! " # )
1 (
'( !
) 2 (
) 1 ( ' ( )
* + ,- ' . /+ )
0 1 2- ' 1 3 0 +
) 2 ( ' 5 3 0 + 2- ' 1 0 1 . /+ ) * + ,- '
: 7 8 . 13
/ 12 / 1392 :: ; 8 .
25 / 9 / 1393
*+,-5< 5 ) +' : =+ ' *, . ' 5 ) 3 + 2 ' ?@ A BC <+ ' *, D E. 3 FG *, ,+
H ' I';J
5< K5 *@ . L 1
*+ M A ' B ,-. ( , + N O D L' ' + M A ' K)
. ' *P' Q ? R H
5 ) ) S TU ) P V + K ' K57 0 ' W * +
. ' 5 ' 1 ) 5 ) *P' Q ' : ' 5< *, + K@ +
*@ . L ' X/ . Y' Z5 ' H ) [@ TU ' \5 ' 1L ?] A K ' ' * [@ + ) 5 ) D M A
- *
5 ) *0R . 0 *P' Q . ^\P K ' W + _' . 5 ) ' * [@ + ) 5 ) D )
*2 K) ' H ' -
*P' Q 5< *U] ` D + ( ' 5 ) 1*P' Q _ 2 K 5< UW _ a P H57 0 V H b . '
)
UW _ a K c< _ G+ Kde<+ J +
5 ) ' 5+ B,-+ . ' )
+ *+ N 5A * [@ ' \5 ' K)
K c f 5 K< G+ . ' K57 ? ) P . +ga h . J K i c ' h . 5 )
5 ) D 8 *P' Q )
) 5 ) * ' ) 1_ KJ .j 0 . ' - )
k *+ .
./ 0/
:
*@ . L 1i c ' h . KJ .j 0 1* [@ + 5 ) 1D E. 3 FG 5< 1H ) : 1M A
.
Design of a Sliding Mode Controller for Two
2
Wheeled Balancing
Robot
Ehsan Abbasnejad(1) – Abbas Harifi(2)
(1) MSc - Department of Electrical & Computer Engineering, Hormozgan University e.abn23@gmail.com
(2) Assistant Professor - Department of Electrical & Computer Engineering, Hormozgan University abbasharifi@yahoo.com
Nowadays, the control of mechanical systems with fewer inputs than outputs (Under-actuated systems) has become a challenging problem for control engineers. Two-wheeled balancing robots is one of the appealing examples of this category. This type of robot contains two parallel wheels and an inverted pendulum. In this research, designing of controller have been investigated for flat surfaces. For controller design, the extract dynamics of the system has been achieved based on Kane's method. Then for the two-wheeled balancing robot, one sliding mode controller has been designed for yaw angle, and another sliding mode controller has been designed to control both position and pitch angle based on a proposed sliding surface. The main feature of the proposed controllers is that all of controllers have been designed based on the nonlinear dynamics of system. Also, considering the limits of uncertainties while designing systems, the robustness of controllers have been increased. The common problem of sliding mode control is chattering phenomenon that has been greatly reduced using saturation function instead of sign function. Simulation results comparision of the designed controller with a LQR controller, validates the effectiveness of the proposed controller.
Index Terms: Two wheeled balancing robot, TWIP, Kane’s method, under-actuated system, LQR.
: 34# #(3
1 'R ( ca 3 <P' l P' 1*+g ' ' O 2- '
1 O e.abn23@gmail.com
1 2 * 5
5< ' O KoJ Ko co< o5 ) ' o . ' ' Ko) *
*+ 1 5o< Do E. 3 oFG o 1
*o+ o + o5 ) . o
5< K) ' H GGE+ ' I cE+ i p + D D E. 3 FG
q7 1 K dG B + D . da ' * 5<0 ` *+ -+ ' o< 13 Ko ? o) oV + Ko .
5< o E. 3 oFG L K ' *o+ *oP' Q D
H o b . o )
r E+ K) *+ 2 5< ' *]
*+ B,-+ A Ko 1 o
*+ B c. D E. 3 FG 5< o5 ) op P oP ';o@ . o 0
5< o5 ) oda 2 ' ?@ A B <+ ' *, D E. 3 FG
. '
L 5o< K5o Ho ' ' I o] o=+ Do M A *@ . o
*+ *+ K) o L D ' *c ) . ' 3O 3' . 2
5o< Do
K ' N O 3
H 7 Q M A . B+ 5< H ' . 7 0 V
*+ K 3 o,+ Ko L o G5 ' . ^\P K\ s 3 + K)
L K 0 H ' *@ 5 ) S hW' . ' a ' V + 1 o
. K 0 K ' ' tA M A 5-0 ' G+ H L K) '
o2 KoUG Ko KoUG Do ' o] . 3 ' ' 3 ' 5 . ) ) P
? R *@ . L K + _ '
*+ ' M A ' 3' .
: ) K5 0
• _ ,+ *@ . L 5<
M A
• *@ . L 5 ) ld5Z+
M A
L Kd J ' 1 5< _ ,+ uE K) *F] *@ .
*+ 1 ' @ . 3 ) . 3' .
K 2 ) M A L 4
K)
H @ ) H v . 2000
) ' K5] ]
1 [ ) .
*J 7 + 5 5,@' 5 ' ' ' ) . L Q c. '
N O L H @
( , + ' M A
1986 . ] D + D *J 7 +
] L . ^\P K ' ) 5+ K) ' O KJ y' ' ' \5 ' ) ^\P ' L . 5
] 2 [ ,d .
2002 L UW 5 ) K < ' . K 1 .
K -+ '
K5] K ' . < 2 K K UW 1 J D ' ]
*+ K< G+ 2 K UW )
] 3 [ .
3' , r g) 2005
KC' ' 2 K c *@ . L D
) + . ' Y' Z5 ' L *p + 1? R H ' .
zd5+ ' 7' _ 6
K c 5 ) D *c . )
*@' 25 '
) *G5-+ PID ( 7 K ' a' 3O * W'
' K57 0 ' W ? + O + K5] ]
4 [ 3 ' . 8
1
3' _ K *. L
D ~ , • D ' L H ' . ' K . '
z ) . H @ ) 5d 7 O *J ] K) f I 5 K57 0 1 '
' ] 5 [ *+ . ) 5 ) i V ' ' _ ' ) 3' .
? R ' < . ' ' W *d) K5 K _ '
L H b a L K K) *
K5] *d *U] + D '
*U] ) 5 ) D ' K57 0 V 5< ' L ) P *U] ` D + K KJ . +' . ' 0 *P' Q
? R *] 13O ,d a c ' z G.
' *U]
* ) K + *+ *P' Q *U] ` ) 5 )
. 0
) 5 ) Lj G+ 2 *] - L '
3' , *@ . ' 0
]
6
[
: ' ' *, + Lj +
R ' 0j 9 H ) 10 O K * -+ Lj + K : . '
\5 ' + *, + Lj + H ' . ' + 3O
'
3 Q' K) . ' K@ G+ H ' L W € G ' +' H ' . ' ' ] * j
? R 5 ) 2
1*, + Lj + X/ . '
KUG P D L . ^\P ' ' *U] .
) 5 ) LQR
11 + ' K@ G+ H ' . ' *P' Q
\5 ' 3' , *@ *, + . '
] 7 [ ) 5 ) D
Lj + K@ G+ H ' . ' KC' ' B+ ) Kc. + * [@ + *U] ' *, + 5 ) D @ P q7 K
5 ) D ' ' _ G+ ) S;P ' *c . )
U . ' *P' Q : -5`' ]
8 [ 5 ) D )
*c . *G5-+ 12 * 3O K) 1 ' *P' Q * [@ +
5 ) K c< <+ . ' K57 c *@ + * [@ + )
K@ G+ ] 7 [ ] 8 [ *U] f 5 H5 ' L ] _ a 1
*+ ' * . *5 ) ' 3' .
? R H ' N ' . O K
3' , 13 ] 9 [ • U ) P V + K ' *@ . L D
) * ' c K ' L . ) 5 ) H ' A . '
*+ ^\P * ] KJ' + L a 5 ) * U] +' 1 )
* [@ TU D H57 0 V . ' 14
5 ) *P' Q J
S Q KF G H ' J ) Q H . '
] 10 [ D
*@ M A *@ . L e. * 5c+ D K dG Kd _ K 1r E5+ uw-car
*, + + ( ' . ' K5]
+ ) 5 ) + . 1* [@ + + . : 5< ‚ G ' . ' *P' Q H57 0 + . a 5 ) ' * [@
K@ G+ H ' ]
9 [ ] 10 [ *+ + K) ) ' zdU+ H ' K 3' .
. ^\P K ' 1 ' O KJ ' ' . 5< *, + *+ L W +
. ' V S L ?] A K ' '
\5 ' *@ 5 ) ' +ga h . ' Lj G+ ' *q *q ' b h . D i c ' h . ' Lj G+ 2
K .
' \5 ' N 5A ? ) ' +ga h . J .
K
=+ 3' a ]
11 [ h . ' |) s | s /(
s +
) \5 ' 2 ' . '
) \5 ' *U] * [@ + ) 5 ) ' K) Lj G+ *+ 1 '
3' .
' 3' ,
15 ] 12 [ 3' , ' 1 16
] 13 [ Q K . _
3' , 1m ] ]
) 5 ) 3 _ G+ 3 ' 3 - ' ' 5< 5+' da ) K c . '
5 ) R.' 5 ' _ ` ' zd`' * [@ + ) 2 *@ 5 )
' *+ \5 3' , ƒ' F .
] 14 [ D 3' a K * [@ + '
) \5 ' *J ] KGdP <. . '
17 3' , ] 15 [ K _ 0 :
) _ ` ' ' * [@ + 5 ) : zGa . '
) 5 ) 2 ' *+ *U] `
Ko o o ) 5 ) K 3' .
K) l @ h . K
Kd 3' , ) ]
16 [ ] 17 [ *oP' Q
K c 3O o- • oQ o 5 ' . _ '
Do o o
) 5 ) LQR
o+ o Ko@ G+ Ho ' . o ' o K< G+
. o ' ' O KoJ ' ' o . 5o< *, + ]
18 [ ' o
' 5 ) L . ^\P K * 5 *G cU. 5 ) ' ?] A K
*coFa K,co ' o K RBF
o ) o5 ) . o ' o \5o '
L ?] A K ' 5< K L 5< K . ' o+ o Ko@ G+ Ho ' . o ' o B ,-. ( , + N O ) P
. ' *U] 5< *, +
?Z K@ G+ H ' D + _
H ) : ' \5 ' 5<
' +O K ]
6 [ _ ' BP' + _ . B+ _ ?Z .
*P' Q J 5 )
) *+ . K K) Q
5 ) D 13O ' <W D L K ?] A K ' ' )
' BP 3 Kde<+ ]
19 [ hW' K) _ <W .
5 ) *P' Q *d ' <W ' V + )
L K 5<
3 FG D E. *+ B a 5 ) D 1 ) * [@ + )
' *P' Q
' K) TU
* [@ 3O ' _ \+ \5 ' 5< *, +
5< B) ' Kde<+ 1 _ ?Z ' _ <W . ' *+ • U+ ) 5 ) D _ A <W .
LQR K< G+ '
: *P' Q -. '
„ 5 ?Z _ A K c f 5
) 5 ) 3 _ G+ 2 K) ' KC' ' 5< UW _ a B G+ -*+ 5+' J +
.
2
6. (
5< *, + B dE. ' :
H. + *\d5Z+ 1 d '
H ' ' _' ) ' \5 ' ' J ... H ) 13 5d 1R ' 0j : *+ ) P Lj + Y' Z5 ' K + .
*@
: H ' ' _' ) *0 b 3' + L \5+ 1ld5Z+ B <+
*+ z + : . ' * <J D. + 1K@ <+ v ' * ' .
* <J A *, . W J 13
Kc E+ _ @
X,a . H . *d @'
\5 ' H ) : ' *, + B dE. ' K@ G+ H ' . '
Kc E+ K : H ' X,a
*d @'
<
h . '
* \5 ' • ' _ <J' I 5 a ' _ j P H a .
a ' 5 ' : H ' . Kc E+ *+ a
18 I Z5 ' *+
*+ a L F5Z+ * + …5-+ ' + 5- K) 19
*+ .
a I 5 K ' *U]
a z<P ' *+ a
*+ K5 3 -. G5-+ a Kc E+ ' X X/ .
* J
KU ' O 3 ' ' W *+ K 5< D +
O ] 20 [ :
(
)
(
)
... , 12 k
. M v . F H
. a
. v m
N 1 i
k i i k i i N
1 i
Gi k i Gi k i i
=
ω + =
ω
+
∑
∑
=
= ( 1)
K) mi
1 <J _ J
k i
v a 1* J
Gi
a K ' I 5 1 '
k i ω
K ' * J a 1 '
Gi
H K ' ) P ' ' '
i
F
i
M
<J K K) 1 ' 5-0 i
*+ ' _' KU ' .
) 1 1( N ' .
_ <J' k a K € + X ' . ' *+ a
B dE. '
) B, ' 3 - 25 ' L 1
*+ \5 ' 1( .
R
d
G
1 n 2
n
3
n
ψ
φ
x
b
1
τ
2 τ
O
Y
X
Z
) B, 1 a' L p 7 L F5Z+ 25 :(
Fig. (1): Coordinate system of the robot and assumption of exerted forces
) B, 1 1(
1 τ 2 τ M A 5-0 z . . K tA '
1
x 1 W + φ . ^\P K ' ψ
*+ L ?] A K ' .
) J 1 ' O 5< 5+' G+ ( ]
6 [.
Table (1): Mechanical parameters of robot [6]
) J 1 L *, ,+ 5+' G+ :( ]
6 [
d ' Kd 7 M A E+ . _ J ) +
0.1 m
ms
K _ J 5 kg
I2
J K *-] A * ' 2
n 3 2 3.679 10 kg m× −
I3
J K *-] A * ' 3
n
3 2
28.07 10 kg m× −
b Kd 7 lF M A H
0.1 m
R M A i 0.073 m
mc
M A _ J 0.503 kg
*+ K L K ) P Lj + 1„ 5 : O
) ( sin d m cos d m x ) m m ( 3 R 2 2 s s s c 2 1 ψ + φ φ + φ φ − + = τ + τ
− (2)
φ ψ φ φ + ψ + φ + + = τ − τ cos sin d m I sin d m m R 2 1 L 3 ) ( R L 2 s 2 2 2 c c 2 2 2
1 (3)
(
)
φ + φ φ φ + φ − − + φ = τ + τ sin gd m cos sin d m I d m x cos d m s 2 2 s 3 2 s s 21 (4)
_ 7 K ' Lj + * [@ + 5 ) V + K *5P' ' *+ B c. @ P q7 ' 5 ' 3O K) )
5<
*+ L K : 2 1 2 2 1
1 , u
u =τ+τ =τ −τ (5) ' *@ . L . ^\P K ' : ' M A
[
]
(
)
[
]
(
)
(
+)
(
+)
− φ= φ φ + + = ψ + φ φ φ − φ + φ φ φ + = + = − φ = φ φ φ φ φ 2 2 s 3 2 s c s s c s 1 2 2 2 2 s s 2 2 s c s 1 1 1 1 1 1 1 cos d m I d m m m 3 q R cos d m m m 3 b ) ( sin cos d m sin gd m cos sin d m m m 3 f u b f u b f q 1 ) 6 (
*+ K L K L ?] A K ' : O
[
]
(
)
22 2 s c 2 2 2 2 s 2 2 2 2 2 2 2 I sin d m m R ) 2 / 1 ( L 3 q R L b cos sin d m f u b f u b f q 1 + φ + + = ψ = φ ψ φ φ − = + = + ψ = ψ ψ ψ ψ ψ ) 7 (
*@ . L W + ' : ' M A
φ − + + = + + φ = ψ + φ φ + − + φ φ φ φ = + = − = 2 2 2 s 3 2 s c s 3 2 s s x 3 2 2 s 3 2 s 2 2 2 s x 3 1 3 3 1 x 3 x 3 cos d m ) I d m ( ) m m ( 3 qx R I d m cos d m b ) ( sin gd m ) I d m ( ) g cos d ( cos sin d m f u b f ] u b f [ qx 1 x ) 8 ( 3 2
*P' Q J _ ' BP' + _ . B+ <W H ' *+ ) 5 ) ) 5 ) D 1 ' ?Z K) Q K .
*+ - ?] A K ' ' <W hW' K) _ ?Z .
5< ' V + ) 5 ) *P' Q *d ' 3 FG L K
*+ B a D E. 5 ) D 1 )
*P' Q ' * [@ + )
*+ \5 ' 5< *, + _ \+ ' 3O * [@ TU ' K)
*+ ' L c†' K l @ h . D l . _ ?Z . *+ K5]' *P' Q ) 5 )
* _ A ?Z
? ) ' *+ KC' ' N 5A
5 ) D ?Z
) LQR *+ *P' Q * [@ + ) 5 ) K< G+ ' . 3 2 2 2
8- *( 9
3 2 2 2 1 2
*/4# 3+
) D E. 3 FG *U] ` 5< 9
. 2 V ' (
*@ 5 ) H57 S
u2
+ K) ' E K 1 @ P [5
ψ
1
I dU+ [5+
d
ψ
UW _ a J ' KU ' O
) 9 . ) z G . ( ≤ ≤ = = ≤ ≤ < < − + = ψ − − + + − + − 2 2 2 1 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 B b / bˆ B , b / b B b b bˆ b bˆ b 0 F ) x ( fˆ ) x ( f u b f ) 9 ( 3 2 2 2 2 2 :*/4# :
*+ l . L K * [@ TU ( ' H ' : ψ λ + ψ = ψ − ψ λ + ψ − ψ = ( ) ~ ~
s2 d 2 d 2 (10)
K@ + P
0 s2=
. BP 2 2 d 2 2 2 d 2 2 2 2 d 2 bˆ ~ fˆ uˆ 0 ~ u b f ~ s ψ λ − ψ + − = ⇒ = ψ λ + ψ − + = ψ λ + ψ − ψ = ) 11 (
) + K) 12
) ' *@ 5 ) ( 13
*+ V ( . 0 ψ λ − ψ + −
= fˆ ~
ueq2 2 d 2 (12)
)] s sgn( . k u [ bˆ
u eq2 2 2
1 2
2 = −
− (13)
…cQ P ] 14 [ *+ K L K
: O 2 eq 2 2 2 2
2 B (F ) (B 1)u
k ≥ +η + − (14)
3 2 3 2 ;' *( 9 <. =3 > 3
3 2 3 2 1 2
*/4# 3+
. 2 V ' *U] ` 5<
S *@ 5 ) H57 u1
@ P [5+ K) ' E K 1 x
φ
I dU+ [5+ xd
0 d =
φ
UW _ a J '
) KU ' O 15
3 2 3 2 2 2 */4# :
B @ K 5< K, ' K c< 5 ) ' ' D E. 3 FG
*+ 5< ' O KJ 5 ) *P' Q ' + : ' 1
* ) ) \5 ' 3' .
. L K * [@ TU ( ' H '
*+ -: + λ = φ φ − φ λ + φ = x ~ x ~ s 2 d d 1 1 ) 16 (
I Z5 ' @ P q7 ' * [@ TU D z . . H *+ K - * [@ TU K) *+ 2 )
KU ' …cQ ) B + \ )
17 *+ ' S' ' 1( . → ⇒ → → φ → d 1 x x 0 x ~ 0 0
s (17) ) ?Z 3 4 1 ( KU ' L c†' K )
17 *+ ( ‡ 7 J H ' . '
*+ KU ' ) )
17 . ' W ( K@ + P
0 s1=
BP ] 14 [ . 1 1 1 1 1 1 1 1 3 1 bˆ fˆ uˆ 0 u b f
s =φ+λ φ= + +λ φ= ⇒ =− −λ φ ( 18)
) + 19 ) ' *@ 5 ) ( 20
*+ V ( . 0 φ λ − −
= 1 1
1 eq fˆ
u (19)
)] s sgn( . k u [ bˆ
u 1 eq1 1 1 1
1= −
− (20)
…cQ P ] 14 [ *+ K L K
: O 1 eq 1 1 1 1
1 B (F ) (B 1)u
k ≥ +η + − (21)
3 2 4 2 ( @ A 3 2 4 2 1 2
3BA ( @ A
C
?Z B+ *@ . L 5< 5 ) ' K) K 0 3 *+ K KJ . K) ' L ?] A K ' 5 ) ' ?Z .
*+ . K ' W + K c< 3O ) 3 ' + *5P' K ' .
D 5< D L K ' 5 ) *J ] D
*5P' K 3O ?] A K ' 5 ) ‡ 7 +' . ' L c†' B W
*+ 1I dU+ ' G+ D 5< D L K ' 5< D + 3' .
L W +) *J ] K '
. (K V : 7 0 φ + φ φ φ + φ − − + φ = τ + τ φ φ + φ φ − + = τ + τ − sin gd m cos sin d m ) I d m ( x cos d m sin d m cos d m x ) m m ( 3 R s 2 2 s 3 2 s s 2 1 2 s s s c 2 1 ) 22 (
*+ *5P' K p H ' ' TU ' 3 - 3' .
: [@ s1
K
B + K) ' H ' + K5, +' . ' ] ' \ 3 ) TU : [@ K \ * q. KA J ' K) φ x ~
*+ B + \ K ) ˆ ‡ 7 d 1 1
s =φ+λφ−φ
K *+ *5P' K) ' 3 - 3' . K) *.
1
s
1 0 \
φ
K
d
φ
' @ P H ' . ) ' ] B +
0
= φ = φ
:K 5 1
1 s
c m )x u
m ( R
3 + =− (23)
1 d s
d
sd cos x m gdsin u
m φ + φ = (24) KU ' h J ) 23 ) ( 24 : ' ( 0 sin x gd m ) m m ( R 3 cos d m d s s c d
s φ + + + φ = (25)
† ‡ 7 3 )' a
: L K gd m ) m m ( R 3 a s s c +
= (26)
: ' 0 sin x a cos g 1 d
d + φ =
+
φ (27)
0'
x
~
z
1=
x z=KU ' H57 0 V ‡ 7 ) 16 : ' ( 2 2 1 1 2 1
d x x z z
~+λ =λ +λ
λ =
φ (28)
*+ 3 )' ) *U] ` K@ + 3' . 27
) ‡ 7 …cQ ' ( 28
D K (
*U] ` 5< )
29 . ) B c. ( α + λ + λ λ + λ − = = g ) z z ( cos ) z z ( sin g z z z 2 2 1 1 2 2 1 1 2 2 1 ) 29 (
3' , 3 7' ' K) U ]
21 22 [ ' * [@ TU H '
3' , N ' ' -]
9 10 [ *@ . L '
M A ) 5< ' * ' 1 )
29 P ' 3O (
UG . K [z1 z2]=[0 0]
*+ *U] ' K 5 . )
*U] 5< : '
T 2
1 z ]
z [ Z , Z . A
Z = = (30)
:3O K) ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ = 1 2 1 2 2 1 1 1 z z z z z z z z
A (31)
: ' K 5 + λ − + λ − = z z ag 1 g ag 1 g 1 0 z
z (32)
. + KFZ-+ K@ + P X
K) * O '
s
*+ (g j [5+ y' ' 3 W …cQ .
) *U] 5< 1 5 32
: K5 ' 0' ' *c + ' ( 0 ag 1 g , ag 1 g > + λ +
λ (34)
K, ' K KJ . g 1 1
λ
1 2λ
1α
† 5< \ ' 50) € 34 *+ O ( S' ' 1 - * [@ TU K 5 .
x
φ
*+ O ' . 3 2 4 2 2 2
/ ( @ A
a' ' 5< *d) ' * ' *@ 5 )
) 17 ) ( 25 *+ K57 0 V L K l @ h . 1( :
(
)
(
)
2d 1 2 2 2 2 2 1 2 1 ~ ~ 2 1 s 2 1 s 2 1 V φ − φ λ + φ + ψ λ + ψ = + = ) 35 (
K c< …5-+ H57 0 P . ' H + c=+ h . D h . H ' : ' 3 + ) ~ ~ ( s ) ~ ~ ( s s s s s
V = 1 1+ 2 2 = 1 φ+λ2φ + 2 ψ +λ2ψ (36)
) Lj + ';2 J X/ 9 ) ( 15 ) ( 36 : ' (
[
]
) ~ ) ) s ( sgn k ~ fˆ bˆ ( b f ( s ) ) ) s ( sgn k fˆ bˆ ( b f ( s V 3 d 3 3 3 d 2 1 2 2 2 2 1 3 3 1 3 1 3 3 3 1 φ λ + φ − − +φ −λ φ−
+ + θ λ + − θ λ − − + = − − ) 37 ( ';2 J ) fˆ f ( fˆ f = + −
) Lj + H b 11
) ( 12 (
) K@ + 37 : ' ( 0 |] s | k s | F ) 1 B ( [ |] s | k | s | F ) 1 B ( [ )] s sgn( k F ) 1 B ( [ s )] s sgn( k F ) 1 B ( [ s V 2 2 2 2 2 1 3 1 3 3 2 2 2 2 2 1 3 3 3 1 < − − − + − − − ≤ − − − + − − − = ) 38 ( KU ' ) 38 *+ 3 - ( l @ h . K)
V . ' *c + ' 1 3 2 5 2
E ( 8F
: ' *, 3 „gcW K) U ' \5 ' N 5A ? )
' H ' . ' +ga h . J K i c ' h . ) Lj + (
18 (
) 25 *+ ' [. L K ( . ) )] s ( sat k uˆ [ bˆ
u 1 1 1 1
1
1 = −
− (39)
)] s ( sat k uˆ [ bˆ
u 2 2 2
1 3
2 = −
− (40)
*+ l . L K i c ' h . K) : ≥ < = sat sat b | x | ) x ( sgn b | x | x ) x (
sat (41)
3 2 6 2 LQR
*P' Q ' LQR
. O K ' 5< *U] + ' 5 '
5< @ P q7 K@ + . KUG P
T T
e [ x x] [0 0 0 0 0 0]
x = φ φ ψ ψ =
*U]
*+ L K :
) 42 ( x = Ax+ Bu
y = Cx+ Du T 3 3 T ] [ u , ] x x [
x = φ φ ψ ψ = α β (43)
= 0 0 0 1 0 0 0 0 0 0 1 0 0 0 0 0 0 1 0 0 179 . 2 0 0 0 0 0 0 0 0 0 0 0 73 0 0 0
A (44)
− − − − = 0 0 0 0 0 0 699 . 1 699 . 1 12 . 68 12 . 68 15 . 24 15 . 24
B (45)
KU ' K h . 8 1K @ P D 7 3 O K ' ) 46 K@ + BP ( ) *. ,
48 *+ K ( : O
∫
′ + ′= (x Qx u Ru)dt
J (46)
K=R-1B'P (47) P B PBR Q PA P A
P= ′ + + − 1 ′
− − (48) 3 I Z5 ' ' UW < . +
Q R ' D H ' BP
*+ K) [5+ ' K) ' ' ]
†k. K5 '
5-. K ' L H ' 5-.X, @ ' ' W 5- c=+ ' G+
φ
' ' ] * j ' ' .
X . + 3 z . . H Q
1 R '
*+ I Z5 ' L K . ) = = 1 0 0 1 R , 20 0 0 0 0 0 0 1 0 0 0 0 0 0 1 0 0 0 0 0 0 1 0 0 0 0 0 0 1 0 0 0 0 0 0 1 Q ) 49 (
*+ K L K *. , K@ + BP K 5 : O − − − − − − = 1623 . 3 7071 . 0 0529 . 6 2444 . 3 7144 . 0 0867 . 1 1623 . 3 7071 . 0 0529 . 6 2444 . 3 7144 . 0 0867 . 1
K ( 50)
4 2 9 A *.
<W ' K c M A *@ . L + J Simulink ' 7' _
zd5+ B, . ' \5 ' _' 0 r d
*+ 3 - ' 5< K c .
) B, 2 _' 0 r d :( Simulink
' 7' _ zd5+
Fig. (2): Simulink block diagram in MATLAB
4 2 1 2 9 A *. H(
B, ) 3 ) 1( 4 ) ( 5 S' E ' K ' 1L . K ' z . . K (
5 ) L W + L LQR
' 3 - UW _ a 3
*+ -+ K) Q 3 . ' ) 5 )
LQR H '
*+ 5 ) ' 5< * ] K @ P K c ' . )
*+ .
' 5< 5+' ]
8 [ ) J K) ' Y' Z5 ' 1
' G+ (
V + K … GE. H ' . ' ‚Z-+ 5+' ' 0 dJ
1hJ + L G5-+ K p h . @ . I dU+
xd=2m
90
d =
ψ
5d 7 ' ca ' X )
a s /( a +
K
a' 5< K c _ ' ' . '
=)' P K) ‡ 7
. + 5-0 30 N.m
*+ 5+' KdP +
5 ) K 0 K ) ' 5< K *@ a' 5-0 K) 0 V . '
. , . P H '
÷ B, ) 3 5 ) L . ^\P K ' :( LQR
UW _ a 3
Fig. (3): Pitch Angle of robot with LQR controller without considering limits of uncertainties
) B, 4 :( ) 5 ) L ?] A K ' LQR
UW _ a 3
Fig. (4): Yaw angleof robot with LQR controller without considering limits of uncertainties
) B, 5 ) 5 ) L * J :( LQR
UW _ a 3
Fig. 4: Position of robot with LQR controller without considering limits of uncertainties
* W' ' +' K c 3 .
1 100 K _ J UW _ a %
. K57 0 V L
) B, 6 ) 5 ) L . ^\P K ' :( LQR
UW _ a
Fig. (6): Pitch angle of robot with LQR controller of considering limits of uncertainties
) B, 7 ) 5 ) L ?] A K ' :( LQR
UW _ a
Fig. (7): Yaw Angle of robot with LQR controller considering limits of uncertainties
) B, 8 ) 5 ) L W + :( LQR
UW _ a
Fig. (8): Position of robot with LQR controller considering limits of uncertainties
0 1 2 3 4 5 6 7 8 9 10
-60 -40 -20 0 20 40
time (sec)
P
it
c
h
A
n
g
le
(
D
e
g
)
0 1 2 3 4 5 6 7 8 9 10
0 20 40 60 80 100
time (sec)
Y
a
w
A
n
g
le
(
D
e
g
)
Actual Desire
0 1 2 3 4 5 6 7 8 9 10
-0.5 0 0.5 1 1.5 2 2.5
time (sec)
P
o
s
it
io
n
(
m
)
Actual Desire
0 1 2 3 4 5 6 7 8 9 10
-150 -100 -50 0 50 100 150
time (sec)
Pi
tc
h
A
n
g
le
(
D
e
g
)
0 1 2 3 4 5 6 7 8 9 10
0 20 40 60 80 100
time (sec)
Y
a
w
A
n
g
le
(D
e
g
)
Actual Desire
0 1 2 3 4 5 6 7 8 9 10
-0.5 0 0.5 1 1.5 2 2.5 3
time (sec)
P
o
s
it
io
n
(
m
)
B, K) Q 3 )
6 )1 ( 7 ) ( 8 *+ KVPg+ ( 5 ) 1
) LQR qP W + . ^\P K ' 5 ) K W
* L _ J UW _ a .
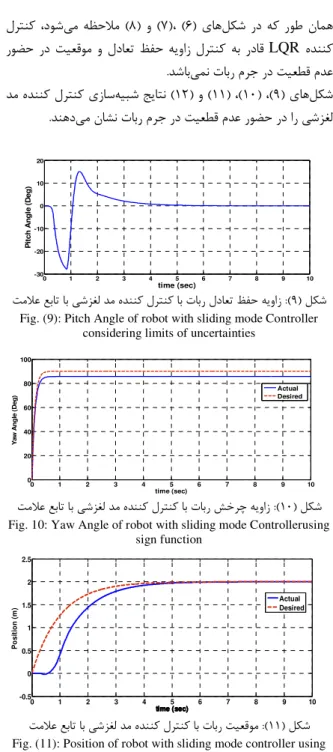
B, ) 9 ) 1( 10 ) 1( 11 ) ( 12 K c f 5 ( ) 5 )
+
*+ 3 - L _ J UW _ a qP ' * [@ .
) B, 9 +ga h . * [@ + ) 5 ) L . ^\P K ' :(
Fig. (9): Pitch Angle of robot with sliding mode Controller considering limits of uncertainties
B, ) 10 ) L ?] A K ' :( +ga h . * [@ + ) 5
Fig. 10: Yaw Angle of robot with sliding mode Controllerusing sign function
) B, 11 +ga h . * [@ + ) 5 ) L W + :(
Fig. (11): Position of robot with sliding mode controller using sign function
B, ) 12 M A 5-0 :( +ga h . * [@ + 5 )
Fig. (12): Torques of wheeled of robot with sliding mode controller using sign function
B, K) Q 3 )
9 ) 1( 10 ) 1( 11 ^\P K ' z . . K K) (
*+ L W + ?] A K ' 1L . -+
*+ 1
UW _ a ' - * [@ + ) 5 ) J +
*+ _ G+ 5< B, .
) 12 *+ 3 - ( 2 K)
L M A 5-0)
da K 1( ' tA
N 5A ' ' L K *@ 5 ) +ga h . ' \5 ' *+ ';@ . h . ' ) 5 ) N 5A ? ) ' … GE. H '
\5 ' +ga h . J K i c ' .
) B, 13 i c ' h . * [@ + ) 5 ) L . ^\P K ' :(
Fig. (13): Pitch angleof robot with sliding mode controller using saturation function
0 1 2 3 4 5 6 7 8 9 10
-30 -20 -10 0 10 20
time (sec)
P
it
c
h
A
n
g
le
(
D
e
g
)
0 1 2 3 4 5 6 7 8 9 10
0 20 40 60 80 100
time (sec)
Y
a
w
A
n
g
le
(
D
e
g
)
Actual Desired
0 1 2 3 4 5 6 7 8 9 10
-0.5 0 0.5 1 1.5 2 2.5
time (sec) time (sec) time (sec) time (sec)
P
o
s
it
io
n
(
m
)
Actual Desired
0 1 2 3 4 5 6 7 8 9 10
-20 -15 -10 -5 0 5 10 15 20 25
time (sec)
R
ig
h
t
W
h
e
e
l
T
o
rq
u
e
l
(N
.m
)
0 1 2 3 4 5 6 7 8 9 10
-30 -20 -10 0 10 20 30
time (sec)
L
e
ft
w
h
e
e
l
T
o
rq
u
e
(
N
.m
)
0 1 2 3 4 5 6 7 8 9 10
-25 -20 -15 -10 -5 0 5 10 15 20
time (sec)
P
it
c
h
A
n
g
le
(
D
e
g
B, ) 14 :( 5 ) L ?] A K ' h . * [@ + )
i c '
Fig. (14): Pitch Angle of robot with sliding mode controller using saturation function
B, ) 15 :( * [@ + ) 5 ) L W + i c ' h .
Fig. (15): Position of robot with sliding mode controller using saturation function
B, ) 16 M A 5-0 :(
i c ' h . * [@ + 5 ) '
Fig. (16): Right wheeled torque of robot with sliding mode controller using saturation function
B, ) 17 M A 5-0 :(
i c ' h . * [@ + 5 ) tA
Fig. (16): Left wheeled torque of robot with sliding mode controller using saturation function
B,
) 13 ( ) 15 ?] A K ' 1 . ^\P K ' z . . K (
) B, . ' ' 3 - i c ' h . L W + L 16
(
) 17 - ' 5< *@ 5 ) 2 ( *+ 3
N 5A K)
. ' K57 ? ) * ] K 3O
5 2 .I *J.
5 ) D … GE. H ' *@ . L 5 ) ' * [@ + )
K) ' H ' *P' Q ) 5 ) *0R . 0 *P' Q M A _ a *P' Q _ 2 *P' Q 5< *U] ` + ( ' J + UW . ' K57 0 V 5< 5+'
) 5 ) D - : K< G+ ' H b LQR
*P' Q 5< ' . 0
f 5 K c L
*@ . M A
*+ 3 - 5< UW _ a J _ a L 5 ) K)
) LQR +' . ' *c + 8 3 *U] ` K KJ .
* [@ + 5 ) 1*d a v ' UW _ a J 5< cW B W 8 K@ G+ H ' *P' Q *+ KC' ' .
3 - K)
*+ 5 ) UW _ a B G+ * ] K * [@ + )
*+ _ G+ 1 5< 5+' K c f 5 H b .
.
*+ i c ' h . ' \5 ' K) K
? ) +ga h . J
< *@ 5 ) 2 J + N 5A †‹+
*+ .
@ :< 3
1- Underactuted system 2- Mobile Robot 3- Inverted Pendulum 4- Segway
5- KazauoYamafugi 6- MATLAB
7- Proportional -Integral-Derivative 8- David Anderson
9- Lagrange 10- Kane
11- Linear-quadratic regulator 12- Proportional -Derivative 13- Huang,J. et al
14- Sliding surface 15- Wu, J. et al 16- Yau, H. et al 17- Tsai, C. et al 18- Generalized Speeds 19- Generalized Coordinates
0 1 2 3 4 5 6 7 8 9 10
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
time (sec)
Y
a
w
A
n
g
le
(
D
e
g
)
Actual Desired
0 1 2 3 4 5 6 7 8 9 10
-0.5 0 0.5 1 1.5 2 2.5
time (sec)
P
o
s
it
io
n
(
m
)
Actual Desired
0 1 2 3 4 5 6 7 8 9 10
-25 -20 -15 -10 -5 0 5 10 15
time (sec)
R
ig
h
t
w
h
e
e
l
T
o
rq
u
e
(
N
.m
)
0 1 2 3 4 5 6 7 8 9 10
-15 -10 -5 0 5 10 15 20 25
time (sec)
L
e
ft
w
h
e
e
l
T
o
rq
u
e
(
N
.m
References
[1] S. Inc, "Simply moving", Available from: http://www.segway.com/, 2012.
[2] K. Yamajuji, T. Kawamura,"Postural control of a monoaxial bicycle", Journal of the Robotics Society of Japan, Vol. 7, No. 4, pp. 74–79. 1989.
[3] T. Blackwell, "How to build a self balancing scooter", http://tlb.org/scooter.html, 2005.
[4] M. Clark, J. Field, S. Mc Mahon, Phililps, "EDGAR, aself-balancing scooter", University of Aadelaide. 2005. [5] A.D. nBot Balancing Robot, Available from: http://www.geology.smu.edu/~dpa-www/robo/nbot/, 2008.
[6] D.Y. Lee, Y.H. Kim, B.S. Kim, Y.K. Kwak, "Dynamics and control of non-holonomic two wheeled inverted pendulum robot", pp. 373-381, Springer 2006.
[7] S.W. Nawawi, M.N. Ahmad, J.H.S. Osman, "Control of two-wheels inverted pendulum mobile robot using full order", Proceedings of the International Conference on Man-Machine Systems, Langkawi, Malaysia, Sep. 2006 [8] S.W. Nawawi, M.N. Ahmad, J.H.S. Osman, A.R. Husain, M.F. Abdollah, "Controller design for two-wheels
inverted pendulum mobile robot using PISMC", Proceeding of the IEEE/SCORED, pp.194–199, Selangor, June 2006.
[9] J. Huang, Z.H. Guan, T. Matsuno, T. Fukuda, et al., "Sliding-mode velocity control of mobile-wheeled inverted-pendulum systems", IEEE Trans. on Robotics, Vol. 26, No. 4, pp. 750-758, 2010.
[10] H. Jian, F. Ding, T. Fukuda, T. Matsuno, "Modeling and velocity control for a novel narrow vehicle based on mobile wheeled inverted pendulum", IEEE Trans. on Control Systems Technology, Vol. 21, No. 5, pp. 1607-1617, 2013.
[11] N.M.A. Ghani, N.I.M. Yatim, N.A. Azmi, "Comparative assessment for two wheels inverted pendulum mobile robot using robust control", Proceeding of the IEEE/ICCAS, pp. 562–567, Gyeonggi-do, Oct. 2010
[12] J. Wu, Y. Liang, Z. Wang, "A robust control method of two-wheeled self balancing robot", Proceeding of the IEEE/IFOST, pp. 1031–1035, Harbin, Heilongjiang, Aug. 2011.
[13] H.T. Yau, C.C. Wang, N.S. Pai, M.J. Jang, "Robust control method applied in self-balancing two-wheeled", pp. 268-271, Wuhan, Nov./Dec. 2009.
[14] D.S. Nasrallah, H. Michalska, J. Angeles, "Controllability and posture control of a wheeled pendulum moving on an inclined plane", IEEE Trans. on Robotics, Vol. 23, pp. 564–577, 2007.
[15] C.C. Tsai, S.Y. Ju, "Trajectory tracking and regulation of a self-balancing two-wheeled robot: A backstepping sliding-mode control approach", Proceedings of the IEEE/SICE, pp. 2411–2418, Taipei, Aug. 2010.
[16] Z. Kausar, K. Stol, N. Patel, "Stability region estimation of statically unstable two wheeled mobile robots", Proceeding of the IEEE/ROBIO, pp. 1379–1384, Karon Beach, Phuket, Dec. 2011.
[17] Z. Kausar, K. Stol, N. Patel, "Nonlinear control design using lyapunov function for two wheeled mobile robots", Proceeding of the IEEE/ M2VIP, pp. 123-128, Auckland, Nov. 2012.
[18] T. Ching-Chih, H. Hsu-Chih, L. Shui-Chun, "Adaptive neural network control of a self-balancing two-wheeled scooter", IEEE Trans. on Industrial Electronics, Vol. 57, No. 4, pp. 1420-1428, 2010.
[19] J.J.E. Slotine, W. Li,"Applied nonlinear control", Prentice Hall, 1991.
[20]H.A. Shirazi, "Dynamic analysis, simulationand control ofuniaxialtwo-wheelvehicles", M.Sc. dissertation, Mechanical Engineering, University Sanaati Sharif, 2011.
[21] H. Ashrafiuon, R.S. Erwin, "Sliding control approach to underactuatedmultibody systems", Proceeding of the IEEE/ACC, pp. 1283–1288, Boston, MA, USA, June/July 2004.