UNIVERSIDADEFEDERALDO RIO GRANDE DO NORTE
UNIVERSIDADEFEDERAL DORIOGRANDE DO NORTE
CENTRO DETECNOLOGIA
PROGRAMA DEPÓS-GRADUAÇÃO EMENGENHARIAELÉTRICA E DECOMPUTAÇÃO
Estabilizador de Sistema de Potência para
Máquinas Síncronas de Polos Salientes
Utilizando a Transformada Wavelet
Cecilio Martins de Sousa Neto
Orientador: Prof. Dr. Flavio Bezerra Costa
Co-orientador: Prof. Dr. Ricardo Lúcio de Araújo Ribeiro
Dissertação de Mestrado apresentada ao
Programa de Pós-Graduação em Engenharia Elétrica e de Computação da UFRN (área de concentração: Automação e Sistemas) como parte dos requisitos para obtenção do título de Mestre em Ciências.
Seção de Informação e Referência
Catalogação da publicação na fonte. UFRN / Biblioteca Central Zila Mamede
Sousa Neto, Cecilio Martins de
Estabilizador de Sistema de Potência para Máquinas Síncronas de Polos Sali-entes Utilizando a Transformada Wavelet/ Cecilio Martins de Sousa Neto - Natal, RN, 2013
116 f. ;il
Orientador: Flavio Bezerra Costa
Co-orientador: Ricardo Lúcio de Araújo Ribeiro
Dissertação (mestrado) - Universidade Federal do Rio Grande do Norte. Cen-tro de Tecnologia. Programa de Pós-Graduação em Engenharia Elétrica e de Computação.
1. Estabilizador de sistema de potência - Dissertação. 2. Regulador automá-tico de tensão - Dissertação 3. Gerador síncrono de polos salientes - Dissertação. 4. Transformada wavelet - Dissertação. I. Costa, Flavio Bezerra. II. Ribeiro, Ricardo Lúcio de Araújo. III. Universidade Federal do Rio Grande do Norte. IV. Estabilizador de Sistema de Potência para Máquinas Síncronas de Polos Salien-tes Utilizando a Transformada Wavelet.
Estabilizador de Sistema de Potência para
Máquinas Síncronas de Polos Salientes
Utilizando a Transformada Wavelet
Cecilio Martins de Sousa Neto
Dissertação de Mestrado aprovada em 05 de julho de 2013 pela banca examinadora com-posta pelos seguintes membros:
Prof. Dr. Flávio Bezerra Costa (Orientador) . . . ECT/UFRN
Prof. Dr. Ricardo Lúcio de Araújo Ribeiro (Co-orientador) . . . DEE/UFRN
Prof. Dr. Alexandre Cunha Oliveira. . . DEE/UFCG
Agradecimentos
Ao meu orientador e co-orientador, professores Flavio Bezerra Costa e Ricardo Lúcio de Araújo Ribeiro, pela dedicada orientação e ajuda ao longo dessa jornada.
Ao professor Luiz Marcos Gonçalves pelo apoio durante os momentos difíceis.
Aos amigos do LEPER, Rodrigo Lopes Barreto, Thiago de Oliveira Alves Rocha, Suélio Fernandes Carolino, Raphaell Maciel de Sousa, André Melo, Franklin Hebert, Marcos Meira, José Rômulo Vieira Lira, Ernano Arrais, Christiam Cesar e Jailton Ferreira pela dedicação.
À minha família, em especial aos meus pais, meus irmãos e minha esposa Maria Izabel pelo apoio durante esta jornada.
Resumo
Os estabilizadores de sistemas de potência são empregados para suprimir oscilações eletromecânicas, de baixa frequência, e estender os limites de estabilidade de geradores síncronos. Propõe-se nesta dissertação de mestrado um estabilizador de sistema de potên-cia baseado nas wavelets, composta por uma nova metodologia para extração e compensa-ção de oscilações eletromecânicas em sistemas elétricos de potência baseada nas energias dos coeficientes de aproximação da transformada wavelet discreta redundante, com o ob-jetivo de reduzir os efeitos de atraso e atenuações dos estabilizadores de sistemas de po-tência convencionais. Por outro lado, as energias dos coeficientes wavelet são utilizadas para detecção das oscilações elétricas e habilitação do estabilizador de sistema de potên-cia proposto apenas nas situações de falta. A eficápotên-cia do desempenho do estabilizador de sistema de potência proposto foi comprovada por meio de resultados experimentais, cujo desempenho foi comparado com o desempenho do estabilizador de sistema de potência convencional. Além disso, os efeitos das wavelets mães também foram avaliados.
Palavras-chave: Estabilizador de Sistemas de Potência, Regulador Automático de
Abstract
The power system stabilizers are used to suppress low-frequency electromechanical oscillations and improve the synchronous generator stability limits. This master thesis proposes a wavelet-based power system stabilizer, composed of a new methodology for extraction and compensation of electromechanical oscillations in electrical power systems based on the scaling coefficient energy of the maximal overlap discrete wavelet transform in order to reduce the effects of delay and attenuation of conventional power system sta-bilizers. Moreover, the wavelet coefficient energy is used for electric oscillation detection and triggering the power system stabilizer only in fault situations. The performance of the proposed power system stabilizer was assessed with experimental results and comparison with the conventional power system stabilizer. Furthermore, the effects of the mother wavelet were also evaluated in this work.
Keywords: Power System Stabilizer, Automatic Voltage Regulator, Salient Pole
Sumário
Sumário i
Lista de Figuras iii
Lista de Tabelas vi
Lista de Simbolos viii
Lista de Abreviaturas e Siglas x
1 Introdução 1
1.1 Motivação . . . 4
1.2 Objetivos . . . 4
1.3 Contribuições . . . 5
1.4 Organização do Trabalho . . . 6
2 Estado da Arte 7 2.1 Estruturas Convencionais de PSSs . . . 7
2.2 Estruturas Não-Convencionais de PSSs . . . 8
2.3 Detecção de Distúrbios Transitórios . . . 10
2.4 Resumo da Revisão Bibliográfica . . . 12
3 Gerador Síncrono 14 3.1 Descrição Física do Gerador Síncrono . . . 14
3.2 Descrição Matemática do Gerador Síncrono . . . 14
3.2.1 Equações do Estator . . . 15
3.2.2 Equações do Rotor . . . 17
3.3 Transformada de Park . . . . 19
3.4 Aplicação da Transformada de Park no Modelo do Gerador Síncrono . . . 20
3.5 Modelo Linearizado de Heffron-Phillips . . . 21
3.6 Síntese do Capítulo . . . 27
4 Sistema de Excitação do Gerador Síncrono 28
4.1 Estrutura Geral de um Sistema de Excitação . . . 28
4.2 Tipos de Sistemas de Excitação . . . 29
4.3 Regulador Automático de Tensão (AVR) . . . 30
4.4 Estabilizador de Sistema de Potência (PSS) . . . 31
4.4.1 Filtro Washout . . . . 32
4.4.2 Compensador Dinâmico . . . 32
4.4.3 Filtro Torsional . . . 33
4.4.4 Limitador . . . 34
4.5 Síntese do Capítulo . . . 34
5 Fundamentos da Transformada Wavelet 35 5.1 Transformada Wavelet Discreta - TWD . . . . 35
5.1.1 Filtros Wavelet e Escala da TWD . . . 40
5.2 Transformada Wavelet Discreta Redundante - TWDR . . . . 41
5.2.1 Filtros Wavelet e Escala da TWDR . . . . 43
5.3 Energia dos Coeficientes de Aproximação e Wavelet . . . . 45
5.4 Algoritmo Recursivo para Cálculo dos Coeficientes de Aproximação e Wavelet . . . . 45
5.5 Algoritmo Recursivo para Cálculo das Energias dos Coeficientes de Apro-ximação e Wavelet . . . 47
5.6 Síntese do Capítulo . . . 47
6 Método Proposto 49 6.1 PSS Baseado na Transformada Wavelet - (WPSS) . . . . 49
6.2 Extração de Oscilações Eletromecânicas . . . 50
6.2.1 Energia dos Coeficientes de Aproximação . . . 51
6.2.2 Extração da Componente CC . . . 53
6.3 Detector de Eventos . . . 54
6.3.1 Energia dos Coeficientes Wavelet . . . 54
6.3.2 Sinal de Gatilho . . . 56
6.4 Controlador . . . 57
6.5 Síntese do Capítulo . . . 57
7 Resultados experimentais 58 7.1 Descrição do SEP Implementado . . . 58
7.2.1 Escolha da Wavelet Mãe . . . . 59
7.2.2 Estudo Comparativo entre TWD e TWDR . . . 63
7.3 Detecção de Oscilações Elétricas e Eletromecânicas . . . 67
7.3.1 Detecção de Oscilações Elétricas . . . 67
7.3.2 Detecção de Oscilações Eletromecânicas . . . 68
7.4 Compensação de Oscilações Eletromecânicas em SEPs . . . 70
7.4.1 Curto-Circuito Trifásico . . . 71
7.4.2 Curto-Circuito Bifásico . . . 72
7.4.3 Curto-Circuito Monofásico . . . 74
8 Conclusões 76 8.1 Conclusões Gerais . . . 76
8.2 Trabalhos Futuros . . . 76
Referências bibliográficas 78 A Ensaios Laboratoriais 84 A.1 Equipamentos Utilizados . . . 84
A.2 Ensaio de circuito aberto . . . 85
A.3 Curva do entreferro . . . 86
A.4 Ensaio de curto-circuito . . . 86
A.5 Ensaio de escorregamento para determinação de Xde Xq . . . 87
A.6 Ensaio de Curto-Circuito Trifásico . . . 90
A.7 Filtros Wavelet e Escala . . . . 91
B SEP Implementado 95 B.1 Protótipo de SEP . . . 95
B.2 Descrição da Plataforma Experimental . . . 98
Lista de Figuras
1.1 Matriz energética brasileira em 2013. . . 2
3.1 Representação básica de uma máquina síncrona: (a) Rotor; (b) Estator. . . 15
3.2 Diagrama da transformada de Park. . . . 19
3.3 Máquina síncrona conectada ao barramento. . . 22
4.1 Sistema de excitação de um gerador síncrono. . . 28
4.2 Estrutura clássica de um AVR conectado ao gerador. . . 30
4.3 Estrutura de um PSS convencional. . . 32
5.1 Diagrama de blocos do primeiro estágio da TWD. . . 36
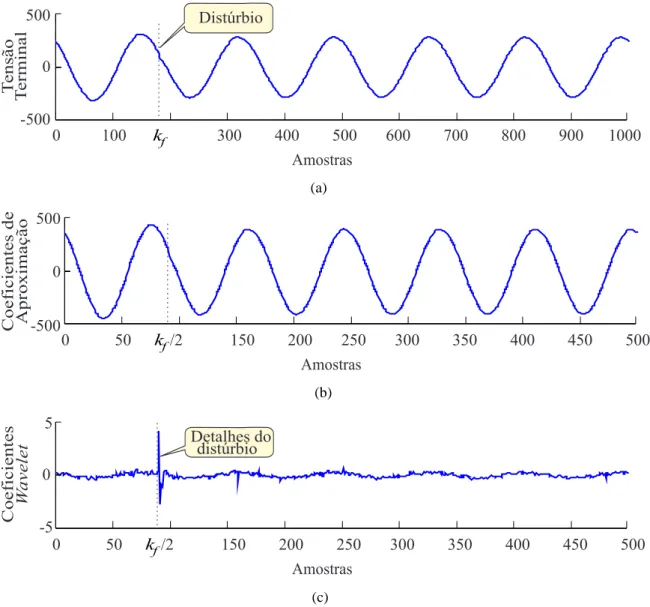
5.2 Decomposição de um sinal na primeira escala da TWD: (a) tensão termi-nal; (b) coeficientes de aproximação; (c) coeficientes wavelet. . . . 37
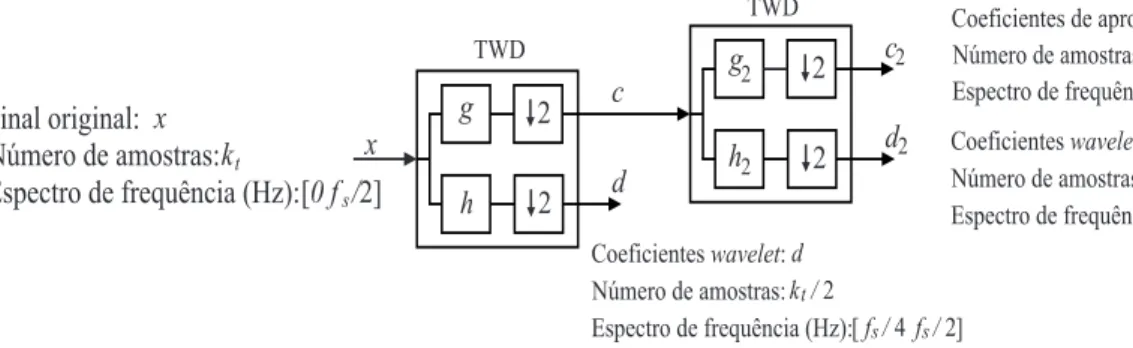
5.3 Decomposição do sinal em dois estágios da TWD. . . 38
5.4 Decomposição de um sinal na segunda escala da TWD: (a) tensão termi-nal; (b) coeficientes de aproximação da segunda escala; (c) coeficientes wavelet da segunda escala. . . . 39
5.5 Diagrama de blocos da TWDR. . . 42
5.6 Decomposição de um sinal na primeira escala da TWDR: (a) tensão ter-minal; (b) coeficientes de aproximação; (c) coeficientes wavelet. . . . 43
6.1 Diagrama de blocos de controle do sistema de excitação do gerador sín-crono. . . 49
6.2 PSS baseado na transformada wavelet. . . . 50
6.3 Extração da variação da potência ativa. . . 51
6.4 Cálculo em tempo real da energia dos coeficientes de aproximação. . . 51
6.5 Cálculo da energia dos coeficientes de aproximação: (a) potência ativa; (b) energia dos coeficientes de aproximação. . . 52
6.6 Sinal equivalente a variação de potência ativa. . . 53
6.7 Detector de eventos. . . 54
6.8 Cálculo em tempo real da energia dos coeficientes wavelet. . . . 54
6.9 Cálculo da energia dos coeficientes wavelet: (a) potência ativa; (b) energia
dos coeficientes wavelet. . . . 55
6.10 Sinal de gatilho do WPSS . . . 56
7.1 Protótipo do SEP implementado experimentalmente. . . 58
7.2 Tensão terminal com transitório. . . 60
7.3 Coeficientes wavelets normalizados: (a) db(4); (b) Haar. . . . 60
7.4 Coeficientes wavelet normalizados da Haar. . . . 61
7.5 Coeficientes wavelets normalizados: (a) db(6); (b) coif(6). . . . 61
7.6 Coeficientes wavelets normalizados: (a) db(12); (b) coif(12). . . . 62
7.7 Tensão terminal com transitório. . . 63
7.8 Coeficientes wavelets normalizados: (a) coeficientes wavelet da TWD ; (b) coeficientes wavelet da TWDR. . . . 64
7.9 Tensão terminal com transitório. . . 64
7.10 Coeficientes wavelets normalizados: (a) coeficientes wavelet da TWD ; (b) coeficientes wavelet da TWDR. . . . 65
7.11 Tensão terminal com transitório. . . 65
7.12 Coeficientes wavelets normalizados: (a) coeficientes wavelet da TWD ; (b) coeficientes wavelet da TWDR. . . . 66
7.13 Análise estatística. . . 66
7.14 Potência ativa. . . 67
7.15 Energia dos coeficientes wavelet. . . . 68
7.16 Potência ativa e energia dos coeficientes de aproximação normalizada. . . 69
7.17 Energia dos coeficientes de aproximação das wavelets db(4), Haar e db(90). 69 7.18 Critérios dos índices de overshoots. . . . 70
7.19 Potência ativa durante falta trifásica: (a) sem PSS; (b) PSS convencional; (c) com o WPSS. . . 72
7.20 Potência ativa durante falta bifásica: (a) sem PSS; (b) PSS convencional; (c) com o WPSS. . . 73
7.21 Potência ativa durante falta monofásica: (a) sem PSS; (b) PSS convenci-onal; (c) com o WPSS. . . 75
A.1 Esquema de ligação da plataforma experimental . . . 85
A.2 Resultado dos ensaios . . . 87
A.3 Esquema de ligação para o ensaio de escorregamento. . . 88
A.5 Esquema de curto-circuito trifásico. . . 90
A.6 Corrente de armadura durante curto-circuito. . . 91
B.1 Emulador de sistema de potência com simulador de distúrbios. . . 96
B.2 Conjunto gerador síncrono e máquina de corrente continua. . . 97
Lista de Tabelas
1.1 Publicações dos resultados da dissertação e de seu desdobramento. . . 5
2.1 Resumo da revisão bibliográfica referente aos dispositivos PSSs. . . 12
2.2 Resumo da revisão bibliográfica referente à detecção de distúrbios. . . 13
7.1 Parâmetros utilizados na detecção de transitórios. . . 59
7.2 Wavelets mãe. . . . 62
7.3 Parâmetros utilizados nos ensaios de compensação. . . 70
7.4 Avaliação de desempenho para o curto-circuito trifásico. . . 71
7.5 Avaliação de desempenho para o curto-circuito bifásico. . . 73
7.6 Avaliação de desempenho para o curto-circuito monofásico. . . 74
A.1 Parâmetros da máquina de corrente contínua. . . 84
A.2 Parâmetros da máquina de síncrona de polos salientes. . . 85
A.3 Parâmetros ensaio de escorregamento. . . 89
A.4 Reatâncias e indutância dos eixos d e q. . . . 89
A.5 Indutâncias de magnetização dos eixos d e q. . . . 90
A.6 Parâmetros ensaio de curto-circuito trifásico. . . 91
A.7 Filtros wavelet e escala para db4 (TWD). . . . 92
A.8 Filtros wavelet e escala para db4 (TWDR). . . . 92
A.9 Filtros wavelet e escala para db6 (TWDR). . . . 92
A.10 Filtros wavelet e escala para db12 (TWDR). . . . 93
A.11 Filtros wavelet e escala para Haar. . . . 93
A.12 Filtros wavelet e escala para coif6. . . . 93
A.13 Filtros wavelet e escala para coif12. . . . 94
B.1 Parâmetros da linha, carga linear e simulador de distúrbios. . . 97
Lista de Símbolos
ce, cm Conjugado elétrico e conjugado mecânico
δ Ângulo entre o eixo q e o vetor tensão do barramento ea, ebe ec Tensão de fase do gerador síncrono
ed, eq Tensão de eixo direto e em quadratura do gerador, respectivamente ef d Tensão de campo do gerador
es Tensão terminal do gerador e∞ Tensão do barramento infinito
id, iq Corrente de eixo direto e em quadratura do gerador, respectivamente if d Corrente de campo do gerador
K1···, K6 Coeficientes do modelo de Heffron e Philips
Ls, Lr Indutância própria entre bobinas do estator e entre bobinas do rotor, respectivamente
laa0, lbb0e lcc0 Componente CC laa2, lbb2e lcc2 Valor de pico
λd,λq Fluxo de eixo direto e em quadratura respectivamente
λs,λr Fluxos do estator e rotor, respectivamente
λf d Fluxo de campo
Ms, Mr Indutância mútua entre duas bobinas do estator e entre duas bobinas do rotor, respectivamente
Mrs, Msr Indutância mútua entre bobinas do estator e do rotor, respectivamente
M Constante de inércia do gerador
P, P−1 Transformadas de Park Rf d Resistências do campo
rs, xs Resistência e reatância entre o gerador e o barramento infinito, respec-tivamente
τ′
d0 Constante de tempo de eixo direto em circuito aberto do gerador
xe Reatância do barramento infinito
xd, xq Reatância síncrona de eixo direto e em quadratura do gerador, respecti-vamente
x′d Reatância transitória de eixo direto do gerador
ωr Velocidade nominal do gerador
Tz Constante de tempo
Ks Ganho do controlador avança atraso
T1,T2,T3,T4 Constantes de tempo do controlador avança atraso
c1 Coeficientes de aproximação do primeiro estágio
d1 Coeficientes wavelet do primeiro estágio
c2 Coeficientes de aproximação do segundo estágio
d2 Coeficientes wavelet do segundo estágio
cj Coeficientes de aproximação da escala j dj Coeficientes wavelet da escala j
fs Taxa de amostragem
g Coeficientes do filtro escala da transformada wavelet discreta
e
g Coeficientes do filtro escala da transformada wavelet discreta redun-dante
h Coeficientes do filtro wavelet da transformada wavelet discreta
e
h Coeficientes do filtro wavelet da transformada wavelet discreta redun-dante
kt Número de amostras de um sinal
L Número de amostras dos filtros escala e wavelet .
ε Energia dos coeficientes wavelet ..
Lista de Abreviaturas e Siglas
ANEEL Agência Nacional de Energia Elétrica
AVR Automatic Voltage Regulator
CA Corrente Alternada
CC Corrente Contínua
DSP Digital Signal Processing
IEEE Institute of Electrical and Electronic Engineers
LEPER Laboratório de Eletrônica de Potência e Energias Renováveis
MRAC Model Reference Adaptive Controller
PI Controlador Proporcional Integral
PID Controlador Proporcional Integral Derivativo
PSS Power System Stabilizer
QEE Qualidade da Energia Elétrica RNAs Redes Neurais Artificiais
SAC Simple Adaptive Control
SEPs Sistemas Elétricos de Potência TWC Transformada Wavelet Contínua TWD Transformada Wavelet Discreta
TWDR Transformada Wavelet Discreta Redundante
WPSS Power System Stabilizer Based on Wavelet Transform
Capítulo 1
Introdução
Sistemas elétricos de potência (SEPs) possuem como principais objetivos gerar e for-necer energia elétrica a consumidores industriais, urbanos e rurais, levando-se em consi-deração princípios básicos como segurança e confiabilidade. A segurança está associada a manutenção de níveis adequados de tensão e frequência, características fundamentais no funcionamento ótimo dos equipamentos elétricos, enquanto que a confiabilidade consiste na garantia de entrega de energia elétrica ao consumidor com o menor número de inter-rupções possível, mesmo diante de condições adversas, tais como faltas, afundamentos de tensão, variações rápidas de carga e distúrbios transitórios (KUNDUR, 1994). Basica-mente, os SEPs são constituídos pelos subsistemas de geração, transmissão e distribuição da energia elétrica:
• o subsistema de geração corresponde ao processo de produção de energia elétrica por meio de diversas fontes primárias, tais como fontes térmicas, hidráulicas e eó-lica. No Brasil, a energia elétrica é produzida, em sua maioria, por meio de gerado-res síncronos acionados pela energia cinética das águas;
• o subsistema de transmissão está relacionado a transferência de energia elétrica de unidades geradoras aos subsistemas de distribuição por meio de linhas de transmis-são em médias e longas distâncias;
• o subsistema de distribuição está associado a transferência de potência do ponto de chegada da transmissão até cada consumidor.
CAPÍTULO 1. INTRODUÇÃO 2
92% de toda a energia elétrica produzida no Brasil é proveniente de usinas hidrelétricas e termoelétricas, que utilizam geradores síncronos na produção de energia elétrica.
65,24%
10,18% 6,31% 7,82% 5,66% 1,55% 1,78% 1,46%
Eólica
Carvão Mineral Nuclear Petróleo Nuclear Importação Gás Hidro
Figura 1.1: Matriz energética brasileira em 2013.
Os geradores síncronos são classificados de acordo com o seu aspecto construtivo em geradores síncronos de polos salientes e de polos lisos, respectivamente. Geradores síncronos de polos salientes são acionados mecanicamente por turbinas hidráulicas, que apresentam como principal característica um elevado número de polos e, consequente-mente, operação em baixas rotações, geralmente menores do que 900 rpm e com oito polos. Por outro lado, geradores síncronos de polos lisos são acionados mecanicamente por turbinas a vapor, que operam em alta rotação, geralmente com velocidade angular de 1800 rpm e 3600 rpm para um total de quatro e dois polos, respectivamente.
CAPÍTULO 1. INTRODUÇÃO 3
O amortecimento adequado das oscilações eletromecânicas, de baixa frequência, é de vital importância para a operação segura do sistema elétrico, aumentando as margens de estabilidade dos SEPs, e vem sendo objeto de estudo há várias décadas, desde o período em que os SEPs passaram a operar em paralelo (DEMELLO; CONCORDIA, 1969). Quando
mal amortecidas, oscilações eletromecânicas podem provocar desgastes mecânicos em geradores síncronos, restrições na capacidade de transferência de potência em linhas de transmissão e, em casos extremos, podem provocar a interrupção no fornecimento de energia elétrica e, consequentemente, a perda de sincronismo dos geradores (KUIAVA; RAMOS; BRETAS, 2007).
A extração e compensação das oscilações eletromecânicas de baixa frequência con-sistem em reais desafios na manutenção de geradores síncronos conectados em um bar-ramento infinito e, consequentemente, na estabilidade de SEPs. Inicialmente, a compen-sação de oscilações eletromecânicas foram realizadas com enrolamentos amortecedores dos geradores síncronos. No entanto, o crescente consumo e a elevada sofisticação com-prometeram a estabilidade dos SEPs, uma vez que passaram a trabalhar próximo dos limites operacionais (PADIYAR, 2008). Com o objetivo de aumentar o amortecimento de oscilações eletromecânicas e, consequentemente, as margens de estabilidades dos SEPs, os estabilizadores de sistemas de potência (do inglês, Power System Stabilizer-PSS) fo-ram adicionados na malha de controle de reguladores automáticos de tensão (do inglês,
Automatic Voltage Regulator-AVR) (DEMELLO; CONCORDIA, 1969).
Os AVRs são utilizados no controle do sistema de excitação de geradores síncronos, tendo por função principal regular as tensões terminais fornecidas pelos geradores sín-cronos, mantendo-as dentro de níveis pré-estabelecidos. No entanto, AVRs normalmente operam com constantes de tempo pequenas e altos ganhos que, aliados às condições de grandes potências transferidas a longas distâncias, comprometem ainda mais a questão da estabilidade às pequenas perturbações (PADIYAR, 2008). Para superar essa problemática, sinais estabilizantes adicionais provenientes de dispositivos PSSs vêm sendo introduzi-dos na malha de controle do sistema de excitação para fornecer torque de amortecimento (BA-MUQABEL; ABIDO, 2006).
CAPÍTULO 1. INTRODUÇÃO 4
No dispositivo PSS convencional, a extração de oscilações eletromecânicas em SEPs é realizada com processos de filtragens convencionais baseados no filtro washout (PADIYAR, 2008). No entanto, processos de extração baseados no filtro washout caracterizam-se por apresentarem atrasos de resposta, atenuações do sinal e inserção de ruídos de alta frequência no sinal de resposta. Este conjunto de fatores deteriora o desempenho dos dispositivos PSSs. Desta forma, a utilização de uma ferramenta que utilize processos de filtragem que apresente respostas rápidas e precisas se faz necessária na extração de sinais estabilizantes usados nos dispositivos PSSs.
Estudos propostos recentemente na literatura apontam a transformada wavelet como uma poderosa ferramenta matemática empregada na análise de distúrbios transitórios de alta frequência (COSTA; SOUZA; BRITO, 2012a). Uma vez que às oscilações eletrome-cânicas, principalmente as ocasionadas por faltas, são precedidas por oscilações eletro-magnéticas ou transitórios, a transformada wavelet pode ser aplicada para o gatilho dos dispositivos PSSs. Por outro lado, os coeficientes de aproximação podem ser utilizados para extração de componentes de baixa frequência (COSTA; DRIESEN, 2013), podendo ser utilizados por dispositivos PSSs no processo de geração dos sinais estabilizantes.
1.1
Motivação
Além da necessidade real de busca de novos métodos de extração e compensação de oscilações eletromecânicas, de baixa frequência, em SEPs, outros fatores motivaram a escolha do tema proposto:
• O tema proposto se enquadra em uma linha de pesquisa de acionamentos e proteção de máquinas, que vem sendo desenvolvida desde 2005 pelo LEPER/UFRN, estando vinculada aos seguintes projetos de pesquisa:
– Aprimoramento de Aerogerador de 2 MW para Adequação às Condições
Eó-licas Brasileiras. Projeto em andamento, financiado pela PETROBRAS.
– Implementação de um PSS Utilizando Técnicas de Controle Adaptativo,
fi-nanciado pelo CNPq (Conselho Nacional de Desenvolvimento Cientifico e Tecnológico).
1.2
Objetivos
CAPÍTULO 1. INTRODUÇÃO 5
Os objetivos específicos são:
• obtenção de um novo método de extração de oscilações eletromecânicas, de baixa frequência, com uso das energias dos coeficientes de aproximação da TWDR;
• obtenção de um novo método de detecção de oscilações elétricas com uso das ener-gias dos coeficientes wavelet da TWDR;
• implementação de um protótipo de PSS baseado na transformada wavelet em DSP;
• montagem de um sistema elétrico reduzido em laboratório para realização de en-saios experimentais;
• comparar a transformada wavelet discreta (TWD) com a transformada wavelet dis-creta redundante (TWDR);
• analisar os efeitos das wavelets mães;
• comparação de desempenho do dispositivo PSS proposto com um PSS convencio-nal.
1.3
Contribuições
As principais contribuições são:
• obtenção de um novo método de extração de oscilações eletromecânicas, de baixa frequência, com uso dos coeficientes de aproximação da TWDR;
• proposição de um novo dispositivo PSS baseado na transformada wavelet;
Com relação às publicações dos resultados da dissertação e de seu desdobramento, apresentam-se na Tabela 1.1 as publicações em anais de congressos.
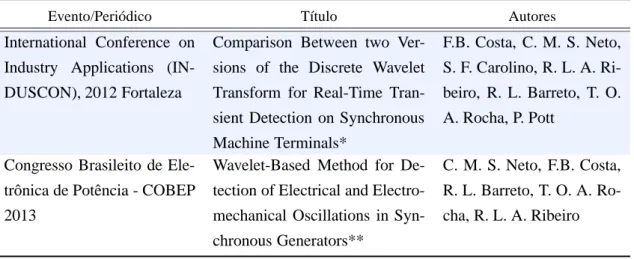
Tabela 1.1: Publicações dos resultados da dissertação e de seu desdobramento.
Evento/Periódico Título Autores
International Conference on
Industry Applications
(IN-DUSCON), 2012 Fortaleza
Comparison Between two
Ver-sions of the Discrete Wavelet
Transform for Real-Time
Tran-sient Detection on Synchronous
Machine Terminals*
F.B. Costa, C. M. S. Neto,
S. F. Carolino, R. L. A.
Ri-beiro, R. L. Barreto, T. O.
A. Rocha, P. Pott
Congresso Brasileito de
Ele-trônica de Potência - COBEP
2013
Wavelet-Based Method for
De-tection of Electrical and
Electro-mechanical Oscillations in
Syn-chronous Generators**
C. M. S. Neto, F.B. Costa,
R. L. Barreto, T. O. A.
Ro-cha, R. L. A. Ribeiro
CAPÍTULO 1. INTRODUÇÃO 6
1.4
Organização do Trabalho
Esta dissertação está organizada em sete capítulos e dois apêndices:
• Capítulo 1: Apresenta-se uma introdução e a contextualização referente a proble-mática das oscilações eletromecânicas em SEPs;
• Capítulo 2: Apresenta-se o estado da arte referente às principais técnicas de con-trole utilizadas nos AVRs e a utilização da transformada wavelet na detecção de faltas em SEPs.
• Capítulo 3: Apresenta-se uma descrição matemática do gerador síncrono de polos salientes. Além disso, também é apresentado o modelo linear de Heffron e Phillips, largamente utilizado em análises de estabilidade em SEPs. Também é apresentada a função de transferência utilizada para implementação do AVR.
• Capítulo 4: Apresenta-se o sistema de excitação do gerador síncrono, os regu-ladores de tensão e os PSSs, mostrando-se as principais características dos PSSs convencionais.
• Capítulo 5: Apresenta-se a fundamentação teórica da transformada wavelet enfa-tizando as principais características das versões discretas TWD e TWDR.
• Capítulo 6: Apresenta-se uma descrição do método proposto nesta dissertação, enfatizando as energias dos coeficientes wavelet e de aproximação aplicadas na detecção de distúrbios elétricos e oscilações eletromecânicas, respectivamente.
• Capítulo 7: Apresentam-se os resultados experimentais da estrutura proposta neste trabalho para compensação de oscilações eletromecânicas em um protótipo de SEP.
• Apêndice A: Apresentam-se os ensaios laboratoriais realizados para a obtenção dos parâmetros da máquina síncrona de polos salientes e os parâmetros utilizados na implementação dos filtros wavelet e escala;
Capítulo 2
Estado da Arte
Apresenta-se neste capítulo um levantamento do estado da arte dos dispositivos PSSs, dando-se ênfase aos métodos convencionais e não-convencionais empregados na compen-sação de oscilações eletromecânicas e os diversos controladores utilizados. Além disso apresenta-se o estado da arte da transformada wavelet aplicada na análise de distúrbios em SEPs.
2.1
Estruturas Convencionais de PSSs
Os primeiros estudos referentes à compensação de oscilações eletromecânicas em SEPs foram realizados por Demello e Concordia (1969) ao introduzirem os conceitos básicos para o projeto de dispositivos PSSs. Desde então, dispositivos PSSs operando em conjunto com AVRs, aplicados em subsistemas de geração de energia, são imple-mentados e projetados por intermédio de técnicas convencionais e controladores lineares clássicos (MACHOWSKI et al., 2000), tais como PID (Proporcional Integral e Derivativo) (BA-MUQABEL; ABIDO, 2006) e Avanço-Atraso (KIM; SCHAEFER, 2004). Os controlado-res avanço-atraso (lead-lag) e PID são os mais utilizados por apcontrolado-resentarem uma simples estrutura e de fácil implementação (DEMELLO; CONCORDIA, 1969).
CAPÍTULO 2. ESTADO DA ARTE 8
Dispositivos PSSs operam utilizando como sinais de entrada a variação de velocidade (∆ω), variação de potência elétrica (∆p) e a variação do ângulo de potência (∆δ). Larsen e Swann (1981) demonstraram que quando o PSS opera com à variação de velocidade ou variação de potência elétrica como sinal de entrada, o ajuste deve ser realizado para a condição de carga pesada, uma vez que o desempenho é deteriorado quando o sistema AC enfraquece. Por outro lado, se o sinal de entrada for a variação do ângulo de potência, o ajuste pode ser feito na condição de carga leve, já que este sinal é menos sensível aos modos de oscilação locais e mais sensível aos modos de oscilação entre áreas.
2.2
Estruturas Não-Convencionais de PSSs
Devido ao comportamento não-linear e, consequentemente, as limitações presentes nos controladores convencionais que utilizam estruturas com parâmetros fixos (Lü QI-ANG, 2011), trabalhos baseados em técnicas de controle não convencionais, tais como técnicas de controle adaptativas, lógica fuzzy e redes neurais artificiais (RNAS) aplicadas na compensação de oscilações de baixa frequência em SEPs vêm sendo propostas nos últimos anos para reduzir a falta de adaptabilidade presente nos PSSs convencionais. No entanto, apesar de apresentarem bons resultados, a lógica fuzzy e as RNAs não garantem estabilidade em malha fechada. Além disso, técnicas não convencionais exigem uma alta carga computacional e elevada complexidade de implementação. Esse conjunto de fatores limita a aplicação de estruturas não convencionais em estudos experimentais.
CAPÍTULO 2. ESTADO DA ARTE 9
PSS (WANG, 2013), sua implementação em aplicações práticas é restrita devido a alta carga computacional necessária na identificação dos parâmetros e na resolução da equação de Ricatti.
Com o objetivo de reduzir a elevada complexidade de implementação e a alta carga computacional das estruturas adaptativas, Ritonja et al. (2009) propuseram um PSS adap-tativo baseado no controle adapadap-tativo simples (do inglês, Simple Adaptive Control-SAC). O SAC representa uma versão simplificada do controle adaptativo por modelo de refe-rência (do inglês, Model Reference Adaptive Controller-MRAC ) que, se comparado com outras estruturas adaptativas, possui um mecanismo de adaptação bem mais simples.
A lógica fuzzy apresenta-se como uma importante ferramenta de controle largamente empregada em diversos estudos aplicados na análise de sistemas elétricos, como por exemplo, análise de qualidade de energia, controle de potência ativa e reativa, diagnós-ticos de faltas, análise de estabilidade, controle de estabilização e proteção de sistemas elétricos (BANSAL, 2003). A principal vantagem da lógica fuzzy em relação a outras estra-tégias de controle é a não necessidade de um modelo matemático (HIYAMA; UEKI; ANDOU, 1997), (SRIKANTH; KUMAR, 2001). Normalmente, estudos com lógica fuzzy utilizam a va-riação de velocidade como sinal de entrada do PSS e utilizam-se de um sistema composto por um gerador síncrono conectado em um barramento infinito na verificação de seu de-sempenho (GHOLIPOUR; LESANI; ZADEH, 2009), (RENUKA; MANAKKAL, 2012). Com o objetivo de aumentar a margem de estabilidade, Sumina et al. (2006) propuseram um PSS utilizando lógica fuzzy aplicado em um sistema multi-máquinas em conjunto com a estimação do ângulo de carga por meio dos parâmetros de tensão e corrente terminal de um gerador síncrono.
CAPÍTULO 2. ESTADO DA ARTE 10
al., 1993), (PARK; CHOI; LEE, 1996).
Estruturas híbridas, compostas por duas ou mais técnicas, apresentam-se como inte-ressantes soluções na compensação de oscilações de baixa frequência em SEPs (HASSAN; MOGHAVVEMI; MOHAMED, 2009). Mitra et al. (2008) propuseram a utilização das RNAs
em conjunto com a lógica fuzzy, no qual é feita uma análise de desempenho com a estru-tura convencional aplicada em um gerador síncrono conectado em um barramento infinito. Othman et al. (2004) propuseram uma estrutura utilizando RNAs em conjunto com a transformada wavelet, nos quais as RNAs são empregadas no ajuste dos parâmetros do PSS e na classificação de distúrbios transitórios de falta. Por outro lado, a energia dos coeficientes wavelet é utilizada na detecção de variações de velocidade de gerado-res síncronos em um sistema multi-máquina. No entanto, diferentemente dos esquemas convencionais, estruturas híbridas necessitam de uma alta carga computacional em sua implementação, o que pode inviabilizar sua utilização em aplicações experimentais.
Em geral, a transformada wavelet é empregada na análise de distúrbios transitórios de alta frequência com dados de tensão e/ou corrente (COSTA, 2010). No entanto, é possível analisar e extrair informações de baixa frequência com as energias dos coeficientes de aproximação (COSTA; DRIESEN, 2013). Rueda et al. (2011) propuseram a utilização da transformada wavelet para identificação dos parâmetros de oscilações eletromecânicas, de baixa frequência, em SEPs baseado no algoritmo modificado de Morlet.
2.3
Detecção de Distúrbios Transitórios
Em SEPs, a transformada wavelet é bastante aplicada em estudos de qualidade da energia elétrica (QEE) e proteção de sistemas elétricos, principalmente em sistemas de transmissão e distribuição (ROSA; HORACIO, 2002). Em relação à análise de distúrbios de QEE, Gaouda et al. (2002) apresentaram exemplos que utilizam a TWD para detecção e localização dos instantes inicial e final de distúrbios transitórios, realizados por meio dos coeficientes wavelet da primeira escala. Além disso, Gaouda et al. (2002) demons-traram que é possível detectar e classificar afundamentos de tensão, elevações de tensão e distorções harmônicas fazendo uso da energia concentrada dos coeficientes wavelet.
CAPÍTULO 2. ESTADO DA ARTE 11
dos coeficientes wavelet, da primeira escala, das tensões e correntes para detecção e clas-sificação de distúrbios de QEE e de distúrbios de faltas, cuja metodologia se estende para aplicações em tempo real.
Em geral, a detecção e classificação de faltas em sistemas de transmissão, baseadas na transformada wavelet, são realizadas com base na análise dos sinais de corrente e tensão (YOUSSEF, 2001). A utilização dos coeficientes wavelet, da primeira escala, da TWD, das correntes na classificação de faltas são realizados através de esquemas de janelamento de dados amostrados (YOUSSEF, 2001). A utilização da energia espectral dos dados de tensão dos coeficientes wavelet na classificação de faltas apresenta-se como uma interessante solução, uma vez que, em condições normais de funcionamento, a energia espectral é zero, mas aumenta significativamente quando ocorre uma falha (AGUILERA; ORDUNA; RATTA, 2006), (COSTA; SOUZA; BRITO, 2012b).
Estruturas híbridas compostas por duas ou mais técnicas apresentam-se como uma interessante solução na detecção e classificação de falta em linhas de transmissão. Silva et al. (2006) propuseram a utilização das RNAs em conjunto com a TWD. As energias janeladas dos coeficientes wavelet das correntes são utilizadas na detecção dos distúrbios, enquanto que as RNAs são utilizadas para efetuar a classificação das faltas. No entanto, estruturas híbridas necessitam de uma alta carga computacional em sua implementação, o que pode inviabilizar sua utilização em aplicações experimentais.
A necessidade crescente de melhorar a QEE faz com que os sistemas de distribuição necessitem de uma operação segura e confiável continuamente (SALIM et al., 2008). Estu-dos aplicaEstu-dos na proteção de sistemas de distribuição concentram-se, principalmente na identificação de distúrbios transitórios para detecção de faltas no estator e rotor de gera-dores síncronos e em transformagera-dores de potência. Ozgonenel et al. (2006) propuseram um algoritmo aplicado na proteção de dois geradores síncronos. O método consiste na correlação dos coeficientes wavelet da TWD dos sinais de corrente e tensão para identifi-car e classifiidentifi-car faltas internas ou externas. Distúrbios transitórios em transformadores de potência baseados na transformada wavelet contínua (TWC) são analisados por meio do monitoramento de descontinuidades nos sinais de corrente do primário do transformador durante período de falta interna (OZGONENEL, 2006).
po-CAPÍTULO 2. ESTADO DA ARTE 12
los salientes com base nas tensões terminais, mostrando que as wavelets constituem em uma poderosa ferramenta para detecção de distúrbios.
2.4
Resumo da Revisão Bibliográfica
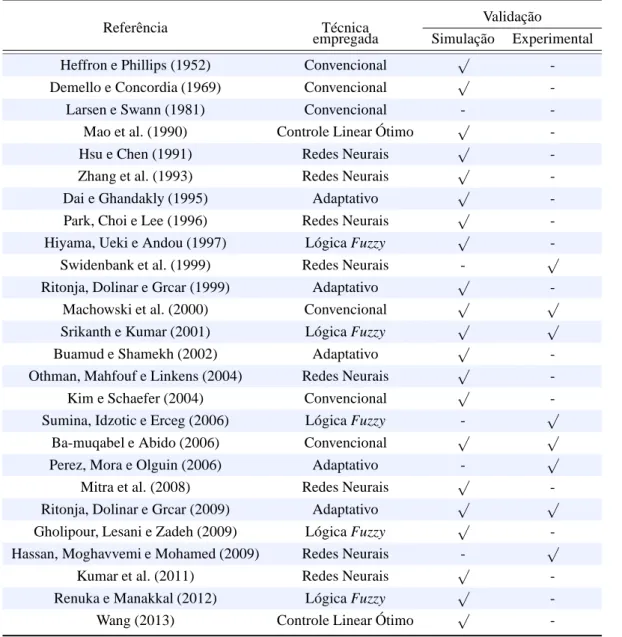
Na Tabela 2.1 é apresentado um quadro resumo, em ordem cronológica, das principais publicações referentes aos métodos de controle utilizados na compensação de oscilações eletromecânicas em SEPs, destacando-se também a forma de validação de cada trabalho, se por estudo de simulação ou de maneira experimental.
Tabela 2.1: Resumo da revisão bibliográfica referente aos dispositivos PSSs.
Referência Técnica Validação
empregada Simulação Experimental Heffron e Phillips (1952) Convencional √ -Demello e Concordia (1969) Convencional √ -Larsen e Swann (1981) Convencional - -Mao et al. (1990) Controle Linear Ótimo √ -Hsu e Chen (1991) Redes Neurais √ -Zhang et al. (1993) Redes Neurais √ -Dai e Ghandakly (1995) Adaptativo √ -Park, Choi e Lee (1996) Redes Neurais √ -Hiyama, Ueki e Andou (1997) Lógica Fuzzy √ -Swidenbank et al. (1999) Redes Neurais - √ Ritonja, Dolinar e Grcar (1999) Adaptativo √
-Machowski et al. (2000) Convencional √ √ Srikanth e Kumar (2001) Lógica Fuzzy √ √ Buamud e Shamekh (2002) Adaptativo √ -Othman, Mahfouf e Linkens (2004) Redes Neurais √ -Kim e Schaefer (2004) Convencional √ -Sumina, Idzotic e Erceg (2006) Lógica Fuzzy - √
Ba-muqabel e Abido (2006) Convencional √ √ Perez, Mora e Olguin (2006) Adaptativo - √ Mitra et al. (2008) Redes Neurais √ -Ritonja, Dolinar e Grcar (2009) Adaptativo √ √ Gholipour, Lesani e Zadeh (2009) Lógica Fuzzy √ -Hassan, Moghavvemi e Mohamed (2009) Redes Neurais - √
-CAPÍTULO 2. ESTADO DA ARTE 13
Na Tabela 2.2 é apresentado um resumo, em ordem cronológica, do estado da arte da transformada wavelet, destacando-se à análise de distúrbios de QEE e diagnóstico de faltas em SEPs. Além disso, são enfatizados os objetivos (detecção e classificação), técnicas empregadas, sinais avaliados (corrente e/ou tensão) e a forma de validação, se por estudo de simulação e/ou experimental.
Tabela 2.2: Resumo da revisão bibliográfica referente à detecção de distúrbios.
-Capítulo 3
Gerador Síncrono
Neste capítulo será mostrado o modelo matemático de um gerador síncrono, para um sistema de potência composto por um gerador síncrono ligado a um barramento infinito. O modelo a ser tratado é o modelo linear de Heffron e Phillips (1952), largamente utilizado na literatura para o estudo da estabilidade a pequenas perturbações.
3.1
Descrição Física do Gerador Síncrono
Geradores síncronos são classificados de acordo com sua velocidade de acionamento, podendo ser de polos salientes ou de polos lisos. Geradores síncronos de pólos lisos são geralmente acionados por turbinas a vapor, possui número reduzido de pares de polos e operam em alta rotação (3000 rpm para frequência de 50 Hz e 3600 rpm para frequência de 60 Hz, respectivamente). Geradores síncronos de polos salientes são acionados por turbinas hidráulicas, possuem um número elevado de pares de polos e operam em baixa rotação, normalmente inferior a 900 rpm.
Na Figura 3.1 é apresentada a configuração básica de um gerador síncrono de polos salientes. que é constituído basicamente por dois enrolamentos: enrolamento de campo e enrolamento de armadura, situados no rotor e no estator, respectivamente. O rotor é composto por dois enrolamentos amortecedores e um enrolamento de campo alimentado por corrente contínua. Os enrolamentos do estator são trifásicos e defasados de 120o.
3.2
Descrição Matemática do Gerador Síncrono
CAPÍTULO 3. GERADOR SÍNCRONO 15
ikd ikq
efd ifd Eixo-q
Eixo-d
Eixo da fase a θ
(a)
a b
c ia ib
ic ec
ea eb
λb
λa
λc
(b)
Figura 3.1: Representação básica de uma máquina síncrona: (a) Rotor; (b) Estator.
• a força magnetomotriz (FMM) no entreferro deve ser distribuída de forma senoidal e os harmônicos deverão ser desprezados;
• a saliência deve ser limitada ao rotor e o efeito das ranhuras do estator é desprezado;
• a saturação magnética e a histerese devem ser ignoradas.
3.2.1
Equações do Estator
As equações das tensões terminais referentes a cada fase do estator são expressas da seguinte forma:
ea=
dλa
dt −Raia, (3.1)
eb=
dλb
dt −Rbib, (3.2)
ec=
dλc
dt −Rcic, (3.3)
em queλa, λb,λc representam os fluxos por fase do estator; Ra, Rb e Rc representam as resistências por fase do estator e ia, ibe ic correspondem às correntes por fase do estator.
Devido ao acoplamento magnético existente entre os enrolamentos de armadura e de campo, o fluxo de cada enrolamento é expresso em função da posição angular do rotor. As expressões dos fluxos estatóricos são expressas como segue (KUNDUR, 1994):
CAPÍTULO 3. GERADOR SÍNCRONO 16
λb=iaLab−ibLbb+icLbc+if dLa f d+ikdLakd−ikqLakq, (3.5)
λc=iaLca+ibLcb−icLcc+if dLa f d+ikdLakd−ikqLakq. (3.6)
em que if d representa a corrente do enrolamento de campo; ikd e ikq representam as correntes dos enrolamentos amortecedores; Laa, Lbb e Lcc representam as indutância próprias do estator das fases a, b e c, respectivamente; Lab, Lbc e Lca representam as indutância mútuas do estator, La f d representa a indutância do enrolamento de campo e Lkd e Lakqrepresentam as indutância dos enrolamentos amortecedores.
De uma forma geral, o vetor fluxo total referente a cada enrolamento do estator é dado pela soma dos fluxos próprios e mútuos do estator e o fluxo mútuo entre o rotor e o estator, como segue (KUNDUR, 1994):
λs=Lssis+Lsrir, (3.7)
em que, Lssrepresenta as indutâncias próprias referentes ao estator; Lsrrepresenta as indu-tâncias mútuas entre estator-rotor; is representa as correntes referentes aos enrolamentos do estator e ir representa as correntes referentes aos enrolamentos do rotor. Matricial-mente, tem-se (KUNDUR, 1994):
Lss=
Laa Lab Lac
Lba Lbb Lbc
Lca Lcb Lcc
, (3.8)
com as indutâncias proprias dadas por:
Laa=laa0+laa2cos2θ, (3.9)
Lbb=lbb0+lbb2cos2
θ−2π
3
, (3.10)
Lcc=lcc0+lcc2cos2
θ+2π 3
, (3.11)
e as indutâncias mútuas entre cada fase do estator são dadas por:
Lab=Lba=−lab0−lab2cos2
θ+π
3
, (3.12)
Lac=Lca=−lac0+lac2cos2
θ+2π 3
CAPÍTULO 3. GERADOR SÍNCRONO 17
Lbc=Lcb=lbc0−lbc2cos(2θ−π). (3.14) As indutâncias mútuas entre o estator e o rotor (Msr) são dadas por
Lsr =
La f dcosθ Lakdcosθ −Lakqsenθ Lb f dcos
θ−2π
3
Lbkdcos
θ−2π
3
−Lbkqsen
θ−2π
3
Lc f dcos
θ+2π 3
Lckdcos
2θ+2π 3
−Lckqsen
θ+2π 3 , (3.15)
em que, La f d, Lb f d e Lc f d representam as indutâncias mútuas entre as bobinas das fases a,
b e c do estator e a bobina do eixo d do rotor; Lakd, Lbkde Lckdrepresentam as indutâncias
mútuas entre as bobinas das fases a, b e c do estator e o enrolamento amortecedor do eixo d; Lakq, Lbkqe Lckqrepresentam as indutâncias mútuas entre as bobinas das fases a, b e c do estator e o enrolamento amortecedor do eixo q.
As correntes ise irsão dadas por:
is=
ia ib ic ,ir=
if d
ikd
ikq
(3.16)
3.2.2
Equações do Rotor
As equações dos enrolamentos do rotor são deduzidas considerando-se que os enro-lamentos amortecedores encontram-se curto-circuitados. Portanto, as tensões nos enrola-mentos amortecedores são zero e tem-se que:
ef d =
dλf d
dt +Rf dif d, (3.17)
dλkd
dt +Rkdikd=0, (3.18)
dλkq
dt +Rkqikq=0, (3.19)
CAPÍTULO 3. GERADOR SÍNCRONO 18
As equações de fluxo do rotor são dadas pelas seguintes expressões:
λf d =Lf dif d+Lf kdikd−La f d[iacosθ+ibcos(θ−2π/3) +iccos(θ+2π/3)], (3.20)
λkd =Lf kdii f d+Lkdikd−Lakd[iacos(θ−2π/3) +iccos(θ+2π/3)], (3.21)
λkq=Lkqikq+Lakq[iasenθ+ibsen(θ−2π/3) +icsen(θ+2π/3)]. (3.22) De uma forma geral, o vetor de fluxo total referente a cada enrolamento do rotor é dado pela soma dos fluxos próprios entre os enrolamentos do rotor e os fluxos mútuos entre os enrolamentos do rotor e estator. No entanto, nos enrolamentos do rotor não existem indutâncias mútuas, uma vez que os enrolamentos estão defasados em 90o. Desta forma, o vetor fluxo total do rotor é dado pelas seguintes relações:
λr=Lrrir−Lrsis, (3.23)
com
λr=
λf d
λkd
λkq
. (3.24)
As indutâncias próprias do rotor são dadas por
Lrr=
Lf d Lkq f d 0
Lf kd Lkd 0
0 0 Lkq
. (3.25)
As mútuas entre rotor e estator são dadas por
Lrs=
La f dcosθ La f dcos
θ−2π
2
La f dcos
θ+2π 3
Lakdcosθ Lakdcos
θ−2π
3
Lakdcos
θ+2π 3
−Lakqsenθ −Lakqsen
θ−2π
3
−Lakqsen
CAPÍTULO 3. GERADOR SÍNCRONO 19
3.3
Transformada de Park
A transformada de Park (dq0) é uma importante ferramenta matemática empregada no estudo de máquinas elétricas e consiste em uma transformação linear que simplifica as equações de fluxo, corrente e tensões, introduzindo um conjunto de variáveis hipoté-ticas. Fisicamente, a transformada de Park transforma enrolamentos estatóricos fixos e enrolamentos rotóricos girantes, em enrolamentos estatóricos girantes e rotóricos pseudo-estacionários. Matematicamente, a transformada de Park é definida pela seguinte opera-ção:
[xabc] =P
xdq0
, (3.27)
em que, xabc representam as variáveis no sistema trifásico e xdq0 representam as novas variáveis. A matriz P é denominada matriz de transformação e deve ser regular, ou seja, sua inversa deve existir.
A utilização da transformada de Park tem como principal vantagem simplificar o mo-delo trifásico de uma máquina síncrona em um momo-delo simplificado de dois eixos, em que as indutâncias próprias e mútuas são representadas de maneira constante, diferentemente do modelo trifásico em que as indutâncias próprias e mútuas variam com o tempo, uma vez que no novo referencial os dois eixos giram à mesma velocidadeω.
Na Figura3.2 é apresentado o diagrama esquemático da transformada de Park. Observa-se que o eixo d gira com velocidadeω e se posiciona em um ânguloθem relação a um ponto de referência. Os eixos a, b e c são fixos, enquanto que os eixos d e q giram a velocidadeωe são defasados em 90o.
eixo b
eixo a eixo c
eixo q eixo d
θ ω
Figura 3.2: Diagrama da transformada de Park.
CAPÍTULO 3. GERADOR SÍNCRONO 20 P= r 2 3
cos(θ) cos θ−23π cos θ+23π
−sen(θ) −sen θ−23π −sen θ+23π
1 √ 2 1 √ 2 1 √ 2
. (3.28)
3.4
Aplicação da Transformada de Park no Modelo do
Gerador Síncrono
Utilizando a matriz de transformação de Park, os vetores das correntes, tensões e fluxos são representados da seguinte forma:
idq0
=P[iabc],edq0
=P[eabc],λdq0
=P[λabc]. (3.29) Utilizando a transformada de Park, as expressões dos fluxos estatóricos λa, λb e λc dados pelas Equações 3.4, 3.5 e 3.6, podem ser transformadas em componentes dq0 com a redução adequada dos termos trigonométricos, como segue:
λd=Ldid+La f dif d+Lakdikd, (3.30)
λq=Lqiq+La f dif d+Lakdikq, (3.31)
λ0=L0i0, (3.32)
em queλd representa o fluxo do eixo d;λq representa o fluxo do eixo q;λ0representa o fluxo da componente homopolar e id, iqe i0representam correntes no referencial dq0.
As indutâncias Ldq0são determinadas por:
Ld=−
r
2
3(laa0+lab0+ 3
2laa2), (3.33)
Lq=−
r
2
3(laa0+lab0− 3
2laa2), (3.34)
L0= (laa0−2lab0)
√
3
3 . (3.35)
Os fluxos rotóricos também podem ser representados nas componentes dq0, substi-tuindo as expressões id e iqnas Equações 3.20, 3.21 e 3.22, tem-se que:
λf d =Lf dif d+Lkqikq+
r
3
CAPÍTULO 3. GERADOR SÍNCRONO 21
λkd=Lf dkdif d+Lkdikd+
r
3
2Lakdid, (3.37)
λkq=Lkqikq+
r
3
2Lakqiq. (3.38)
As tensões do estator no referencial síncrono, são dadas por:
ed=−ωrλdq0+
d([λdq0])
dt −Rabcidq0, (3.39)
eq=ωrλdq0+
d([λdq0])
dt −Rabcidq0, (3.40)
em que ed, eqrepresentam as tensões no referencial dq.
A potência ativa fornecida pelo gerador síncrono, representada no referencial sín-crono, é dada pelo produto cruzado entre tensão e corrente, como segue:
p=edid+eqiq. (3.41)
O conjugado elétrico é dado por:
ce= (λdiq+λqid)
P
2, (3.42)
em que ce representa o conjugado elétrico e P representa o número de par de polos. O conjugado mecânico é dado por:
cm=ce−(Jm
dωr
dt +Fmωr), (3.43)
em que cmrepresenta o conjugado mecânico; Fmrepresenta o coeficiente de atrito; Jmé o momento de inércia eωr é a velocidade angular.
3.5
Modelo Linearizado de Heffron-Phillips
CAPÍTULO 3. GERADOR SÍNCRONO 22
eg e 8
re+jxe
Barramento Infinito Gerador
Síncrono
Figura 3.3: Máquina síncrona conectada ao barramento.
O comportamento dinâmico de um gerador síncrono conectado em um barramento in-finito é descrito pelas seguintes expressões (HEFFRON; PHILLIPS, 1952), (DEMELLO; CON-CORDIA, 1969):
ed=
dλd
dt −ωrλq=xe
did
dt −ωrxeiq+e∞senδ, (3.44)
eq=
dλq
dt +ωrλd=xe
diq
dt −ωrxeid+e∞cosδ, (3.45)
λd=E ′ q−x
′
did, (3.46)
λq=−xqiq, (3.47)
λf d =if d−(xd−x ′
d)id, (3.48)
ef d =if d+τ
′ d0
dλf d
dt , (3.49)
e2s =e2d+e2q, (3.50)
cm−ce=M
d2δ
dt2, (3.51)
em queδcorresponde ao ângulo entre o eixo q e o vetor tensão do barramento infinito; xd e xqrepresentam as reatâncias síncrona de eixo direto e em quadratura, respectivamente;
τ′
d0 a constante de tempo de eixo d em circuito aberto da máquina e M a constante de inércia.
eletro-CAPÍTULO 3. GERADOR SÍNCRONO 23
mecânica, quanto a dinâmica do enrolamento de campo. Desta forma, as variáveis do modelo podem ser classificadas em 3 categorias: variáveis de entrada, variáveis de estado e variáveis de saída.
• Variáveis de entrada do sistema:
– conjugado mecânico da Turbina (cm). – tensão de campo do gerador (ef d). • Variáveis de estado que descrevem a máquina:
– ângulo de torque (δ).
– desvio de velocidade (∆ωr).
– a tensão Eq′, proporcional ao fluxo no eixo d do gerador.
• Variáveis de saída:
– ângulo de torque (δ).
– tensão terminal da máquina (es).
Matematicamente, o modelo proposto por Heffron e Phillips (1952) consiste em um conjunto de equações não-lineares, sendo composto por duas equações algébricas e três equações diferenciais. As equações algébricas relacionam o conjugado elétrico com a tensão terminal, sendo as variáveis de estado da forma:
ce= f(δ,E
′
q), (3.52)
es=g(δ,E
′
q), (3.53)
em que f e g são funções não-lineares.
Em relação as equações diferenciais, estas relacionam o conjugado da máquina, a velocidadeωr, o ângulo de potência e a tensão de campo. De forma geral, tem-se:
1. A equação do balanço de conjugado da máquina:
cm−ce=Md
2δ
dt2. (3.54)
2. A relação entreωr eδ(comωr expresso em pu eδem radianos), como segue:
δ=2πf0×
Z t
0 ωr
CAPÍTULO 3. GERADOR SÍNCRONO 24
3. A relação dinâmica entre a tensão Eq′, o efeito da reação da armadura proporcional aδe a tensão aplicada ao campo do gerador, ef d, que é do tipo:
TzdE
′ q
dt +E
′
q=h(δ,ef d), (3.56)
em que h representa uma função não-linear.
O modelo linearizado de Heffron e Phillips (1952) consiste na linearização das equa-ções algébricas (Equaequa-ções 3.52 e 3.53) e das equaequa-ções diferenciais (Equaequa-ções 3.54, 3.55 e 3.56) em relação a um ponto de operação, como segue:
∆ce=K1∆δ+K2∆E
′
q, (3.57)
∆et=K5∆δ+K6∆E
′
q, (3.58)
∆cm−∆ce=M
d∆ωr
dt , (3.59)
∆δ=2πf0×
Z t
0 ∆ωr(t)dt,
(3.60)
K3τ
′ d0
d∆Eq′
dt +∆E
′
q=K3 ∆ef d−K4∆δ
. (3.61)
Reescrevendo a Equação 3.61 em função de∆λf d, tem-se:
∆Eq′ = K3
1+sK3τ′d0
∆ef d−
K3K4
1+sK3τ′d0
∆δ, (3.62)
em que, K1···K6são constantes dependentes do ponto de operação considerado. Considerando Eq′ constante, a Equação 3.57 pode ser reescrita como segue:
K1=
∂ce
∂δ 0 , (3.63)
K1=
xq−x
′ d
iq0
x′d+xe e∞0senδ0+
eq0
xq+xe
e∞cosδ0, (3.64)
CAPÍTULO 3. GERADOR SÍNCRONO 25
Da Equação 3.57, considerando o ângulo interno δconstante, a Equação 3.57 pode ser reescrita e o coeficiente K2pode ser obtido a partir da seguinte relação:
K2=
∂ce
∂Eq′
δ=
constante
, (3.65)
K2=
1
x′q+xe
e∞0senδ0, (3.66)
em que a constante K2 representa a sensibilidade do conjugado elétrico (ce) a variações no fluxo no eixo-d.
A constante K3 depende apenas dos parâmetros da máquina e do sistema de trans-missão, sendo a única constante cujo valor não varia com as condições de operação do sistema, dada por:
K3=
x′d+xe
xd+xe
. (3.67)
Reescrevendo a Equação 3.61, o coeficiente K4é obtido pela seguinte expressão:
K4=−
1
K3
∂Eq′
∂δ 0 . (3.68)
Substituindo a constante K3 da Equação 3.67 na Equação 3.68, tem-se:
K4=
xd−x
′ d
x′d+xe
e∞0senδ0, (3.69)
em que a constante K4representa o efeito desmagnetizante da reação de armadura sobre o fluxo no eixo-d, variando apenas com o carregamento do sistema.
A determinação da constante K5é realizada a partir da Equação 3.58. Neste caso, é necessário considerar Eq′ constante. Desta forma, tem-se que:
K5=
∂es ∂δ 0 , (3.70)
K5=
xq
xq+xe
ed0
es0
e∞0cosδ0−
x′d
x′d+xe
eq0
es0
e∞0senδ0, (3.71) em que K5 representa a variação da tensão terminal (∆es), provocada pela variação do ângulo interno (∆δ) considerando a tensão (Eq′) constante.
Equa-CAPÍTULO 3. GERADOR SÍNCRONO 26
ção 3.58, tem-se que:
K6= ∂
es
∂Eq′
0 , (3.72)
K6=
xe
x′d+xe
eq0
es0, (3.73)
em que K6 representa a variação na tensão terminal (∆es) considerando o ângulo de po-tênciaδconstante.
Da Equação 3.58, tem-se que a variação da tensão terminal (∆es) pode ser relacionada com a mudança do ângulo de potencia (∆δ) e do fluxo por meio dos coeficientes K5e K6. Das Equações 3.62 e Equação 3.58, obtem-se o seguinte modelo dinâmico:
∆es= K3K6
1+sK3τ′d0
∆ef d−
K3K4K6+K5
1+sK3τ
′ d0
1+sK3τ′d0
∆δ, (3.74)
que resulta em:
∆es=∆e ′
s(s) +∆esδ(s), (3.75)
sendo
∆e′s(s) = K3K6 1+sK3τ′d0
∆ef d, (3.76)
∆esδ(s) =
K3K4K6+K5
1+sK3τ
′ d0
1+sK3τ′d0
∆δ, (3.77)
em que a Equação 3.75 representa o efeito causado pela variação do ângulo de potência do gerador síncrono.
O modelo matemático que relaciona a variação da tensão terminal do gerador pela variação na tensão de excitação do gerador, descrito pela Equação 3.74, pode ser repre-sentado por uma função de transferência de primeira ordem:
Ges(s) =
∆e′s
∆ef d(s)
= b
s+a, (3.78)
com
a= 1
K3τ′d0
, (3.79)
b= K6
τ′ d0
CAPÍTULO 3. GERADOR SÍNCRONO 27
Substituindo as Equações 3.79 e 3.80 na Equação 3.78 e realizando algumas opera-ções matemáticas, obtem-se a função de transferência que relaciona a variação da tensão terminal (es) pela variação da tensão de campo (ef d), como segue:
Ges(s) =
K6/τ
′ d0
s+1/K3τ′d0
. (3.81)
3.6
Síntese do Capítulo
Neste capítulo apresentou-se uma descrição matemática do gerador síncrono. Para analisar o comportamento dinâmico do gerador síncrono conectado em um barramento infinito foi apresentado o modelo proposto por (HEFFRON; PHILLIPS, 1952), baseado na linearização de equações não-lineares e equações algébricas.
Capítulo 4
Sistema de Excitação do Gerador
Síncrono
Neste capítulo será apresentado o sistema de excitação do gerador síncrono, bem como os principais componentes que constituem um sistema de excitação de um gerador sín-crono, enfatizando os dispositivos AVR e PSS.
4.1
Estrutura Geral de um Sistema de Excitação
Sistemas de excitação de geradores síncronos são fundamentais em esquemas de con-trole e proteção de sistemas de geração de energia elétrica, sendo fatores imprescindíveis na qualidade da energia e desempenho satisfatório dos SEPs (KUNDUR, 1994). O principal objetivo de um sistema de excitação consiste em realizar o controle da corrente contínua do enrolamento de campo do gerador síncrono, mantendo as tensões terminais dentro de limites de tolerância aceitáveis.
Na Figura 4.1 é apresentado o diagrama de blocos simplificado do sistema de excita-ção de um gerador síncrono.
Δ Δ ΔP, δ ω
es u
efd e*s
,
AVR Excitatriz Gerador
Síncrono
Sensores PSS
CAPÍTULO 4. SISTEMA DE EXCITAÇÃO DO GERADOR SÍNCRONO 29
Basicamente, sistemas de excitação são constituídos pelos seguintes elementos: exci-tatriz, sensores, regulador de tensão (AVR) e PSS. A excitatriz é o elemento responsável por fornecer a energia CC para o enrolamento de campo do gerador síncrono, consti-tuindo o estágio de potência do sistema de excitação. Os sensores são responsáveis pelas medições das grandezas de saída do gerador síncrono, tais como tensão e corrente. O dispositivo AVR é o responsável por processar e amplificar os sinais de entrada utiliza-dos no controle do sistema de excitação, que inclui tanto regulação como estabilização do sistema de excitação. O dispositivo PSS disponibiliza um sinal adicional para o AVR tendo, como principal função amortecer oscilações eletromecânicas do sistema elétrico. Os principais sinais de entrada do PSS são: variação de velocidade (∆ω), variação de potencia (∆p) e variação do ângulo de potência do gerador (∆δ).
4.2
Tipos de Sistemas de Excitação
Os sistemas de excitação de geradores síncronos são classificados com base na fonte de energia de excitação (STD-421.5, 2006), da seguinte forma:
• Sistema de excitação CC: Historicamente, sistemas de excitação deste tipo foram os primeiros utilizados no meio industrial e caracterizam-se por utilizarem geradores CC como fonte de energia de excitação, fornecendo tensão contínua para o enrola-mento de campo do rotor do gerador por meio de anéis deslizantes. Neste tipo de configuração, a excitação pode ser feita de forma separada ou auto-excitada. Sis-temas de excitação CC estão desaparecendo gradativamente, visto que os sisSis-temas antigos estão sendo substituídos por sistemas do tipo AC ou estático.
• Sistema de excitação AC: Utilizam alternadores como principal fonte de energia de excitação do gerador. A saída AC da excitatriz é retificada por meio de retifica-dores controlados ou não-controlados para produzir tensão contínua necessária ao enrolamento de campo do gerador síncrono, sendo os retificadores do tipo fixo ou rotativo.