apresentação da Dissertação
A dissertação foi organizada segundo a ordem descrita logo a seguir:
. no capítulo 2 é mostrado um histórico referente ao controle preditivo de
uma forma geral, são abordado de forma sucinta os modelos e preditores
referentes ao controle preditivo e por fim o controlador preditivo generalizado
(GPC).
. no capítulo 3 será introduzido um estudo sobre o controlador preditivo
bilinear. Onde serão abordados os principais algoritmos existentes e a estratégia
de controle.
. no capítulo 4 será feita a modelagem matemática do motor de indução,
que utiliza as variáveis referidas ao estator ou rotor da máquina. Em seguida, será
mostrado o modelo matemático do motor de indução que usa uma abordagem
vetorial utilizando o fluxo no rotor como referência para as variáveis do modelo.
Será apresentado também o controle vetorial que consegue simplificar o modelo
do motor de indução. E por último, serão apresentados os modelos matemáticos
dos controladores PI, preditivo linear, GPC bilinear com aproximação quase linear
por degrau de tempo e GPC bilinear compensado aproximação quase linear por
. No capítulo 5 será feita uma descrição da bancada de testes, onde serão
abordados o acionamento, funcionamento, interfaces, software e problemas
ocorridos durante a implementação da bancada.
. No capítulo 6 será feita uma análise dos resultados obtidos na prática,
fazendo uma comparação entre os controladores em termos de Tempo de
Resposta e o Esforço do Controle, quando submetidos a variações no valor do
set-point e na carga acoplada ao eixo do motor.
. No capítulo 7 são apresentadas as conclusões do trabalho e as
CAPÍTULO II
CONTROLADORES PREDITIVOS
2.1 Introdução ao Controle Preditivo
Controle preditivo, nome dado à maneira pela qual a lei de controle é
calculada, refere-se a uma classe de algoritmos que calcula uma seqüência de
ajustes no sinal de controle de forma a otimizar o comportamento futuro da saída
de uma planta. Originalmente desenvolvida para atender a necessidade de
controle especializado de refinarias de petróleo, esta técnica de controle recebeu
bastante destaque na última década. Obteve grande aceitabilidade no ambiente
industrial, com uma grande variedade de aplicação em várias áreas, incluindo
indústria química, processamento de alimentos, automotiva, aeroespacial,
metalúrgica e de papel. Isto porque, os controladores preditivos têm-se mostrado
bastantes eficazes no controle de plantas monovariáveis e multivariáveis, com
retardo, de fase não mínima e instáveis, fato que caracteriza a maioria dos
processos industriais, os quais têm seus próprios critérios de desempenho e
exigência de confiabilidade. Diferentemente das técnicas de controle usuais, os
controladores preditivos baseiam-se na predição do comportamento futuro da
saída(s) do processo a ser controlado. Esta predição, por sua vez, é obtida
através de um modelo do processo, o qual supõe-se disponível. Utilizam-se então,
os valores futuros preditos da(s) saída(s) para calcular a ação de controle. Além
do mais, em contraste com outros métodos, os controladores preditivos têm-se
2.2 Conceito
O controle preditivo é uma técnica de controle, discreta no tempo, que faz
uso de um modelo explícito do processo, para calcular uma seqüência de controle
futura, tal que leve a saída predita a seguir uma dada trajetória de referência. Esse
conceito pode ser ilustrado para o caso SISO, através da Figura 2.1.
Figura 2.1 – Conceito de Horizonte Preditivo
As variáveis u(k), y(k) e r(k) representam os valores no instante atual k da
variável manipulada ou sinal de controle, da variável controlada ou saída do
processo e do sinal de referência, respectivamente. Os valores futuros dessas
variáveis são definidos pelos seguintes vetores:
[
]
[
[
]
= +
= + +
= + +
L
L
L
( ) ( 1)
ˆ ˆ( 1) ˆ( )
( 1) ( )
T
T
T
u u k u k NU
y y k y k NY
r r k r k NY
]
−
)
(2.1)
Em que:
representa o valor estimado de y(k) i-passos à frente;
+
ˆ( y k i
NY = Horizonte de predição;
NU = Horizonte de controle.
O comportamento futuro do processo é calculado dentro do horizonte de
predição NY, usando um modelo previamente determinado e validado do processo
e levando em consideração as NU ações de controle a serem fornecidas ao
As ações de controle são calculadas de forma que a saída predita obtenha
determinadas características desejadas em relação ao sinal de referência
utilizado, características estas, mensuradas através de um determinado índice de
desempenho. O sinal de referência, também conhecido como “trajetória de
referência”, pode ser considerado tanto um valor constante, como uma trajetória
filtrada por um modelo de referência, normalmente de primeira ou de segunda
ordem. O primeiro elemento da seqüência de controle obtida é aplicada ao
processo, sendo desconsiderados os demais. No instante de amostragem
seguinte, todo o procedimento é repetido, utilizando as informações medidas mais
recentes. Esta metodologia é conhecida como “Princípio do Horizonte Móvel”,
(Receding Horizont) e foi proposta por Propoi em 1963.
Com a finalidade de se quantificar a qualidade de rastreamento da saída
predita do processo em relação à trajetória de referência, utiliza-se uma “Função
Objetivo”. Esta função, normalmente, relaciona as variáveis y, u e r. Um exemplo
simples de função objetivo é:
[
]
λ= =
=
∑
+ − + 2+ 21 1
ˆ( ) ( ) . (
NY NU
j N i
J y k j r k j
∑
u k +i) (2.2)Em que:
N1 = Horizonte mínimo de predição;
NU e NY são como já definidos em 2.1.
A minimização dessa função em relação a u gera a seqüência de ações de
controle num determinado horizonte de predição. Nesse sentido, a seqüência
encontrada é ótima com relação a função objetivo que é minimizada num
determinado instante. Dessa forma, os valores futuros da diferença entre y e r são
minimizados e, portanto, quando o modelo do processo disponível o representa
fielmente, e quando o sistema não está sujeito a distúrbios, nem restrições, a
saída do processo acompanhará a “trajetória de referência”, nos instantes de
amostragem, exatamente conforme previsto. Caso contrário, haverá um erro,
A estrutura básica capaz de implementar a estratégia de Controle Preditivo,
conforme descrito, é mostrada na figura 2.2 a seguir. Nesta, o modelo é utilizado
para predizer os valores futuros das saídas da planta, baseado em valores
presentes e passados e ainda nas futuras ações de controle ótimas propostas.
Estas ações são calculadas por um otimizador, tendo em vista uma função
objetivo, que considera o erro de rastreamento futuro, como também as
restrições.
Figura 2.2 – Estrutura básica do MPC
Se o processo em questão tiver tempo morto associado, o procedimento a
ser utilizado deve ser o mesmo, exceto que o limite inferior do somatório da função
objetivo deve ser mudado. Se este for um múltiplo do período de amostragem,
então os limites passarão a ser de i = td / T até NY.
Um outro aspecto a ser observado é que o cálculo da seqüência de ações de
controle é um problema de otimização ou, mais especificamente, um problema de
minimização. Usualmente, a solução deste requer um procedimento iterativo, que,
no entanto, será evitado quando o critério é quadrático, o modelo é linear e não
existem restrições. Neste caso, existe uma solução analítica. Deve-se observar,
no entanto, que a função objetivo ideal necessitaria ser baseada em
especificações de projeto, tais como: “tempo de estabilização”; “overshoot“; “tempo de subida”; “margem de ganho”; etc. Neste contexto, o problema de
otimização resultante seria de difícil solução. Esta é, portanto, a razão pela qual
função quadrática. Com isso as especificações de projeto devem ser transladadas
para os parâmetros da função objetivo quadrática, de forma que quando esta é
minimizada, as especificações acima mencionadas, sejam atendidas.
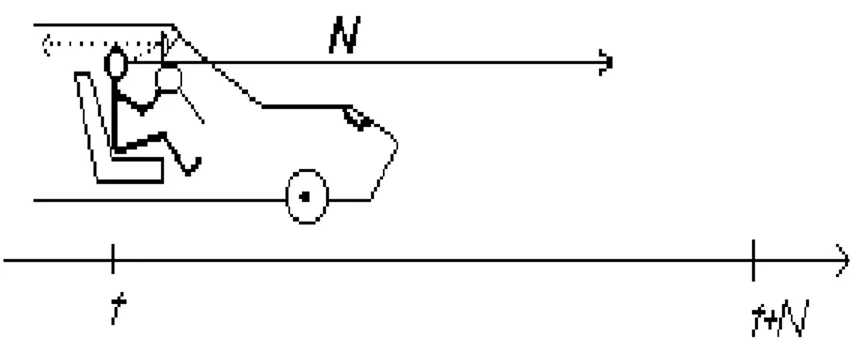
Pode-se observar ainda que a “Estratégia de Controle Preditivo” é muito
similar à utilizada no processo de dirigir um carro, conforme ilustração
apresentada em (Camacho & Bordons, 1999), mostrada na figura a seguir. Neste,
o motorista conhece a trajetória de referência desejada para um horizonte de
controle finito e considerando as características do carro, o que corresponde a um
modelo mental, decide que ações de controle executar, tais como: acelerar,
atrasar e mudar a direção, de forma a seguir uma trajetória desejada. Somente a
primeira ação de controle é executada em cada instante e o procedimento é
novamente repetido para a decisão da nova ação de controle nos mesmos moldes
do horizonte móvel.
Figura 2.3 – Analogia do MPC (Segundo Camacho & Bordons)
2.3 Modelos monovariáveis de entrada e saída
Existem diversas famílias de modelos matemáticos que podem ser utilizadas
para representar matematicamente o comportamento dinâmico de um processo,
dentre eles encontram-se modelos de entrada-saída paramétricos e
não-paramétricos mono e multivariáveis, os modelos via espaço de estados, etc.
(Goodwin e Sin, 1984). No caso em estudo, será enfocado, neste capítulo, os
modelos monovariáveis de entrada e saída. No capítulo IV, será apresentado o
caso multivariável, que é uma extensão dos modelos monovariáveis a seguir
2.3.1 Modelos paramétricos:
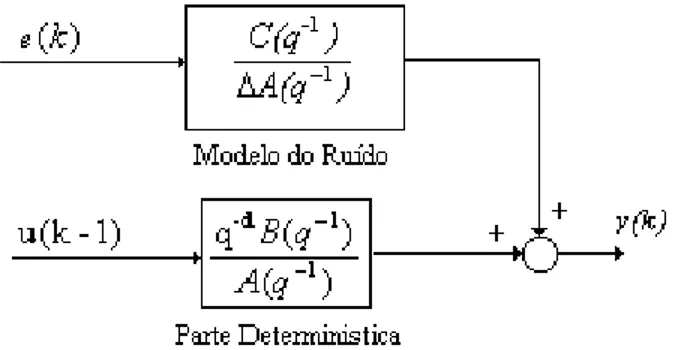
Os modelos lineares paramétricos, de uma forma geral, podem ser
representados através da expressão:
− − −
− −
= (1 1) − + 1( 1)
( ) ( 1) ( )
( ) ( ) ( )
d
q B q C q
y k u k e k
A q D q A q−1
−
−
b nc
(2.3)
[-parte determinística-] [-modelo do ruído-]
Em que: - q-1 representa o operador atraso unitário;
- y(k) é a saída do processo;
- d é o retardo, em múltiplos do período de amostragem (d ≥ 0);
- u(k) é a saída do controlador;
- e(k) é um ruído “branco” e gaussiano, com média zero e variância σ2.
Os polinômios A(q-1), B(q-1), C(q-1) e D(q-1), são dados por:
−
− −
− −
− − −
= + + + +
= + + + +
= + + + +
= + + + +
1 1 2 1 2
1 1 2
0 1 2
1 1 1
1 2
1 1 1
1 2
) 1
1
) 1
- - -na
na
- n
nb
-
-nc nd nd
A(q a q a q . . . a q B(q ) b b q b q . . . b q C(q ) c q c q . . . c q D(q d q d q . . . d q
(2.4)
Em que: na, nb, nc e ndsão os graus dos polinômios A(q-1), B(q-1), C(q-1) e
D(q-1), respectivamente.
Em termos de diagrama de blocos, tem-se que:
2.3.1.1 Modelo auto-regressivo com sinal exógeno (ARX).
Neste caso, tem-se que: na=n ; nb≤n , nc = nd =0. Com isso, o modelo resultante é:
− −
−
= 1 1 − +1 1
d
-q B(-q )
y(k) u(k ) e(k) A(q ) A(q )1
+
=1
(2.5)
ou ainda,
−1 = − −1 −
1
d
A(q ) y(k) q B(q ) u(k ) e(k) (2.6)
2.3.1.2 Modelo Auto regressivo Integral com sinal exógeno (ARIX)
Neste caso tem-se: . Isto resulta no seguinte
modelo:
= =0
na n, nb < n, nc e nd
− −
− −
= 1 1 − + 1
1
1 1
1
d
q B(q )
y(k) u(k ) e(k)
A(q ) ( + d q ) A(q )−1 (2.7)
Fazendo d1= -1, o polinômio D(q -1) corresponde à introdução da ação
integral no controlador, o qual elimina o erro de regime ao degrau. Neste caso,
D(q-1) é normalmente representado por ∆. Com isso tem-se que:
− −
−
= − +
∆
1
1 1
1 1
d
-q B(-q )
y(k) u(k ) e(k)
A(q ) A(q ) (2.8)
ou ainda,
−1 ∆ = − −1 ∆ +
1
d
A(q ) y(k) q B(q ) u(k - ) e(k) (2.9)
2.3.1.3 Modelo Auto-regressivo, Média Móvel, com sinal Exógeno (ARMAX ou
CARMA).
− −
− −
= 1 1 1 + 11
d
-q B(-q ) C(q ) y(k) u(k - ) e(k)
A(q ) A(q ) (2.10)
ou ainda,
−1 -d −1 1 +
A(q )y(k) = q B(q )u(k - ) C(q )e(k−1 ) (2.11)
2.3.1.4 Modelo Auto-regressivo, Integral, Média Móvel com sinal Exógeno
(ARIMAX ou CARIMA).
Neste caso, tem-se que: na=n ; nb≤n, nc >0e nd = 1
∆
, que corresponde a
. Com isso, tem-se que: −1 = 1=
1
-D(q ) - q
− −
−
= − +
∆
1 1
1 1 1
d
-q B(-q ) C(q ) y(k) u(k ) e(k)
A(q ) A(q ) (2.12)
ou ainda,
−1 ∆ −1 ∆ − +
1
-d
-A(q ) y(k) = q B(q ) u(k ) C(q )e(k1 ) (2.13)
2.4 Preditores: caso monovariável
2.4.1 Introdução:
Em controle preditivo, para o cálculo das ações futuras de controle, é
necessário que se faça uma predição da saída, isto é, da variável controlada. Para
tanto, utiliza-se um modelo pré-definido do processo a ser controlado. Este modelo
permite predizer a saída em t=k+i, usando as informações passadas, conhecidas,
das ações de controle e/ou saídas do processo, e as saídas futuras do controlador
a serem calculadas. Os algoritmos que efetuam esse cálculo são denominados
A predição, baseada num modelo dinâmico refere-se a previsão da saída
com um determinado instante de tempo maior que o instante de tempo atual, a
partir de informação disponíveis até o instante k.
2.4.2 Preditores i-passos à frente para o modelo ARX –Diophantine
Considere o modelo ARX, descrito anteriormente, isto é:
−1 = −1 − +
1
A(q )y(k) B(q )u(k ) e(k) (2.14) A saída y(k) i-passos à frente, obtida a partir desta equação é dada por:
−
− −
+ = B(q )11 + − +1 1 1 +
y(k i) u(k i ) e(k i)
A(q ) A(q ) (2.15)
Observa-se nesta equação que y(k +i) depende de valores passados e/ou futuros das variáveis envolvidas, isto é: y, u e e. Por outro lado, sabe-se que a
melhor estimativa de y(k+i), isto é y(kˆ +i), satisfaz a condição a seguir:
ε
+ = + − 2
ˆ min [
r
y (k i) { y (k i) r] } (2.16) cuja solução é
{
}
ε
+ = +
ˆ( ) (
y k i y k i) (2.17)
Este estimador é conhecido como estimador de Bayer ou “estimador de risco
quadrático mínimo”. Assim, quando e(k) é um ruído “branco”, gaussiano, de média
zero, a melhor estimativa de y(k+i), é o seu valor determinístico. Então, com o
objetivo de separar a dependência de y(k+i), das informações passadas e futuras,
introduz-se as seguintes identidades polinomiais, conhecidas como equação
diofantina:
− − −
− = +
1 1
1
1 i i
i
G (q ) F (q ) q
A(q ) A(q )−1 , (2.18)
−
− −
−
= +
= + +L +
1 1
1 1
1 1
0 1 1
1
. - -(i - ) i
- -(n- )
i n
F (q ) f q + . . . + f q G (q ) g g q g q
1 1 i
(2.19)
Deve-se observar que:
1) o grau de Fi(q-1) é i-1 e o de Gi(q-1) é n-1;
2) a solução desta equação é apresentada no Apêndice A, e pode ser
obtida usando uma divisão polinomial ou através de relações recursivas
entre soluções sucessivas
Assim, utilizando a equação 2.18, tem-se que:
− − − − + = + + 1 1 1 1 1
- i i i
B(q ) G (q )
y(k i) u (k + i - ) + F (q ) q e k i
A(q ) A(q )−1 ( ) (2.20)
Que pode ser rescrita na forma:
−
− −
+ = 1 1 + 1
1 1 1
-- i
i
B(q ) G (q )
y(k i) u(k + i - ) + F (q )e(k + i) e(k)
A(q ) A(q ) (2.21)
Da equação (2.14), tem-se que:
−
= 1 − -1) 1
e(k) A(q )y(k) B(q u(k− ) (2.22)
Então substituindo em (2.20), resulta em:
(
)
− −
− −
− −
+ = 1 + − + 1 + + 1 1 − −
1 1 1 1
i i
B(q ) G (q )
y(k i) u(k i ) F(q )e(k i) A(q )y(k) B(q )u(k )
A(q ) A(q )
−1
(2.23)
Que pode ser reescrita da forma:
− − − − − − + = − + − + 1 1 1 1 1 1 1 i -i i G(q )
y(k i) B(q ) q u(k i ) F (q )e(k + i) + G (q )y(k) A(q ) A(q )
1 (2.24)
Tendo em vista a que:
− − − − = 1 1 1 1 1 )
-i i -i
G (q )
q F
A(q ) A(q ) (q (2.25)
− −
+ = 1 1 + − +1 -1 + + 1 )
i i i
y(k i) B(q )F (q )u(k i ) F (q )e(k i) G (q )y(k- (2.26) Por outro lado como:
−1 = + −1+ −2+ + 0 1 2
-nb nb
B(q ) b b q b q . . . b q e −1 = +1 1 −1+ + −1 - i−
i i
F (q ) f q . . . f q( 1)
−1) nb i 1 + − 1 nb i + − 1 nb i
− −1)
− −1)
−1
)
1 então,
α α α
− − − − +
+ −
= + + +
1 1 1
0 1 1
(nb i i
B(q )F (q ) q . . . q , · (2.27)
ou seja, é um polinômio de grau (nb+i-1), o qual pode ser rescrito na
forma:
−1 −
i
B(q )F (q )
α α α α α α
− − − − − − − − − −
− + +
= + + + + + +L +
1 1 1 1) 1
0 1 1 1 1
(i i i i nb
i i i i
B(q )F (q ) q . . . q q q q
Ou ainda:
α α α α α α
− − − − − − − −
− + +
= + + + + + +L +
1 1 1 1) 1
0 1 1 ( 1 1 )
(i i nb
i i i i
B(q )F (q ) q . . . q q q q
Definindo agora
α − α α − α
−
= + + +
1 1
0 1 1 (i i
(q ) q . . . q (2.28)
β − α α − α
+ + −
= + + +
1 1
1 1
(nb i i nb i
(q ) q . . . q (2.29) tem-se que:
α β
−1 −1 = −1 + −i i
B(q )F (q ) (q ) q (q ) (2.30) Substituindo esta equação na equação 2.26 do preditor, resulta em:
α − −β − −
+ = 1 + 1 + − + 1 + + 1
[ i ( ] 1 i i
-y(k i) (q ) q q ) u(k i ) F (q )e(k i) G (q )y(k) (2.31) Que pode ser rescrita na forma:
β − α −
+ = 1 −1 -1) ( )+ 1 + 1 + -1 +
i i
y(k i) (q )u(k ) + G (q y k (q )u(k i - ) F (q )e(k i (2.32) Tendo em vista os graus dos polinômios β(q-1), Gi(q-1), α(q-1) e Fi(q-1), tem-se
então que:
β − α α α
+ +
− = − + − + + +
1
1 1
1 i 1 i 2 n b i
-(q )u (k ) u (k ) u(k ) . . . u (k - nb )
( )
que
)
n
α 1 ( )
1
) −
−
− +L + − +
1
0 1 ( 1) 1 ( 1 i
G (q )y(k) = g y(k) + g y k g y k n , que corresponde a valores de y até o instante k, portanto valores também disponíveis;
α − α α
−
+ − = + − + + − + L +
1
0 1
1 1) 2 i
(q )u (k i ) u (k i u (k i ) u k que contém valores de u, do instante k até o instante (k+i-1), portanto, não
disponíveis. Estes valores correspondem a valores futuros de u(k);
−
−
+ = + + + − +L + +
1
1
) ( 1 1
i i
F (q )e(k i e k i) f e(k i ) f e(k ), que contém somente valores futuros de e(k).
Desta análise, pode-se escrever a equação do preditor, separando futuro e
passado, na forma:
β − − α −
+ = 1 − + 1 + 1 + + 1 +
1 i 1 i
-y(k i) (q )u(k ) G (q )y(k) (q )u(k i - ) F (q )e(k i (2.33) [...passado...] [...futuro...]
Observando-se a equação anterior, verifica-se que e(k) aparece somente
com valores futuros. Tendo em vista, o que já foi mencionado anteriormente, o
estimador de risco quadrático mínimo, isto é, o valor estimado de y(k+i) é
{
}
ε
+ = +
ˆ( ) (
y k i y k i) . Sendo assim, o preditor i-passos à frente de mínima
variância é dado por:
{
}
ε β − α − −
+ = 1 − + 1 + 1 + − + 1 +
ˆ - 1 1
i i
y(k i) (q )u(k ) G (q )y(k) (q )u(k i ) F (q )e(k i) (2.34) ou ainda,
{
}
ε β − α − ε −
+ = 1 − + 1 + 1 + − + 1 +
ˆ - 1 1 {
i i
y(k i) (q )u(k ) G (q )y(k) (q )u(k i ) F (q )e(k i)} (2.35)
Como,
{
}
{
}
{
}
{
}
ε − ε ε ε
−
+ = + + + − +L + +
1
1 1 1
i i
F (q )e(k i) e(k i) f e(k i ) f e(k 1 (2.36) )
e ainda, tenho em vista que e(k) é por hipótese um ruído “branco”, gaussiano, de
média zero, isto é:
}
{
+ =0então,
β − − α −
+ = 1 − + 1 + 1 + −
ˆ( ) ( ) ( 1) i( ) ( ) ( ) (
y k i q u k G q y k q u k i 1) (2.38)
2.4.3 Preditor i-passos à frente para o modelo geral.
Considerando agora o modelo geral:
− −
− −
= ( 11) − + 1( 1)
( ) ( 1) ( )
( ) ( ) ( )
B q C q
y k u k e k
A q D q A q−1 (2.39)
A saída y k( ) i-passos à frente é dada por:
− −
− − −
+ = ( 11) + − + 1( 1) 1 +
( ) ( 1) (
( ) ( ) ( )
B q C q
y k i u k i e k i
A q D q A q ) (2.40)
Utilizando a identidade polinomial:
− −
− −
− − = + − −
1 1
1
1 1 1
( ) ( )
( )
( ) ( ) ( ) ( )
i i i
C q G q
F q q
D q A q D q A q 1 (2.41)
sendo grau{ ( −1)}= i-1 e grau
i
F q { ( −1)}=max( − , + −1)
i c a
G q n i n nd . Substituindo na equação anterior, tem-se que:
− − − − − − + = + − + + + 1 1 1 1 1 ( ) ( )
( ) ( 1) ( ) (
( ) ( ) ( )
i i i
B q G q
y k i u k i F q q e k i
A q D q A q−
1 ) (2.42)
Ou ainda,
− −
−
− − −
+ = 1 + − + 1 + 1 +
1 1 1
( ) ( )
( ) ( 1) ( ) ( ) (
( ) ( ) ( )
i
i
B q G q
y k i u k i e k F q e k i
A q D q A q )
)
(2.43)
Da equação (2.39) tem-se que:
A q( −1) (D q−1) ( )y k =B q( −1) (D q−1) (u k− +1) C q( −1) (e k (2.44) tal que:
− − − −
− −
= ( 1) (1 1) − ( 1) (1 1)
( ) ( ) ( 1)
( ) ( )
A q D q B q D q
e k y k u k
Substituindo na equação (2.43), resulta em: − − − − − − − − − − − − + = + − + − − + +
1 1 1 1 1
1 1 1 1 1
1
( ) ( ) ( ) ( ) ( ) ( )
( ) ( 1) ( ) ( 1)
( ) ( ) ( ) ( ) ( )
( ) ( )
i
i
B q G q A q D q B q D q
y k i u k i y k u k
A q D q A q C q C q
F q e k i
1 (2.46) Ou ainda, − − − − − − − − + = + − − − + + + +
1 1 1
1 1 1
1
( ) ( ) ( ) ( )
( ) ( 1) ( 1) ( )
( ) ( ) ( ) ( )
( ) ( )
i i
i
B q G q B q G q
y k i u k i u k y k
A q A q C q C q
F q e k i
−1 1
(2.47)
Esta equação pode ser reescrita na forma:
− − − − − − − − − − − − − + = − + − + + + +
1 1 1 1
1 1 1 1 1
1
1 1
( ) ( ) ( ) ( )
( ) ( 1)
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) i i i i
B q D q C q G q
y k i q u k i
C q D q A q A q D q G q
y k F q e k i C q
(2.48)
Tendo em vista a equação (2.41), tem-se que:
− − − −
−
− −
+ = 1 1 1 + − + 1 + 1 +
1 1
( ) ( ) ( ) ( )
( ) ( 1) ( ) ( ) (
( ) ( )
i i
i
B q D q F q G q
y k i u k i y k F q e k i
C q C q ) (2.49)
Utilizando-se agora a seguinte identidade polinomial:
− − − −
− −
− = +
1 1 1
1 1 ( ) ( ) ( ) ( ) ( ) ( ) ( ) i i i
B q D q F q I q H q q
C q C q−
1 1 i
) ) 1
(2.50)
em que e são polinômios de graus i-1 e max ( , ,
respectivamente, e substituindo-se em (2.49), tem-se que: −1
(
i
H q I qi( −1 nb+n nd c)−
− −
− −
− −
+ = 1 − + 1 + 1 + − + +
1 1
( ) ( )
( ) ( 1) ( ) ( ) ( 1) ( ) (
( ) ( )
i i
i i
I q G q
y k i u k y k H q u k i F q e k i
C q C q
1
) (2.51)
− −
−
− −
+ = 1 − + 1 + 1 + −
1 1
( ) ( )
ˆ( ) ( 1) ( ) ( ) (
( ) ( )
i i
i
I q G q
y k i u k y k H q u k i
C q C q 1)
)
(2.52)
2.4.4 Preditores i-passos à frente de sistemas com retardo
Em um sistema com um retardo de dinstantes de amostragem, uma entrada
u(k), gerado em t tem efeito na saída y somente a partir do instante . Então, na estratégia de controle preditivo, a seqüência de controle
deve ser calculada de forma que a saída predita do
processo alcance a trajetória desejada definida por
. Desta forma, utilizando preditores i-passos à frente, na
presença de retardo, será efetuada a predição
=k −1) d L ( 1 + ( NY
= + +1
t k d L
( ), , (
u k u k
+ + L
( 1
r k d
+NY −
+ +
ˆ y k d
), ,r k
+
ˆ
) y k( NY
)
+
ˆ( )
y k i como função de
, com i d , sendo o “horizonte de predição”. Isto
significa que na existência de retardo o horizonte de predição deve satisfazer:
. Considere, então, o sistema descrito por:
+ − u k i d
≥ +1
NY d
−
( 1) = +1,L ,NY NY
−1 = − −1 −
( ) ( ) d ( ) ( 1) (
A q y k q B q u k +e k) (2.53) Então:
− −
− −
+ = d B(q )11 + − +1 1 1
y(k i) q u(k i ) e(k + i
A(q ) A(q ) ) (2.54)
Ou ainda,
−
−
+ = B(q )11 + − − +1 1
y(k i) u(k i d ) e(k + i
A(q ) A(q )−1 ) (2.55)
com i ≥ +d 1
Utilizando a identidade polinomial
− − − − = + 1 1 1 1 ( ) ( ) ( ) i i i G q F q q
A q A q−1 ( )
em queF q( −1 e G q são polinômios de graus (i-1) e (n-1), respectivamente.
i ) )
−1 ( i Tem-se que: − − − − − + = + − − + + + 1 1 1 1 ( ) ( )
( ) ( 1) ( ) (
( ) ( )
i i i
B q G q
y k i u k i d F q q e k i
A q A q−1 ) (2.57)
Ou ainda,
− −
−
− −
+ = 1 + − − + 1 + 1 +
1 1
( ) ( )
( ) ( 1) ( ) ( ) (
( ) ( )
i
i
B q G q
y k i u k i d e k F q e k i
A q A q )
− )
(2.58)
Como
− − −
= 1 − 1
( ) ( ) ( ) d ( ) ( 1
e k A q y k q B q u k (2.59) então: − − − − − − − + = + − − − − − + + + +
1 1 1
1
1 1
1
( ) ( ) ( )
( ) ( 1) ( 1) ( ) ( )
( ) ( )
( ) ( )
i
i
i
B q B q G q
y k i u k i d u k d G q y k
A q A q
F q e k i
(2.60) ou ainda, − − − − − − − + = − + − − + + + + 1 1 1 1 1 1
1 ( )
( ) ( ) ( 1) ( ) ( )
( ) ( ) ( ) ( ) i i i i G q
y k i B q q u k i d G q y k
A q A q F q e k i
(2.61)
Tendo em vista a identidade polinomial (2.56), tem-se que:
− − − −
+ = 1 1 + − − + 1 + 1 +
( ) ( ) (i ) ( 1) i( ) ( ) i( ) (
y k i B q F q u k i d G q y k F q e k i)
)
(2.62)
ou ainda,
− − − − −
+ = 1 1 − + 1 + 1 +
( ) i d ( ) (i ) ( 1) i( ) ( ) i( ) (
y k i q B q F q u k G q y k F q e k i (2.63) Lembrando que ( −1) ( −1)=α0 +α1 −1+L +α + −1 −(nb i
i
B q F q q q + −1)
nb i
)
β −1
)
, então
refere-se somente a valores passados de u(k). Portanto,
quando i d y(k+i) dependerá também de valores futuros de u . Fazendo: −1 −1 −
( ) (i ) ( 1
B q F q u k ≥ +1,
α
−1 −1 = −1 + − −( )
( ) (i ) ( ) i d (
tem-se que:
α
− − −β
− − −
+ = 1 + ( ) 1 + − − + 1 + 1 +
( ) ( ) i d ( ) ( 1) i( ) ( ) i( ) (
y k i q q q u k i d G q y k F q e k i)
)
1)
)
1 1)
(2.65)
ou ainda,
β − − α − −
+ = 1 − + 1 + 1 + − − + 1 +
( ) ( ) ( 1) i( ) ( ) ( ) ( 1) i( ) (
y k i q u k G q y k q u k i d F q e k i (2.66)
E o preditor i-passos à frente, de mínima variância é:
β − − α −
+ = 1 − + 1 + 1 + − −
ˆ ( ) ( ) ( 1) i( ) ( ) ( ) (
y k i q u k G q y k q u k i d (2.67)
Neste caso, a análise do erro de predição é dado por:
−
∈( + =) ( + −) ˆ( + =) ( 1) ( +
i
k i y k i y k i F q e k i (2.68) Ou ainda,
−
∈(k + =i) e k( + +i) f e k1 ( + − +i 1) L +f e ki ( + (2.69)
Se e(k) é um ruído “branco”, com
ε
{
e k( +i)}
=0, (2.70)e variância unitária, então a variância do erro de predição é dada por:
Var{ (∈ k+i) }2 = +1 f12+f22+L +fi−21 (2.71) Esta equação mostra que a variância do erro de predição aumenta à medida
que o horizonte de predição cresce.
2.5 Funções Objetivo e seu reflexo na propriedade do controlador
Em controle preditivo, a minimização de uma “Função Objetivo” produz uma
lei de controle preditiva, a qual é caracterizada pela escolha dessa função.
2.5.1 Função Objetivo de Passo Único:
2.5.1-a – Função objetivo baseada no erro de rastreamento
Neste caso, trata-se de uma função objetivo simples que considera somente
[
]
= + − + 2
ˆ( 1) ( 1)
J y k r k (2.72) Nesta função, somente uma previsão é usada, que é y(kˆ +1). Por isto, esta é
denominada de “Função Objetivo de Passo Único”. Para mostrar que tipo de
controlador é obtido quando a função objetivo, acima definida, é utilizada,
considere o modelo ARX, cujo preditor 1-passo à frente é dado por:
β − α −
+ = 1 − + 1 +
1
ˆ( 1) ( ) ( 1) ( ) ( ) ( ) (
y k q u k q u k G q−1 y k)
1 )
−1
1)
(2.73)
Ou ainda,
− −
+ = 1 +
1
ˆ( 1) ( ) ( ) ( ) (
y k a q u k G q y k (2.74) com:
(2.75)
α β
−1 = −1 + −1
( ) ( ) ( )
a q q q q
Das condições de otimalidade, ou seja derivando (2.72) com respeito a u,
após substituição de (2.74) e igualando a zero, conclui-se que a função objetivo é
minimizada quando y(kˆ + =1) r k( + . Isto produz a seguinte lei de controle:
−
−
+ −
= 1 1
1
( 1) ( ) ( ( )
( ) r k G q y k u k
a q
)
(2.76)
Deve-se observar que é necessário o conhecimento antecipado da trajetória
de referência a ser seguida. Desta lei de controle pode-se chegar ao seguinte
sistema em malha fechada:
A análise da malha fechada mostra que: − − − − − − − − − − − − − − − = + + + + 1 1
1 1 1
1 1 1 1 1 1
1 1
1 1 1 1
( ) 1
( ) ( ) ( )
( ) ( 1) ( )
( ) ( ) ( ) ( )
1 1
( ) ( ) ( ) ( )
q B q
a q A q A q
y k r k e k
q B q G q q B q G q
a q A q a q A q
(2.77) Ou ainda, − − − − − − − − − − − − − = + + + + 1 1
1 1 1 1 1 1 1
1 1 1 1 1 1
( )
( ) ( 1)
( ) ( ) ( ) ( )
( )
( )
( ) ( ) ( ) ( )
q B q
y k r k
a q A q q B q G q a q
e k a q A q q B q G q
+
(2.78)
Da equação do modelo, tem-se que:
−
− −
+ = ( 11) + 1 1 +
( 1) ( ) ( 1
( ) ( )
B q
y k u k e k
A q A q ) (2.79)
Tendo em vista a identidade polinomial 2.56, tem-se que:
− −
− −
+ = 1 + 1 + + 1 1
1 1
( ) ( )
( 1) ( ) ( ) ( 1) (
( ) ( )
B q G q
y k u k F q e k e k
A q A q−1 ) (2.80)
Tendo em vista agora que e k( )= A q( −1) ( )y k −B q( −1) (u k −1), então:
−
− − − −
−
+ = 1 − 1 1 + 1 + 1 +
1 1 1
1
( )
( 1) 1 ( ) ( ) ( ) ( ) ( ) ( 1 ( )
B q
y k q G q u k G q y k F q e k
A q ) (2.81)
Com isso tem-se que:
−
− − −
−
+ = 1 − 1 1 + 1
1 1
1
( )
ˆ( 1) 1 ( ) ( ) ( ) (
( ) B q
y k q G q u k G q y k
A q ) (2.82)
e ainda:
−
− −
−
= 1 −
1 1
1 1
( )
( ) 1 ( )
( ) B q
a q q G q
A q
−
1 (2.83)
−
− − − − − − −
− − +
1
1 1 1 1 1 1
1 1
1
( )
1 ( ) ( ) ( ) ( ) (
( ) B q
q G q A q q B q G q B q
A q =
1
) (2.84)
Substituindo esse resultado na equação da saída do sistema em malha
fechada, tem-se que:
− − −
−
− −
−
= 1 + + 1 1 1 1
1 1
( ) [1 ( )]
( ) ( 1) ( )
( ) ( )
B q q G q
y k q r k e k
A q B q (2.85)
Ou ainda, − − − − − = + + − 1 1 1 1 1 1
1 ( )
( ) ( 1) ( )
( ) ( ) q G q
y k q r k e k
A q A q (2.86)
Que também pode ser escrita na forma,
−
= 1 + +
1
( ) ( 1) ( ) ( )
y k q r k F q−1e k
)
(2.87)
Deste resultado pode-se concluir que:
1. a lei de controle obtida da minimização da função objetivo de passo único,
impõe a colocação dos pólos em malha fechada exatamente nos zeros da
função de transferência do processo, isto é: raízes de . Com isto,
pode-se concluir que para processos de fase não mínima ou com zeros
próximos ao circulo unitário, esta lei de controle é inviável; −1
(
B q
2. na ausência de ruído, a equação (2.87) mostra que a saída do processo
rastreia a referência desejada em um tempo mínimo, que neste caso é o
período de amostragem. Neste sentido, o controlador é idêntico ao
controlador dead-beat e, portanto, a saída deste, isto é u(k), geralmente apresenta valores elevados.
2.5.1-b Função objetivo baseada no erro de rastreamento e na ponderação
do sinal de controle.
Neste caso, a função objetivo é da forma:
[
]
ρ= + − + 2+ 2
ˆ( 1) ( 1) ( )
E assim, uma condição necessária de otimalidade que pode ser usada na
obtenção da lei de controle é:
[
]
∂ ∂ ρ
∂ ∂ + = + − + + = ˆ( 1) ˆ
2 ( 1) ( 1) 2 ( ) 0
( )
J y k
y r k u k
u u k (2.89)
o que implica em:
∂
ρ ∂
+ = −1 ˆ + − + ˆ
( ) [ ( 1) ( 1)]
( )
y k u k y k r k
u k ( 1) ) (2.90) Como: − −
+ = 1 + 1
1
ˆ( 1) ( ) ( ) ( ) (
y k a q u k G q y k (2.91) então, ∂ ∂ + = 0 ˆ( 1) ( ) y k b
u k (2.92)
uma vez que ∂
∂ =
( ) 0 ( )
y k
u k e que , conforme as equações (2.28)
e (2.81).
−1 −1 = 1
B(q )F (q ) a(q )−1
Isto resulta em:
ρ
= − + − + 0
1 ˆ
( ) [ ( 1) ( 1)]
u k y k r k b (2.93)
Ou ainda,
ρ − −
= − 1 + 1 − +
1
1
( ) ( ) ( ) ( ) ( ) ( 1)
u k a q u k G q y k r k b0 (2.94)
Reescrevendo esta equação, tem-se que :
ρ − ρ
+ = + − 1 0 1 1
1 b a q( ) u k( ) r k( 1) G q1( −1) ( )y k b0 (2.95)
ρ ρ − − = + − + + 1
0 0 1
1
0 0
( )
( ) ( 1) ( )
( ) ( )
b b G q
u k r k y k
b a q b a q−1 (2.96)
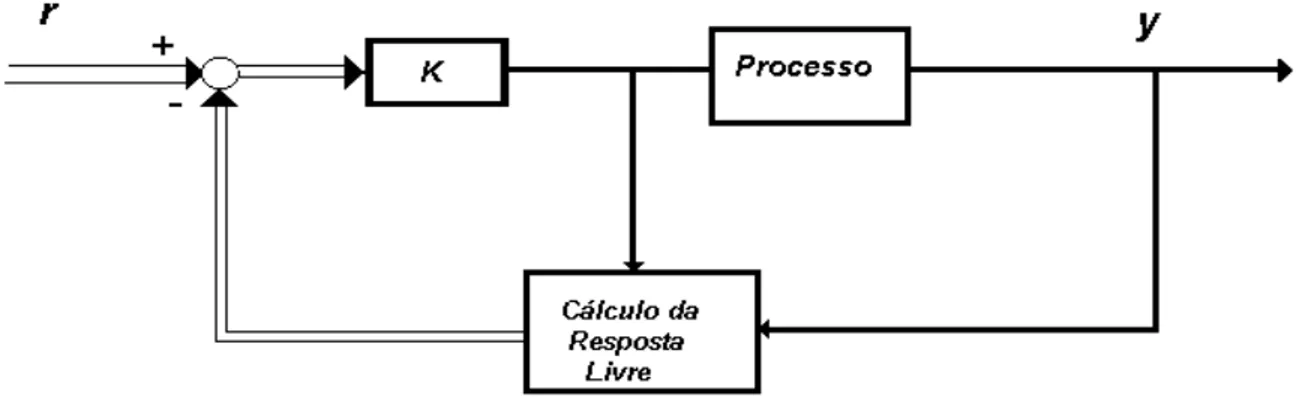
Chega-se assim ao seguinte diagrama de blocos:
Figura 2.6 – Diagrama de Blocos do Sistema em Malha fechada
Do diagrama de blocos e substituindo a expressão de a −1
q
( ) obtém-se:
ρ ρ ρ − − − − − + = + + + + 1 1 1 1 1 1 ( )
( ) ( 1) ( )
( ) ( )
1 1
( ) ( )
q boB q
y k r k e k
A q A q
boB q boB q
−1 (2.97)
ou ainda,
ρ ρ ρ − − − − − − − + = + + + +
1 1 1
1 1 1 1
( ) ( )
( ) ( 1) ( )
( ) ( ) ( ) ( )
boB q q boB q
y k r k e k
boB q A q boB q A q (2.98)
Da equação anterior pode-se concluir que:
1. os pólos de malha fechada dependem da ponderação ρ sobre a ação de
controle. Quando ρ>0 e pequeno, tem-se que os pólos de malha fechada
estarão próximos aos zeros do processo e assim para sistemas de fase não
mínima a lei de controle é inviável;
2. quando ρ>0 , a variância da saída do processo é maior do que a variância do