UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE CENTRO DE CIˆENCIAS EXATAS E DA TERRA
DEPARTAMENTO DE F´ISICA TE ´ORICA E EXPERIMENTAL PROGRAMA DE P ´OS-GRADUAC¸ ˜AO EM F´ISICA
Universalidade em Sistemas da Mecˆ
anica
Estat´ıstica de N˜
ao Equil´ıbrio com Estados
Absorventes e Percolac
¸˜
ao Geogr´
afica
Sharon Dantas da Cunha
Orientador: Prof. Dr. Luciano Rodrigues da Silva
Tese de doutorado apresentada ao Departamento de F´ısica Te´orica e Experimental da Universidade Federal do Rio Grande do Norte como requisito parcial `a obten¸c˜ao do grau de DOUTOR em F´ISICA.
Para Pessoas Especiais:
Agradecimentos
Agrade¸co a Deus por ter me iluminado durante este trabalho.
Ao Professor Luciano Rodrigues da Silva pela orienta¸c˜ao segura e competente.
Agrade¸co tamb´em aos Professores, Ronald Dickman (UFMG), Fernando Dantas Nobre (CBPF), Umberto Laino Fulco (UFRN), Jos´e Soares de Andrade J´unior (UFC), Hans Hermann (UFC), pelas contribui¸c˜oes e publica¸c˜oes desta tese.
Aos professores do Departamento de F´ısica que deram contribui¸c˜oes `a minha forma¸c˜ao e carreira cient´ıfica.
Aos colegas do Departamento de F´ısica da UFRN e da Petrobras.
Aos colegas do bacharelado em F´ısica, Darlan, F´abio Fereira, Samyr J´acome e Thiago Ribeiro.
Aos Funcion´arios do DFTE, em especial Celina e Jacira, pelos servi¸cos prestados.
Resumo
Sistemas Complexos tˆem despertado bastante interesse na comunidade cient´ıfica nestas duas ´ultimas d´ecadas. Exemplos desta ´area s˜ao os Autˆomatos Celulares, dentre os quais citamos o de Domany-Kinzel (ACDK) e o Processo de Contato (PC) que estudaremos no primeiro cap´ıtulo desta tese. Determinamos a criticalidade destes sistemas usando o M´etodo de Busca Autom´atica e o Regime de Tempo Curto (RTC). Os nossos resultados confirmaram que o ACDK e o PC pertencem a classe de universalidade da Percola¸c˜ao Direcionada.
No segundo cap´ıtulo, estudamos a difus˜ao de part´ıculas em dois modelos de Pilhas de Areia Estoc´asticas. Caracterizamos a difus˜ao atrav´es da constante de difus˜aoD, definida atrav´es da rela¸c˜ao h(∆x)2i = 2Dt. Os resultados das nossas simula¸c˜oes computacionais
(colapsos de dados e RTC) mostraram que esta constante pode usada para estudar as propriedades cr´ıticas. Ambos os modelos pertencem a classe de universalidade da per-cola¸c˜ao direcionada conservativa. Tamb´em estudamos o comportamento do deslocamento quadr´atico da posi¸c˜ao no tempo que ´e dependente da configura¸c˜ao inicial e do valor dep. No terceiro, criamos um modelo num´erico, denominado de ”Percola¸c˜ao Geogr´afica”, para estudar as linhas divis´orias, fractais cujas aplica¸c˜oes est˜ao nas mais distintas ´areas. Neste modelo, preenchemos a rede com valores entre 0 e 1 a partir de uma distribui¸c˜ao de probabilidade, ordenamos estes valores, sempre guardando a sua localiza¸c˜ao, e procuramos o s´ıtio pk que faz a rede percolar. Quando encontramos este s´ıtio, o retiramos da rede,
Abstract
Complex systems have stimulated much interest in the scientific community in the last twenty years. Examples this area are the Domany-Kinzel cellular automaton and Contact Process that are studied in the first chapter this tesis. We determine the critical behavior of these systems using the spontaneous-search method and short-time dynamics (STD). Ours results confirm that the DKCA e CP belong to universality class of Directed Percolation.
In the second chapter, we study the particle difusion in two models of stochastic sandpiles. We characterize the difusion through diffusion constant D, definite through in the relation h(∆x)2i = 2Dt. The results of our simulations, using finite size scalling
and STD, show that the diffusion constant can be used to study critical properties. Both models belong to universality class of Conserved Directed Percolation. We also study that the mean-square particle displacement in time, and characterize its dependence on the initial configuration and particle density.
In the third chapter, we introduce a computacional model, called ”Geographic Perco-lation”, to study watersheds, fractals with aplications in various areas of science. In this model, sites of a network are assigned values between 0 and 1 following a given probability distribution, we order this values, keeping always its localization, and searchpk site that
Sum´
ario
Agradecimentos ii
Resumo iii
Abstract iv
Introdu¸c˜ao 1
1 Autˆomato Celular de Domany-Kinzel, e Processo de Contato 7
1.1 Introdu¸c˜ao . . . 7
1.2 M´etodo de Busca Autom´atica. . . 10
1.3 Regime de Tempo Curto . . . 12
1.4 Autˆomato Celular de Domany-Kinzel . . . 14
1.5 Processo de Contato. . . 29
1.6 Conclus˜oes . . . 37
2 Pilhas de Areia 38 2.1 Introdu¸c˜ao . . . 38
2.2 Modelos . . . 39
2.3 Simula¸c˜oes Monte Carlo . . . 41
2.4 Conclus˜oes . . . 56
3 Percola¸c˜ao Geogr´afica 57 3.1 Introdu¸c˜ao . . . 57
3.2 Modelo . . . 60
3.4 Resultados . . . 69 3.5 Conclus˜oes . . . 74
4 Conclus˜oes e Perspectivas 75
4.1 Conclus˜oes . . . 75 4.2 Perspectivas . . . 76
Lista de Figuras
1 Modelo da pilha de areia no qual surgem avalanches de v´arios tamanhos devido a ausˆencia de escala. . . 2 1.1 Interpreta¸c˜ao dos comprimentos de correla¸c˜ao ν⊥ e νk nas regi˜oes subcr´ıtica
(esquerda) e supercr´ıtica (direita). Nas figuras A e B mostramos como o
aglo-merado cresce a partir de um s´ıtio ativo. Na figura C e D, mostramos como o
aglomerado cresce quando a rede est´a totalmente ocupada. As escalas indicadas
para ξk eξ⊥devem ser interpretadas como m´edia de v´arias realiza¸c˜oes [1]. . . . 9 1.2 Evolu¸c˜ao temporal do M´etodo de Busca Autom´atico. a) Na regi˜ao cr´ıtica o
sistema fica oscilando em torno de um valor m´edio. b)Amplia¸c˜ao (zoom) da
parte tracejada. . . 11 1.3 Diagrama de Fases para o ACDK, mostrando os resultados obtidos por
apro-xima¸c˜ao por s´ıtio e por par, e os dados obtidos por simula¸c˜ao computacional
[2]. . . 15 1.4 Diagrama de fases para o ACDK. Neste diagrama podemos ver as duas fases, a
congelada e a ativa. Neste diagrama destacamos alguns pontos conhecidos na
literatura. . . 16 1.5 Comportamento do MBA para diferentes de tempos de relaxa¸c˜ao trel.. . . 17
1.6 Extrapola¸c˜ao no tempo de relaxa¸c˜ao trel. O resultado que obtemos ´e o valor de
p1 para trel → ∞para um tamanho fixo. . . 18
1.7 Extrapola¸c˜ao para tamanho infinito (L → ∞) para p2 = 0,0 (figura maior), e
p2= 0,5 (figura menor). . . 19
1.9 Diagrama de Fases da ACDK. Neste diagrama evidˆenciamos as duas regras usa-das na TPG [3]. . . 22 1.10 Extrapola¸c˜ao para tamanho infinito (L→ ∞). . . 25 1.11 Comportamento no RTC com amostra saturada (fronteira congelada-ativa), e
com 50% dos s´ıtios modificados (fronteira ca´otica-n˜ao-ca´otica). . . 26 1.12 Comportamento no RTC quando iniciamos o sistema com apenas um s´ıtio ativo
(fronteira congelada-ativa), e com o dano unit´ario (fronteira ca´otica-n˜ao-ca´otica). 27 1.13 Taxas de transi¸c˜ao para o caso unidimensional do PC [4]. . . 29 1.14 Extrapola¸c˜ao para tamanho infinito (L→ ∞). . . 32 1.15 Extrapola¸c˜ao para tamanho infinito (L → ∞) para tim = 2 (gr´afico maior), e
tim= 5 (gr´afico menor). . . 33
1.16 Comportamento de pC versus tim. . . 34
1.17 Comportamento no RTC de ρdo PC tradicional (tim= 0 (quadrado)) e
tempo-rizado (tim= 5 (c´ırculo)), quando iniciamos o sistema saturado. . . 35
1.18 Comportamento no RTC de ρdo PC tradicional (tim= 0 (quadrado)) e
tempo-rizado (tim= 3 (c´ırculo)), quando iniciamos a amostra com um s´ıtio ativo. . . . 35
2.1 Exemplo de uma configura¸c˜ao t´ıpica que acontece no modelo II. As part´ıculas em azul ou branco pertencem ao s´ıtio, e em vermelho indica uma configura¸c˜ao
n˜ao permitida devido a restri¸c˜ao do modelo, logo o excesso ´e devolvido ao s´ıtio
de origem. a) e b) Difus˜ao total. c) a e) Difus˜ao parcial. f) N˜ao ocorre difus˜ao. . 43 2.2 Comportamento do deslocamento quadr´atico m´edio versus tempo no modelo I,
para (da esquerda para direita) p = 1,94894; 0,95568; e 0,94898. Temos dois
comportamentos distintos, no in´ıcio, subdifusivo (linha tracejada), e no regime
estacion´ario, linear (linha cont´ınua). . . 45 2.3 < (∆xj)2 > versus t no modelo II para (da esquerda para direita) p =
0,95568; 0,94898; e 1,94898. Novamente, temos dois comportamentos
distin-tos, subdifusivo (linha tracejada), e linear (linha cont´ınua). . . 45 2.4 Comportamento de De ρ versus t. O regime estacion´ario compreende a regi˜ao
2.5 Constante de difus˜ao D no regime estacion´ario versus ∆ = p−pc no modelo I
para os tamanho indicados. . . 47 2.6 D no regime estacion´ario versus ∆ no modelo II. . . 47 2.7 Fra¸c˜ao de s´ıtios ativos ρ no regime estacion´ario versus ∆ no modelo I para os
tamanhos indicados. . . 48 2.8 ρ no regime estacion´ario versus ∆ no modelo II. . . 48 2.9 ρ (s´ımbolos abertos) e D (s´ımbolos cheios) versus ∆ nos modelos I (quadrados)
e II (circulos), para L= 50 000. . . 49 2.10 Constante de difus˜ao modificada D∗=Lβ/ν⊥Dversus distˆancia do ponto cr´ıtico
modificada ∆∗ =L1/ν⊥∆ para o modelo I para os tamanhos indicados. . . . 50 2.11 D∗ versus ∆∗ para o modelo II. . . 50 2.12 Fra¸c˜ao de s´ıtios ativos modificadoρ∗ =Lβ/ν⊥ρ versus distˆancia do ponto cr´ıtico
modificada ∆∗ =L1/ν⊥∆ no modelo I para os tamanhos indicados. . . . 51 2.13 ρ∗ versus ∆∗ para o modelo II. . . . 51
2.14 Deslocamento quadr´atico m´edio h[∆x]2i versus t para diferentes configura¸c˜oes iniciais. Distribuindo as part´ıculas aleatoriamente (linha cont´ınua), obtemos um
comportamento subdifusivo, e com um s´ıtio ativo (linha tracejada), um
compor-tamento superdifusivo. . . 53 2.15 Decaimento inicial da Fra¸c˜ao de s´ıtios ativos (quadrado) e da constante de difus˜ao
(c´ırculo) no ponto cr´ıtico para o modelo II quando distribu´ımos as part´ıculas
aleatoriamente para L= 50 000. . . 54 2.16 Crescimento inicial da fra¸c˜ao de s´ıtios ativos (quadrados) e da constante de
difus˜ao (c´ırculos) no ponto cr´ıtico para o modelo II quando iniciamos com um
s´ıtio ativo para L= 50 000. . . 55 3.1 Parte da Bacia do Rio S˜ao Francisco na regi˜ao Nordeste do Brasil. Este rio separa
parte do estado de Pernambuco (PE) e Bahia (BA), e os estados de Sergipe (SE)
3.3 Relevo artificial criado no software Surfer a partir dos dados percola¸c˜ao Ge-ogr´afica em 3-D. As cores representam diferentes alturas em rela¸c˜ao a uma altura
de referˆencia. . . 60 3.4 Redes bidimensionais com diferentes valores de probabilidade de preenchimento.
No limite de L → ∞, a percola¸c˜ao sempre existir´a com probabilidade 1 para p > pc. . . 61
3.5 Evolu¸c˜ao da Percola¸c˜ao Geogr´afica, onde a cor vermelha corresponde aos s´ıtios percolantes. . . 63 3.6 Estrutura final formada na Percola¸c˜ao Geogr´afica. . . 63 3.7 Exemplo de uma cordlheira artificial formada a da partir Percola¸c˜ao Geogr´afica. 64 3.8 Estrutura final da Percola¸c˜ao Geogr´afica Isotr´opica por s´ıtios. Neste caso o
sistema pode percolar nas duas dire¸c˜oes, e no final divide a regi˜ao em quatro
partes. . . 64 3.9 Fotografia de um relevo real. . . 65 3.10 Forma¸c˜ao dos aglomerados usando o algoritmo de Hoshen-Kopelman. . . 67 3.11 Ilustra¸c˜ao da adi¸c˜ao do s´ıtio ”?” na rede que far´a a liga¸c˜ao de v´arios r´otulos
diferentes. Neste caso, o novo s´ıtio e a vizinhan¸ca ficar˜ao com o r´otulo de menor
valor. . . 68 3.12 A massa M das linhas divis´orias. A massa se comporta de acordo com a rela¸c˜ao
3.1. O gr´afico menor mostra o resultado quando usamos o m´etodo das caixas. . 70 3.13 Comportamento da rugosidade w versus L na escala logar´ıtmica. A inclina¸c˜ao
nos fornece o expoente de rugosidade que neste caso ´e igual a 1,0 com erro na
segunda casa decimal. . . 71 3.14 Massa da superf´ıcieM versus L na escala logar´ıtmica. A massa se comporta de
acordo com a rela¸c˜ao 3.1.. . . 72 3.15 C´alculo da dimens˜ao fractal usando o m´etodo das caixas para as linhas divis´orias
Lista de Tabelas
1.1 Tabela de probabilidades de transi¸c˜ao para o ACDK. . . 14
1.2 Tabela dos valores de p1C obtidos com o MBA. . . 20
1.3 Tabela dos valores de p2C obtidos com o MBA. . . 25
1.4 Tabela com os expoentes cr´ıticos obtidos com o RTC. . . 28
1.5 Tabela com os expoentes cr´ıticos, para ambas as fronteiras, obtidos com o RTC e o MBA. . . 28
1.6 Tabela com os valores de pC para diferentes tempos de imuniza¸c˜ao (tim). . . 33
Introdu¸
c˜
ao
no comportamento dos terremotos que comentamos anteriomente. A ausˆencia de escala tamb´em ´e observada em sistemas que permanecem em equil´ıbrio metaest´avel, por exem-plo, j´a vimos em filmes, desenhos, etc em que os alpinistas n˜ao podem gritar para que as avalanches n˜ao ocorram, ou seja, a perturba¸c˜ao (grito, um pequeno floco de neve) faz com que o sistema alcance a estabilidade atrav´es destas avalanches que n˜ao sabemos o seu tamanho. Outro exemplo ´e o rel´ogio de areia no qual o fluxo de areia ´e constante, e devido ao empilhamento tamb´em surgem avalanches de v´arios tamanhos. Este empilhamento ´e a id´eia do modelo da pilha de areia como podemos ver na figura 1. A medida que acontece as avalanches, a inclina¸c˜ao da pilha varia de um valor m´ınimo (estado subcr´ıtico) onde acontecem os de pequena intensidade, a um valor m´aximo (supercr´ıtico), os de grandes intensidade. J´a o estado cr´ıtico (intermedi´ario) ´e caracterizado por avalanches de todos os tamanhos.
Figura 1: Modelo da pilha de areia no qual surgem avalanches de v´arios tamanhos devido a ausˆencia de escala.
mo-rat´oria, calote, etc de uma ou v´arias empresas. Observamos isso no ´ultimo semestre do ano de 2008, com a crise nos Estados Unidos no qual muitas empresas no mundo perde-ram seu valor de mercado. Tamb´em temos instabilidades no corpo humano, por exemplo, um pequeno est´ımulo pode causar um infarto, como tamb´em um choque, ou reanima¸c˜ao card´ıaca, pode ocasionar uma arritmia card´ıaca em uma pessoa s˜a, ou devolver os bati-mentos em sua normalidade.
Alguns dos sistemas que citamos anteriormente v˜ao para o estado cr´ıtico atrav´es de um agente que provoca mudan¸cas, ou seja, uma dinˆamica. No caso dos terremotos, a dinˆamica ´e o movimento das placas tectˆonicas, nas montanhas, as avalanches ocorrem devido a deposi¸c˜ao natural da neve, no rel´ogio de areia, o empilhamento dos gr˜aos de areia, na bolsa de valores, a especula¸c˜ao financeira. Os sistemas se dirigem para a regi˜ao de criticalidade, que ´e uma bacia atratora, devido a modifica¸c˜ao de algum parˆametro. Esta propriedade que os sistemas possuem ´e chamada de Criticalidade Auto-Organizada (Self-Organizated Criticality) que foi descoberta e proposta por Bak,Thang e Wiesenfeld [7, 8]. Um dos objetivos desta teoria ´e estudar alguns problemas da natureza fora do equil´ıbrio (sistemas n˜ao conservativos que dissipam energia como forma de buscar a criticalidade), que est˜ao sempre relaxando e apresentam alguma irregularidade no decorrer do tempo. A invariˆancia de escala em sistemas naturais n˜ao ´e explicada simplesmente mostrando o comportamento dos elementos do sistema, e a Criticalidade Auto-Organizada (CAC) fornece argumentos para esta invariˆancia de escala.
onde H(s) ´e o Hamiltoniano microsc´opico [1, 9]. Em princ´ıpio, este ensemble fornece o c´alculo do valor esperado de um observ´avel independente do tempo dado pela soma sobre todos os estados poss´ıveis do sistema, que em muitos casos ´e muito dif´ıcil represent´a-lo. De fato, embora numerosas solu¸c˜oes exatas sejam encontradas [1, 10], a grande maioria dos sistemas estoc´asticos ainda n˜ao podem ser resolvidos exatamente. Para investigar tais sistemas, s˜ao usadas t´ecnicas aproximativas tais como expans˜ao em s´eries [11] e grupo de renormaliza¸c˜ao [12]. Na ME de equil´ıbrio temos ferramentas te´oricas bem desenvolvidas. Do ponto de vista f´ısico ´e interessante investigar sistemas estoc´asticos em que os graus de liberdade microsc´opicos se comportem coletivamente em grandes escalas [13, 14], que ´e observado quando o sistema sofre uma transi¸c˜ao de fase, por exemplo, quando o modelo de Ising bidimensional sofre uma transi¸c˜ao de fase, observa-se o tamanho m´edio dos dom´ınios que diverge quando a temperatura cr´ıtica ´e alcan¸cada [15].
Outra caracter´ıstica importante nos SC ´e que na maioria dos casos a evolu¸c˜ao tem-poral inicia de um estado inicial que ´e muito longe do equil´ıbrio. Desta forma, o tempo de relaxa¸c˜ao at´e o estado estacion´ario depende das propriedades dinˆamicas espec´ıficas de cada sistema. Quando observamos a evolu¸c˜ao temporal a partir da segunda lei da Termodinˆamica, que governa o comportamento de todos os sistemas, implicitamente diz que esta evolu¸c˜ao parte de uma configura¸c˜ao para outra de m´axima entropia. Quando inclu´ımos a vizinhan¸ca, alguns sistemas apresentam um comportamento espontˆaneo to-talmente oposto, ao custo do aumento da entropia da vizinhan¸ca. A partir de uma configura¸c˜ao inicial, o sistema atinge uma configura¸c˜ao bastante complexa [16].
Como foi comentado anteriormente, podemos trocar a descri¸c˜ao determin´ıstica por uma estoc´astica, ou seja, o grau de liberdade segue uma probabilidade Pt(s) que ´e
de coexistˆencia de oito fluidos distintos (Ne, Ar, Kr, Xe,N2, O2, CO e CH4) se ajustam
a uma s´o curva se o expoente β associado ao parˆametro de ordem dos fluidos for 1/3. A partir deste momento, o conceito de classe de universalidade ´e bastante usado quando se estuda fenˆomenos cr´ıticos de sistemas f´ısicos, que s˜ao totalmente descorrelacionados, e se comportam da mesma forma perto da transi¸c˜ao de fase caracterizado pelos mesmos expoentes cr´ıticos. O n´umero de classes de universalidade parece ser limitado e deve ser uma importante tarefa classific´a-las, similar aos elementos da tabela peri´odica.
Uma das classes de universalidade mais famosa na ME ´e a percola¸c˜ao direcionada (PD) que engloba v´arios sistemas que tˆem em comum uma transi¸c˜ao de fase cont´ınua de uma fase ativa para um ´unico estado absorvente, seguindo uma dinˆamica local bem definida com intera¸c˜ao de curto alcance [1, 4, 18, 19]. Neste ano surgiu a primeira evidˆencia experimental do PD [20, 21] em cristais l´ıquidos [22, 23]. Neste trabalho, os autores discutem detalhadamente os experimentos e as an´alises feitas que mostram claramente os expoentes cr´ıticos da PD, como tamb´em as suas rela¸c˜oes de escala. No cap´ıtulo 1 desta tese estudaremos dois sistemas distintos, cujos expoentes criticos pertencem, em sua maioria, a classe de unviversalidade da PD, o autˆomato celular de Domany-Kinzel (ACDK) e o Processo de Contato (PC). Para caracterizar a criticalidade destes sistemas (ponto e expoente cr´ıticos) usamos o m´etodo de busca autom´atica (MBA), e o regime de tempo curto (RTC). O MBA ´e inspirado na CAC no qual uma equa¸c˜ao de recorrˆencia leva o sistema para a regi˜ao do ponto cr´ıtico e foi aplicado inicialmente em pol´ımeros ramificados [24]. J´a o RTC, usa a evolu¸c˜ao temporal do parˆametro de ordem no ponto cr´ıtico, bem antes do equil´ıbrio estacion´ario, para obter rela¸c˜oes de expoentes cr´ıticos, com a vantagem de usar pouco tempo computacional, e apresentar pequenos valores de comprimento de correla¸c˜ao espacial e temporal, levando a uma substancial redu¸c˜ao de efeitos de tamanho finito.
cr´ıticos atrav´es de colapso de dados em dois modelos diferentes de pilhas de areia. Al´em da criticalidade, estudamos o RTC, usando D e ρ, e o deslocamento quadr´atico m´edio (< ∆x2 >). Neste ´ultimo, conseguimos mostrar que antes de ρ entrar no regime
esta-cion´ario, a difus˜ao das part´ıculas ´e anˆomala e fortemente dependente da configura¸c˜ao inicial, e no regime estacion´ario, o deslocamento quadr´atico ´e proporcional ao tempo.
Cap´ıtulo 1
Autˆ
omato Celular de
Domany-Kinzel, e Processo de
Contato
1.1
Introdu¸
c˜
ao
fator fundamental e representa uma importante fun¸c˜ao, sendo considerado uma dimens˜ao adicional, como comentamos no cap´ıtulo anterior. Assim, o tempo e o espa¸co apresentam caracter´ısticas e propriedades distintas, de tal forma que se associa os ´ındices k e ⊥, respectivamente. A transi¸c˜ao de fase ´e caracterizada por dois comprimentos de correla¸c˜ao independentes, chamados de comprimento de correla¸c˜ao temporal ξk, e comprimento de
correla¸c˜ao espacial ξ⊥. Estes comprimentos divergem na criticalidade, com diferentes
expoentes, νk e ν⊥, como indicamos nas equa¸c˜oes 1.1 e 1.2.
ξk ∼ |p−pc|−νk (1.1)
ξ⊥ ∼ |p−pc|−ν⊥ (1.2)
Geralmente os expoentesν⊥ e νk s˜ao diferentes, e no regime de escala os dois
compri-mentos s˜ao relacionados como:
ξk ∼ξ⊥z, (1.3)
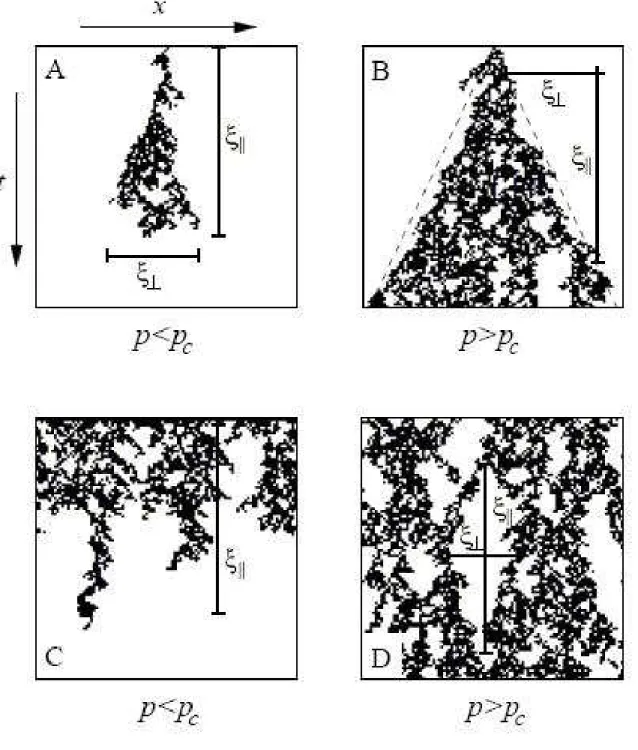
onde z ´e o expoente dinˆamico, cujo valor ´ez=νk/ν⊥. Na figura 1.1 ilustramos o significado
f´ısico dos comprimentos de correla¸c˜ao ξk e ξ⊥, no qual apresentamos o comportamento
no regime subcr´ıtico e supercr´ıtico. Quando iniciamos o sistema com apenas um s´ıtio ativo, na fase inativa, os aglomerados formados tem a forma de uma gota (figura A), e os tamanhos m´edios do tamanho lateral e do tempo de vida s˜ao proporcionais a ξ⊥ e
ξk, respectivamente. Ap´os a criticalidade os aglomerados crescem em forma de um cone
(figura B), e o ˆangulo de abertura ´e determinado pela raz˜aoξ⊥/ξk. Se iniciarmos o sistema
totalmente com a rede totalmente ocupada, na fase inativa o comprimento de correla¸c˜ao ξk representa o tempo de decaimento (figura C), enquanto no estado estacion´ario, os
Figura 1.1: Interpreta¸c˜ao dos comprimentos de correla¸c˜ao ν⊥ e νk nas regi˜oes subcr´ıtica
(es-querda) e supercr´ıtica (direita). Nas figuras A e B mostramos como o aglomerado cresce a partir
de um s´ıtio ativo. Na figura C e D, mostramos como o aglomerado cresce quando a rede est´a
totalmente ocupada. As escalas indicadas paraξk e ξ⊥devem ser interpretadas como m´edia de
Os modelos b´asicos da ME de n˜ao-equil´ıbrio s˜ao o Autˆomato Celular de Domany-Kinzel (ACDK), considerado uma extens˜ao da percola¸c˜ao direcionada [32, 33], e o Pro-cesso de Contato (PC) [34]. Estudaremos ambos os modelos neste cap´ıtulo. Estes modelos possuem regras locais, que envolvem os seus primeiros vizinhos, cont´em elementos b´asicos de irreversibilidade, e exibem transi¸c˜ao de fase em 1-D (neste caso consideraremos so-mente a dimens˜ao espacial)[1, 4, 35]. Nas duas pr´oximas se¸c˜oes comentaremos sobre os dois m´etodos que usaremos para caracterizar a transi¸c˜ao de fase, o M´etodo de Busca Au-tom´atica (MBA), e o regime de tempos curtos (RTC). E nas se¸c˜oes seguintes aplicaremos estes m´etodos no ACDK, no PC com a inclus˜ao do tempo de imuniza¸c˜ao, conforme foi mostrado por da Silva Jr [36].
1.2
M´
etodo de Busca Autom´
atica
Comentamos no cap´ıtulo anterior que o trabalho de Per Bak et al [7, 8] trouxe um novo conceito para a ME que foi a CAC, no qual os sistemas dinˆamicos se dirigem espontaneamente para a regi˜ao cr´ıtica (bacia atratora). Um conceito para este fenˆomeno foi proposto por Sornette et al [37] baseado na id´eia de que uma fun¸c˜ao de controle leva o sistema para a vizinhan¸ca do ponto cr´ıtico. Inspirado neste conceito, surge o MBA que usa uma equa¸c˜ao de recorrˆencia com o prop´osito de levar o sistema para a criticalidade, ou seja, esta equa¸c˜ao ´e uma fun¸c˜ao de controle. Pensando na pilha de areia, ´e como adicionar gr˜aos at´e ocorrer as avalanches, sempre observando a quantidade de gr˜aos que a levou `a regi˜ao cr´ıtica. Escolhendo o parˆametro de ordem apropriado, a recorrˆencia faz com que o sistema encontre a criticalidade. A equa¸c˜ao de recorrˆencia do MBA, equa¸c˜ao 1.4, envolve duas vari´aveis (X(t), Y(t)) associadas aos parˆametros f´ısicos do sistema.
X(t+ 1) =X(t)−α(Y(t)−Y∗) (1.4) Estas vari´aveis mudam a cada passote convergir´a para um valor estacion´arioX∗ ap´os
um certo n´umero de passos, compat´ıvel com o valor estacion´arioY∗, valor muito pequeno,
Figura 1.2: Evolu¸c˜ao temporal do M´etodo de Busca Autom´atico. a) Na regi˜ao cr´ıtica o sistema fica oscilando em torno de um valor m´edio. b)Amplia¸c˜ao (zoom) da parte tracejada.
O valor estacion´ario de X∗ depende da escolha do valor deY∗, e tamb´em da escolha
de X(0), que ir´a fornecer Y(0), compat´ıvel com o intervalo definido no sistema. Assim os parˆametros a ser investigados [(X(t), Y(t)) variam de (X(0), Y(0)) at´e o valores esta-cion´arios (X∗, Y∗). A raz˜ao de convergˆencia ´e controlada pela var´avel α, ou seja, esta
vari´avel controla a forma como o sistema alcan¸ca a criticalidade. Se α for grande, o sistema convergir´a rapidamente para a regi˜ao cr´ıtica, por´em fornecer´a um valor de X∗
com um desvio muito grande. Se α for pequeno, convergir´a lentamente, ou seja, demo-rar´a mais passos computacionais para chegar na criticalidade, por´em com a vantagem de obter X∗ com desvio muito pequeno. Com estes requisitos ´e interessante que o valor de
para a determina¸c˜ao da temperatura cr´ıtica, ondeX ≡K =J/(kBT) (proporcional ao
in-verso da temperatura) eY ≡m(magnetiza¸c˜ao por spinm=N−1P
ihSii). No PC [44], a
probabilidade cr´ıtica de recupera¸c˜ao, no qualX ≡λ (taxa de infec¸c˜ao) eY ≡N (n´umero de infectados naquele passo) e no ACDK [45, 46] na determina¸c˜ao da fonteira cr´ıtica nas duas fronteiras, como iremos comentar adiante. Nas pr´oximas se¸c˜oes aplicaremos o MBA no ACDK e no PC tradicional e temporizado.
1.3
Regime de Tempo Curto
As t´ecnicas tradicionais para a obten¸c˜ao dos expoentes cr´ıticos necessitam de um tempo de relaxa¸c˜ao muito grande, principalmente pr´oximo do ponto cr´ıtico. Isto era necess´ario, pois se pensava que o comportamento universal s´o era alcan¸cado no regime estacion´ario, pois as correla¸c˜oes pr´oximas da regi˜ao de ponto cr´ıtico s˜ao muito intensas, ficando dif´ıcil obter configura¸c˜oes n˜ao correlacionadas [47]. Tentando contornar este problema Huse [48] e Janssen et al [49] descobriram que o comportamento universal acontece muito antes de atingir o equil´ıbrio. Neste caso, o tempo funciona como comprimento, se observarmos do ponto de vista da teoria de escala para sistemas finitos. Assim surgiu o RTC, uma importante ferramenta na investiga¸c˜ao de fenˆomenos cr´ıticos [50], com a vantagem do pouco tempo computacional envolvido quando conhecemos o ponto cr´ıtico, e pequenos valores de comprimento de correla¸c˜ao espacial e temporal, levando a uma substancial redu¸c˜ao de efeitos de tamanho finito. O RTC trata do comportamento dos k-´esimos momentos antes do equil´ıbrio, dependente das condi¸c˜oes iniciais. Estas rela¸c˜oes foram verficados numericamente na literatura por [50, 51, 52, 53, 54]. Por exemplo, para o modelo de Ising, descrito em termos de vari´aveis bin´arias,Si(t) = ±1, ok-´esimo momento
da magnetiza¸c˜ao no tempo ´e:
M(k)(t) = 1 Nkh
N
X
i=1
Si(t)
!k
i (1.5)
Se a magnetiza¸c˜ao inicial ´e pequena, M(0) ≪ 1, a magnetiza¸c˜ao, ou seja, o primeiro momento (M(1)(t)≡M(t) se comporta:
M(t)∼M(0)tθ (1.6)
O expoente θ relaciona o crescimento da magnetiza¸c˜ao com o tempo na temperatura cr´ıtica. Para calcularθ da equa¸c˜ao 1.6, devemos considerar diferentes e pequenos valores (embora finitos) valores de M(0), e ent˜ao extrapolamos o valor de M(0)→ 0. Agora, se iniciarmos o sistema com a configura¸c˜ao completamente ordenada [M(0) = 1], a magne-tiza¸c˜ao segue a lei de potˆencia,
M(t)∼t−β/(νz) (1.7)
onde β, ν (que corresponde ν⊥ nos sistemas da ME n˜ao-equil´ıbrio), e z ´e o expoente
1.4
Autˆ
omato Celular de Domany-Kinzel
Comentamos anteriormente que o ACDK ´e um dos modelos b´asicos da ME de N˜ao-Equil´ıbrio [35]. Neste modelo, em uma rede de tamanho L, seus s´ıtios podem assumir dois estados, ηi = 0 (falso, vazio) ou ηi = 1 (verdadeiro, cheio), onde i=1, 2, 3,..., L. As
probabilidades de transi¸c˜ao deste sistema possuem regras locais, ou seja, depende dos seus primeiros vizinhos. Temos dois esquemas de atualiza¸c˜ao, o sim´etrico cuja probabilidade de transi¸c˜ao depende do estado dos seus primeiros vizinhos, P(ηi−1(t), ηi+1(t)|ηi(t+ 1)),
e o n˜ao-sim´etrico, cuja probabilidade depende do estado do s´ıtio em quest˜ao e de um dos seus vizinhos, P(ηi−1(t), ηi(t)|ηi(t+ 1)) ou P(ηi(t), ηi+1(t)|ηi(t+ 1)). Neste trabalho
usaremos, por raz˜oes computacionais, o esquema n˜ao sim´etrico [55, 56, 57]. Outro fato interessante ´e que a probabilidade ´e sim´etrica, como indicamos na equa¸c˜ao 1.8:
P(0,1|1) =P(1,0|1) =p1 (1.8)
Quando temos dois s´ıtios diferentes, a probabilidade de transi¸c˜ao usada ´e p1, e dois
s´ıtios com estados η= 1, a probabilidade usada ´ep2. O ACDK possui uma configura¸c˜ao
absorvente, ou seja, se na atualiza¸c˜ao de um s´ıtio temos dois s´ıtios com estadosη= 0 na regra de transi¸c˜ao, o s´ıtio fica com estado nulo. Na tabela 1.1 apresentamos as regras de transi¸c˜ao pra o ACDK.
ηi,t|(ηi,t−1ηi+1,t−1) (1,1) (0,1) ou (1,0) (0,0)
1 p2 p1 0
0 1−p2 1−p1 1
Tabela 1.1: Tabela de probabilidades de transi¸c˜ao para o ACDK.
Para encontrar a transi¸c˜ao de fases do ACDK, temos que encontrar quais probabili-dades cr´ıticas (valores de p1 e p2) que faz o sistema mudar de fase. Na literatura temos
Figura 1.3: Diagrama de Fases para o ACDK, mostrando os resultados obtidos por aproxima¸c˜ao por s´ıtio e por par, e os dados obtidos por simula¸c˜ao computacional [2].
Quando simulamos o ACDK, escolhemos uma configura¸c˜ao inicial, por exemplo, 50% de chances para cada estado, e a partir desta configura¸c˜ao, o sistema evolui de acordo com uma dinˆamica s´ıncrona e tempo discreto, ou seja, todos os s´ıtios s˜ao visitados a cada ∆t = 1. Usando as regras de transi¸c˜ao da tabela 1.1 e o parˆametro de ordem,ρ, chamada de densidade de s´ıtios ativos, magnetiza¸c˜ao ou atividade, expressa atrav´es da equa¸c˜ao 1.9, caracterizamos as duas fases no ACDK que ´e fun¸c˜ao dos valores de p1,p2 e do tempo de
relaxa¸c˜ao, conforme previsto no trabalho de Domany e Kinzel [32, 58].
ρ= 1 L
L
X
i=1
ηi, (1.9)
Figura 1.4: Diagrama de fases para o ACDK. Neste diagrama podemos ver as duas fases, a congelada e a ativa. Neste diagrama destacamos alguns pontos conhecidos na literatura.
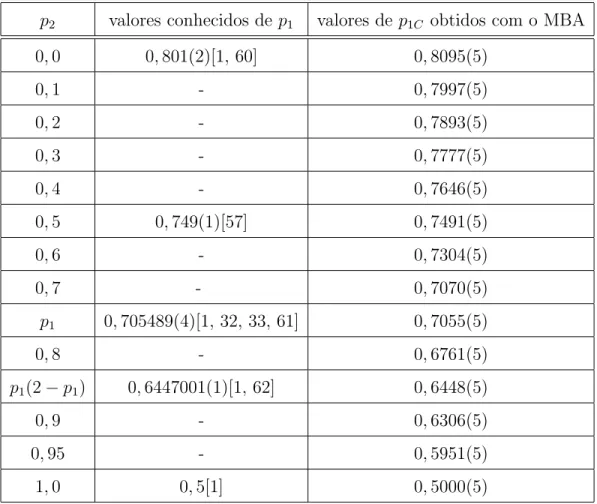
No diagrama 1.4, destacamos cinco pontos cr´ıticos que s˜ao conhecidos na literatura ao longo de sua linha cr´ıtica. O primeiro,p2 = 0 ep1 = 0,801(2), corresponde a concentra¸c˜ao
inicial no autˆomato celular da regra 18 de Wolfram [1, 60], o segundo p2 = 0,5 e p1 =
0,749(1) [57], o terceiro, p1 = p2 = 0,705489(4), a percola¸c˜ao direcionada por s´ıtio
[1, 32, 33, 61], o quarto, p1 = 0,6447001(1) e p2 = p1(2−p1), a percola¸c˜ao direcionada
por liga¸c˜ao [1, 62], e o quinto,p1 = 0,5 ep2 = 1,0, a percola¸c˜ao direcionada compacta [1].
Usaremos estes pontos para comparar com os pontos cr´ıticos que iremos obter usando o MBA.
Na segunda se¸c˜ao deste cap´ıtulo, comentamos como o MBA funciona e para determi-nar a fronteira cr´ıtica congelada-ativa do ACDK, usaremos uma equa¸c˜ao de recorrˆencia, idˆentica a 1.4, usando o parˆametro de ordemρ e escolhendo p2 fixo para procurar p1, ou
podemos ver na equa¸c˜ao 1.10.
p1(L, t+ 1) =p1(L, t)−b[ρ(t)−(1/L)] (1.10)
onde a constanteb´e um pequeno valor positivo que controla a raz˜ao de convergˆencia para a fronteira cr´ıtica. Quando a fronteira cr´ıtica ´e alcan¸cada, flutua¸c˜oes da ordem O(1/L) ocorrem em torno do ponto cr´ıtico procurado. Para cada passo t, temos um valor dife-rente dep1, e tamb´em uma configura¸c˜ao inicial diferente correspondente `a 50% de chances
para cada estado. Deixamos o sistema relaxar at´e um certo tempo de relaxa¸c˜ao trel, e
medimos o valor do parˆametro de ordem, e usamos a equa¸c˜ao de recorrˆencia 1.10, para obter o novo valor de p1. Depois de aplicar a equa¸c˜ao de recorrˆencia, dependendo do
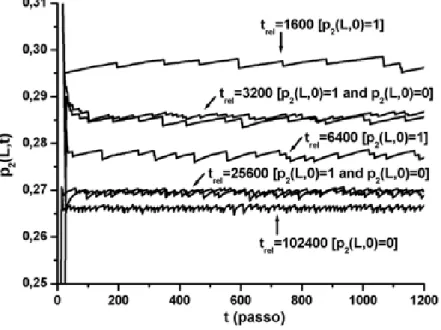
valor de b da equa¸c˜ao 1.10, podemos obter uma convergˆencia depois de t = 100 passos, ou seja, este m´etodo fornece valores estacion´arios exigindo um tempo computacional re-lativamente pequeno. Outro fato interessante ´e que o MBA se dirige para o ponto cr´ıtico independentemente do valor inicial, como podemos ver na figura 1.5. Para isso, basta que o o valor inicial esteja dentro do dom´ınio da vari´avel, que no caso da fonteira cr´ıtica 0 ≤ p1 ≤ 1. Os nossos dados confirmam que os valores estacion´arios obtidos com MBA
s˜ao fortemente dependentes do trel, fato que tamb´em podemos ver nas figuras 1.5 e 1.6.
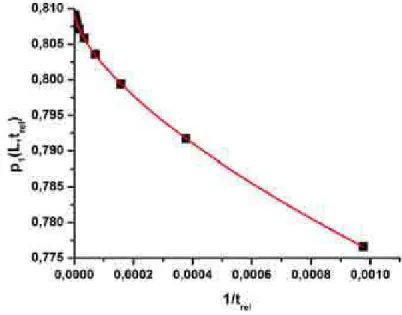
Para obter os resultados no limite Termodinˆamico, precisamos fazer inicialmente extra-pola¸c˜oes para um tempo infinito de relaxa¸c˜ao, ou seja,trel→ ∞. Para essa extrapola¸c˜ao
usamos um ajuste n˜ao-linear usando a equa¸c˜ao 1.11 para umL fixo.
p1(L, trel)−p¯1(L, trel → ∞)∼t−relα (1.11)
ondeα´e o expoente de ajuste, p1(L, trel) ´e o valor m´edio dos valores obtidos com o MBA
na regi˜ao estacion´aria, ¯p1(L, trel → ∞) ´e o valor extrapolado quando trel → ∞. Daqui
por diante usaremos a nota¸c˜ao ¯p1(L, trel→ ∞)≡p¯1(L). Para obter ¯p1(L), usamos v´arios
tempos de relaxa¸c˜ao, num total de 11 pontos, na extrapola¸c˜ao, e para cada um destes pontos temos 3 amostras que foram combinadas de 177147 maneiras diferentes. Para esses ajustes, usamos no programa o pacote cminpak, dispon´ıvel na internet. A vantagem de usar este pacote ´e a rapidez com que obtemos as vari´aveis de ajustes, e assim a m´edia e o desvio padr˜ao delas. Na figura 1.6 mostramos um desses gr´aficos que foram extrapolados.
Figura 1.6: Extrapola¸c˜ao no tempo de relaxa¸c˜aotrel. O resultado que obtemos ´e o valor dep1
Os tempos de relaxa¸c˜ao usados variaram de trel = 1024 `a trel = 1048576, e no regime
estacion´ario do MBA (a partir de 150 passos) usamos os 2150 passos seguintes para o menor tempo de relaxa¸c˜ao, e 150 passos, para o maior tempo de relaxa¸c˜ao. Depois que obtemos os valores de ¯p1(L) para cada L, fazemos outra extrapola¸c˜ao para obter o limite
termodinˆamico para L → ∞, usando novamente uma extrapola¸c˜ao n˜ao-linear, equa¸c˜ao 1.12 para obter p1C que ´e o ponto cr´ıtico que procuramos.
¯
p1(L)−p1C ∼L−1/ν⊥ (1.12)
Simulamos tamanhos que variam de L = 128 `a L = 16384, sendo que para o ajuste, usamos L = 2048, L = 4096, L = 8192 e L = 16384. Na figura 1.7 mostramos a extrapola¸c˜ao usando para L→ ∞parap2 = 0,0 ep2 = 0,5. O expoente da extrapola¸c˜ao
para ambos ´e 1/ν⊥ = 0,91(5), compat´ıvel com o valor da literatura.
Figura 1.7: Extrapola¸c˜ao para tamanho infinito (L → ∞) para p2 = 0,0 (figura maior), e
p2 = 0,5 (figura menor).
absorvente. Mesmo utilizando tempos de relaxa¸c˜ao menores e menos pontos(6 pontos) na extrapola¸c˜ao no tempo de relaxa¸c˜ao, tamb´em obtemos resultados bem pr´oximos, o que mostra uma boa efic´acia do MBA.
p2 valores conhecidos de p1 valores de p1C obtidos com o MBA
0,0 0,801(2)[1, 60] 0,8095(5)
0,1 - 0,7997(5)
0,2 - 0,7893(5)
0,3 - 0,7777(5)
0,4 - 0,7646(5)
0,5 0,749(1)[57] 0,7491(5)
0,6 - 0,7304(5)
0,7 - 0,7070(5)
p1 0,705489(4)[1, 32, 33, 61] 0,7055(5)
0,8 - 0,6761(5)
p1(2−p1) 0,6447001(1)[1, 62] 0,6448(5)
0,9 - 0,6306(5)
0,95 - 0,5951(5)
1,0 0,5[1] 0,5000(5)
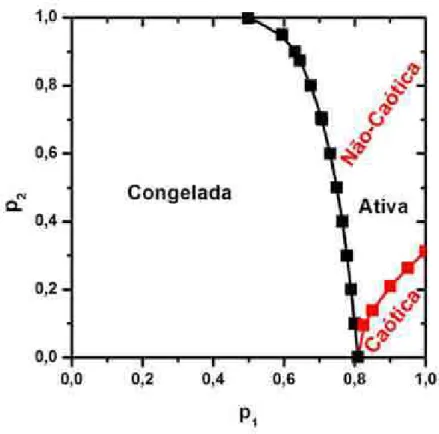
Usando o parˆametro de ordem ρ obtemos duas fases, uma ativa e outra n˜ao ativa (congelada). Usando a t´ecnica de propaga¸c˜ao de danos (TPG), conseguimos obter duas novas fases dentro da fase ativa, uma com propaga¸c˜ao de dano e outra sem, como podemos ver na figura 1.8, e conforme previsto inicialmente por Martins et al [55].
Figura 1.8: Diagrama de Fases para o ACDK. Nela podemos ver as trˆes fases, uma congelada, e as ativas com e sem propaga¸c˜ao de dano.
A TPG foi desenvolvida por Kauffman [63] no contexto dos autˆomatos celulares, sendo posteriormente aplicada em sistemas constitu´ıdos de sub-unidades interagentes [64, 65]. Esta t´ecnica ´e bastante aplicada na ME com o objetivo de investigar as propriedades dinˆamicas de um sistema. Ferramenta usada para estabelecer conex˜oes entre aspectos dinˆamicos e propriedades est´aticas termodinˆamicas, que consiste em observar duas amos-tras que diferem apenas por alguns s´ıtios, ou seja, em um sistema cooperativoAdescrito por vari´aveis discretasηi(t), ondei= 1,2,3, ..., L, o dano corresponde a invers˜ao de alguns
ηBi (t) = 1−ηiA(t), (1.13) onde o sistema B ´e a c´opia modificada. Uma das regras de evolu¸c˜ao dinˆamica, usa a mesma regra de transi¸c˜ao e sequˆencia de n´umero aleat´orios para o sistema A e sistema B (regra 1). Outras regras foram desenvolvidas, sorteando um n´umero aleat´orio para o sistema A e outro para diferente para o B (regra 2) [66, 3]. Comparando as duas regras notamos que existe uma diferen¸ca nos pontos cr´ıticos, como podemos ver na figura 1.9. Estas diferen¸cas foram descobertas por Bagnoli [67], que estudou a propaga¸c˜ao de danos no ACDK usando a teoria de campo m´edio. Nesta tese usaremos a regra ”1”, ou seja, a que usa a mesma sequencia de numeros aleat´orios para os dois sistemas A e B.
Figura 1.9: Diagrama de Fases da ACDK. Neste diagrama evidˆenciamos as duas regras usadas na TPG [3].
A poss´ıvel diferen¸ca existente depois de um certo tempo de relaxa¸c˜ao, ´e denominado de dano que ´e medido atrav´es de uma vari´avel denominada distˆancia de Hamming [68], que ´e a fra¸c˜ao total de s´ıtios que diferem entre os dois sistemas. Matematicamente a distˆancia de Hamming ´e definida como:
Ψ(t) = 1 L
N
X
i=1
|ηiA−ηiB|, (1.14)
Enumerando os passos da TPG, temos:
1. Escolhe-se a configura¸c˜ao inicial, e deixa o sistema relaxar at´e atingir o regime estacion´ario:
2. Depois copia a configura¸c˜ao para um novo sistema (sistema B), escolhendo alguns s´ıtios fixos ou aleat´orios para provocar a mudan¸ca (dano inicial):
3. Deixa os dois sistemas evolu´ırem, com a mesma dinˆamica e no caso da regra 1, mesma sequencia de n´umeros aleat´orios, e regra 2, n´umeros aleat´orios diferentes: 4. Ap´os um tempo de relaxa¸c˜ao, mede-se qu˜ao diferente est˜ao as duas c´opias atrav´es
da distˆancia de Hamming.
Se a distˆancia de Hamming for nula, ap´os os passos acima, o dano desapareceu. Caso contr´ario, o dano se propagou ao longo de todo o sistema. Para obter o diagrama de fases com a fase ativa dividida em duas partes (fase ca´otica e n˜ao-ca´otica), como foi mostrado na figura 1.8, vamos usar o MBA e adaptar a equa¸c˜ao de recorrˆencia 1.10 que usamos anteriormente. As principais mudan¸cas s˜ao:
1. Vamos deixar p1 fixo, e procurar p2:
2. Vamos substituirρ, que caracteriza a fase ativa, por Ψ que caracteriza a fase ca´otica:
Fazendo as substiui¸c˜oes, a equa¸c˜ao de recorrˆencia para a fase ca´otica fica:
p2(L, t+ 1) =p2(L, t) +b′[Ψ(t)−(1/L)] (1.15)
onde as constantes b′ ´e um pequeno valor positivo que controla a raz˜ao de convergˆencia
para a fronteira cr´ıtica. Quando a fronteira cr´ıtica ´e alcan¸cada, flutua¸c˜oes da ordem O(1/L) ocorrem em torno do ponto cr´ıtico procurado. An´alogo com o que fizemos ante-riormente, para cada passo t, temos um valor diferente de p2, e uma configura¸c˜ao inicial
diferente (50% η = 1; 50% η = 0). Antes de provocar o dano no sistema, deixamos o sistema relaxar para que ele entre no estado estacion´ario. O tempo de relaxa¸c˜ao que usamos foi t′rel = 1000 para p1 = 0,825 e t
′
rel = 200 para os demais pontos (p1 ≥ 0,85).
tempo para atingir o regime estacion´ario. Ap´os atingir o regime estacion´ario, provocamos o dano no sistema (Ψ(0) = 0,5). Deixamos os sistemas A e B relaxarem at´e um certo tempo de relaxa¸c˜ao trel, usando a mesma sequˆencia de n´umeros aleat´orios, medimos o
valor do dano atrav´es da equa¸c˜ao 1.14, e usamos seu valor na equa¸c˜ao de recorrˆencia 1.15 para obter o novo valor dep2. Depois de aplicar a equa¸c˜ao de recorrˆencia algumas vezes,
dependendo do valor de b′ desta equa¸c˜ao, podemos obter uma convergˆencia depois de
t= 100 passos. Obtemos a criticalidade independente do valor inicial dep2, basta que ele
esteja no dentro do dom´ınio da vari´avel, (0≤p2 ≤1). Os nossos dados novamente
confir-mam que os valores estacion´arios obtidos com MBA s˜ao fortemente dependentes do trel,
com comportamento an´alogo aos da fronteira congelada-ativa, como mostrado nas figuras 1.5 e 1.6. Para obter p2C, ou seja, o ponto cr´ıtico no limite termodinˆamico, precisamos
fazer inicialmente extrapola¸c˜oes para um tempo infinito de relaxa¸c˜ao (trel → ∞), usando
um ajuste n˜ao-linear da equa¸c˜ao 1.16 para umLfixo. Os passos a seguir s˜ao an´alogos ao que fizemos anteriormente, no qual usaremos os mesmos tempos de relaxa¸c˜ao e n´umero de amostras.
p2(L, trel)−p¯2(L, trel → ∞)∼t−α
′
rel (1.16)
E com os valores de ¯p2(L, trel → ∞)≡p¯2(L), faremos outra extrapola¸c˜ao para obter o
comportamento paraL→ ∞, usando a rela¸c˜ao 1.17 para obter p2C que ´e o ponto cr´ıtico
que procuramos.
¯
p2(L)−p2C ∼L−1/ν
′
Na figura 1.10 mostramos a extrapola¸c˜ao para L→ ∞ parap1 = 1,0. O expoente da
extrapola¸c˜ao ´e 1/ν′
⊥ = 0,915.
Figura 1.10: Extrapola¸c˜ao para tamanho infinito (L→ ∞).
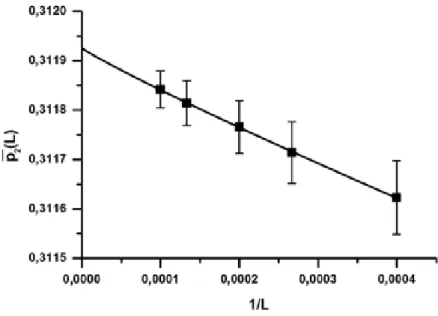
O diagrama que mostramos anteriormente, figura 1.8, foi obtido usando o MBA, e na tabela 1.3, mostramos os valores dos pontos cr´ıticos que obtemos, e comparamos com os da literatura. Tamb´em obtemos uma precis˜ao muito boa, considerando que o erro est´a na terceira casa decimal.
p1 valores conhecidos dep2 valores dep2C obtidos com o MBA
0,825 - 0,0946±0,0003
0,850 0,1400±0,0002 [69] 0,1390±0,0003
0,900 - 0,2092±0,0001
0,950 - 0,2641±0,0003
1,000 0,31215±0,00004 [69] 0,3119±0,0002
Al´em dos pontos cr´ıticos, comentamos anteriormente que a transi¸c˜ao de fase fica bem caracterizada com o tripleto de expoentes cr´ıticos (β, ν⊥, νk), e na terceira se¸c˜ao mostramos
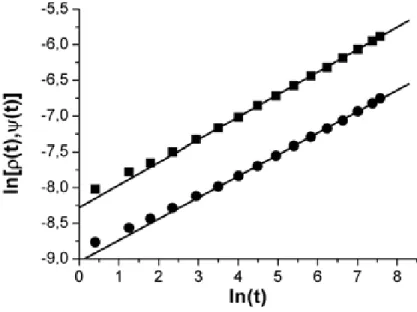
que podemos obter alguns expoentes cr´ıticos atrav´es do comportamento dos parˆametros de ordem no tempo (regime de tempo curto). Nesta t´ecnica analisamos a propaga¸c˜ao de atividade, e do dano, no tempo com o ponto cr´ıtico que obtemos com o MBA (ta-belas 1.2 e 1.3). Em ambas as fronteiras, temos duas formas de fazer essa an´alise, a primeira, iniciamos o sistema com o m´aximo valor do parˆametro de ordem, ou seja,ρ= 1 (sistema saturado) na fronteira congelada-ativa, e na ca´otica n˜ao-ca´otica, Ψ = 0,5. Na segunda fronteira, s´o podemos provocar o dano ap´os atingir o regime estacion´ario. O tempo m´aximo que usamos foi t= 2000, e o comportamento dos parˆametros de ordem ´e proporcional aβ/νk, na fronteira congelada-ativa, eβ′/νk′. Na figura 1.11 mostramos este
comportamento na escala logar´ıtmica para 10000 amostras.
Figura 1.11: Comportamento no RTC com amostra saturada (fronteira congelada-ativa), e com 50% dos s´ıtios modificados (fronteira ca´otica-n˜ao-ca´otica).
Na fronteira congelada-ativa, em todos os pontos cr´ıticos, com exce¸c˜ao dos extremos, todos tiveram o mesmo valor. No extremo correspondente a p2 = 0, n˜ao tivemos
J´a no extremo correspondente `a p2 = 1,0, o sistema sempre fica saturado. A segunda
an´alise, corresponde a iniciarmos o sistema no ponto cr´ıtico com apenas um s´ıtio ativo na fronteira congelada-ativa, e um dano unit´ario na fronteira ca´otica n˜ao-ca´otica. Na primeira fronteira, escolhe-se um s´ıtio aleatoriamente na rede para ficar ativo ηi = 1,
enquanto que os demais ficam sem atividade ηj = 0 ∀j 6= i. J´a na segunda fronteira,
deixamos o sistema entrar no regime estacion´ario, e modificamos somente um s´ıtio, ou seja, os sistemas A e B s´o s˜ao diferentes devido a um s´ıtio, ou seja, ηB
i = 1 − ηiA e
ηB
j =ηjA∀j 6=i. Em ambos os casos, o parˆametro de ordem cresce proporcional ao tempo,
e o expoente neste caso ´e denominado deθ, para a primeira fronteira, eθ′, para a segunda.
Os expoentes de propaga¸c˜ao β/νk, θ, e z, denominado de expoente dinˆamico, satisfazem
a rela¸c˜ao de hiperescala
2β νk
+θ = 1
z (1.18)
Usando novamente um tempo m´aximo de rela¸c˜ao t = 2000, e 10000 amostras inde-pendentes, obtemos o comportamento mostrado na figura 1.12 na escala logar´ıtmica.
Na tabela 1.4, mostramos os expoentes que obtemos com o RTC nas duas fronteiras.
β/νk 0,155±0,005
θ 0,308±0,005 β′/ν′
k 0,154±0,006
θ′ 0,316±0,004
Tabela 1.4: Tabela com os expoentes cr´ıticos obtidos com o RTC.
Em resumo, com as rela¸c˜oes do regime de tempo curto presentes na tabela 1.4, e com o expoente obtido com o MBA, obtemos os seguintes expoentes, que comparamos com os da literatura.
Expoentes Fronteira Fronteira PD
Cr´ıticos Congelada-Ativa N˜ao-Ca´otica Ca´otica Ref. [62] ν⊥, ν⊥′ 1,099±0,015 1,094±0,014 1,096854(4)
θ, θ′ 0,308±0,005 0,316±0,004 0,313686(8)
z, z′ 1,618±0,039 1,602±0,041 1,580745(10)
νk, νk′ 1,778±0,052 1,752±0,037 1,733847(6)
β, β′ 0,276±0,009 0,270±0,011 0,276486(8)
Tabela 1.5: Tabela com os expoentes cr´ıticos, para ambas as fronteiras, obtidos com o RTC e o MBA.
Com estes resultados, com exce¸c˜ao do extremo superior, todos os pontos da fron-teira congelada-ativa pertencem `a classe de universalidade da PD, ou seja, apresentam os mesmos expoentes cr´ıticos, e o extremo superior, p2 = 1,0 e p1 = 0,5, pertence `a
1.5
Processo de Contato
Comentamos anteriormente 1ue um dos modelos b´asicos da ME de n˜ao-equil´ıbrio ´e o processo de contato. Este modelo foi proposto inicialmente por Harris [34] em 1974, e vastamente explorado na literatura [72, 73, 74, 75, 76]. Modelo criado para explicar a propaga¸c˜ao de uma epidemia simples, no qual ´e governado por uma equa¸c˜ao mestra, apresenta uma transi¸c˜ao de fase no modelo unidimensional [1, 35]. Neste modelo, uma rede d-dimensional L, possui Ld s´ıtios que podem assumir dois estados, η = 0 ou η = 1,
indiv´ıduo s˜ao ou infectado (doente). Um indiv´ıduo pode ficar infectado se pelo menos um de seus vizinhos estiver infectado. A taxa de infec¸c˜aoλe o n´umero de vizinhos infectados, n, define as probabilidades de transi¸c˜oes de um estado para outro como podemos ver na equa¸c˜oes 1.19, para cria¸c˜ao, e 1.20, para aniquila¸c˜ao.
p(0→1) = nλ
2d(1 +λ) (1.19)
p(1→0) = 1−p(0→1) (1.20)
Na figura 1.13 mostramos as taxas de transi¸c˜ao no modelo unidimensional, onde o c´ırculo (figura cheia) representa o estado ηi = 1 e a circunferˆencia (figura vazia), ηi = 0.
Figura 1.13: Taxas de transi¸c˜ao para o caso unidimensional do PC [4].
os Ld da rede d-dimensional. A cada unidade de tempo, Ld s´ıtios s˜ao visitados, ou seja,
para cada s´ıtio sorteado o tempo sofre um incremento ∆t= 1/Ld mesmo que n˜ao ocorra
cria¸c˜ao ou aniquila¸c˜ao. A desvantagem deste m´etodo ´e a baixa eficiˆencia quando temos situa¸c˜oes de baixa densidade de s´ıtios ocupados j´a que o sorteio na grande maioria vai para s´ıtios vazios. Uma maneira equivalente e mais eficiente, principalmente em situa¸c˜oes com poucos s´ıtios ativos, ´e fazer uma lista com os NA s´ıtios ocupados, onde o sorteio
agora ´e feito aleatoriamente a partir desta lista. O incremento temporal n˜ao ´e fixo e varia de acordo com a atividade do sistema, ou seja, ∆t = 1/NA. O processo de cria¸c˜ao ocorre
com probabilidade p = λ/(1 +λ) e uma aniquila¸c˜ao ocorre com probabilidade 1−p. No caso unidimensional, na cria¸c˜ao, um dos primeiros vizinhos do s´ıtio ´e escolhido com probabilidade 1/2 para que a nova part´ıcula seja criada caso ele seja vazio. Observando a express˜ao 1.19, isto corresponde ao cason = 2, onde por hip´otese o outro vizinho do s´ıtio escolhido ´e vazio. Vamos considerar um s´ıtio vazio que tenha dois vizinhos preenchidos, uma part´ıcula pode ser criada pela part´ıcula da esquerda comp = (1/2)λ/(1 +λ), onde (1/2) se remete a escolha do s´ıtio da esquerda pelo s´ıtio vazio em quest˜ao. A mesma coisa acontece com o da direita por simetria. O que resulta em p = (1/2)λ/(1 +λ) + (1/2)λ/(1 +λ) = λ/(1 +λ), equivalente a equa¸c˜ao 1.19 para n= 2 e d= 1, o que mostra que a segunda maneira de implementar o CP ´e equivalente `a primeira (convencional). As formula¸c˜oes que comentamos se diferem no regime de tempos curtos, mas possuem a mesma propriedade estacion´aria em tempos longos [4].
No PC existe a infec¸c˜ao e a cura espontˆanea. A cura n˜ao garante a imunidade do indiv´ıduo. Se todos os s´ıtios ficam com valores nulos, ou seja, todos os indiv´ıduos do sistema ficam curados, a doen¸ca desaparece. Neste caso, o sistema fica est´avel em um estado absorvente caracterizado pela ausˆencia de atividade, ou seja, nenhum indiv´ıduo fica infectado nesta regi˜ao. O sistema tamb´em pode evoluir para um estado ativo est´avel, que neste caso n˜ao ´e necess´ario que todos os indiv´ıduos fiquem infectados, basta que uma certa quantidade de s´ıtios permane¸cam ativos. A fronteira entre a regi˜ao ativa e a regi˜ao congelada ´e caracterizada pela taxa cr´ıticaλC e at´e o momento n˜ao existe resultado exato
para ele. Existem resultados para simula¸c˜oes Monte Carlo [4, 77] e an´alises de s´erie [4] no qual fornecem λC ≃3,2978 [4, 59]. Um resultado mais satisfat´orio ´e λC = 3,29785(5)
na segunda se¸c˜ao deste cap´ıtulo. A equa¸c˜ao de recorrˆencia do MBA para o PC ser´a fun¸c˜ao da taxa de infec¸c˜ao e do parˆametro de ordem. O parˆametro de ordem ´e a ”magnetiza¸c˜ao”, ou densidade de atividade, idˆentica ao do ACDK na caracteriza¸c˜ao da fronteira congelada-ativa. Trabalharemos com a vari´avel p em vez deλ, que se relacionam atrav´es da equa¸c˜ao 1.19. Assim a equa¸c˜ao de recorrˆencia fica:
p(L, t+ 1) =p(L, t)−b[ρ(t)−(1/L)] (1.21) onde a constanteb´e um pequeno valor positivo que controla a raz˜ao de convergˆencia para a fronteira cr´ıtica, e ρ(t) ´e dada pela equa¸c˜ao 1.9. A equa¸c˜ao 1.21 ´e bem parecida com a 1.10, com uma diferen¸ca que no ACDK t´ınhamos duas probabilidades, e no PC s´o temos uma. O comportamento destas equa¸c˜oes s˜ao idˆenticos, ou seja, acontecem flutua¸c˜oes da ordem O(1/L) quando a criticalidade ´e alcan¸cada, e isso independe do valor inicial (0 ≤ p ≤ 1). Os nossos resultados confirmam que os valores estacion´arios obtidos com MBA para o PC s˜ao fortemente dependentes dotrel, idˆentico ao ACDK. Para um Lfixo,
faremos extrapola¸c˜oes com a equa¸c˜ao 1.22.
p(L, trel)−p(L, t¯ rel → ∞)∼t−relα (1.22)
onde α ´e o expoente de ajuste, p(L, trel) ´e o valor m´edio dos valores obtidos com o
MBA na regi˜ao estacion´aria, e ¯p(L, trel → ∞) ´e o valor extrapolado quando trel → ∞.
Usando a nota¸c˜ao ¯p1(L, trel → ∞) ≡ p¯1(L), para obter esta vari´avel, usamos v´arios
tempos de relaxa¸c˜ao, num total de 11 pontos, na extrapola¸c˜ao, e para cada um destes pontos temos 3 amostras que foram permutadas para obtermos 177147 gr´aficos a serem ajustados. Os tempos de relaxa¸c˜ao usados variaram detrel = 1024 `a trel= 1048576, e no
regime estacion´ario do MBA (a partir de 150 passos) usamos os 2150 passos seguintes para o menor tempo de relaxa¸c˜ao, e 150 passos, para o maior tempo de relaxa¸c˜ao. Depois que obtemos os valores de ¯p(L) para cada L, fazemos outra extrapola¸c˜ao para obter o limite termodinˆamico para L → ∞, usando novamente uma extrapola¸c˜ao n˜ao-linear, equa¸c˜ao 1.12 para obter pC que ´e o ponto cr´ıtico que procuramos.
¯
Simulamos tamanhos que variam de L = 128 `a L = 16384, sendo que para o ajuste, usamosL= 2048, L= 4096,L= 8192 e L= 16384, como podemos ver na figura 1.14.
Figura 1.14: Extrapola¸c˜ao para tamanho infinito (L→ ∞).
O valor de p = 0,76733(1)(λ = 3,2979(1)) que obtemos ´e compat´ıvel com a melhor estimativa da literatura.
Como vimos, no PC existe a infec¸c˜ao e a cura espontˆanea que n˜ao garante a imunidade do indiv´ıduo. Para garantir a imunidade parcial, vamos incluir um tempo de imuniza¸c˜ao (tim) para o PC, isto ´e, vamos garantir um per´ıodo de imunidade ao indiv´ıduo no sistema,
e chamaremos dePC temporizado. Quando o tempo de imuniza¸c˜ao for nulo (tim= 0),
obtemos oPC tradicionalque mostramos anteriormente. Quando o indiv´ıduo sofre uma infec¸c˜ao, e ´e curado, ele passa um certo tempo imunizado, ou seja, durante este per´ıodo, mesmo que ele tenha contato com indiv´ıduos infectados, ele n˜ao ficar´a doente. Passado o tempo de imuniza¸c˜ao, ele poder´a ser infectado novamente, e este tempo ´e presente em sistemas reais, ou seja, quando tomamos uma vacina, passamos um certo tempo imune at´e surgir uma nova varia¸c˜ao desta doen¸ca, e o exemplo mais comum ´e o v´ırus da gripe que sofrem v´arias muta¸c˜oes durante os ´ultimos anos. Vamos usar o MBA para obter o ponto cr´ıtico para este caso usando cinco tempos de imuniza¸c˜ao (tim = 1,0;tim = 2,0;tim =
para obter o ponto cr´ıtico para o PC temporizado. Fazendo a extrapola¸c˜ao temporal, obtemos ¯p(L), e fazendo a extrapola¸c˜ao em L, obtemos o limite termodinˆamico, ou seja, pC. Na figura mostramos duas extrapola¸c˜oes temporais para dois tempos de imuniza¸c˜ao.
Figura 1.15: Extrapola¸c˜ao para tamanho infinito (L → ∞) para tim = 2 (gr´afico maior), e
tim= 5 (gr´afico menor).
Na tabela 1.6 mostramos os valores que obtemos para todos os tempos de imuniza¸c˜ao estudados.
tim = 0,0 0,76733(5)
tim = 1,0 0,80967(5)
tim = 2,0 0,83651(5)
tim = 3,0 0,85545(5)
tim = 4,0 0,86975(5)
tim = 5,0 0,88106(5)
Na figura 1.16 mostramos o comportamento de pC versus tim.
Figura 1.16: Comportamento de pC versustim.
Conhecendo os pontos cr´ıticos, vamos determinar, a partir do RTC, rela¸c˜oes que contˆem o tripleto de expoentes cr´ıticos (β, ν⊥, νk). Da mesma forma que fizemos para
o ACDK na fronteira congelada-ativa, faremos para o PC. Quando iniciamos o sistema totalmente saturado, ou seja, todos os s´ıtios com estado ηi = 1, obtemos a rela¸c˜ao β/νk
(decaimento do parˆametro de ordem), e quando iniciamos o sistema com apenas um s´ıtio ativo, obtemos o expoente θ (crescimento do parˆametro de ordem). Usando L = 10000, mostramos na figura 1.17 o comportamento para tim = 0 e tim = 5 do decaimento de ρ
usando 1000 amostras, e na figura 1.18 para 20000 amostras para tim = 0 e tim = 3, o
Figura 1.17: Comportamento no RTC deρ do PC tradicional (tim= 0 (quadrado)) e
tempori-zado (tim= 5 (c´ırculo)), quando iniciamos o sistema saturado.
Figura 1.18: Comportamento no RTC deρ do PC tradicional (tim= 0 (quadrado)) e
Na tabela 1.7 resumimos os expoentes obtidos com o RTC para os seis tempos de imuniza¸c˜ao estudado (0≤tim≤5,0).
tim β/νk θ
0,0 0,161(2) 0,307(4) 1,0 0,164(5) 0,334(9) 2,0 0,165(4) 0,339(5) 3,0 0,165(3) 0,336(5) 4,0 0,164(5) 0,336(5) 5,0 0,166(4) 0,332(7)
Tabela 1.7: Tabela com as rela¸c˜oes obtidas com o RTC para o PC tradicional e temporizado.
Usando o valor de ν⊥ obtidos, e os valores dos expoentes do regime de tempo curto,
obtemos os tripleto de expoente cr´ıticos, que ´e apresentado na tabela 1.8.
tim β νk ν⊥
0,0 0,282± 0,009 1,749 ± 0,038 1,10 ± 0,01 1,0 0,273± 0,021 1,657 ± 0,077 1,10 ± 0,02 2,0 0,271± 0,017 1,644 ± 0,063 1,10 ± 0,02 3,0 0,273± 0,015 1,652 ± 0,058 1,10 ± 0,02 4,0 0,272± 0,020 1,657 ± 0,069 1,10 ± 0,02 5,0 0,275± 0,019 1,657 ± 0,074 1,10 ± 0,02
Tabela 1.8: Tabela com as estimativas de expoentes cr´ıticos do PC tradicional e temporizado.
Atrav´es das tabelas 1.7 e 1.8 observamos que o tempo de imuniza¸c˜ao nulo (tim = 0)
pertence a classe de universalidade da PD, resultado j´a conhecido na literatura. Para tem-pos de imuniza¸c˜ao diferente de zero (processo de contato temporizado), sabemos que ele ´e uma vers˜ao do modelo SIRS (suscept´ıvel, infectado,recuperado, suscept´ıvel) e pertence a classe de universalidade da PD [80, 81]. As estimativas do expoenteνk possui um erro na
1.6
Conclus˜
oes
Cap´ıtulo 2
Pilhas de Areia
2.1
Introdu¸
c˜
ao
No cap´ıtulo 1, comentamos sobre a criticalidade auto-organizada (CAC), e vimos que o modelo padr˜ao para explicar este conceito ´e a pilha de areia [7, 8]. Neste modelo, a medida que adicionamos gr˜aos ao sistema, ele tende para uma situa¸c˜ao cr´ıtica onde surgem avalanches de v´arios tamanhos, ou seja, estas avalanches seguem uma lei de potˆencia. A CAC presente neste modelo, e a adi¸c˜ao de part´ıculas, que ´e o mecanismo de controle ou dinˆamica do sistema, levam o sistema para sua regi˜ao cr´ıtica [82, 83]. Neste caso, o sistema apresenta uma transi¸c˜ao de fase entre uma fase absorvente e outra ativa nos modelos das pilhas de areia conservativas, que possuem uma dinˆamica local e um n´umero fixo de part´ıculas [82, 84, 85, 86, 87, 88, 89]. Estas pilhas de areia s˜ao caracterizadas pela n˜ao conserva¸c˜ao do parˆametro de ordem (fra¸c˜ao de s´ıtios ativos), que ´e ligado ao campo conservativo, e n˜ao envolve a regi˜ao sem atividade [90]. As pilhas de areia conservativas pertencem `a classe de universalidade da percola¸c˜ao direcionada conservativa (PDC), ´e diferente da percola¸c˜ao direcionada padr˜ao [25], que comentamos no cap´ıtulo anterior com o ACDK e o PC.
fases, e obt´em as principais simetrias e leis de conserva¸c˜ao do sistema. Importantes passos nesta dire¸c˜ao s˜ao os recentes estudos da equa¸c˜ao de Langevin [25, 91] para PDC. Os valo-res dos expoentes cr´ıticos mostrados na referˆencia [25] est˜ao em boa concordˆancia com os obtidos nas simula¸c˜oes de g´as de rede conservativo [92, 93], que exibem a mesma simetria e leis de conserva¸c˜ao das pilhas de areia estoc´aticas. Os expoentes obtidos da equa¸c˜ao de Langevin tamb´em s˜ao consistentes com as melhores estimativas das pilhas de areia bidimensionais [25]. Agora temos uma boa evidˆencia que a pilha de areia unidimensional pertence `a classe de universalidade da PDC [94, 95].
Neste cap´ıtulo mostraremos um aspecto das pilhas de areia que tem recebido pouca aten¸c˜ao na literatura, a difus˜ao de part´ıculas nos modelos N˜ao-restrito e Restrito das pilhas de areia conservativas. A dinˆamica nestes modelos envolve a transferˆencia de part´ıculas entre os s´ıtios vizinhos, e os resultados das nossas simula¸c˜oes Monte Carlo mostram que a contante de difus˜ao D, definida atrav´es da rela¸c˜ao h(∆x)2i = 2Dt, onde
∆x ´e o deslocamento de cada gr˜ao, possui um comportamento de escala similar ao do parˆametro de ordem ρ, conforme mostraremos nas pr´oximas se¸c˜oes. Na pr´oxima se¸c˜ao detalharemos os dois modelos estudados, e logo ap´os mostraremos os resultados das nossas simula¸c˜oes computacionais.
2.2
Modelos
Nesta tese estudaremos duas vers˜oes do modelo unidimensional das pilhas de areia conservativas, relacionada ao modelo de Manna [96, 97]. Nestes sistemas a configura¸c˜ao ´e definida pelo conjunto de vari´aveis ocupadasz1, ..., zL, ondezi ´e o n´umero de part´ıculas de
cada s´ıtio de uma rede unidimensionalL com condi¸c˜oes peri´odicas de contorno. Um s´ıtio ´e considerado ativo quando possui duas ou mais part´ıculas (zi ≥2). Designamos por NA
o n´umero de s´ıtios ativos na rede. Os dois modelos que estudaremos s˜ao vers˜oes de um processo de Markov no tempo cont´ınuo. Neste caso o incremento temporal ´e ∆t = 1/NA,
e a dinˆamica em cada intervalo de tempo envolve a transferˆencia de part´ıculas de um dos s´ıtios ativos para os seus primeiros vizinhos. A cada intervalo o n´umero de s´ıtios ativo (NA) pode mudar, e a dinˆamica cessar´a quando n˜ao existir s´ıtios ativos. Em ambos os
diferenciam da seguinte forma:
Modelo N˜ao-Restrito (I) [98]: Quando o s´ıtio idecai, duas part´ıculas s˜ao transferidas deste s´ıtio para os primeiros vizinhos (i−1 e/ou i+ 1) de maneira independente com probabilidades iguais.
Modelo Restrito (II) [99, 94]: A dinˆamica ´e a mesma do modelo I, exceto que o s´ıtio n˜ao pode ter mais de duas part´ıculas. Se na transferˆencia, o s´ıtio que recebeu a part´ıcula possui mais de dois gr˜aos, o excesso ´e devolvido ao s´ıtio que provocou o decaimento.
Devido ao modelo II ter um conjunto pequeno de estados, isto faz com que ele seja mais conveniente para an´alises por aproxima¸c˜ao de cluster [100]. Existe uma clara evidˆencia num´erica que o modelo II pertence `a classe de universalidade da PDC [94]; O modelo I compartilha a mesma simetria e quantidade conservada do modelo II, desta forma tamb´em pertence a classe da PDC.
Nas pilhas de areia conservativas, a densidade de part´ıculaspfunciona como parˆametro de controle. Na regi˜ao subcr´ıtica (p > pc), o sistema ap´os um certo de tempo entra no
estado absorvente (NA = 0), enquanto que para p > pc, a atividade continua
indefi-nidamente, no limite de tamanho infinito. Para sistemas finitos, a atividade continua indefinidademente para p > 1 (1 ≤ p≤ 2, para o caso restrito). O parˆametro de ordem associado a esta transi¸c˜ao de fase ´e a densidade de atividadeρ, dado pela fra¸c˜ao de s´ıtios ativos. Simula¸c˜oes mostram que existe uma transi¸c˜ao de fase cont´ınua, cujas melhores es-timativas parapc s˜ao 0,9488 e 0,92978, para os modelos I e II, respectivamente. Observe
que quandop > 1, os s´ıtios ativos sempre existem, e note que pc ´e menor que 1.
Na pr´oxima se¸c˜ao mostraremos os resultados das simula¸c˜oes Monte Carlo para o des-locamento quadr´atico m´edioh[∆x]2i, a constante de difus˜aoD, e o parˆametro de ordemρ.
2.3
Simula¸
c˜
oes Monte Carlo
Nesta se¸c˜ao abordaremos a difus˜ao das part´ıculas nos dois modelos de pilhas de areia conservativas que comentamos na se¸c˜ao anterior. Comentamos que nestes modelos quando um s´ıtio ´e ativo, ele est´a apto a transferir part´ıculas para os seus primeiros vizinhos. Para iniciar o estudo da difus˜ao das part´ıculas, usaremos a equa¸c˜ao de difus˜ao usual que n˜ao leva em conta se no sistema existe fonte ou sorvedouro de part´ıculas, conforme est´a expressa na equa¸c˜ao 2.1:
∂̺ ∂t =D
∂2̺
∂t2 (2.1)
A solu¸c˜ao da equa¸c˜ao 2.1 ´e:
̺(t, x)∝e−(x−x0) 2
4Dt (2.2)
O denominador da equa¸c˜ao 2.2 ´e igual ao dobro do desvio quadr´atico m´edio que ´e proporcional a constante de difus˜ao D e comporta-se linearmente com o tempo, como podemos ver na equa¸c˜ao seguinte:
h[∆x]2i= 2Dt (2.3)
onde ∆x=x(t)−x(0). A partir deste resultado, nos modelos que definimos anteriormente, para cada part´ıcula j da rede temos um ∆xj, que iremos definir de maneira equivalente
em termos do n´umero de pulos dado pelas part´ıculas no tempo t para esquerda (h+j(t)), e para a direita (h−j (t)). Fica claro que h+j (0) = h−j (0) = 0. Desta forma, a varia¸c˜ao de
posi¸c˜ao para a part´ıcula fica:
∆xj(t) = h+j(t)−h−j (t) (2.4)
A rela¸c˜ao 2.4 conta toda a hist´oria da part´ıcula j desde a sua posi¸c˜ao inicial xj(0)
at´e a posi¸c˜ao xj(t), ou seja, a cada tempo t a part´ıcula j se difunde, e ∆xj muda por
±1, tal que h[∆xj(t)]2i =hhj+(t) +h−j (t)i ≡ hhj(t)i, isto ´e, o n´umero m´edio de pulos no
h[∆xj(t)]2i= 2Dt (2.5)
Nas nossas simula¸c˜oes, a configura¸c˜ao inicial consiste em distribuir aleatoriamente as N part´ıculas numa rede unidimensional de tamanho L, com a restri¸c˜ao de no m´aximo duas part´ıculas por s´ıtio no modelo II. Quando estudamos somente o parˆametro de ordem ρ nos preocupamos somente com a quantidade de part´ıculas em cada s´ıtio. J´a quando estudamos a difus˜ao, temos que saber quais part´ıculas est˜ao naquele s´ıtio, e isto faz com que nossas simula¸c˜oes agora sejam um pouco mais lentas em rela¸c˜ao ao primeiro estudo, pois temos que guardar a posi¸c˜ao e o deslocamento de todas as part´ıculas (∆xj),
para poder determinar D a partir da equa¸c˜ao 2.5. A identifica¸c˜ao das part´ıculas se d´a no momento da configura¸c˜ao inicial, e n˜ao muda durante a simula¸c˜ao. A dinˆamica dos modelos I e II consiste em sortear um dos NA s´ıtios ativos, e distribuir duas part´ıculas
para os seus primeiros vizinhos. As part´ıculas possuem a mesma probabilidade de ir para esquerda, ou para direita. No modelo I, um s´ıtio ativo temzj part´ıculas, e a probabilidade
de uma part´ıcula ser escolhida ´e 2/zj. Neste caso obrigatoriamente, as duas part´ıculas
escolhidas se difundem para o local sorteado. J´a no modelo II, isso n˜ao acontece, pois temos restri¸c˜ao de altura, ou seja, no m´aximo duas part´ıculas por s´ıtio. Dependendo da ocupa¸c˜ao da vizinhan¸ca, a difus˜ao pode acontecer totalmente (as duas part´ıculas foram para o(s) s´ıtio(s) escolhido(s), parcialmente (uma das part´ıculas permaneceu no s´ıtio de origem), ou n˜ao acontecer (as duas part´ıculas permanecem no s´ıtio de origem). Na figura 2.1 mostramos uma configura¸c˜ao t´ıpica do modelo II. As part´ıculas em azul ou branco pertencem ao s´ıtio, e a cor vermelha indica que a part´ıcula n˜ao pode permancer naquele local e tem que voltar ao s´ıtio de origem. Quando as part´ıculas ficam na cor azul, o s´ıtio ´e ativo. A ocupa¸cao de s´ıtios pr´oximos s˜ao correlacionados, e o tempo de espera entre deslocamentos suscessivos de uma da part´ıcula n˜ao s˜ao independentes. Por estas raz˜oes, a rela¸c˜ao entre a quantidade de pulos e a fra¸c˜ao de s´ıtios ativos envolve efeitos sutis, diferente nos dois modelos estudados. Apesar disso ´e razo´avel esperar que para p→ pc,
Figura 2.1: Exemplo de uma configura¸c˜ao t´ıpica que acontece no modelo II. As part´ıculas em azul ou branco pertencem ao s´ıtio, e em vermelho indica uma configura¸c˜ao n˜ao permitida devido
a restri¸c˜ao do modelo, logo o excesso ´e devolvido ao s´ıtio de origem. a) e b) Difus˜ao total. c) a
Com as regras estabelecidas para a difus˜ao de part´ıculas na rede, simulamos os modelos I e II com condi¸c˜oes peri´odicas para redes de quatro tamanhosL= 6 250, 12 500, 25 000, e 50 000, usando oito amostras independentes para o menor tamanho, seis paraL= 12 500, e quatro para os demais tamanhos. Usamos 11 valores diferentes dep, entre o pc ep= 2.
As simula¸c˜oes foram at´e um tempo m´aximo de 106 `a 6×109 para pontos pr´oximos do
ponto cr´ıtico. Tamb´em usamos caixas logar´ıtmicas na an´alise de dados.
Inicialmente, analisamos a evolu¸c˜ao temporal do deslocamento quadr´atico m´edio das part´ıculas, equa¸c˜ao 2.6.
h[∆xj(t)]2i ∝tγ (2.6)
Este comportamento nos permite caracterizar o tipo de difus˜ao [101, 102]. A difus˜ao usual ´e quando o deslocamento quadr´atico ´e proporcional ao tempo (γ = 1), e n˜ao-linear (difus˜ao anˆomala) quando γ < 1, ou γ > 1. Neste caso temos o processo de difus˜ao anˆomala subdifusivo, ou superdifusivo, respectivamente. Para os dois modelos que estu-damos, analisamos a evolu¸c˜ao temporal do deslocamento quadr´atico usando trˆes valores diferentes de p (fizemos a m´edia sobre 4 amostras) para L = 50 000. O primeiro corres-ponde ao comportamento subdifusivo das part´ıculas no regime inicial (linha tracejada das figuras 2.2 e 2.3) que segue um comportamento com γ = 0,86(1). Neste caso ocorre um crescimento lento do desvio quadr´atico m´edio, que se acentua quando p → pc, ou seja,
quanto mais pr´oximo do ponto cr´ıtico, maior o intervalo que ocorre a difus˜ao anˆomala. O segundo corresponde a regi˜ao estacion´aria, que comentaremos adiante, confirmando que
h[∆xj(t)]2icresce linearmente com t (linha cont´ınua das figuras 2.2 e 2.3), o que confirma
a rela¸c˜ao 2.5. O tempo de simula¸c˜ao para obter o comportamento linear de h[∆xj(t)]2i
![Figura 1.9: Diagrama de Fases da ACDK. Neste diagrama evidˆenciamos as duas regras usadas na TPG [3].](https://thumb-eu.123doks.com/thumbv2/123dok_br/15582236.103066/34.918.213.702.467.773/figura-diagrama-fases-neste-diagrama-evidˆenciamos-regras-usadas.webp)